学位論文 Doctoral Thesis
頭蓋内画像誘導放射線治療における Intra-Fractional Motion 低減に 関する研究
Reduction of Intra-Fractional Motion in Image-Guided Cranial Radiotherapy
稲田 宏規 Hiroki Inata
指導教員 荒木 不次男 教授
熊本大学大学院保健学教育部博士後期課程保健学専攻
2016年3月
甲 中表紙
学位論文 Doctoral Thesis
論文題名 : 頭蓋内画像誘導放射線治療におけるIntra-Fractional Motion低減に関する研究
(Reduction of Intra-Fractional Motion in Image-Guided Cranial Radiotherapy)
著者名 : 稲田 宏規
(単名) Hiroki Inata
指導教員名 : 熊本大学大学院保健学教育部博士後期課程保健学専攻 荒木 不次男 教授 審査委員名 : 主 査 教授 村上 龍次
副 査 教授 船間 芳憲 副 査 教授 荒木不次男
2016年3月
目 次
要旨 ………..….….……….….…...1
博士後期課程在籍中の論文一覧 ……….………….…….2
謝辞………..….….……….….…...4
略語一覧……….………..…………5
第1章 序論 1.1 本研究の背景 1.1.1 がん治療と定位放射線治療……….………6
1.1.2 定位放射線治療と固定精度………9
1.1.3 定位放射線治療における Intra-Fractional Motion………13
1.1.4 Real-Time 検知装置………14
1.1.5 定位放射線治療に要求される固定精度管理………17
1.2 本研究の概要………19
1.3 本研究の構成………20
第 2 章 固定具の固定精度検証用ファントムの開発 2.1 緒言………21
2.2 方法 2.2.1 固定精度検証用ファントムの材料,構造,作製方法………22
2.2.2 Target Locating System によるファントム変位の検出精度………22
2.2.3 Target Locating System による固定精度の評価 ………23
2.2.4 固定精度検証におけるファントム変位量の決定 ……….…….27
2.2.5 固定具の固定精度検証 ……….……….28
2.3 結果 2.3.1 固定精度検証用ファントムの作製 ………29
2.3.2 Target Locating System によるファントム変位の検出精度 ………29
2.3.3 固定精度検証におけるファントム変位量の決定 ………33
2.3.4 固定具の固定精度検証 ……….………36
2.4 考察 2.4.1 Target Locating System によるファントム変位の検出精度 ………38
2.4.2 固定精度検証におけるファントム変位量の決定 ……….…….38
2.4.3 固定具の固定精度検証 ……….……….39
2.5 まとめ ……….……40
第 3 章 圧力センサを用いた Intra-Fractional Motion 検知装置の開発
3.1 緒言 ……….………41
3.2 計測装置の構造と原理 3.2.1 原理 ………42
3.2.2 Hook の法則に基づく吸引式枕の変位量 ………44
3.3 モデリングと性能評価 3.3.1 バネ定数の決定 ………45
3.3.2 Sensitivity , Specificity ,及び Accuracy 3.3.2.1 Target Locating System による頭部変位の検出及び分類 ………46
3.3.2.2 圧力計による頭部変位の検出及び分類 ………49
3.3.2.3 Sensitivity, Specificity 及び Accuracy の算出 ………49
3.3.3 被ばく線量低減率の評価………49
3.4 結果 3.4.1 Hook の法則に基づく吸引式枕の変位量………51
3.4.2 バネ定数の決定………51
3.4.3 Sensitivity,Specificity,及び Accuracy 3.4.3.1 Target Locating System による頭部変位の検出及び分類………52
3.4.3.2 Sensitivity, Specificity 及び Accuracy の算出………53
3.4.4 被ばく線量低減率の評価………56
3.5 考察 3.5.1 Hook の法則に基づく吸引式枕の変位量……….…………57
3.5.2 バネ定数の決定………57
3.5.3 Sensitivity,Specificity,及び Accuracy 3.5.3.1 Target Locating System による頭部変位の検出及び分類………57
3.5.3.2 Sensitivity, Specificity 及び Accuracy の算出………58
3.5.4 被ばく線量低減率の評価………..59
3.6 まとめ……….…59
第 4 章 頭部固定マスクにおける頭部圧迫による固定精度への影響 – ファントム検証 4.1 緒言……….………....60
4.2 方法 4.2.1 臨床及びファントムでの接触圧力の評価………60
4.2.2 ファントムによる固定精度検証 ………60
4.3 結果
4.3.1 臨床及びファントムでの接触圧力の評価 ………..………63
4.3.2 ファントムによる固定精度検証 ………64 4.4 考察
4.4.1 臨床及びファントムでの接触圧力の評価 ………..………65
4.4.2 ファントムによる固定精度検証 ………67
4.5 まとめ ……….……67
第 5 章 結論
5.1 研究成果の概要と結論
5.1.1 固定具の固定精度検証用ファントムの開発 ………….….………68
5.1.2 圧力センサを用いた Intra-Fractional Motion
検知装置の開発 ……….………….……68
5.1.3 頭部固定マスクにおける頭部圧迫による固定精度への影響
– ファントム検証 ……….………69 5.2 今後の課題……….70
参考文献……….………71
本論文中の図及び表について
The American Association of Physicists in Medicine (AAPM) published the original version of figure 1-4, 2-1 to 2-3, 2-5 to 2-8 and table 2-1 to 2-2 in the English language. This translation has not been verified by AAPM.
図 1-4, 2-1 から 2-3, 2-5 から 2-8 及び表 2-1 と 2-2 の原版は, American Association of Physicists in Medicine (AAPM) によって英語表記で出版されている.日本語翻訳につい ては, AAPM の承認を受けていない.
http://scitation.aip.org/content/aapm/journal/medphys/39/7/10.1118/1.4728978 DOI: 10.1118/1.4728978
The Physics in Medicine and Biology (PMB) published the original version of figure 3-1 to 3-7 and table 3-1 to 3-3 in the English language. This translation has not been verified by PMB.
図 3-1 から 3-7 及び表 3-1 から 3-3 の原版は, Physics in Medicine and Biology (PMB) によ って英語表記で出版されている.日本語翻訳については, PMB の承認を受けていない.
http://iopscience.iop.org/article/10.1088/0031-9155/60/18/7229/meta
DOI: 10.1088/0031-9155/60/18/7229
1 要 旨
【背景と目的】
頭蓋内定位放射線治療では 1-2 mm の固定精度が要求される.近年,画像誘導放射線 治療によって日々の患者位置決め精度とその再現性が飛躍的に向上したため,照射中の 固定精度管理が重要となっている.本研究では,照射中の頭部固定精度を担保するため に,固定精度を定量的に検証するファントムと Real-Time Intra-Fractional Motion 検知装置 を開発し,頭部固定マスクと枕の固定精度と頭部圧迫の関係について解析した.
【方 法】
外部からの荷重によって治療中の頭部変位を再現可能なファントムを作成した. 15 名の臨床データに基づき固定精度検証における頭部変位量を推定し, 3 種類の固定マス クを用いて荷重ごとにファントム変位量を測定した.ファントム変位量の測定には,
Cyberknife 装置の Target Locating System ( TLS )を用いた.一方, Real-Time Intra-Fractional
Motion 検知装置は,吸引式枕上に配置した 4 つの圧力センサにより頭部にかかる荷重を
測定し,荷重と吸引式枕の変位に成り立つ Hook の法則を利用して頭部変位量を測定し た.まず, Hook の法則における吸引式枕のバネ定数を 2999 回の TLS 照合データと荷重 とを比較して求めた.次に,データの真偽分類を示した混同行列を利用して,本装置の Sensitivity , Specificity ,及び Accuracy を求めた.また,本装置と TLS を同時に使用した 場合の被ばく線量の低減率を計算により推定した.さらに,頭部固定マスクにおいて,
スペーサ未使用時, 1 mm 及び 3 mm 厚使用時の固定状態で,荷重ごとにファントム変 位量を測定した.
