建物応答制御の高度化を目指した
振幅依存型パッシブ性能可変ダンパーに関する研究
Passive Dampers with Amplitude-Dependent Variable Performance Characteristics Toward Higher Performance
Structural Response Control for Buildings
2016 年 2 月
早稲田大学大学院 創造理工学研究科 建築学専攻 応答制御構造研究
欄木 龍大
Ryota MASEKI
建物応答制御の高度化を目指した振幅依存型パッシブ性能可変ダンパーに関する研究
目次
第1章 序 論
1.1 研究の背景と目的 ……… 1
1.2 既往の研究 ……… 3
1.2.1 複合制振ダンパーに関する研究 ……… 3
1.2.2 性能可変免震ダンパーに関する研究 ……… 4
1.3 本論文の構成 ……… 6
参考文献 ……… 7
第2章 風揺れの制御を対象とした粘弾性・弾塑性要素複合制振ダンパーの開発 2.1 はじめに ……… 10
2.2 粘弾性要素・弾塑性要素を複合した制振ダンパーの基本原理 ……… 12
2.2.1 複合制振ダンパーの構成 ……… 12
2.2.2 各構成要素の役割 ……… 14
2.3 動的加力試験による性能検証 ……… 15
2.3.1 実験概要 ……… 15
2.3.2 加振結果 ……… 19
2.3.3 加振結果より評価したダンパーの力学的性状 ……… 26
2.4 シミュレーション解析 ……… 31
2.4.1 解析モデル ……… 31
2.4.2 解析結果 ……… 34
2.5 本章のまとめ ……… 40
参考文献 ……… 41
第3章 粘弾性・弾塑性要素複合制振ダンパーを用いた実建物の振動試験による効果検証 3.1 はじめに ……… 42
3.2 実建物の振動実験による効果検証 ……… 43
3.2.1 建物概要 ……… 43
3.2.2 実験概要 ……… 46
3.2.3 実験結果 ……… 49
3.3 実験結果に基づく風応答性能評価 ……… 52
3.4 本章のまとめ ……… 53
参考文献 ……… 54
第4章 免震建物を対象としたパッシブ可変オイルダンパーの開発 4.1 はじめに ……… 55
4.2 バイフロー型パッシブ可変オイルダンパーの基本原理 ……… 56
4.2.1 作動原理 ……… 56
4.2.2 試験体概要 ……… 58
4.3 動的加力試験による性能検証 ……… 60
4.3.1 減衰係数固定時の特性評価試験 ……… 60
4.3.2 減衰係数切替時の特性評価試験 ……… 62
4.3.3 地震応答波加振試験 ……… 64
4.4 ユニフロー型パッシブ可変オイルダンパーの基本原理 ……… 66
4.4.1 作動原理 ……… 66
4.4.2 試験体概要 ……… 69
4.5 動的加力試験による性能検証 ……… 71
4.5.1 減衰係数固定時の特性評価試験 ……… 71
4.5.2 減衰係数切替時の特性評価試験 ……… 72
4.6 本章のまとめ ……… 73
参考文献 ……… 74
第5章 パッシブ可変オイルダンパーを用いた免震建物の動的解析による制御効果の検証 5.1 はじめに ……… 75
5.2 可変ダンパーを適用した免震建物応答性能の解析的検証 ……… 76
5.2.1 建物解析モデル ……… 76
5.2.2 入力地震動 ……… 77
5.2.3 パッシブ可変オイルダンパー ……… 81
5.2.4 最大応答値の比較 ……… 81
5.3 切替作動のバラツキが免震層のねじれ応答に及ぼす影響の検証……… 85
5.3.1 検討ケース ……… 85
5.3.2 解析結果 ……… 87
5.4 小ストローク免震への適用効果の解析的検証 ……… 97
5.4.1 建物解析モデル ……… 97
5.4.2 入力地震動 ……… 98
5.4.3 パッシブ可変オイルダンパー ……… 100
5.4.4 最大応答値の比較 ……… 100
5.5 本章のまとめ ……… 107
参考文献 ……… 108
第6章 結論 ……… 109 本論文に関わる研究業績 ……… 113 謝辞 ……… 116
1
第 1 章 序論
1.1 研究の背景と目的
本研究は,建物の応答制御の高度化を目的としたパッシブ型の性能可変ダンパーを提案 し,その有効性を明らかにすることを目的としている。阪神大震災以降,数多くの免震・
制振建物が建てられ,各種パッシブ型のダンパーが設置されてきた。しかし,これらのダ ンパーは,設計レベルの大地震動に対する検証は十分であっても,風揺れや中小地震,あ るいは設計の想定を超える大地震などの幅広い大きさの外乱に対して性能が十分であると は限らない。パッシブ型のダンパーでは,その性能が固定であるため,想定した設計レベ ルの外力に対しては最適に性能設定できても,実際の応答振幅に応じた最適な性能設定と はなっていないことが大きな理由である。
超高層建物や都市部のアスペクト比の大きな中高層建物では,地震や強風に対する建物 の制振を目的にさまざまな制振ダンパーが開発・実用化され適用されている。これらは変 位依存性の履歴系ダンパーと速度依存性の粘性系ダンパーに大別されるが,相異なった特 徴を有している。
履歴系ダンパーは安定した力学的特性を有し信頼性に優れることから,大地震の安全性 を高める目的で用いられている。しかし,履歴系ダンパーは小振幅の揺れに対するエネル ギー吸収効果を期待できないことから,風揺れや地震の後揺れに対する居住性を向上させ るためには,TMD等の制振ダンパーを別途設置する必要がある。
一方,粘性系ダンパーは,振幅の大きさに依らず広範なエネルギー吸収効果を発揮する ため,風揺れに対する居住性の向上から大地震の構造安全性の確保まで幅広い目的で利用 されている。しかし,粘性系ダンパーは,振動数依存性,温度依存性等の複雑な力学的特 性を有するものが多く,性能の設定が難しい。また,履歴系ダンパーに比べて性能/価格の 面からの経済性の問題もあって適用事例は限られている。また,粘性系ダンパーはユニバ ーサルジョイント等を介して構造物に取り付けられるため,ジョイントのガタや摩擦の影 響などで小振幅の揺れに対するエネルギー吸収性能が低下することも知られている。その ため,微小振幅から大振幅まで振幅に応じて広範なエネルギー吸収性能を持つ制振ダンパ ーの実現が望まれてきていた。
免震建物においても,免震層変位の制御を目的に,さまざまな免震ダンパーが開発・実 用化され適用されている。近年,内陸直下地震の発生確率の上昇が警告され,内陸直下地 震では大振幅のパルス性地震動の発生が危惧されている。また,2011 年の東日本大震災の 発生を受けて,南海トラフ沿いの海溝型巨大地震の想定震源域が見直され,さらには,海 溝型巨大地震では,大振幅で繰り返し回数の多い長周期・長時間の地震動の発生が危惧さ
2
れている。免震建物は想定以上の地震力が作用すると,免震層の変位が増大するという特 徴をもつため,このような設計の想定を大きく上回る地震動の作用によって,免震層の変 位が増大し,上部構造の被害,擁壁との衝突,免震装置の損傷などを生じさせる恐れがあ る。また,東日本大震災の発生を受けて,都市部などの狭小地においても免震ニーズが増 加しているものの,建築面積の関係から免震クリアランスを確保できず,免震建物を建て にくくしているという問題もあった。
