縦渦による超音速混合促進機構に関する研究
著者
近藤 暁
内容記述
学位授与大学: Osaka Prefecture University(大阪
府立大学), 学位の種類: 博士(工学), 学位記番号:
論工第1243号, 学位授与年月日: 2010-03-31, 指導
教員: 新井隆景.
大阪府立大学博士論文
縦渦による超音速混合促進機構に関する研究
2010 年 2 月
目次
第 1 章 序論
1 1.1 研究背景 1 1.2 超音速縦渦 2 1.3 混合評価手法 3 1.4 本研究の構成 4第 2 章 実験装置
8 2.1 超音速吸い込み式小型風洞 8 2.2 縦渦導入デバイス 8 2.3 シュリーレン光学系 9 2.4 PIV 計測装置 9 2.5 熱線流速計 10 2.6 較正用風洞(ソニックノズル) 11第 3 章 混合評価手法
16 3.1 熱線流速計の原理 16 3.1.1 熱線流速計 16 3.1.2 熱線の動特性 18 3.1.3 定電圧型熱線流速計 19 3.1.4 熱線の応答遅れの補償 20 3.2 2線式熱線流速計による混合評価手法 21 3.2.1 濃度・質量流束計測原理 21 3.2.2 各熱線が捉える流れの同一性 22 3.3 濃度・質量流束に関する熱線の較正 23 3.3.1 熱線の較正方法 23 3.3.2 較正結果 25 3.3.3 濃度・質量流束計測で見込まれる誤差 26 3.4 2次元超音速混合層の計測 27 3.4.1 計測対象 27 3.4.2 超音速混合層の平均特性 28 3.4.3 超音速混合層中の濃度・質量流束変動 28 3.5 変動が大きい場合の PDR 算出方法 29第 4 章 超音速縦渦による混合過程
44 4.1 計測対象 44 4.2 超音速縦渦の構造 44 4.2.1 実験結果 44 4.2.2 縦渦を取り巻く渦輪状構造 45 4.2.3 縦渦の形成と成長過程 47 4.2.4 縦渦の崩壊過程 48 4.3 濃度・質量流束同時定量計測 48 4.4 まとめ 49第 5 章 超音速縦渦による混合領域の拡大と縦渦の崩壊
62 5.1 計測対象 62 5.2 流れの可視化 63 5.2.1 変動領域の高さ方向の拡大 64 5.2.2 渦輪状構造の強さ 64 5.3 ステレオ PIV 計測結果 65 5.4 変動領域の拡大機構 66 5.5 各実験パラメータが流れに及ぼす影響 68 5.5.1 ランプ角が流れに及ぼす影響 68 5.5.2 バックステップからの噴射の種類が流れに及ぼす影響 69 5.5.3 主流マッハ数が流れに及ぼす影響 70 5.5.4 壁面粗度が流れに及ぼす影響 70 5.6 縦渦の崩壊 71 5.7 まとめ 72第6章 結論
119参考文献
123謝辞
128第 1 章 序論
1.1 研究背景
次世代の極超音速輸送機や宇宙往還機の極超音速飛行時の推進機関としてスクラムジェ ットエンジン(Supersonic Combustion RAMJET ENGINE)が有望視されている.この極超音 速推進用エンジンは極超音速気流を飛行マッハ数の3分の1程度のマッハ数に減速して超 音速のまま燃焼器に導き,水素等の燃料を噴射して超音速状態のまま燃焼させる点が特徴 である.従来のジェットエンジンやラムジェットエンジンなどの推進機関は吸入空気を亜 音速まで減速させてから燃焼を行なうが,これを飛行マッハ数 6 以上の極超音速飛行に適 用すると強い衝撃波が発生し,総圧損失が増すとともに著しい温度上昇による燃焼生成物 の解離が生じ,性能が低下する1).また温度,圧力が高くなりエンジン構造材の冷却,強度 に対する要求が増す.吸入空気を圧縮する際,その減速を飛行マッハ数の3分の1程度の 超音速の範囲内に留めることで,超音速のまま燃焼を行なうスクラムジェットエンジンは このような問題を解決する有効な手段であると考えられている2). しかし,気流流速が音速を超えるスクラムジェットエンジン燃焼器内での流入空気滞留 時間は1 ms 程度と極めて短い.それゆえ,流入空気と燃料である水素を極めて速やかに混 合・燃焼させるための超音速混合促進制御技術がスクラムジェットエンジン開発の技術的 な鍵となっている.いうまでもなく燃料と空気中の酸素が緊密に接触しなければ燃焼は起 きない.従って,混合促進には,この接触面積を増加させるための流れの制御が求められ る.このような流体混合の促進法としては乱流渦の利用がもっとも合理的であると考えら れる.実際,異種流体の隣接する面において,乱流のエネルギーカスケード過程により大 きいスケールの渦から小スケールの渦が無数に生成されると,接触面積が飛躍的に増加し, 混合・燃焼は一気に進むはずである.しかし,超音速流では,撹乱の移流マッハ数の増加 とともに圧縮性の影響が顕著に表れ,混合に寄与する撹乱の成長や乱流渦の生成が極めて 低く抑えられてしまう3, 4).そのため,自然のままでは混合能が著しく低下するという大き な困難に直面することになる.これを解決するためには超音速域での混合に効果的な乱流 渦を見出し,それを人為的に生成する必要がある.このような超音速混合促進技術は,ス クラムジェットエンジンだけに限らず,超音速エジェクタや化学酸素沃素レーザ(Chemical Oxygen-Iodine Laser: COIL)の技術にも直結する課題であり,超音速乱流制御の基礎的な問 題としても興味深い.そのような背景のもと,超音速混合促進に関しては様々な研究がな されているが,この技術はまだ開発の途上にあり,飛躍的な進展が期待されている.
1.2 超音速縦渦
前述のように,超音速域では撹乱の移流マッハ数の増加により撹乱の成長や乱流渦の生 成は圧縮性の影響により著しく低下してしまう.そのため,2次元超音速混合層に見られ るBrown-Roshko 渦5)のような横渦構造(流れに垂直な回転軸を持つ渦)による混合促進は 非常に困難となる.そこで,圧縮性が緩和される縦渦(流れ方向に回転軸を持つ渦)の利 用が有望視されており,この手法により超音速燃焼が達成されることが燃焼試験で確認さ れている 6-9).超音速混合における縦渦の役割は以下の2つに大別できる.まず,大規模な 縦渦を超音速流中に導入し,その中に燃料を噴射することで,縦渦の強い連行作用 (Entrainment)により,2次元超音速混合層に比べて,主流空気と燃料を縦渦内に多く取り 込むことができる.そして,その縦渦がカスケード過程で小スケールの渦へと次々に崩壊 して燃料と空気との接触面積を飛躍的に増加させることで燃焼が促進されるはずである. これまで,超音速混合促進を目的に,様々な燃料噴射装置が提案されている 6-29).AW (Alternative Wedge)ストラットに代表される主流設置タイプの燃料噴射装置6, 10-12)(図 1.1) や,これを壁面に設置したような形のHyper mixer 型の燃料噴射装置7-9, 13-19)(図 1.2)はラ ンプ境界に生じる剪断流を利用して縦渦を導入する形態である.これらのランプ噴射器で は,ランプ形状により導入する縦渦の大きさや回転方向などを自由に調整でき,ランプか ら発生する衝撃波などの撹乱を混合領域に導入することで組織構造の崩壊を早めて混合を 促進することも可能である20).須波ら6, 10, 11)はAW ストラットの形状を種々変化させ,順 回転・逆回転の縦渦列による混合状態の比較や,大小の縦渦による干渉,複葉 AW ストラ ットによる混合促進などについて調べた.Sislian ら 13-17)は数値計算によりランプ形状を Sweep 形状(図 1.3)や Cantilever 形状(図 1.4)などに変化させるとともに,ランプ角度に ついても変化させ,それぞれについて混合効率を比較している.また,噴流の噴射形状に 工夫を加えることでランプ噴射器と同様の役割をさせようとする Aero dynamic ramp21, 22) (図 1.5)と呼ばれる噴射形状も提案されている.他に斜め噴射タイプの燃料噴射装置23-25) は壁面から主流に対して斜めに燃料噴射することで主流の圧力損失を最小限に留めようと する形態で,噴流プルームの成長方向に沿って縦渦が誘起され,噴流の貫通高さを増加さ せることができる.斜め噴射タイプの派生型として,噴射孔の形状を楔型26)や楕円形 27)と したものや,噴流そのものにあらかじめ旋回を与えておき(Swirling jet28, 29)),混合促進を 狙ったものもある. 縦渦による混合を有効に利用するには縦渦の挙動を理解する必要があるが,超音速混合 場を詳細に調べた例は意外に少なく,特に縦渦の崩壊過程に関して注目した研究はほとん どない.本研究では,Hyper mixer 型の燃料噴射装置を対象に研究を行い,縦渦の生成から 崩壊にいたる過程を詳細に調べるとともに,混合領域の拡大や縦渦の崩壊を支配するパラメータを特定した.
