- 1 - 目次 1 第 1 章 序論 3 1.1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 1.2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 第 2 章 自動車振動解析 5 2.1 自動車振動計測・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5 2.2 実走行試験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 8 第 3 章 多モード振動発電デバイスの評価実験 11 3.1 多モード振動発電デバイス ・・・・・・・・・・・・・・・・・・・・・・・ 11 3.1.1 多モード振動発電デバイス概要・・・・・・・・・・・・・・・・・・・ 11 3.1.2 多モード振動発電デバイスの試作と応力解析・・・・・・・・・・・・・ 14 3.1.3 バイモルフ圧電素子の仕様・・・・・・・・・・・・・・・・・・・・・ 16 3.2 多モード振動発電デバイスのシステム同定・・・・・・・・・・・・・・・・・ 18 3.2.1 多モード振動発電デバイスの加速度に対するシステム同定・・・・・・・ 18 3.2.2 加速度と PZT 出力電圧の周波数特性・・・・・・・・・・・・・・・・・ 26 3.3 偏芯構造モデルの同定実験・・・・・・・・・・・・・・・・・・・・・・・・・ 27 3.3.1 偏芯モデル実験条件・・・・・・・・・・・・・・・・・・・・・・・・・ 27 3.3.2 偏芯モデルのシステム同定・・・・・・・・・・・・・・・・・・・・・ 29 3.3.3 偏芯モデルのねじれ振動特性・・・・・・・・・・・・・・・・・・・・31 3.4 偏芯真鍮モデルの同定実験・・・・・・・・・・・・・・・・・・・・・・・・・ 34 3.4.1 偏芯真鍮モデルの概要・・・・・・・・・・・・・・・・・・・・・・・34 3.4.2 偏芯真鍮モデルの同定実験・・・・・・・・・・・・・・・・・・・・・35 3.4.3 Z 軸加振・・・・・・・・・・・・・・・・・・・・・・・・・・・・・38 3.4.4 Y 軸加振・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 3.4.5 X 軸加振・・・・・・・・・・・・・・・・・・・・・・・・・・・・・40 3.5 3 章まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・41 第 4 章 多モードデバイスの強制加振実験 42 4.1 多モード振動発電デバイスのエネルギー評価・・・・・・・・・・・・・・・・42 4.2 多モードデバイスと一質点デバイスとの出力比較・・・・・・・・・・・・・・47 4.2.1 一質点デバイスに対するシステム同定・・・・・・・・・・・・・・・・・ 47 4.2.2 多モードデバイス(質点近似モデル)に対するシステム同定・・・・・・・・ 50 4.2.3 両デバイスに対する強制加振実験・・・・・・・・・・・・・・・・・・ 51 4.3 多モードデバイスの振動特性解析・・・・・・・・・・・・・・・・・・・・・ 56
- 2 - 4.3.1 理論モード解析・・・・・・・・・・・・・・・・・・・・・・・・・・・ 56 4.3.2 Solidworks による解析・・・・・・・・・・・・・・・・・・・・・・・・ 59 第 5 章 まとめ 60 参考文献 61 発表論文 63
- 3 -
第 1 章 序論
1.1. 背景
地球温暖化に伴う国家戦略として、低炭素化社会づくりという背景から、温室効果ガス (CO2)排出削減などによる、先端的低炭素化技術開発が急務とされている。実際に、地球温 暖化の防止対策として、先進諸国 50%を上回る CO2削減目標を掲げており、日本全体では 2050 年までに CO2排出の 60~80%削減を目指している。 また、まだ記憶に新しい 2011 年 3 月 11 日の東日本大震災での福島第一原子力発電所の事 故以降、発電技術のあり方や、電力の供給方法に注目が集まっている。環境に優しく、安 全なだけではなく、自身などの災害や、資源の有無によって左右されない発電技術の発達 は不可欠である。その中で、注目されているのがエネルギーハーベスティング技術(環境発 電)[1],[2]である。光、熱、振動、電波など、普段は意識されず使用されない、もしくは捨て られているエネルギーを回収して、電気エネルギーに変換する技術である。太陽光発電、 風力発電は実用化が進んでいる。一方、少ない発電量、効率的発電可能周波数の狭さに起 因して、振動発電[3],[4]に関しては、社会実験などによる試験的な試みとして一部利用され てきている程度である。特に振動源を多く有する自動車分野では、その実用化例は極めて 少ない。 自動車分野は、振動エネルギーが豊富であり、CO2の排出が多いことから低炭素化効果が 大きく、振動発電導入による効果が期待できる。近年では、LED やモータ、ワイヤレス通 信機器などにも低消費電力機器が導入されてきている。エネルギーハーベスティング技術 の最大の特長は、電源に関する問題を解決できることである。適用可能なアプリケーショ ンは非常に広いが、バッテリーレス、ワイヤレスで適用しやすいことから、とりわけ無線 機器との相性が良い。このことから、自動車と振動発電は非常にマッチしているが、振動 発電装置の実用化例は極めて少ないのが実情である。振動発電低消費電力デバイスに対す るセルフパワード技術、すなわちバッテリーによる電源供給ではなく、ハーネス不要で分 散した発電・供給技術の要求も強く、振動発電デバイスによるエネルギー回生技術が望ま れる。 このように、エネルギーハーベスティング技術として、ひとつの電力源となり得るデバ イスの開発の要求は高く、導入対象とする自動車分野でも、無駄に消費されているエネル ギーを、付加価値として導入できることは、大きなメリットとなり得る。しかし、出力電 力の小ささが問題となることから、構造や振動の解析による改善が実用化の鍵となる。- 4 -
1.2 目的
本研究では、自動車振動のエネルギーを回生するデバイスの開発を目的とする。自動車 には多くの振動を存在しているが、ゴムやショックアブソーバーなどで振動を吸収してし まい、熱エネルギーとして、無駄に散逸されている。また、新興国向けの低価格自動車や、 日本でも普及の兆しを見せている小型電気自動車は、一般の自動車と比較し構造上発生す る振動が非常に大きい。この振動のエネルギーを回生することで、消費されるエネルギー を活用できる形として取り出す。本研究では、自動車に後付けで導入できる、構造体を目 的とするため、発電素子としてはピエゾ式の素子を用いる。ピエゾ素子を用いるメリット として、構造がシンプルであること、質量が軽量であること、大量生産によって安価で入 手できる点が挙げられる。 圧電素子を用いた振動発電全般の課題として、まず効率的に発電するための周波数帯域 が狭く、素子形状が限定されてしまうことが挙げられる。これに対しては、発電装置の振 動伝達構造を、広い周波数帯域において、大きさや軸の異なる振動を制御できるものにす る必要がある。次の課題として、発電能力が低いためコストを上回る発電量が得られない ことが挙げられる。現状の発電デバイスの出力は 5 m W 程度であり、エネルギー回生を行 うためには出力レベルの向上、そして恒久的な発電性能を持たせることが必要となる。ま た、圧電素子は脆性材料のため、耐久性が低いという点も課題となってくる。振動源とな る自動車の発生させる熱、振動の振幅などを考慮し、圧電対の性質と発電装置の構造をマ ッチさせる必要がある。それらを、解決していくことが、本研究の目的である。以上の点 を考慮し、効率良く振動を回生できるデバイスを考案して、評価していく。 本論文では、自動車振動の振動解析を行い、その結果から自動車振動に適応した振動発 電デバイスの構造を考案する。また、デバイスの発電能力評価を行い、より PZT の出力が 向上する設計を模索することを目的とする。 本論文の構成は以下のようになる。 2 章で、自動車振動の振動実験及びその振動解析結果を述べ、3 章で、本研究で提案する 多モード振動発電デバイスの概要及び、同定実験を行いデバイス単体の特性を示す。4 章で は PZT を貼り付けた多モードデバイスに対し強制加振実験を行い発電能力の評価、より発 電量が大きくなるための条件検証を行う。 以上から、最適な発電構造と、振動条件を検討し、5 章で本論文のまとめを述べる。- 5 -