このような問題は,免震層のダンパー量を増やして免震層変位を抑制することで改善で きるが,一般に免震層変位と上部構造の絶対加速度応答にはトレードオフ関係があるため,
パッシブ型ダンパー用いた従来の免震システムでは,大きな地震動を想定して免震層のダ ンパー量を設定すると,頻度の高い中小地震や通常の設計レベルの大地震に対する免震効 果が低下することが課題となっている。そのため,中小地震から設計の想定を超える大き な地震動まで対応可能な高度な免震技術が求められている。
一方,実際の応答振幅に応じて,ダンパーの性能を最適に設定可能な,電磁切替型のセ ミアクティブダンパーも提案され,事例は少ないものの実際の建物にも適用されている。
しかし,これらのセミアクティブダンパーは,大地震時には制御システムが動作しない事 を想定する必要があり,セミアクティブ免震の制御効果を実質的に設計に取り込むことが できなかった。また,センサーやコンピューターなどの制御システムや動作信頼性確保の ためのモニタリングシステムが必要となるなど,パッシブ型のダンパーを利用した制振・
免震システムと比較して,複雑で維持管理コストが高くなるという課題があった。
本研究は,上述のような建物の制振・免震に関する問題の解決を目指し,応答振幅に応 じて適切に性能を変化させる,実用的なパッシブ型の性能可変ダンパーを提案し,その有 効性を明らかにするものである。
3 1.2 既往の研究
1.2.1 複合制振ダンパーに関する研究
パッシブダンパーはその性格上,ある振幅をターゲットに定めたうえで最適な効果を上 げるように設計される。これを,微小振幅から大振幅まで広範なエネルギー吸収性能を持 たせるようにする方法として,強風時を想定した微小振幅の揺れに対して設計したダンパ ーと,地震時の大振幅の揺れに対して設計したダンパーを組み合わせることが考えられる。
本研究では,微小振幅の揺れから大地震時の大振幅の揺れまでの広範な振幅に対する効果 を目的に,微小振幅用と大振幅用のパッシブダンパーを組み合わせて構成した複合制振ダ ンパーを,振幅依存型パッシブ性能可変制振ダンパーの一つとして位置づける。
このような複合制振ダンパーの組み合わせには,粘性系ダンパーと履歴系ダンパーを並 列に接続する方法と直列に接続する方法がある。これらはいずれも,履歴系ダンパー降伏 前は粘性系ダンパーが,降伏後は履歴系ダンパーが主として振動エネルギーを吸収するこ とで,強風や中小地震等の微小振幅の揺れから大地震時の大振幅の揺れまで広範な振幅に 対する効果を期待している。
並列接続で 2 種類のダンパーを組み合わせた複合制振ダンパーとしては,時野谷・佐野 ら1)のせん断降伏型履歴ダンパーとオイルダンパーの組合せ,渡辺・鈴木ら2),3)の座屈拘束 ブレースと粘弾性ダンパーの組合せが報告されている。また,直列接続で 2 種類のダンパ ーを組み合わせた制振ダンパーとしては,寺本・笠井ら4)および曽田・鬼頭ら5)の粘弾性ダ ンパーと弾塑性ダンパーの組合せ,遠藤・笠井ら6)の粘弾性ダンパーと摩擦ダンパーの組合 せが報告されている。
しかし,並列接続された複合制振ダンパーでは,粘性系ダンパーに生じる変形が履歴系 ダンパーと同一となり,直列接続された複合制振ダンパーでは,粘性系ダンパーと履歴系 ダンパーに生じる力が同一となる。このような状況から,単純に組み合わせただけでは,
粘性系ダンパーを地震時の変形・力に対して性能設定せざるをえず,風揺れなどの小振幅 に対して最適な性能設定を行うことを難しくさせていた。
この問題を解決するために,並列接続の複合制振ダンパーにおいては,粘性系ダンパー に地震時に生じる変形を制限する機構を設けることが,また,直列接続の複合制振ダンパ ーにおいては,地震時に粘性系ダンパーに代わって履歴系ダンパーに力を伝達する機構を 設けることが必要となる。
山本・曽根ら 7),8)は,鋼材ダンパーと粘弾性ダンパーを直列接続で組み合わせた複合制 振ダンパーに対し,一定の変形までは力を生じず,ある変形を超えると剛になるストッパ ー材を粘弾性ダンパーに並列接合して,地震時に生じる粘弾性ダンパーの変形を数 mm程 度に制限することで,微小振幅の揺れに対して最適な粘弾性ダンパーの性能設定を実現し
4 ている。
また,後閑・笠井9)らも,摩擦ダンパーと粘弾性ダンパーの直列接続からなる複合制振ダ ンパーに対し,同様のストッパー材を用いることで,微小振幅の揺れに対して粘弾性ダン パーの効率化を図っている。
著者ら 10),11),12)は,座屈拘束ブレースと粘弾性ダンパーを並列接続で組み合わせた複合 制振ダンパーにおいて,粘弾性ダンパーと滑り機構を直列接合して,地震時に生じる粘弾 性ダンパーの変形を数mm以下に制限することで,小振幅の揺れに対して粘弾性ダンパー の高性能化を提案している。
以上,我が国の研究事例のみを挙げる結果となっているが,微小振幅から大振幅の揺れ まで広範な制振効果を有する複合制振ダンパーに関する研究は日本が先行しており,海外 での研究事例は見られないのが現状である。
1.2.2 性能可変免震ダンパーに関する研究
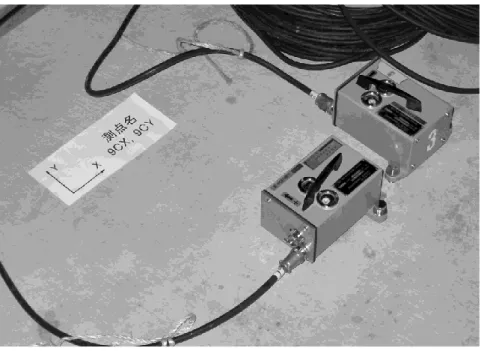
性能可変免震ダンパーとしては,電磁シャットオフ弁のON-OFFで減衰係数を切り替え る電磁切替型のセミアクティブオイルダンパーと,印加電圧を調整して減衰力を変化させ る磁気粘性流体ダンパー(MRダンパー)の二つが実用化されている。実施例はまだ少ない ものの,吉田ら13),および著者ら14),15)により,数棟のセミアクティブ免震建物に適用され ている。
また,吉田ら16),および長島・欄木ら17),により,建物の応答情報に基づいてセミアクテ ィブダンパーの減衰係数を調整し,免震層変位の抑制と上部構造の絶対加速度応答の低減 を実現する高度な制御則も提案されている。さらに,山本ら18),,岩田19),塩崎・曽田ら20), 長島・欄木ら21)および佐上・井上ら22)そして著者ら23)より,免震層やダンパーの応答情報 に基づいてセミアクティブダンパーの減衰力を適切に切り替える実用的な簡易制御則も提 案されている。
しかし,これらのセミアクティブダンパーを用いた免震システムには,センサーやコン ピューターなどの制御システムと,動作信頼性確保のためのモニタリングシステムが必要 となるため,パッシブダンパーのみを利用した免震システムと比較して,複雑で維持管理 コストが高くなるという課題もあって,普及するまでに至っていない。
一方,巨大地震の発生が危惧される現況においては,レベル 2 地震動を超える極大地震 までをも意識したダンパー量の設定も求められており,設計の想定内の地震に対する免震 性能を維持しつつ,設計の想定を超える極大地震に対しては,減衰性能を高めて免震層の 変位を抑制することが求められている24,25)。
このような背景から,電源を使わずに応答の大きさに応じて減衰性能を適切に切替可能
5
なパッシブ可変オイルダンパーの研究が行われている。パッシブ可変オイルダンパーは,
所定の変位を超えた場合に減衰性能が切り替わる変位感応型ダンパーと所定の速度を超え た場合に減衰性能が切り替わる速度感応型ダンパーに分類される。
