博士論文
森林性哺乳類を対象とした長寿命な GPS テレメトリシステムに関する研究
2013 年 8 月
熊本大学大学院自然科学研究科
森下 功啓
審査委員
内村圭一 教授 杉谷賢一 教授 趙華安 教授 北須賀輝明 准教授
i
論文要旨
本研究では、ニホンジカなどの測位システムの構築が困難な森林性哺乳類を対象とし たGPSを用いた野生動物の行動調査デバイスにおいて、無線ネットワークと、GPS受 信機の効率的な運用方法と、気圧センサを用いたGPSによる測位の補間によって、行 動調査システム全体としての利便性と省電力性および観測情報の量と質を向上させる ことを目的としている。
近年、日本国の山林及び農村においてニホンジカやニホンザル,イノシシによる農林 業被害が増加しており、長期間に渡り効果が持続する被害対策や持続可能な生息頭数の 制御方法が模索されている。最近では、GPSを利用したGPSテレメトリと呼ばれる野 生動物の生態調査が行われている。GPS テレメトリによって大量の高精度な測位情報 が得られるようになったが、主に 3 つの課題を残している。1 つ目の課題は、GPS テ レメトリにおける調査の省力化である。既存の手法では、定期的なモニタリングのため に調査者が山に分け入る必要がある上に、山中に落下させた観測装置を歩いて探す必要 がある。従って十分な個体追跡数の確保が難しく、被害対策の定量的評価を妨げている。
また、同時に多数の個体を追跡することでこれまで知られていなかった性質が明らかに なると期待されているが、実現できていない。2つ目の課題は、GPSによる測位回数の 向上である。GPS 受信機の測位に要する電力量が大きいために、既存の手法では行動 学的な分析を行えるほど頻繁な測位を行うと数日~1ヶ月でバッテリ切れとなる。3つ 目の課題は、測位できる領域を拡大することである。既存のGPSテレメトリでは、密 生した樹木や谷間地形が衛星から発信された測距信号を遮蔽する影響で測位できない 領域が存在しており、これが正確な生態分析の妨げになっている。従ってこれまでの研 究で明らかにされたことは行動面積や季節移動の有無にとどまっており、より詳細な調 査が望まれている。本研究ではこれらの課題に対し、1) 無線ネットワークの適用,2) GPS受信機の起動タイミングと観測間隔への工夫,3) GPSを補間する測位方法を提案 する。
第1章では、まず研究背景について述べると共に、研究対象とする野生動物の概要と 生息環境の特徴および対象動物によって必要とされる測位システムの違いについて述 べた。
第2 章では、GPS テレメトリを省力化することを目的とし、無線による測位情報の 自動的な回収の提案と、それを実現するハードウェアの消費電力について検討した。実 験の結果、電源やRAMの保持に要する電流において既存の研究が約119 µAであるの に対して本研究で設計した電子回路は約10 µAであり、10分の1以下であることを確 認した。また、1年程度の観測が可能であることを示した。加えて、GPS受信機の測位
ii
実験の結果から、測位完了後に一定期間測位を持続することとで測位精度を向上できる ことを示した。
第3章では、消費電力量を増やすことなくGPSの測位回数を増加させることを目的 とし、GPS の測距信号仕様を考慮した測位スケジューリングについて検討した。これ まで、GPS の仕様にまで踏み込んだ運用方法について触れた研究はほとんど発表され ていない。実験の結果、GPS受信機の起動タイミングによって、実験に用いたGPS受 信機では、5秒以上長く起動させたとしても測位の成功率に4ポイントの差が出ること を確認した。また、GPS 受信機の測位間隔とホットスタートの割合を予想するプログ ラムを開発し、GPS テレメトリにおいて最適な測位間隔を明らかにした。シミュレー ションの結果、九州の緯度では、GPS受信機の電源をON/OFFする間隔が2時間まで は測位が早く終了する割合が線形に減少し、2時間 45 分以降になると急速に測位性能 が悪化し、3時間では測位環境と起動タイミングによる影響が大きいこと、および測位 間隔を3時間より長くしても消費電力量を減らすことができないことを示した。なお、
九州以北では可視衛星数が減少するためホットスタートの割合が小さくなると考えら れるものの、九州以南も含めてほぼ同様の傾向と考えられる。
第4章では、山林におけるGPSの測位を補間することを目的とし、気圧高度とデジ タル標高モデルを組合わせることで野生動物の移動経路を推定する方法について提案 した。ここで、気圧高度とは気圧を用いて推定される標高などの高さである。本研究で は固定の大気観測局を基準とすることでGPSの単独測位に比べ高精度な高さを求めら れること、およびこれまで全く不明だった測位点間の移動経路を推定できるケースがあ ることを示した。例えば、九州の九重連山において移動実験を行った結果、2時間に渡 る移動経路を推定できた。
第5章では、本研究についてまとめた。また、本研究で製造したGPS首輪の近代化 について述べた。最後に、今後の研究の方向性として、GPS の仕様に踏み込んだ更な る議論のためにGPS受信機の内部状態をシミュレートできるソフトウェアGPS受信機 を用いた実験について説明した。
iii
目次
1. 序論 ... 2
1.1. 研究の背景 ... 2
1.1.1. 獣による農林業被害とニホンジカによる森林の荒廃 ... 2
1.1.2. これまでに明らかにされているニホンジカの生態... 3
1.1.3. GPSテレメトリによる調査 ... 4
1.2. 従来の研究 ... 8
1.2.1. 観測情報の無線伝送による省力化 ... 9
1.2.2. 測位回数向上のための省電力化手法 ... 10
1.2.3. 測位できる領域の拡大 ... 12
1.3. 近年の技術動向 ... 13
1.3.1. GNSS測位衛星の増加 ... 13
1.3.2. センサネットワーク向け920 MHz帯の解放 ... 13
1.4. 本研究の目的 ... 14
1.5. 本論文の構成 ... 14
1.6. 第1章の参考文献 ... 15
2. 無線ネットワークを利用した GPS テレメトリ観測システムの開発 .... 18
2.1. 目的 ... 18
2.2. 評価方法 ... 18
2.3. 提案システムの概要 ... 19
2.4. 固定局の設置スタイル... 20
2.5. 回路設計 ... 21
2.5.1. 基本構成 ... 21
2.5.2. GPS首輪の基本動作 ... 21
2.5.3. 電源電圧 ... 22
2.5.4. 省電力化のための基本設計 ... 22
2.5.5. 回路図および細かい設計点 ... 23
2.5.6. 無線モジュール ... 26
2.5.7. GPS受信機 ... 27
2.5.8. マイコン ... 30
2.5.9. バッテリ ... 32
2.6. パターン設計 ... 34
2.7. 電子回路の製造 ... 35
2.8. ソフトウェア設計 ... 37
iv
2.8.1. 概要 ... 37
2.8.2. AVRマイコンの省メモリへの配慮 ... 38
2.8.3. ATmega1284Pマイコンの省電力化 ... 39
2.8.4. 測位情報の取得 ... 41
2.8.5. 時刻同期 ... 44
2.8.6. GPS時刻を求める方法 ... 47
