三重大学大学院工学研究科 修士論文
電気二重層キャパシタを用いた 系統連系型マイクログリッドの
電力品質向上に関する研究
平成22年度
三重大学大学院工学研究科 博士前期課程 電気電子工学専攻 エネルギーシステム研究室
池本 寛志
目次
目次
第1章 緒言 ... 1
1.1 研究の背景と目的... 1
1.2 本論文の構成 ... 6
第2章 電力平準化システム ... 7
2.1 電力平準化システムの概要 ... 7
2.2 制御手法 ... 9
2.2.1 d-q-0変換 ... 10
2.2.2 電流制御ブロック ... 11
2.2.3 直流リンク電圧制御ブロック ... 12
2.2.4 キャパシタ電圧アンバランス補償ブロック ... 13
第3章 シミュレーションによる有効性の検証 ... 14
3.1 三相3線式システムにおける検証 ... 14
3.1.1 シミュレーション条件 ... 14
3.1.2 シミュレーション結果 ... 17
3.2 三相4線式システムにおける検証 ... 20
3.2.1 シミュレーション条件 ... 20
3.2.2 シミュレーション結果 ... 23
3.3 システムの安定性の判別及び補償性能の検証 ... 26
3.3.1 伝達関数の導出 ... 26
3.3.2 安定性の判別... 28
3.3.3 補償性能の検証 ... 36
第4章 キャパシタ容量算定法 ... 47
4.1 線形負荷時における検証 ... 48
目次
4.1.1 算定手法 ... 48
4.1.2 算定条件 ... 52
4.1.3 算定結果 ... 53
4.1.4 算定手法の評価 ... 54
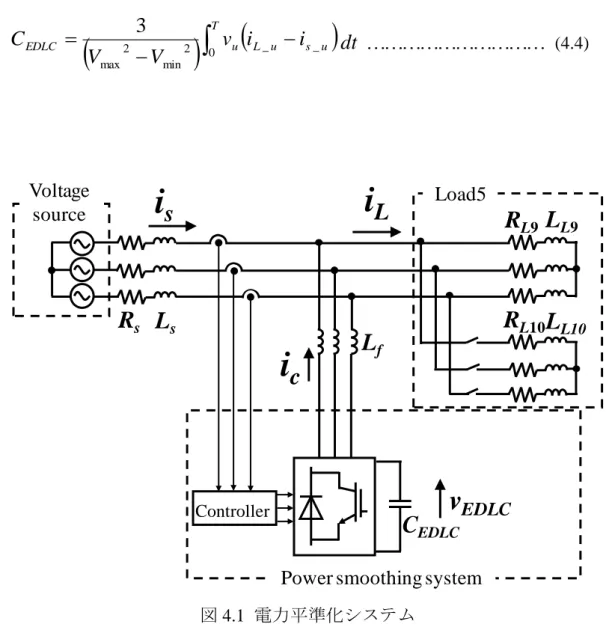
4.2 非線形負荷時における検証 ... 56
4.2.1 算定手法 ... 56
4.2.2 算定条件 ... 58
4.2.3 算定結果 ... 60
4.2.4 算定手法の評価 ... 61
第5章 結言 ... 62
参考文献 ... 64
論文目録 ... 65
謝辞 ... 66
第1章 諸言
第1章 緒言
1.1 研究の背景と目的
近年,化石燃料の消費量の増加に伴う地球温暖化や大気汚染などの問題が深 刻化している。これらの問題の対策として,風力発電や太陽光発電などの自然 エネルギー発電システムの導入が進められている。これらの自然エネルギー発 電システムを分散型電源として用い,電力を供給するシステムとしてマイクロ グリッドが注目されている[1]。
マイクログリッドとは分散型電源や需要家,電力貯蔵装置などを電力線によ り接続し,需要状況に合わせて需給制御を行う小規模の電力供給網である。本 研究では特に,商用電力系統と連系して運用する系統連系型マイクログリッド に注目し,その概念図を図 1.1 に示す。このシステムの利点として,マイクロ グリッド内の多彩な分散型電源を一括制御できることや,系統と連系して運用 することによりエネルギー供給の安定性が向上することなどが挙げられる。
また,通常マイクログリッド内の負荷変動に対しては変動に合わせて系統側 の発電機の出力を調整することで対応している。負荷変動は大きく分けて短周 期(数分程度以内),長周期(数分程度以上)の2つに分けられるが,長周期の負荷 変動は系統の発電量調整で主に解決される。しかし,短周期の負荷変動につい ては系統側では対応が困難なため,需要家側で対策を講じる必要がある。
そこで,マイクログリッドと系統との間に電力補償装置を接続し,変動電力 を平準化する必要がある。一般的に,電力補償装置の構成はインバータの直流 電圧源に大容量の電力貯蔵装置を用いる。代表的な電力貯蔵装置とその特長を 表1.1に示す。これらの電力貯蔵装置は,容量や出力時間などにより表1.2に示 す用途別に用いられる。また,図 1.2 に各電力貯蔵装置の動作時間及びその用
第1章 諸言
途を示す。数秒程度以上の電力変動に対して有効な電力貯蔵装置としてフライ ホイール電力貯蔵装置(以下,FWES:Flywheel Energy Storage equipment)等が挙 げられるが,数秒程度未満の変動に対する応答性には問題がある。そのため,
より高品質な電力を供給するという観点から,さらに応答性に優れた電力貯蔵 装置が必要となる。
そこで本研究では,電力貯蔵装置として電気二重層キャパシタ(以下,EDLC: Electric Double Layer Capacitor)に注目する。従来,EDLCは主に瞬時電圧低下補