第 2 章 自動車振動解析
最初に、実走行試験により自動車の振動を計測し、共振周波数の解析を行なった。本章 では、発電デバイスを試作するにあたって、有効な振動特性を解析する。2.1 自動車振動計測
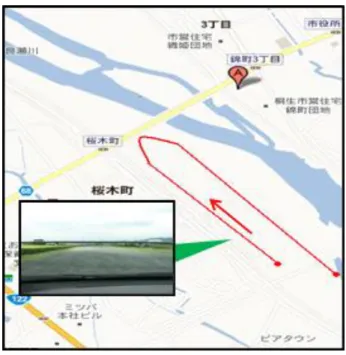
自動車振動に特化した多モード振動発電デバイスを試作するにあたり,まず自動車振動 の特徴を捉える。本実験では、実走行試験による自動車振動解析を行った。事前解析によ り設置推奨箇所となった自動車の部分に加速度センサを張り付け、センサからの出力デー タを取得し、解析を行う。計測条件として、計測時間 100s、サンプリング時間 1ms とし加 速度センサからの出力信号を取得した。各種条件を、表 2.1 に示す。走行路としては、アッ プダウンの多い道であるワインディングロード、舗装の済んでない砂利道である未舗装路、 フラットだが信号のストップ&ゴーの多い道である市街地の 3 コースとする。図 2.1、図 2.2、図 2.3 に走行コースを示す。 表 2.1 自動車実走行試験に対する試験条件 計測器 オシロスコープ(帯域 200 [MHz]) 計測時間 100 [s] サンプリング時間 1 [ms] センサ 加速度センサ(3 軸) 計測信号 加速度[G/V] 計測方向 鉛直、前後方向 センサ帯域 DC ~100[Hz] データ数 100k[point] 計測回数 各ルートで 2 回- 6 -
図 2.1 ワインディングロードコース 図 2.2 市街地走行コース
- 7 -
走行路での比較の他、計測軸方向による比較も行う。自動車での振動で最も大きく発生 していると考えられる上下方向(鉛直)、次いで大きいと考えられる前後方向の加速度を計測 できるように、加速度センサを設置した。加速度センサ設置の図を図 2.4 に示す。
- 8 -
2.2 実走行試験結果
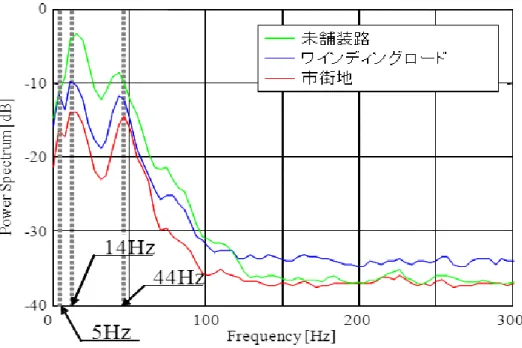
走行試験の解析結果を述べる。自動車振動の特徴を解析し、デバイスの開発において有 効となるようなデータを導出する。 図2.5 に加速度センサをボンネット上に設置し計測した加速度から求めた、自動車の加速 度振動に対するパワースペクトル密度の一例を示す。 パワースペクトル密度とは,定常過程に関する周波数値の正実数の関数または時間に関 する決定的な関数である。信号や時系列の力が周波数についてどのように分布しているか を示す。ここでいう力とは具体的な物理的力であり,抽象的な信号についてもそれを電圧 の波形と見て,1Ω の負荷にそれをかけたときの電力として信号の二乗の値と定義される。 このとき,ある一瞬の力は次のように与えられる。 𝑃 = 𝑠(𝑡)2・・・(2.1) 力の平均が 0 でない信号は二乗可積分ではないので,この場合のフーリエ変換は存在し ない。この信号が定常過程として扱える場合,パワースペクトル密度は信号の自己相関 R(τ) のフーリエ変換となる。これより次の方程式が得られる。 S(f)=∫ 𝑅(τ)𝑒−∞∞ −2𝜋𝑖𝑓𝜏𝑑𝜏・・・(2.2) ある周波数帯域における信号の力は,正の周波数と負の周波数について積分することで計 算できる。 P=∫ 𝑆(𝑓)𝑑𝑓 + ∫−𝐹2𝑆(𝑓)𝑑𝑓 −𝐹1 𝐹2 𝐹1 ・・・(2.3) 信号のパワースペクトル密度は,その信号が広義の定常過程であるときだけ存在する。信 号が定常的でない場合,その自己相関関数は 2 つの変数の関数となるため,パワースペク トル密度は存在しないが,似たような技法で時とともに変化するスペクトル密度の近似を 求めることができる。 同図から自動車振動の特徴として確認できることは,(1)5[Hz],14[Hz],44[Hz]と複数(多 モード)の共振周波数が出現すること,(2)その共振周波数が加速度センサの設置場所に強 く依存すること,(3)その共振周波数が未舗装路,ワインディングロード,市街地と条件の 異なる走行路の状態に大きく依存していないことである。- 9 -
- 10 - 次に、計測軸による振動比較を行う。軽自動車のボンネット中央での鉛直方向と水平方 向の加速度に対するパワースペクトルを図 2.6 に示す。図より、ほぼ全域にわたって鉛直方 向のスペクトルが大きいことがわかる。また、振動モードが複数現れるが、その周波数は 水平方向と鉛直方向で変化しないことも確認できる。よって、計測軸方向による違いは、 周波数に関係なく、スペクトルの大きさのみである。 図2.6 軽自動車ボンネット中央でのパワースペクトル (上)鉛直、(下)水平
- 11 -
第 3 章 多モードデバイスの評価実験
3.1 多モード振動発電デバイス
3.1.1 多モード振動発電デバイス概要 2 章の結果より、自動車振動を対象とする振動発電装置では、従来型の 1 質点の圧電素子 (PZT)を用いた振動発電デバイスでは多モードにて効率的に発電することはできず,自動車 振動に特化させることはできない。そこで、本章では複数の周波数、すなわち多モード振 動に対応できる構造を提案する。多モード振動発電デバイスの幾何学的構造を図 3.1 に示 す。複数のばね・質量・ダンパ要素により構成される。このばね・ダンパ部のはり(板) に圧電デバイスを固着させ(または板そのものを圧電デバイスで構成し)、振動発電を行う。 この構造の等価構造を図 3.2 に示すが、このような構造で実現することも可能である。この 構造は複数の板ばねと質量により構成される。図 3.1 ではマスとバネがそれぞれ 3 対の構成 により実現されているため、図 3.3 で示されるように、3 次の振動モードまで対応できる。 このときの固有周波数は、質量、ばね定数、粘性定数と言った構造物の各パラメータによ り決定するので、パラメータ設定により、発電デバイスの固有周波数を任意に設定できる。 この板ばねに圧電素子(PZT)を貼り付け、印加される応力から多モード振動発電を行う。 図 3.1 提案する多モード振動発電装置 図 3.2 (等価)質点近似モデルbas
e
c
1
,k
1
c
2
,k
2
c
3
,k
3
m
1
m
2
m
3
x
1x
3x
2PZT
bas
e
c
1
,k
1
c
2
,k
2
c
3
,k
3
m
1
m
2
m
3
x
1x
3x
2PZT
basem
1m
2m
3c
1,k
1c
2,k
2c
3,k
3 x1 x2 x3 basem
1m
2m
3c
1,k
1c
2,k
2c
3,k
3 x1 x2 x3- 12 -
- 13 -
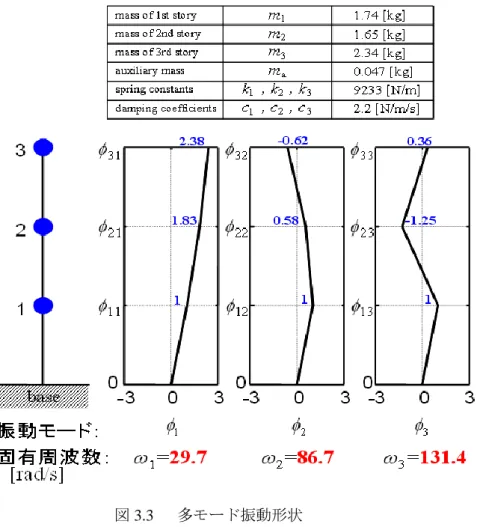
また、図 3.4 の 3 質点型の質点近似モデルの各パラメータを m1 = 1.74[kg]、m2 = 1.65[kg]、
m3 = 2.34[kg]、k1 = k2 = k3 = 9233[N/m]、c1 = c2 = c3 = 2.2[N/m/s]としたときの周波数特性を図
3.5 に示す。ugはベース加速度、u1は 1 層加速度、u2は 2 層加速度、 u3は 3 層加速度であ