飯場・皆川ら26),27)は,戸建て住宅用の小型の速度感応型可変ダンパーを提案し,実大試 験体による性能試験を実施している。また,高橋・福和ら 28)は,速度感応型可変オイルダ ンパーを戸建て免震住宅に適用し,実大振動台試験によって可変オイルダンパーの免震層 変形抑制効果を検証している。
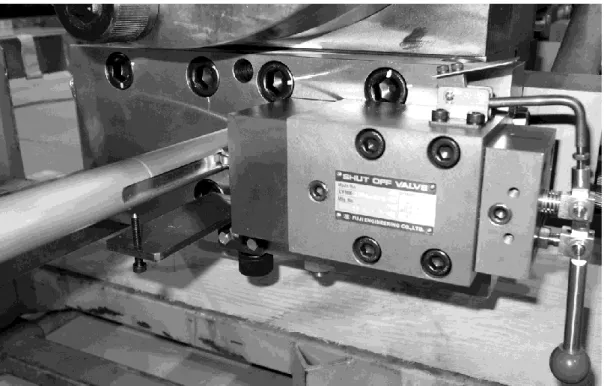
一方,田部井・井上ら 29)は,ダンパー外部に設置した小型オイルシリンダーを所定変位 で作動させて,その油圧を用いて回路を切り替える変位感応型可変オイルダンパーを提案 している。両ロッドタイプ(ユニフロー型)は材長が長く設置スペースの確保など使用上 の制約があることから,実用的な片ロッドタイプ(ユニフロー型)も提案されている 30)。 著者ら31),32)も,変位検出ロッドを用いてバネ駆動式のシャットオフ弁を作動させて減衰係 数を切り替える,ユニフロー型とバイフロー型の可変オイルダンパーを提案している。
また,安田・露木ら 33)は,従来のパッシブオイルダンパーとギャップ要素とを直列接合 して,所定の変形を超えた場合にのみオイルダンパーが建物に接続されて減衰力を高める システムを提案している。
海外においても,以前から断層近傍のパルス性地震動によって,免震建物に過大な変形 を生じる可能性が指摘されており34)~35),設計の想定内の地震に対する免震性能を維持しつ つ,設計の想定を超える極大地震では,減衰性能を高めて変位を抑制可能な性能可変免震 システムが検討されている36)~38)。
履歴ダンパー或いは粘性ダンパーをギャップ要素と直列に組み合わせることで,免震層 の変位に応じて減衰力を段階的に変化させる免震システムの有効性が,Zargarらの研究で示 されている39)。
以上,免震建物用の性能可変ダンパーは実建物での適用例はまだ少ないものの,国内・
海外において,研究開発が盛んに実施されている状況にある。
6 1.3 本論文の構成
本論文は,以下に述べる全6章から構成されている。
第 1 章は序論であり,本研究の背景および目的を述べ,関連する既往の研究を整理して いる。
第2章「風揺れの制御を対象とした粘弾性・弾塑性要素複合制振ダンパーの開発」では,
粘弾性ダンパーと座屈拘束ブレースを並列に組み合わせる複合制振ダンパーの高性能化を 提案する。この複合制振ダンパーは,粘弾性ダンパーに生じる変形を滑り機構を用いて制 限することで,風揺れを対象とした微小振幅振動に対する粘弾性ダンパーの高性能化を可 能とするものである。実大試験体を用いた動的加力試験に基づき,微小振幅から大振幅に わたるエネルギー吸収性能を検証することで,広範な振幅レベルに対する本ダンパーの有 効性を示す。
第 3 章「粘弾性・弾塑性要素複合制振ダンパーを用いた実建物の振動試験による効果検 証」では,複合制振ダンパーを適用した 9 層鉄骨造建物において人力加振試験を実施し,
風揺れに対する居住性評価として 1 年再現期待値にあたる風速レベルの微小振幅に対する ダンパーの動作性と制振効果を検証する。
第 4 章「免震建物を対象としたパッシブ可変オイルダンパーの開発」では,ユニフロー 型とバイフロー型のオイルダンパーに対して,それぞれ,機械式の切替回路を有する新た な変位感応型のパッシブ可変オイルダンパーを提案する。両方式のダンパーについて,実 大試験体の動的加力試験結果に基づき,ダンパーの基本特性と性能切替時の作動性能を評 価する。
第 5 章「パッシブ可変オイルダンパーを用いた免震建物の動的解析による制御効果の検 証」では,クリアランス500mmの免震建物に,4章提案のパッシブ可変オイルダンパーを 適用したモデルを想定して地震応答解析を実施し,中小地震に対する加速度低減効果と通 常の設計レベルを超える巨大地震に対する変位抑制効果を示す。さらに,免震クリアラン スを十分に確保することが困難な都市部狭小敷地の免震建物を想定して,クリアランス
200mmの免震建物モデルに対する地震応答解析をあわせて実施し,提案するダンパーの高
い有効性を示す。
パッシブ可変オイルダンパーを用いたシステムにおいては,各ダンパーの減衰係数が免 震層の変位に応じて個別に切り替わるため,そのタイミングにズレが生じる。免震層の偏 心,ダンパーの切替変位の違いなどによる切替作動のばらつきが免震層の変位応答に及ぼ す影響について,建物両端部にダンパーを配した条件的に不利な厳しい状況を想定した検 証を実施し,免震層のねじれ応答に及ぼす影響を評価する。
第6章「結論」では,本研究論文の各章の結論を総括的に述べる。
7 参考文献
1) 時野谷浩良,佐野剛志,鈴木康正,勘坂幸弘,高橋泰彦,八木貞樹:せん断降伏型履歴 ダンパーとオイルダンパーを並列設置した架構の動的実験(その1)実験計画と結果 概要,日本建築学会大会学術講演梗概集 C-1,pp.873-874,1999.9
2) 渡辺厚,佐伯英一郎,鈴木一弁:弾塑性体と粘弾性体を一体化した制振ダンパーの実験 的研究,日本建築学会大会学術講演梗概集 B-2,pp.1021-1022,1999.9
3) 鈴木一弁,中村博志,渡辺厚,竹内徹:座屈拘束ブレースに粘弾性体を並列付加した制 振ダンパーの特性に関する研究 その1~2,日本建築学会大会学術講演梗概集 C-1,
pp.569-570,2002.8
4) 寺本道彦,笠井和彦,槙島健太郎:粘弾性・弾塑性体直列結合ダンパーの制振効果に関 する研究 その1~2,日本建築学会大会学術講演梗概集 B-2,pp.975-978,1999.9 5) 曽田五月也,鬼頭憲司,橋本昭夫,佐田貴浩:鉄鋼系工業化住宅における制振システム
に関する研究 その1~2,日本建築学会大会学術講演梗概集 B-2,pp.377-380,2001.9 6) 遠藤文明,笠井和彦,橋本康則,佐野剛志,後閑章吉,貞末和史:粘弾性体と摩擦ダン
パー(ブレーキダンパー)の直列接続からなる制振装置 その 1~4,日本建築学会大 会学術講演梗概集 B-2,pp.963-970,2005.9
7) 山本雅史,曽根孝行:広範囲の振幅領域に効果を発揮する粘弾性-鋼材直列型ダンパー
の開発 その1~2,日本建築学会大会学術講演梗概集 B-2,pp.167-170,2004.9
8) 山本雅史:広範囲の振幅領域に効果を発揮する粘弾性-鋼材直列型ダンパーの開発(そ
の 3)間柱型ダンパーの動的加力実験結果,日本建築学会大会学術講演梗概集 B-2,
pp.973-974,2005.9
9) 後閑章吉,遠藤文明,石川理都子,佐野剛志,笠井和彦:粘弾性体と摩擦ダンパー(ブ
レーキダンパー)の直列接合からなる制振装置(その5)制振装置の改善,日本建築 学会大会学術講演梗概集 B-2,pp.767-768,2006.9
10) 木村雄一,一色裕二,成原弘之,辻田修,欄木龍大,高山正春:弾塑性・粘弾性複合ダ ンパーの開発 その1~3,日本建築学会大会学術講演梗概集 B-2,pp.759-764,2002.8 11) 木村雄一,成原弘之,欄木龍大,一色裕二:弾塑性・粘弾性複合ダンパーの開発 その
4~5,日本建築学会大会学術講演梗概集 B-2,pp.829-832,2003.7