償[4] [5]に用いられており,FWES と比較して単位面積当たりのエネルギー密度
は低いが,応答性は優れているという特長を持つことから,電力平準化装置と して短周期の電力変動に対応可能であると考えられる。そのため,EDLC を用 いた電力補償装置はFWESでは補償できない周波数帯域の変動電力を補償する ことができ,従来提案されているFWESを用いた補償装置[6]などと組み合わせ ることで補償帯域が広がると考えられる。
前研究者によって,マイクログリッドを模擬する負荷が三相平衡な線形負荷 である場合に,FWES や二次電池では対応できないと考えられる数秒程度未満 の電力脈動に対する有効性に加え,電源力率補償の有効性については確認され ている。
本論文では,電力脈動補償及び電源力率補償に加えて,高調波抑制制御,イ ンバータ直流リンク電圧制御の有効性を明らかにする。さらに,システムを三 相4線式に拡張した際に問題となる零相電流の抑制制御,零相電流の影響によ り生じる直流リンク部のキャパシタ電圧のアンバランス補償制御の有効性を明 らかにする。また,システムを設計する際に重要となるシステムの安定性の判 別及び補償性能の検証を行う。
第1章 諸言
キャパシタの容量を算定する手法について述べ,その有効性をシミュレーショ ンにより検証する。
電力需給制御 システム
分散型電源 需要家 電力貯蔵装置
電力線
分散型電源
商用電力系統
マイクログリッド
図1.1 系統連系型マイクログリッドの概念図
第1章 諸言
表1.1 代表的な電力貯蔵装置[1]
二次電池 (蓄電池)
超電導 電力貯蔵装置
(SMES)
フライホイール
電気二重層 キャパシタ
(EDLC) 貯蔵エネルギー 化学エネルギー 磁気エネルギー 回転エネルギー 静電エネルギー 主な用途 負荷平準化
受電電力平準化 発電電力平準化 非常用電源 瞬低・停電補償
瞬低補償 電力系統制御
瞬低・停電補償 電力系統制御
発電電力平準化 瞬低・停電補償
主な設置箇所 工場、ビル、通 信基地局、変電 所、発電所
(工場、変電所) ビル、変電所 工場、(発電所)
実績台数 多数 (数台) 数十台 100台程度
容量 小~大 小 小~大 小
出力 小~大 大 小~大 小~大
出力時間 数秒~数時間 0.1秒~数秒 数秒~数分 0.1秒~数分
表1.2 電力貯蔵装置の主な用途[1]
主な用途 内容
1 負荷平準化 電力会社が変電所構内等に電力補償装置を設置して、夜間の軽負 荷時に電力を貯蔵し昼間に放電し、電力需要のピークを抑制する。
2 受電電力平準化 需要家が受電設備の一部として電力貯蔵設備を設置して、夜間に電 力を貯蔵し昼間に放電することにより、契約電力のピークを低減する。
3 発電電力平準化
太陽光や風力等の自然エネルギーによる発電において、気象条件 によって異なる発電量を平準化して電源を安定化したり、低負荷時に 活用できなかった電力を貯蔵し、電力需要のピーク時に使う。
4 非常用電源 停電時に必要最低限の電源を供給する。
5 瞬低・停電補償 瞬時電圧低下や停電時に必要な電力を補償する。
6 電力系統制御 系統安定化や負荷変動補償・周波数調整用として使用する。
第1章 諸言
0.1秒 1秒 10秒 1分 10分 1時間 10時間
超電導電力貯蔵装置 SMES
電気二重層キャパシタ フライホイール
二次電池
瞬低・停電補償
電力系統制御 発電電力平準化
非常用電源
負荷平準化
受電電力平準化
図1.2 電力貯蔵装置の動作時間と用途[2]
第1章 諸言
1.2 本論文の構成
本論文は,以下のように構成されている。
2 章では,電力平準化システムの構成について述べた後,各制御手法につい て詳しく述べる。
3 章では,シミュレーションによって本研究で提案する制御の有効性を明ら かにする。また,システムの伝達関数を導出することにより,安定性の判別及 び制御性能を検証する。
4 章では,キャパシタ容量算定法として,補償に必要なエネルギー量から電 力平準化装置に用いるEDLCの適切なキャパシタ容量を算定する手法について 述べ,シミュレーションによりその有効性を検証する。
5章では,本研究の成果をまとめ,今後の課題について述べる。
第2章 電力平準化システム
第2章 電力平準化システム
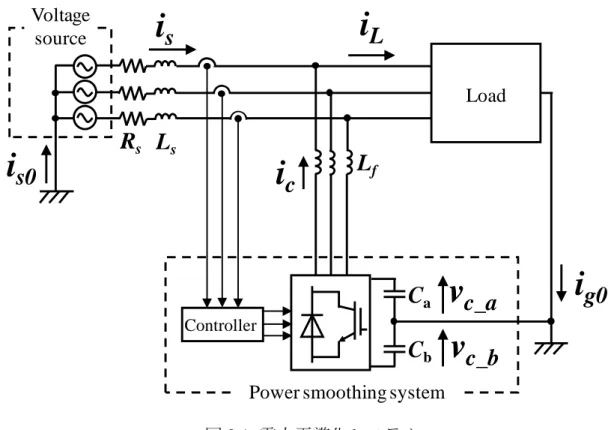
2.1 電力平準化システムの概要