1.3 混合評価手法
迅速な混合を実現するため,様々な燃料噴射形態が提案されてきたが,その性能改善には 混合状態を知る必要がある.しかし,現在の空気と燃料の混合評価手法は時間平均的な評 価が主である.いうまでもなく,燃焼は空気と燃料とが直接触れあわなければ生じない現 象である.そのため,時間平均的な評価よりも時系列の,それも瞬間的な混合状態を定量 的に評価できる混合評価手法が望ましい.加えて,流速の大きい超音速流中では,例えば 流速500 m/s で移流する 1 mm の流体構造は周波数にして 500 kHz に相当するため,超音速 流での変動計測には少なくとも数百kHz の時間分解能が必要となる. LIF(Laser-Induced Fluorescence : レーザ誘起蛍光法)はレーザを用いた非接触型評価法の代 表例である 25).特に流れ場にレーザシートを入射し平面での計測を可能にしたものがPLIF(Planer Laser-Induced Fluorescence : 平面レーザ誘起蛍光法)である.LIF や PLIF は,基 底状態にある分子にそれを励起する波長のレーザを照射することで分子を励起し,基底状 態に遷移する際に発する蛍光を記録する方法である.そのため,燃焼による生成物に対し てもこの計測方法は有効であり,燃焼状態の特性を計測することも可能となる.非反応系 混 合 場 の 計 測 に は , ヨ ー ド を ト レ ー サ に 用 い た PLIIF(Planer Laser-Induced Iodine Fluorescence : 平面レーザヨード誘起蛍光法)を用いた例30)がある. PLIF と同様に,レーザを用いた非接触型断面一括計測が可能な手法として Rayleigh/Mie Scattering(レイリー/ミー散乱)がある24, 27-29).この手法は微小なトレーサ粒子を流れに付随 させ,レーザを照射する.このときトレーサ粒子の径がレーザの波長に比べてはるかに小さ ければレイリー散乱,無視できなければミー散乱による散乱光が得られる.この散乱光を カメラで記録することで流れ場の様相を判断する手法である.
LIF や Rayleigh/Mie Scattering のようにレーザを用いる計測では,混合状態の時系列計測が 不可能である場合が多く,乱流混合特性の評価は行えない.さらに複雑かつ高価な実験機 器が必要となる. 混合状態の時系列計測を試みた例として,改良型直接サンプリング法 31)と水素―白金触 媒反応を利用した混合評価手法32,33)がある.改良型直接サンプリング法は,熱線流速計, 温度センサ,感圧素子を内部に持つ吸引プローブを気流中に設置し,直接サンプリングを 行うことで気流の濃度・質量流束の時系列計測を可能にしたものである.この手法では, 温度センサの制限から2.5kHz までの計測が可能となる.しかし,超音速流で乱流混合特性 評価を行う場合にはさらにサンプリング周波数を高める必要がある.
ある.この計測手法は,水素と白金が触媒反応を起こすことを利用した計測法で,白金線 プローブ(触媒反応プローブ)とニッケル線プローブ(参照プローブ)を持つ2線式平行 熱線プローブにより空気―水素混合場の計測を行う.触媒反応プローブは水素濃度に応じ て触媒反応熱を生じるため,水素濃度に応じて参照プローブよりも供給電力量が小さくな る.そのため,混合が十分に進んでおらず,濃度変動がある時には 2 つの熱線への供給電 力量の相関は低くなる.逆に十分に混合が進み濃度が均一である場合には相関は高くなる. このように各熱線の供給電力から定性的な混合状態を知ることができる.しかし,水素を 使用するため危険であり,また専用の水素処理設備が必要となるため導入が難しい. 本研究では熱伝達特性の異なる2本の熱線を持つ2線式平行熱線流速計を用いて,最大 500 kHz の濃度・質量流束変動を時系列同時定量計測できる手法を提案した.そして,この 手法を用いて超音速縦渦の導入された流れ場の計測を行い,縦渦による燃料混合過程を調 べた.
1.4 本研究の構成
本研究ではスクラムジェットエンジンの技術課題である超音速混合促進に関して,超音 速縦渦の生成から崩壊に至るまでの過程や縦渦による燃料・空気混合過程を詳細に調べる とともに,混合領域の拡大や縦渦の崩壊を支配するパラメータを特定した.各章の概要は 以下の通りである. 第2章では,超音速風洞や縦渦導入デバイス等の実験設備,およびシュリーレン光学系 やPIV 計測装置,熱線流速計等の実験装置について述べる. 第3章では,2線式熱線流速計による濃度・質量流束計測の原理を説明し,本手法の妥 当性を示す.計測対象には2次元超音速混合層を用い,Mie 散乱による平均濃度分布との比 較や濃度・質量流束変動波形をもとに計測結果を検証し,本手法により混合過程の計測が 可能であることを示す.また,見込まれる計測誤差の見積もりや,計測精度向上のための 指針も示す. 第4章では,主流マッハ数2.4 の超音速流中に導入された縦渦を対象に,シュリーレン法, ステレオ PIV 計測,2線式平行熱線流速計による混合評価を行い,流れ場を詳細に調べた 結果を述べる.シュリーレン法とステレオ PIV 計測により,縦渦を取り巻くように渦輪状 の横渦構造が形成されていることを確認するなど,基本的な流れ場を明らかにした.さら に混合評価手法により燃料が縦渦や渦輪状構造により拡散していく様子を捉え,また縦渦 は渦輪状構造との干渉により崩壊することを示唆した. 第5章では,主流マッハ数,縦渦導入デバイスランプ角,縦渦導入デバイスに流入する 境界層,燃料噴射の条件をパラメータとして,シュリーレン法およびステレオ PIV により超音速縦渦による混合場を計測した.その結果,混合領域の拡大や縦渦の崩壊を支配する パラメータを特定するとともに,各パラメータが流れ場に及ぼす影響を明らかにした.