12) 欄木龍大・成原弘之・木村雄一・一色裕二:粘弾性ダンパー要素と座屈拘束ブレース要 素を並列接続した複合ダンパーの性能に関する実験的研究,構造工学論文集,Vol.57B,
pp.271-278, 2011.3
13) 吉田和夫:世界初のセミアクティブ免震ビル,日本機械学会誌,Vol.104,No.995,
pp.48-52,2001.10
8
14) 篠崎洋三,藤山淳司,長島一郎,欄木龍大他:可変剛性セミアクティブ免震システムの 開発と適用,その1~6,日本建築学会大会学術講演梗概集 B-2,pp.723-734,2005.9 15) 篠崎洋三,細澤治,藤山淳司,長島一郎,欄木龍大:連層耐震壁を有する超高層免震建
物の設計,その1~2,日本建築学会大会学術講演梗概集 B-2,pp.327-330,2008.9 16) 吉田和夫,藤尾忠洋:双線形最適制御理論とセミアクティブ免震への応用,日本機械学
会論文集,67巻656号,pp.96-102,2001.4
17) 長島一郎,篠崎洋三,欄木龍大,讃井洋一,北川良和:可変減衰オイルダンパーを用い た免震構造物のスライディングモード制御,日本建築学会構造系論文集,第 649 号,
pp.511-519,2010.3
18) 山本雅史,東野雅彦,吉田健一,木林長仁,平野範彰:マスダンパーおよび免震構造に おける変形制御を目的としたオイルダンパーの有効利用に関する研究,日本建築学会 大会学術講演梗概集 B-2,pp.651-652,2002.8
19) 岩田範生:MRダンパー用簡易セミアクティブ制御手法に関する研究,日本建築学会構 造系論文集,第559号,pp.71-78,2002.9
20) 塩崎洋一,樋渡建,藤谷秀雄,曽田五月也:MRダンパーを用いた免震構造物の簡易な セミアクティブ制御に関する研究,日本建築学会構造系論文集,第570号,pp.37-43,
2003.8
21) 長島一郎,欄木龍大,日比野浩,高木政美:可変減衰オイルダンパーを用いた免震シス テムの変位抑止制御,日本建築学会構造系論文集,第577号,pp.37-45,2004.3 22) 佐上遥子,堀則夫,井上範夫:磁気粘性流体ダンパーを用いた免震構造物の応答制御手
法の検討及び提案,日本建築学会構造系論文集,第627号,pp.709-716,2008.5 23) 欄木龍大,長島一郎,勝田庄二,木村雄一,西本信哉:可変減衰ダンパーを利用した小
ストローク免震の応答性能,トリガー方式を利用した簡易セミアクティブ,日本建築 学会大会学術講演梗概集 B-2,pp.1013-1014,2007.8
24) 宮崎光生,水江正:震源近傍の地震動に対して免震構造物は対応可能か?,第28回地 盤震動シンポジウム,日本建築学会,pp.119-136,2000
25) 多賀謙蔵,林康裕,小倉正恒他:上町断層帯地震に対する設計用地震動ならびに設計法 に関する研究,その8~9,日本建築学会大会学術講演梗概集,B-2,pp.551-554,2011.7 26) 飯場正紀,花井勉,皆川隆之,飯田秀年:次世代ダンパーを用いた長周期地震動対応戸
建て免震システム,その 1~2,日本建築学会大会学術講演梗概集 B-2,pp.321-324,
2010.9
27) 皆川隆之,花井勉,飯場正紀,中田信治:次世代ダンパーを用いた長周期地震動対応戸 建て免震システム,その 3 性能可変ダンパーの実用化実験,日本建築学会大会学術講
9 演梗概集 B-2,pp.467-468,2011.8
28) 高橋武広,天埜貴仁,福和伸夫:実大振動台実験に基づく戸建免震住宅の免震層変形抑 制に関する研究,日本建築学会構造系論文集,第699号,pp.565-574,2014.5 29) 田部井直哉,堀則男,井上範夫:性能可変オイルダンパーの開発および免震構造物への
適用性,日本建築学会構造系論文集,第636号,pp.259-266,2009.2
30) 渡辺真司,三木広志,根本真孝,池永昌容,五十子幸樹,井上範夫:ユニフロー式性能 可変オイルダンパーの開発とその応答性状に関する実験的検討,その 1~2,日本建築 学会大会学術講演梗概集 B-2,pp.457-460,2011.8
31) 欄木龍大,長島一郎,新居藍子,木村雄一:パッシブ型可変オイルダンパーの開発と小 ストローク免震構造物への適用性,構造工学論文集,B-58B,pp.225-230,2012.3 32) 欄木龍大・長島一郎・新居藍子・木村雄一・西谷章:バイフロー式パッシブ可変オイル
ダンパーの開発とそれを用いた免震構造物の応答制御,日本建築学会構造系論文集,
No.80,Vol.713,pp.1023-1032,2015.7
33) 安田拓矢,露木保男,築谷朋也,鈴木和廣,森高英夫,村尾秀己,福和伸夫:免震ダン パー接続型付加減衰機構の開発,日本建築学会大会学術講演梗概集,B-2,pp.275-278,
2012.9
34) T.H. Heaton, J.F. Hall,D.J. Wald and M.W. Halling : Response of high-rise and base-isolated buildings in a hypothetical MW7.0 blind thrust earthquake. Science 267, pp.206-211, 1995.
35) J.F. Hall, T.H. Heaton,M.W. Halling and D.J. Wald : Near-Source Ground Motion and its Effects on Flexible Buildings. Earthquake Spectra, 11, No.4, pp.569-605, 1995.
36) Panchal VR, Jangid RS : Variable friction pendulum system for near-fault ground motions.
Struct. Control and Health Monitoring, Vol.15, No.4 pp.568-584, 2008.
37) J.F. Hall, T.H. Heaton,M.W. Halling and D.J. Wald : Near-Source Ground Motion and its Effects on Flexible Buildings. Earthquake Spectra, 11, No.4, pp.569-605, 1995.
38) H. Zargar, K.L. Ryan, T. Rawlinson and J.D. Marshall : Exploring the Gap Damper Concept to Control Seismic Isolation Displacement Demands. 15th WCEE, DVD, 2012.
39) H. Zargar, K.L. Ryan and J.D. Marshall : Feasibility study of a gap damper to control seismic isolator displacements in extreme earthquakes. Struct. Control and Health Monitoring, Vol.20, No.8 pp.1159-1175, 2013.
