九州大学学術情報リポジトリ
Kyushu University Institutional Repository
ループヒートパイプの熱輸送特性に関する研究
岡本, 篤
https://doi.org/10.15017/1807031
出版情報:Kyushu University, 2016, 博士(工学), 課程博士 バージョン:
権利関係:Fulltext available.
ループヒートパイプの熱輸送特性に関する研究
岡本 篤
i
目次
第一章. 序論 ... 1
1.1 研究の意義 ... 1
1.2 従来の研究 ... 4
1.2.1
ループヒートパイプの軌道上実証実験と国内外の技術動向 ... 41.2.2
ループヒートパイプの起動特性に関する研究 ... 111.2.3
ループヒートパイプ内部の可視化に関する研究 ... 131.3 本論文の目的と構成 ... 15
第二章. ループヒートパイプの動作原理と熱力学考察 ... 17
2.1 ループヒートパイプの動作原理... 17
2.2 ループヒートパイプに対する熱力学的考察 ... 21
2.3 ループヒートパイプの作動流体の選定 ... 23
2.4 ループヒートパイプの作動流体封入量の考え方 ... 25
2.5 ループヒートパイプの特徴と宇宙機への適用の利点 ... 27
2.6 第二章の結論 ... 28
第三章. ループヒートパイプの解析モデル ... 30
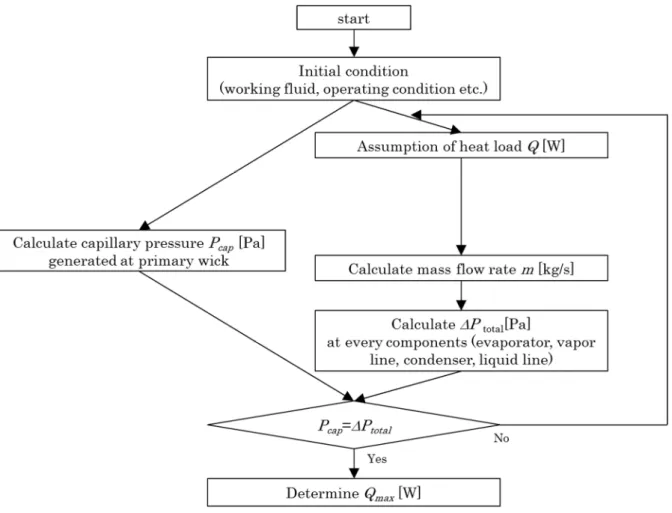
3.1 最大熱輸送量の評価 ... 30
3.1.1 基本事項と解析手順 ... 30
3.1.2 発生毛細管力 ... 32
3.1.3 圧力損失 ... 32
3.1.3.1 蒸発器(プライマリウィック)における圧力損失 ... 32
3.1.3.2 蒸気グルーブ,蒸気管,液管,バイオネット管における圧力損失 ... 33
3.1.3.3 凝縮器における圧力損失 ... 34
3.1.3.4 体積力による圧力損失 ... 36
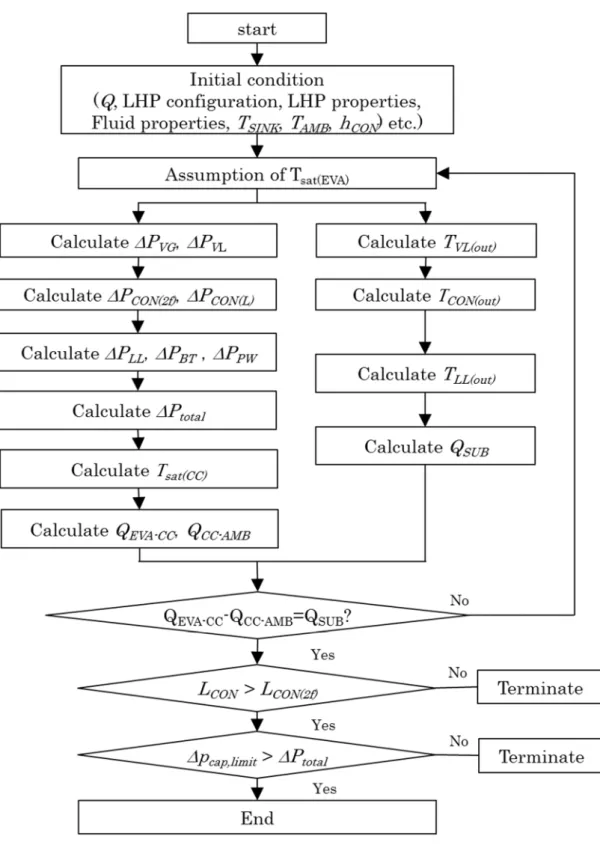
3.2 動作温度の評価 ... 37
3.2.1 解析手順と熱バランス式 ... 37
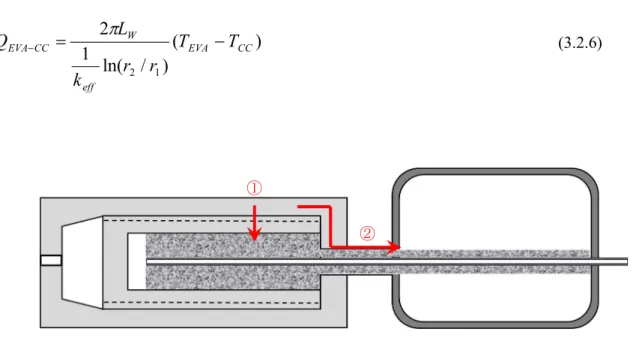
3.2.2 蒸発器からリザーバへの熱リーク量 ... 40
3.2.3 配管部における熱伝達 ... 41
3.2.3.1 蒸気管および液管における熱伝達... 41
3.2.3.2 凝縮器配管における熱伝達 ... 42
3.3
第三章の結論 ... 43ii
第四章. リザーバ内蔵型ループヒートパイプの軌道上実験 ... 44
4.1 軌道上実験の実施 ... 44
4.2 軌道上実験の実験装置 ... 45
4.3 軌道上実験の実験方法 ... 50
4.4 軌道上実験の実験条件 ... 52
4.5 軌道上実験の結果 ... 52
4.6 軌道上実験の考察 ... 61
4.7 第四章の結論 ... 64
第五章. リザーバ外付け型ループヒートパイプの作動流体の地上可視化実験 ... 65
5.1 中性子ラジオグラフィー技術を利用した可視化実験法 ... 65
5.2 可視化実験の実験装置 ... 67
5.3 可視化実験の実験方法 ... 70
5.4 可視化実験の実験条件 ... 72