【結果と考察】
固定精度の検証において, 3 種類の頭部固定マスクにおける荷重とファントム変位量 の関係は直線関係となった.この直線の傾きが固定具の精度に相当する.一方,
Real-Time Intra-Fractional Motion 検知装置において,吸引式枕のバネ定数は 1.6 N/mm で あり, 1 mm , 1.5 mm ,及び 2 mm の頭部変位量を検出するときの Accuracy はそれぞれ 67% , 84% ,及び 89% であった.本装置と TLS を同時に使用した場合,被ばく線量の低 減率は, TLS 単独の場合と比較して約半分であった.また,固定圧力を高くした方がフ ァントム変位量は Inferior-Superior,Right-Left 方向に対して少なく,統計的に有意差が みられた(p=0.008).
【結 論】
開発したファントムによって固定具の固定精度を定量的に推定することが可能にな
った.Real-Time Intra-Fractional Motion 検知装置では,1-2 mm の精度で頭部の動きを検
知することが可能であり, TLS と併用することで X 線画像照合による被ばく線量を従
来の約半分に低減できる可能性が示唆された.また,スペーサ等を用いて固定圧力を高
くすることで固定精度向上の可能性が示された.
2 博士後期課程在籍中の論文一覧
筆頭論文 計 2 編
Inata, H., Semba, T., Itoh, Y., Kuribayashi, Y., Murayama, S., Nishizaki, O., & Araki, F . Development of a phantom to evaluate the positioning accuracy of patient immobilization systems using thermoplastic mask and polyurethane cradle . Medical Physics . 2012 , 39(7) : 4219-4227.
Inata H, Araki F, Kuribayashi Y, Hamamoto Y, Nakayama S, Sodeoka N, Kiriyama T, & Nishizaki O. Development of a real-time monitoring system for intra-fractional motion in intracranial treatment using pressure sensors . Physics in Medcine and Biology . 2015, 60(18) : 7229-7243.
共著論文 計 2 編
Hamamoto, Y., Inata, H., Sodeoka N, Nakayama S, Tsuruoka S, Takeda H, Manabe T, Mochizuki T, & Umeda M. Observation of intrafraction prostate displacement through the course of conventionally fractionated radiotherapy for prostate cancer. Japanese Journal of Radiology.2015,33(4):187-93.
Hamamoto, Y., Inata, H., Tsuruoka S, Takeda H, & Manabe T.Influence of Dose Calculation
Algorithm According to Dose Prescription Methods in Stereotactic Body Radiotherapy for Lung
Cancer.Austin J Radiat Oncol & Cancer.2015,1(2):1010
3 本論文の主な内容を構成する論文
Inata, H., Semba, T., Itoh, Y., Kuribayashi, Y., Murayama, S., Nishizaki, O., & Araki, F . Development of a phantom to evaluate the positioning accuracy of patient immobilization systems using thermoplastic mask and polyurethane cradle . Medical Physics . 2012 , 39(7) : 4219-4227.
Inata H, Araki F, Kuribayashi Y, Hamamoto Y, Nakayama S, Sodeoka N, Kiriyama T, & Nishizaki
O. Development of a real-time monitoring system for intra-fractional motion in intracranial
treatment using pressure sensors . Physics in Medcine and Biology . 2015, 60(18) : 7229-7243.
4 謝 辞
本研究を行うにあたり,終始熱心なるご指導とご鞭撻を賜りました熊本大学大学院生 命科学研究部 荒木不次男教授に心から御礼申し上げます.また,惜しみないご支援賜 りました熊本大学医学部付属病院中口裕二博士及び荒木研究室の皆様に心からお礼申 し上げます.
サイバーナイフシステムの技術的な情報を提供して頂いた日本アキュレイ株式会社 の大橋浩史博士,及びスタッフの皆様に深く感謝しております.また,吸引式枕及びベ ースプレートの製作に当たり技術的支援を賜りましたエンジニアリングシステム株式 会社の塩原一也様,ならびに有限会社クオリタの北條正道様には深く感謝致します.
今回の実験に対し設備使用許可にご尽力いただいた済生会今治病院西崎統副院長を はじめ,本研究に協力いただいた済生会今治病院の放射線治療スタッフの皆様及びご支 援賜りました済生会今治病院のすべての皆様に深謝致します.
最後に,小生の博士後期課程進学に対し支援してくれた家族に感謝の意を表して謝辞 と致します.
本研究の一部は,2014-2015 年度日本放射線腫瘍学会(JASTRO)研究課題として採
択され研究助成を受けました.
5 略語一覧
QOL quality of life 生活の質
LINAC linear accelerator 直線加速器
AVM cerebral arteriovenous malformation 脳動静脈奇形
SRS stereotactic radiosurgery 定位放射線手術
SRT stereotactic radiation therapy 定位放射線治療
CT computed tomography コンピュータ横断面撮像
ICRU international commission on radiation units & measurements
GTV gross tumor volume 肉眼的腫瘍体積
CTV clinical target volume 臨床的標的体積
PTV planning target volume 計画標的体積
OAR organs at risk 危険臓器
PRV planning organ at risk volume 計画危険臓器体積
ITV internal target volume 体内標的体積
IGRT image guided radiation therapy 画像誘導放射線治療
TLS target locating system
DRR digital reconstructed radiography
aSi amorphous silicon アモルファスシリコン
RMS root mean square 平均 2 乗根
QA quality assurance 品質保証
EPID electric portal imaging device CBCT cone beam computed tomography
AAPM American association of physicists in medicine 米国医学物理学会 SBRT stereotactic body radiation therapy 体幹部定位放射線治療
TPS treatment planning system 放射線治療計画装置
6
第1章 序 論
1.1 本研究の背景
1.1.1 がん治療と定位放射線治療
わが国における死亡率の年次推移を死因別にみると,明治から昭和初期まで多かった 結核,肺炎などの感染症が第2次世界大戦後急速に減少し,代わりに生活習慣病(がん,
心疾患,脳血管疾患など)による死亡が上位を占めるようになった(図 1-1 ) .がん(悪 性新生物)は昭和 56 ( 1981 )年から死因の第1位を占め,平成 25 ( 2013 )年には 36 万 4,872 人,人口 10 万対死亡率 290.3 であり,総死亡の 28.8% を占めている.
図 1-1 主要死因別粗死亡率年次推移( 1947 年~ 2013 年)
1)公益財団法人がん研究振興財団の"がんの統計'14"
1)によると,わが国のがん死亡数
の 2014 年推計値は約 36 万 7 千人である(男性 21 万 8 千,女性 15 万) .図 1-2 に部位
別予測がん死亡数を示す.部位別の死亡数は,男性では肺が最も多くがん死亡全体の
25% を占め,次に胃(15%),大腸(12%),肝臓(9%),膵臓(7%)の順で,女性で
は大腸が最も多く( 15% ),次に,肺( 14% ),胃( 12% ),膵臓( 11% ),乳房( 9% )の
順となっている.