2.8.7. 観測データ回収のための無線通信 ... 48
2.9. 実験 ... 55
2.9.1. 森林環境下における測位性能の確認 ... 55
2.9.2. 無線通信 ... 61
2.9.3. 消費電流 ... 62
2.9.4. 観測期間の推計 ... 63
2.10. まとめ ... 65
2.10.1. 試作デバイスの評価 ... 65
2.10.2. GPSテレメトリに適したGPS受信機 ... 66
2.11. 第2章の参考文献 ... 67
3. GPS 受信機の省電力な運用方法 ... 68
3.1. はじめに ... 68
3.2. GPSの仕様 ... 68
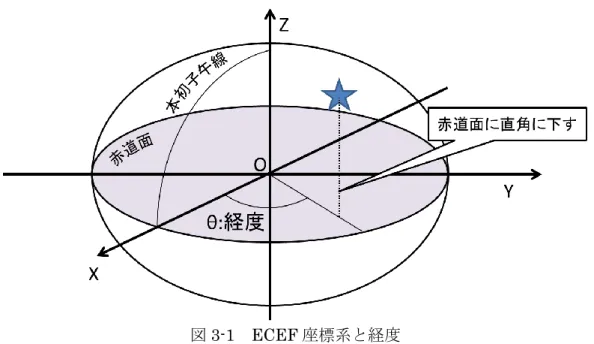
3.2.1. ECEF座標系 ... 68
3.2.2. 地球楕円体 ... 69
3.2.3. WGS 84測地系 ... 69
3.2.4. 緯度・経度・楕円体高 ... 69
3.2.5. 測位原理 ... 70
3.2.6. 航法メッセージの構造 ... 71
3.2.7. GPS時刻とUTCの関係 ... 72
3.2.8. 航法メッセージの放送タイミング ... 73
3.2.9. 測位モード ... 74
3.2.10. TTFF(初期位置算出時間) ... 75
3.2.11. 測位衛星の軌道 ... 76
3.3. GPS受信機の電源を入れるタイミングによる TTFF短縮効果 ... 77
3.3.1. 概要 ... 77
3.3.2. 手法 ... 77
3.3.3. 実験 ... 78
3.3.4. 結果 ... 78
3.3.5. 本手法の将来的な優位性 ... 80
v
3.4. GPS受信機の起動間隔の合理的決定 ... 81
3.4.1. 概要 ... 81
3.4.2. 手法 ... 81
3.4.3. プログラム開発の必要性 ... 81
3.4.4. プログラムの開発 ... 82
3.4.5. シミュレーション ... 90
3.4.6. ホットスタートの割合の予測結果 ... 91
3.4.7. 実測値との比較 ... 92
3.4.8. 消費電流量の推計 ... 94
3.5. まとめ ... 95
3.6. 第3章の参考文献 ... 96
4. 衛星測位の補間のための 気圧高度履歴に基づく移動経路推定 ... 98
4.1. はじめに ... 98
4.2. 提案システムの概要 ... 99
4.3. 気圧高度推定手法 ... 100
4.3.1. 高さの定義 ... 100
4.3.2. ICAO標準大気モデルと気圧高度 ... 101
4.3.3. 固定観測局を用いた移動局の気圧高度推定 ... 102
4.3.4. 主な誤差要因 ... 103
4.3.5. 予想される気圧高度の精度 ... 107
4.3.6. 気圧高度の推定精度向上の方法 ... 108
4.4. 気圧観測デバイス ... 109
4.4.1. GPS首輪に組み込んだ場合の構成 ... 109
4.4.2. 気圧センサ ... 110
4.4.3. SCP1000における気圧の観測に要する消費電流容量 ... 110
4.5. 移動経路の推定アルゴリズム ... 111
4.5.1. 概要 ... 111
4.5.2. 処理の流れ ... 112
4.6. 気圧高度の精度確認実験 ... 118
4.6.1. 実験概要 ... 118
4.6.2. 結果 ... 118
4.7. 提案アルゴリズムの確認実験 ... 120
4.7.1. 実験概要 ... 120
4.7.2. 実験の結果 ... 123
4.7.3. GPSの測位間隔と消費電流の関係 ... 126
4.8. まとめ ... 127
vi
4.9. 第4章の参考文献 ... 128
5. 結論 ... 130
5.1. 本論文のまとめ ... 130
5.2. 今後の研究の展開 ... 132
5.2.1. 気圧高度の測位演算への活用 ... 132
5.2.2. ソフトウェアGPS受信機の利用 ... 132
5.2.3. 無線器とGPS受信機の更新 ... 134
5.2.4. 研究資料の公開とフィードバック ... 134
謝辞 ... 135
1
2
1. 序論
1.1.
研究の背景
1.1.1.
獣による農林業被害とニホンジカによる森林の荒廃
近年、日本国の山林及び農村においてニホンジカ,ニホンザルやイノシシによる農 林業被害が増加している[1][2][3]。例えば、九州のえびの高原ではニホンジカによる 食害により下草が見られなくなり、商業用樹木の樹皮が剥され枯死する被害が出てい る。図1-1と図1-2にニホンジカによって食害された森林と付近で確認されたニホン ジカを示す。日射が入る森林にも拘らず、下草がほとんど生えていないことが分かる。
この状況が続けば森林更新が途絶えてしまい、病害虫の流行によって森林が一度に枯 れてしまう可能性すらある。
図1-1 森林の下草が食害された様子 鹿児島県霧島地方 2011年3月18日撮影
図1-2 食害を確認した森林周辺のニホンジカ 鹿児島県霧島地方 2011年3月18日撮影
3
図1-3に全国の農林業被害額の推移を示す[4][5]。被害額は徐々に増加傾向にある。
この被害額の内訳では、ニホンジカによる損害が最も大きい。農林業被害の対策とし ては、例えば森林管理局による被害防止策の開発とその農林業従事者に対する指導が 行われている。また、ハンターのボランティアによる害獣駆除も行われている。しか し、農村の過疎化とハンター人口の高齢化が進んでいるため現時点での対策は今後 10年~20年程度で限界が来ると考えられる。また、野生動物は狩猟圧に対して出産 数を増加させる傾向にあるなど、対策は一筋縄ではいかない。
この様な現状から、生息頭数のコントロールのために野生動物の詳細な行動調査が 必要とされている[6]。最近では、行動調査手法の一つとしてGPSテレメトリと呼ば れる野生動物の位置を追跡する調査手法が利用されている。
1.1.2.
これまでに明らかにされているニホンジカの生態
ニホンジカは日本に生息する森林性の草食性哺乳類である。ニホンジカの体重は、
地域の食糧量に影響されるもののメスで 45 kg 前後である。また、その行動面積は
0.4~3 km2程度である[7]が、中には10 kmほども季節移動する個体が見られる。生
息している標高は0~3000 mであり、生息地域の植生や狩猟の時期に合わせて生活 パターンが分かれている[8]。九州以南では定住性が強いが[9]、北海道のエゾジカは 移動性が強い。エゾジカの場合、冬季は群れで40 kmほども移動する。
図1-3 農林業被害額の推移 150
170 190 210 230 250
2005 2006 2007 2008 2009 2010
農林業被害額 [億円]
年
4
1.1.3. GPS
テレメトリによる調査
GPS テレメトリとは、野生動物の行動面積や季節移動や繁殖行動などを GPS や
GLONASSなどの測位衛星を用いて行われる調査手法である[10]。この調査では、図
1-4に示すように衛星測位デバイスとメモリを組み込んだ観測機器(以下、GPS首輪)
を野生動物に取り付けて調査が行われる。以下では、その特徴と課題について説明す る。
図1-4 GPSテレメトリ調査手法
1.1.3.1.
