九州大学学術情報リポジトリ
Kyushu University Institutional Repository
Shape Memory Alloy Motion Displayによる生物をモ チーフにした実体ディスプレイの表現
中安, 翌
九州大学大学院芸術工学府デザインストラテジー専攻
https://doi.org/10.15017/26575
出版情報:Kyushu University, 2012, 博士(芸術工学), 課程博士 バージョン:
権利関係:
Shape Memory Alloy Motion Display による 生物をモチーフにした実体ディスプレイの表現
Representation of Animal and Plant Motifs in a Substantial Display using a Shape Memory Alloy Motion Display
中 安 翌
Akira Nakayasu
2013 年 3 月
目 次
第1章 序論 . . .
1.1 はじめに. . .
1.2 実体ディスプレイとは . . .
1.3 研究の背景 . . . .
1.3.1 コンピュータを取り巻く実世界指向の動き. . .
1.3.2 さまざまな実体を用いたディスプレイ . . .
1.4 研究の目的 . . .
1.5 研究の方法 . . .
1.6 本論文の構成 . . .
第 2 章 Shape Memory Alloy Motion Display(SMD) . . .
2.1 はじめに . . .
2.2 アイデアとモチベーション . . .
2.3 SMD の原理 . . .
2.4 形状記憶合金アクチュエータ . . .
2.4.1 形状記憶合金の特徴 . . .
2.4.2 形状記憶合金アクチュエータの採用. . .
2.5 SMD の関連研究 . . .
2.6 SMD の特徴 ― 生物の存在感を提示するディスプレイ装置 . . .
第 3 章 Himawari: 向日葵をモチーフにした植物型ロボット . . .
3.1 はじめに . . .
3.2 作品制作の背景 . . .
3.3 作品コンセプト . . .
3.4 作品概要 . . .
3.5 関連研究 . . .
3.6 設計 . . .
3.6.1 デザインコンセプト . . .
3.6.2 花と茎のデザイン . . .
3.6.3 インタラクションデザイン . . .
3.7 実装 . . .
1 1 1 3 3 5 9 9 10 11 11 11 12 13 13 14 16 16 17 17 17 18 19 19 21 21 21 23 25
3.7.1 制御システム. . . .
3.7.2 形状記憶合金アクチュエータ . . .
3.7.3 電圧制御回路. . .
3.7.4 形状記憶合金アクチュエータの動きの制御 . . .
3.8 展示による評価と考察. . .
3.9 まとめ . . .
第 4 章 plant: 葉群がざわめくインタラクティブアート作品 . . .
4.1 はじめに. . .
4.2 作品概要. . .
4.3 関連研究. . .
4.4 設計 . . .
4.4.1 インスタレーションの設計. . .
4.4.2 葉群のデザイン . . .
4.4.3 インタラクションデザイン. . .
4.5 実装 . . .
4.5.1 制御システム. . .
4.5.2 形状記憶合金アクチュエータ . . .
4.5.3 電圧制御回路. . .
4.5.4 形状記憶合金アクチュエータの動きの制御. . .
4.6 展示による評価と考察 . . .
4.7 まとめ. . .
第 5 章 Tentacles: 触手が蠢くインタラクティブアート作品 . . .
5.1 はじめに. . .
5.2 作品コンセプト . . .
5.3 作品概要. . .
5.4 関連研究. . .
5.5 設計 . . .
5.5.1 インスタレーションの設計 . . .
5.5.2 触手ドームのデザイン . . .
5.5.3 インタラクションデザイン . . .
5.6 実装 . . .
5.6.1 制御システム . . .
5.6.2 形状記憶合金アクチュエータ . . .
25 26 29 30 32 34 35 35 35 36 36 36 38 39 39 39 41 42 43 44 46 47 47 47 48 49 49 49 50 51 52 52 54
5.6.3 電圧制御回路. . .
5.6.4 形状記憶合金アクチュエータの動きの制御. . .
5.6.5 LED の光の制御. . . .
5.7 展示による評価と考察. . .
5.8 まとめ . . .
第 6 章 考察 . . .
6.1 はじめに ― 研究方法としての作品制作 . . . .
6.2 SMD が生み出す生物の存在感 . . .
6.3 3つの形状記憶合金アクチュエータの開発 . . .
6.4 高度な体験のためのインタラクションデザイン . . .
6.5 SMD の可能性 . . .
6.5.1 SMD による情報提示. . . .
6.5.2 SMD の応用 . . .
第 7 章 結論 . . .
7.1 本研究のまとめ. . .
7.2 今後の展望. . .
謝辞
参考文献・映像 研究に関わる実績
57 58 59 60 62 63 63 63 66 68 70 70 71 72 72 74
本研究は、機械構造物の動きによって、生きているような存在感が生まれる表 現の単純な面白さに着目したものである。それは、生物の構造や動きを模倣する ことによって実現しようとするロボット研究や、生命プロセスをソフトウェアや ロボットを使ってシミュレーションする人工生命の研究のように、生物の構造や 生命の真理を解き明かそうとするものではない。
オートマタ(自動機械人形)やからくり人形が余興や娯楽として楽しまれてい たように、「つくりもの」の機械構造物が生きているように見えるということは、
それだけで人の興味を引きつける魅力がある。人形浄瑠璃や糸操り人形のように その種(仕組み)は明らかであっても、それを生み出す人間の技や、人形の生き ているような動きに面白さを感じるのと同様に、生命のない無機物の集合である 機械構造物に、単純な模倣ではないデフォルメや演出をほどこすことで生物の存 在感を生み出し、エンターテイメントやアートとしての表現に昇華させ、それを 実体ディスプレイに応用することを目指した。
第 1 章 序 論
1.1 はじめに
本研究で取り扱う実体ディスプレイとは、光の構成要素の集合である映像ディ スプレイには不可能な、実体のモノの構成要素の動きや変形によって情報提示 を行う装置である。近年、このような実体ディスプレイが Human Computer Interaction (以降 HCI) の研究分野で発表されており、注目を集めている。
「実体ディスプレイ」のように、実体を用いたディスプレイ装置を意味する言 葉は他にも存在する。廣瀬は、デジタルパブリックアートの研究 [1] の中で「実 体型ディスプレイ」という言葉を使っている。また、石井らは Super Cilia Skin [2] の研究の中で「Physical Display」という言葉を使っている。これらの言葉は、
おおよそ同じ意味を表すものであるが、本論文では筧らの研究 [3] の中で使われ ている「実体ディスプレイ」(Substantial Display)という言葉を用いる。
1.2 実体ディスプレイとは
図
1-1
映像ディスプレイと実体ディスプレイの違い図 1-1 は、映像ディスプレイと実体ディスプレイの違いを表した図である。映 像ディスプレイ(図 1-1 左)では、光の構成要素の集合を使って視覚の情報提示 を行っている。それに対して、実体ディスプレイ(図 1-1 右)は、視覚の情報提 示に加えて、構成要素の動きや変形による実体のモノの存在感を持つものである。
図 1-2 は、実体ディスプレイのこれらの特徴を表したものである。また、実体ディ スプレイは図 1-2 左側のように、視覚の情報提示の他に触覚の情報提示の可能性 を持つものであるが、本研究では取り扱っていない。