図 1.1 AW ストラット6, 10-12)
図 1.2 Hyper mixer7-9,13-19)
図 1.4 Cantilever 形状13-17)
第 2 章 実験装置
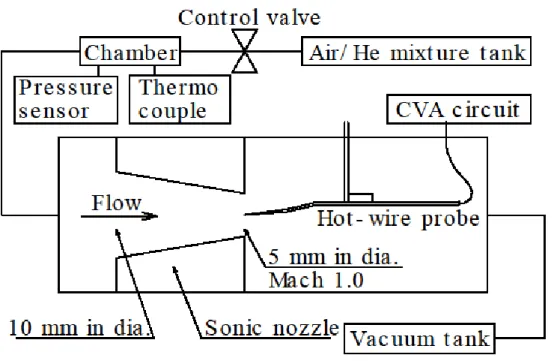
2.1 超音速吸い込み式小型風洞
本研究は図 2.1 に示す大気吸い込み式の超音速風洞を使用した.通風は手動の開閉バルブ によって行い,バルブを開くとフィルター付の空気取り入れ口から空気が流入し,ラバー ルノズルを通過し超音速に加速され,測定部を通過する.その後,ディフューザを通って2 基の真空タンクへと導かれる.ラバールノズルスロート部は下壁が水平面で,上壁が特性 曲線法によって設計された二次元曲面である.測定部断面は高さ18 mm,スパン 30 mm の 矩形断面であり,測定部の長さは400 mm である.測定部側面はガラス製で,シュリーレン 法による可視化や PIV 計測が可能である.また,風洞上部からピトー管や熱線流速計プロ ーブを取り付けるためのサポートを導入することができる.測定部主流マッハ数は上壁ブ ロックを取り替えることでマッハ数を1.85,2.4 と変化させることができ,このときの単位 長さ当りのレイノルズ数はそれぞれ1.35×107 m-1,1.05×107 m-1である.また,ノズル出口 では厚さ約1 mm の層流境界層が形成される.2.2 縦渦導入デバイス
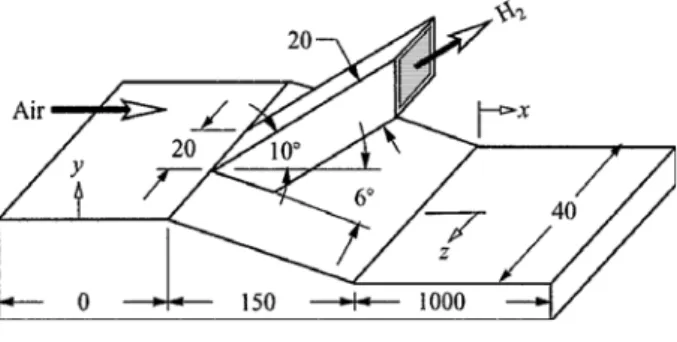
本研究で使用した縦渦導入デバイスは,図 2.2 に示すように壁面に設置した圧縮ランプ(図 2.2(a))もしくはバックステップ(図 2.2(b))と膨張ランプによって生じる剪断流により縦 渦を発生させる.このタイプの縦渦導入デバイスはHyper mixer という名で研究されており 7-9, 13-19),超音速混合に有効であることが確認されている.本研究で使用した縦渦デバイス は流路下壁スパン中央に互いに逆方向に回転する一対の縦渦対を形成する.この縦渦導入 デバイスでは,圧縮ランプ(もしくはバックステップ)と膨張ランプの高低差が導入され る縦渦の径を決め,膨張ランプにより生み出される下りの速度がおおよその縦渦の強さ(循 環)を決める.そのため,本研究では直径5 mm 程度の縦渦が導入される. 燃料噴射の影響を調べるため,噴射なし,空気噴射,ヘリウム噴射の3種類について実験 した.なお,一般的にスクラムジェットでは燃料に水素が用いられるが,安全性の問題か ら最も原子番号が近く,安全なヘリウムガスを擬似燃料として使用した.さらに気体種に よる影響を調べるために空気噴射も行った.噴射は圧縮ランプもしくはバックステップ背面中央部に設けた直径2 mm の円孔から音速噴射され,噴射の角度は圧縮ランプの場合には ランプ角と同じ角度で噴射され,バックステップの場合には水平に噴射される.噴流の主 流に対する運動量流束比J = juj2/∞u∞2は主流マッハ数1.85 の場合は 1.4,主流マッハ数 2.4 の場合は2.0 と設定し,空気・ヘリウム噴流とも運動量流束比は同じ値となるよう調節して いる.ここでは密度,u は流速で,添え字 j は噴流,∞は主流を表す.仮に同じ運動量流束 比で水素を噴射した場合,当量比は主流マッハ数1.85 の場合は 0.11,主流マッハ数 2.4 の 場合は0.17 となる.
2.3 シュリーレン光学系
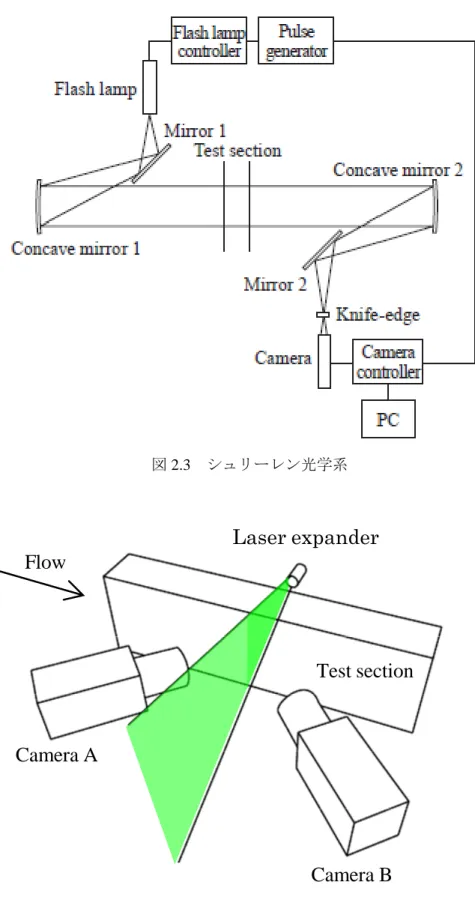
シュリーレン法は流体の密度勾配による光の屈折現象を利用し,ある方向の空間的密度 勾配を光の明暗として可視化する手法である.焦点において光を遮るナイフエッジの向き を変えることにより任意方向の空間的密度勾配を見ることができる.シュリーレン光学系 を図 2.3 に示す.光源から出た光は,集光レンズ,スリットを通過し,広がりながら平面鏡 1 に入射する.平面鏡 1 で反射した光はさらに広がりながら凹面鏡 1 に入射する.凹面鏡 1 で反射した光は平行光線となり風洞測定部を通過し凹面鏡 2 に入射する.凹面鏡 2 で反射 した光は収束しながら平面鏡2 に入射する.平面鏡 2 で反射した光はさらに収束を続けナ イフエッジが置かれた焦点の位置で一点に収束し,また広がりながらハイスピードカメラ に入射して像となる.光源には発光時間180 ns のフラッシュランプを用いた.主流流速 550 m/s(M = 2.4)で移動する流体粒子がこの発光時間内に移動する距離は 0.1mm 程度であり, 得られる画像は,ほぼ瞬間画とみなすことができる.ナイフエッジは流れ方向および鉛直 方向の密度勾配を捉えるためにそれぞれ鉛直および水平に設定した.画像の収録にはプロ グレッシブモードの録画が可能な CCD カメラを用い,1回の通風で 400 枚の画像を得た. 撮影は60 fps で行い,カメラのシャッター速度は,外光ノイズを減らし,鮮明な像を得るために1/1000 sec とした.得られたシュリーレン画像は最大 1024 pixel×1024 pixel の BMP 画 像としてPC に保存され,各画素の輝度は 0 から 255 の 256 階調(8 bit)で表される.画像の 空間分解能は約0.1 mm/pixel で,面積素 0.1 mm×0.1 mm を1画素が受け持つ.
2.4 PIV 計測装置
PIV 計測の原理は非常に単純である.計測対象の流れ場の時間スケールに比べ,十分に微
の粒子の移動量x を画像処理により求める.速度はx/t であるから,粒子の移動量およ
び撮影時間間隔より撮影断面上の速度ベクトル場が得られる.また,カメラ1台では計測 断面に平行な成分の速度しか算出できないが,2台のカメラで撮影することで速度3成分
を計測することができる.詳しい原理は文献34 に譲り,本節では本研究で使用した PIV 計
測装置について述べる.
PIV 計測には,Dantec 社製 Flow Map2005 を用いた.光源となるレーザは出力 120 mJ/pulse, 発振パルス幅10 ns,レーザ繰り返し周波数 4 Hz のダブルキャビティーNd:YAG レーザの第
2高調波(波長532 nm)を使用した.レーザの発振間隔はディレイジェネレータにより制
御し,0.45 s に設定した.撮影される粒子画像はプログレッシブモードの録画が可能な CCD カメラを用いて1280×1024 pixel の BMP 画像として PC に保存され,各画素の輝度は0か ら4095 の 4096 階調(12 bit)で表される.粒子画像は Dantec 社製 Flow Manager により解析さ れ,速度ベクトルデータとなる.本研究では図 2.3 に示すように計測断面をステレオ視した 2台のカメラにより速度3成分を計測した.カメラはレーザシートを挟むように設置し, Mie 散乱において散乱光強度の高い前方散乱光を取得できるようにした.速度ベクトルは 32×32 pixel の検査空間(Interrogation Area : IA)に対する FFT 相互相関法と 1/64 pixel のサ
ブピクセル補完による解析で得られる.速度算出の格子点間隔は高さ方向に0.46 mm,スパ ン方向に0.67 mm であり,速度分解能は各方向に 1 m/s 程度である.トレーサ粒子には平均 粒子径0.7 m のステアリン酸粒子を使用した.この粒子が 106 m/s2の加速度(直径5 mm, 旋回速度50 m/s の渦運動に相当)を受ける場合,その追随誤差は約 2%であることを確認し ている35).