5.5 可視化実験の結果と考察 ... 73
5.5.1 定常状態における蒸発器,リザーバ内部の作動流体の分布 ... 73
5.5.2 ドライアウト時の作動流体の挙動 ... 75
5.5.3 セカンダリウィックの効果 ... 78
5.6 第五章の結論 ... 80
第六章. リザーバ外付け型ループヒートパイプの地上実験 ... 81
6.1 宇宙機への適用を想定した地上実験モデルの要求仕様 ... 81
6.2 地上実験モデルの設計検討 ... 82
6.2.1 プライマリウィックの検討 ... 82
6.2.2 ループヒートパイプ各構成機器のサイズ検討 ... 86
6.2.3 セカンダリウィックの検討 ... 88
6.2.4 リザーバ容積および作動流体封入量の検討 ... 92
6.2.5 温度制御用ペルチェ素子の検討 ... 92
6.3 地上実験モデルの実験装置 ... 95
6.4 地上実験モデルの実験方法 ... 98
6.5 地上実験モデルの実験条件 ... 99
6.6 地上実験モデルの実験結果と考察 ... 100
6.6.1 スタートアップ特性 ... 100
6.6.2 基本的な熱輸送特性 ... 101
6.6.3 蒸発器への印加熱負荷変動 ... 104
6.6.4 凝縮器シンク温度変動 ... 105
iii
6.6.5 動作温度制御 ... 106
6.6.6 シャットダウン機能 ... 111
6.6.7 強制起動 ... 114
6.7 第六章の結論 ... 116
第七章. ループヒートパイプの今後の研究課題と宇宙排熱システムの将来展望 ... 117
7.1 ループヒートパイプの適用アプリケーション(宇宙用途) ... 117
7.1.1 衛星搭載機器の高密度実装による衛星構体の小型化 ... 117
7.1.2 展開型ラジエータによる衛星の大電力化対応 ... 118
7.2 ループヒートパイプの適用アプリケーション(地上用途) ... 120
7.3 ループヒートパイプの今後の研究課題と宇宙用排熱システムの将来展望 ... 121
7.4 第七章の結論 ... 124
第八章. 結論 ... 125
謝辞 ... 128
参考文献 ... 129
記号表 ... 134
付録 ... 137
1
第一章
.
序論1.1
研究の意義宇宙機はロケット等により打ち上げられた後,宇宙空間で過酷な熱環境に曝される.
投入軌道や衛星の姿勢制御により異なるが,一般的に太陽光に直接照射される箇所の温
度は
100°C
以上になり,一方,深宇宙に曝されており太陽光が入射しない箇所の温度は-100°C以下になる.しかし,宇宙機に搭載されているコンポーネントの許容温度は 一般的に-15°C~60°C程度であるため,積極的に制御を行わない場合,コンポーネン トの温度が許容温度範囲を逸脱し,正常に機能・性能を発揮できなくなり,最悪の場合 には宇宙機のミッションを達成できない事態に陥ってしまうことがある.よって,宇宙 機は構成する全ての要素が軌道上において遭遇することが想定される全ての条件下に おいて許容温度範囲に収まるよう熱設計を行う必要がある.また,軌道周回や姿勢変更 による外部熱環境の変化や運用モードの切り替えによる内部搭載機器の発熱量の変化 により温度サイクルや温度変動が生じるため,設計時にはそれらも考慮することが重要 である.