図2.1に電力平準化システムを示す。本システムでは,電源と線路インピーダ ンス Rs,Lsにより商用電力系統を模擬し,負荷に変動を生じさせることでマイ クログリッドの電力変動を模擬する。電源から負荷に印加される電圧は一定で あるため,電力の平準化は電流を平準化することと同等とみなすことができる。
また,インバータのスイッチングに起因するキャリア成分を補償電流に重畳さ せないため,フィルタ用リアクトルLfを接続する。
本システムにおいて負荷が高調波発生源を含む負荷である場合,電源電流に 高調波が含まれる。また三相不平衡な負荷である場合には,電源電流が三相不 平衡となり,負荷側の中性線に零相電流 ig0が流れるといった問題が生じる。さ らに,本システムでは零相電流 ig0を補償するため,インバータ直流リンク部の 中性点に負荷側の中性線を接続するが,中性点電位の変動によって上下のキャ パシタ電圧にアンバランスが生じる。
またインバータの直流リンク電圧は,電力平準化装置の電力の出し入れによ り常に変動するため,状況によってはキャパシタ電圧が定格電圧を超えたり,
装置が電力を補償するために必要な直流リンク電圧を下回る恐れがある。
これらの課題に対し,本システムでは次節で説明する制御手法により,必要 な補償電流を出力することにより対応する。電源電流及び直流リンク部のキャ パシタ電圧を検出し,制御器によってインバータへの指令値を作成する。電力 平準化装置から出力した補償電流 ic を連系点に注入することで,目的とする補 償効果を実現する。
第2章 電力平準化システム
i s0
i L
L
fController Voltage
source
i s
i c
L
sR
sC
aC
bPower smoothing system
v c_a v c_b
i g0
Load
図2.1 電力平準化システム
第2章 電力平準化システム
2.2 制御手法
本システムの制御ブロック図を図2.2に示す。本節ではまず,制御に用いる座 標変換であるd-q-0変換について説明を述べた後に,各制御ブロックについて詳 しく説明する。
Δiq Δid Δi0
K1_d
PI1
K1_0
uvw /
dq0 + -
is_d is_q is_0
HPF
LPF1 vc_a vc_b
is
is_0 ig_0
iL
Voltage Load sourece
3 3
3
LPF3 ++ Vc_ref
- +
PI3 -+
v0ref vqref vdref
vuref vvref vwref
dq0 / uvw
ic
直流リンク電圧制御ブロック 電流制御ブロック
LPF2
+
PI2 - +
キャパシタ電圧アンバランス補償ブロック
ic_pi2
LPF2
+
ic_pi3
ic_0
図2.2 制御ブロック図
第2章 電力平準化システム
2.2.1 d-q-0変換
電源電圧の位相をθとすると,d-q-0変換の式は次式のように表わせる。
w v u q
d
i i i
i i i
2 1 2
1 2
1
3 sin 2
3 sin 2
sin
3 cos 2
3 cos 2
cos 3 2
0
(2.1)
d軸には,基本波電流の有効電力に関する成分が直流成分として,基本波以外 の高調波成分や逆相成分は交流成分として現れる。
q軸には,基本波電流の無効電力に関する成分が直流成分として,基本波以外 の高調波成分や逆相成分は交流成分として現れる。
0軸には,三相電流を足し合わせて3で割った成分,つまり零相電流の成分が そのまま現れる。
このようにd-q-0変換を行うことによって,d軸,q軸,0軸をぞれぞれ独立に 扱うことができる。
第2章 電力平準化システム
2.2.2 電流制御ブロック
図2.2の電流制御ブロックでは,負荷変動に伴う電力脈動,高調波発生源によ り生じる高調波電流,不平衡負荷により生じる不平衡電流の補償を行うほか,
無効電流の発生により低下する電源力率の補償,さらに三相 4 線式のシステム で問題となる零相電流の補償を行う。
まず,電流センサにより検出した電源電流 isを d-q-0 変換し,d 軸,q 軸,0 軸成分を導出する。
d軸成分is_dについては,HPFを用いて基本波電流以外の成分,つまり電力脈 動の成分や高調波成分,不平衡により生じる逆相成分を導出し,比例制御し,d 軸電圧指令値vdrefとする。また,直流リンク電圧制御ブロックの出力であるic_pi3
の操作量が与えられているが,この点については2.2.3で説明する。