調査手法の特徴
GPS テレメトリによる調査の特徴は、古くから使われている電波標識を用いた方 向探査に比べて人件費が小さいこと、大量で精度の高い測位が行えることが挙げられ る。一方で、GPS 首輪内に保存されている測位情報の回収に多大な労力が必要であ り、かつ観測期間が短くなりやすいこと、衛星からの電波を遮蔽されると測位できな いことが特徴である。
1.1.3.2. GPS
首輪の重量制限
野生動物に調査用の機器を取り付ける際、行動の負担とならないようにその重量は 一般的に体重の 3~5%以下が望ましいとされている。ただし、軽ければ軽いほど良 い。位置の観測回数が同じであれば重量は平均的な消費電力に比例する。従って、可 能な限り省電力化による軽量化が重要である。
1.1.3.3.
森林下で
GPS受信機に求められること
全天が常に見える飛行中の鳥や浮上中の鯨類とは異なり、森林性の哺乳類の場合は GPS の測距信号を遮蔽されやすい環境である。山の地形に加えて、樹木が測距信号 を遮蔽または減衰させてしまう。従って信号を捕捉する能力が特に高いことが森林性 哺乳類の追跡を行うGPS首輪に求められる。
5
1.1.3.4.
野生動物管理と
GPSテレメトリの関係
野生動物は人間社会と離れた場所に生息し、人とは異なる生活史を持つ。その生態 を観察することは困難が伴うことから、行動理由を考察するに至るほどの客観的な調 査手法が確立している動物はニホンザルなどの一部に限られている。謎に包まれた動 物の生態を知る第一歩として、その位置情報は非常に重要であり、これはGPSテレ メトリの得意とする分野である。
例えば、ある地域のイエネコを一斉に追跡することで空間の時分割的シェアリング を行っていることが最近明らかにされた[11][12]。また、鳥類がどのようにして帰巣 しているかやナビゲーション方法を考察する上で貴重なデータをGPSテレメトリは 提供している。
農林業被害に対する対策としての野生動物管理においてもGPSテレメトリは重要 である。生物種や地域さらには個体群のサイズによって行動パラメータが非常に多彩 に変化するから、野生動物による農林業被害を防止するためには対象動物の行動を良 く調べる必要がある。
例えば、九州においてはメスジカを誘引して狙撃することで個体数調整に成果を上 げている。この例では、狙撃と合わせてGPS首輪を用いて周囲のシカを監視するこ とにより、ある地点で個体が間引かれたとしても別の個体の流入が少なく、効果が 2~3年ほど持続することが明らかにされている。
ところで、上記の手法はイノシシやニホンザルには適用が難しい。イノシシの場合、
狩猟圧がかかると素早く出産数を増やすことで個体数を回復させる性質があり、被害 を減らすことにはつながり難い。また、イノシシの生息数と被害は比例しない場合も 見られ、まだ生態についての理解が足りない状況である。ニホンザルの場合、リーダ ー格の個体が排除されると群れが崩壊し、返って被害面積を拡大させることがある。
また、群れ全体のサイズを縮小させることができたとしても、他の地域から別の群れ が流入することで被害は減らないという事例も報告されている。従ってイノシシやニ ホンザルに対する対策は、基本的に被害地の防護と忌避の植え付けが中心となる。
イノシシやニホンザルの様に防護が対策の中心であっても、GPS テレメトリは重 要である。例えば尾瀬の湿原保全が挙げられる。尾瀬は近年増えてきたシカによる食 害によりダメージを受けつつあり、生息数調査と合わせてGPSテレメトリによる行 動調査が行われている。この例においては、ニホンジカの移動経路を明らかにした上 で数kmに渡る防護柵の設置が行われている。移動経路を塞ぐことで湿地への侵入が エネルギー的に割に合わないようにし、結果として湿原の保護につなげているのであ る。
6
1.1.3.5. GPS
以外の代表的測位方法
野生動物の行動を調査する手法は、それぞれの動物の生息環境や生態に合わせて選 択される。例えば、水中や深い地中では衛星測位方法は利用できない。また、行動域 が狭すぎる場合も衛星測位方式の測位精度では十分でないことも考えられる。本項で は、参考のために水中測位手法について紹介するとともに、陸上で利用可能な GPS 以外の測位方法について説明し、本研究で対象としている野生動物を追跡する上では GPSによる測位が有利であることを説明する。
GPS以外の測位方法とその特徴を表1-1に示す。
表1-1 GPS以外の代表的測位方法とその特徴
方式 特徴
水中音響 水生動物の位置や生息密度の推定に用いられている。
電波標識 有効範囲は最大20 kmほど。人件費と熟練が必要。
アルゴスシステム 全球で利用可能。通信費用が年間20(万円/モジュール)ほど。
ジオロケータ 全球で利用可能。測位精度は100 kmほど。数g程度と軽い。
水中音響式とはGPSでは測位できない水中において、生物の発する音や取り付け た超音波発信器の発する音を水中マイクで捉え、その方向を複数地点から観測するこ とで測位を行う方法である。これまでにジュゴンや魚での成果が発表されている。
電波標識方式とは短時間の発信を繰り返す無線器を動物に取り付け、指向性アンテ ナを用いて電波の到来方位を調べる方法である。デバイス価格が数万円と安いことか ら広く用いられている。測位精度は調査者の熟練度に依存しており、数十 m~数百 mといわれている。
アルゴスシステムとは、高度800 kmを周回するアルゴス衛星を用いた測位方法で ある。通信に用いた電波のドップラーシフト量を複数の座標で計測することで測位を 行う。測位精度は数百m~数kmといわれている。
ジオロケータとは、日付と太陽の日の出・日没時刻を記録し、データをメモリから 回収後に測位計算を行う方式である。非常に軽いために小型の渡り鳥の調査に利用さ れている。
ニホンジカやイノシシやニホンザルの行動域は、1日の最大の移動距離は数km、
最小の移動距離は100 m程度とされている。従って、上記の測位方法では測位精度 が不足する。それに対し、GPS テレメトリは全球で測位が行える点と、測位精度が 10 m程度という点で優れている。しかしながら、次項に述べる課題が残されている。
7
1.1.3.6.