る。同図より共振周波数が 3 次モードまで出現していること、また 1 層、2 層、3 層と共振 周波数が 29.7[Hz]、86.7[Hz]、131.4[Hz]のそれぞれに一致していることが確認でき、各周波 数での入力振動に対する振動増幅率も定量的に解析できる。すなわち、質量と板ばねの弾 性係数を適切に調整し、前節で同定した複数の振動周波数に一致させることにより、一つ の発電デバイスにより複数の振動モードで同時にかつ効率的にエネルギー回生を行うこと が出来る。このように、対象の固有周波数が与えられれば、計算により装置のばね・質量・ ダンパの各パラメータが導出でき、容易に設計・製作できることも提案装置の特長である。 図 3.4 多モード発電デバイスの周波数特性
G
a
in
[
d
B
]
Frequency [ra d/s]
10
010
110
210
3:
u
3/
u
&&
g:
u u
1/
&&
g:
u
2/
u
&&
g0
-20
-40
-60
-80
40
20
G
a
in
[
d
B
]
Frequency [ra d/s]
10
010
110
210
3:
u
3/
u
&&
g:
u u
1/
&&
g:
u
2/
u
&&
g0
-20
-40
-60
-80
40
20
- 14 - 3.1.2 多モード振動発電デバイスの試作と応力解析 ここでは、2 つの振動周波数を対象とし、2 対の質量と板ばねによりデバイスの試作を行 うとともに、3 次元振動解析用 CAD である CATIA により固有値と応力解析を行った。ま ず、多モード発電デバイスの幾何学的構造は図 3.5 のように決定した。自動車振動の共振周 波数とデバイスの共振が一致するように以下の(1)~(4)の計算式により、各パラメータを設 定する。構造体の共振周波数はデバイスのばね定数、粘性定数、質量によって決定する。 また、ばね定数は板ばねの長さ、幅、厚さ、ヤング率によって決定する。試作した多モー ド振動発電デバイスを図 3.5 に、そのパラメータを表 3.1 に示す。
𝑘
1= 𝑘
2=
𝑏ℎ
3𝐸
4𝑙
3𝜔
12・
𝜔
22=
𝑘
1𝑘
2𝑚
1𝑚
2𝜔
12+ 𝜔
22=
3𝑘
1𝑚
1𝑚
1𝑚
2𝑓
1=
𝜔1 2𝜋,
𝑓
2=
𝜔2 2𝜋 図 3.5 試作した多モード振動発電デバイス- 15 - 表 3.1 多モード振動発電デバイスのパラメータ 素材 アルミニウム 板バネの長さ l = 0.04 [m] 板バネの幅 b = 0.02 [m] 板バネの厚さ h = 0.0007 [m] 重りの重さ m1= m2= 38 × 10−3 [kg] 設計したパラメータを基に、CATIA 解析によりえられた 2 つの振動モード形状とその応 力分布図を図 3.6 に示す。図の左端を拘束面としている。本解析結果より、1 次モードでは 右側の板ばねの拘束面よりで強い応力が発生し、また 2 次モードでは左板ばねの上部に強 い応力が発生することがわかる。これは片持ちばりのモーメントが支点付近で最大となる ことを示しており、このような場所に PZT を設置すれば効率的発電が可能であると考えら れる。 図 3.6 多モード対応発電デバイスの構造と振動に対する応力分布
- 16 - 3.1.3 バイモルフ圧電素子の仕様 本研究にて使用したバイモルフ圧電素子の寸法と仕様を図 3.7 と表 2 に示す。バイモルフ 圧電素子とは 2 枚の圧電素子を貼りあわせた構造である。比較的大きめの変位を得る場合 に用いられる。2 枚の圧電素子のそれぞれに差動的な電圧を加えると伸縮方向が反対になる ため反りが発生する。片持ち梁構造にすると先端が変位することを利用して位置決め素子 として使用できる。 図 3.7 バイモルフ圧電素子の寸法 表 3.2 バイモルフ圧電素子の仕様
LPD3713X
変位量
150
m at 70V
静電容量
450 nF
20%
誘電損失(tan
)
3.0%
絶縁抵抗
100MΩ
形状
3.7
1.34
0.6 mm
- 17 - また、本研究に関わる圧電素子の性質について述べる。 圧電体と電歪体の関係 電歪体とは、広義には、結晶に電界を印加した際、電界の二乗に比例した形の歪を示す 物質のことを言う。基本的には、常誘電体でも電界を印加すると、ごくわずかではあるが 電歪効果を示す。しかしリラクサ型誘電体では特に大きな電歪を示すことが知られている。 電歪については、最大誘電率温度付近で電歪も異常に大きくなる。電歪体は圧電体におい て必要とされる分極処理捜査が不要、電界の極性を問わない(歪の形が左右対称)、歪のヒス テリシスがほとんどない等の特徴がある。 PZT のキュリー温度は通常 350 度程度である。よって室温付近では、比誘電率が数百と 小さく、圧倒的に圧電効果作用が大きいことから圧電セラミックスとして利用されている。 一方、電歪体は基本的には常誘電体でも比誘電率が大きければいいので、PZT を含めた 強誘電体なら比誘電率が最も大きくなる温度付近で仕様すると、電歪材料として使用でき なくなる。ということは室温付近にキュリー温度があり、比誘電率がとても大きく、電界 誘起歪が大きければ電歪材料として使用できる。 キュリー温度 キュリー温度とは、圧電体の分野において、分極が消失する臨界温度のことをいう。実用 的な圧電セラミックスとしての観点からは、圧電セラミックスの使用温度範囲内にキュリ ー点がいくつもある材料は、相転移によって圧電特性が変化するために使用されない。こ れにより、エンジンなど高温となる箇所には、PZT が設置できず、設置可能箇所が限定さ れることとなる。
- 18 -
3.2 多モード振動発電デバイスのシステム同定
3.2.1 多モード振動発電デバイスの加速度に対するシステム同定 本節では、試作した 2 質点型の多モード振動発電デバイスの特性を確認するために実験 を行った。システム同定実験と正弦波掃引方による PZT の発電電圧に対する同定実験の詳 細と結果の比較について以下で示す。図 3.8 に実験構成写真を示す。 図 3.8 加振実験の実験構成写真- 19 - 実験方法 拘束面ならびに各質点に加速度センサを配置し、加振機に電圧を印加しデバイスを鉛直 方向に加振させ、振動計測を行った。拘束面の加速度、および各質点の加速度を加速度セ ンサにより測定する。ここでは、入力信号を拘束面の加速度信号 ug[G]、出力信号を各質点 の加速度 u1[G]、u2[G]としてシステム同定法により周波数特性を同定する。システム同定実 験の構成を図 3.9 に示す。また、使用した加速度センサを図 3.10 と図 3.11、その仕様を表 3.3 にそれぞれ示す。加速度センサの仕様は以下のとおりである。 図 3.9 システム同定実験の実験構成
- 20 - 表 3.3 加速度センサの仕様 拘束面の加速度センサ 各質点の加速度センサ 検出軸 3 軸 3 軸 検出範囲 ± 2 [G] ± 2 [G] 感度 0.1 [V/G] 1 [V/G] 検出周波数 DC~1500 [Hz] DC ~ 80 [Hz] (z 軸のみ ~20[Hz]) 電源電圧 12 [V] 5 [V] 質量 40 [g] 3 [g] 図 3.10 拘束面の加速度センサ 図 3.11 各質点の加速度センサ
- 21 - システム同定法によるモデル化 多モード振動発電デバイスの数式モデルを求めるためにシステム同定を行い、モデル を導出する。システム同定法は実システムに対する実験によって取得された入力データ に基づいて与えられたモデルの集合から実システムを最も近似するモデルを求める方法 である。以下がシステム同定の手順となる。 [1]入出力データの取得、処理 [2]データに基づき離散モデルを作成 [3]モデルから制御対象のゲイン、極、零点を導出 [4]モデルの妥当性の評価 システム同定法は実システムに対する実験によって取得された入力データに基づいて 与えられたモデルの集合から実システムを最も近似するモデルを求める方法である。 またシステム同定を行う際、ARX モデルを用いた。以下にその説明を記述する。 ARX モデル 差分方程式 ) ( ) ( ) 1 ( ) ( ) 1 ( ) (k a1y k a y k n b1u k b u k n wk y n a n b b a ・・・ ・・・ ・・・・(3.1) を考える。 このときモデルを記述するパラメータから構成されるベクトルを T n na b ba a a , , , , , ] [ 1 1 ・・・・・・・・・・・・・・・・・・・・・・(3.2) 入力データのベクトルを T b a uk uk n n k y k y k) [ ( 1),..., ( ), ( 1),..., ( )] ( ・・・・・・・・・・・・・(3.3) と定義したとき、出力が ) ( ) ( ) (k k k y T ・・・・・・・・・・・・・・・・・・・・・・・・・・(3.4) と表せるモデルである。