q軸成分is_qについては,基本波無効電流成分も含め,高調波成分及び逆相成 分が導出されるため,PI制御を行い,q軸電圧指令値vqrefとする。
0軸成分is_0については,電源側への零相電流の発生を抑制するため,導出さ れる零相電流成分を比例制御し,0軸電圧指令値v0refとする。また,キャパシタ 電圧アンバランス補償ブロックの出力である ic_pi2の操作量が与えられているが,
この点については2.2.4に説明する。
なお d 軸及び 0 軸には,それぞれ直流リンク電圧制御ブロック,キャパシタ 電圧アンバランス補償ブロックの PI制御の出力が与えられることを考慮し,PI 制御の並列動作を避けるために,電流制御ブロックには比例制御を用いている。
第2章 電力平準化システム
2.2.3 直流リンク電圧制御ブロック
このブロックでは,インバータの直流リンク部のキャパシタ電圧が装置の補 償可能電圧範囲内に収まるように制御する。
まず,検出した直流リンク部のキャパシタCa,Cbの電圧vc_a,vc_bを足し合わ せることで直流リンク電圧を算出する。ここで負荷変動による直流リンク電圧 の脈動を除去するため,導出した直流リンク電圧をLPF3に通し,直流リンク電 圧の動作中心電圧を導出する。そして,動作中心電圧と指令値Vc_refとの偏差を PI制御し,その操作量ic_pi3を有効電力に関する成分を扱うd軸に与えることで インバータの電力を制御し,リンク電圧の動作中心電圧を一定に制御する。な お,リンク電圧制御ブロックに用いる PI 制御器 PI3は,脈動補償等を行ってい る電流制御ブロックの制御に大きな影響を及ぼさないために,応答を遅らせて おり,数十秒単位の長周期で制御する。
第2章 電力平準化システム
2.2.4 キャパシタ電圧アンバランス補償ブロック
このブロックでは,三相 4 線式システムの構成上生じる直流リンク部の上下 のキャパシタ電圧のアンバランスを補償する。
まず,検出した直流リンク部のキャパシタCa,Cbの電圧vc_a,vc_bの脈動成分 をLPF2に通し,2つの電圧の偏差をとる。その偏差をPI制御し,その操作量ic_pi2 を,零相成分を扱う 0 軸に与えることで偏差を 0 に制御する。なお,リンク電 圧制御ブロックの場合と同様に,PI制御器PI2は,零相電流補償を行っている電 流制御ブロックの制御に大きな影響を及ぼさないために,応答を遅らせており,
数十秒単位の長周期で制御する。
第3章 シミュレーションによる有効性の検証
第3章 シミュレーションによる有効性の検証
3.1 三相3線式システムにおける検証
本節では,三相 3 線式システムにおける電力脈動補償及び高調波抑制制御,
電源力率補償,直流リンク電圧制御の有効性についてシミュレーションにより 検証する。
3.1.1 シミュレーション条件
検証に用いる電力平準化システム及び制御ブロック図を図 3.1,3.2 に,シス テムパラメータ,制御パラメータをそれぞれ表 3.1,3.2 に示す。なお,K1_d, K1_0,PI1ゲインはインバータ出力電圧を考慮した値とする。
負荷は高調波発生源としてコンデンサインプット型整流負荷を 2 台並列接続 し,並列負荷の接続状態をスイッチにより変化させることで負荷変動を生じさ せる。なお,負荷変動は 0.5s 毎に行い,直流リンク電圧制御は 30s 時から開始 するものとする。
第3章 シミュレーションによる有効性の検証
i L
L
fController Voltage
source
i s
i c
L
L1L
sR
sC
aC
bPower smoothing system
v
c_av
c_bL
L2C
L1C
L2R
L1R
L2Load1
図3.1 電力平準化システム(三相3線式)
Δiq Δid
K1_d
PI1
uvw /
dq + -
is_d is_q
HPF LPF1
vc_b vc_a
is iL
Voltage Load sourece
3 3
3
LPF3 ++ Vc_ref
+ -
PI3 -+
vqref vdref
vuref vvref vwref
dq / uvw
ic
ic_pi3
直流リンク電圧制御ブロック 電流制御ブロック
図3.2 制御ブロック図(三相3線式)
第3章 シミュレーションによる有効性の検証
表3.1 システムパラメータ
電源電圧 50[V],50[Hz]
線路インピーダンス: Rs,Ls 0.13[mΩ],0.23[mH]