課題
GPSテレメトリには以下の課題が存在する。
(1) 調査の省力化
(2) GPS の測位回数の向上 (3) 測位できる領域の拡大
[課題(1): 調査の省力化]
野生動物の行動調査者は、GPS首輪のバッテリが切れる前にGPS首輪を動物から 脱落させて回収している。その準備として、山にて電波標識を使った方位探索を定期 的に行っている。既存の調査方法は人件費がかかりやすい上に、山中でのケガ・遭難・
ダニ・ヤマビル・感染症・獣に襲われるなどのリスクが存在する。これからの GPS テレメトリではより多くの調査個体数を増やすことが望まれており、省力的な調査手 法が必要である。
[課題(2): GPS の測位回数の向上]
現在のGPSテレメトリは行動面積や移動の有無を確認するには十分ではあるもの の、行動理由を考察するほど密な観測を十分な期間持続できていない。例えば、ニホ ンジカ向けの観測機器を用いて毎日10分間隔で計測していては観測期間が3ヶ月程 度となる。実際には、観測の多くが観測期間を延ばすために測位の間隔を2時間~4 時間や10分などと日によって変えるなどされている。
GPS テレメトリの理想はその行動履歴から彼らの行動を理解することである。そ のためにより密な測位が望まれており、GPSの測位回数の向上が必要とされている。
[課題(3): 測位できる領域の拡大]
衛星測位システムでは、観測機器もしくは衛星から発射された測距信号がもう片方 へ到達し復号されなければ測位できない。従って測距信号が遮断されたり減衰された りすると測位に支障をきたす場合がある。例えば、東京都の新宿などのビル街や密生 した樹木下は測位できない可能性が高い。
現在のGPSテレメトリでは得られた測位座標を基に行動面積が把握されているが、
行動圏内にGPSの測位できない地点があると行動の考察を行う上で支障となる。例 えば、降雨時の流水によって形成されるV字谷を野生動物が移動に用いた場合、GPS は測位できない可能性が高い。この場合、追跡個体がどのような移動経路を持ってい るのか全く情報がないことになる。この様な理由から、測位できる領域を拡大させる ことは重要である。
8
1.2.
従来の研究
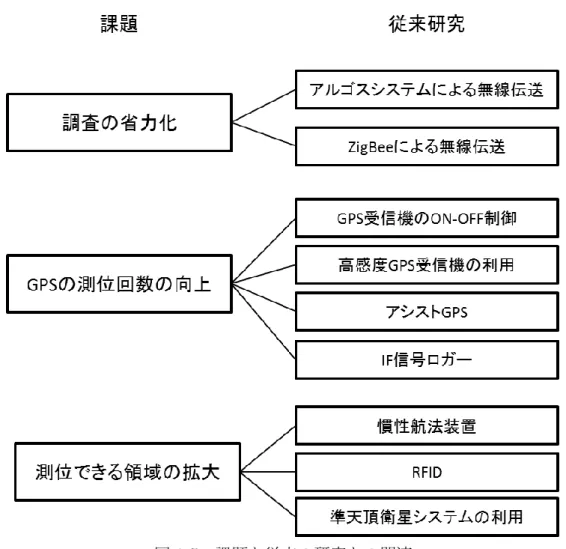
本節では、従来の研究成果について述べる。まず、図1-5に前述した課題と従来の 研究との関連性を示し、次節よりこれらについて説明する。
図1-5 課題と従来の研究との関連
9
1.2.1.
観測情報の無線伝送による省力化
遠隔地からの観測データ回収を省力化するための手段として、古くから無線による 観測情報の回収が行われてきた。以下の項では、野生動物の追跡にこれまで用いられ てきた通信方式であるアルゴスシステムとZigBeeについて紹介し、その課題を説明 する。
1.2.1.1.
アルゴスシステムを用いた無線伝送
通信インフラを設置することが困難な地域において、低軌道を周回するアルゴス衛 星を利用して測位情報を伝送する方法が採られている。例えば、地球規模での回遊を 行うウミガメやクジラや渡り鳥や国立公園内の動物などである[13][14]。本手法では、
測位結果はサービス会社を経由して取得できる。
アルゴス衛星を利用した方法は全世界規模で利用可能というメリットがあるもの の、多数の個体を同時に追跡するには通信費が重荷になってしまうというデメリット も備えている。
1.2.1.2. ZigBee
を用いた無線伝送
ZigBeeとは、IEEE802.15.4をベースとし、Bluetoothよりも遠距離でWi-Fiより も省電力且つ低速通信向けに開発された無線ネットワークプロトコルである。
ZigBee による無線ネットワークは、データの送受信を行うエンドデバイスと、ネッ
トワーク内のルーティングを行うコーディネータと、無線伝送の中継に徹するルータ の3つで構成される。これまでに、ZigBeeを取り入れたGPSテレメトリ手法が提案 されている[15][16]。
本手法の特徴は無線機同士が自動的にメッシュネットワークを形成し、測位情報を 無線伝送してくれることである。例えば、高価なマイコンやメモリを搭載したデバイ スを1つ用意し、その周囲を囲むように無線モジュールとバッテリのみの中継局を設 置することで通信範囲を簡単に広げることができる。
既存の研究で提案されたこの手法は省力化に成功しているが、コーディネータとル ータの電源を切ることができないために、野外においてはバッテリの搭載量が増えや すい、または充電設備が必要という問題がある。例えば、受信待機電流が40 mAの モジュールだとLi-Poバッテリで標準的な2000 mAhを約2日で消費してしまう。
太陽電池を用いてバッテリを充電するとした場合、森林下では樹木が太陽光を遮蔽し てしまうためにより、大型の太陽発電パネルが必要となる。野生動物の行動調査にお いては、ネットワーク全体が省電力になる仕組みが必須である。
10
1.2.2.
測位回数向上のための省電力化手法
測位回数を増やすためにはGPS首輪内の電子回路が省電力に動作する必要がある。
以下では、これまでの研究で行われてきた省電力化の方法について説明する。
1.2.2.1. GPS
受信機の
ON-OFF制御
携帯電話においてGPS受信機を利用すると電池の消耗が早いことから分かる様に、
GPS受信機の消費電力量は非常に大きい。そのためGPSテレメトリでは、測位スケ ジュールに従ってGPS受信機の電源のON-OFFを繰り返している。例えば、1時間 に2分間だけGPS受信機を起動するとした場合、消費電力量は常時ONに比べて約
3.3%となる。ON-OFF機能は、観測期間を延ばすために必須の機能である。
1.2.2.2.
高感度
GPS受信機の利用
GPS 受信機の電源を入れてから測位解が得られるまでにかかった時間を TTFF
(Time To First Fix:初期位置算出時間)といい、この時間が短いほど消費電力量が 少なくなる。TTFFを短縮するにはGPS受信機の捕捉感度と追尾感度という2つの 受信感度を高める必要性がある。これらの性能の高いGPS受信機を特に「高感度GPS 受信機」という。森林環境では特に捕捉感度が重要であり、−140 dBm程度以上の捕 捉感度が必要である。
高感度化するためには以下の手法が良く知られている。アシスト情報に関しては
1.2.2.3にて説明する。
(1) 測距信号の積分時間の延長 (2) アシスト情報の活用 (3) 相関器数の増加
なお相関器数の増加は消費電力を上昇させるが、ほとんどの受信機メーカーは半導体 微細化技術の向上によって、受信感度の上昇と省電力化を両立している。
1.2.2.3.
