振動問題における入力同定と 誤差評価に関する研究
Force Identification and Error Evaluation in Vibration Problems
小林 樹幸
首都大学東京
2011 年
第 1 章 緒論
1.1 研究背景 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2 1.1.1 自動車の振動・騒音性能開発 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2
1.1.2 振動・騒音の性能向上手法(シミュレーションに基づく方法) ・・・・・・・・・ 4
1.1.3 振動・騒音の性能向上手法(実験に基づく方法) ・・・・・・・・・・・・・・・・・・・・・・ 5
1.1.4 TPA
の研究動向 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
61.1.5 従来の入力同定手法の問題点 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7 1.2 先行研究 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 8 1.3 他分野における逆問題 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 10
1.3.1 振動・騒音分野の逆問題 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 10
1.3.2 制御分野の逆問題 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11 1.4 研究目的 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11 1.5 論文の構成 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13
第 2 章 従来の入力同定手法
2.1 緒論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 16 2.2 周波数応答関数の推定方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 17
2.2.1 H1
推定(1 点加振) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
172.2.2 H1
推定(多点同時加振) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
192.2.3 多重関連度関数 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 20
2.2.4 偏関連度関数 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 21 2.3 逆行列法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 25
2.3.1 逆行列法による入力同定 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 25
2.3.2 逆行列法における誤差伝播 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 26 2.3.3 特異値分解を用いたノイズの除去方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 29 2.3.4
の正則化法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
2.6.2 解析方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 43 2.6.3 入力同定結果(減衰と同定精度の関係) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 44 2.6.4 特異値分解によるノイズ除去の適用 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 45 2.6.5 Tikhonov
の正則化法の適用 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
49 2.7 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 51第 3 章 動質量推定に基づいた入力同定手法
3.1 緒論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 53 3.2 動質量法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 53 3.2.1 動質量の推定方法(多点同時加振) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 54
3.2.2 動質量の推定方法(1
点加振) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
563.2.3 従来の H2
推定法との相違点 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
563.2.4 固有値分解によるスペクトル行列の逆行列算出 ・・・・・・・・・・・・・・・・・・・・ 58
3.2.5 動質量法による入力同定方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 59
3.2.6 動質量法における誤差伝播 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 59 3.3 動質量の物理的特性 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 63
3.3.1 1
自由度系 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
633.3.2 多自由度系 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 64 3.4 シミュレーションによる検証 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 68
3.4.1 動質量の比較 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 68 3.4.2 入力同定結果(伝達経路数と応答計測点数が等しい場合) ・・・・・・・・・・・・・ 71
3.4.3 入力同定結果(応答計測点数の方が多い場合) ・・・・・・・・・・・・・・・・・・・・・・ 72
3.4.4 固有値分解によるノイズ除去の検討 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 74
3.4.5 減衰と同定精度の関係 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 78
3.4.6 経路の見落としによる同定誤差 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 80 3.5 簡易構造物を用いた検証 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 81
3.5.1 実験方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 81
3.5.2 入力同定結果(フレームのみ計測) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 84
3.5.3 入力同定結果(フレームとパネルで計測) ・・・・・・・・・・・・・・・・・・・・・・・・・・ 86 3.6 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 89
93
4.2.1 偶然誤差 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 93
4.2.2 系統誤差 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 93 4.3 同定誤差と分散の関係 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 94 4.4 動質量の推定誤差に起因する分散推定方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 95
4.4.1 スペクトル行列の逆行列を直接計算する場合 ・・・・・・・・・・・・・・・・・・・・・・ 96
4.4.2 採用固有値数を減らして逆行列を求める場合 ・・・・・・・・・・・・・・・・・・・・・・ 98 4.5 実稼動加速度の変動に起因する分散推定方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 100
4.5.1 導入 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 100
4.5.2 主成分分析 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 100
4.5.3 主成分分析を用いた実稼動応答の分散・共分散推定 ・・・・・・・・・・・・・・・・・ 102 4.6 信頼係数 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 103 4.7 シミュレーションによる検証 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 104
4.7.1 動質量の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 104
4.7.2 実稼動応答の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 106
4.7.3 同定加振力の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 107
4.7.4 信頼係数の推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 109 4.8 簡易構造物を用いた検証 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 111
4.8.1 同定加振力の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 111
4.8.2 信頼係数の推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 114 4.9 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 115
第 5 章 逆行列法による同定加振力の誤差評価
5.1 緒論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 117 5.2 アクセレランスの推定誤差に起因する分散推定方法 ・・・・・・・・・・・・・・・・・・・・・・・ 117 5.3 アクセレランスの分散・共分散推定方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 118 5.4 クロススペクトルを用いる場合 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 120 5.5 シミュレーションによる検証 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
第 6 章 実構造物への適用
6.1 緒論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 133 6.2 実験概要 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 134 6.3 入力同定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 137 6.4 動質量法による同定加振力の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 140 6.5 逆行列法による同定加振力の分散推定結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 142 6.6 同定精度に関する考察 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 145 6.7 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 147
第 7 章 結論
7.1 結論 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 149 7.2 今後の方針 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 154
付録
付録
A 最小二乗残差を用いた分散推定 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 157付録
B 周波数応答関数の分散(1点加振) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
158付録
C シミュレーションにおける伝達力と同定誤差 ・・・・・・・・・・・・・・・・・・・・・・・・・・ 160付録
D 実稼動モード解析によるエレベータ乗りかごの動特性推定 ・・・・・・・・・・・・・・ 164付録
E 条件数に関する定理 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 175付録
F Hv推定法による動質量推定 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
176付録
G 平板加振試験におけるアクセレランス ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 178参考文献
謝辞
+
擬似逆行列
*
複素共役
T
転置
H
複素共役転置
m
加振点数,伝達経路数
n
応答計測点数
N FRF
推定における平均化回数
a
実稼動加速度[m/s
2]a
実稼動加速度ベクトル(n x 1)
Ca
実稼動加速度の分散・共分散行列(n x n)
Cgi
動質量の分散・共分散行列(n x n)
Ch
アクセレランスの分散・共分散行列(m x m)
Cx
加振力の分散・共分散行列(N x N)
Cy
加速度の分散・共分散行列(N x N)
ε FRF
推定用加振試験における誤差
ε FRF
推定用加振試験における誤差ベクトル(N x 1)
E
期待値
f
実稼動時の加振力[N]
f
実稼動時の加振力ベクトル(m x 1)
G
動質量[N/(m/s
2)]G
動質量行列(m x n)
H
アクセレランス[(m/s
2)/N]H
アクセレランス行列(n x m)
κ
条件数
x FRF
推定用の加振力[N]
y FRF
推定用の加速度[m/s
2]Y
加速度のフーリエスペクトル行列(N x n)
(i)
第
i回目の計測値
ベクトル の第 成分
第 1 章
緒 論
1.1 研究背景
機械構造物が稼動状態にあるとき(本研究では実稼動と呼称する)には,その機械が稼 動することによって構造物の各部へ外力が生じる.例としては,工作機械や重機,そして 自動車・鉄道などの輸送用機械などがある.これらの外力は,機械の使用者や製造する品 物に対して悪影響を与える.例えば重機の中でも建設用機械の場合には作業従事者の健康 へ悪影響を与えることも考えられる.特にチェーンソーやグラインダーなどの使用による 振動障害が問題となるケースが知られている.そして自動車の場合には,エンジンによる 起振力や路面からの強制変位入力によって乗員にとって不快な振動や騒音が与えられる.