フィルタリアクトル: Lf 5[mH]
EDLC (単体)
静電容量 4.5[F]
初期電圧 145[V]
負荷
ACリアクトル:LL1(LL2) 3[mH]
コンデンサインプット型整流回路
:RL1,CL1(RL2,CL2) 15[Ω], 200[μF]
表3.2 制御パラメータ
LPF1カットオフ周波数 0.01[Hz]
K1_dゲイン 比例ゲイン 28.5[V/A]
K1_0ゲイン 比例ゲイン 28.5[V/A]
PI1ゲイン 比例ゲイン 28.5[V/A]
積分ゲイン 285[V/A・s]
LPF3カットオフ周波数 0. 1[Hz]
PI3ゲイン 比例ゲイン 1.0[A/V]
積分ゲイン 0.1[A/V・s]
直流リンク電圧指令値:Vc_ref 285[V]
キャリア周波数 10[kHz]
第3章 シミュレーションによる有効性の検証
3.1.2 シミュレーション結果
電力脈動補償及び高調波抑制制御結果,電源力率補償結果,直流リンク電圧制 御結果をそれぞれ図3.3,図3.4,図3.5に示す。
まず,電力脈動補償及び高調波抑制制御結果について検証する。図3.3は負荷 電流及び電源電流の負荷変動前後の挙動について観測した波形及び FFT 解析結 果である。図3.3(a)より,負荷電流波形は負荷切替時に振幅が急峻に変化してお り,また高調波が発生していることが確認できる。一方,図3.3(b)より電源電流 波形は負荷切替による振幅の急峻な変動が生じておらず,高調波に関してもそ の発生が抑制されている。なお,歪み率THD(Total Harmonic Distortion)で比較す ると,負荷電流は 21.4%であるのに対し,電源電流では 6.5%であり,高調波抑 制制御により14.9%低下する。
次に電源力率補償結果,つまり電源側の無効電流の発生を抑制できているか 検証する。図 3.4は負荷側の無効電流 iL_q及び電源側の無効電流 is_qの波形であ る。図3.4よりiL_qには直流分,つまり基本波の無効電流が発生している。なお,
脈動している成分は高調波成分である。一方,is_qは直流分の発生が抑制されて いることから,電源側の力率が1に補償されていることがわかる。
最後に直流リンク電圧制御結果について検証する。図3.4は直流リンク部のキ ャパシタCa,Cbの電圧vc_a,vc_bを足し合わせた波形である。この結果より,直 流リンク電圧を指令値である 285V に制御されていることが確認できる。また,
このように長周期的に指令値に制御することで,本来の目的である電力脈動補 償に影響を与えないという条件も満たしている。
これらの結果から,三相 3 線式システムにおける電力脈動補償及び高調波抑 制制御,電源力率補償,直流リンク電圧制御の有効性を確認した。また,電力 脈動及び高調波成分を低減し,電源力率を 1 に補償できていることから,電力
第3章 シミュレーションによる有効性の検証
品質向上の目的を達成できていることを確認した。
0 0.04 0.08 Time[s]
0 10.0
-10.0 -5.0
5.0
i
L_u[A ] i
L_u[A ]
Load switching
6.0
2.0 4.0 8.0
0 0 200 400 600 Frequency[Hz]
(a) u相負荷電流iL_u
0 200 400 600 Frequency[Hz]
0 0.04 0.08 Time[s]
0 10.0
-10.0 -5.0
5.0 6.0
2.0 4.0 8.0
0
i
s_u[A ] i
s_u[A ]
Load switching
(b) u相電源電流is_u
図3.3 電力脈動補償及び高調波抑制制御結果
第3章 シミュレーションによる有効性の検証
i
L_q, i
s_q[A ]
0 4.0
-2.0 6.0
2.0
Time[s]
0 0.04 0.08
i
L_qi
s_qLoad switching
図3.4 電源力率補償結果
v
c_a+ v
c_b[V ]
286 290
282 284 288
Time[s]
20 100 200 300 400
V
c_refStart of DC link voltage control
v
c_a+ v
c_b図3.5 直流リンク電圧制御結果
第3章 シミュレーションによる有効性の検証
3.2 三相4線式システムにおける検証
本節では,三相 4 線式システムにおける不平衡電流及び零相電流補償,キャ パシタ電圧アンバランス制御の有効性についてシミュレーションにより検証す る。