2.5 熱線流速計
熱線流速計は気流中に通電加熱された細い金属線を導入することで,気流により奪われ る熱量と金属線が発するジュール熱が釣り合うように回路でそのジュール熱を制御するこ とで,回路の出力から気流の質量流束を計測する手法である.熱線流速計はその応答周波 数の高さから気流の変動計測に広く用いられている.熱線流速計の原理については3.1 節で 詳しく述べる. 本研究で使用した熱線プローブは1線式熱線プローブ(熱線1本)と,図 2.5 に示す2線 式平行熱線プローブである.1線式熱線プローブでは,長さl = 0.8 mm,直径 d = 5 m のタ ングステン線を使用した.2線式平行熱線プローブでは,長さl = 0.5 mm,直径 d = 5 m お よび3.1 m のタングステン線を用いており,2つの熱線の間隔 doffは0.16 mm である.l/d < 100 になればプロングへの熱伝達の割合が増して流速感度が落ちることが西岡 36)によって 示されているが,使用した各熱線ではl/d > 100 を満たしている.また,2 線式平行プローブのdoffは咲間32)の使用したプローブのdoff =1.4 mm に比べ 1/10 程度に縮小することに成功し た. 使用した回路はSarma37-39)によって提案された定電圧型回路で,一般的に使用される定温 度型に比べ取り扱いは難しいが,応答周波数が高いため超音速流の変動計測に適している. 一般的な熱線流速計では応答周波数は最大 100 kHz 程度であるが,本研究では応答周波数 300 kHz および 500 kHz の定電圧型熱線流速計回路を使用した.このような高周波数帯まで 計測可能な熱線流速計回路は世界的にも類を見ない.本研究では 2 本の熱線の加熱度が同 程度となるように入力電圧を直径5 m タングステン線は通風中計測時は 4 V, 5 V, 6 V,ホ ワイトノイズ計測時は3.5V,直径 3.1 m タングステン線は通風中計測時は 4.5 V, 5.5 V, 6.5 V,ホワイトノイズ計測時は 4.0 V とした.時系列の熱線出力は AD コンバータ(エルメッ ク社製 EC-6805-4CH)により,サンプリング周波数 10 MHz で 0.2622 s の間,PC に記録し た.
2.6 較正用風洞(ソニックノズル)
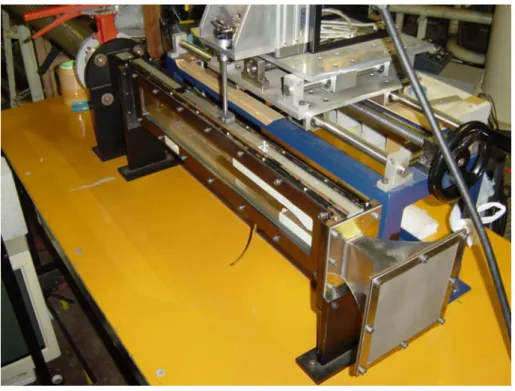
本研究で提案する混合評価手法では熱線流速計を既知の濃度,質量流束に対して較正しな ければならない.較正は通常,計測対象となる流れの状態(マッハ数や気流温度)と近い 流れ場で行うが,超音速風洞での較正では,流量が大きく,ピトー管計測(質量流束の計 測)と熱線計測を別々に行う必要がある.そのため莫大な量のヘリウムガスが消費されて しまい,現実的ではない.また,質量流束に関してだけでなく,数種類の濃度についても 較正を行うため,作業が極めて複雑になる.そのため較正用流体の消費量を抑えることが でき,作業の簡易な較正方法が必要となる.これらの条件を満たす較正方法として,図 2.5 に示すように小断面先細円孔ノズル(ソニックノズル)を小型吸い込み式風洞内部に取り 付け,風洞空気取り入れ口前面に較正気体を一時的に淀ませるチャンバを設置する方法を 考案した.このような較正手法は著者の知る限り存在せず,世界初の試みである.空気と ヘリウムの混合気である較正用流体は断面が180 mm×180 mm,長さ 180 mm のチャンバに 導かれ,チャンバ内のピトー管,熱伝対により総圧,総温を計測し,その後,出口直径5 mm の先細円孔ノズルに導かれ,出口で音速となり,真空タンクへと導かれる.チャンバの断 面積は,円孔ノズルの出口断面積の1650 倍であり,チャンバ内での流速はノズル出口のそ れに対して十分小さい. ソニックノズルの背圧は真空タンク内の圧力(2 kPa 程度)に相当するため,チャンバ内 の総圧を調圧バルブで調節すればノズル出口を音速にすることができる.ノズル出口で流 れがチョークし,流速が音速で固定されれば,チャンバ内で計測された総温・総圧より質ことができるので,幅広い質量流束について容易に較正が可能である.さらに,ノズル出 口は直径5 mm と小さいため流量も超音速小型風洞での較正に比べて 1/40 以下に削減でき る. 壁面摩擦等による圧力損失や接合部からのリークなどの影響を調べるため,チャンバ内静 圧と総圧,ソニックノズル出口の総圧を3つの異なる作動条件で計測した結果を表 3.1 に示 す.これらは良い一致を示し,壁面摩擦などによる圧力損失は無視できる程度であること がわかる.そのためチャンバ内での計測値により推定されるノズル出口での諸量は正しい といえる. 表3.1 較正用風洞各部での圧力計測結果 チャンバ静圧 チャンバ総圧 ノズル出口総圧 CASE1 14.89 14.88 14.86 CASE2 26.09 26.09 26.01 CASE3 36.12 35.93 35.54
[kPa]
チャンバ静圧 チャンバ総圧 ノズル出口総圧 CASE1 14.89 14.88 14.86 CASE2 26.09 26.09 26.01 CASE3 36.12 35.93 35.54[kPa]
図 2.1 超音速吸い込み式小型風洞 12.5 mm 5 mm 12.5 mm 18 m m z y o Flow x-direction: 5 mm Streamwise vortex 12.5 mm 5 mm 12.5 mm 18 mm y o Flow x-direction: 2.5 mm (a) Flow z Injection Flow Streamwise vortex Injection (b) 図 2.2 縦渦導入デバイスの俯瞰図および断面図, (a): 圧縮ランプタイプ, (b): バックステッ プタイプ
図 2.3 シュリーレン光学系
Flow
Laser expander
Camera A
Camera B
Test section
図 2.4 3D-PIV 計測系Tip side view
Tip top view
Side view
図 2.5 二線式平行熱線流速計プローブ,熱線の長さ l = 0.5 mm,各熱線の間隔 doffは 0.16 mm
第 3 章 混合評価手法
燃料噴射装置の改善には混合場の評価手法が必須であるが,これまでの定量評価手法は時 間分解能が十分でなく,瞬間的な混合状態の評価手法は確立されていない.そこで本研究 では,特性の異なる2本の熱線流速計を用いて異種流体による超音速混合場において最大 500 kHz の濃度・質量流束変動を時系列同時定量計測する手法を提案した.3.1 節では,熱 線流速計の計測原理について,3.2 節では2線式平行熱線流速計による混合評価手法につい て述べる.3.3 節では濃度・質量流束による較正を行うとともに計測時に見込まれる誤差や 計測精度向上のための方法について議論する.3.4 節では2次元超音速混合層の計測を通し て本計測手法の妥当性を検証する.3.1 熱線流速計の原理
3.1.1 熱線流速計
36, 40-50) 熱線流速計は流れの変動を計測するための計測器として広く用いられており,その作動原 理は以下のとおりである.計測には流れの中に通電加熱された細い金属線を挿入する必要 があり,これを熱線と呼ぶ.流れの中に置かれた熱線の温度は主に流れによる熱損失Q と ジュール熱W が釣り合うように保たれ,式(3.1)のように書ける. Q W (3.1) 流れによる熱損失は主に熱伝達によるもので,プロングとの熱伝導が無視できるとすれば, 式(3.1)は次式で表せる.