このように,振動や騒音が問題となる箇所(開発においては評価の対象となるため,本 論文では評価点と呼称する)における機械構造物の振動・騒音を低減するためには,評価 点に作用する加振力を計測することが有効である.しかし
1.1.2項で述べるように,多くの 場合では加振力を直接計測することは困難であるため,何らかの方法で入力を同定する必 要があり,これを本論文では入力同定と呼称する.
本論文で議論する入力同定という手法は,画像処理,音源探査など工学の分野において 幅広く実用されており,中でも機械構造物全般における振動・騒音低減に対して効果的な 手法として,長い間用いられている.特に,同定された加振力と伝達関数の積として寄与 を評価する伝達経路解析(Transfer Path Analysis,以下
TPA)が機械構造物の設計初期段階において頻繁に用いられている.TPA は主に自動車業界で用いられることが多く,最初に 提案されてから約
20年の間に様々な関連手法が提案され,発展してきた.しかし一方で,
後に述べるように,多くの実験工程を必要とすることや,得られる寄与の信頼性が低いな どの問題点も依然として知られている.これは
TPAにおける寄与の推定精度が主に入力同 定精度に依存しており,十分な精度で入力を同定できていないことに起因する.
以上のように,入力同定は特に自動車業界において需要があるため,本節では自動車の 振動・騒音性能の開発について取り上げ,続けて振動・騒音の対策手法として一般に幅広 く用いられている手法を述べることによって入力同定の必要性を示す.そして最後に,従 来の入力同定手法がもつ問題点を述べる.
1.1.1 自動車の振動・騒音性能開発
地球環境の観点から,様々な分野の産業に対して
CO2排出量の削減が求められている.
量が低減するだけではなく,剛性の低下を引き起こすことが多く,軽量化と車内音の静粛 化は相反する傾向にある.
また,ハイブリッド車や電気自動車など電動車両では動力源からの振動・騒音が小さい ため,従来のガソリンエンジンでは目立たなかったロードノイズ音が顕著に表われるよう になる.同様に前述の転がり抵抗を低減させることによっても,車室内の騒音低減の必要 性が高まる.
一方で,車室内騒音の低減に対する要求は確実に高まっている.図
1.1に示すように,車 内音は数十年の間に明確に低減されており,この傾向はこれから先も続くものと考えられ る
[3].
このように,環境の観点からは車両の軽量化が求められ,同時に車室内の低騒音化が求 められている.そして一方では,開発期間の短縮化が進んでいる.図
1.2には,1996 年時 点における開発期間から,2001 年における国内外の自動車メーカーの開発期間の目標を示 す
[4].このように各社とも年々開発期間の短縮を図っており,短期間で新車の開発を行なう 必要がある.通常,開発期間の短縮化と車両の性能向上とは相反する関係にあるため,前 述の車室内騒音低減に対する更なる要求を短期間で満たすためには,シミュレーションお よび実験計測に基づく効率的な開発手法が必要となる.
以上を踏まえて,車体の構造変更によって,車両重量を増やすことなく車室内の騒音を 低減させるための効果的な技術が不可欠であると言える.そこで
1.1.2項と
1.1.3項では,
自動車の振動・騒音の性能向上手法について,シミュレーションに基づく方法と実験計測 に基づく方法を紹介する.
図
1.1 車室内音 騒音低減の変遷50 55 60 65 70 75 80
40 50 60 70 80 90 100
車速[km/h]
騒音レベル [dBA]
1965平均 1975平均 1985平均 1995平均
0 5 10 15 20 25 30 35 40 45 トヨタ
日産 マツダ GM
2001年時点目標 2000年時点目標 96年時点目標 96年時点状況
図
1.2 開発期間短縮の遷移開発所要月数
1.1.2 振動・騒音の性能向上手法(シミュレーションに基づく方法)
自動車室内の振動騒音は周波数ごとに図
1.3のように分類される
[5].一般に低周波とよば れる
200Hz以下の周波数領域については,有限要素法(Finite Element Method,以下
FEM)や境界要素法(Boundary Element Method,以下
BEM)を用いた性能予測が行なわれている[6]
.これは,近年コンピュータの計算処理能力が著しく向上したことで,製品開発の中で図 面を元にした大規模車体
FEMモデルの解析が可能になったためである.
ただし,コンピュータの性能向上によって大規模かつ精確な
FEMモデルの構築が可能で あるが,車内音の性能予測を高精度に行なうためには,自動車が実稼動状態にあるときに 車体へ作用する力の,作用点と加振力を知る必要がある.
自動車の場合,
200Hz以下の振動・騒音の主な起振源は,エンジンと路面からの入力であ る.エンジンから発生した加振力は,エンジンマウントやトルクロッド,トランスミッシ ョンなどを介して車体へと伝播する
[7].そのため,走行中これらの部位に作用する力を実験 的に計測もしくは同定する必要がある.
一方で,200Hz 以上の周波数においては車体のモード密度が非常に高くなるため,FEM
による解析は計算時間の観点から困難になる.