10
第 2 章 風揺れの制御を対象とした粘弾性・弾塑性要素複合制振ダ ンパーの開発
2.1 はじめに
序論でも述べたように,地震や強風に対する建物の応答低減のため,多くの種類の制振 ダンパーが実用化され適用されている。これらは変位依存性の履歴系ダンパーと速度依存 性の粘性系ダンパーに大別でき,それぞれの特徴を活かした利用がなされている1)。
履歴系ダンパーは安定した力学的特性を有し,性能/価格の面からの経済性も良いことか ら,大地震に対する建物の安全性を向上させる目的で利用されている。しかし,履歴系ダ ンパーについては小振幅の揺れに対するエネルギー吸収効果を期待できないことから,超 高層建物や都市部のアスペクト比が大きな中高層建物では,強風や中小地震における居住 性向上を目的として,ATMD や TMD など微小振幅の揺れの低減を対象とする制振装置と組み 合わせて適用されることが多い。
一方,粘性系ダンパーは,振幅の大きさに依らず広範なエネルギー吸収効果を期待でき る。しかし,地震時の大振幅の揺れを対象とするダンパーでは,再現期間 1 年の強風時に 生じる微小振幅の揺れに対するエネルギー吸収性能が十分でないものが多い2)。
この問題に対して,近年,微小振幅用の粘弾性ダンパーと大振幅用の履歴系ダンパーを 組み合わせた複合制振ダンパーの開発が行われている 3)~6)。本論文では,微小振幅用と大 振幅用のパッシブダンパーを組み合わせて構成した複合制振ダンパーを,振幅依存型パッ シブ性能可変制振ダンパーの一つとして位置づける。
これらの複合制振ダンパーの実用化においては,微小振幅の揺れに対する粘弾性ダンパ ーの更なる高性能化が求められている。粘弾性ダンパーの減衰性能は,粘弾性体の貼り付 け面積に比例し,厚みに反比例するため,厚みを薄く設定することで,少ない貼り付け面 積でも高い減衰性能を得ることが可能である。しかし,厚みを薄くすると粘弾性ダンパー の変形能力が低下してしまうため,大振幅の揺れが生じた際には,粘弾性ダンパーに代わ って履歴系ダンパーに力を伝達するストッパー機構を組み込んだ直列接続タイプの複合制 振ダンパーが開発されている7)~9)。
本章では,粘弾性ダンパーと座屈拘束ブレースの並列接続タイプの複合制振ダンパーを 対象に,粘弾性ダンパーに生じる変形を滑り機構を用いて制限することで,風揺れを対象 とした微小振幅振動に対する粘弾性ダンパーの高性能化を実現する複合制振ダンパーを提 案する。最大減衰力800kNの実大試験体を用いた動的加力試験を行って,微小振幅から大 振幅にわたるエネルギー吸収性能を検証する。また,粘弾性ダンパーの振動数依存特性を
11
考慮できる 6 要素モデルを含む簡単な力学モデルを構築して実験結果を再現し,モデル化 の妥当性を検証する。
12
2.2 粘弾性要素・弾塑性要素を複合した制振ダンパーの基本原理 2.2.1 複合制振ダンパーの構成
図 2.1 に複合ダンパーの全体外観を,図 2.2 にその力学モデルを示す。粘弾性ダンパー および滑り機構が座屈拘束ブレースの補剛鋼管と直列接合され,さらに座屈拘束ブレース
(鋼材ダンパー)がこれと並列接続される構成としている。各部を以下に説明する。
(1) 鋼材ダンパー
鋼材ダンパーには既往の座屈拘束ブレース 10)を採用する。この座屈拘束ブレースは十字 断面の鋼材を芯材とするブレースの周りを適切な隙間を設けて束ねられた 4 本の角形鋼管 が座屈補剛材として囲んでおり,圧縮時引張時とも安定した塑性変形能力を有する。既往 の座屈拘束ブレースは,軸材と座屈補剛材は互いに滑動可能であり座屈補剛材には軸力は 生じないが,複合制振ダンパーでは,図 2.1 に示すように,座屈拘束ブレースの左端側で ブレース軸材と座屈補剛材を高力ボルトで接合することによって,両者間の相対変位を主 に図中の右端側に生じさせ,その相対変位を粘弾性ダンパーに付与する仕組みにしている。
(2) 粘弾性ダンパー
粘弾性ダンパーはフランジ付きの外殻と 3 枚の内部鋼板とが 4 枚の粘弾性体を挟んで積 層構造をなしたものである。粘弾性ダンパーの貯蔵剛性Kdおよび損失剛性Kd’’は,式 2.1 に示すようにS/d(S:粘弾性体の貼付面積,d:粘弾性体の厚さ)に比例するため,粘弾性 体の厚さdが薄いほどダンパーの減衰性能が高まる。一方,粘弾性体は厚さd の 5 倍程度 のせん断変形が生じると破断する。このため,地震時の大振幅の揺れに対して 30~40mm 程 度の変形性能を確保するために,一般の粘弾性ダンパーでは最低でも 10mm 程度の厚さdが 必要とされている。
d G S d K
d G S Kd
m m
……… (2.1)
ここに,
G
m(kN/mm2) : 粘弾性ダンパーの貯蔵弾性率G
m
(kN/mm2) : 粘弾性ダンパーの損失弾性率 S (mm2) :粘弾性体の貼付面積d (mm) :粘弾性体の厚さ
13
そこで今回は,粘弾性体の厚さd を従来の粘弾性ダンパーの約 1/5 の厚さとなる 2mm ま で薄くすることで,微小振幅の揺れに対する粘弾性ダンパーの高性能化を図った。図 2.3 に 粘弾性ダンパーの写真を示す。粘弾性ダンパーには,振幅依存性が小さいアクリル系
(ISD111)とジエン系(SDM1)の粘弾性体を採用する。粘弾性ダンパー2 体を一組として座 屈拘束ブレースの上下両側面に抱かせ,粘弾性ダンパー外殻のフランジの一方を座屈補剛 材に接合し,粘弾性ダンパーの内部鋼板を座屈拘束ブレースの軸材の端部継手部分に接合 する。
(3) 滑り機構
上記継手部は,中板にスロット孔をあけた高力ボルトによる二面せん断の摩擦接合をな し,所定の荷重で滑るように設定される。添え板と中板の間の摩擦面にはモールド系摩擦 材とステンレス板(SUS304)を挟んでいる。
図 2.1 複合制振ダンパーの構成
図 2.2 複合制振ダンパーの力学モデル
ブレース軸材 座屈補剛材
粘弾性ダンパー 滑り機構
粘弾性ダンパー 滑り機構
軸材と座屈補剛材を接合
K0
C0
K1 C1
K2 C2
Kh Kp
Kb
滑り機構(剛塑性)
粘弾性ダンパー(6要素モデル)
座屈補剛材(弾性)
座屈拘束ブレース(バイリニア)
ダンパー部
ブレース部
14
(a) アクリル系(ISD111) (b) ジエン系(SDM1)
図 2.3 粘弾性ダンパー
2.2.2 各構成要素の役割
複合制振ダンパーの各構成要素の役割を要約すると次のようになる。
(1) 鋼材ダンパー
建物の構造安全性に関わる地震時の大振幅の応答に対しては,座屈拘束ブレース軸材の 塑性変形にもとづく履歴減衰でエネルギーを消費し,建物の変位応答を低減して損傷を最 小限に抑える。
(2) 粘弾性ダンパー
強風時の風振動や中小地震時の後揺れのように,座屈拘束ブレースが弾性範囲に留まる ような比較的頻度の高い微小振幅の応答に対しては,粘弾性ダンパーの粘性減衰でエネル ギーを消費し,建物の加速度応答を低減して居住性を改善する。
(3) 滑り機構
比較的大振幅の応答に対しては滑り機構が滑るので,これと直列接合された粘弾性ダン パーに発生する力やひずみが制限される。これにより,粘弾性ダンパーやその接合部など の損傷や破壊を防止する。また,滑り機構の摩擦力は,鋼材ダンパーの復元力に付加され る。
15 2.3 動的加力試験による性能検証
2.3.1 実験概要
実部材としての性能を確認するため,複合制振ダンパーの実大試験体を用いて微小変形 から大変形にわたる動的加力実験(弾性~弾塑性加振)を行った。