肉体という実体を持つ人間にとって、実体のモノの存在感を利用した実体ディ スプレイは、映像ディスプレイや投影による仮想のコンテンツと比較して、より 直感的に訴えることが可能である。その応用範囲は、情報提示装置としてのディ スプレイに留まらず、インターフェースやアート表現を融合することで、新しい 情報環境デザインやメディア表現を生み出す可能性を秘めている。
実体ディスプレイ
情報提示 実体のモノの 存在感
(視覚 , 触覚)
実体ディスプレイが注目されている背景として、技術的には実体ディスプレイ の構成要素の駆動に関わるアクチュエーション技術や制御技術の急速な発達が挙 げられる。また、コンピュータを取り巻く実世界指向の動き、建築やアート分野 の動向もその背景として考えられる。本節では、これらの実体ディスプレイの背 景について、いくつかの事例を紹介しながら述べる。
1.3 研究の背景
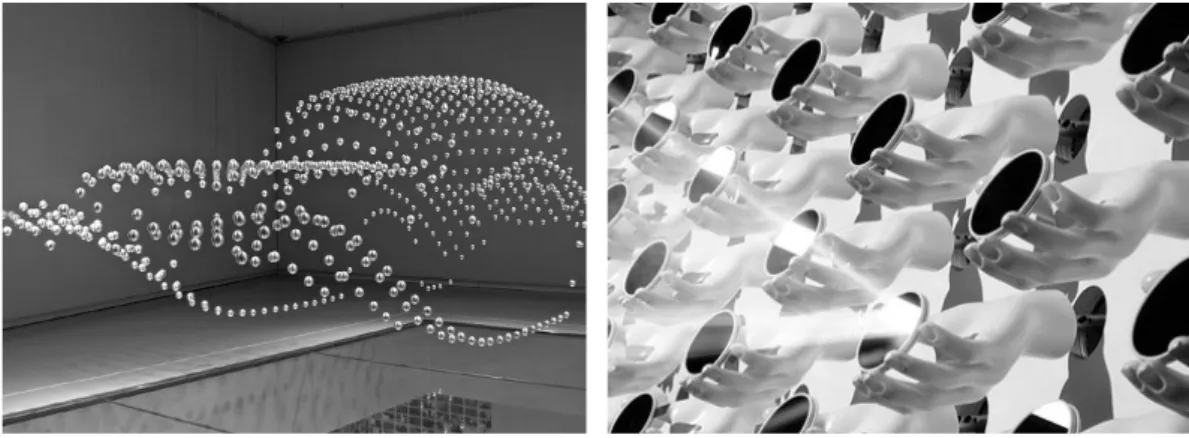
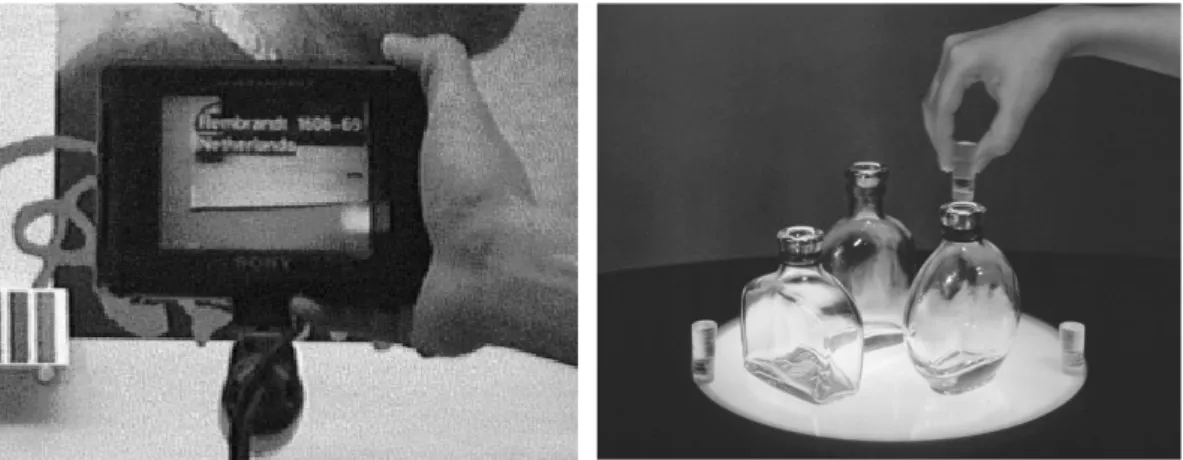
コンピュータを取り巻く実世界指向の動きは、人間とコンピュータの関わり合 いについての研究を行う HCI の領域に見ることができ、その発端は Ubiquitous Computing に遡ることができる。Weiser, M は 1991 年に発表した論文「The Computer for the Twenty-First Century」[4] の中で Ubiquitous Computing を 提唱し、人間の生活環境の至るところにコンピュータが存在し、環境に溶け込む ことでコンピュータの存在がユーザから見えなくなる未来が到来することを示唆 した。しかしながら、この Ubiquitous Computing は、言葉としての直接的な 意味である「どこにでもあるコンピュータ」と論文中で示されたプロトタイプで ある情報通信端末から、モバイル・コンピューティングを指す言葉として広ま り、「環境に溶け込んで見えなくなるコンピュータ」という本来のコンセプトが 抜け落ちてしまった [5]。その後、Weiser, M が提唱した本来のコンセプトであ る「環境に溶け込んで見えなくなるコンピュータ」は、実世界指向インターフェー スや Tangible User Interface に継承され、具現化されていく。暦本は、実世界 での人間の作業を支援する実世界指向インターフェース [6] の多くの事例を提案 している。1994 年に暦本が発表した NaviCam [7](図 1-3)は、ビデオで撮影 された実空間の風景にコンピュータの情報を合成表示させる装置であり、現在の Augumented Reality(拡張現実感)[8] の事例として有名なセカイカメラ [9] の 先祖とも言える。石井らが 1997 年に発表した論文「Tangible Bits」[10] の中で 提唱した Tangible User Interface は、触ることができる実体のインターフェー スのコンセプトである。その事例である musicBottles [11](図 1-4)は、ガラス 製ボトルのフタの開け閉めという単純な操作だけで音楽や人の声が聞こえてくる 作品であり、石井が Weiser, M のコンセプトを具現化した作品でもある。
1.3.1 コンピュータを取り巻く実世界指向の動き
HCI の 一 研 究 領 域 で あ る Virtual Reality( 人 工 現 実 感 )[12] で も、 ユ ー ザが仮想世界に入りこむ没入感を重視した初期の研究から、近年では前述の Augumented Reality(拡張現実感)を含む Mixed Reality(複合現実感)[13]
の研究に注目が集まっており、仮想世界と現実世界を融合する実世界指向の研究 にシフトしてきていると言える。
さ ら に、 ニ ュ ー ヨ ー ク 大 学 の 教 育 プ ロ グ ラ ム と し て 始 ま っ た Physical Computing [14] は、コンピュータにセンサーやアクチュエータ等を接続して、
物理的な現実世界とコンピュータをつなぐ新しい可能性を模索する活動として世 界各地の研究・教育機関へ広がり、デザインやアートのための教育方法や実験方 法として定着し始めている。
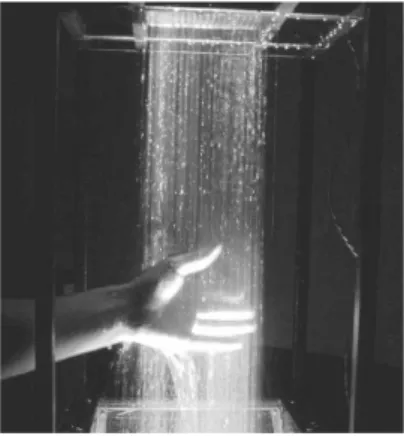
このような実世界指向の動きの中で、ディスプレイに関わる研究も行われてい る。廣瀬らは、デジタルパブリックアート [1] に関する研究の中で、「空間性」や「実 体性」をキーワードにしたディスプレイの研究を行っている。図 1-5 はその「空 間性」をキーワードにした研究事例の水滴ディスプレイ [15] である。落下する 水滴に同期した映像を投射することで、3次元空間に立体的に映像を映し出すこ とができる空間充填型のディスプレイ装置である。図 1-6 は「実体性」をキーワー ドにした事例の
Strino Plant Instrument [1 6 ] である。センサーのひずみゲージを植 物に装着することで、人がその植物に触れたり、風に揺れることで音が鳴るもの である。また筧は、このような新しい素材を使ったディスプレイについて、実
世界の素材感を生かしたこれまでにない情報環境のデザインが可能になる未来の ディスプレイであると述べている [17]。図
1-3
NaviCam
図1-4
musicBottles
1.3.2 さまざまな実体を用いたディスプレイ
実体ディスプレイのような実体の素材を利用したディスプレイ装置は、HCI の 研究以外に建築やアートの分野にも存在する。ここでは、前述したものとは異な る HCI の事例と建築やアートの事例を合わせて紹介する。
ま ず 始 め に、HCI の 研 究 事 例 を 紹 介 す る。 図 1-7 の Recompose [18] は、
Relief [19] を発展させてジェスチャー操作を可能にしたもので、投影面の凹凸 を制御して、映像と立体面を組み合わせた 2.5 次元の情報を提示することができ る。構成要素を上下運動させるこのようなディスプレイ装置は、Feelex [20] の 頃からいくつかの研究例が見られるが、近年では Tangible User Interface [10]
の研究の流れの中でユーザインターフェースと情報提示の両面から研究されるこ とが多い。図 1-8 は、演奏のためのインターフェースに実体の動きを取り入れた PocoPoco [21] である。アレイ状に配置されたボタンを押したり回したりするこ とで、演奏パターンや音響効果を操作することができ、ボタン自体が上下運動す る物理的な形状変化によって演奏情報をリアルタイムに表示することができる。
図
1-5
水滴ディスプレイ 図1-6
Strino Plant Instrument
図
1-11 SnOil
図1-12 Shade Pixel
図
1-9 Water Logo
図1-10 Shaboned Display
また、情報提示装置の事例として、構成要素の素材に水を用いたものがある。
図 1-9 の Water Logo [22] は、特殊な撥水性の布上の水滴によって文字を表示 することができる。図 1-10 の Shaboned Display [23] は、素材にシャボン玉を 採用したものである。このような固形物ではない素材を用いた場合、「水滴が染 み出て文字が表示された後に流れる」(Water Logo)、「シャボン玉が大きくなっ て割れる」(Shaboned Display)といった素材の形状変化が、ディスプレイ装 置としての大きな特徴になっている。
図 1-11 は、素材に磁性流体を採用した SnOil [24] である。SnOil は、電磁石 を用いて磁場を制御することで、磁性流体に凹凸を生成して情報提示を行って いる。SnOil では、この磁性流体を使ったディスプレイのコンテンツ例としてビ デオゲームの Snake [25] を取り上げている。図 1-12 の Shade Pixel [26] は、