3.2.1 シミュレーション条件
検証に用いる電力平準化システム及び制御ブロック図を図3.6,3.7に,システ ムパラメータ,制御パラメータをそれぞれ表 3.3,3.4 に示す。負荷は不平衡な RL負荷を用い,負荷側中性線に零相電流が発生する構成とし,さらに並列負荷 に半波整流負荷を用いることで零相電流に直流電流を生じさせる。なお,三相3 線式の検証と同様に負荷変動を 0.5s 毎に生じさせるものとする。また,キャパ シタ電圧アンバランス補償制御は40s時,直流リンク電圧制御は60s時から開始 する。
第3章 シミュレーションによる有効性の検証
i
s0i L
L
fi s
i c
L
L3L
sR
sR
L3C
aC
bv
c_av
c_bi
g0L
L4R
L4Voltage source
Power smoothing system Controller
Load2
図3.6 電力平準化システム(三相4線式)
Δiq Δid Δi0
K1_d
PI1
K1_0
uvw / dq0
+ -
is_d is_q is_0
HPF
LPF1 vc_a vc_b
is
is_0 ig_0
iL
Voltage Load sourece
3 3
3
LPF3 ++ Vc_ref
+ -
PI3 -+
v0ref vqref vdref
vuref vvref vwref
dq0 / uvw
ic
直流リンク電圧制御ブロック 電流制御ブロック
LPF2
+
PI2 - +
キャパシタ電圧アンバランス補償ブロック
ic_pi2
LPF2
+
ic_pi3
ic_0
図3.7 制御ブロック図(三相4線式)
第3章 シミュレーションによる有効性の検証
表3.3 システムパラメータ
電源電圧 50[V],50[Hz]
線路インピーダンス: Rs,Ls 0.13[mΩ],0.23[mH]
フィルタリアクトル: Lf 5[mH]
EDLC (単体)
静電容量 4.5[F]
初期電圧 145[V]
負荷 RL3,LL3(三相不平衡)
8[Ω],4[mH](u相) 20[Ω],10[mH] (v相)
2[Ω],1[mH] (w相)
RL4,LL4 10[Ω], 5[mH]
表3.4 制御パラメータ
LPF1カットオフ周波数 0.01[Hz]
K1_dゲイン 比例ゲイン 28.5[V/A]
K1_0ゲイン 比例ゲイン 28.5[V/A]
PI1ゲイン 比例ゲイン 28.5[V/A]
積分ゲイン 285[V/A・s]
LPF2カットオフ周波数 0. 1[Hz]
PI2ゲイン 比例ゲイン 0.1[A/V]
積分ゲイン 0.005[A/V・s]
LPF3カットオフ周波数 0. 1[Hz]
PI3ゲイン 比例ゲイン 1.0[A/V]
積分ゲイン 0.1[A/V・s]
直流リンク電圧指令値:Vc_ref 285[V]
キャリア周波数 10[kHz]
第3章 シミュレーションによる有効性の検証
3.2.2 シミュレーション結果
不平衡電流補償結果,零相電流補償結果,キャパシタ電圧アンバランス補償 結果をそれぞれ図3.8,図3.9,図3.10に示す。
図 3.8 は三相負荷電流及び電源電流の負荷変動前後の挙動について観測した 波形である。図3.8(a)より,負荷電流波形は三相不平衡となっていることが確認 できる。一方,図 3.8(b)より電源電流波形は三相平衡に補償できている。また,
負荷変動による振幅変化も抑制されている。
次に零相電流補償結果について検証する。図3.9は負荷側の中性線を流れる零 相電流ig0及び電源側の零相電流is0を観測した波形である。図3.9より,ig0は振 幅およそ 17A 程度の電流が発生している。一方,is0はわずかながら直流電流が 生じているが,零相電流が大きく抑制されていることを確認した。
最後にキャパシタ電圧アンバランス補償結果について検証する。図 3.10 は直 流リンク部のキャパシタCa,Cbの電圧vc_a,vc_bの偏差を取り,直流リンク電圧 の平均値で割って百分率表示した波形である。キャパシタ電圧アンバランス補 償を開始するまでは,キャパシタ電圧の偏差が徐々に大きくなっているが,補 償を行うことによって偏差が0に制御されていることを確認できる。また,60s 時から開始した直流リンク電圧制御についても指令値に制御できていることを 確認している。なお,キャパシタ電圧アンバランス補償についても,直流リン ク電圧制御と同様に,長周期的に制御することで電流制御に影響を与えないと いう条件を満たしている。