(1) 試験体
図 2.4 および図 2.5 に試験体形状を示す。座屈拘束ブレースの十字断面は,十-80×80×
12(SN400B)で,降伏区間の長さは 2,720mm である。鋼材の引張試験結果によると,降伏点 は 283N/mm2,引張強さは 447N/mm2,伸びは 30.4%である。また,ブレース軸材の軸降伏変形 は 3.7mm,降伏軸力は 503kN である。粘弾性ダンパーは,ジエン系 2 体とアクリル系 2 体を 各 1 組ずつ用い,計 2 体の複合制振ダンパー試験体を製作した。
粘弾性ダンパーの形状は幅 140mm×長さ 1,000mm×厚さ 2mm の4層で,複合制振ダンパー
1 体でS/d = 560m を実現した。また,滑り機構の高力ボルト( F10T-2×M20 )には,標準ボル
ト張力の 50%の軸力( 89kN×2=178kN )を導入した。摩擦材の面圧は約 10MPa で,摩擦係 数は約 0.2 である。中板のスロット孔長さは 100mm で,滑動可能変位は±40mm である。図 2.7 に試験体の外観写真を,図 2.8 に粘弾性ダンパーと滑り機構部の写真を示す。
(2) 加力装置
図 2.8 に加力装置を示す。試験体を基礎梁と加力用柱の間にブレース状に斜めに設置し,
動的アクチュエータ(最大荷重±1MN,最大変位±200mm,最大速度 220mm/s)を用いて柱頭 部を水平に載荷した。制御変位はブレース両側継手間(3,800mm)の変位とした。
(3) 計測項目
複合制振ダンパー各部の荷重-変形関係を評価するための計測を実施した。変形に関して は,試験体の全体変形(図 2.8 に測定区間を表示),粘弾性ダンパーおよび滑り機構の変形 を計測した。荷重に関しては,ブレース軸材の弾性区間(拡幅部)に歪みゲージを貼付し てブレース部の荷重を計測した。
また,座屈補剛材,粘弾性ダンパーおよび滑り機構の直列接合部(以後,図中ではダン パー部と表記)の荷重Fdは,式 2.2 を用いてアクチュエータの荷重計より幾何学的に算出 した複合制振ダンパーの全体荷重Ft から,ブレース部荷重Fb の計測値を差し引いて評価 した。また,粘弾性体の温度,滑り機構のボルト張力も計測した。
16
Fb Ft Fd
F
Ft
30 cos 1
……… (2.2)
ここに,
F : アクチュエータの荷重 Fb: ブレース部の荷重
図 2.4 複合制振ダンパー試験体(単位:mm)
(a) ブレース部断面 (b) 粘弾性ダンパー断面 (c)滑り機構断面
図 2.5 複合ダンパー試験体各部の断面図(単位:mm)
264
360 2720 180
180
360 (ブレース降伏区間)
4□-100×100×6(STKR400)
粘弾性ダンパー
240
SUS304 PL-5 PL-16(SM490A)
継手部分
添え板を表示せず
拡幅部(ゲージ貼付位置) 添え板
,
PL-6
(STKR400)
十-80×80×12(SN400B)
□-100×100×6 軸材
(SS400)
PL-2.5×50×350
(SUS304)
添え板 PL-12
座金
PL-16×100×100 摩擦材 PL-4.5
-150×50×4.5
ジエン系 :幅140mm×長さ1000mm アクリル系:幅130mm×長さ980mm
(蓋板)
粘弾性体 厚さ2mm×4層 3PLs-9
(中板)
厚さ2×4層 幅140×長さ1000mm
17
図 2.6 試験体の外観
図 2.7 粘弾性ダンパーと滑り機構部の外観
18
図 2.8 加力装置(単位:mm)
4) 試験ケース
種々の振幅の正弦波による定常加振および,風応答・地震応答解析波形を用いたプログ ラム加振を行った。表 2.1 に正弦波加振の試験条件一覧を,表 2.2 に応答波加振の試験条 件一覧を示す。地上 30 階建ての鉄骨造(固有周期 4 秒)を想定した多質点系の線形モデル に対して,八戸波(1968 Hachinohe NS)と荷重指針の風力スペクトルに適合した模擬風力 波を入力して算出した 2 層部分の層間変形波形を応答波として用いた。
八戸応答波については,最大振幅を 2mm,10mm および 30mm に,風応答波については,最 大振幅を 0.2mm,0.4mm,0.6mm に基準化して加振を行った。
4677
2700500 3503002050
700
動 的 ア ク チ ュ エ ー タ ( 1MN )
Shape Up Brace
粘 弾 性 ダ ン パ滑 り 機 構 800
3800
30° 800
4677
2700500 3503002050
700
動 的 ア ク チ ュ エ ー タ ( 1MN )
Shape Up Brace
粘 弾 性 ダ ン パ滑 り 機 構 800
3800
30° 800
座屈拘束ブレース 全体変形測定区間
F
, ,
, ,
19
表 2.1 正弦波加振の試験条件一覧
表 2.2 応答波加振の試験条件一覧
2.3.2 加振結果 (1) 弾性加振
図 2.9 にジエン系粘弾性ダンパーを用いた複合制振ダンパー試験体に対する正弦波加振
(最大振幅 0.2mm,加振振動数 0.33Hz)の履歴曲線を示す。また,図 2.10 にアクリル系粘 弾性ダンパーを用いた複合制振ダンパーに対する風応答波加振(固有周期 4 秒の建物モデ ルに対する模擬風力応答波,最大振幅 0.6mm)の履歴曲線を示す。荷重-変形関係は,複合 制振ダンパー全体と,荷重をダンパー部とブレース部で分離したものを示す。
また,図 2.11 に風応答波加振時の荷重,変形,粘弾性体温度の時刻歴波形を示す。日常 的な風揺れを対象とした微小振幅加振のため,ブレース軸材は弾性範囲に留まり,滑り機 構もすべり発生前となっている。ダンパー部が線形粘弾性体特有の楕円ループを描くため,
最大振幅 0.6mm(粘弾性体歪み 30%)の微小変形に対しても,複合ダンパーは安定した履歴 ループを描いていることが確認できる。
また,時刻歴波形より,試験体両端に生じる相対変形は,座屈補剛材が十分に剛である ため,粘弾性体に集中していることがわかる。加振による粘弾性体の温度変化は無視でき るくらい小さい。
加振波
±0.1mm ±0.2mm ±0.4mm ±0.6mm ±1mm ±2mm ±10mm ±30mm
○ ○ ○ ○ ○ ○ ○ ○
弾性加振の最大振幅 弾塑性加振の最大振幅
正弦波 0.33Hz
加振波
±0.1mm ±0.2mm ±0.4mm ±0.6mm ±1mm ±2mm ±10mm ±30mm
風応答波 ○ ○ ○
地震応答波 ○ ○ ○
弾性加振の最大振幅 弾塑性加振の最大振幅
20
(a)複合制振ダンパー全体の荷重変形関係 (b)ダンパー・ブレース各部の荷重変形関係
図 2.9 正弦波 0.33Hz・振幅 0.2mm 加振による履歴曲線(ジエン系試験体)
(a)複合制振ダンパー全体の荷重変形関係 (b)ダンパー・ブレース各部の荷重変形関係
図 2.10 最大振幅 0.6mm の風応答加振による履歴曲線(アクリル系試験体)
-60 -40 -20 0 20 40 60
-0.3 -0.2 -0.1 0 0.1 0.2 0.3
荷重(kN)
変形 (mm)
全体荷重-全体変形
気温23℃
室温23℃
-120 -80 -40 0 40 80 120
-0.8 -0.4 0 0.4 0.8
荷重(kN)
変形 (mm)
全体荷重-全体変形
気温19℃