マトリックスに配置したソレノイドを制御して、スパンデックス繊維のスキン をへこませることで数字や文字の情報提示を行っている。
図
1-13 HypoSurface
図1-14 Flare Facade
次に、建築分野の事例について紹介する。HypoSurface [27](図 1-13)は、
建築における新しいデザインコンセプトである Hypersurface Architecture [28]
の事例である。前述の研究事例 Recompose と似て壁面の凹凸を制御するもの であり、文字、ロゴの表示やインタラクティブに動作することも可能である。
Flare Facade [29](図 1-14)は、ファサード(建物表層)の構成要素であるメ タル片が動き、太陽光の反射率を変えて外観を変化させるものである。
次に、アート分野の事例を紹介する。図 1-15 は、構成要素の素材に木片を利 用した Woodden Mirror [30] である。作品中央に設置されたカメラの画像を解 析し、木片の傾きによって映像表現を実現しており、鏡のように鑑賞者を映し 出すことができる。作者の Daniel Rozin [31] は、木片の他にもメタル加工した 球体やゴミ片などの素材を用いて異なる表現を持った作品を制作している。図 1-16 の Flow 5.0 [32] は、構成要素の素材に小型のファンを採用し、ファンが回 転している時と静止している時の見え方の差を利用して、インタラクティブな表 現を行っている。風を起こすと同時に視覚効果も楽しめる作品である。
図
1-17 Kinetic Sculpture BMW
図1-18 Mobility
これまで紹介したように実体を持ったディスプレイ装置は、実体の存在感を生 かしてインパクトの強い情報提示が可能であり、研究者やデザイナー、アーティ ストからも注目され、分野を越えて研究、制作が行われている。
実体を持ったディスプレイ装置は、その素材や機能もさまざまなものがあるが、
このようなディスプレイ装置に共通する特徴として、映像ディスプレイのように 解像度の高い情報表示を目指すのではなく、構成要素である素材の特徴を生かし たディスプレイ装置になっていることが挙げられる。実体ディスプレイは、その 構成要素が持つ実体の動きと存在感、さらにはそこから生まれる表現を生かすこ とが重要だと考える。このことは、本研究の実体ディスプレイを考える上で重要 な視点であり、本論文でもこの表現に焦点を当てて研究を行っている。
図 1-17 は、BMW ミュージアムの Kinetic Sculpture [33] である。この作品は、
天井から吊り下げられた金属球を制御して、3次元形状を表現することができる。
図 1-17 では BMW の過去の名車のアウトラインが表現されている。Mobility [34]
は、鏡に反射した光で文字を作ることができるものだが、その鏡は図 1-18 にあ るように手のロボットが動かしている。反射した光による視覚表現だけでなく、
装置自体の表現と合わせた作品になっている。
1.4 研究の目的
本研究では、実体ディスプレイの構成要素に形状記憶合金アクチュエータを採 用した Shape Memory Alloy Motion Display というコンセプトを提案し、その 基盤技術の確立を目指す。そして、この Shape Memory Alloy Motion Display によって実現する生物をモチーフにした「葉群のざわめき」や「触手の蠢き」の 表現とその可能性について追求する。
また、本研究は生物をモチーフにするものではあるが、生物の構造の分析や模 倣を行うのではなく、機械構造物が生き物のように動くということの単純な面白 さに着目し、デフォルメや演出を加えることによってそこに生まれる表現を追求 する。実体ディスプレイに生きているかのような動きと存在感を加えた新しい ディスプレイ表現やアート表現を探ることを目指したものである。
本研究は、技術的には実体ディスプレイの構成要素に柔らかく曲がる形状記憶 合金アクチュエータを採用していることが特徴であり、そのコンセプトを Shape Memory Alloy Motion Display として提案する。そして、この Shape Memory Alloy Motion Display による形状記憶合金アクチュエータの動きの集合が、「葉 群のざわめき」や「触手の蠢き」の表現を実現することを、3 つのインタラクティ ブアート作品「Himawari」、「plant」、「Tentacles」の制作、展示を通して検証 し、Shape Memory Alloy Motion Display の可能性も含めて考察していく。なお、
本研究では実体ディスプレイの情報提示に関する検証は行っていないが、情報提 示の応用可能性については考察で述べる。
本研究のように実体の動きが生み出す表現や生物の存在感を研究対象とする場 合、完成度の高いプロトタイプとしての「作品」の中で評価を受けることが、そ の有効性を示す効果的な方法だと考える。そのため、本研究ではアート作品の制作、
展示による評価を繰り返す過程で、研究成果を積み上げていく方法をとっている。
また、本研究で制作した 3 つのインタラクティブアート作品はそれぞれ独立し た作品であり、それぞれに関連研究の調査、形状記憶合金アクチュエータと制御 システムの開発、作品制作、展示、アートコンペティションへの応募、国際会議 での発表、学術論文執筆という研究活動を行っており、巻末の「研究に関わる実 績」にあるように評価を得ているものである。
1.5 研究の方法
本論文の構成を以下に示す。第1章の序論では、実体ディスプレイの解説、研 究の背景、研究の目的と方法、論文の構成について述べた。第 2 章では、本研究 で提案する実体ディスプレイのコンセプトである Shape Memory Alloy Motion Display について、その素になったアイデアとモチベーション、原理と特徴につ いて述べる。第3章から第 5 章までは、Shape Memory Alloy Motion Display の事例として、3 つのインタラクティブアート作品「Himawari」「plant」「Ten- tacles」について紹介し、その制作過程における Shape Memory Alloy Motion Display の基盤技術の開発について述べる。また、作品の展示における評価か ら、Shape Memory Alloy Motion Display で実現する表現について検証する。
第 6 章では考察として、Shape Memory Alloy Motion Display で実現した表現、
Shape Memory Alloy Motion Display の技術の核となる形状記憶合金アクチュ エータの開発、Shape Memory Alloy Motion Display の可能性について述べる。
第 7 章では結論として、本研究のまとめと今後の展望について述べる。
1.6 本論文の構成
第1章 序 論
第2章 Shape Memory Alloy Motion Display (SMD) 第3章 Himawari: 向日葵をモチーフにした植物型ロボット 第4章 plant: 葉群がざわめくインタラクティブアート作品 第5章 Tentacles: 触手が蠢くインタラクティブアート作品 第6章 考 察
第7章 結 論
Shape Memory Alloy Motion Display
による 生物をモチーフにした実体ディスプレイの表現Shape Memory Alloy Motion Display (以降 SMD)は、構成要素である形状 記憶合金アクチュエータが曲がることによって、装置全体で「葉群のざわめき」
や「触手の蠢き」の表現を行う実体ディスプレイのコンセプトである。本章では、
この SMD の素になったアイデアとモチベーション、SMD の原理、構成要素で ある形状記憶合金アクチュエータ、SMD の関連研究と特徴について述べる。
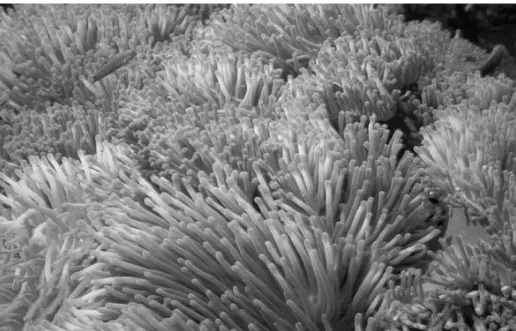