- 22 - ここで 2 つの多項式 A(p)=1+a1p -1+・・・+𝑎 𝑛𝑎𝑝−𝑛𝑎𝐵(𝑝) =b1p -1+・・・+𝑏 𝑛𝑏𝑝−𝑛𝑏 を導入する。ただし A(p)と B(p)は既約なシフトオペレータ p の多項式である。 すると(3.1)式は A(p)y(k)=B(p)u(k)+w(k) と書き直される。このように記述されるモデルを、ARX(Auto-Regressive eXogeneous)モデ ルといい、これはシステム同定においてしばしば利用される重要なモデルである。また、 ARX モデルは後述する最小二乗法にとって都合のよいモデルであるため、最小二乗モデ ルと呼ばれることもある。 ARX モデルの一段先予測値の説明をする。 まず、離散時間 LTI システムの一般的な表現は次のようになる。 y(k)=G(p)u(k)+H(p)w(k)・・・・・・・・・・・・・・・(3.5) ここで、離散時間 LTI モデルにおける一段先予測誤差の定理を示す。 (3.5)式で定義した離散時間 LTI モデルにおいて、時刻(k-1)までに測定された入出 力データに基づいた出力 y(k)の一段先予測値𝑦̂(𝑘|𝜃)は 𝑦̂(𝑘|𝜃) = [1 − 𝐻−1(𝑝、𝜃)]𝑦(𝑘) + 𝐻−1(𝑝、𝜃)𝐺(𝑝、𝜃)𝑢(𝑘) で与えられる。ただし、𝜃はモデルを記述するパラメータより構成されるベクトル である。このことから、ARX モデルの一段先予測値は 𝑦̂(𝑘|𝜃) = 𝐵(𝑝)𝑢(𝑘) + [1 − 𝐴(𝑝)]𝑦(𝑘) = 𝜃𝑇𝜑(𝑘) となる。ARX モデルは一段先予測値が𝜃に関して線形な関係式で記述できる。こ のため、ARX モデルは線形回帰モデルとも呼ばれる。
- 23 - システム同定法 モデルのベクトルθ を求めるにあたって用いた方法は最小二乗法(Least-Squares method) である。以下にその説明を記述する。 最小二乗法は、評価規範 ・・・・・・・・・・・・・・(3.5) を最小化するθ を求める。 ここで
N k T k k N N R 1 ) ( ) ( 1 ) (
N k k k y N N f 1 ) ( ) ( 1 ) (
N k k y N N c 1 2 ) ( 1 ) ( として式(3.5)を計算すると ) ( ) 2 ( ) ( ) ( c N f N R N JN T T ・・・・・・・・・・・・・・・・・・・・・・(3.6) となる。 ここで未知のパラメータが1つの場合、式(3.6)中の、R(N)、 f(N)、c(N)はすべて スカラになり、それぞれ x 、 r 、 f 、 c とおく。すると式(3.6)は2次方程式となり、 r>0 であるならばJN(N)は下に凸となるためその最小値は次式によって簡単に導出でき る。 c fx rx x J dt d N( ) 2 2 ・・・・・・・・・・・・・・・・・・・・・・・・・(3.7) 従って r f r 、つまり であるときJN(N)は最小値をとる。 一方、未知のパラメータが 2 つ以上の場合、基本的な考え方は同じで式(3.7)の 2 次関数 が式(3.6)の 2 次形式となる。また下に凸であるための条件は行列 R が正定値行列、つま り逆行列が存在するという条件に対応する。
N k T N k N y k k N k N J 1 2 1 2 )} ( ) ( { 1 ) , ( 1 ) (
)
(
)
(
N
R
N
f
x
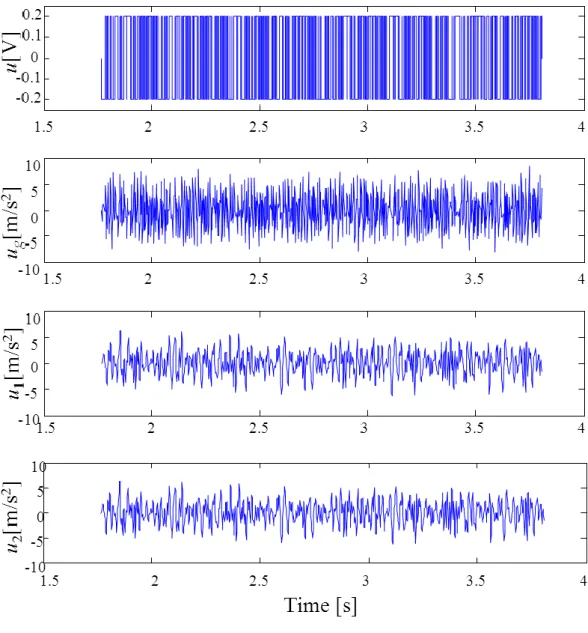
- 24 - 実験条件 同定対象を多モード振動発電デバイスとし、各パラメータは表3.4 に示す。実験条件は 加振軸を鉛直方向とし、加振機を用いて加振を行う。入力信号はM 系列信号とし、周期を 255、入力振幅を 0.2 [V]、加振時間は 2.04 [s]、サンプリング時間は 2 [ms]とした。実験条 件と同定条件を表3.5 に示す。 計測したデータを図3.12 に示す。上から印加電圧、デバイスのベース加速度(入力)、1層 加速度(出力 1)、2 層加速度(出力 2)である。 表3.4 多モードデバイス 各パラメータ 同定対象 板ばねの長さ 0.04 [m] 板ばねの幅 0.02 [m] 板ばねの厚さ 0.0007 [m] 錘の重さ 38×10-3 [kg] 表3.5 同定実験条件 実験条件 加振軸 鉛直方向 加振機 EMIC 512-A(電流制御アンプ付き) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 デバイスのベース(加振機)加速度 ug [m/s 2 ] 同定出力信号 1 デバイスの 1 層加速度 u1 [m/s 2 ] 同定出力信号 2 デバイスの 2 層加速度 u2 [m/s 2 ]
- 25 -
図3.12 同定実験計測データ
- 26 - 3.2.2 加速度と PZT 出力電圧の周波数特性 システム同定で導出された固有周波とで板ばねに貼りつけた2 つの PZT の発電の周波数 特性を確認するために、PZT の発電電圧に対する同定実験を行う。ここでは、正弦波掃引 法を用い、PZT からの電圧出力を計測する。発電特性を正規化するために加振機へ印加し た電圧に対する比としてそのゲインを導出する。測定は 5[Hz]~120[Hz]まで分解能 5[Hz] で行い、ゲインが大きくなった周波数付近では分解能0.1[Hz]で計測した。 システム同定によるデバイスの固有周波数とPZT による発電電圧の比較を図 3.13 に重ね て示す。同図より、まずシステム同定結果から1 層、2 層ともに共振周波数が 3 次モードま で出現していることが確認できる。PZT のゲインもその共振周波数とほぼ一致する周波数 において高くなっていることがわかる。このことから発電デバイスの持つ 3 つの共振周波 数において効率的にPZT が発電できていることが確認できる。また、PZT のゲインは 1 層 では1 次モードのときに最も高くなっているのに対し、2 層では 2 次モードのときが最も高 くなっている。 図3.13 固有周波数と PZT による発電電圧 (左)1 層 (右)2 層
- 27 -
3.3 偏芯構造モデルの同定実験