T T
h ld R IW W W a 2 (3.2) ここで,IWは熱線に流れる電流,RWは加熱時の熱線抵抗,l は熱線の長さ,d は熱線の直径, h は熱伝達率,Twは加熱時の熱線の温度,Taは気流温度である.式(3.2)をヌセルト数 Nu = hd/k を用いて表すと,
T T
Nu lk R IW W W a 2 (3.3) となる.ここで,k は熱伝導率である.一般に Nu は以下のように書ける. Nu = Nu(Re, Pr, M, Gr, Kn, τ = (Tw-Ta)/Ta, l/d) (3.4) ここでは温度上昇度を表し,=(Tw-Ta)/Taで定義される.本研究で扱う超音速流では,自 然対流は無視できるのでグラスホフ数Gr は関与せず,流体は連続体と見なせるのでクヌッセン数Kn も関与しない.さらに,l/d が十分大きく,熱線受感部は十分に小さく流れが二次 元的ならばl/d は効かない36).Laufer と McClellan51)によれば,Re > 20,1.3 < M < 4.5 では Nu は, Nu = A(τ)+B(τ)Ren(n は 0.5 前後) (3.5) で表せる.ここで,A(), B()は熱線に固有の温度上昇度の関数である.式(3.3)に式(3.5)を 代入すると,
n
a W W WR lkT T A B Re I2 () () (3.6) となる.熱線の抵抗Rwと熱線の温度Twの関係は一般的に非線形だが,通常の温度範囲(0℃ ~300℃)では線形と見なすことができ,次式で表せる.
W f
f W R T T R 1 (3.7) ここで,は体積抵抗率の温度係数,Tfは参照温度で,Rfは参照温度における熱線抵抗であ る.式(3.7)より Tw-Taは,
w a
f f a f w a w R R R T T T T T T 1 (3.8) で表される.式(3.6)に式(3.8)を代入すると,
n
a W f W W R R R A B Re lk R I2 (
) (
)
(3.9)となる.ここで,PDR = Iw2Rw/(Rw-Ra)で表される熱消散率(Power Dissipation Ratio)を定義する
と,式(3.9)は,次式で表せる.
n
f Re B A R lk PDR () () (3.10) これを簡略化して書くと,
0.5 u B A PDR
(3.11) ここで, ) (
A R lk A f (3.12) ) ( 5 . 0
B d R lk B f (3.13) である.ここで,は粘性係数である.式(3.11)から,流れの状態(質量流束,温度)が変化す れば,それに応じて平衡温度も変化する.そのため電気抵抗の温度依存性の大きな金属を 熱線として用いて抵抗変化を検出すれば流れの状態を知ることができる.この熱線を組み 込んだ電気回路を熱線流速計といい,その加熱方式の違いから,熱線に流れる電流を一定 に保つ定電流型,熱線抵抗を一定に保つ定抵抗型(または定温度型),と本研究で使用し償が容易なため広く使用されているが,OP アンプの性能向上により実現した定電圧型は定 温度型よりも応答帯域が広く,超音速流の変動計測に適している.
3.1.2 熱線の動特性
亜音速領域では密度の変化は無視できるので,質量流束は流速と置き換えて考えても差 し支えない.簡単のために本節では流速のみを考える. 熱線は主に流れの変動を計測するために用いられ,非定常流中では熱損失は時間的に変化 し,熱線温度も変動する.そこで注意しなければならないのは熱線には熱容量があり,温 度変化には有限の時間がかかるということである.したがって熱線の熱容量を Cw,熱線の 温度をTwとすると,非定常流での熱平衡式は式(3.14)のようになる. dt dT C Q W w w (3.14) 流速,電流,熱線抵抗,熱線の非加熱抵抗が時間平均値(U, Iw, Rw, Ra)まわりに(u(t), iw(t), rw(t), ra(t))の微小変化をする場合,式(3.14)は式(3.11)を用いて次式で表される.
w w
f w a a w w w w w w R r dt d R C u U F r R r R r R i I
2 (3.15) ここで F(U)=A’+B’(U)nである.式(3.11)を偏微分することにより次式が導かれる.ここで, 二次以上の微少量は無視できるものとしたが,変動が大きい場合には注意が必要であり, その場合の処理方法は3.5 節に示す. w w w w w I R a I R 2 (3.16)
1 2 n w a w w w nBU I R R a U R (3.17) a w a w R R R R (3.18) ここでawは加熱度で,aw=(Rw-Ra)/Raで定義される.式(3.16) ~ (3.18)を用いれば,式(3.15)は 次式で表される. a a w w w w w w w r R R u U R i I R dt dr M r (3.19) ここで,M は熱線の時定数であり, 2 w w f w I a R C M (3.20) で表される.以上から流れの変動に対する熱線の応答は熱慣性の影響により一次遅れを持つことが分かる.つまり,高周波の変動に対して応答が鈍ってしまう.さらに熱線時定数 は熱線自体の特性である Cwだけでなく,aw/Iw2に比例していることから,流れの状態や熱
線の作動状態にも依存することが分かる.
3.1.3 定電圧型熱線流速計
37-39)定電圧型熱線流速計は’’Constant Voltage Anemometer’’の頭文字をとり CVA と呼ばれる. この最も基本的な回路はBasic CVA(B-CVA)回路と呼ばれ39),図 3.1 に示すとおりである. ここで R1,RF,R2は固定抵抗,Vinは入力電圧,Voutは出力電圧であり,既知の値である. 回路計算により,熱線にかかる電圧,熱線に流れる電流,熱線の加熱抵抗は次式で表され る. in f w R V R V 1 (3.21)
f in out
w R R V RV R R i 2 1 2 1 1 (3.22)
f
in out in f w V R V R R V R R R 1 2 2 (3.23) このように熱線にかかる電圧Vwが一定となるため定電圧型と呼ばれる.また,熱線の非加 熱抵抗Raは式(3.11)を変形した式 a w w R R u B A I2 1 1