これらの結果から,三相 4 線式システムにおける電力脈動補償及び不平衡電 流補償,零相電流補償,キャパシタ電圧アンバランス補償の有効性を確認した。
また,電力脈動を低減し,不平衡電流補償,電源側の零相電流の発生を抑制で きていることから,電力品質向上の目的を達成できていることを確認した。
第3章 シミュレーションによる有効性の検証
Load switching
0 20.0
-20.0 -10.0 10.0
i
L[A ] i
L_ui
L_vi
L_w30.0
-30.0
0 0.02 0.04 0.06 0.08 Time[s]
(a) 負荷電流iL
0 0.02 0.04 0.06 0.08 Time[s]
0 20.0
-20.0 -10.0 10.0
i
s_ui
s_vi
s_wi
s[A ]
30.0
-30.0
Load switching
(b) 電源電流is
図3.8 不平衡電流補償結果
第3章 シミュレーションによる有効性の検証
Load switching
0 20.0
-20.0 -10.0 10.0
i
s0, i
g0[A ]
i
s0i
g00 0.02 0.04 0.06 0.08 Time[s]
図3.9 零相電流補償結果
20 100 200 300 400 Time[s]
-2.0 2.0
-4.0 0
{( v
c_a+ v
c_b) / v
c_ave} × 100 [% ]
1.0
-1.0
-3.0
Start of unbalanced voltage compensation
図3.10 キャパシタ電圧アンバランス補償結果
第3章 シミュレーションによる有効性の検証
3.3 システムの安定性の判別及び補償性能の検証
3.3.1 伝達関数の導出
電力平準化システムの安定性の判別及び補償性能の検証を行うために,まず はシステムの伝達関数を導出する。導出した伝達関数を用いてナイキスト線図 及びボード線図を描き,検証を行う。
d 軸,q 軸,0 軸それぞれのブロック線図を図 3.11,3.12,3.13に示す。ここ でキャパシタ電圧の変動はキャパシタに電流が流れ込むか,流れ出すことで生 じるため,電圧変動は式(3.1)のように表わせる。よって電流の変化に対する電圧 の変化は式(3.2)となる。
i dt
vc C1 c
(3.1)
Cs s
I s V
c
c 1
) (
) (
(3.2)
また,INV ブロックはインバータを理想的な増幅器として扱い,直流リンク 電圧と変調率との関係から導出したゲインを掛けることで表現する。直流リン ク電圧を Vcとすると,インバータ出力電圧はインバータへの電圧指令値をキャ リアの振幅で除した変調率に,
2 Vc
を乗じた電圧となる。よって,直流リンク電 圧が285Vに制御されていることを前提とすると,±10Vの三角波でキャリア比 較を行っていることから,電圧指令値が 1V 上がればインバータ出力電圧が
14.25V 上がることとなる。したがって,INV ブロックのゲインは 14.25 と設定
する。
なお,G(s)はインバータ出力電圧からみた補償電流の伝達関数,つまり回路の
アドミタンスである。
第3章 シミュレーションによる有効性の検証
i
L_di
c_d-
+
s2+2ζω1s s2+2ζω1s+ω12 K1_d
i
s_dG(s)
Cs
1 ω32
s2+2ζω3s+ω32 PI3
INV +
-
Δv
ci
c_pi3Δv
c_refΔi
dv
dref直流リンク電圧制御ブロック
電流制御ブロック
図3.11 d軸制御ブロック線図
i
L_qi
c_q-
+
PI1
i
s_qG(s) INV
v
qrefΔi
q電流制御ブロック
図3.12 q軸制御ブロック線図
i
g_0i
c_0- +
K1_0
i
s_0G(s)
Cas 1
ω22 s2+2ζω2s+ω22
PI2
INV +
i
c_pi2Δi
0v
0ref電流制御ブロック
Cbs 1
ω22 s2+2ζω2s+ω22
+ -
キャパシタ電圧アンバランス補償ブロック
+
図3.13 0軸制御ブロック線図
第3章 シミュレーションによる有効性の検証
3.3.2 安定性の判別