SMD は、草木が風に揺れる様子(図 2-1)やイソギンチャクの触手が波間に 揺れる様子(図 2-2)にインスピレーションを受けて発想したものである。人が このような自然の情景や生物の営みを目にした時、心奪われる瞬間がある。本研 究では、現実世界の現象である「葉群のざわめき」や「触手の蠢き」を実体ディ スプレイの表現として取り入れることで、鑑賞者の情感に訴える表現を持つディ スプレイ装置が可能になると考えた。
図 2-1 木(左)や草(右)が風に揺れる様子
第 2 章 Shape Memory Alloy Motion Display (SMD)
2.1 はじめに
2.2 アイデアとモチベーション
図 2-3 は、SMD の原理を図解したものである。SMD は、構成要素が直立して 曲がるアクチュエータの動きによって、装置全体で「ざわめき」や「蠢き」の表 現を行うものである。
図 2-2 波間に揺れるイソギンチャク
2.3 SMD の原理
また、SMD では形状記憶合金アクチュエータの外装をデザインすることによっ て、見た目の異なる表現を行う。図 2-3 の左側では、造葉を取り付けることで「葉 群のざわめき」を表現することができる。図 2-3 右側では、外装にシリコンチュー ブを採用することよって「触手の蠢き」を表現することができる。
金属に変形を与えても、加熱することで元の形状に回復する現象を形状記憶効 果(Shape Memory Effect, SME)と呼び、このような合金は形状記憶合金(Shape Memory Alloy, SMA)と呼ばれている。また、形状記憶合金の中でも 1960 年 代に発見された Ti-Ni 合金は形状記憶特性が特に優れており、Ti-Ni 系の形状記 憶合金が現在の主流となっている。図 2-4 は、形状記憶合金の形状回復の現象を 表した図である。
形状記憶合金は温度によって特性の変化する合金であり、大きく3つの温度特 性、自由変形の形状を維持できる温度、形状を回復させる温度、形状が定着(形 状記憶加工処理)する温度に分けられる。この温度は、形状記憶合金の材質によっ て様々であるが、一般的に知られている形状記憶合金は、常温で自由変形が可能、
50 〜 60℃に温めると形状回復するもので、形状定着には 350 〜 400℃の加熱 が必要になる。
ここでは、SMD の構成要素である形状記憶合金アクチュエータについて、そ の駆動源である形状記憶合金の特徴、形状記憶合金アクチュエータを採用した理 由について述べる。
2.4 形状記憶合金アクチュエータ
2.4.1 形状記憶合金の特徴
図 2-4 形状記憶合金の加熱による形状回復
SMD は、構成要素のアクチュエータが柔らかく曲がることが特徴である。こ のような柔らかく曲がるアクチュエータは軟体アクチュエータと呼ばれ、その駆 動源や機構には様々なものが考えられる [36][37]。本研究では、SMD のプロト タイプとなる作品制作を行う上で、小型(全長 5cm 以下)で近接して配置する ことを前提条件としており、この条件下での軟体アクチュエータの駆動源や機構 を検討した。
例えば、駆動源に空気圧やモータを用いた場合、駆動源のコンプレッサやモー タが大きいため、小型のアクチュエータを開発する場合、駆動源をアクチュエー タ内部に入れることができない。図 2-6 は、空気圧やモータを用いた場合の駆動 系の構成図である。
2.4.2 形状記憶合金アクチュエータの採用
また、Ti-Ni 系の形状記憶合金は、形状記憶特性が優れているだけでなく、通 電加熱で容易に形状記憶効果を発生できるため、様々なアクチュエータの動力と して注目されている [35]。図 2-4 のような単純な形状の記憶だけでなく、図 2-5 のように、ワイヤー状で加熱冷却することで長さ方向が伸縮するものや、スプリ ング状のものも開発されている。
図 2-5 ワイヤー状(左)やスプリング状(右)の形状記憶合金
本研究では第3〜5章までの 3 つの作品制作の過程で、この形状記憶合金アク チュエータの開発を行った。これらのアクチュエータ開発の詳細については、各 章で述べる。
図 2-7 形状記憶合金を用いた時の駆動系
図 2-6 空気圧やモータを用いた時の駆動系
また、本研究では多数のアクチュエータを用いるため、駆動系のコンプレッサ やモータ、減速機等の機構を合わせた装置が大きくなる。このことは装置製造に おける作業量の増大だけでなく、輸送や展示における障害にもつながる。さらに、
作品展示に利用する装置としては、音はできるだけしないことが理想的であり、
空気圧やモータでは駆動音が発生するため好ましくない。
一方、駆動源に形状記憶合金を用いた場合(図 2-7)は、アクチュエータ内部 に駆動源である形状記憶合金を入れて、電圧を加えるだけで駆動することが可能 になり、駆動系の装置や機構を排除することができる。また、形状記憶合金は、
その素材自体が曲がったり伸縮する物理的な変形を行うものであるため、柔らか く曲がる有機的な動作をすることに適している。駆動音も発生しない。さらに、
形状記憶合金は電圧の PWM(Pulse Width Modulation、パルス幅変調)制御 によって、その形状変化を容易に制御することができる。
以上の検討結果から、軟体アクチュエータとして形状記憶合金アクチュエータ を選択した。
2.6 SMD の特徴
— 生物の存在感を提示するディスプレイ装置実体ディスプレイは、映像ディスプレイのような高精細な情報表示を目指すも のではなく、抽象化した表現を物理的な動きや形状変化の集合により実現するも のである。さらに、実体ディスプレイは、従来の2次元平面の映像ディスプレイ にはできない、実体の3次元立体構成及びその存在感を提示することができる。
SMD は、このような実体ディスプレイの特徴を決める表層のアクチュエーショ ン技術のコンセプトの一つであり、構成要素に柔らかく曲がる形状記憶合金アク チュエータを採用して、装置全体で「葉群のざわめき」や「触手の蠢き」という、
生物をモチーフにした表現を行うことができるものである。このことが、これま での実体ディスプレイとは異なる特徴である。そして、「葉が揺れる」「触手が曲 がる」という単なる動きだけではなく、そこから生まれる生物が持つ存在感を生 み出すことを目指したものである。
SMD の原理に似た関連研究としては、Super Cilia Skin [2](図 2-8)が挙げ られる。Super Cilia Skin は Tangible User Interface の研究として触知覚のイ ンターフェースを含めたインタラクティブサーフェースに関する研究である。そ のコンセプトは SMD に近いもので、草が風に揺れる様子にインスピレーション を受けて、構成要素が揺れるインターフェースの研究を行っている。しかしなが ら、Super Cilia Skin で示されているプロトタイプでは、触知覚のインタラクティ ブ性を重視したものになっており、構成要素は曲がらず、カタカタ倒れる動きと なっている。これは SMD の目指す、構成要素がやわらかく曲がる動きの集合に よる「ざわめき」や「蠢き」の表現が実現できるシステムとは言えない。
2.5 SMD の関連研究
図 2-8 Super Cilia Skin
のコンセプト図(左)とプロトタイプシステム(右)本章では、SMD をロボット表現に応用したインタラクティブアート作品
「Himawari」(映像参照 URL [V1])について述べる。Himawari は、植物の向日 葵をモチーフにして制作した植物型ロボットである。この Himawari の制作、展 示を通して、SMD が実現する表現の可能性について考察する。
Himawari は、「街じゅうアート in 北九州 2008」[38] への参加により制作し たアート作品である。「街じゅうアート in 北九州」は、2004 年から NPO 法人 創を考える会・北九州が主催して行っている美術展覧会である。「アート&テク ノロジー」をテーマに、アーティストが北九州の企業とコラボレーションを行い、
企業の技術力や製造している素材を利用してアート作品の制作を行うものであ