800Hz以上の周波数においては減衰が十分に
図
1.3 四輪自動車室内の振動騒音現象に対する一般的な周波数帯域1.1.3 振動・騒音の性能向上手法(実験に基づく方法)
実験解析に基づいて,振動・騒音の性能を向上させるためには,初めに問題となる振動 や騒音が発生する周波数を調べ,その周波数における振動・騒音の強さを計測する必要が ある.そしてその上で,加振源や騒音源から評価点までの伝達関数を計測し,問題となる 部位の質量・剛性・減衰を変更(構造変更)することによって性能を向上させる.対象と する周波数を特定するために,
200Hz以下の低周波領域においては,実験モード解析や伝達 関数合成法のような手法が活発に研究され,発展してきた
[7][10].
構造変更を行なう部位を特定するための手法としては,主成分分析(Principal Component
Analysis,以下 PCA)[11][12]や相関解析(Coherence Analysis)が用いられてきた
[13][14].タイ ヤが路面から入力を受け,互いに独立して振動するロードノイズの場合にはこれらの手法 が適用できる.しかし,ボディに結合されたエンジンやミッションなどの駆動部は,互い の振動に相関が生じるため,これらの手法を適用できない.そこで提案されたのが伝達経 路解析(Transfer Path Analysis,以下
TPA)である[15].手法の詳細は次項で述べるが,TPA では各入力点から車体へ伝わる力を計測もしくは同定する必要がある.ここで入力点とは,
ボディとサスペンションの結合部や,エンジンマウント・トルクロッドなどの結合部位を 指す.
TPA
は提案されて以来,様々な研究が行なわれ,多種多様な解析ツールが作られてきた.
そして現在では,実験計測に基づいた振動・騒音性能の評価手法として自動車の開発現場 で使用されている
[16].
エンジン(低中高速)こもり音 エンジン透過音
アイドル振動・
こもり音 エンジン振動伝達音 トランスミッション・デフ ギア音 パワー
トレイン入力
タイヤノイズ
パターンノイズ タイヤ入力
低周波ロードノイズ ロードノイズ 風切り音 路面入力
ブレーキノイズ
ブレーキ鳴き 5 10 50 100 500 1k 5k 10k
周波数 [Hz]
ブレーキ入力
1.1.4 TPA の研究動向
TPA
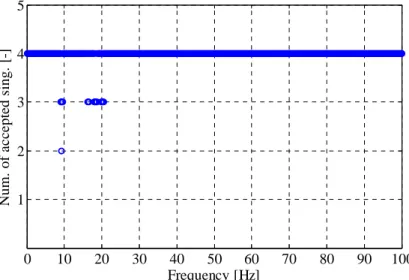
では自動車の車体を,外力が作用する駆動系(Active part)と,駆動系から内力を受 けて応答を生じる受動系(Passive part)とに分離する.境界
iに作用する内力を
fiとし,i から評価点までの伝達関数を
hiとすると,評価点における音圧(もしくは振動)
Pは次式で 表される.
(1.1)
∑
∑
= ==
=
mi i m
i i
i
f p
h P
1 1
ここで
piは,評価点における応答に対する,駆動系と受動系の境界面
iに作用する力からの 寄与音圧(もしくは寄与振動)を表す.TPA ではこの寄与を評価することで,構造変更が 必要な部位の判断やランキングを行なう.従来の
PCAや相関解析では,相関のある入力が 作用する場合には寄与の分離ができなかったため,自動車業界において
TPAが着目される こととなった.また,TPA とは少し異なるが,寄与音圧の評価に基づいた鉄道車両の低騒 音化も成されており,TPA の概念は各分野において広く知られている
[17][18].
TPA
において伝達関数は,ハンマリング試験などの一般的な振動試験によって計測でき る.しかし,実稼動時において駆動系と受動系の境界に作用する力の直接計測は,一般的 には不可能なケースがほとんどである.これは,境界にはロードセルなどの力計測器を設 置するのに十分なスペースや平面が確保されていないことと,ロードセルの設置によって 系の動特性が変化することなどによる.そこで,次項で述べるように,動バネ法や逆行列 法という間接計測あるいは同定手法が用いられている.そしてこの点が,TPA における寄 与の推定精度を低下させている要因である.そして本研究では,このように直接計測不可 能な力を逆問題的に同定することを入力同定と呼称する.
TPA
が発表された後,
TPAのプロセスや精度に関する多くの論文が発表され,
1つの製品 として完成された
[19][20].しかし,伝達関数を計測する際に,駆動系を受動系から切り離す 必要があり,また伝達関数の計測点(加振点・応答点)は非常に多くなるケースがほとん どであり,実験工程の膨大さが
TPAの短所である.
そ こ で 能 村 ら は 力 の 同 定 を 必 要 と し な い 新 た な
TPAの 手 法 と し て , 実 稼 動
TPA(Operational Path Analysis,以下
OPA)を提案した[21].この手法は,駆動系と受動系を分離
することなく,境界の加速度を計測し,加速度を入力と考えて寄与解析を行なう.そのた
め,実験工数は大幅に削減可能であるが,各境界に作用する力が無相関でなければ従来の
TPAと同様の寄与を得ることができないとして,数々の議論が成された
[22][23].そして
OPAの改善策として新しい実稼動 の手法が提案された
[24].この手法は,OPA より寄与の推
いくつも提案されているが,いずれの手法も物理的な解釈が困難であり,一般には受け入 れられにくいのが現状である.
1.1.5 従来の入力同定手法の問題点
広く用いられている入力同定手法に,動バネ法(Mount Stiffness Method)と逆行列法(Matrix
Inversion Method)がある[25][26].
動バネ法では,境界
iにおける駆動系と受動系の変位を計測し,別途計測された境界部の 動剛性値
kiを用いて次式によって伝達力を推定する手法である.
(
i p)
a i i
i
k x x
f =
#−
# (1.2)ここで
xi#a
は駆動系の変位,x
i#pは受動系の変位を表す.動バネ法の理論や計算は逆行列法 よりも簡便である.しかし,ブッシュ類などの境界部の動剛性値を正確に計測することが 困難であることや,境界部の剛性が高いと計測した変位の
SN比を確保できないことなどの 理由により,正確な内力を得られない場合がある
[27].