(3.24) を用いて各計測点で求めることができる.具体的には,同一の計測点で入力電圧を 3 種類 変化させて計測する.このとき,質量流束や気流温度は変化しないため,図 3.2 に示すよう に,縦軸にIw2,横軸に1/Rwをとり最小二乗法を用いて直線を書けば,その切片は1/Raとな る.図 3.2 より,計測結果は直線によく一致しており,この方法で各計測点で Raを推定し ている. 熱線電圧が一定に保たれる定電圧型回路では,熱線に流れる電流の平均値をIw, 熱線抵抗 の平均値をRwとするとその各々の変動値との間には式(3.25)が成り立つ. 0 w w w wR r I i (3.25) ここで,二次の微少量(rw iw)は無視できるものとしているため,変動が大きい場合には注 意が必要で,その場合の処理方法は 3.5 節に示す.この条件を式(3.19)に代入し,気流温度 変動raが無視できるとすれば,次式の伝達関数が得られる. u b dr M r w w (3.26)ここで, U R a b w w 1 2 1 (3.27) w w w f w w a a I R C a M M 2 1 1 1 2 2
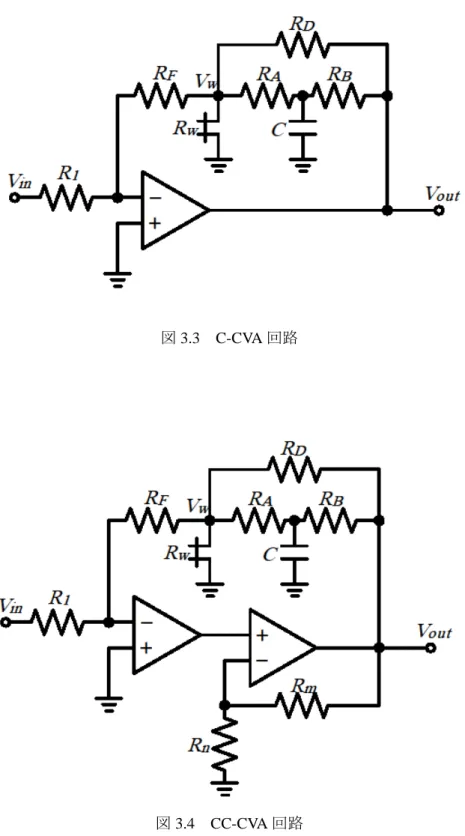
(3.28) である.したがって,CVA では加熱度を大きくすると見かけ上の熱線時定数 M’が小さくな り,その分熱線の応答帯域が広くなる.しかし,B-CVA 回路では,応答帯域は 1 kHz 程度 までと広帯域化が難しい.そこで,図 3.3 に示すように R2の位置に微分回路を組み込むこ とで,熱線の応答遅れを補償することができる38, 39).この回路をCompensated CVA(C-CVA) 回路という.しかし,超音速流のように数百kHz の応答帯域を得るためには,OP アンプに 100 倍以上の増幅度が要求され,C-CVA 回路の応答帯域は OP アンプの性能により 150 kHz 程度に制限される.そこで,本研究では図 3.4 に示すように C-CVA 回路の OP アンプを2 段にすることで増幅度を補ったComposite Compensated CVA(CC-CVA)回路39)を使用し, 300~500kHz の応答周波数を実現した.3.1.4 熱線の応答遅れの補償
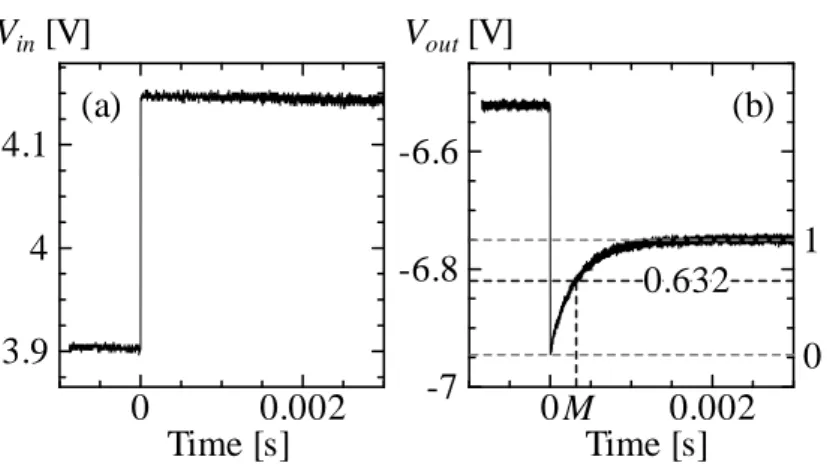
前述のように,熱線は熱慣性により流れの変動に対して1次遅れの応答特性を持つ.特 に本研究で提案している混合評価手法では2つの熱線回路出力の時系列データから濃度・ 質量流束を算出するため,各熱線の応答遅れを適正に補償しなければ振幅・位相がずれて 正しい出力が得られず,誤差の原因となる. 式(3.28)のように熱線の時定数は熱線の作動状態によって変化するため,図 3.4 の熱線回 路によるハードウェア的な補償は,気流温度と質量流束が大きく変化する超音速流の場合, 現実的ではない.そこで本研究では以下のように熱線出力をソフトウェア的に補償する. 式(3.28)では,awやIwは各計測点での計測結果より得られる値であり,Cw/Rfは熱線に固有 の定数である.そのため,各計測点での時定数を得るには定数 Cw/Rfをあらかじめ推定し ておかなければならない. 熱線の遅れを補償する微分回路を持たないB-CVA 回路の入力端にステップ入力を与えた とき,遅れが補償されていない熱線出力電圧vrawと理想的に補償されて流れの変動に対する 遅れが存在しない出力電圧videalの関係は周波数空間で時定数M’を用いて次式で表される. ideal raw V s s M V 1 1 1 (3.29) これを逆ラプラス変換すると, M t ideal raw v e v 1 (3.30) が得られる.ここで,t = M’の場合,式(3.30)は,
ideal
idela raw t M v e v v 1 1 0.632 (3.31) となる.すなわち,式(3.31)は vrawがvidealの63.2%となる時間 t が熱線の時定数 M’であるこ とを表している.図 3.5 は図 3.1 の B-CVA 回路の入力端に加えたステップ入力に対する熱 線回路の一次遅れ応答を計測した例で,図中の(a)はステップ入力波形,(b)はその出力波形 である.時定数 M’は出力電圧 Voutが最終値の 0.632 倍となる時間として直接求められる. 本研究ではこのようなステップ入力24 回の平均として時定数 M’を求め,式(3.28)より係数 Cw/Rrefを決定した.なお,OP アンプの周波数応答は熱線の熱慣性と比べて十分大きいの で,図 3.5(b)の一次遅れ応答は熱慣性によるものとみなせる. 次に熱線出力のソフトウェアによる補償方法について説明する.videalとvrawの関係は, dt dv M v v raw raw ideal (3.32) で表される.式(3.32)をラプラス変換により周波数領域に変換すると,
raw ideal MsV V 1 (3.33) となる.CC-CVA 回路に組み込まれている微分回路の補償定数を Tcとすると,回路によっ て補償された出力電圧voutは
c
raw out TsV V 1 (3.34) で表される.したがって式(3.33), (3.34)より out c ideal Ts V s M V 1 1 (3.35) となり,CC-CVA 回路の出力電圧 Vout(t)に周波数領域で伝達関数(1+M’s)/(1+Tcs)を積算する ことで,流れの条件によって変化する熱線の一次遅れを補償した出力電圧が得られる.3.2 2線式熱線流速計による混合評価手法
3.2.1 濃度・質量流束計測原理
本研究では,図 3.6 に示す熱伝達特性の異なる2本の熱線を持つ2線式平行熱線流速計プ ローブを用いた混合評価手法を提案した.その計測原理は亜音速流に適用されたHarion ら 52)の手法と同様で,それぞれの熱線の濃度・質量流束変化に対する熱伝達量の違いを利用す ることで,最大500 kHz の濃度・質量流束変動を時系列同時定量計測できる.超音速流におこの混合評価法では,2 種類の気体の混合流れを考える.流れの温度は定常であり各熱線 の熱平衡式はそれぞれ式(3.11)に従うものとすると,式中の定数 A’, B’は 2 種類の気体の混 合比(モル分率)に依存する関数となる.それゆえ,2線式平行熱線プローブを混合気流中に おいたとき,各熱線の熱平衡式は以下のように表される.
( 1,2) A c B c u i PDRi i i
(3.36) u は質量流束,c は計測対象気体の濃度であり,ここでは擬似燃料として用いたヘリウム濃度を表す.PDR は熱線のエネルギー消散率(Power Dissipation Ratio)である.添字 i はそれ
ぞれの熱線を表し,Ai(c), Bi(c)は各熱線固有の濃度の関数で,あらかじめ濃度・質量流束が 既知の流れ場で較正し,決定する必要がある.較正結果は3.3 節で詳しく述べる. さて,式(3.36)から質量流束を消去すると濃度のみの関数で表される次式が得られる.