第 3 章 Himawari : 向日葵をモチーフにした植物型ロボット
図 3-1
Himawari展示風景3.1 はじめに
3.2 作品制作の背景
る。アートを通して、地元のものづくりに目を向けようというイベントである。
Himawari には、医療用制御装置を開発している企業(吉川工業株式会社)の サーボモータ制御技術を利用し、北九州の市花である「向日葵」を題材にしてロ ボットを制作した。地場産業のテクノロジーを利用して北九州市の象徴である向 日葵を造形した。全体のデザイン、システム設計、プログラム開発、花部分の製 作を中安が担当し、サーボモータの制御システムの開発、茎部分の製作を吉川工 業株式会社が担当した。
生物学的には動物と異なり中枢神経のない植物は、ものを考えることをせず、
ただじっと生を営んでいる。しかしながらその生態(光合成を行い、花が咲き、
虫を使って受粉することなど)を観察すればするほど、植物にはなんらかの意思 があるように思えてならない。向日葵は太陽へ向かって花を咲かせる。(図 3-2)
実際に生長が盛んな若い向日葵は太陽に正対するように動き、朝には東を向いて いたものが夕方には西を向く。日没後はまもなく起きあがり、夜明け前にはふた たび東に向く [39][40]。首をかしげ、太陽へ向かって咲いている様は、まるで何 らかのメッセージを発しているように見える。
3.3 作品コンセプト
図 3-2
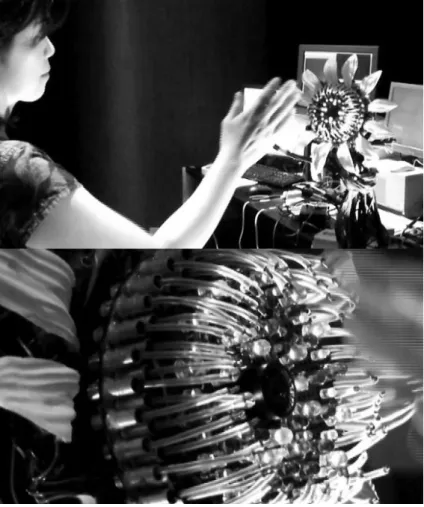
太陽に向かって咲く向日葵Himawari は、花部分中央にある赤外線カメラを目として、人の動いた方向へ 近づく。茎部分はサーボモータで駆動する。花部分には 2 種類の LED が取り付 けられている。1 つは赤外線 LED で、人の動作を解析する赤外線カメラのため の光源である。もう 1 つは、人の動きに反応して輝く白色 LED である。さらに、
触手、花びらの駆動のために SMD の構成要素である形状記憶合金アクチュエー タを取り付けている。鑑賞者に反応して、80 個の形状記憶合金アクチュエータ の触手が蠢き、12 枚の花びらが揺らめき、48 個の白色 LED がまたたく。この蠢き、
揺らめき、またたきが Himawari の表情を作り出している。
ここでは、植物の形状や構造をモチーフにしているロボット、キネティックアー ト、おもちゃの関連研究について紹介する。
植物型ロボットに関しては、早稲田大学での研究例 [41] があるが、基礎実験 段階のものである。また、一般的にロボットと言えば人型や動物型を思い浮かべ ることが多く、ロボット研究の分野では植物型のものは少ない。
3.4 作品概要
図
3-3 Himawari
花部分3.5 関連研究
一方、アートの分野では、キネティックアートの中で植物型のものをいくつか 見ることができる。Una Lumino [42](図 3-4)は、植物をモチーフにしたデザ インを行い、ロボット技術と組み合わせることで機械生命体を造り出している。
MSOrgm [43](図 3-5)は、おじぎ草をモチーフにした作品で、有機的な動きを 実現させるために形状記憶合金を利用して動作させている。また、向日葵をモチー フにしているものとしては、太陽光発電をしながら太陽の方へ向きをかえていく Sunflower Robots [44](図 3-6)があるが、Himawari は人の動く方へ花を近づ け、花びらや触手を動かすことで生物の存在感を表現しようとしており、用いら れている技術、デザインコンセプトも異なるものである。
また、おもちゃの分野では、音楽に合わせて踊る FLOWER ROCK 2.0 [45](図 3-7)や、人の会話にうなずくペコッぱ [46](図 3-8)が存在する。
図 3-5 MSOrgm 図 3-4 Una Lumino
図 3-6 Sunflower Robots
これらの事例から、ロボット工学の分野では対象の構造、機能の分析をもとに その模倣を行うことから研究を進めているのに対し、アートやおもちゃの分野で は、より自由な表現を用いて設計が行われていることがわかる。
Himawari は、基本的には動かない植物をモチーフとした植物型ロボットでは あるが、前述の早稲田大学の工学研究のようなロボット開発を目指すのではなく、
アート作品として、より自由な発想のもと、生物の存在感を持つ作品を制作する ことを目指した。Himawari では、この生物の存在感を生み出すために、SMD の触手の蠢きの表現を花部分に取り入れている。花びらに関しても、SMD の形 状記憶合金アクチュエータによって、揺らめく動きを実現させている。
図 3-9 は、植物の向日葵の花の構造を示したものである。キク科の向日葵は頭 状花序という形状を持ち、小さな花が集合して大きなひとつの花を形成している。
花の周囲を舌状花、中央を筒状花で構成される [47]。筒状花は周辺部分から順に 咲くため、開花した筒状花とつぼみの筒状花の 2 つの状態が存在する。そのため、
向日葵の筒状花の状態には様々なものが存在するが、Himawari には筒状花が 2 割程度咲いた状態の向日葵(図 3-9)をモチーフに取り上げている。
3.6 設計
3.6.1 デザインコンセプト
図 3-8
ペコッぱ図 3-7 FLOWER ROCK 2.0
3.6.2 花と茎のデザイン
図 3-10 は、図 3-9 の向日葵の構造を参考にして、赤外線カメラ、白色 LED、
赤外線 LED、形状記憶合金アクチュエータ、造花で構成した Himawari の花部 分である。Himawari では舌状花に造花(12 個)を利用し、造花の裏面に駆動 用の形状記憶合金アクチュエータを配置してゆらめく動作をさせている。筒状花
(つぼみ)部分を、白色 LED(48 個)と赤外線 LED で構成した。筒状花(開花)
部分は、形状記憶合金アクチュエータ(68 個)を配置し、イソギンチャクの触 手のように蠢く動作をさせている。また、花部分をロボットの頭部と考え、花の 中心に赤外線カメラを配置して Himawari の目とした。
図 3-9
向日葵の頭状花序の構造茎部分は鉄柱のトラスで構成し、4 つのサーボモータで駆動した。(図 3-11)
全体のデザインとして花びら以外の装飾を排除し、機械部品、電子部品と赤いケー ブルの持つグロテスク感により生命感を表現した。(図 3-12)
Himawari は、4 つのサーボモータを用いて図 3-13 の駆動軸と駆動範囲で動 作する。花部分中央のカメラに映るの人の動きに反応して、花部分を人が動く 方へゆっくりと近づけていく。人が移動する動きにも反応するが、手を振る動 きのように継続して動くものに反応するように設計している。白色 LED は人 の動きに反応して輝く。触手と花びらも人の動きに反応して蠢き、揺らめく。
Himawari は、このような機械部品と電子部品のみで構成した無機的な構造物に、
触手の蠢きと花びらの揺らめきという有機的な動きを付加することで、人とのイ ンタラクションの中で生物の存在感を生み出している。(図 3-14)
図 3-11
茎部分の裏側図 3-12
花部分の前側3.6.3 インタラクションデザイン
図 3-13
茎の駆動軸と駆動範囲図 3-14 Himawari
と鑑賞者とのインタラクション図 3-15 は、制御システム全体の入力から出力までの概略図である。 花部分 中央の赤外線カメラの入力画像を Cycling '74 Max/MSP/Jitter (Windows) で 開発したプログラムにより解析する。解析したデータをもとに、サーボモータ、
LED、形状記憶合金それぞれのアルゴリズムを用いて制御信号へ変換する。LED と形状記憶合金は、PWM 電圧制御回路で駆動する。サーボモータは吉川工業株 式会社が開発した専用の制御システム(linux)で駆動する。
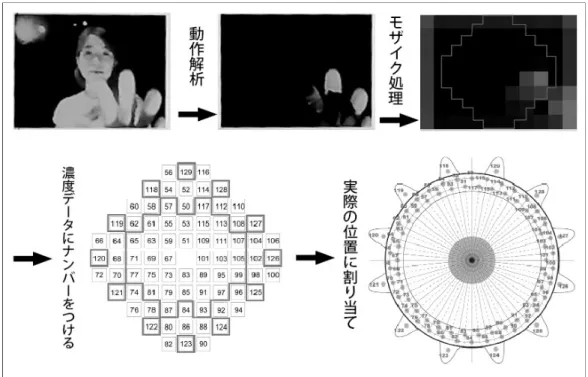