3.1 節、3.2 節より、試作した多モード発電デバイスは、2 質点型であるのに対し、共振 周波数は3 次モードまで出現している。理論的には 2 つの錘と 2 つの板バネで構成される モデルの共振周波数は 2 次までである。これは錘が質点近似ではないため、モーメント変 化によるねじれ振動が出現していることに起因する。本節では、そのねじれモードに着目 し、ねじれ方向の共振が大きく出現すると考えられる偏芯モデルを作成し、それに対する 同定実験を行った。 3.3.1 偏芯モデル実験条件 偏芯モデルは、従来モデルから錘の向きと貼付位置を変更し、横方向、ねじれ方向の振 動増加を狙える構造とした。従来モデルと偏芯モデルの比較を図3.14 に示す。従来モデル の板バネの長さが60cm なのに対し、偏芯モデルでは圧電素子の貼付スペースの都合により、 板バネの長さを80cm としている。錘は同一のものを使用している。 図3.14 (左)従来モデル (右)偏芯モデル- 28 - 従来モデルとの変化を確認するために、従来モデル、偏芯モデル双方に対して同定実験 を行った。デバイスの各パラメータを表3.6 に示す。今回、偏芯によるねじれ振動への影響 を確認するために、Z 軸加振に加え Y 軸加振も行った。また、加速度計測軸も Z 軸に加え Y 軸での計測も行った。実験条件と同定条件の詳細を表 3.7 に示す。また、加振実験図を図 3.15 に示す。 表3.6 デバイスの各パラメータ パラメータ 従来モデル 偏芯モデル 板ばねの長さ 0.06 [m] 0.08[m] 板ばねの幅 0.02 [m] 0.02[m] 板ばねの厚さ 0.001 [m] 0.001[m] 錘の重さ 38×10-3 [kg] 38×10-3[kg] 表 3.7 実験条件と同定条件 実験条件 加振軸 鉛直方向(Z 軸)、左右方向(Y 軸) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 1 ベースZ 軸加速度uz [m/s2] 同定入力信号 2 ベースY 軸加速度uy[m/s2] 同定出力信号 1 1 層 Z 軸加速度u1z[m/s2] 同定出力信号 2 1 層 Y 軸加速度 u1y[m/s2] 同定出力信号 3 2 層 Z 軸加速度u2z [m/s2] 同定出力信号 4 2 層 Z 軸加速度u2y [m/s2]
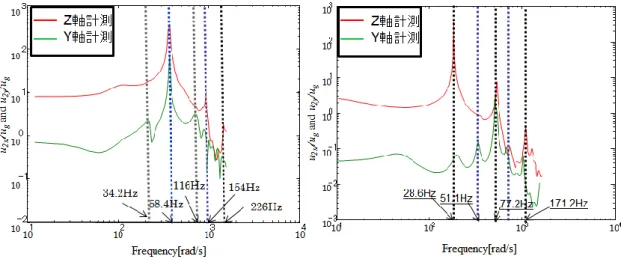
- 29 - 図 3.15 加振実験図 (左)Z 軸加振 (右)Y 軸加振 3.3.2 偏芯モデルのシステム同定 まず、鉛直(Z 軸)加振の結果比較を行う。従来モデルと偏芯モデルの同定結果を図 2.16 に示す。図より、Z 軸方向の共振が三次モードまで出現していることがわかる。また、Z 軸 加振であるため、Z 軸方向の加速度が Y 軸方向より大きくなっていることが確認できる。 偏芯モデルは従来モデルと比較し、Y 軸方向の加速度の共振がより顕著に表れている。錘 を対角に設置したことに起因していると考えられる。その他、偏芯モデルでは板バネを長 くしたことで、共振周波数が従来モデルと比較し、低くなっている。 次に、左右加振(Y 軸)の比較を行う。従来モデルと偏芯モデルの同定結果を図 2.17 に示 す。図より、共振周波数が三次モード以上出現していること、さらに Z 軸加振と異なり、Z 軸計測、Y 軸計測に共通する共振周波数が出現しないことが確認できる。このことから、Y 軸加振時の周波数特性は Z 軸加振時の周波数特性と大きく異なることがわかる。また、従 来モデルと比較し、偏芯モデルでは、ほぼ全域において Y 軸方向の加速度が大きいことが 確認できる。Z 軸加振時と同様に、錘を対角に設置し、偏芯構造としたことにより、Y 軸 方向の振動が増幅されたと考えられる。
- 30 -
図 3.16 Z 軸加振システム同定結果 (左)従来モデル (右)偏芯モデル
- 31 - 3.3.3 偏芯モデルのねじれ振動特性 3.3.2 節では、多モードデバイスを偏芯構造にすることにより、ねじれ振動、横振動を増 幅できることを確認した。本節では、偏芯モデルに PZT 素子を張り付け、板バネのばね定 数が高くなったときの、ねじれ振動への影響を検証する。 PZT 素子を貼りつけた偏芯モデルを図 3.18 に示す。デバイスのパラメータは表と同一で ある。また、アルミニウム単体の板バネのばね定数が 560[N/m]なのに対し、PZT を貼りつ けた板バネのばね定数は 1200[N/m]となり、高くなっていることを確認した。PZT の貼り付 けがない偏芯モデルと、PZT の貼り付けがある偏芯モデルに対し、システム同定により、 比較実験を行った。実験条件を表 3.8 に示す。 図 3.18 PZT を貼りつけた偏芯モデル
- 32 - 表 3.8 PZT の有無による比較実験 実験条件 実験条件 加振軸 鉛直方向(Z 軸) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 ベースZ 軸加速度uz [m/s2] 同定出力信号 1 1 層 Z 軸加速度u1z[m/s2] 同定出力信号 2 1 層 Y 軸加速度u1y[m/s2] 同定出力信号 3 2 層 Z 軸加速度u2z [m/s2] 同定出力信号 4 2 層 Z 軸加速度u2y [m/s2] 出力信号を Z 軸加速度としたときの同定結果を、図 3.19 に示す。図より、ばね定数が高く なったことにより、共振周波数が高域にシフトしていることが確認できる。また、PZT あ りのときの加速度が、1 層 2 層ともにほぼ全域に渡って減少している。このことから、偏芯 モデルにおいて、ばね定数の大きさは振動特性に非常に影響しており、ばね定数が高くな ると、ねじれモードだけでなく、曲げモード時の加速度も低下してしまうことがわかる。 以上のことより、偏芯モデルにおいて、板ばね単体のばね定数を小さくし、さらに貼付す る PZT 素子もばね定数の小さいものが適していると考えられる。
- 33 -
図 3.19 システム同定結果 (左)1 層加速度特性 (右)2 層加速度特性
- 34 -
3.4 偏芯真鍮モデルの同定実験
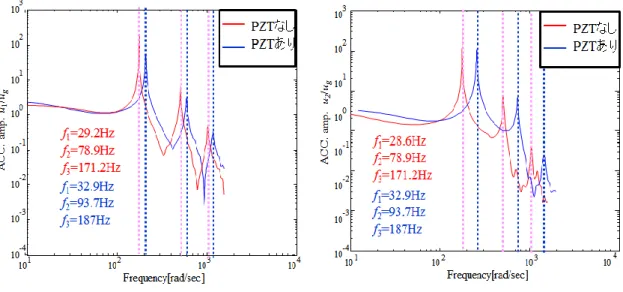
3.4.1 偏芯真鍮モデルの概要 3.3 節より、偏芯モデルにおいて板バネのばね定数が振動特性に大きく影響していること がわかった。その結果を踏まえ、本節では板バネの素材をアルミニウムから真鍮に変更し た真鍮モデルに対する同定実験を行う。真鍮はアルミニウムと比較し、ばね性が高く、塑 性変形しづらいため、板ばねの厚さを薄くでき、ばね定数を低く設定できるからである。 ばね定数を低く設計し、ねじれ振動が増幅されるか検証する。 真鍮モデルでは、アルミニウムのみで作成された偏芯モデルを基本とし、板バネのみを 真鍮に変更した。変更した板バネを図3.20 に、アルミニウムで作成した偏芯 Al モデルと、 板バネを真鍮に変更した偏芯Br モデルを図 3.21 に示す。 図3.20 アルミニウムと真鍮の板バネ 図3.21 偏芯 Al モデルと偏芯 Br モデル- 35 - 3.4.2 偏芯真鍮モデルの同定実験 ばね定数の高い偏芯 Al モデルと、ばね定数の低い偏芯 Br モデルに対して、特性比較の ためシステム同定実験を行った。各偏芯モデルのパラメータを表 3.9 に示す。実験条件は表 と同一である。システム同定結果を図 3.22 に示す。図より、偏芯 Br モデルにおいて、ばね 定数の低下により共振周波数が低くなっていることが確認できる。また、ねじれ振動が強 く発生する二次モードと三次モードにおいて、加速度が大きくなっていることがわかる。 このことから、偏芯モデルにおいて、ばね定数を低く設定することによりねじれ振動をよ り増幅できることがわかった。 表 3.9 各偏芯モデルのパラメータ パラメータ 偏芯 Al モデル 偏芯 Br モデル 板ばねの長さ 0.08[m] 0.08[m] 板ばねの幅 0.02 [m] 0.02[m] 板ばねの厚さ 0.001 [m] 0.0005[m] ばね定数 560[N/m] 103[N/m] 錘の重さ 38×10-3 [kg] 38×10-3[kg] 図 3.22 加速度特性のシステム同定結果 (左)偏芯 Br モデル (右)偏芯 Al モデル
- 36 - 次に、偏芯 Br モデルの各加振方向に対する振動特性の検証を行う。自動車振動は、Z 軸 方向だけでなく、X 方向、Y 方向を含めた三軸振動であるため、偏芯 Br モデルのそれぞれ の加振軸に対しての振動特性の解析を目的とする。Z 軸加振、Y 軸加振、X 軸加振それぞ れの実験図を図 3.23 に示す。各軸の加振に対し、自由端の加速度を三軸で計測する。実験 条件を表 3.10 に示す。 (a)Z 軸加振 (b)Y 軸加振 (c)X 軸加振 図 3.23 各軸加振の実験図