7
図 1-2 部位別予測がん死亡数( 2014 )
1)頭蓋内領域のがんとしては,脳・中枢神経系の原発性がんと原発性がんから転移した 転移性脳腫瘍がある.前者は男女ともに全体に対する割合は約 1 %であり,併せて 2100 名にのぼる.後者は脳腫瘍全国統計第 12 版
2)(表 1-1)によると,もっとも多いのは肺 がんで全体の 51.9%を占め,次いで乳がん,直腸がんが上位を占めている.転移性脳腫 瘍の罹患者の数,死亡者は,がん治療の成績向上と平均寿命の伸びとともに今後も増加 することが見込まれる.
表 1-1 転移性脳腫瘍の原発巣頻度(1984-2000)
2)症例 全国集計
肺がん 51.9%
乳がん 9.3%
直腸がん 5.7%
腎 / 膀胱がん 5.3%
胃がん 4.8%
腸 4.7%
頭頚部がん 3.2%
肝がん 2.1%
子宮がん 1.7%
その他 11.3%
(症例数) 13,393 例
がん対策のより一層の推進を図るため,我が国で平成 19 年 6 月に「がん対策推進基
本計画」が策定された.がん対策推進基本計画では,がんの病態に応じ,手術療法,放
射線療法,化学療法を単独あるいは組み合わせて,集学的治療として実施することが求
められている.現在頭蓋内のがんに対しては,主に手術,放射線治療,及びこれらを組
み合わせた治療が行われることが多い.放射線治療の利点としては,非侵襲的であるこ
8
と,臓器の機能形態を温存できること,外来通院治療が可能であること, QOL が改善 されることなどが挙げられる.従来頭蓋内のがんに対する放射線治療としては主に
LINAC による全脳照射が行われてきたが,近年のコンピュータ技術の飛躍的な進歩に
よって,高精度な照射方法である定位放射線治療が用いられてきている.この方法を用 いることで,転移性脳腫瘍,髄膜腫, AVM などの一部の疾患に対しては手術と同等の 効果を期待できる.
放射線治療計画ガイドライン 2012 年版
3)では,頭蓋内の小さな病変に対して細い高 エネルギー放射線ビームを用いて線量を集中的に照射する定位放射線治療を実施する ためには,下記の①から③の定義を満たす必要があり,そのためには医学物理士,放射 線治療品質管理士や放射線治療専門放射線技師がともに協力して品質管理を行う体制 が必要であると述べられている.
① 定位的手術枠を用いた方法,または着脱式固定器具を用いた方法であること.
② 患者あるいはそれに連結された座標系において照射中心を固定精度内に納めるシス テムであること.
③ 照射装置の照射中心精度が ±1 mm 以内であること.
定位放射線治療は,全脳照射と比較して周囲の正常組織に当たる線量を極力減少させ つつ,病巣には大線量を投与することが可能であり,通常直径 3 cm 以下の病変が定位 放射線照射の適応とされている.定位放射線治療は, 1 回照射の SRS と数回に分割して 照射する SRT に分類される.SRS では病変の辺縁が病理学的にも明瞭な疾患や小さな 疾患に利用される場合にはきわめて高い精度を要求され,病変の診断精度も 1 mm 以下 であるべきとされている.SRT では精度への要求は SRS よりもやや緩く,要求される 病変の診断精度も 2 mm 以下である.
定位放射線治療を実現する方法には,コバルト線源を利用した方法と LINAC を使用 した方法がある.コバルト線源を利用した頭蓋内の定位放射線治療法は Leksell らによ って提唱され,1968 年に完成形である Gamma Knife に発展し,以後急激に普及し治療 患者数が増加した
4).201 個のコバルト線源がヘルメット状の照射ヘッドに半球状に配 置されており,各線源から照射された放射線はヘルメット内の 1 点で交わるため高線量 の放射線を集中させることができる.照射位置精度を担保するために開発された定位的
手術枠の Leksell frame は,4 本のネジを持つ金属枠により患者頭部を固定するもので,
患者頭部の動きを 0.5 mm 以内に抑えて照射することが可能である.
LINAC による頭蓋内の定位放射線治療装置は,ガントリを回転させながら様々な寝
台の回転位置で照射する方法と,小型の LINAC を 6 軸ロボットアームに取り付けた照
射方法が挙げられる.これらの方法が Gamma Knife と同等の性能を得た背景には, 1970
年台に CT などに代表される画像装置が開発され,画像診断技術が飛躍的に向上したこ
とに起因する.患者固定には,定位的手術枠の Leksell frame を用いる方法と着脱式固定
9
器具の熱可塑性マスクとベースプレートで患者頭部を挟み込む方法がある.一般的に,
熱可塑性マスクとベースプレートは Leksell frame と比較して固定精度が悪いという欠 点を持つ
5).その一方で,分割を用いた SRT による治療が行えるという利点を持つ.一 般的に,病変のサイズが直径 3 cm (約 10 cm
3)より大きくなると腫瘍辺縁は線量不足 になり,放射線ビームを集中させても周辺組織への線量が増加することが多い.そのた め,直径 3 cm を超える病変に対してはより効果的に病変を制御でき且つ危険臓器のリ スクを軽減できる SRT が選択されることが多い.
1.1.2 定位放射線治療と固定精度
定位放射線治療においては,照射装置の照射中心精度について高精度に管理を行う必 要がある.機器の精度に関する因子には, CT 撮像系に関する位置精度,レーザーアラ イメントの精度, LINAC ガントリのひずみによる回転中心精度などがある.これらの 因子は,定位放射線治療を行う上で精度管理により十分小さく保つことが必要である.
一方,患者の固定位置再現性に関する因子としては,ICRU で定義された概念が定位放
射線治療を行う上で非常に有効である.
10
図 1-3 ICRU Report 62 における放射線治療で用いる体積の概念と定義
6)ICRU は Report 50 と Report 62
6)において,放射線治療で用いる簡潔な体積の概念 と定義(図 1-3)を提案し,放射線治療において患者固定精度に関する考察を行ってい る.治療計画時に必要とされる体積の概念には,① GTV,② CTV,③ PTV,④ OAR,
⑤ PRV,⑥ ITV などがある.GTV は腫瘍の進展が確認される体積,CTV は GTV に加 えて臨床的に進展が疑われる体積と定義される.PTV は治療計画において用いられる 幾何学的な概念であり,CTV に処方線量が確実に照射されるように定義する必要があ るため,すべての不確実性を考慮して決定する必要がある. PTV には,体内マージン(IM)
とセットアップマージン(SM)の 2 つが含まれる.IM は予想される生理的な動きや,
内部の基準点や対応する座標系から CTV が変化することを補償するために,CTV に 付加されるマージンである.IM は CTV の周りに非対称性に付加されることが多い.
また,ITV とは CTV と IM を含む体積として定義される. SM は治療計画時から治療
終了までを通じての位置の不確定性,及び計画時の患者体位を完全に再現できないこと
を考慮するため,それぞれのビームに付加するマージンである.つまり,CTV サイズ
と CTV 位置に対する誤差を保証するのが IM であり,照射中心に対する患者の動きを
保証するのが SM である.さらに,治療計画で設定した ITV に対し,固定精度を保証
する SM を付加したものが PTV となる. OAR はその放射線感受性が治療計画や処方
11
線量に強く影響される正常組織を示す. PRV は, PTV と同様に OAR の治療中の動き,
治療期間を通じてのセットアップの不確実性を補償するマージンを OAR に付加した ものである.