逆行列法では,駆動系を受動系から切り離した状態で,受動系における駆動系との結合 点を加振して伝達関数(アクセレランス[(m/s
2)/N])を計測する.得られたアクセレランス Hj,iと,実稼動時の応答加速度(以下,実稼動応答)a
jとの間には以下の関係が成り立つ.
(1.3)
⎪ ⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
⎪ =
⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
m m n n
m
n
f
f
H H
H H
a a
M L
M O M
L M
1
, 1
,
, 1 1
, 1 1
式(1.3)において[H]
-1を両辺の前から乗じることで力を同定するのが逆行列法である.この 手法の問題点として,受動系から駆動系を分離する必要があるため,多くの実験工程を必 要とするという点が挙げられる.通常,実車両の
TPAに逆行列法を用いると,TPA の実験 に約
1週間を費やす必要がある.そしてもう一つの問題点として,逆演算によって力を同 定するため,誤差の影響を受けやすい点がある
[28][29].これほどの実験工数を必要とするに もかかわらず,計測誤差の影響によって必ずしも正確な入力を同定できるわけではないと いうことが現状の
TPAに関する問題点であると共に,前述の
OPAが普及するに至った要因 でもある.
このように,実稼動状態において構造物に作用する力を間接計測あるいは同定する手法
は,機械構造物の低振動・低騒音化のために必要である.しかし,同定手法には計測値の
不確かさや誤差の影響などの問題点があり,計測工数のわりに精度が保証されていないの
が現実である.そのため,より高精度に入力同定可能な手法,もしくは同定誤差を評価す
る手法が求められている.
1.2 先行研究
前節では,入力同定が必要とされている背景と,従来の入力同定手法の問題点を示した.
本節では,入力同定手法の精度向上や誤差解析の方法,そして新しい入力同定手法として どのような研究が成されているかを述べる.そして最後に,入力同定における課題を明ら かにする.
前述のように,入力同定には動バネ法と逆行列法が用いられることが一般的であるが,
このことは
TPAが提案された論文において,加振力の同定には逆行列法を用いるかまたは 動バネ法を用いるということが述べられている
[15].そして
TPAが発表された
2年後の文献
[19]
においては,逆行列法による入力同定精度についてシミュレーションと簡易構造物を用 いた検証を行なっている.この文献では,主にアクセレランス行列の条件数
[30]を用いて議 論が成されており,特に新しい手法の提案は成されていない.
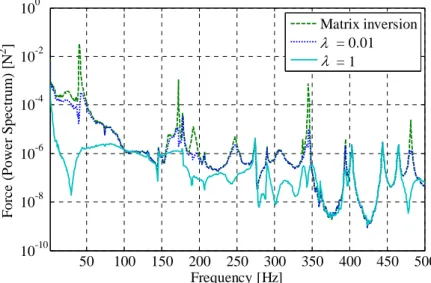
逆行列法による同定精度を改善する方法としては,Tikhonov の正則化法(
Tikhonov Regularization)による精度改良法がある[31][32][33].この方法は,係数行列が極めて悪条件で ランク落ちかそれに近い場合に,解ノルムに重み付けを行なって解の精度を向上させる手 法である.しかし自動車のような構造物の場合には,減衰が大きい場合が多く,第
2章で 述べるように減衰が大きい構造物ほど計測誤差の影響を受けにくくなる傾向にあるため,
Tikhonov
の正則化法のメリットを活用できる場面は少ないと言える.
その他に,重み付け最小二乗法による同定精度の改善も提案されている
[34].この研究で は実稼動応答の計測誤差が既知であると仮定しているが,実際には誤差の大きさは未知で ある場合がほとんどであるため,重み係数の決定が困難であると言える.
また,TPA の製品にも組み込まれていて広く知られている手法が,特異値分解を用いた 擬似逆行列のノイズ除去である.最小二乗法において係数行列の特異値分解を行ない,最 大特異値に対して十分に小さい特異値をノイズとみなし,切り捨てることで擬似逆行列を 得る手法で,広く用いられている.特に振動解析の分野では,伝達関数合成法において使 用されることが広く知られている
[35][36].この手法に関しても,厳密には特異値分解でノイ ズを分離することは難しく,しかも採用特異値数を減らすことで擬似逆行列はランク落ち するため,誤差伝播の観点からも好ましい手法とは言えない.この手法では,仮に係数行 列(周波数応答関数行列)のノイズを除去できたとしても,実稼動応答に含まれるノイズ は除去できないので,擬似逆行列のランク落ちに伴う誤差伝播の増大の危険がある.
逆行列法における同定誤差に関する研究は文献
[19][29]で成されている.いずれにおいても,
アクセレランス行列の条件数に基づいて議論が成されており,また力の真値が未知の状況
ている.
また,新しい入力同定の手法としては,独立成分分析(Independent Component Analysis,
以下
ICA)の適用が挙げられる[38][39].
ICAは,応答計測のみに基づいた入力の推定手法で,
画像処理や音声処理において広く用いられており,振動・騒音分野では騒音分離
[40]やモー ド解析
[41]にも適用が試みられている.そして最近では中野らが,路面からの入力変位を同 定する方法を提案している
[42].しかし
ICAは,入力の絶対値や,分離・推定された入力が どの入力点に作用するのかが未知である.そのため,入力同定に適用するためには更なる 研究が必要である.
また同様に小机らはホログラフィックニューラルネットワークを用いた入力同定を提案 している
[43].従来手法と比較してノイズの影響を受けにくいという利点があるものの,
Expansion term
数や参照点数などのパラメータの設定次第で同定結果に差が生じる場合があ
る.
実車両における入力同定では,ほとんどの場合が点接触ではなく,面接触している部位 に作用する力を同定することになる.そのため,第
4章で述べるように,面接触部位に作 用する力を点における力に代表させると,正確な分布荷重を同定することができない.河 村らは有限要素法における形状関数を用いることで,分布荷重を同定する手法を提案して いるが,梁や平板などの簡易構造物にしか適用できない点や,パラメータの設定によって 同定結果が異なるため,現在のところは実用上の課題が残されている
[44].