室温19℃
-60 -40 -20 0 20 40 60
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 ダンパー部 ブレース部
荷重(kN)
変形 (mm)
各部荷重-全体変形
-120 -80 -40 0 40 80 120
-0.8 -0.4 0 0.4 0.8 ダンパー部 ブレース部
荷重(kN)
変形 (mm)
各部荷重-全体変形
21
(a)各部荷重の時刻歴波形
(b)各部変位の時刻歴波形
(c)粘弾性体温度の時刻歴波形
図 2.11 最大振幅 0.6mm の風応答加振による時刻歴波形(アクリル系試験体)
-100 -50 0 50 100
0 50 100 150 200 250 300 350
全体
ブレース部
ダンパー部荷重(kN)
時間 (s)
-0.6 -0.4 -0.2 0 0.2 0.4 0.6
0 50 100 150 200 250 300 350
全体
粘弾性体
滑り機構変位(mm)
時間 (s)
19 19.2 19.4 19.6 19.8 20
0 50 100 150 200 250 300 350
粘弾性体
温度 (℃)
時間 (s)
22 (2) 弾塑性加振
図 2.12 にジエン系の複合制振ダンパー試験体に対する正弦波加振(最大振幅 30mm,加振 振動数 0.33Hz)の結果を示す。また,図 2.13 および図 2.14 にアクリル系の複合制振ダン パー試験体に対する八戸応答波加振(固有周期4秒の建物モデルの応答波,最大振幅 30mm)
の結果を示す。
荷重-変形関係については,複合制振ダンパー全体,荷重をダンパー部とブレース部に分 離したものと,ダンパー部の変形を粘弾性ダンパーと滑り機構に分離したものを示す。時 刻歴波形については,荷重,変形,滑り機構のボルト軸力および粘弾性体温度を示す。
地震を対象とした大振幅加振のため,ブレース部は鋼材系履歴ダンパーとしての安定し た紡錘形履歴を描いている。また,ダンパー部は滑り機構にすべりが生じて弾塑性型の履 歴を示している。ダンパー部の荷重は滑り荷重により制限されるため,粘弾性体の最大ひ ずみは 250%(変形 5mm)に抑制されており,限界ひずみ 500%(変形 10mm)に対して十分に 余裕がある。
加振により粘弾性体温度は 0.5℃上昇したが,ボルト軸力はほとんど変動が無かった。な お,摩擦材とステンレス板との馴染みの影響により,摩擦係数が累積滑り量の増加と共に 大きくなる性質を持つため11),滑り荷重の若干の増加が見られる。
23
(a)複合制振ダンパー全体の荷重変形関係
(b)ダンパー・ブレース各部の荷重変形関係 (c)粘弾性体・滑り機構の荷重変形関係
図 2.12 正弦波 0.33Hz・振幅 30mm 加振による履歴曲線(ジエン系試験体)
-1200 -800 -400 0 400 800 1200
-60 -40 -20 0 20 40 60
荷重(kN)
変形 (mm)
全体荷重-全体変形
気温24℃
室温19℃
-1200 -800 -400 0 400 800 1200
-60 -40 -20 0 20 40 60 ダンパー部
ブレース部荷重(kN)
変形 (mm) 各部荷重-全体変形
-400 -300 -200 -100 0 100 200 300 400
-60 -40 -20 0 20 40 60 粘弾性体
滑り機構荷重(kN)
変形 (mm)
ダンパー部荷重-変形
24
(a)複合制振ダンパー全体の荷重変形関係
(b)ダンパー・ブレース各部の荷重変形関係 (c)粘弾性体・滑り機構の荷重変形関係
図 2.13 最大振幅 30mm の八戸応答波加振による履歴曲線(アクリル系試験体)
-1200 -800 -400 0 400 800 1200
-40 -30 -20 -10 0 10 20 30 40
荷重(kN)
変形 (mm)
全体荷重-全体変形
気温23℃
室温23℃
-1200 -800 -400 0 400 800 1200
-40 -30 -20 -10 0 10 20 30 40 ダンパー部
ブレース部荷重(kN)
変形 (mm) 各部荷重-全体変形
-400 -300 -200 -100 0 100 200 300 400
-40 -30 -20 -10 0 10 20 30 40 粘弾性体
滑り機構荷重(kN)
変形 (mm)
ダンパー部荷重-変形
25
(a)各部荷重の時刻歴波形
(b)各部変位の時刻歴波形
(c)滑り機構におけるボルト軸力の時刻歴波形
(d)粘弾性体温度の時刻歴波形
図 2.14 最大振幅 30mm の八戸応答波加振による時刻歴波形(アクリル系試験体)
-1000 -500 0 500 1000
0 20 40 60 80 100 120 140 全体 ブレース部 ダンパー部
荷重 (kN)
時間 (s)
-30 -20 -10 0 10 20 30
0 20 40 60 80 100 120 140 全体 滑り機構 粘弾性体
変位 (mm)
時間 (s)
0 100 200 300 400
0 20 40 60 80 100 120 140 滑り機構
ボルト軸力 (kN)
時間 (s)
22 22.5 23 23.5 24
0 20 40 60 80 100 120 140 粘弾性体
温度 (℃)
時間 (s)
26 2.3.3 加振結果より評価したダンパーの力学的性状 (1) 微小振幅における力学的特性
図 2.15 に正弦波 0.33Hz の微小振幅加振の 3 サイクル目より得られた試験体全体の履歴 曲線を示す。実験時の室温は約 20℃である。図 2.16 に実験結果より評価した各加振振幅に おける試験体各部の貯蔵剛性Kdと等価減衰定数hを示す。等価減衰定数hは,正弦波加振 1サイクルの消費エネルギーEdと貯蔵剛性Kdを元に,式 2.3 を用いて求めた。
Kd d h K Kd Ed
2
2
max
……… (2.3)
ここに,
Ed (kN・mm) :1サイクルの消費エネルギー
max(mm) :最大振幅 Kd (kN/mm) :貯蔵剛性 Kd (kN/mm) :損失剛性ジエン系粘弾性体の貯蔵剛性はアクリル系に比べて約 1.5 倍大きいため,試験体全体の 貯蔵剛性はアクリル系試験体に比べて若干大きくなっている。一方,等価減衰定数は両者 ともに 0.1 程度であることから,両試験体は,ほぼ同等のエネルギー吸収能力を有すると いえる。
また,両試験体共に振幅依存性は小さく,振幅 0.1mm(粘弾性体歪み 5%)の微小変形に おいても安定した剛性とエネルギー吸収能力を有することがわかる。なお,0.2mm 以下の微 小振幅で等価減衰定数が若干大きくなる理由として,試験装置の摩擦の影響が考えられる。
27
(a)複合制振ダンパー(ジエン系試験体)
(b)複合制振ダンパー(アクリル系試験体)
図 2.15 微小振幅の正弦波加振における複合制振ダンパーの履歴曲線(加振振動数 0.33Hz)
-400 -300 -200 -100 0 100 200 300 400
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
複合ダンパ(ジエン系)
0.2mm(10%) 0.4mm(20%) 0.6mm(30%) 1.0mm(50%) 2.0mm(100%)
荷重 (kN)
変形 (mm)
振幅(粘弾性体歪み)