- 37 - 表 3.10 三軸方向加振の実験条件 実験条件 加振軸 鉛直方向(Z 軸)、左右方向(Y 軸) 前後方向(X 軸) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 1 ベースZ 軸加速度uz [m/s2] 同定入力信号 2 ベースY 軸加速度uy[m/s2] 同定入力信号 3 ベースX 軸加速度ux[m/s2] 同定出力信号 1 1 層 Z 軸加速度 u1z[m/s2] 同定出力信号 2 1 層 Y 軸加速度 u1y[m/s2] 同定出力信号 3 1 層 X 軸加速度 u1x[m/s2] 同定出力信号 4 2 層 Z 軸加速度 u2z [m/s2] 同定出力信号 5 2 層 Z 軸加速度 u2y [m/s2] 同定出力信号 6 2 層 X 軸加速度 u2x[m/s2]
- 38 - 3.4.3 Z 軸加振 Z 軸加振時の同定結果を図 3.24 に示す。図より、Z 軸加振時、一次モードでは Z 軸方向 の加速度が最大となっていることがわかる。また、Z 軸方向の加速度が、Y 軸加速度、X 軸加速度と比較し非常に大きいことから、一次モードでは縦振動(鉛直方向)が支配的である ことがわかる。続いて、二次モードであるが、最も加速度が大きくなったのは Y 軸となり、 二次モードではねじれ振動が最大となることがわかる。また、Z 軸加速度、X 軸加速度も 大きいことから、二次モードではねじれ振動が最大となるが、三軸全ての振動成分を含ん だ振動となっていることがわかる。三次モードでは、三軸全ての加速度にほぼ差が無いこ とがわかる。 図 3.24 Z 軸加振時の 2 層の加速度特性
- 39 - 3.4.4 Y 軸加振 Y 軸加振時の同定結果を図 3.25 に示す。図より、Y 軸加振時、一次モードでは Y 軸方向 の加速度が最大となっており、ねじれ振動、縦振動の順で振動が大きく発生していること がわかる。二次モードでは、Y 軸加速度が非常に大きく、ねじれ振動が支配的であること がわかる。三次モードでは、Z 軸加振時と同様に、三軸全ての加速度にほぼ差が無いこと から、三方向の振動が同程度で発生することがわかる。 図 3.25 Y 軸加振時の 2 層の加速度特性
- 40 - 3.4.5 X 軸加振 X 軸加振時のシステム同定結果を図 3.26 に示す。図より、X 軸加振時、一次モードでは Z 軸方向の加速度が最大となっており、縦振動、横振動の順で振動が大きく発生している ことがわかる。Z 軸加振、Y 軸加振時の一次モードは、それぞれ加振方向の加速度が最大 となっており、X 軸加振とは異なる結果となった。二次モードでは、X 軸加速度が大きく、 横振動、縦振動の順となった。三次モードでも同様に、横振動が主で、次いで縦振動が強 く発生する結果となった。 図 3.26 X 軸加振時の 2 層の加速度特性
- 41 -
3.5 3 章まとめ
本章では、多モードデバイスを作成し、加振実験を行った。多モードデバイスの特性と して、多モードの共振が出現すること、その共振周波数で PZT 出力電圧も高くなることを 確認した。多モードデバイスは、錘の大きさの影響でねじれモードが出現し、そのねじれ モードは錘を対角に設置した偏芯構造にすることで、増幅できることがわかった。ねじれ 振動には、ばね定数が大きく影響しており、ばね定数が低い板バネで多モードデバイスを 設計することにより、ねじれ振動を更に増幅することが可能である。板バネの素材を真鍮 にし、薄くすることでばね定数を低く設計した偏芯 Br モデルに対して行った、三軸方向の 同定実験のまとめを表 3.11 に示す。表より、一次モードは縦振動が支配的であり、一次モ ードは曲げが強く出現しているといえる。二次モードはねじれ振動が強く現れ、ねじれ振 動が強く出現し、縦振動、横振動も含んだ振動特性である。三次モードは、縦振動、ねじ れ振動、横振動全てが同程度出現する振動特性であることがわかる。自動車振動は、本実 験のような一軸振動ではなく、鉛直、左右、前後と三軸振動である。そのため、鉛直方向 の共振の大きさだけでなく、ねじれ振動や横振動を増幅するデバイス構造を用いることで、 全振動成分を効率よく利用することが可能となる。 表 3.11 三方向加振実験のまとめ 一次モード 二次モード 三次モード Z 軸加振 縦振動 ねじれ振動が主の 全ての振動成分 全ての振動成分 Y 軸加振 ねじれ振動、縦振動 ねじれ振動 全ての振動成分 X 軸加振 縦振動 横振動、縦振動 横振動、縦振動- 42 -
第 4 章 多モードデバイスの強制加振実験
本章では、多モードデバイスに対して強制加振実験を行い、加速度特性、PZT 出力特性、 また抵抗を負荷して出力エネルギー評価を行う。4.1 多モード振動発電デバイスのエネルギー評価
前章では、デバイスの共振周波数と PZT 電圧の出力特性の振動周波数は一致することが 確認できた。本節では、PZT に抵抗を負荷し、最大電力評価、エネルギー評価を行った。 PZT の静電容量は、素子の材料によって決まり、本論文で使用している PZT である LPD3713X の静電容量は 21.1[μF]である。これより、多モードデバイスの共振周波数 f を用 いて、キャパシタのインピーダンス式 X = 1 2𝜋𝑓 × 21.1 × 10−9 によって整合抵抗値を求めることができる。本実験では、まずシステム同定により、多 モードデバイスの共振周波数を求め、整合抵抗値を導出する。続いて抵抗を負荷したうえ で、共振周波数の正弦波で加振し、最大電力評価、エネルギー評価を行った。デバイスの パラメータを表 4.1 に、同定実験の実験条件を表 4.2 に示す。 システム同定結果を図 4.1 に示す。3 章の同定結果と周波数特性が異なっているのは、 デバイスのパラメータやクランプ環境の変化によるものである。図より、多モードの共振 が現れていることが確認できる。出力電圧は 68Hz のときに、1 層、2 層ともに最大となっ ている。この結果より、正弦波による強制加振実験時の負荷抵抗は 68Hz 相当の整合抵抗で ある 140[kΩ]を負荷して行う。 表 4.1 デバイスパラメータ パラメータ 板ばねの長さ 0.06 [m] 板ばねの幅 0.02 [m] 板ばねの厚さ 0.001 [m] 錘の重さ 28×10-3 [kg]- 43 - 表 4.2 同定実験の実験条件 実験条件 加振軸 鉛直方向(Z 軸) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 1 ベース加速度uz [m/s2] 同定出力信号 1 1 層加速度u1 [m/s2] 同定出力信号 2 2 層加速度u2 [m/s2] 同定出力信号 3 1 層 PZT 出力電圧 PZT1[V] 同定出力信号 4 2 層 PZT 出力電圧 PZT2[V] 図 4.1 システム同定結果 (左)加速度特性 (右)PZT 出力特性
- 44 - 続いて、正弦波による強制加振実験を行う。実験条件を表 4.3 に示す。前述した通り、負 荷抵抗は 140[kΩ]としている。また、ベース加速度を 0.6[G]としているのは、加速度センサ の片振幅が飽和しない範囲で最大になるよう調整しているためである。正弦波は、加速度、 PZT 出力電圧ともに大きい 54Hz、165Hz の周波数を入力する。 表 4.3 正弦波による強制加振の実験条件 実験条件 加振軸 鉛直方向(Z 軸) 入力信号 正弦波(54Hz、165Hz) 入力振幅 ベース加速度が0.6G となるよう調整 加振時間 10s サンプリング時間 0.1ms 負荷抵抗 140kΩ(54Hz 相当)
- 45 - 54Hz 正弦波入力時の時間応答波形を図 4.2 に、165Hz 正弦波入力時の時間応答波形を図 4.3 に示す。両図より加速度、PZT 出力ともに、54Hz 加振時が高く、また 1 層より 2 層側が 大きいことが確認できる。これは図 4.1 の同定結果と一致しており、システム同定の信頼性 を確認できる結果となった。同様に、1 層と 2 層の出力比もシステム同定結果と一致してい る。 図 4.2 54Hz 正弦波入力時の時間応答波形 (左)加速度 (右)PZT 出力 図 4.3 165Hz 正弦波入力時の時間応答波形 (左)加速度 (右)PZT 出力