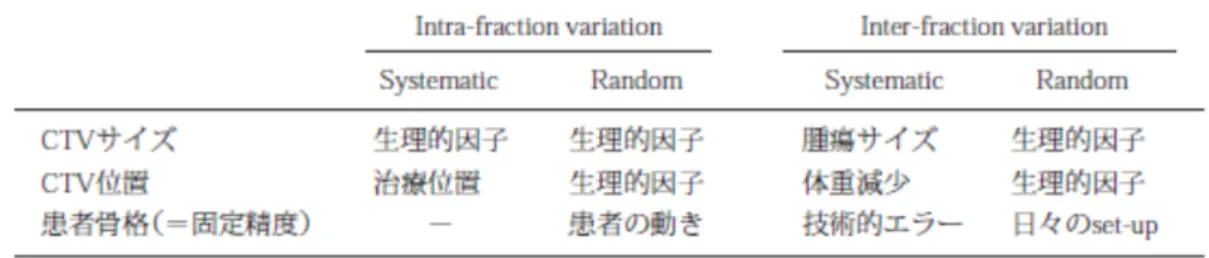
表 1-2 は, ICRU62 における PTV 決定に際して考慮すべき因子を示している
7).照射
中心に対する患者の動きは,①治療計画時に対する毎回の治療時の「患者の骨の再現性
( inter-fractional variation )」 ,②治療・照射中の「患者の骨の維持・固定性( intra-fractional variation ) 」の 2 つに大別される. inter-fractional variation とは,毎回の治療の間での変動,
すなわち,治療計画と比較して毎回の治療における再現性を意味し, intra-fractional
variation とは 1 回の照射時間内での変動を意味する.患者頭蓋骨の再現性の誤差は,治
療計画時の位置に対する毎回の治療時の位置誤差であり, inter-fraction セットアップエ ラーにあたる.患者外輪郭の維持・固定性の誤差は,治療・照射中に患者が同じ位置・
体位を保てずに動いてしまうことにより起こるもので, intra-fraction セットアップエラ ーにあたる.また, systematic component(系統的因子)は,各計測点での治療計画から のズレの平均を表し,この因子が大きいと常にずれた位置で照射されるため小さくする 努力や工夫が必要になる.random component(偶然因子)とは,各計測点におけるズレ のばらつきを表し,誤差全体への影響としては系統的因子より小さい.
近年,IGRT が定位放射線治療において広く普及している. IGRT とは,2 方向以上の 二次元照合画像,または三次元照合画像に基づき,治療時の患者位置変位量を三次元的 に計測,修正し,治療計画で決定した照射位置を可能な限り再現する照合技術である
8). 脱着可能な熱可塑性マスクを使用した頭部領域の放射線治療の場合,この技術を使用す ることにより治療毎の患者変位を限りなく 0 にすることが可能となる.したがって,頭 部領域の IGRT においては inter-fractional variation をほとんど考慮する必要がなく,主に intra-fractional variation を管理すればよい.すなわち,今後更なる高精度放射線治療を実 施するためには,intra-fractional variation の低減が必要になる.
表 1-2 ICRU62 における PTV 決定に際して考慮すべき因子
7)12
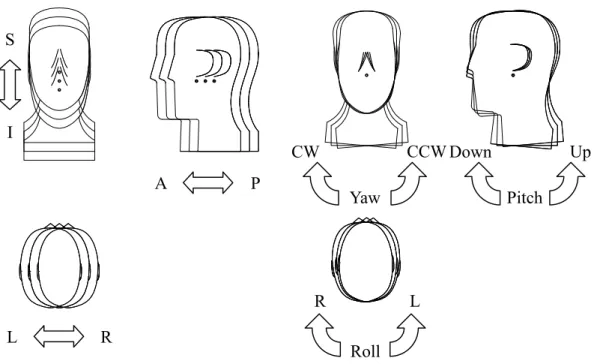
図 1-4 頭部の 6 軸変位の定義.矢印は,患者の位置及び角度変位の方向を示している.
I は Inferior,S は Superior,A は Anterior,P は Posterior,R は Right,L は Left,Up は head up,Down は head down,CW は時計回り,CCW は反時計回りを示す.
当院で行っている Cybeknife 装置(アキュレイ社製)による頭部定位放射線治療では,
TLS による IGRT が可能である
9).TLS とは, CT 像から作成された DRR と治療中に 2 方向で撮影された X 線画像とを比較し, CT 原点からの移動距離, 回転角度を自動的に計 算する画像照合システムである.天井に設置された 2 台の X 線発生装置と,床面に設 置した 2 台の aSi ディテクタ(512×512 pixels,16-bit acquisition)を装備している.TLS は 2 つの画像の中心で定義される Imaging Center を頭蓋上部および鼻骨が投影範囲に入 るよう設定することで,頭蓋骨辺縁の輪郭を基に患者頭蓋変位を計測する装置である.
算出された並進変位,角度は 1)Inferior – Superior,2)Right-Left,3)Anterior-Inferior,
4)roll,5)pitch,6)yaw の 6 軸で表される(図 1-4).
算出された並進変位,角度は,LINAC を搭載したロボットアームによってビームを 照射する前に自動的に補正される.当院のシステムでは,治療中最短約 30 秒間隔での 位置照合が可能なため,Intra-Fractional Motion を大幅に低減できる.しかし,熱可塑性 マスクや枕を用いた固定具では,Intra-Fractional Motion を 2 mm 以下に抑えることは困 難である
5).さらに,透視-透視間の患者位置情報は取得できないため Intra-Fractional Motion を完全に排除できない.位置照合間隔を短くすることで Intra-Fractional Motion を減少できるが,その一方で画像照合に伴う被ばく線量の増加に繋がる.
Yaw Pitch
Roll L R
Down Up CW CCW
L R
S
I
A P
13
1.1.3 定位放射線治療における Intra-Fractional Motion
頭蓋内定位放射線治療における Intra-Fractional Motion には,嚥下,呼吸に伴う動き,
不意な動きなどが挙げられ,これらの動きを照射中に抑制する器具が必要になる.また,
治療中に蓄積する患者の疲労を軽減するため治療時間を短くする工夫が必要である.
頭部変位抑制のためには,近年に広く用いられている脱着可能な熱可塑性マスクとア クリルベースプレートで頭部を挟み込む固定具がある.当施設では,同様の固定具を使 用して IGRT による頭部領域の定位放射線治療を行っている.この方法は,金属フレー ムとネジによって頭蓋骨を固定する Leksell frame と比較して次のような利点と欠点を 持つ
5).
利点:外科的な手技と費用が不要,傷のリスクが無く脱着が容易,感染等の医学的な問 題が無い,複数回治療を行う SRT に適している,患者にやさしい,作製が容易.
欠点:固定精度が悪い (2 mm vs. 1 mm) .
マスクとベースプレートを使用した患者固定では,治療中 1 mm 以上の変位が生じた 報告例がいくつか存在する
10-14).以下に代表的な報告例を示す.Saito K ら
10)は,
Intra-fractional Motion を継続的にモニターでき,一定の範囲を超えた時に治療を停止す
るシステムを開発した.熱可塑マスクの表面に糸を取り付け,エンコーダーと繋ぐこと で患者の動きを 1 秒間に 30 回検出することができる.TLS で位置照合を行ってから次 の照合を行うまでの間における患者の動きは, 1 秒程の間に数 mm 生じることもあった.