アシスト
GPSアシストGPSという言葉には2通りの定義が存在する。1つ目は、衛星軌道の予 想情報をアシスト情報といい、このアシスト情報を用いた測位のことである。2つ目 は、携帯電話事業者による測位サービスの一つで、測位演算をサーバ側で行うことを 指す[17]。
前者において、GPS 受信機はアシスト情報を基に測距信号のドップラーシフト量 と時間遅延量を推定するとともに、放送信号を予想することで信号の積分時間を延ば
11
す。このため信号捕捉感度および信号追尾感度が向上し、TTFFを大きく短縮できる。
例えば、ウォームスタートにおいてTTFFは約30秒であるが、アシスト情報があれ ばこれが数秒以下となる。ただし、衛星軌道は徐々にずれるため、一般的にはアシス ト情報の有効期限は2週間程度が限界とされている。また、アシスト情報は200 kByte 程度と決して小さな情報ではない。
後者は携帯電話における測位にかかる消費電力量を減らすために、GPS の IF
(Intermediate Frequency: 中間周波数)信号もしくは擬似距離1を事業者のネット ワークを通じてサーバへ伝送し、そこで測位演算を行う方法である。サーバには常に 最新の衛星軌道情報がアップロードされており、測位演算は瞬時に行われる。
いずれにせよアシストGPSは高速な回線接続が必要である。携帯電話を用いた野 生動物の行動追跡事例は報告されているものの[18][19]、携帯電話エリア内でなけれ ば測位できないことに加えて、観測期間が短いことやデバイスの開発に投資した資金 を回収できないことから普及には至っていない。
1.2.2.4. IF
信号ロガーとソフトウェア
GPS受信機
測位演算をGPS受信機が行うから消費電力量が増えるという観点から、IF信号を タイムスタンプとともにメモリに保存するGPS受信機(以下、IF信号ロガー)が開 発されている[20][21]。測位解はIF信号をソフトウェアGPS受信機に入力すること で得られる。この手法ではIF信号のサンプリング時間が数ms~200 msほどと短く、
メモリやマイコンの起動時間も1 秒弱~10秒前後と短いために消費電力量が非常に 小さいことが特徴である。
IF 信号はほぼ乱数であるため記録した情報を圧縮できない上に、1 回の測位情報 量が大きい。例えば、4 MHzサンプリング3 bit分解能でサンプリング時間が10 ms
だと15 kByteにもなる。これほど情報量が大きいと低速無線回線を用いた観測情報
の回収は困難である。測位情報を取得するには観測機器を直接回収する必要がある。
また、IF 信号ロガー単独では測位演算が行えないためにリアルタイムでの位置把握 は電波標識を頼りにした三角測量となる。従って測位情報回収の省力化が困難である。
1 GPS衛星の時刻ドリフトやGPS受信機の時計誤差や電離層遅延や対流圏遅延やマ
ルチパスの影響を含めた、GPS受信機と衛星間の距離
12
1.2.3.
測位できる領域の拡大
1.2.2.2 で説明した高感度化の方法を用いると測位可能な領域が増えるものの、そ
れでも森林内には測位できない地形や樹木環境が存在する。そのような環境において 利用可能な技術を以下で説明する。
1.2.3.1.
慣性航法装置
GPS を用いた衛星測位は、高層ビル街では測距信号が遮蔽されやすく、トンネル 内や建屋内では完全に遮蔽されるため測位ができない。そこで、慣性航法装置やその 他のセンサを用いて測位の補間が行われている。例えば、カーナビゲーションや携帯 電話ユーザを対象としたサービスである。主に角速度センサ、加速度センサ、車速セ ンサ、地磁気センサが使われている。これらの変化量を時間積分し、GPS の測位解 を境界条件とすることで世界測地系における座標値を計算することができる。
本手法はこれまでに海洋動物の生態の解明に大きな貢献をしている[22]が、本質的 に連続した観測が必要であるため、1 年間以上の稼働を期待されるGPSテレメトリ には利用できない。
1.2.3.2. RFID
タグの利用
本手法はRFIDの短距離通信の特性を生かして測位を行う手法である。すなわち、
通信できたRFID 読み取り機の位置が被追跡個体の位置とみなされる。GPS に代わ る測位方法として提案されており、室内ロボットでは実用化されている。野生動物へ 適用した例としては、追跡対象となる動物にRFIDタグを取り付け、森林中にRFID 読み取りデバイスを配置することで、付近を通過した動物を記録するというシステム が提案されている[23]。
本手法は動物に取り付ける RFID にバッテリを搭載する必要がないことに加え小 さな個体への適用が可能であることが特徴である。ただし、RFIDタグ読み取り機を 環境中に大量に設置する必要があることから、野生動物の追跡用として営利目的で運 用された例はない。
1.2.3.3.
準天頂衛星システムの利用
GPSは測位のために測位衛星が最低 4 つ必要である。日本の都市部には測位衛星 を常に4つ以上確保できない地点が多数あり、この問題の解決と更なる測位サービス の高度化を目指して準天頂衛星システム(以下、QZSS)の実用化が目指されている。
これまでに都市部における測位成功率の向上が報告されている[24]。森林環境下では 樹木による測距信号の遮蔽が顕著であり、森林下でのGPSテレメトリでは測距信号 の減衰を受けにくい高仰角に存在する準天頂衛星は非常に重要と考えられる。
13
1.3.
近年の技術動向
1.3.1. GNSS
測位衛星の増加
2013年6 月現在、GPS テレメトリに利用可能な測位衛星システムは米国のGPS とロシアのGLONASSである2。今後、日本のQZSSだけでなく中国のBeiDouや欧
州のGalileoが計画されており、今後20年以内に日本から見える測位衛星は2~3倍
になると予想されている[25]。測位衛星が増えることでこれまで測位が不可能であっ た森林や谷間地形においても測位ができるようになる可能性は高い。
GPS以外の測位システムを利用した受信機はGNSS受信機と呼ばれている。次世 代の測位システムでは、GPS による成果を踏まえて、マルチパス耐性やジャミング 対策が施される予定となっている。そのため、測距信号に搭載される符号長が長めに なる、またはチップレートが高速化されるなどの仕様が決定している。
最近の状況はGPSテレメトリにとって測位可能な領域が増えるため歓迎すべき状 況である。しかしながら、GNSS受信機の消費電力はGPS単独での受信機に比べ増 えざるを得ない。今後もGPSテレメトリにとっては省電力化が重要となるだろう。
1.3.2.
センサネットワーク向け
920 MHz帯の解放
これまでの研究で多く用いられてきた2.4 GHz帯は樹木の遮蔽に弱いという問題 があり、通信距離の拡大が望まれてきた。通信距離の延長には低い周波数帯の利用が 重要である。通信距離の拡大はスマートメータを展開する上で課題となっており、
2011年には特定小電力無線に対して920 MHz帯が解放された。それと同時に、これ
まで10 mWに制限されてきた出力が最大250 mWまで緩和されている。
920 MHz帯や950 MHz帯における伝搬特性についてはこれまでに各種実験の結
果が報告されている[26][27]。その結果によれば、見通し外環境において 920 MHz 帯の通信距離は2.4 GHz帯と比べて同出力で約10倍と報告されている。今後、無線 ネットワークを利用したGPSテレメトリが実用的になる可能性は高い。
2 GLONASSへの対応は機種によって異なる。
14
1.4.
本研究の目的
これまでに述べた、ニホンジカやニホンザル,イノシシなどの森林性哺乳類に対す るGPSテレメトリの問題点を解決するため、本論文ではまず省力化を実現するデバ イスの開発を行い、次に省電力化を図るためにGPSの仕様を考慮した運用方法を導 き出し、最後にGPSでは把握できない地形や樹木下での測位の補間方法を開発する ことを目的としている。
1.5.