最も新しい研究動向としては,カルマンフィルタを用いた時間領域での入力同定法が提 案されている
[45].この手法では,風による外力や,橋梁などにおける移動荷重も理論的に は同定可能であるが,この場合には有限要素法などを用いて対象物の状態空間モデルを得 る必要があるため,モデル化誤差による同定誤差が顕著に生じる可能性がある.
以上のように,入力同定手法に関しては様々な研究が成されているが,一般的な構造物
に適用可能で顕著に同定精度が改善される手法は提案されていない.また,同定誤差の評
価に関してもアクセレランス行列の条件数を用いることが一般的であり,新たな誤差評価
指標が必要であると考えられる.
1.3 他分野における逆問題
本研究で対象とする,逆行列法による入力同定は最小二乗法で力を同定する手法であり,
逆問題としてはとても基本的な考え方に基づいている.そのため,振動・騒音の分野だけ ではなく,工学の他分野との関連性を考慮することも重要であると考える.逆問題と言わ れる問題には,医学診断のための
MRI,発震機構の決定,亀裂の探知,画像復元など数多く挙げられる
[46].本節では,振動・騒音および他分野における逆問題の一例を取り上げ,
本研究の対象とする入力同定との関連性について述べる.
1.3.1 振動・騒音分野の逆問題
振動問題には,入力同定以外にも数多くの逆問題が存在する.振動の分野における逆問 題の代表例として,特性行列同定
[47]や実験モード解析が挙げられる
[48].実験モード解析と は,加振実験から得られたインパルス応答もしくは周波数応答関数を用いて,固有振動数,
モード減衰比およびモード形状というモード特性を同定する手法である.周波数応答関数
は,これらモード特性の関数として記述できるため,本手法は逆問題である.ただし,モ
ード形状は周波数応答関数の線形項(分子)に記述されるのに対し,固有振動数・モード
減衰比は非線形項(分母)に記述されるため,線形最小二乗法ではモード特性を同定でき
ない.そこで,非線形最小二乗法を用いた反復計算を行なう手法が用いられることが多い
[49].
入力同定と同様に,同定されるモード特性は周波数応答関数の計測誤差の影響を受けやす
いため,周波数応答関数の分散の逆数を重み関数にした手法が提案されている
[50].
上記の実験モード解析は人工的な加振力を作用させることで加振力と応答を計測し,こ
れらに基づいて得られる周波数応答関数を用いてモード特性同定を行なう.しかし,人工
的な加振が困難な構造物もあり,実験モード解析が適用できない場合もある.これらのケ
ースに対して有効な手法が,応答計測のみに基づく実稼動モード解析である.実稼動モー
ド解析は,対象とする構造物が稼動状態にあるときの応答を計測してモード特性を同定す
る手法であるため,実際の境界条件に基づいた動特性の推定が可能である.実稼動モード
解析にも,実験モード解析と同様に周波数領域法と時間領域法があるが,著者らは周波数
領域法の一つである
FDD法(Frequency Domain Decomposition)を用いてエレベータ乗りか
ごの動特性推定を行なった
[51].この研究も,実稼動時の加振力が未知であり,なおかつ応
答計測データに基づいてモード特性を同定する逆問題であるという点で,入力同定と類似
いて研究が成されているが,音源同定手法は本論文でも用いる逆行列法の考え方に基づい ている.そのため,特異値分解によるノイズ除去が可能であるが,閾値の設定次第で同定 精度が大きく変化する.このことは本論文で用いる逆行列法・動質量法にも共通すること である.
1.3.2 制御分野の逆問題
制御工学における逆問題としてシステム同定が挙げられる.システムのモデルを構築す るには,物理・化学的な自然科学法則に基づくモデリングがあるが,これは対象の特性を 熟知した技術者の能力に大きく依存し,モデリングのための一般的方法は存在しない.一 方で,実システムの入出力データに基づいてシステムの外部特性である伝達関数を同定す るのがシステム同定であり,実システムと数理的な制御理論を結ぶための普遍的な方法論 である
[53].
振動工学における周波数応答関数の推定と同様に,システム同定においても最小二乗法 を用いる方法が一般的である.また,同定誤差の評価をいかにして行なうかという点が,
入力同定と同様に今後の課題として残されている.
1.4 研究目的
前節までにおいて,機械構造物,特に自動車の性能開発においては更なる低振動・低騒 音化が求められる一方で開発期間の短縮の必要性があることを述べた.そして効果的な低 振動・低騒音化の解析手法として近年注目されているのが
TPAであり,TPA における寄与 の推定精度は実稼動時の入力同定精度に大きく依存する.そのため,高精度な入力同定手 法が求められていると言える.
そこで本研究では最初に,従来の入力同定手法である逆行列法の特性をシミュレーショ ンと加振試験に基づいて評価する.特に,前述の
Tikhonovの正則化法や特異値分解による ノイズ除去手法の妥当性について検討を行ない,新たな入力同定手法の必要性を示す.ま た,入力同定精度の評価値として広く知られているアクセレランス行列の条件数と,実際 の入力同定誤差との関係について,同様にシミュレーションと加振試験に基づいて評価を 行なう.
これらの結果を踏まえて,従来の入力同定手法である逆行列法と同等の実験工数で,逆
行列法よりも高精度に入力同定可能な手法を提案することを本研究の目的とする.逆行列
法においては,アクセレランス行列の逆行列を算出する際の誤差伝播は避けることができ ないため,本研究ではアクセレランス行列の逆の次元をもつ動質量行列を加振試験から直 接推定する入力同定手法(動質量法)を提案する.しかし伝達関数の一つである動質量は あまり一般的な物理量ではないため,動質量行列の推定方法・動質量法による入力同定方 法とともに動質量行列に関する物理的な解釈方法も導入する.提案した入力同定手法の妥 当性は,シミュレーションによる検討と,簡易構造物を用いた加振実験から検証を行なう.
そして,提案する入力同定手法によって同定される力の誤差評価手法を提案する.これ は,動質量法では動質量行列が長方行列の場合には条件数と誤差伝播の関係が成り立たな いためであり,本研究で提案する手法は加振試験および実稼動試験における偶然誤差によ る入力同定誤差を定量的に評価する手法である.具体的には伝達関数のコヒーレンス関数 や,実稼動応答データに対して主成分分析を適用することによって,誤差の定量評価を行 なう.また従来の入力同定手法である逆行列法については,条件数に代わる新しい誤差評 価手法を提案する.そしてこれらの誤差評価手法の妥当性および条件数に対する優位性を,
シミュレーションと簡易構造物に適用することで示す.