Verbakel ら
11)は, ExacTrac システム(Brain Lab 社製)と Gill–Thomas–Cosman フレー ムと熱可塑マスクによる Intra-fractional Motion の解析を行った.Intra-fractional Motion は,0.35±0.21 mm,最大 1.15 mm であった. Murphy ら
12)は,Cyberknife による 1-2 分 間隔での患者位置の 6 軸誤差を取得し解析を行った.モールド枕と熱可塑マスクで固定 した 250 ケースについての患者変位は, Inferior-Superior, Posterior-Anterior 及び Right-Left 方向で平均 0.45mm であった.250 治療中 146 治療において 2 mm を超える変位があっ た.
Hoogeman ら
13)は,Cyberknife 治療における患者の Intra-fractional Motion と時間の関 係を調査している.厚さ 2 mm の熱可塑マスクと枕(Sinmed BV 製)を使用して頭頸部 治療を行った 32 名の患者について調査した.TLS 照合間隔が 1 分以上になると 1 mm を超える変位があり,また,照合間隔 2 分における最大変位は 4.3 mm であることが示 された. Ramakrishna ら
14)は,侵襲性を伴うフレームシステムと熱可塑性マスクと IGRT を用いた時の Intra-fractional Motion を比較している. RMS と 1 mm 以上の変位が生じた 割合は,フレームシステムで 0.4±0.3 mm 及び 4%で,熱可塑性マスクと IGRT で 0.7±
0.5 mm 及び 22% であった.
14 1.1.4 Real-Time 検知装置
現在いくつかの Real-Time 検知装置が開発されており,以下にこれまでの代表的な報 告例を示す
15). Optical tracking は,紫外線,可視光,赤外線信号をカメラで捉えること で被検物の動きを検出することができる. Optical navigation は脳外科,整形外科などで 普及し始め,放射線治療においても用いられるようになった.このシステムは graphical user interfaces により Real-Time に被検体の動きを可視化することができる.さらに CT シミュレーション時の位置と比較が可能であり,患者の関心部位に光学マーカを設置す ることで被ばくを伴わず Intra-Fractional Motion の検知が可能である
16).幾何学的な精度
は 1-2 mm と言われているが,体内ターゲットの動きとマーカを設置した表面の動きが
一致しているときのみ使用可能という制約がある
15).
Peng ら
17)は,被ばくを伴わないシステムである Align RT ( Vision RT 社製)を用い た頭部における有用性を示しており, XVI ( Elekta 社製)の kV CBCT system と frameless SonArray(FSA,Varian 社製)の optical tracking system とで比較を行った.患者に特別 な装置を装着することなく,天井に装備した 3 台のカメラで 0.1 - 0.3 回/秒の画像取得 が可能であった.XVI 及び FSA と比較すると,ファントム検証において Align RT は並 進誤差,回転誤差はそれぞれ 1.3 mm 以下,0.8°以下であり,実際の患者ではそれぞれ 0.3 mm, 0.2°であった.同様に Align RT を用いた報告として, Cerviño ら
18)は新しいタ
イプの Head Mold(CDR System ,Inc.)のボランティア検証を行っている.被験者を 20
分間固定し,その最大変位を 3 台のカメラで構成される Align RT で観察しており,結 果は Posterior-Anterior,Inferior-Superior,及び Right-Left 方向で 0.6 mm,0.7mm,及び 0.4mm であり,RMS は 1.1 mm であった.
Takagi ら
19)は,セットアップの精密さを向上させるため, “body surface navigation and Monitoring System” (Navi-system)を開発した. Navi-system は, Light Emitting Diode (LED)
プロジェクタ,Charge-Coupled Device(CCD)カメラ,パーソナルコンピュータで構成 されており,被ばくを伴わないシステムである.LED プロジェクタによって 19 本の縦 線を患者表面に投影し,CCD カメラで撮影して患者変位を計測した.Navi-system は,
Real-Time で患者表面の高さを計算し,リファレンスと比較することで患者変位を検知
することができ,0-10 mm の患者変位に対して 1 - 1.5 mm,11 - 20 mm の患者変位に対 しては 1.5 - 3 mm の誤差であった.
Li ら
20)は,video-based optical surface imaging (OSI)を使用して,SRS におけるセット
アップ時の寝台の傾き補正及び Intra-Fractional Motion を検知した. OSI system は 3 台の 天吊り型のカメラを使用しており,1 秒間に 2 回の照合が可能である.ファントム試験
での OSI system の精度は,1 軸に対して 0.1 ± 0.1mm であった.許容値を超える患者の
動きを監視する上で本システムは有用であった.
Magnetic Resonance Imaging ( MRI ) -Guided IGRT
21)は,被ばくを伴わず軟部組織の構
造とその動きを Real-Time に鮮明に撮影することで, Intra-Fractional Motion を検知する
15
ことが可能である.検出精度は 1 - 2 mm である.しかし, MRI には動きによるアーチ ファクト,不均一磁場によるねじれなどの欠点があり,またペースメーカや体内に金属 を埋め込んでいる患者には使用できない. MRI は brachytherapy においてアプリケータ の位置確認などに使用されているが,それ以外にも脳,肝臓,前立腺などの IGRT に利 用されている
15).
超音波を使用した IGRT
22)は被ばくを伴わないシステムとして,主に日々のセットア ップに対して使用されており,現在 B-mode Acquisition and Targeting ( Best Nomos 社製)
及び Clarity system ( Elekta 社製)による胸部と前立腺治療などの軟部組織に対して用い
られている. Clarity system は前立腺の Intra-Fractional Motion を検知できるまでに発展し ている
15).
EPID は,フィルムの代替として開発され,現在はほとんどの LINAC に装備されてい る.位置照合以外に照射野確認と QA に使用されている.位置照合においては,シミュ レーション時の CT 画像から再構成された DRR との骨構造による 2 次元比較によって,
2 mm 以内の精度で可能である. EPID は,照射ビームを利用した画像取得のため 2 次元
の Real-Time 検知が可能である.しかし,画像コントラストは MV-X 線のため kV-X 線
よりも劣る.被ばく線量においては,kV-X 線が 1 画像当たり 1 - 3 mGy に対し,MV-X 線では 30 - 70 mGy になる
23–25).Artiste (Siemens 社製)は,回転しながら画像を取得す ることで CBCT を撮影することができる.
CBCT は,収納可能な kV-X 線管と aSi ディテクタから構成され, Real-Time 検知はで
きないが,照射前後の撮影で両者を比較することで,Intra-Fractional Motion を推定可能
である.また,ガントリを 1 回転あるいはハーフ回転で連続的に画像を取得し,呼吸性
移動のある臓器の平均的な位置情報を得る.幾何学的精度は,治療計画時の CT 画像か
ら再構成した 3 次元 DRR 画像との比較で,1 mm 以下の位置精度が可能である.CBCT
は,正常組織周囲のがん組織を識別できることから治療効果の判別にも有用で,日々取
得した画像を利用して線量分布の再計算も可能になってきている.kV-CT は MV-CT に
比べコントラストは高いが金属アーチファクトに弱い欠点がある.被ばく線量は1画像
当たり 30 – 50 mGy である
26–29).
16
図 1-5 Varian 社製 CLINAC iX. EPID と On Board Imager (OBI)を各 1 台装備しており,
OBI を用いた CBCT を撮影することが可能である.