- 46 - 次に、最大電力、エネルギーを導出する。最大電力、エネルギーは 𝑃𝑚𝑎𝑥[𝑊] = 𝑣𝑚𝑎𝑥2 𝑅 E[J] =1 𝑅∫ 𝑣2(𝑡)𝑖𝑑𝑡 𝑡 0 により求めることができる。ここで、vmaxは出力電圧の最大値、R は負荷抵抗値、i は電流 である。各周波数に対する最大電力、エネルギーを表 4.4 に示す。エネルギーの評価は定常 状態に達してから 1 周期分を算出している。表より、最大電力、エネルギーともに、54Hz 加振時の 2 層が最大となることが確認できる。また、1 層 2 層ともに 54Hz 加振時の出力が 165Hz の出力と比較し、非常に高い結果となった。これは 54Hz 共振時の加速度、応力が、 165Hz と比較し高いことが原因と考えられる。 表 4.4 各周波数に対する最大電力、エネルギー Output Forced vibration 1st layer Max Power[10-9W] 2nd layer Max Power[10-9W] 1st layer Energy[10-12J] 2nd layer Energy[10-12J] Sum of Energy[10-12J] 54Hz 175 4810 1480 43400 44880 165Hz 5 632 8 190 198
- 47 -
4.2 多モードデバイスと一質点デバイスとの出力比較
4.2.1 一質点デバイスに対するシステム同定 前節では、多モードデバイスの最大電力評価、エネルギー評価を行った。本節では、多 モードデバイスの特長である多モードの共振を持つという特性の有用性を確認するために、 一質点デバイスとの比較実験を行う。ターゲットとしている自動車振動は、多モードの共 振を有した振動である。そのため、多モードの共振を有した入力信号を印加した時の最大 電力比較、エネルギー比較を行うことで、多モードデバイスと一質点デバイスの差別化を 行うことができる。作成した一質点デバイスを図 4.4 に示す。図からわかるように、1 つの 質点と 1 枚の板バネによって構成される。 まず、作成した一質点デバイスに対して、同定実験を行う。デバイスのパラメータは表 4.1 と同一である。実験条件を表 4.5 に示す。また、システム同定結果を図 4.5 に示す。図 より、共振周波数が 38Hz と 165Hz であり、共振が二次モードまで出現していることが確認 できる。本来、一質点構造の共振周波数は、ばね定数 k と質量 m を用いて ω = √𝑘 𝑚⁄ により 1 つ導出される。上式は、質点をある質量を持った理想的な点として扱っている。 このことから、165Hz に見られる共振は、錘の分布定数系に起因した高次モードの共振と考 えられる。錘が理想的な質点ではないため、重心位置のズレやモーメント変化が生じるこ とでデバイスの振動特性に影響を及ぼしている。 図 4.4 一質点デバイス- 48 - 表 4.5 一質点システム同定実験条件 実験条件 加振軸 鉛直方向(Z 軸) 入力信号 M 系列信号(周期 255) 入力振幅 0.2 [V] 加振時間 2.04 [s](1020 サンプル:4 周期分) サンプリング時間 2 [ms] 同定条件 同定モデル ARX モデル 次数決定法 クロスバリデーション 同定入力信号 1 ベース加速度uz [m/s2] 同定出力信号 1 自由端加速度u1 [m/s2] 同定出力信号 3 PZT 出力電圧 PZT1[V] 図 4.5 一質点システム同定結果
- 49 - 一質点デバイスが多モードの共振を有していると、多モードデバイスと比較できないた め、より質点近似に近い一質点デバイスを作成した。新たに作成した一質点デバイスを図 4.6 に示す。デバイスのパラメータは表 4.4 と同一である。錘を横に配置し、高さを抑える ことにより、重心位置を低くし質点近似に近づけている。本デバイスに対してシステム同 定実験を行った。実験条件は表 4.5 と同一である。システム同定結果を図 4.7 に示す。図よ り、高次モードの共振が無くなり、共振周波数が 41Hz の一次モードのみになったことがわ かる。加速度特性、PZT 出力特性ともに 41Hz で最大となっている。また、図 4.5 の同定結 果と比較し、共振周波数が高くなっていることが確認できる。この結果から、錘の大きさ や重心位置によってデバイスの振動特性が変化してしまうことが確認できた。 図 4.6 質点近似一質点デバイス 図 4.7 質点近似一質点デバイスに対するシステム同定結果
- 50 - 4.2.2 多モードデバイス (質点近似モデル)に対するシステム同定 前節より、錘を質点近似に近づけた一質点デバイスを作成した。その一質点デバイスと の実験比較を正規化するために、本節では多モードデバイスも同様に質点近似モデルでの 作成を行った。今回作成した多モードデバイス(質点近似モデル)と、従来の多モードデバイ スの比較図を図 4.8 に示す。質点近似モデルに対してシステム同定実験を行った。デバイス パラメータは表 4.1 と同一である。また実験条件は表 4.2 と同一である。システム同定結果 を図 4.9 に示す。図より、多モードの共振が確認できる。図 4.1 の従来モデルの同定結果と 比較すると、165Hz の共振が無くなっている。質点近似に近づいたことで、分布定数系の影 響がなくなったと考えられる。このことから、165Hz の共振はねじれモードと言える。 図 4.8 多モードデバイス (左)従来モデル (右)質点近似モデル 図 4.9 質点近似モデル同定結果(左)加速度特性(右)PZT 出力特性
- 51 - 4.2.3 両デバイスに対する強制加振実験 4.2.1 節、4.2.2 節にて、一質点デバイスの質点近似モデル、多モードデバイスの質点近似 モデルを作成し、同定実験を行った。本節では、作成した両デバイスに対して、強制加振 実験を行い、最大電力、エネルギー評価を行う。本実験では、共振周波数の正弦波の他に、 異周期正弦波の和を入力信号として用いる。これは、自動車振動のような複数の振動周波 数を持つ振動が印加されたときの特性を検証するためである。実験条件を表 4.6 に示す。異 周期正弦波和の入力信号は、多モードデバイスに対しては 2 つの共振周波数の和を入力す る。一質点デバイスに対しては、共振周波数である 41Hz に加え、200Hz の正弦波を入力す る。200Hz の選定理由は、多モードデバイスの入力周波数比に合わせたからである。49Hz と、49Hz の 4.9 倍の 240Hz を入力としているので、一質点デバイスに対しても 41Hz の 4.9 倍の 200Hz を入力周波数とした。また、負荷抵抗は、同定結果より最大出力が確認できた 共振周波数相当の整合抵抗値をそれぞれ負荷している。 表 4.6 強制加振実験の実験条件 一質点デバイスに対する実験条件 加振軸 鉛直方向(Z 軸) 入力信号 正弦波(41Hz、200Hz) 異周期正弦波和(41Hz+200Hz の正弦波の和) 入力振幅 ベース加速度が0.6G となるよう調整 加振時間 10s サンプリング時間 0.1ms 負荷抵抗 170kΩ(41Hz 相当) 多モードデバイスに対する実験条件 加振軸 鉛直方向(Z 軸) 入力信号 正弦波(49Hz、240Hz) 異周期正弦波和(49Hz+240Hz の正弦波の和) 入力振幅 ベース加速度が0.6G となるよう調整 加振時間 10s サンプリング時間 0.1ms 負荷抵抗 150kΩ(49Hz 相当)