最後に,本研究で提案する手法を実構造物の代表例として完成車両に適用し,実用上の 妥当性についても検証を行なう.
なお,TPA では音圧の寄与を評価することがほとんどであるが,本研究では比較的物理 的な解釈が容易な振動のみを研究の対象とする.これは,対象が振動であっても音であっ ても,入力同定や寄与評価の手法は同じためである.
また,本研究では振動現象の中でも,比較的低周波の領域を対象とする.これは,自動
車の振動・騒音性能の中でも特に重要視されるこもり音とよばれる現象に対して
TPAが適
用される事例が多いためである.
1.5 論文の構成
本論文は全
7章から構成されている.
第
1章では機械構造物,特に自動車の振動・騒音性能開発の現場における入力同定の重 要性について述べ,従来の入力同定手法では必ずしも十分な同定精度を確保できていない という現状を述べた.これを踏まえて,新たな入力同定手法の提案と,同定誤差の評価手 法の提案を本研究の目的とすることを述べた.
第
2章では,従来の入力同定手法である逆行列法について述べる.本研究で提案する入 力同定手法と従来手法との相違点を明確にするために,周波数応答関数(アクセレランス)
の推定方法(H
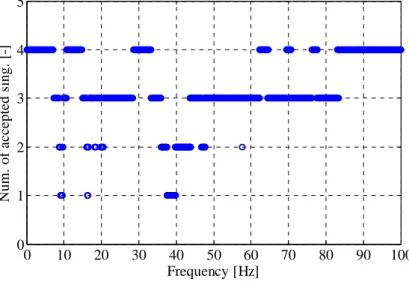
1推定)を初めに説明する.そして平板を用いた加振試験とシミュレーショ ンを用いて,逆行列法による入力同定精度を定量的に評価してゆく.具体的には,
Tikhonovの正則化法による入力同定精度の改善,特異値分解を用いてアクセレランス行列のノイズ 除去を行なう手法や,減衰の大小と入力同定精度との関係について考察を行なう.そして,
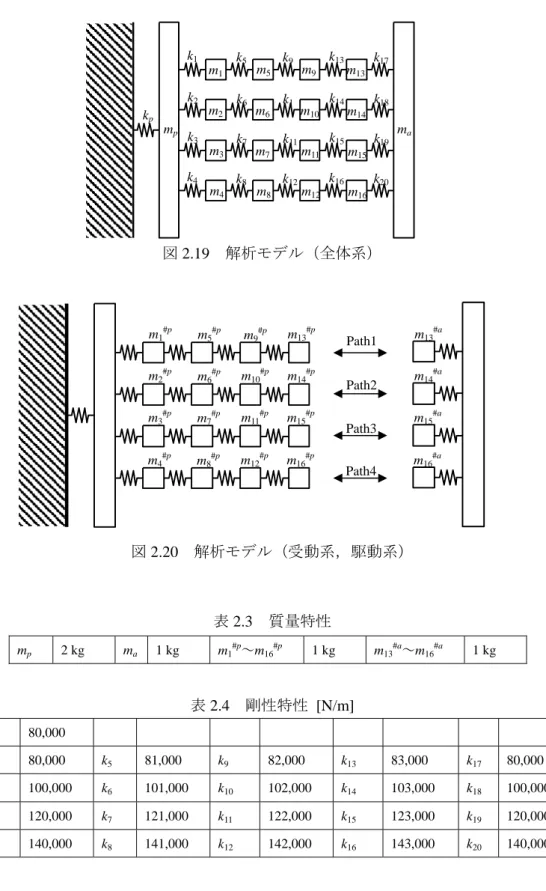
逆行列法による入力同定精度とアクセレランス行列の条件数との関係などについても明ら かにしてゆく.なお第
2章で使用するシミュレーションモデルは,次章以降でも同様に使 用するため,モデルや解析方法について詳細に記している.
第
3章では,前章の結果を踏まえて,動質量推定に基づいた入力同定手法である動質量 法を提案する.動質量法と逆行列法との相違点を明確にするため,初めに動質量の推定方 法を説明する.逆行列法では,応答信号の予測誤差を最小化することでアクセレランスを 推定するのに対し,動質量法では入力信号の予測誤差を最小化することで動質量行列を推 定している.この手法は
H2推定法として従来から知られている.従来の
H2推定法は入力点 数と応答点数が等しいという制約の下にしか成り立っていなかったが,本研究で提案する 動質量法にはこの制約が無いことを記す.そして,逆行列法では応答信号の予測誤差を最 小化してアクセレランスを推定する(H
1推定法)のに対し,動質量法では入力信号の予測 誤差を最小化して動質量を推定する(H
2推定法)という点が最も顕著な相違点である.
第
3章においても第
2章と同様に,動質量行列の条件数と誤差伝播の関係式を導出する が,動質量法においては動質量行列が正方行列の場合についてのみ誤差伝播の関係式が成 立する.
また,アクセレランスは実験モード解析などでも頻繁に用いられるため良く知られてい る物理量であるが,動質量は物理的な因果関係が反転していることもあり,解釈が困難な 物理量である.そこで第
3章では動質量行列の物理的な解釈方法についても述べる.
そして第
2章で使用したシミュレーションと,新たに箱型構造物を用いた加振試験を行
ない,動質量法によって入力同定精度が向上することを示す.また,シミュレーションを
通じて,動質量法によって推定される動質量行列と逆行列法で得られる動質量行列とが異
なる理由について述べる.特に,動質量法によって同定される力は真値に対して過小評価 される傾向にある理由について述べる.