B
c A c c B c A PDR c B c B PDR 2 2 1 1 2 2 1 1 (3.37) 式(3.37)に各熱線の出力から得られる PDRiを代入することで濃度が得られ,さらに得られた 濃度を式(3.36)に代入することで,質量流束が得られる.このように2つの熱線出力から濃 度と質量流束を時系列で計測することができる.3.2.2 各熱線が捉える流れの同一性
式(3.36)からわかるように,本手法は2つの熱線が同じ流れ(u)を捉えることを前提とし ている.しかし,2線式平行熱線プローブの幾何学形状から全く同じ位置に2本の熱線を 設置するのは不可能である.同じ流れを捉えられなければ,2 つの熱線出力は違う流れの情 報を持っていることとなり,これを濃度,質量流束に変換しても実際の値とはかけ離れた 計測結果となってしまう. そのため,熱線と熱線の距離(以下,オフセット距離)を可能な限り狭める必要がある. また,熱線流速計は強制熱伝達による熱の享受を利用した計測方法であるため,熱線に対 して垂直な速度成分の影響が支配的となる.そのため,オフセット距離だけでなく熱線を それぞれに対して平行に張ることも重要となる.以上の点を踏まえて熱線プローブの改良 を行った(2.5 節参照). 各熱線が捉える流れの違いの程度を見るため,主に計測対象とする超音速縦渦が導入され た流れ場で計測を行い,2つの熱線出力の相関係数を算出した.完全に同一の流れを捉え ているのなら,相関係数は 1 となるはずである.時定数の違いによる誤差を抑えるために どちらの熱線も直径5 m,長さ 0.5 mm のタングステン線を使用した.流れ場は図 3.7 に示 すように,下壁近傍に直径約5 mm の縦渦対を 2 対導入した主流マッハ数 2.4 の流れ場を使 用した.図 3.8 にシュリーレン画像を示す.計測位置は x = 100 mm,z = 15 mm(スパン中央)で,y = 2 mm から 14 mm まで 1 mm 刻みに計測した.計測は下側の熱線を基準に位置 あわせを行っている. 図 3.9 に2つの熱線出力電圧 Voutの相関係数のy 分布を示す.図 3.9 には使用した回路の 応答周波数である300 kHz のローパスフィルタを施し,さらに S/N 比が 5dB 以下の周波数 成分を除去した場合の相関係数の変化も合わせて示している.Voutの変化は質量流束の変化 に相当するため,Voutの相関係数は各熱線が捉える流れの同一性を示すといえる.図 3.9 か ら相関係数は最大で0.9 と大きく,2つの熱線が捉える流れはほぼ同じであることが確認で きる.なお,2 mm ≤ y ≤ 5 mm および y = 14 mm(主流)で相関係数が小さくなっている.x = 100 mm では,下壁で反射した衝撃波が y = 5 mm 付近を通過しており,縦渦は衝撃波との干 渉により小スケールの渦へと崩壊すると考えられる.そのため,衝撃波通過後の2 mm ≤ y ≤ 5 mm では流れの構造のスケールが小さく,2つの熱線が捉える流れの同一性が下がったと 考えられる.また,縦渦はy ≤ 13 mm の領域に存在しており,主流中は変動の振幅が小さい ためノイズの影響が大きく, y = 14 mm では相関係数が低下したと考えられる.このよう に本手法では流れのスケールやノイズの影響を常に監視することが重要であるといえる. さらに,オフセット距離が小さいため,熱線間の干渉の有無を確認する目的で,2 線式熱 線流速計で計測した点と同一点で 1 線式熱線流速計での計測を行った.各熱線により得ら れたスペクトルを図 3.10 に示す.同時計測でないために細部では異なっているが,概形は 一致しており,2本の熱線は互いに干渉しないものと考えられる.
3.3 濃度・質量流束に関する熱線の較正
3.3.1 熱線の較正方法
本研究で提案する混合評価手法では,熱平衡を表す式(3.11)中の A’(c), B’(c)を濃度・質量 流束が既知の流れ場で精度よく較正しなければ,2つの熱線出力を濃度,質量流束に変換 する際に誤差が生じる.そのため精度の良い熱線の較正が必要となる. 較正は通常,計測対象となる流れの状態(マッハ数や気流温度)に近い流れ場で行うが, 計測に使用する超音速吸込み式風洞では流量が大きく,膨大な量の較正用流体(Helium-Air 混合気)が必要となり,現実的でない.また,同風洞での濃度・質量流束に対する較正を 考えたとき,後述するその較正方法から作業が極めて複雑になる.そのため較正用流体の 消費量を抑えることができ,作業の簡易な較正方法が必要となる.そこで,2.6 節で示した ソニックノズルによる較正方法を提案した.ければ,この較正結果は混合評価には用いることができない.そこで,較正流体として空 気(c = 0)を用いた場合の超音速風洞とソニックノズルによる較正結果を比較した. 超音速小型風洞における較正は,ピトー管により質量流束分布を計測し,続いて同じ位置 を熱線流速計で計測してPDR分布を算出し,最小二乗法により式(3.11)の係数A’(c = 0), B’(c= 0)を決定する.較正は幅広い質量流束分布を持ち,ピトー圧から質量流束が容易に計算可能 であるという理由から,流路下壁の十分に発達した乱流境界層を利用した.ピトー計測の 概略図を図3.11に示す.壁は断熱壁で,境界層内では静圧は高さ方向に一定(∂P/∂y = 0)で あるとする.また,図3.11に示すようにピトー管先端ではBow shockが発生するが,ピトー 管先端では局所的に垂直衝撃波とみなすことができるものとする.主流マッハ数M∞は次式 で得られる53).
1
/2 , 1 2 / 1 1 1 1 2 1 2 2 1 1 2 , 0 , M M M P Ppitot (3.38) ここで,P0,∞は主流の総圧,Ppitot,∞ は 主流におけるピトー圧, は比熱比である.本研究で は吸い込み式超音速風洞を用いているので,境界層がバックステップやトリッピングワイ ヤ等で強制的に乱流されたものでなく,自然な状態で乱流遷移したものであれば淀み状態 の圧力P0,∞は大気でのそれと等しいと考えられる.次に,主流マッハ数M∞と総圧P0,∞から静 圧Pは, . 2 1 1 2 1 , 0 M P P (3.39) で得られる.境界層内の静圧Pは高さ方向に一定であるため,境界層内のピトー圧分布から 次式よりマッハ数分布が得られる.
1 1 2 1 2 1 2 1 2 1 M M P Ppitot for M > 1, (3.40) 1 2 2 1 1 M P P pitot for M ≤ 1. (3.41) ここで,壁近傍では亜音速の領域があるため,マッハ数によって式(3.40)と式(3.41)を使い分 けている.これにより得られたマッハ数分布から,質量流束は 2 1 2 0 2 2 2 1 1 M RT P M u (3.42) で得られる.ここでRは気体定数,T0は総温である. 計測対象は主流マッハ数2.4の流路下壁に発達する乱流境界層とし,計測位置はスロート から262 mm下流の下壁流路スパン中央とした.流れ場の瞬間シュリーレン画像200枚から得た平均画像を図3.12に示す.ここでxはスロートからの距離,yは下壁からの高さである.図 3.12から4 mm程度の乱流境界層が形成されていることがわかる.ピトー計測により得た質 量流束分布を図3.13に示す. ソニックノズルによる較正では,総圧P0,総温T0はチャンバで計測され,較正を行うソニ ックノズル出口で流れはチョークしてマッハ数は1となるため,質量流束は次式で表される. 1 2 1 0 0 1 2 u RT (3.43) そのため,質量流束を算出するためのピトー管による計測と熱線による計測を別々に行う 必要が無く,熱線計測と同時に質量流束が計測できるため,較正が容易である. さて,較正流体として空気(c = 0)を用いた場合の超音速乱流境界層とソニックノズルで の較正結果を質量流束の平方根に対するPDRとして図3.14に示す.較正結果は質量流束の平 方根に対してどちらもほぼ線形であり,式(3.36)の表式が正しいことがわかる.さらに,2 つの較正結果は良い一致を示しており,ソニックノズルの較正結果が実際の計測に用いる 超音速小型風洞において適用可能であることがわかる.回帰分析結果による重相関はソニ ックノズルで0.999,超音速乱流境界層では0.993であり,ソニックノズルの方が精度の良い 計測ができているといえる.