Real-Time Tumor-Tracking (RTRT) System(島津製作所製)は,患者体内に埋め込んだ
Fiducial マーカにより同期照射のための位置情報を取得できるよう設計されている.床
面には 4 台の X 線管を,天井には Image Intensifier を設置している. LINAC はアイソセ ンタを基準とした許容値内にマーカが検知された時のみ同期照射を行う
30,31).
Vero4DRT(三菱重工社製)は,2 つの X 線管と Flat Panel Detectors を備え,2 方向の 照合画像を用いて位置合わせを行う.治療計画時の CT による DRR と 2 方向の X 線照 合画像を用いて骨照合を行い,6 軸の患者変位を求める.また,臓器の動きを補償する ことも可能である
32).さらに,1 台の EPID も搭載しており照射ビームを利用して金属 マーカをモニタリングする.
Accelerometer-based Patient Orientation Monitoring System (APOMS)は,治療中の患者の
角度変位を検知する.小型のワイヤレス加速度センサを体表面に置き,コンピュータと
接続した中継局でその検出角を受信する.しきい値を利用した計算方法が開発され,患
者頭部の角度変位を正確に同定することが可能である.もし,あらかじめ設定したしき
い値を超える角度変位が検出されると警告音が鳴る.高精度な測定が可能で,低コスト
で取り扱いが簡単であり,被ばくがない,使用に際して特別な知識を必要としないなど
の利点を有する
33).
17
1.1.5 定位放射線治療に要求される固定精度管理
AAPM の Task Group 142 では, IGRT を用いた SRS 及び SBRT における画像及び治療 位置は 1 mm 以内の一致で実行されるべきであると明記されている
34).また, AAPM の Task Group 135
35)では, Cyberknife における中心位置精度は End to End テストによっ
て 0.95 mm 以内で管理されるべきと明記されている.臨床面においては, Treuer ら
36)が,
標的が 1.3 mm ずれると局所制御率に悪影響を及ぼすことを報告している.実際の臨床
においては, Yamazaki らの報告
37)にあるように頭蓋内定位放射線治療では, CTV に対
して 1 – 2 mm の PTV マージンを設定しており,当院においても同様の PTV マージンを
設定することが多い.仮に TPS の線量計算誤差を含めなければ, Intra-Fractional Motion は臨床効果を担保するための位置精度( 1.3 mm )と PTV マージン( 1 - 2 mm )から装置 の中心位置精度を差し引いた範囲で管理する必要がある.つまり,頭蓋内定位放射線治 療においては Intra-Fractional Motion は 2.3 mm 以下で管理する必要がある(表 1-3 ) .
表 1-3 画像誘導を用いた頭蓋内定位放射線治療における不確定性と PTV マージン
① 装置の中心位置精度 ≤ 1.0 mm
② 臨床効果を担保するための位置精度 ≤ 1.3 mm
③ PTV マージン 1 - 2 mm
Intra-Fractional Motion の許容範囲 ≤ ③+②‐①
( ≤ 2.3 mm )
照合間の患者動きを抑制する方法として,固定精度の高い固定具を使用することが挙 げられる.現在のところ固定具の精度は臨床患者或いはボランティア検証での変位で示 すことが多く,他に固定精度を客観的に示す指標はない.臨床患者によって固定具の固 定精度を検証した場合,現状よりも治療精度が悪化するリスクを伴う.一方,ボランテ ィアを用いた検証
18, 38, 39)では臨床と同様に検証が行えるが,時間と労力を要すこと,
被験者は通常健常者が多いため実際の治療患者とは異なる傾向を示すなどの問題点が 予想される.例えば,臨床患者或いはボランティア検証ではなく,ファントム検証が可 能であれば,予め固定精度の高い固定具を選定することができ,また固定精度の高い固 定具開発に有用である.さらに,被検者特有の誤差を含まない客観的なデータを得るこ とができ,時間と労力も最小限に抑えることができる.
また,頭蓋内領域における定位放射線治療において,既存のシステムでは照合間の動
きを Real-Time に捉えることができないこと,マスク上に取り付けたマーカと頭蓋の動
きが一致しないこと,或いは評価点が照射中心と異なることなどにより,患者の
Intra-Fractional Motion を正確に評価することは困難である.さらに,X 線を使用したシ
18
ステムでは被ばく線量の増加も懸念される.そのため,被ばくが無く照射中心の変位を
Real-Time で検知できる装置の開発が望まれる.
加えて,患者の形状に添ったマスクと枕を使用すると,密着性がよくなり固定精度が 高くなるという報告がある
40-42).しかし,固定精度を良くする適切な固定力についての 詳細な報告はなく,固定精度を向上させる管理方法は示されていない.後頭部と固定具 間の接触圧力と固定精度の関係が定量的に把握できれば,より高精度な患者固定に向け た具体的な対策に対する有益な情報を得ることができると考えられる.
以上の理由から,本研究では定位放射線治療における Intra-Fractional Motion の低
減を目的とした頭部固定具の固定精度検証システムを開発した.本システムは固定具の
固定精度検証ファントム,患者変位を Real-Time に捉えることのできる検知装置から
構成され,本システムを用いて頭部圧迫が頭部固定マスクの固定精度に与える影響につ
いて定量的な解析を行い評価した.
19 1.2 本研究の概要
非侵襲的な固定具を用いた頭蓋内定位放射線治療では 1 - 2 mm の固定精度が要求さ れる.画像誘導放射線治療の開発によって Inter-Fractional Motion の補正が可能となった 現在では, Intra-Fractional Motion の低減が重要となってきている.本研究では,
Intra-Fractional Motion の低減を目的に 2 つのツールを開発し,これらを用いて頭部固定 の圧力管理による Intra-Fractional Motion 低減の可能性について評価した.まず,固定具 の固定精度を定量的に評価するファントムを開発し,次に X 線による被ばくを伴わな い Intra-Fractional Motion を Real-Time に検知可能な装置を開発した.開発したファント ムと検知装置を用いて,頭部圧迫による高精度な患者固定の実現を目指して,頭部圧迫 による固定精度への影響について解析した.
Intra-Fractional Motion を抑制する方法として,固定精度の高い固定具を使用すること
が挙げられる.固定精度を検証する方法として,ボランティアによる検証が広く行われ ている.ボランティアによる検証では,実際の治療と同様な検証は可能であるが,時間 と労力を要し,また被験者は健常者の場合が多く臨床患者と状況が異なる.本研究で提 案するファントムを用いた固定精度の検証では,一定方向から荷重をかけることで患者 変位を再現することができ,被験者に依存しない客観的で定量的な評価が可能となり,
時間と労力の最小限化につながる.
本 研 究 で 開 発 し た 圧 力 セ ン サ を 用 い た 検 知 装 置 は , 現 在 用 い ら れ て い る
Intra-Fractional Motion を検出する装置と比較して,次のような利点がある.①被ばくが
無い,②サンプリング速度が速い,③測定原理が単純,④設置が容易,⑤自己吸収が少 ない,⑥安価,⑦薄型且つ小型,⑧測定が簡単,などである.また,TLS による間欠的 照合に対し,継続的に治療中の動きを検出することができる.圧力センサによって不意 な動きが検出された時には,手動で LINAC に供給される高電圧を遮断して治療を一時 中断し,再度 TLS によって位置照合,補正を行い,照射を再開する.このように, TLS と圧力センサによる Intra-Fractional Motion 検知装置を併用することで,不正確な照射を 防ぐことができ,さらに TLS 照合間隔を広げることで被ばく低減が可能になる.