本論文の構成
本論文は本章序論を含めて5章から成る。以下に各章の概要を述べる。
第2章では、GPS テレメトリを省力化することを目的とし、無線による測位情報 の自動的な回収の提案と、それを実現するハードウェアの消費電力について検討する。
この章では、開発したデバイスの消費電流が既存の研究と比べて十分に少ないこと、
および1 年程度の観測が可能であることを示す。加えて、GPS 受信機の測位実験の 結果から、測位完了後に一定期間測位を持続することの効果を示す。
第3章では、GPSの測位回数を増加させることを目的とし、GPSの測距信号仕様 を考慮した測位スケジューリングについて検討する。これまで、GPS の仕様にまで 踏み込んだ運用方法について触れた研究はほとんど発表されていない。GPS 受信機 の起動タイミングとTTFFの関係を実験結果から述べる。また、GPS受信機の測位 間隔とホットスタートの割合を予想するプログラムを開発し、最適な測位間隔につい て検討する。
第4章では、山林におけるGPSの測位を補間することを目的とし、気圧高度とデ ジタル標高モデルを組合わせることで野生動物の移動経路を推定する方法について 述べる。ここで、気圧高度とは気圧を用いて推定される標高などの高さである。本研 究では固定の大気観測局を基準とすることでGPSの単独測位に比べ高精度な高さを 求められること、およびこれまで全く不明だった測位点間の移動経路を推定できるケ ースがあることを示す。
第5章では、本研究についてまとめると共に、今後の研究の方向性を説明する。
15
1.6.
第
1章の参考文献
[1] 荒木 良太, 横山 典子, “ニホンジカが生物多様性に与えるインパクト~不可
逆的影響の現状とその取り組み~”, 哺乳類科学, Vol. 51, No. 1, pp. 201-204, 2011.
[2] 八代田千鶴, “シカの個体数管理体制の現状と今後の展望, 九州の森と林業”,
No. 98, pp. 1-3, 2011.
[3] 林野庁, “野生鳥獣による森林被害”,
http://www.rinya.maff.go.jp/j/hogo/higai/tyouju.html, 2013.
[4] 農林水産省, “平成22年度 食料・農業・農村白書”,
http://www.maff.go.jp/j/wpaper/w_maff/h22/zenbun.html, 2011.
[5] 農林水産省, “平成23年度 食料・農業・農村白書”,
http://www.maff.go.jp/j/wpaper/w_maff/h23/zenbun.html, 2012.
[6] 濱崎伸一郎, 小泉透, 山内貴義, “生物多様性保全に向けたニホンジカの個体数
管理”, 哺乳類科学, Vol. 51, No. 1, pp. 181-185, 2011.
[7] 横山典子, 片桐成夫, 金森 弘樹, “島根半島・弥山山地におけるニホンジカ
(Cervus nippon)の行動圏と樹種構成との関係”, 森林応用研究, Vol.11, No.2 pp. 27-38, 2002.
[8] 泉山茂之, 望月敬史, 瀧井暁子, “南アルプス北部の亜高山帯に生息するニホン
ジカ(Cervus nippon)のGPS テレメトリーによる行動追跡”, 信州大学農学 部AFC報告, No.7, pp. 63-71, 2009.
[9] 矢部恒晶, 小泉透, “九州の生息地におけるニホンジカの行動”, 九州の森と林
業, No. 65, pp. 1-3, 2003.
[10] 鈴木健次郎, 恒川篤史, 高槻成紀, 東英生, “野生動物の生態研究におけるGPS
の利用可能性 金華山島のニホンジカ(Cervus nippon)を事例として”, GIS-理 論と応用, Vol. 8, No. 2, pp. 69-75, 2000.
[11] Structure & Motion Laboratory, “RVC Wildlife Tracking Collars”, http://www.rvc.ac.uk/SML/People/awilson/Wildlife-tracking-collars.cfm, 2013.
[12] BBC, “Secret life of the cat: The science of tracking our pets”, http://www.bbc.co.uk/news/science-environment-22821639, 2013.
[13] 日野輝明, 石田朗, “GPSアルゴス追跡による東海地方のカワウの行動圏と季
節移動”, 日本鳥学会誌, Vol. 61, No. 1, pp. 17-28, 2012.
[14] 大井徹, 大谷達也, 三浦慎悟, 辻本恒徳, 藤原千尋, 藤村正樹, 赤塚謙一, “ア ルゴスシステムによるツキノワグマの追跡事例”, 哺乳類科学, Vol. 42, No. 2, pp. 123-128, 2002.
16
[15] Vishwas Raj Jain, Ravi Bagree, Aman Kumar, Prabhat Ranjan,
“wildCENSE: GPS based Animal Tracking System”, ISSNIP2008, pp. 617
-622, 2008.
[16] Matthew Rutishauser, Vladislav V. Petkov, Terrie Williams, Chris Wilmers,
“CARNIVORE:A Disruption-Tolerant System for Studying Wildlife”, ICCCN 2010 Proceedings of 19th International Conference, pp. 1-8, 2010.
[17] カミル グライスキー, 山森修, 伊藤敏之, “「A-GPS」- ネットワーク支援型
GPS測位方式の技術概要と携帯電話における適用”, GPS/GNSSシンポジウム 2011, pp. 103-120, 2011.
[18] 山森修, 大槻昌弘, 上野洋一, “動物生態調査に適用するGPS携帯電話につい
て”, GPS/GNSSシンポジウム2010, p. 243, 2010.
[19] 佐伯緑, 斎藤昌幸, 園田陽一, “個体追跡調査における携帯GPS端末を使った
位置情報システムの利用”, 哺乳類科学, Vol. 49, No. 2, pp. 277-282, 2009.
[20] Ivan Petrovski, “Ultra-light bird tracking system based on BGPSTM”, GPS/GNSSシンポジウム2011, p. 243, 2011.
[21] Alison K. Brown and Peter Brown, “Ultra Low-Power GPS Recorder (TrackTag®)”, ION61st Annual Meeting, pp. 726-732, 2005.
[22] 三谷曜子, Kelly Newton, Erin Oleson, John Calambokidis, James Harvey,
Donald Croll, 加藤明子, 内藤靖彦, “落下するクジラ:データロガーによって
明らかとなったシロナガスクジラの潜水行動”, 第2回日本バイオロギング研 究会シンポジウム講演要旨集, pp. 23-24, 2006.
[23] So-Hyeon Kim, Do-Hyeun Kim, “Animal Situation Tracking Service Using RFID, GPS, and Sensors”, ICCNT 2010 Second International Conference, pp. 153-156, 2010.
[24] 末武雅之, 近藤徹, “車載用QZS受信機の開発”, GPS/GNSSシンポジウム
2011, pp. 167-176, 2011.
[25] 西口浩, “GNSSの最新状況”, GPS/GNSSシンポジウム2010, pp. 3-21, 2011.
[26] 福永茂, “920MHz制度化動向の解説と関連標準の紹介”, ZigBee SIGジャパ
ン,
http://www.zbsigj.org/wp/wp-content/uploads/2012/03/20120313_session9.pd f, 2012.
[27] 総務省, “山間部における広域センサーネットワークの構築に関する調査検討
会 報告書”,
http://www.soumu.go.jp/soutsu/tohoku/houkoku/H21/sensor_net/pdf/sensor_
net.pdf, 2009.
17
18
2. 無線ネットワークを利用した
GPS テレメトリ観測システムの開発
2.1.