3.3.2 較正結果
ヘリウム-空気混合気(ヘリウム濃度 c = 0, 0.2, 0.4, 0.6, 1.0)を用いてソニックノズルによ り2線式熱線流速計を較正した.2本の熱線には5 m および3.1 m タングステン線を 使用した.較正結果を式(3.36)の熱平衡式の形で整理したものを図 3.15 に示す.(a)は5 m タングステン線(添え字1 で表す)を,(b)は3.1 m タングステン線(添え字 2 で表す) の結果を質量流束の平方根に対するPDR で示している.どちらの熱線の較正結果も各濃度 別にほぼ直線となっており,式(3.36)における係数 Ai, Biが濃度によって変化することがわか る.図 3.15 から各濃度について最小二乗法により線形近似することで図 3.16 に示すように 各濃度の係数Ai, Biが求まる.図中の実線は係数を濃度の3 次関数として近似した結果を示 している.図 3.16 から,濃度に対する係数 Ai, Biの変化の傾向は2つの熱線で同様の傾向を 示し,近似式との一致も概ね良好であることがわかる.この 3 次近似式を用いることで, 式(3.36)と式(3.37)から濃度・質量流束が計測できる.図 3.17 に PDR1とPDR2の関係におけ る等濃度線および等質量流束線図を示す.図 3.17 より,PDR の小さい領域では,等濃度線 が密集していることがわかる.これは質量流束が小さいため熱伝達量が減少し,濃度別でが大きくなってしまうと予想される.
なお,ヘリウム濃度に応じて気体の物性値が変化するため,式(3.43)の比熱比および気体
定数R は濃度の関数となる.空気の分子量 Mair,気体定数 Rair,定圧比熱 Cpair,比熱比air
は,それぞれ
Mair = 28.97 [g/mol] (3.44)
Rair = 286.98 [J/(kgK)] (3.45)
Cpair = (28110+1.967T+4.802×10-3T 2-1.966×10-7T 3)/Mair [J/(kgK)] (3.46)
air = Cpair/(Cpair-Rair) [-] (3.47)
を使用し,ヘリウムの各物性値は, MHe = 4.0026 [g/mol] (3.48) RHe = 2077.15 [J/(kgK)] (3.49) CpHe = 5192.6 [J/(kgK)] (3.50) He = 1.6667 [-] (3.51) を使用した.空気・ヘリウム混合気では,各物性値は,以下の式で表される.
Mmix = (1-c)Mair+cMHe [g/mol] (3.52)
Rmix = R0/Mmix [J/(kgK)] (R0: gas constant, = 8313.8106 [J/(KmolK)]) (3.53)
Cpmix = {Mair(1-c)Cpair+MHecCpHe}/Mmix [J/(kgK)] (3.54)
mix = Cpmix/(Cpmix-Rmix) [-] (3.55)
較正では,ヘリウム濃度c に応じて式(3.53)および式(3.55)より算出した気体定数 Rmix,比熱 比mixを用いて,式(3.43)により質量流束を計算した.
3.3.3 濃度・質量流束計測で見込まれる誤差
較正にはヘリウム濃度が既知の混合気体を用いており,またソニックノズル出口の質量流 束はチャンバにおける総温・総圧から評価できる.この濃度・質量流束(cactu, uactu)と図 3.15,3.17 の較正結果を用いて各熱線の PDR から評価される濃度・質量流束(cmeas, umeas) との差を図 3.18 に示す.これにより計測される濃度・質量流束にどの程度の誤差が含まれ るのかを検証する.PDR の値は各濃度での質量流束の大きさに対応する.PDR が小さな領 域を除くと,濃度は±10%,質量流束は±10 kg/m2s で評価できていることがわかる.本研 究では主流マッハ数M∞ = 2.4 の吸い込み式超音速風洞を使用し,その質量流束は 115 kg/m2s である.そのため,計測時における誤差は濃度・質量流束ともに±10%程度であると推定さ れる.PDR が小さい領域で特に濃度の誤差が大きくなるのは前述のように等濃度線が密集 し,濃度による差が小さくなることが主な原因である. このような等濃度線の密集による誤差は適切な熱線材料を選定することで小さくすることができる.等濃度線は式(3.37)により与えられるため,その傾き・切片の濃度に対する変 化量を大きくすれば,等濃度線は互いに離れるはずである.式(3.37)の傾き・切片を濃度に より偏微分すると,次式が得られる. Slope
c B c B c d d k k c B c B c 2 1 2 1 2 1 1 2 2 1 (3.56) Intercept
c B c B c A c d d c c A R k l c B c B c A c A c f 2 1 2 2 1 1 1 1 2 1 2 1 (3.57) ここで,濃度の関数であるA’i(c), B’i(c)は熱線固有の関数であるため,明確に定義すること はできないが,抵抗の温度変化率比2/1,熱伝導率比 k1/k2,熱線直径比の平方根(d1/d2)0.5 が傾き・切片の濃度変化率に寄与することがわかる.本研究で使用した熱線はどちらもタ ングステン線で,その直径は 5 m と3.1 m であるため,(a2/a1) × (k1/k2) × (d1/d2)0.5および (d1/d2)0.5は1.27 であった.図 3.19 は 5 m タングステン線と5 m 白金線による較正結果 の一例である.ここで,タングステン線を添え字1,白金線を添え字 2 で示している.この 場合には(a2/a1) × (k1/k2) × (d1/d2)0.5は1.79,(d1/d2)0.5は1.0 となる.図 3.19 では,傾きの濃度 に対する変化率が大きいため,図 3.17 に比べて等濃度線が互いに若干離れていることがわ かる.このように式(3.37)の傾き・切片の濃度に対する変化率が大きい材料を選定すること により等濃度線を疎にすることができ,低PDR 領域での誤差を小さくすることができると 考えられる.しかし,超音速流では熱線にかかる流れの抵抗は極めて大きく,5 m 白金 線は線が破断,もしくは伸長してしまい,使用することができなかった.熱線の断線はも ちろん,熱線の伸長は熱線の抵抗値が大きく変化するため,それまでの較正結果は使用で きず,較正の段階からやり直さなければならない.そのため,計測精度の向上のためには, 式(3.37)の傾き・切片の濃度に対する変化率が大きい材料を選定することだけでなく,その 材料の強度も考慮に入れる必要があり,今後の課題である.3.4 2次元超音速混合層の計測
3.4.1 計測対象
本研究で提案した混合評価手法の有効性を確認するため,図 3.20 に示す薄い平板によっ て仕切られたマッハ数2.4 の空気流とマッハ数 0.4 のヘリウム流によって形成される2次元 超音速混合層のy 方向分布を計測した.座標系は,平板後縁スパン中央に原点をとり,流れ 方向をx,鉛直方向を y,スパン方向を z とする.図 3.21 は瞬間シュリーレン画像の一例で,ている様子が確認できる.熱線計測はx = 30 mm および x = 100 mm のスパン中央断面で行 った.なお,平板後縁で衝撃波が発生し風洞上壁で反射して混合層に入射すること,さら に熱線プローブを挿入した場合,その影響が亜音速流であるヘリウム流の上流に伝播する ことから,混合層は上下に偏向する.そこで,質量流束の変動実効値が最大となるy 位置を 混合層中央y0と定義し,−5 mm ≤ y−y0 ≤ 5 mm の領域でデータを整理した.なお,x = 30 mm ではy0 = 3 mm,x = 100 mm では y0 = 5 mm である.
![図 3.1 B-CVA(Basic CVA)回路 i w 2 [A]1/Rw [1/]0 0.001 0.002 0.003 0.0040.150.20.250.30.35Vin= 4 VVin= 5 VVin= 6 V1/Ra Measurement result 1st approximation 図 3.2 熱線の非加熱抵抗 R a の算出](https://thumb-ap.123doks.com/thumbv2/123deta/8512528.1805590/36.892.259.636.159.981/図31BCVABasicCVA回路iw2AVin=VVin=VVin=図熱線非加熱抵算出.webp)

![図 3.11 ピトー計測概略図 260 270240250220230200210190051015 x[mm]y[mm] 図 3.12 主流マッハ数 2.4 の超音速流壁面に発達する乱流境界層の平均シュリーレン画像 (ナイフエッジ:水平) u [kg/(m 2 s)]y [mm]0204060 80 100 120123456789 図 3.13 ピトー計測により得られた x = 262 mm における乱流境界層の質量流束分布](https://thumb-ap.123doks.com/thumbv2/123deta/8512528.1805590/40.892.143.743.146.728/ピトー計測マッハシュリーレンナイフエッジピトーによりにおける.webp)