図 3-16 は、赤外線カメラの入力画像から始まる形状記憶合金アクチュエータ の制御の流れである。赤外線カメラの画像を動作解析(フレーム差分)してモ ザイク処理を行う。このモザイク画素の配置を、形状記憶合金アクチュエータ と LED の実際の場所に再配置している。モザイク画素のグレースケール濃度の 数値がノイズ除去のための閾値以上になった場合をトリガーとして、LED と形 状記憶合金の制御信号を発生させている。LED の明るさは、モザイク画素の濃 度値に対応させている。この方法により、鑑賞者が手をかざした付近の触手が蠢
3.7 実装
3.7.1 制御システム
図 3-15
制御システム概略図 3-16
形状記憶合金アクチュエータの制御の流れ3.7.2 形状記憶合金アクチュエータ
いたり、LED が輝くことができる。また、人間の手の動きは不規則であるため、
それに反応した触手や LED も不規則に動作する。この不規則さが、有機的な触 手の蠢きや LED の輝きを生む要因にもなっている。
Himawari の触手や花びらの駆動には、SMD を応用して形状記憶合金アクチュ エータを採用している。形状記憶合金アクチュエータは、小型で近接して配置す ることが可能であり、駆動の際にも音がしない特徴を持つ。
また、Himawari で開発した形状記憶合金アクチュエータに近い動作をするも のにペコッぱ [46] がある。ペコッぱには、バイオメタルファイバー [48] と呼ば れる形状記憶合金素材が用いられているが、その製造のためにはアクチュエータ の素材であるシリコンチューブとバイオメタルファイバーが高価になる。そのた め、Himawari では安価で手に入りやすい形状記憶合金線材を加工して、アクチュ エータを開発している。
今回用いた形状記憶合金線材は、株式会社吉見製作所(http://www.yoshimi- inc.co.jp)が工作用や釣り具用として販売している直径 0.3mm のものである。
形状記憶合金線材は細ければ細いほど、加熱冷却に対する形状変化の応答速度が 早い。直径 0.3mm の形状記憶合金線材は、株式会社吉見製作所で安価に手に入 る最も細いものである。この形状記憶合金線材を、円柱型の鉄柱に巻きつけて曲 線記憶加工処理させた。図 3-17 は、その加工処理の手順を図解したものである。
図 3-17 ②の円柱型の鉄柱の直径を 2cm と 3cm のものを使って曲線記憶加工 処理した2種類の形状記憶合金線材を準備し、図 3-18 のように動作実験を行っ て比較した。
図 3-17
形状記憶合金線材の曲線記憶加工処理の行程図 3-18
曲線記憶加工処理した形状記憶合金線材の動作比較図 3-19
形状記憶合金アクチュエータの構造図 3-19 は、形状記憶合金アクチュエータの構造図である。シリコンチューブ(外 径 2mm、内径 1mm、全長 35mm)の中に、駆動用の曲線記憶形状記憶合金(直 径 0.3mm)、もどりバネ用の超弾性形状記憶合金(直径 0.2mm)、導通用のエナ メル線が入っている。曲線記憶形状記憶合金とエナメル線をつなぎ、電圧をかけ ることで曲線記憶形状記憶合金が駆動する。電圧を加えることで加熱されて曲が り、電圧を止めると自然空冷により冷却されて初期状態の形にもどる。
また、アクチュエータは初期状態で軽くまがった状態となっている。これには、
もどりバネの強さが関係する。もどりバネをより太いものに変更すれば、初期状 態の形をより真っすぐにすることができるが、バネの力が強いために電圧を加え た時の曲線記憶形状記憶合金の曲がり方が弱くなる。さらに、Himawari の花部 分に取り付ける触手としても、少し曲がっていたほうがデザインとして好ましい ことから、もどりバネには直径 0.2mm のものを選択している。
図 3-18 のように、曲線記憶加工処理した形状記憶合金線材は、常温で可能な 限りまっすぐに伸ばしたが、鉄柱の太さが直径 2cm で加工した方が少し曲がっ たままになった。通電加熱した場合は、直径 2cm で加工した方がよく曲がり、
常温初期状態と加熱した状態の形状変化が大きい。この形状変化の大きい方が、
動きの表現力が高いと考え、本研究では直径 2cm で加工したものを選択した。
図 3-20
電圧制御回路の等価回路(1ch
)3.7.3 電圧制御回路
図 3-20 は、Himawari の形状記憶合金アクチュエータと LED に送られる電圧 を制御するための PWM 電圧制御回路の等価回路である。この電圧制御回路は、
PIC(マイクロコントローラ、Microchip Technology Inc.)、フォトカプラ、ト ランジスタ、電解効果トランジスタ等で構成されている。1 つの形状記憶合金ア クチュエータには、3V 最大 0.7A の電流が必要となる。全ての形状記憶合金ア クチュエータと LED のためには、この等価回路が 128ch 分必要になる。また、
効率的な製造を行うために、電圧制御回路の基板はユニバーサル基板を用いた手 配線ではなく、プリント基板設計用 CAD Cadsoft EAGLE を利用して設計、製 造を行った。図 3-21 は、製造した基板と部品を実装した電圧制御装置である。
3.7.2 で開発した形状記憶合金アクチュエータを使って有機的な動きを実現す るために、形状記憶合金アクチュエータに加える駆動電圧とその時間変化を変え て実験を繰り返し、段階的にその特性を絞り込んでいった。
まず、駆動電圧の値を変えて比較実験を行った。駆動電圧に 5V 以上の電圧を 加えた時、形状記憶合金が熱くなりすぎるために、曲がった後の冷却時間は 10 秒以上を要した。駆動電圧に 1.5V の電圧を加えた場合は、形状記憶合金を加熱 するのに時間がかかり、曲がるまでに 30 秒以上を要した。駆動電圧が 3V の場 合は、加熱冷却による形状変化の繰り返しを 10 秒以内で行うことができた。こ れらのことから、駆動電圧を 3V に設定した。
次に、駆動電圧 3V の条件で、加熱時と冷却時の電圧の時間変化に関する実験 を行った。加熱時に瞬時に電圧を加えた場合は、即座に曲がる動作を行ったが、
その動きはガタガタとぎこちなく、有機的な動きには見えなかった。一方、加熱 時に数秒かけて徐々に電圧を加えた場合は、滑らかに曲がる動作を行った。この ことから、滑らかな動作を優先させる場合は、加熱時に徐々に電圧を加える必要 がある。冷却時に徐々に電圧を下げた場合は、滑らかに初期状態にもどる動きを 示したが、電圧を 0 に下げきった後も形状変化を継続し、しばらくして初期状態 にもどった。一方、冷却時に電圧をカットアウトした場合でも、滑らかに形状変 化して初期状態にもどった。つまり、徐々に電圧を下げた場合でも、カットアウ トした場合でも、どちらでも滑らかに動作することが可能であり、カットアウト した場合のほうが、より短い時間で初期状態にもどることができる。
以上の実験結果から、駆動電圧は 3V に設定し、加熱時は徐々に電圧を加えて、
冷却時は電圧をカットアウトする方法を、この形状記憶合金アクチュエータを滑 らかに動作させる制御方法として採用した。
図 3-22 の左のグラフは、この制御方法を表したものである。次に、この制御 方法を元に、加熱時間を変えて実験を行い、揺れ幅と応答時間のバランスのよい 制御方法を絞り込んでいった。
揺れ幅は、加熱時間が長いほど大きくなる。また、加熱時間が長いほど冷却時 間が長くなり、合計した応答時間も長くなる。つまり、揺れ幅が大きいほど応答 時間が長くなる。理想とする形状記憶合金アクチュエータの動きは、揺れ幅が大 きく応答時間が短いものであるが、揺れ幅を大きくすると応答時間が長くなるた め、実験を繰り返して試行錯誤し、動きの変化のわかりやすい最低限の揺れ幅を 約 10mm として、応答時間7秒の動き方を採用した。
3.7.4 形状記憶合金アクチュエータの動きの制御
図 3-23 は、Himawari で最終的に採用した形状記憶合金アクチュエータの電 圧制御のグラフである。形状記憶合金アクチュエータは、電圧を 3 秒かけて上昇 させることで曲がり、電圧をカットアウトした後、4 秒かけて自然空冷により冷 却されて常温初期状態の形にもどる。揺れ幅は約 10mm である。