第
4章では,初めに入力同定における誤差の要因と,本論文における同定誤差の評価方 法について述べる.そしてこれらを踏まえた上で,動質量法によって同定される加振力の 同定誤差評価手法を提案する.これは,動質量法は逆行列法とは異なり,順演算で入力を 同定するために条件数を用いた誤差伝播の予測ができないためである.本研究では,FRF 推定や実稼動計測における偶然誤差によって生じる同定誤差を評価するため,同定加振力 の分散を推定することで同定加振力の誤差評価を行なう.同定加振力の分散は,動質量と 実稼動応答の分散・共分散を用いることで推定され,動質量の分散・共分散はコヒーレン ス関数を用いて推定される.また,実稼動加速度の分散・共分散は,加速度スペクトルの 主成分分析を用いて評価する.提案した分散推定手法を,シミュレーションと簡易構造物 を用いた加振試験に適用することで,妥当性を検証する.
第
5章では前章と同様に,逆行列法の同定誤差を評価する手法を提案する.動質量法の 誤差評価手法の方が,逆行列法より導入が容易なので,動質量法の説明を先としている.
逆行列法による同定加振力の分散は,アクセレランスの分散・共分散を用いて推定可能で あり,これらはコヒーレンス関数を用いて推定される.そして提案した手法をシミュレー ションと簡易構造物に適用することで,有効性を検証する.また,推定された分散を用い て得られる同定加振力の信頼係数を提案し,従来の条件数よりも同定誤差の評価に適して いることを示す.さらに,逆行列法と動質量法によって同定された力の信頼係数を比較す ることで,動質量法の優位性を示す.本研究で提案する同定誤差の評価手法は,従来の条 件数を用いた誤差評価手法とは異なり,計測データに含まれている誤差を定量的に評価し ている.
第
6章では,これまでに提案してきた手法を,実構造物の代表例として完成車両に適用 し,簡易構造物と同様に同定精度が向上することや,誤差評価が可能であることを示す.
また,入力同定精度が低下する要因と,適切な計測点の選択方法について考察する.
最後に第
7章で結論を述べ,今後の課題を明確にする.
第 2 章
従来の入力同定手法
2.1 緒論
本章では,従来用いられている入力同定手法である逆行列法を導入する.逆行列法では 加振試験から推定されるアクセレランスと実稼動時に計測される加速度(実稼動応答)に 基づいて入力同定を行なう.周波数応答関数(Frequency Response Function,以下
FRF)の推定方法は基本的な事実として周知されているが,本研究で提案する動質量法による入力 同定と逆行列法との比較を明確に行なうために,本章では最初に
2.2節において,一般的な
FRFの推定方法である
H1推定法について,
1点加振と多点同時加振の場合について述べる.
FRF
推定法の導入に付随して,計測データの信頼性を示す評価値であるコヒーレンス関数
(関連度関数)について説明する.これは,第
4章と第
5章においてコヒーレンス関数に 基づいて入力同定の誤差評価を行なうためであり,同様に多重関連度関数と偏関連度関数 についても述べる.
FRF
の推定法を導入した後に,逆行列法について
2.3節で述べてゆく.また逆行列法につ いて,計測されたデータから同定された加振力スペクトルへと伝播する誤差と,アクセレ ランス行列の条件数との関係について,摂動法を用いて明らかにする.そして,最小二乗 法による求解の精度向上手法として一般的に用いられている特異値分解によるノイズ除去 手法と,Tikhonov の正則化手法について説明する.これらの手法は,後のシミュレーショ ンで適用することによって手法の妥当性を検証する.
2.3
節では,実稼動加速度のフーリエスペクトルに基づいた入力同定について述べてきた が,TPA において,評価点の音圧を効果的に下げるためには,評価点における音圧と実稼 動応答とのクロススペクトルを平均化して入力同定に用いることが推奨されている.そこ で
2.4節では,クロススペクトルを用いる入力同定も,2.3 節で述べたフーリエスペクトル を用いる方法と同様に行なえるということを示す.
2.5
節では,平板を用いたハンマリング加振試験のデータに基づいて,実際に逆行列法に よる入力同定を行なう.通常の入力同定では,複数の点に対して同時に加振力が作用し,
これらの加振力をすべて同時に同定するが,ここでは逆行列法による同定精度を単純に考 察するため,1 点加振による入力同定を行なう.そして,条件数と入力同定精度の関係につ いても考察する.2.6 節では,シミュレーションに基づいて,逆行列法による入力同定を行 ない,減衰の大きさと同定精度の関係について考察する.また,特異値分解によるノイズ
除去と
Tikhonovの正則化法による入力同定精度の改善について,そして減衰の大小と入力
同定精度との関係についても考察を行なう.
2.2 周波数応答関数の推定方法
[54][55]線形な系において,入力信号のフーリエスペクトルを
x(ω),出力信号のフーリエスペクトルを
y(ω),FRFを
h(ω)とすれば任意の周波数 ωにおいて入力と出力の間には次式の関係 が成り立つ.
( ) ( ) ( ) ω h ω x ω
y =
(2.1)ここで,入力信号と出力信号のフーリエスペクトル間に成り立つ線形関係の比例定数を表
すのが
h(ω)であり,FRFを推定することは入力信号と出力信号のフーリエスペクトルを実
験的に計測し,それらから比例定数
h(ω)を求めることである.従って,1回の加振試験を行 なって入力信号と出力信号を得たとすれば,次式から
FRFを推定できる.
( ) ( ) ( ) ω ω ω
x
h = y
(2.2)ここからは,任意の周波数
ωについて議論するため,式中の
ωは省略する.
実際には加振試験において何らかの計測誤差が混入することは避けられないので,それ らの誤差を除去する必要がある.そのためには,必ず複数回の加振を行ない,複数個から なる入力信号と出力信号の組み合わせを用いて
FRFを推定する.このとき,複数回の加振 によって得られる入力信号と出力信号の組み合わせから
hを推定するためには,一般的に
H1推定法を用いる.この方法は,加振試験で得られる入力信号と出力信号のうち出力信号 のみに計測誤差が含まれることを仮定しており,その計測誤差を最小化するようにして
FRFを推定する.本研究におけるアクセレランス推定時には
H1推定法を用いる.そこで
2.2.1項と
2.2.2項に,
1点加振における
FRF推定方法と多点加振における
FRF推定方法について 述べる.そして
2.2.3項には多点加振における系の線形性を評価する値として多重関連度関 数を定義し,2.2.4 項には同様に偏関連度関数を定義する.