熱可塑性マスクを用いた頭部固定では,患者の形状に合ったマスクと枕を使用すると
密着性がよくなり固定精度が高くなることが報告されている
40-42).しかし,固定精度
と最適な固定圧力の関係については詳細に報告されていない.本研究では,固定具と頭
部の密着性に注目し,ファントムによる後頭部と固定具間の接触圧力と固定精度の関係
を明らかにした.後頭部と固定具間の接触圧力と固定精度の関係を定量的に評価するこ
とで,より高精度な患者固定が実現できる.
20 1.3 本研究の構成
本論文は全 4 章より構成されている.
第 1 章では,本研究の背景,本研究の概要,本論文の構成について述べた.
第 2 , 3 , 4 章では,著者がこれまで研究してきた内容とその成果をまとめた.
第 2 章では,ファントムの材料,構造,作製方法,評価方法,及び臨床で使用してい る 3 種類のマスクの検証結果を示した.ポリエステル,紙粘土,及び紙で作製したファ ントムには,内部に合成樹脂性パイプを Posterior-Anterior , Right-Left 方向に挿入してお り,外部から引っ張ることで治療中の患者変位を再現することができる. 15 名の臨床 データに基づき固定精度検証時のファントム変位を求め,荷重ごとのファントム変位を 測定した.
第 3 章では, Real-Time Intra-Fractional Motion 検知装置の概要,原理,臨床における バネ定数の決定,本装置の性能評価,及び臨床での使用例を示した.本装置は, 4 つの 圧力センサ,吸引式枕,マスク,ベースプレートで構成され,患者にかかる荷重と吸引 式枕の変位に Hook の法則が成り立つことを利用し患者変位を測定した.初めに,Hook の法則における吸引式枕のバネ定数を 19 名の患者の X 線画像による 2999 回の照合デー タと圧力との比較によって求めた.次に,データの真偽分類を示した混同行列を利用し て,システムの Sensitivity,Specificity,及び Accuracy を求めた.さらに,本装置と TLS を同時に使用した場合の被ばく線量の低減率を理論計算により推定した.
第 4 章では,第 2 章で開発した固定精度検証用ファントムと第 3 章で開発した装置に 接触圧力の制御機能を付加したベースプレートを用いて,接触圧力を変化させた時の頭 部固定マスクと枕の固定精度を検証した.
第 5 章では,本研究のまとめと今後の課題について述べた.
21
第 2 章 固定具の固定精度検証用ファントムの作製
2.1 緒言
頭蓋内治療において,脱着可能なフレームレスシステムは取扱いが便利な反面,患者 固定の面で侵襲的なフレームシステムに比べて劣る.前者の固定位置精度はおよそ 2 mm に対して後者は 1 mm 以下である
5).この欠点を克服するために現在まで多くの研 究がなされている
.40, 43-48).近年, IGRT を使用したフレームレスシステムの報告が盛ん に行われており
10-11, 13, 38, 39, 49),高精度放射線治療において固定精度を担保できる方法と して主流になりつつある. IGRT はきわめて正確な固定精度を担保できるが,現段階で はフレームシステムと同等の固定精度には至っていない. Ramakrishna ら
14)は,フレー ムシステムを使用した時の Intra-Fractional Motion が 0.4 ± 0.3 mm (平均値±標準偏差)
であり,フレームレスシステムと IGRT を使用した時の Intra-Fractional Motion が 0.7 ± 0.5 mm(平均値±標準偏差)であったと報告している.
当院で行っている Cybeknife 装置による頭部定位放射線治療では, TLS を用いた IGRT によって
9),治療中最短約 30 秒間隔で位置照合が可能で,Intra-Fractional Motion を大 幅に低減することができる.しかし,Cyberknife 装置においても 1 mm を超える Intra-Fractional Motion が検知された報告例があり
10, 12, 13),頻繁に位置照合を行っても 1 mm 以上の Intra-Fractional Motion を完全に排除することは困難である.さらに,透視- 透視間の患者位置情報は取得できないため,その間に生じた Intra-Fractional Motion は排 除することはできない.Intra-Fractional Motion を低減するためには,より固定精度の高 い固定具の使用が必要である.当院においては,フレームレスシステムとして主に U フレームマスク(Klarity Medical & Equipment 社製)と発泡スチロール枕或いは吸引式 枕(エンジニアリング社製)を使用しているが,個々の固定具が固定精度に及ぼす影響 について定量的に把握できていない.固定具の精度検証として,ボランティアによる検 証を行った報告がある
38, 39).ボランティアによる検証では実際の治療と同様の検証が 行えるが,時間と労力を要し,また被験者は健常者が多いため臨床患者と状況が異なる.
本章では,ボランティアを必要としない固定精度検証用ファントムを開発した.本フ
ァントムは,3 方向からの荷重によって患者の Intra-Fractional Motion を再現し,ファン
トム変位は TLS によって計測される.荷重と変位の関係を求めることで,固定具の固
定精度を測定することが可能となる.荷重に対する変位が小さいほど固定精度は高くな
る.本ファントムを用いた頭部固定具の精度検証によって,被験者に依存しない客観的
なデータを取得でき,時間と労力を最小限に抑えることができる.また,本手法で検証
した固定精度の高い固定具を臨床使用することで, Intra-Fractional Error を最小にするこ
とが可能になる.
22 2.2 方法
2.2.1 固定精度検証用ファントムの材料,構造,作製方法
固定精度検証用ファントムは,当施設において End to End Test
35)に使用している
SHIELA ファントム( Accuray 社製)を参考に,以下の条件を具備するように作成した.
(1) 頭部用固定具の検証を行うため人頭形状である.
(2) ファントムを外部から引っ張るため,内部に紐を通すことのできる穴がある.
(3) TLS で頭蓋骨照合を行うため,頭蓋を模した人工骨がある.
(4) 変形,破損しない.