d 軸,q 軸,0 軸それぞれの制御ブロックに対して,その制御の安定性につい て開ループナイキスト線図によって判別する。表3.5にシステムパラメータの値 を,表3.6にそれぞれの検証において変化させていない制御パラメータの値を示 す。なお,d軸の直流リンク電圧制御ブロック及び0軸のキャパシタ電圧アンバ ランス補償ブロックのPI制御器のゲインは電流制御に影響を与えないような値 に設定している。
d軸,q軸,0軸のナイキスト線図をそれぞれ図3.14,3.15,3.16に示す。d軸 及び 0 軸のナイキスト線図については,(a)にゲインの変化に対する軌跡の変化 を,(b)に(-1,j0)点付近を観測した図を示す。なお,d 軸及び 0軸については開 ループ伝達関数の極が右反平面に 2 つ存在するため,拡張ナイキストの安定判 別法[7]を適用して安定判別を行う。そのため,d軸及び0軸については,ωを-∞
から+∞まで変化させた軌跡を示すこととする。
第3章 シミュレーションによる有効性の検証
表3.5 システムパラメータの値
線路インピーダンス: Rs,Ls 0.13[mΩ],0.23[mH]
フィルタリアクトル: Lf 5[mH]
Ca,Cb 静電容量 4.5[F]
表3.6 制御パラメータの値
LPF1カットオフ周波数:f1 0.01[Hz]
LPF2カットオフ周波数:f2 0. 1[Hz]
PI2ゲイン 比例ゲイン 0.1[A/V]
積分ゲイン 0.005[A/V・s]
LPF3カットオフ周波数:f3 0. 1[Hz]
PI3ゲイン 比例ゲイン 1.0[A/V]
積分ゲイン 0.1[A/V・s]
減衰率:ζ 0.7
第3章 シミュレーションによる有効性の検証
d軸は,電流制御ブロックに対して直流リンク電圧制御ブロックの操作量が外 乱として入ってくる構成となっており,ここでは本来の目的である脈動制御を 行う電流制御ブロックの比例ゲイン K1_dをどの程度まで上げられるかを検証し
た。図 3.14(a)より,ゲインを上げることによって,より大きな軌跡を描いてい
ることがわかるが,図3.14 (b)より(-1,j0)点付近についてはほとんど軌跡が変化 しないことを確認した。このナイキスト線図に拡張ナイキストの安定判別法を 適用し,安定判別を行う。開ループ伝達関数は右反平面の極の数が 2 つ存在し ており,ω を-∞から+∞まで変化させたときに軌跡が(-1,j0)点を反時計回りに 2 回まわっていることが確認できる。よって,与えられた比例ゲイン K1_dの条件 ではd軸制御ブロックが安定と判別できる。
なお,K1_d<0.0043[V/A]の際に不安定となり,それ以上のゲインを用いれば制 御ブロックが安定と判別された。しかしながら,実際のシステムでは K1_dを大 きくしていくとインバータへの電圧指令値がキャリアの振幅を超え,飽和して しまう可能性があるため,実用上は指令値の飽和を考慮して設計する必要があ る。なお,補償性能を考慮したゲイン設計を行うという観点においては,不安 定となるゲインの領域の値は用いることは実用上考えられない。
さらに,補償対象の成分に対する補償性能を考慮したゲイン設定が必要であ り,次節で説明する。
第3章 シミュレーションによる有効性の検証
Imaginary Axis
Real Axis
K
1_d=28.5[V/A]
K
1_d=142.5[V/A]
K
1_d=285[V/A]
(a) K1の変化による軌跡の変化
Imaginary Axis
Real Axis
ω = 0 ω = -∞
ω = +∞
(b) (-1,j0)点付近
図3.14 開ループナイキスト線図(d軸ブロック)
第3章 シミュレーションによる有効性の検証
q軸は,電源力率改善のための無効電流を抑制する電流制御ブロックのみの構 成である。なお,q 軸開ループ伝達関数の極はすべて左反平面に存在するため,
ナイキスト線図を描いた際にその軌跡が(-1,j0)点を左側に見れば安定である。
図3.15よりナイキスト線図により描いた軌跡が(-1,j0)点を左側に見ているた め安定と判別できる。また,電流制御ブロックのPI制御器のゲインを変更して も制御系は安定であることから,補償性能とインバータへの電圧指令値の飽和 を考慮してゲインを設定すればよいと考えられる。
比例ゲイン: 28.5[V/A],積分ゲイン: 285[V/A・s]
比例ゲイン:71.25[V/A],積分ゲイン:712.5[V/A・s]
比例ゲイン:71.25[V/A],積分ゲイン:142.5[V/A・s]
Imaginary Axis
Real Axis
ω = +∞
ω = 0
図3.15 開ループナイキスト線図(q軸ブロック)