2.2.1 H
1推定(1 点加振)
N
回の計測によって入力信号と出力信号を得たとする.出力信号のみに誤差が含まれたと すると,任意の周波数において以下の式が成り立つ.
( ) ( )
( ) ( )
( ) ( )
⎪
⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
⎪ =
⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
−
−
N N
N
x
x h y
y
M M
1 1
1
ε ε
(2.3)
ここで,出力信号に含まれる誤差の二乗和
( )2
1
∑
==
Ni
ε
iμ
(2.4)が最小になるような
hを求めるのが
H1推定である.
この最小二乗法を
x-y平面で模擬したのが図
2.1である.ここで,誤差は出力信号である 縦軸の
y方向のみに含まれることを仮定しているので,観測データ(x
(i), y(i))と直線y = hxと の
y方向の誤差
ε(i)の二乗和が最小となるような傾き
hを求めていることになる.
ここで式(2.3)を次にようにベクトル表記する.
x ε
y − = h
(2.5)このとき,最小二乗法により誤差
με
2μ =
(2.6)が最小になるような係数
hを決定することを
N次元空間で模擬したのが図
2.2である.
y y
x y = hx
0
ε
ここで誤差ベクトルε は入力ベクトル
xの定数倍
hxから出力ベクトル
yへと向かうベクト ルであるから,誤差||ε||
2を最小にするには
hxがベクトル
yから直線
xへおろした垂線の足 となるようにすればよい.これをベクトルの直交条件で示せば,
( − ) =
( x(i), y(i) ) ε(i)
θ
x2.2 N H1
x y
hx
図 推定における観測データと 直線 の関係
2.1 H1
y = h x
図 次元空間における 推定の
入力ベクトル と出力ベクトル の関係
が得られる.
線形系では入力ベクトル
xと出力ベクトル
yは本来線形関係に,すなわち幾何学的には 同一直線上にあるはずのものであるが,実際には測定誤差によりこの関係が成り立ってい ない.そこで,入力ベクトル
xと出力ベクトル
yの線形性の尺度を表すものとして,
N次元 空間における
2つのベクトルの余弦を考えると,
y x
y y x
x y x
H
H
= cos θ ⇔ cos θ =
(2.9)この余弦関数を利用して以下のようにコヒーレンス関数
γ2が定義される.
2 2 H 2 2 2
cos x y
y
= x
= θ
γ
(2.10)すなわちコヒーレンス関数
γ2については
(2.11)
1 0 ≤ γ
2≤
である.
2.2.2 H
1推定(多点同時加振)
加振点数を
m,計測回数をN(≥
m)とするとき,出力信号にのみ誤差が含まれることを仮定すると次式が成り立つ.
( ) ( )
⎣ ⎦
( ) ( )
⎣ ⎦ ⎪ ⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
⎥ ⎥
⎥
⎦
⎤
⎢ ⎢
⎢
⎣
⎡
⎪ =
⎭
⎪ ⎬
⎫
⎪ ⎩
⎪ ⎨
⎧
−
−
m N m N
m
N
N
h
h
x x
x x
y y
M L
M L M
1
1
1 1
1
) ( ) (
) 1 ( ) 1 (
, ,
, , ε
ε
(2.12)
ここで,測定回数
Nが加振点数
mに等しければ,式(2.12)は連立方程式となり,h を求める ことができるが,一般には測定回数
Nを加振点数
mよりも多くとることができるため,出 力信号に含まれる誤差の二乗和
∑
( )=
=
Ni i 1

![図 2.11 加振点 1 における同定結果 図 2.12 加振点 2 における同定結果 50100150200250300350400 450 50010-610-510-410-310-2Frequency [Hz]](https://thumb-ap.123doks.com/thumbv2/123deta/10131046.1964934/42.892.214.640.163.452/図211加振点1における同定結果図2加振点における同定結果Frequency.webp)
![図 2.13 アクセレランス行列の条件数 図 2.14 上:FRF の全二乗和,下:MIF 50100150200250300350400 450 500100101102103104Frequency [Hz]Condition Num](https://thumb-ap.123doks.com/thumbv2/123deta/10131046.1964934/43.892.217.652.159.795/図213アクセレランス行列の条件数図214上FRFの全二乗和下MIFFrequency.webp)
![図 2.15 加振点 2 の駆動点アクセレランス 2.5.3 Tikhonov の正則化法の適用 本項では Tikhonov の正則化法を用いることによる入力同定精度の向上について検討を行 なう.ただし,正則化パラメータは λ = 1.0x10 -2 と λ = 1.0 の 2 通りとする.図 2.17 に加振点 1 における同定結果を示し,表 2.1 には同定誤差の周波数平均値[N 2 /Hz]を示す.そして図 2.18図2.16 計測点1における実稼動加速度 -180180-90900](https://thumb-ap.123doks.com/thumbv2/123deta/10131046.1964934/44.892.204.647.150.791/加振点アクセレランス用いるによるについてパラメータにおける.webp)
![図 3.2 1 自由度系のアクセレランス -180180-90900Phase [deg.]010203040 5010-610-410-2100102Frequency [Hz]Gain [(m/s2)/N] -180180-90900Phase [deg.] 0 10 20 30 40 5010-2100102104Frequency [Hz]Gain [N/(m/s2)]図3.3 1自由度系の動質量 アクセレランスは加速度/力の次元をもつため単位は[(m/s 2 )/N]であり,動質量は力/加 速](https://thumb-ap.123doks.com/thumbv2/123deta/10131046.1964934/70.892.139.737.158.376/自由度系アクセレランスPhaseFrequencyPhaseFrequency自由度系動質アクセレランス加速.webp)
![図 3.7 2x3 動質量行列の 1,1 成分 図 3.8 2x3 動質量行列の 2,2 成分 -180180-90900Phase [deg.]0204060 80 10010-2100102104106Gain [N/(m/s2)]Frequency [Hz]SubmatrixPseudo-inverse-180180-90900Phase [deg.]02040608010010-2100102104106Gain [N/(m/s2)]Frequency [Hz]SubmatrixPseudo-](https://thumb-ap.123doks.com/thumbv2/123deta/10131046.1964934/73.892.220.657.163.460/図372x3動質量行列の11成分図382x3動質量行成分PhaseGainPhaseGain.webp)