目的
既存のGPS テレメトリでは、測位データを回収するために GPS 首輪の位置を定 期的に把握する必要がある。この作業がGPSテレメトリにかかる調査費用を圧迫し ており、より多くの動物個体を調査対象とするためには調査の省力化が必要である。
これまでに、ZigBee の無線ネットワークを用いた測位情報の回収システムが提案 されている[1][2]。しかしながら既存の研究で作成された電子回路はスリープ時の消 費電流が大きく、長期間の観測には向かない。また、基本的にZigBeeは全てのルー タの電源を常時入れておく必要があり、情報を回収する側に大きなバッテリが要求さ れる。さらに、多数のルータを介した通信となるためスループットの確保が難しいと いう問題がある。
本研究では、スリープ時の消費電流を実用レベルにまで下げた無線ネットワークを 利用可能なGPSテレメトリシステムの開発を目的とし、実証試験用の電子回路を開 発した[3][4][5][6][7]。本章では本研究にて開発したシステムについて説明する。
2.2.
評価方法
ここで、本研究で開発したGPS首輪の評価方法について定めておく。評価は、以 下の2点で確認する。
1点目は、電子回路の消費電流による省電力性である。既存の研究において発表さ れたデバイスと消費電力を比較することで、本研究の優位性を確認する。ただし、
GPS 受信機や無線モジュールはその利用方法で大きく消費電力量と観測寿命を変え てしまう。従って、電子回路が観測に備えて待機している状態における消費電流を比 較対象とする。ここで、GPS 受信機は機種によって内部メモリを保持するための消 費電流が大きく異なることと、モジュールであるため換装が可能であることから消費 電流の比較には用いない。
2 点目は、GPS テレメトリとしての観測期間が十分に長いことである。具体的に は、本研究で開発を終えた時点において市販されているニホンザル用のGPS首輪の 動作期間である3ヶ月~6ヶ月を、本研究で開発したデバイスの観測期間が超えるこ とを確認する。
19
2.3.
提案システムの概要
本研究で提案するGPSテレメトリのイメージを図2-1に示す。本システムは森林 内を移動するGPS首輪と、測位情報を無線で回収する固定局から成る。双方に電源 を切断可能で無線ネットワークを構成可能な無線モジュールを搭載する。
野生動物が通信可能な範囲に入ると、固定局によって観測データの回収が自動的に 行われる。このとき、固定局とGPS首輪がタイミングを合わせて通信を開始するこ とと、GPS 首輪が固定局との距離を判定することで通信に要する消費電力を削減す る。また、測位情報の回収をGPS首輪に最も近い固定局が行うことでルータを介し た通信に比べスループットを向上できる。なお、固定局同士で通信が可能な様に固定 局を設置し、1か所の固定局に3G/LTE回線を利用したゲートウェイを接続すること で、測位情報をリモートで回収することも可能である。
図2-1 提案システムのイメージ
20
2.4.
固定局の設置スタイル
アンテナ高は高いほど伝搬損失が小さくなり、かつ地形による遮蔽効果を緩和する から、アンテナを高く設置する事が重要である。固定局のアンテナを高所に設置する 方法は、図2-2に示すように3通り考えられる。
バルーンは1回のヘリウムガスの充填で数日~1ヶ月ほどの運用が可能である。ガ スのコストは 1つのバルーン当たり 1 万5千円程度である。気象観測分野の慣例に 従えば20 m毎に目印となるリボンを付け、常時レーダーリフレクタを取り付けると 共に、夜間照明を点灯する必要がある。
次に、ポールを利用した方法である。アンテナ架台として利用できる長さのポール は 3~10 万円程度のものが市販されており、設置に複数人必要であるが常時設置が 可能である。
最後に、樹木を利用した方法であるが、こちらはコストがほとんどかからないとい うメリットがある。代わりに、アンテナ高を高くすることが難しいというデメリット もある。なお、設置の際に樹木を可能な限り傷つけない配慮が必要である。
図2-2 固定局の設置スタイル
21
2.5.
回路設計
固定局と GPS 首輪のハードウェアの要件は同じであるため、固定局と GPS 首輪 の電子回路は同一のものを利用できる。従って、本研究ではより電気的な設計基準の 厳しいGPS首輪の電子回路を設計した。本節では、設計した電子回路に搭載した各 モジュールとその選択理由について説明する。
2.5.1.
基本構成
設計したGPS 首輪の基本構成を図 2-3に示す。GPS 首輪は、GPS 受信機、マイ コン、SDカード、通信モジュール、その他の回路から構成される。固定局の電子回 路の構成も同じであるので、同一の電子回路を利用することができる。
図2-3 GPS首輪の電子回路構成
2.5.2. GPS
首輪の基本動作
マイコンはGPS受信機を定期的に起動させて測位を行う。測位後はその測位情報 をSDカードへ保存し、観測データがある程度保持された段階で無線ネットワークが 利用可能であればこれを送信する。
無線による観測データの回収は固定局に同期して行う。また、追跡対象の動物の移 動経路が固定化されている場合は固定局の通信圏内にいることをGPSの測位結果を 用いて判定することで、無駄な通信を削減できる。
22
2.5.3.
電源電圧
最近の電子部品の定格電圧は低下傾向にある。本研究では、2008 年現在で入手可 能な SD カードや無線モジュール,GPS 受信機等の定格電圧に合わせ、電子回路の 電源電圧を3.3 Vとした。
2.5.4.
省電力化のための基本設計
軽量化と観測期間の延長を両立するために、機器の省電力化が必要である。本研究 では、内蔵している全デバイスのON-OFF制御を行えるように電子スイッチを用い る。電源の電源制御の様子を図2-4に示す。
バッテリから出力される電源はレギュレータを介して定格電圧まで降圧し、マイコ ンが電子スイッチを制御することで各モジュールの電源を制御する。
常に動作する電圧レギュレータの自己消費電力は長期的な運用では非常に重要と なる。そこで、電圧レギュレータには自己消費電流の少ない LDO(Low Dropout Regulator)を採用した。
図2-4 電源制御
23
2.5.5.