以上の方法により、滑らかで有機的な形状記憶合金アクチュエータの動きを実 現することができたが、今回の形状記憶合金アクチュエータは曲がってもどるま での応答時間が 7 秒であり、駆動速度は遅いものとなった。この駆動速度の遅さ が原因で、形状記憶合金アクチュエータはシステム上は人の動作に反応してイン タラクティブに制御しているにもかかわらず、実際には常にランダムに蠢いてい るように見える。
図 3-23 Himawari
の形状記憶合金アクチュエータの電圧制御図 3-22
形状記憶合金アクチュエータの形状変化と電圧変化の関係Himawari は、街じゅうアート in 北九州 2008(北九州)、アジアデジタルアー ト大賞展 2008(福岡)、SIGGGRAPH ASIA 2009 Emerging Technologies(横 浜)、ロボスクエア(福岡)、九州大学・芸術工学東京サイト(六本木)で展示を 行い、多くの方から感想を得ることができた。
全体のデザインに対しては、「機械部品や電子部品がむき出しのデザインに美 しさを感じる」との評価を得た。形状記憶合金アクチュエータを利用した触手の 動き、花びらの動きに対しては、「生きているようなリアルな動きに見える」と いう感想を、驚きと高い関心と共に得ることができた。SMD の生み出す触手の 蠢きや花びらの揺らめきが、生物の存在感を生み出していたと言える。
Himawari には、知能と呼べるような高度なプログラムは実装されていない。
手の動きに単純に反応して動くだけのロボットに、このような生命感を感じるの は、触手や花びらの有機的な動きが効果を上げていたと考えられる。
また、SIGGRAPH ASIA 2009 の展示会場では、他にもいくつかのロボットが 展示されていたが、「すべてのロボットの展示の中で Himawari が一番面白い」
との感想を一部の鑑賞者から得た。使われている技術力としては、他の展示物の 方が優れているものが多いと思われる。しかしながら、このような感想が得られ たということは、向日葵というモチーフをデフォルメや演出をしながら作品表 現として帰結させることによって、「機械構造物が動くことの単純な面白さ」を Himawari という作品の中で成立させることができていたと考えられる。
3.8 展示による評価と考察
図 3-24
ロボスクエアでの展示風景一方、インタラクティブアートの作品表現と技術的な課題につながる問題点と して、触手や花びらの動きが人の動きに対してインタラクティブに反応している ように見えなかったことが挙げられる。これには次の2つの要因が考えられる。
1 つ目の要因として、アクチュエータの動きが遅いために人の動きに対しての 即応性がなく、全体としてランダムに動いているように見えることが考えられる。
この問題を解決するには、単純に電圧を加える時間を短くすればよいわけではな い。電圧を加える時間を短くすれば、アクチュエータの曲がり方が弱くなる。電 圧を高くして急激に加熱した場合、短い時間の加熱であっても自然空冷で常温初 期状態にもどる時間が長くなる。今回利用した曲線記憶形状記憶合金はバイオメ タルファイバー(直径 0.05 〜 0.15mm)と比較しても太い線材(0.3mm)であ り、熱しにくく、冷めにくい性質を持つ。アクチュエータの特性実験により絞り 込んだものが図 3-23 の電圧制御のグラフであり、今回開発したアクチュエータ の曲がり具合を優先させた場合の性能の限界である。これらのことから、駆動速 度の問題を解決するためには、駆動源である形状記憶合金の素材から見直す必要 がある。
2 つ目の要因としては、アクチュエータの数が少ないために、アクチュエータ からアクチュエータへの動きの遷移の表現が、人が認識できるほどの解像度に達 していなかったことが考えられる。よりわかりやすい表現を実現するためには、
より多くのアクチュエータを用いて情報提示性能の高い SMD を制作する必要が ある。
本章では、SMD の応用事例として、向日葵をモチーフにした植物型ロボット Himawari について述べた。
SMD の基盤技術である形状記憶合金アクチュエータ、電圧制御回路、プログ ラムを含む制御システムを開発し、吉川工業株式会社の開発したサーボモータ制 御システムと合わせて、植物型ロボット Himawari を制作した。
展示による鑑賞者の評価から、SMD による Himawari の花部分の触手の蠢き と花びらの揺らめきの動きが、鑑賞者とのインタラクションを通して、生物の存 在感を生み出していた言える。また、本研究の目標である「機械構造物が動くこ との単純な面白さ」を作品の中で成立させることができていたと考えられる。
問題点としては、形状記憶合金アクチュエータの性能と数が挙げられる。形状 記憶合金アクチュエータの駆動速度を上げること、蠢きの遷移が認識できるアク チュエータの数を準備することが、インタラクティブに動作していることを表現 するためには必要な条件である。これらの条件をクリアすれば、よりわかりやす い表現の提示が可能になると考える。
生物をモチーフとした動きのあるロボットや実体ディスプレイを制作する場 合、その生態や形態を忠実に再現するロボット工学的な開発方法や人工知能のよ うな高度なアルゴリズムを利用しなくても、SMD のように触手の蠢きや花びら の揺らめきというインタラクティブな表層の動きによって生物の存在感を表現す ることが可能であると考えられる。
3.9 まとめ
本章では、SMD の応用事例であるインタラクティブアート作品「plant」(映 像参照 URL [V2])について述べる。plant は、169 個の造葉を取り付けた形状 記憶合金アクチュエータを用いて、葉群のざわめきを表現するアート作品である。
この plant の制作、展示を通して、SMD の「葉群のざわめき」の表現の可能性 について考察する。
plant は、草が風に揺れるように、葉を動かして人とコミュニケーションを行 う作品である。人が手をかざすと、そこに風が存在するかのように葉がざわめい ていく。また、手の動きにあわせて変化する音響効果と、スポットライトによる 照明効果によってインスタレーションを演出している。真っ暗な空間にぼんやり と浮かび上がった葉群のかすかな動きと音の変化が、幻想的な空間を創り出し、
鑑賞者は心地よいインタラクションを感じることができる。
第 4 章 plant : 葉群がざわめくインタラクティブアート作品
4.1 はじめに
4.2 作品概要
ここでは、plant の特徴である葉群がざわめく実体ディスプレイの関連研究に ついて述べる。
1 つ目は、第 2 章 5 節 SMD の関連研究でも取り上げた Super Cilia Skin [2]
である。前述したように Super Cilia Skin は、そのコンセプトは SMD に非常に 近いものだが、プロトタイプで採用されている技術はぎこちなくカタカタ揺れる ものである。plant のように、構成要素のアクチュエータが滑らかに曲がる動き の集合によって葉群がざわめく表現が実現できるシステムとは言えない。
2 つ目は、図 4-2 の tele-present wind [49] である。屋外にあるドライフラワー
(送信側)から得た揺れ方に関する情報を、遠く離れた屋内の展示場所にあるド ライフラワー(受信側)にサーボモータを使って伝達することで、遠隔地の風の 情報を視覚化した作品である。この tele-present wind は、受信側のドライフラ ワーは複数設置しているが、送信側のドライフラワーは 1 つであり、受信側のド ライフラワーは全て同じ動作をしている。これは、複数の構成要素を独立して制 御することでざわめく表現を行う plant とは異なるものである。
plant の展示方法は、装置自体の展示だけでなく、暗い空間に浮かび上がる植 物というコンセプトを表現するために、展示空間の演出も含むインスタレーショ ン形式をとっている。図 4-3 のように、3m×3m の空間の中央に丸テーブルを配 置し、その上に葉群を配置している。周囲 360 度から複数人で体験できるイン スタレーションにするために、葉群をドーム形状、テーブルを円形状に設計した。
4.4 設計
4.4.1 インスタレーションの設計
図 4-2 tele-present wind