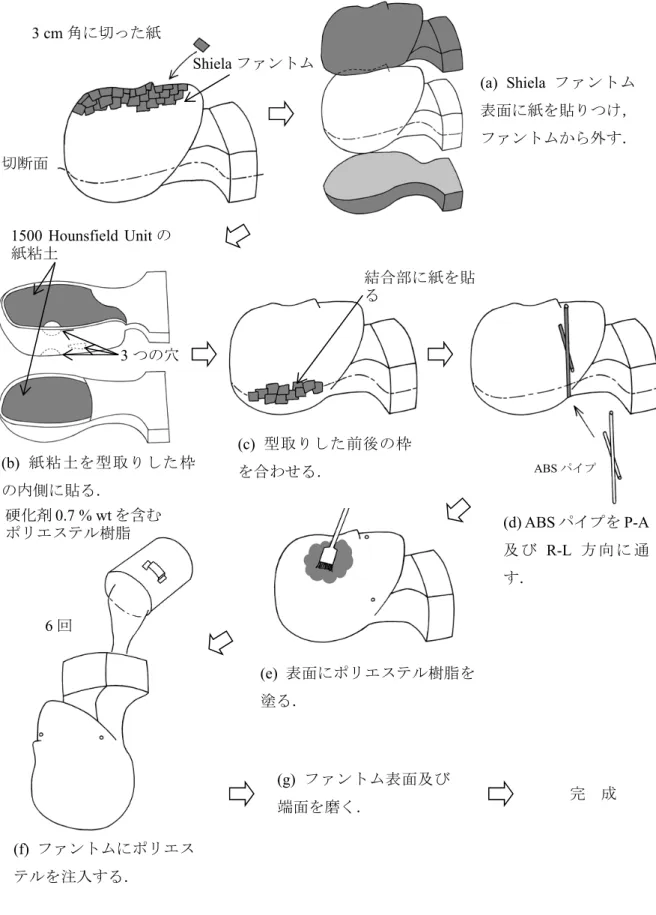
作製工程を図 2-1 に示す.最初に, 3 cm 角程度に裁断した紙を SHIELA ファントムの 表面にデンプンのりを用いて隙間無く貼りつけ乾燥させた.ファントムの前後それぞれ について最大 1 mm の厚みになるまで紙を貼りつけ外形を作製した.次に,作製した外 形の内側に CT 値約 1500 Hounsfield Unit の紙粘土を貼りつけた. TLS の位置検出精度を 担保するため,眼窩に 2 ヵ所,鼻骨付近 1 ヵ所の計 3 箇所に空洞を設けた.さらに,前 後 2 つの外形を合わせて,合わせ面に紙を使用してデンプンのりで接着し,内側からは 隙間ができないように紙粘土を貼った.ファントムには一定荷重を加える際,内部に紐 を通せるように Posterior-Anterior 方向および Right-Left 方向に,外径 6 mmφ,内径 4 mm φの Acrylonitrile Butadiene Styrene(ABS)パイプを通した.次に,0.7 %wt の硬化剤を 混ぜた硬質ポリエステル樹脂を表面に塗布し強度を増した.ポリエステル樹脂が十分に 硬化した後,頭頂部を下にして作製した外枠を固定し,変形やひび割れを防ぐため計 6 回にわけてポリエステル樹脂を注入した.最後に,表面および端面が滑らかになるよう にサンドペーパーにより研磨した.作製したファントムは,Posterior-Anterior 方向およ
び Right-Left 方向に設けた 6 mmφの ABS パイプの穴に紐を通す事によって一定の荷重
を加え,患者変位を再現することができる.
2.2.2 Target Locating System によるファントム変位の検出精度
作製したファントムと Cyberknife 装置の TLS を用いて位置検出精度の検証を行った.
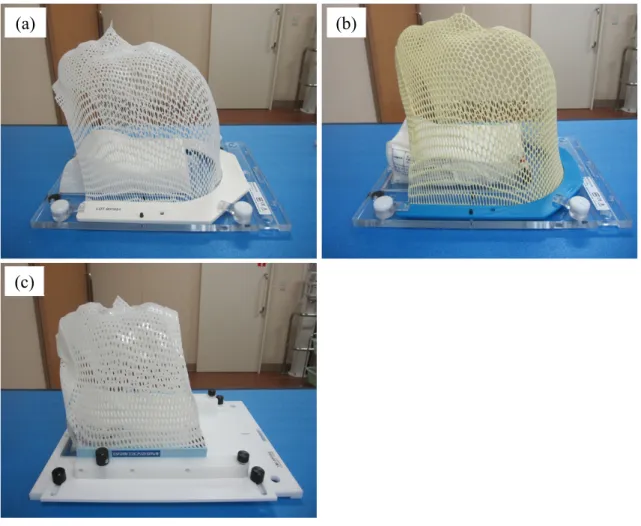
ファントムの熱膨張を一定にするため,ファントムが室温と同じになるよう治療用 CT 室で 12 時間保管した.初めに,枕をセットしたアクリルベースプレート上にファント ムを置き,加温器で 70℃,約 30 分間の加温をしたマスクをファントム表面に密着させ 賦形した.次に,ファントムを CT 撮影し,TLS 照合を組み込んだ治療計画を立てた.
CT には SOMATOM Sensation Open (Siemens 社製)を使用した. TPS は On Target Version
3.4.2 を使用し,照合画像にファントムの頭頂部および眼窩が入るよう画像中心を設定
した.ファントムは Cyberknife 治療寝台にセットしたアクリルベースプレート上に置き,
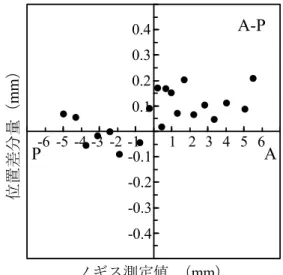
賦形したマスクを被せた. TLS 照合による位置変位は, 0.03 mm の精度を有するノギス
23
を Cyberknife 装置のガントリに固定し,ノギスの測定子をアクリルベースプレートの辺
縁に接触するように配置して得られた測定値と比較した(図 2-2 ) .ベースプレートとフ ァントムは,固定具により強固に固定されているため両者の変位量は一致する.寝台を Inferior-Superior , Right-Left ,及び Posterior-Anterior 方向について, -5.0 mm から +5.0 mm まで 20 ポイント移動し, TLS 照合とノギス測定を行った.
2.2.3 Target Locating System による固定精度の評価
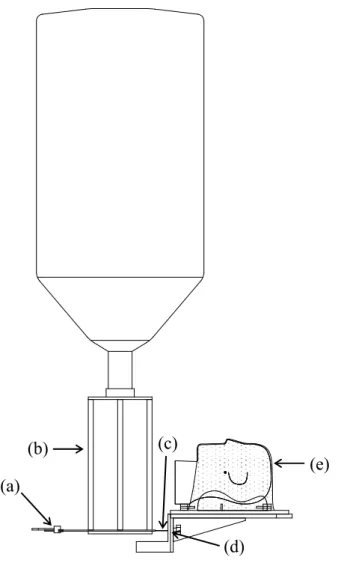
臨 床 に お け る 治 療 中 の 患 者 の 動 き を 再 現 す る た め , 作 製 し た フ ァ ン ト ム に Inferior-Superior , Right-Left ,及び Posterior-Anterior 方向に荷重をかけ, TLS によってフ ァントム変位を測定した.手順として,まず固定具の固定精度を評価するために,ファ ントムに対してそれぞれ臨床と同じ方法で固定具を作製し, CT 撮影を行った.次に,
ファントム変位を TLS 照合で検出するために,撮影した CT 画像を治療計画装置に送信 し,治療計画を作成した.作製した固定具を用いてファントムを寝台に固定し,ファン トムに設けた ABS パイプの中に紐を通しておもりに繋いだ(図 2-3) .荷重毎にファン トム変位を安定させるために 5 分ほど時間をおいて, 3 回 TLS 照合を行い,その平均値 を記録した.また,軽い荷重から重い荷重へと変化させて測定を行った.荷重を加える 方向は, Inferior から Superior, Posterior から Anterior, Right から Left とした.最終的に,
Cyberknife 装置から TLS 照合結果を取り出し,荷重とファントム変位の関係をグラフで
表して傾きを求めた.
24
図 2-1 固定精度検証用ファントムの製作工程. ABS は Acrylonitrile Butadiene Styrene , P-A は Posterior-Anterior 方向, R-L は Right-Left 方向を表す.
(a) Shiela ファントム
表面に紙を貼りつけ,
ファントムから外す.
(b) 紙粘土を型取りした枠 の内側に貼る.
(c) 型取りした前後の枠 を合わせる.
(f) ファントムにポリエス テルを注入する.
(g) ファントム表面及び
端面を磨く. 完 成
(d) ABS パイプを P-A
及 び R-L 方 向 に 通 す.
(e) 表面にポリエステル樹脂を 塗る.
硬化剤 0.7 % wt を含む
ポリエステル樹脂
6 回
3 cm 角に切った紙
切断面
1500 Hounsfield Unit の 紙粘土
3 つの穴
結合部に紙を貼 る
ABSパイプ