-400 -300 -200 -100 0 100 200 300 400
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
複合ダンパ(アクリル系)
0.2mm(10%) 0.4mm(20%) 0.6mm(30%) 1.0mm(50%) 2.0mm(100%)
荷重 (kN)
変形 (mm)
振幅(粘弾性体歪み)
28
(a)複合制振ダンパー(ジエン系試験体)
(b)複合制振ダンパー(アクリル系試験体)
図 2.16 微小振幅の正弦波加振における複合制振ダンパーの貯蔵剛性と減衰定数
0 500 1000 1500 2000 2500 3000 3500
0 0.5 1 1.5 2
全体 ダンパー部 ブレース部
貯蔵剛性 Kd(×10-1 kN/mm)
変形(mm) 貯蔵剛性(ジエン系)
0 0.1 0.2 0.3 0.4 0.5 0.6
0 0.5 1 1.5 2
全体 ダンパー部
変形(mm) 等価減衰定数(ジエン系)
減衰定数 h
0 500 1000 1500 2000 2500 3000 3500
0 0.5 1 1.5 2
全体 ダンパー部 ブレース部
貯蔵剛性 Kd(×10-1 kN/mm)
変形(mm) 貯蔵剛性(アクリル系)
0 0.1 0.2 0.3 0.4 0.5 0.6
0 0.5 1 1.5 2
全体 ダンパー部
変形(mm) 等価減衰定数(アクリル系)
減衰定数 h
29 (2) 入力レベルと各部の挙動
図 2.17 に,正弦波 0.33Hz 加振時(室温約 20℃)におけるジエン系,アクリル系の複合 制振ダンパー試験体各部の最大荷重,最大変形,単位振幅当たりの 1 サイクル吸収エネル ギーと加振振幅の関係を示す。
両試験体とも振幅 2mm 以下の微小振幅加振においては,ブレース部は弾性範囲内のため エネルギーを吸収せず,ダンパー部でのみエネルギー吸収が行われている。ダンパー部各 部の最大変形(図 2.17(c),(d))の図から,滑り機構ではすべりが発生せず,粘弾性体のみ が変形してエネルギーを吸収していることがわかる。
一方,加振振幅 10mm,30mm の大振幅加振では,ブレース部は鋼材系履歴ダンパーとして 機能するため,ブレース部のエネルギー吸収量が急激に増大している。ダンパー部の荷重 は滑り機構によって一定値に制限されている。
ダンパー部の変形については,加振振幅が大きくなるにつれて滑り機構の変形が支配的 となり,粘弾性体の変形量がほぼ一定値に抑制されることがわかる。ジエン系に比べて剛 性が低いため,アクリル系粘弾性体の変形量が若干大きくなるが,限界ひずみ 500%(変形 10mm)に対して十分余裕がある。
30
(a)各部の最大荷重(ジエン系) (b)各部の最大荷重(アクリル系)
(c)各部の最大変形(ジエン系) (d)各部の最大変形(アクリル系)
(e)単位振幅当たりの 1 サイクル 吸収エネルギー (f)単位振幅当たりの 1 サイクル吸収エネルギー
(ジエン系) (アクリル系)
図 2.17 複合制振ダンパーの加振振幅とダンパー各部の荷重,変形,吸収エネルギー 0
200 400 600 800 1000 1200
0 5 10 15 20 25 30 35 全体ダンパー部
ブレース部
荷重 (kN)
振幅 (mm)
0 5 10 15 20 25 30 35
0 5 10 15 20 25 30 35 全体
粘弾性体滑り機構
変形 (mm)
振幅 (mm)
0 0.5 1 1.5 2 2.5 3
0 5 10 15 20 25 30 35 全体
ダンパー部 ブレース部
エネルギー (kN・m/mm)
振幅 (mm)
0 200 400 600 800 1000 1200
0 5 10 15 20 25 30 35 全体
ダンパー部 ブレース部
荷重 (kN)
振幅 (mm)
0 5 10 15 20 25 30 35
0 5 10 15 20 25 30 35 全体
粘弾性体滑り機構
変形 (mm)
振幅 (mm)
0 0.5 1 1.5 2 2.5 3
0 5 10 15 20 25 30 35 全体
ダンパー部 ブレース部
エネルギー (kN・m/mm)
振幅 (mm)
31 2.4 シミュレーション解析
2.4.1 解析モデル
図 2.18 に示す力学モデルを複合制振ダンパーの解析モデルとして用いた。ブレース部に ついてはバイリニアモデルとし,鋼材の引張試験結果を元に 1 次剛性および降伏軸力を設 定した。また,バイリニアモデルの 2 次剛性は 1 次剛性の 1/20 を仮定した。粘弾性ダンパ ーの解析モデルとしては,粘弾性材料の温度依存性・振動数依存性を同時に考慮可能な分 数微分モデル 12)も提案されているが,本研究では,実用性を考慮して汎用解析ソフトでも 利用可能な 6 要素モデルを用いて粘弾性材料の振動数依存性を表現した。温度依存性は,
アクリル系(ISD111),ジエン系(SDM1)共にメーカー提案式13)を利用し,20℃に対する各 温度の特性変化率を用いて,6 要素モデルのパラメータを補正した。滑り機構は,剛塑性型 の履歴特性を与えたバイリニアモデルとした。滑り荷重は,摩擦材の摩擦係数 0.2(平均面 圧 10MPa)とボルト軸力 89kN×4 本の積から 142kN と設定した。
図 2.18 複合制振ダンパーの解析モデル
6 要素モデルにおいて,Maxwell モデルと Voigt モデルを組み合わせた理由は,Maxwell モデルのみでは粘弾性ダンパーの低速度における特性(静的剛性)が表現できず,滑りが 生じた際の粘弾性ダンパーの挙動を精度良く再現できないためである。6 要素モデルの係数 については,式 2.4 で表現される 6 要素モデルの貯蔵剛性Kd(
),損失剛性Kd’’(
)を,式 2.5 を用いて歪み 100%のホワイトノイズ(0.1Hz~10Hz)の変位加振結果から得られた粘 弾性ダンパー単体の貯蔵剛性 Kd(
),損失剛性 Kd’’(
)に,非線形最小二乗法で適合させ て決定している14)。データの回帰振動数範囲は 0.1Hz~4.0Hz である。図 2.19 に 6 要素モ デルの貯蔵弾性率,損失弾性率を実験結果と比較して示す。貯蔵弾性率,損失弾性率は,式 2.6 に示すとおり,貯蔵剛性,損失剛性をそれぞれS/dで除したものである。表 2.3 に 同定された 6 要素モデルのパラメータを示す。
K0
C0
K1 C1
K2 C2
Kh Kp
Kb
滑り機構(剛塑性)
粘弾性ダンパー(6要素モデル)
座屈補剛材(弾性)
座屈拘束ブレース(バイリニア)
ダンパー部
ブレース部
32
2
2 2 2 2
1 1 1 0
2
2 2 2 2
1 1 1 0
1 1
1 1
K C C K
C C C
Kd
C K K C
K K K
Kd
……… (2.4)
ここに,
K0,K1,K2 :6 要素モデルのバネ定数
C0,C1,C2 :6 要素モデルのダッシュポットの減衰係数
:円振動数
) (
) ) (
(
DKd F i
Kd ……… (2.5) ここに,
F(
) :ダンパー荷重の周波数成分 D(
) :ダンパー変位の周波数成分
S d d K G
S Kd d G
m m
……… (2.6)
ここに,
G
m(kN/mm2) : 粘弾性ダンパーの貯蔵弾性率G
m
(kN/mm2) : 粘弾性ダンパーの損失弾性率 S (mm2) :粘弾性体の貼付面積d (mm) :粘弾性体の厚さ