回路図および細かい設計点
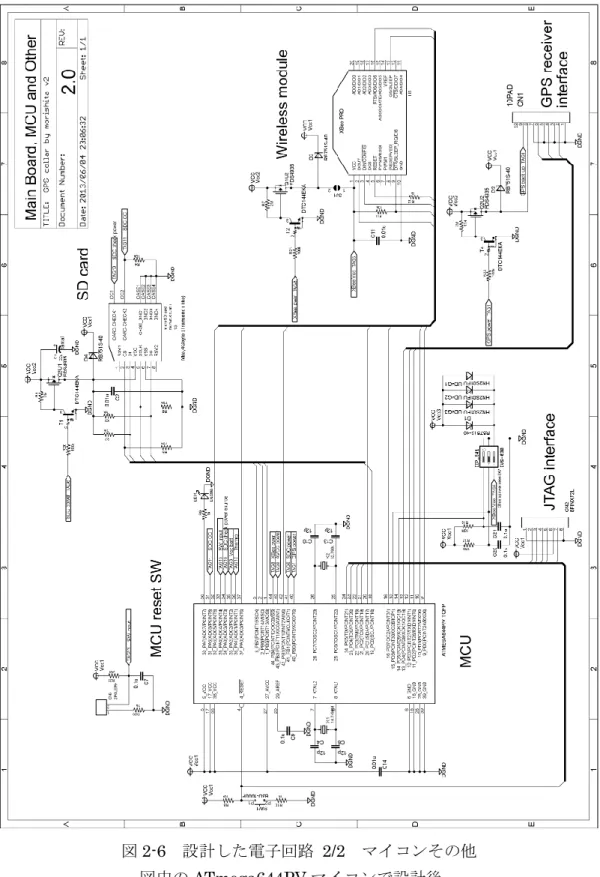
設計した回路図を図2-5,図2-6に示す。特に細かい設計を行った点について、以 下に説明する。なお、個々の重要なモジュールに関する選択については2.5.6項から 説明する。
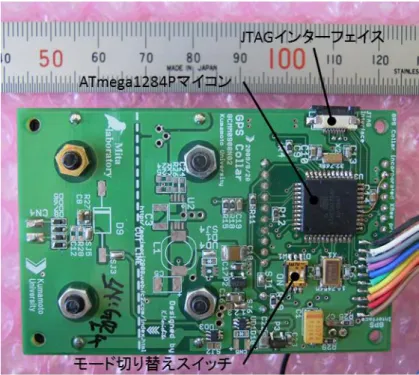
[電源]
実験を円滑に行えるように、複数のバッテリを搭載した上で外部電源を供給可能と した。また、電源供給源を2系統用意し、マイコンをスリープ中は2.4 Vで動作させ、
他のモジュールを稼働させる際には3.3 Vを利用できるようにした。これにより、マ イコンのスリープ中の消費電流と他の回路から漏れる電流を合わせて 1~2 µA 削減 した。なお、図2-5の中のpower source 2にあるように、3.3 VはDC-DCコンバー タによっても供給できるように工夫している。
[RTC の省略]
時刻の演算をマイコンに行わせることでRTC(Real Time Clock)を省略した。こ の効果によって、RTCの消費電流1 µAと、通信路から漏れる電流数十µAを削減し た。また、実装面積の削減にもつながった。
[メモリ]
観測データを格納するメモリには、大量の実験データを保存するために microSD カードを採用した。microSD カードは容量が大きいほど電源投入直後の初期化時間 が延び、さらにデータ書き込み速度が低下するから、512 MByte の物を選択した。
もし、追跡対象の動物の行動面積が狭く、無線による観測データ回収を頻繁に行える のであればEEPROMを採用することでさらに省電力化が可能である。2013年時点 で入手可能なEEPROMで最大の容量は256 kByteである。
[リプル対策]
GPS 受信機の電源ラインやバックアップ電源に乗るリプルは測位性能を劣化させ る。そこで、回路設計の上では、大容量コンデンサ・パスコンを用いてリプルを可能 な限り除去した。
[電子スイッチと漏れ電流対策]
電子スイッチにはパワーMOSFETを採用した。漏れ電流には、FETのゲートを高 抵抗でプルアップした上でトランジスタを用いてスイッチングさせることで対処し た。
24
図2-5 設計した電子回路 1/2 電源部
25
図2-6 設計した電子回路 2/2 マイコンその他
図中のATmega644PVマイコンで設計後、
同ファミリのATmega1284Pへ換装した。
26
2.5.6.
無線モジュール
利用可能な無線モジュールには、Wi-Fi,Bluetooth,携帯電話キャリアモジュール,
メーカー独自のプロトコルと物理層を搭載したモジュール,ZigBee,その他の無線 モジュールの6つが挙げられる。これらの内から、以下の項目について検討した。
(1) 通信距離 (2) 機器の価格 (3) サイズ
(4) 消費電力(電流)
Wi-Fiは無線モジュールの消費電力が大きく、山中に設置するシステムとして採用
は難しい。また、Bluetoothは野外で使用するには通信距離が短すぎる。携帯電話キ ャリアの通信モジュールは、無線器の大きさが手の平ほどもあり、動物に取り付ける には不適と考えられた。メーカー独自のプロトコルと物理層を搭載した無線モジュー ルは、モジュール単価とサイズの面,及び将来的な置換の面から採用を見送った。
ZigBee は、メッシュネットワー クを構築することを目的として設計された
IEEE802.15.4をベースにしたネットワークプロトコルである。その特徴は、省電力・
短距離通信・低通信速度・双方向通信である。ただし、ZigBee ネットワークにはス リープが不可能なコーディネータとルータが不可欠であるため、そのまま利用した場 合に固定局における電源設計の困難が予想される。
そこで、本研究では図2-7に示すDigi International社製のXBee pro S1を採用し た[8]。XBee pro S1はIEEE802.15.4をベースにしたモジュールであり、無線モジュ ールの置換が容易と考えられる。また、Digi 社独自のファームウェアを書き込むこ
とでDigiMeshというメッシュネットワークを構成可能である。このプロトコルはア
ドホックにネットワークノードの追加と削除が行える。従って、突然の電源OFFな どに耐えられる上に、ホップ通信が可能であるというメリットがある。
図2-7 XBee pro S1
27
2.5.7. GPS
受信機
GPSテレメトリではGPS受信機はマイコンによってON-OFFコントロールされ る。起動直後のGPS受信機は全ての相関器を用いて測距信号の捕捉を試みる。続い て、4つ以上の衛星について信号を捕捉し、それらの衛星に関する軌道情報を保持し ていれば、測位計算を行った上で測位情報を外部へ出力する。マイコンがこの測位情 報を受け取ると、GPS受信機の電源は素早くOFFとされる。
GPS受信機の選択に当たって、検討した項目を以下に示す。
(1) 捕捉感度 (2) 動作電圧 (3) 最大動作電流
(4) 測位情報の出力プロトコル
(5) アルマナックを必ずしも必要としない
測距信号が捕捉できなければ測位演算を行うことができないので、測距信号の捕捉 感度がGPS受信機の選定の上で最重要なパラメータである。森林下で行われるGPS テレメトリでは樹木による信号強度の減衰が起こるため、GPS 受信機には高感度な 信号捕捉性能が求められる。
動作電圧と電流は、GPS受信機以外の部品の設計に関わるパラメータである。GPS 受信機の動作電圧によっては、マイコンの動作電圧や通信路間のレベルシフトICが 必要となる。また、動作電流は全体の消費電力に直結することはもちろん、バッテリ の種類、リプル対策に影響する。また、GPS 受信機の定格電圧と電流はともにレギ ュレータの種類と電源回路の漏れ電流量に影響する。
GPS受信機の消費電流は、信号捕捉のために電源投入直後が最大となる。GPSテ レメトリでは測位完了の直後に電源を切るから、観測中はほぼ常に消費電流は最大と なる。従って、GPS受信機の消費電力の計算には最大消費電流を用いる。
GPS 受信機の出力する出力プロトコルが GPS 受信機で標準的な NMEA 0183
(National Marine Electronics Association)3であるか、独自バイナリであるかは開 発期間に影響する。もしプロトコルがバイナリであれば専用のパーサーを用意する必 要があり、小規模マイコン上でのデバッグ作業の煩雑性を考慮すると無視できない。
もしGPS受信機がバイナリ出力であれば2人月程度の開発期間を見込むべきである。
アルマナックとは測距信号に分割放送されているGPS衛星の粗い軌道情報である。
GPS 受信機はアルマナックをドップラーシフト量と時間遅延量の推定に用いて、
3 NMEA 0183とは、ASCIIコード文字により表現された、時刻,測位座標,速度,
測位に利用された衛星の情報などを含む測位情報である。