(送信側 : 左,
受信側 : 右)4.3 関連研究
テーブル上方に、赤外線カメラとスポットライトを配置している。スポットライ トは特殊なレンズを利用して葉群部分のみを照らし、テーブルを黒色にすること で、葉群のみが浮かび上がって見える演出を行っている。テーブル内に形状記憶 合金アクチュエータを制御する電圧制御装置を配置(図 4-4)し、その他の制御 システム(制御用 PC、音響エフェクター、音響アンプ)は、インスタレーショ ンの外に設置している。
図 4-3 展示の設計
plant の葉には、シュガーバインの造葉を利用している。シュガーバインの葉は、
5 枚の小さい葉で構成された花のようにも見える掌状複葉 [50] の形状を持つ。(図 4-5 下) plant では、形状記憶合金アクチュエータの先端にこの造葉を取り付け、
169 個のアクチュエータを直径 24cm のドーム状の土台に同心円状に広がるよう に配置した。
図 4-5 葉群のデザイン
4.4.2 葉群のデザイン
plant は、葉群上方にある赤外線カメラをセンサーとして、鑑賞者の手の動き に反応して個々の葉を揺らす。揺れ幅は約 5mm で、葉の茎にあたる形状記憶合 金アクチュエータが一方向に曲がってもどる動作を行う。曲がる方向は葉群の中 心の葉を除いて、中心から外側に向かって曲がる。(図 4-5 上) また、 鑑賞者が 手を動かした状態から手を離す、もしくは手の動きを止めた後の 5 秒間は、揺れ て戻る動作を繰り返す。これは、手の下にある葉の動きが鑑賞者自身から見えに くいため、遅延して葉を動かすことによって鑑賞者自身に葉の動きを見ることが できるようにするためである。動く葉の位置と鑑賞者の手の動く位置を一致させ ているので、鑑賞者は自分の手の動きに反応して葉が動いているような感覚を体 験する。音に関しては、ループ音源ファイルを再生しながら、手の動きの変化量 の増減に合わせて音色が変化する音響効果を加えている。
図 4-7 は、制御システム全体の入力から出力までの概略図である。 赤外線カ メラからの入力画像を Cycling '74 Max/MSP/Jitter (Windows) で開発したプロ グラムにより動作解析(フレーム差分)を行う。その解析データをもとに、形状 記憶合金用の制御アルゴリズムにより制御信号(DMX 信号)へ変換し、電圧制 御回路により形状記憶合金アクチュエータを駆動している。音に関しては、制御 パソコン上で再生したループ音源を KORG KAOSS PAD KP3 へ入力する。赤外 線カメラの入力画像の動作解析結果から動作変化量を算出し、 その動作変化量の 値によって、KORG KAOSS PAD KP3 の音響効果を変化させている。
4.5 実装
4.5.1 制御システム
4.4.3 インタラクションデザイン
図 4-6 plant
と鑑賞者のインタラクション図 4-8 は、赤外線カメラの入力画像から始まる形状記憶合金アクチュエータの 制御の流れを表したものである。赤外線カメラの入力画像をもとに動作解析、モ ザイク処理を行う。モザイク画素の配置を、形状記憶合金アクチュエータの実際 の場所に再配置している。このモザイク画素のグレースケール濃度の数値がノイ ズ除去のための閾値以上になった場合をトリガーとして、形状記憶合金アクチュ エータの制御信号を発生させている。この方法により、鑑賞者が手をかざした付 近の葉が動作し、手を動かすことで葉のざわめきが遷移していく。
図 4-7 制御システム概略
図 4-8 形状記憶合金アクチュエータの制御の流れ
図 4-9 は、plant のために開発した形状記憶合金アクチュエータの構造図であ る。Himawari ではシリコンチューブを利用していたが、plant ではデザイン上 の理由からシリコンチューブを使わず、形状記憶合金等が剥き出しの状態のアク チュエータを開発した。
駆動源となる形状記憶合金は、Himawari で利用したものと同じ曲線記憶加工 処理させた形状記憶合金線材を利用しているが、長さは Himawari の 35mm に 対して、plant ではデザイン上の理由で 40mm としている。この曲線記憶形状記 憶合金ともどりバネ用の超弾性形状記憶合金を導通用の2つをエナメル線で螺旋 状に巻いている。もどりバネの超弾性形状記憶合金は、Himawari の直径 0.2mm のものに対して、plant では直径 0.4mm の太いものを利用している。この理由は、
第4章5節 4 項の形状記憶合金アクチュエータの動きの制御で述べる。曲線記憶 形状記憶合金とエナメル線は、小型の電子ハトメを利用して接続し、電圧を加え ることで曲線記憶形状記憶合金が加熱されて駆動する。
Himawari のアクチュエータと同様に、機構を単純にすることでシンプルなデ ザインを実現するのと同時に、素材費や加工費を抑えて安価なアクチュエータを 開発している。
図 4-9 形状記憶合金アクチュエータの構造
4.5.2 形状記憶合金アクチュエータ
図 4-11 は、形状記憶合金アクチュエータの電圧を制御するための PWM 電圧 制御回路の等価回路である。電圧制御回路は PIC、フォトカプラ、トランジスタ、
電解効果トランジスタ等で構成されている。1 つの形状記憶合金アクチュエータ の駆動には 3V 最大 0.7A の電流が必要である。plant の全ての形状記憶合金ア クチュエータの制御には、この等価回路が 169ch 分必要になる。この等価回路 は Himawari と同じものであり、作品で使用した電圧制御装置も Himawari と 同じものを用いている。
4.5.3 電圧制御回路
図 4-10 169
個のアクチュエータを取り付けたドーム形状土台図 4-10 は、ドーム状の土台に 169 個の形状記憶合金アクチュエータを配置し た様子である。
図 4-12 の加熱時間を変えて実験を行い、最終的に図 4-13 のように、加熱時 間2秒、冷却時間3秒、揺れ幅が約 5mm の動き方を採用した。Himawari では 加熱時間 3 秒、冷却時間4秒としていたが、plant ではそれぞれ 1 秒ずつ短くなっ ている。揺れ幅も Himawari の約 10mm から plant では約 5mm と小さくなっ ている。この理由は、plant の先端に取り付けている葉の大きさとアクチュエー 図 4-12 は、plant の形状記憶合金アクチュエータの形状変化と電圧変化の関 係を表したものである。plant の形状記憶合金アクチュエータは、Himawari の 形状記憶合金アクチュエータとはデザインや用いられている材料が一部異なる が、駆動源となる形状記憶合金は Himawari と同じ独自加工した曲線記憶形状記 憶合金であり、基本特性は同じものである。plant の形状記憶合金アクチュエー タは、Himawari と同様に徐々に電圧を加熱させて曲がり、電圧をカットアウト することで冷却されて初期状態にもどる。
また、Himawari の形状記憶合金アクチュエータが、常温初期状態で少し曲がっ ていたのに対して、plant ではもどりバネに太い弾性の強いものを用いることで、
初期状態を真っすぐに直立させている。この理由は、Himawari と同じように初 期状態が少し曲がったままだと、アクチュエータの先に取り付けた葉が斜めに沈 み込むような動きになるため、初期状態を直立にすることで、アクチュエータが 曲がった時に可能な限り葉が横に揺れて動くように見せるためである。

は、建築における新しいデザインコンセプトである Hypersurface Architecture [28]の事例である。前述の研究事例 Recompose と似て壁面の凹凸を制御するもの であり、文字、ロゴの表示やインタラクティブに動作することも可能である。Flare Facade [29](図 1-14)は、ファサード(建物表層)の構成](https://thumb-ap.123doks.com/thumbv2/123deta/9885032.1907658/12.892.170.767.334.554/についておけるデザインコンセプトインタラクティブファサード.webp)