- 52 - 一質点デバイスを 41Hz+200Hz の正弦波和で強制加振したときの時間応答波形を図 4.10 に示す。図より入力電圧に 41Hz の成分と 200Hz の成分が確認できる。ベース加速度はノイ ズが乗っているが、41Hz と 200Hz を含んだ振動をしていることがわかる。それに対し、自 由端加速度、PZT 出力電圧の時間応答は 41Hz の正弦波波形となっており、200Hz の振動が 含まれていないことがわかる。このことから、一質点デバイスは共振周波数のみで出力が 高くなり、それ以外の周波数域では出力が見込めないことがわかる。 (a)時間応答波形 (上)入力電圧 (下)ベース加速度 (b)時間応答波形 (上)自由端加速度 (下)PZT 出力電圧 図 4.10 41+200Hz 加振時の時間応答波形
- 53 - 一質点デバイスの各周波数に対する最大電力、エネルギーを表 4.7 に示す。最大電力、エネ ルギーの導出式は 4.1 節と同様であり、エネルギー評価時間も同様に 1 周期分としている。 41Hz+200Hz の正弦波和に対しては、41Hz の 1 周期分で算出している。表より、41Hz 加振 時が、最大電力、エネルギーともに最大となることが確認できる。200Hz 加振時は、ほぼ出 力が見られない。また、41Hz+200Hz 加振時の出力は、41Hz 加振時と 200Hz 加振時の出力 の和とはならないことがわかった。最大電力、エネルギーからも、一質点デバイスでは、 共振周波数以外の周波数では、ほぼ発電できず、また多モードの振動に対しても出力が低 下することが確認できた。 表 4.7 一質点デバイスの各周波数に対する最大電力、エネルギー Output Forced vibration 1st layer Max Power[10-9W] 1st layer Energy[10-12J] 41Hz 2860 34500 200Hz 2 2 41Hz+200Hz 2700 33500
- 54 - 多モードデバイスを 49Hz+240Hz の正弦波和で強制加振したときの時間応答波形を図 4.11 に示す。一質点デバイスのときと同様に、入力電圧は 49Hz と 240Hz の正弦波を足し合わせ た波形となっており、ベース加速度も 49Hz と 240Hz を含んだ加速度が確認できた。加速度、 PZT 出力の時間応答波形から、一質点デバイスとは異なり、49Hz の振動成分に加え、240Hz の振動成分も確認できる。このことから、多モードデバイスは、1 つの共振周波数だけでは なく、デバイスの持つ全ての共振周波数で発電できることがわかった。 (a)時間応答波形 (上)入力電圧 (下)ベース加速度 (b)時間応答波形 (上)1 層、2 層加速度 (下)1 層、2 層 PZT 出力電圧 図 4.11 49+240Hz 加振時の時間応答波形
- 55 - 多モードデバイスの各周波数に対する最大電力、エネルギーを表 4.8 に示す。一質点デバイ スと同様の最大電力、エネルギー導出式を用い、エネルギーの評価時間も 1 周期分として いる。49Hz+240Hz の正弦波和に対しては 49Hz の 1 周期分で算出している。表より、 49Hz+240Hz 加振時が最大電力、エネルギーともに最大となった。このことから、多モード デバイスでは、デバイスの持つ全ての共振周波数で発電でき、複数の振動モードを持つ入 力に対しても効率的に発電できることがわかった。また、全入力において、1 層より 2 層側 の最大電力、エネルギーが大きい結果となった。一質点デバイスと比較すると、49Hz+240Hz 加振時の最大電力、エネルギーが最大となったこと、また 2 層側の出力が非常に大きくな ったため、結果として総出力が一質点より大きくなったことが挙げられる。 表 4.8 多モードデバイスの各周波数に対する最大電力、エネルギー Output Forced vibration 1st layer Max Power[10-9W] 2nd layer Max Power[10-9W] 1st layer Energy[10-12J] 2nd layer Energy[10-12J] Sum of Energy[10-12J] 49Hz 124 9450 1130 97500 98630 240Hz 5 55 4 99 103 49Hz+240Hz 148 10600 1190 99100 100290
- 56 -
4.3 多モードデバイスの振動特性解析
前節では、一質点デバイスと多モードデバイスの質点近似モデルに対して強制加振実験 から最大電力、エネルギー評価を行った。その結果、多モードデバイスにおいて、1 層側と 比較し、2 層側の出力が非常に大きいことが確認できた。本節では、2 層側の出力が大きい 結果に対する解析を目的として、多モードデバイスに対して、理論モード解析とSolidworks による振動解析を行い、デバイスの振動特性の解析を行う。 4.3.1 理論モード解析 まずは多モードデバイスの理論モード解析を行った。振動特性とは、振動現象を表すた めに必要な情報である「固有周波数」「モード減衰比」「固有モード」などのことである。 理論モード解析は、固有値解析に代表されるように、理論モデルの質量行列と剛性行列か ら固有値問題を解くことで、固有値と固有ベクトルを求めることで行う。固有値は固有周 波数、固有ベクトルは固有モードと対応している。 多モードデバイス(質点近似モデル)の力学モデルを図 4.12 に示す。多モードデバイスの 力学モデルの物理パラメータを求めることにより多モードデバイスのモデル化を行う。図 より多モードデバイスの各層に対する運動方程式は 𝑚1𝑢̈1+ (𝑘1+ 𝑘2)𝑢1− 𝑘2𝑢2= −𝑚1𝑢̈𝑔 (4.1) 𝑚2𝑢̈2− 𝑘2𝑢1+ 𝑘2𝑢2= −𝑚2𝑢̈𝑔 (4.2) となる。今回は、簡単のため、減衰係数を0 としている。式(4.1)、式(4.2)を質量マトリク スM、剛性マトリクスKを用いて書き表すと次式となる。 𝑀𝑢̈ + 𝐾𝑢 = −𝑚𝑢̈𝑔 (4.3) ここで 𝑀 = [𝑚01 𝑚0 2] , 𝐾 = [ 𝑘1+ 𝑘2 −𝑘2 −𝑘2 𝑘2 ] 𝑚 = [𝑚𝑚1 2] , 𝑢 = [ 𝑢1 𝑢2] である。- 57 - デバイスの自由振動式は、式(4.3)にて外生入力項である右辺を 0 とし 𝑀𝑢̈ + 𝐾𝑢 = 0 (4.4) ここで状態方程式は次式となる。 𝑥̇ = 𝐴𝑥 (4.5) ただし 𝑥 = [𝑢𝑢̇] , 𝐴 = [−𝑀0−1𝐾 0𝐼] (4.6) ここで状態変数の解をx = φestとすれば、式(4.5)は次式となる。 [𝑠𝐼 − 𝐴]𝜑 = 0 (4.7) 式(4.7)において φ = 0 は外生入力項が 0 のときデバイスの応答も 0 であるという自明な解 である。式(4.7)が振動する解(φ ≠ 0)を持つためには、係数マトリクスの行列式[sI - A]が 0 となればよい。固有周波数、固有モードは、それぞれマトリクスAの固有値sと固有ベク トルφに対応する。 図4.12 多モードデバイスの力学モデル
- 58 - 多モードデバイスの物理パラメータを表4.9 に示す。表 4.9 に示した物理パラメータのとき の多モードデバイスの振動形を2 層の半周期間で図示したものを図 4.13 に示す。縦軸は各 層を表し、横軸は各層の変位を表す。同図では、2 層の変位を 1 と固定し、それに対する 1 層変位を示している。固有値より、固有周波数は一次モード18.6[Hz]、二次モード 48.6[Hz] となった。図4.13 のシステム同定結果の共振周波数と非常に近い値であることが確認でき る。図より二次モードの変位は、1 層より 2 層側の変位が大きいことがわかる。これは、二 次モードの1 層より 2 層側の出力が大きい実験結果と一致している。また、一次モードで は、2 層より 1 層側の変位が大きく、同定結果と一致している。以上より、理論モード解析 と実験結果の妥当性がある。 表4.9 デバイスの物理パラメータ パラメータ m1 28×10 -3 [kg] m2 28×10 -3 [kg] k1 1000 [N/m] k2 1000[N/m] 図4.13 多モードデバイスの振動形