宇宙機の軌道上における熱環境のイメージを図
1.1.1
に示す.軌道上における温度は 次式に示される通り,外部から入射する軌道上熱入力(図1.1.1
に示す通り,太陽光の 直接入射,太陽光が惑星表面で反射して宇宙機に入射するアルベド,惑星表面からの赤 外放射がある),内部搭載機器の発熱量および宇宙機から外部への放熱量のヒートバラ ンスにより決定される.= + − (1.1.1)
Figure.1.1.1 Spacecraft thermal environment on orbit
2
現在,宇宙機に搭載される全ての構成機器は,図
1.1.2
に示す様々な熱制御方式を用 いて,軌道上で想定されるいかなる状況においても許容温度を逸脱しないよう設計され ている.熱制御方式は受動型熱制御方式と能動型制御方式に分けられる.受動型熱制御 方式は断熱スペーサやサーマルフィラーにより伝導コンダクタンスを調整したり,塗料 等を用いて表面の光学特性を変化させたりフィルムを用いて輻射による熱交換量を制 御するものであり,宇宙開発の黎明期においては主要な熱制御方式であり,現在も熱制 御の基礎となっている.一方,能動型熱制御方式は,ヒータや冷凍機のように投入電力 により加熱量や冷却量を制御するような機器を用いたり,ヒートパイプのように流体を 用いて熱輸送を行う方法などが含まれるもので,現在ではほぼ全ての宇宙機において受 動型熱制御方式と併用する形でこの能動型熱制御方式が採用されている[1].Figure1.1.2 Thermal control methods of spacecrafts
しかし,近年,宇宙機の熱制御系に対する要求が高まってきている.これまで高発熱 機器は熱制御の観点から放熱面を設けることができる宇宙機の外部パネルに搭載され てきた.しかし,宇宙機搭載機器の高密度実装化により外部パネルのみに搭載すること が難しくなってきており,内部パネル(WEBパネル等)にも高発熱機器を搭載するこ とが要求されてきている.しかし,高発熱機器を非放熱面である内部パネルに搭載する 場合,機器の発熱を効率よく排熱しなければ機器の温度が上昇し許容温度上限温度を超 えてしまう可能性がある.そのための方策としては,能動熱制御方式であるヒートパイ プを適用することが考えられる.宇宙機に適用する熱制御デバイスは,打ち上げ前に地 上で実施する設計検証試験において動作する必要がある.内部に封入した作動流体の蒸 発・凝縮現象を利用して熱輸送を行うヒートパイプでは,微小重力環境である宇宙空間 では凝縮部から蒸発部への液の還流はヒートパイプ内部に設けられた溝(グループ)で
3
発生する毛細管力によりなされるが,重力場ではその効果は期待できず,蒸発部が凝縮 部よりも上方に位置する場合,凝縮液が重力に逆らって蒸発部に還流することができず ドライアウトと呼ばれる作動流体が枯渇する現象が発生して熱輸送機能を維持するこ とができない.よって,打ち上げ前に地上(重力環境)で実施する設計検証試験で評価 を行うことを考慮すると,ヒートパイプは蒸発部と凝縮部は重力方向に対して水平もし くは蒸発部が凝縮部よりも下方に位置する状態に配置する必要があるが,全てのヒート パイプをそのような制約の中で適切に動作するような状態で配置することは非常に難 しいのが現状である.また,内部パネルに搭載された機器の排熱を衛星外表面の放熱面 まで熱輸送を行う場合,その必要な熱輸送距離は大型の衛星では少なくとも
3m
以上と なる.よって,そのような要求に対応するためには熱輸送特性が重力の影響を受けにく く,大量・長距離熱輸送が可能な熱輸送デバイスが必要となる.また,上述の宇宙機搭 載機器の高密度実装化に加えて,衛星電力の大型化にも対応する必要がある.衛星に搭 載される機器の発熱のうち,衛星の保温・温度維持に必要な分以外は,宇宙空間に輻射 にて排熱する必要がある.その排熱可能量は次式で表される通り,宇宙機の外表面に設 けられる放熱面の面積,温度,表面の光学特性により決定される.= − (1.1.2)
よって,宇宙機の総電力が大きくなった場合には各項の値を大きくすることにより排熱 量を多くする必要があるが,表面の赤外輻射率は現状技術でも
0.9
程度の高い値の材料 が用いられており,その値を技術革新により限りなく1
に近付けられた場合でも排熱量 の増加は約10%程度である.また,放熱面温度に関しては,放熱量は放熱面温度(絶対
温度)の4
乗で影響を受けるため放熱面温度を高めることの効果は大きいが,機器の許 容上限温度および機器から放熱面まで熱を輸送する際に生じる温度降下等を考慮する と,放熱面温度を高温に維持することは難しい.放熱面の面積に関しては,宇宙機外表 面の表面積が最大とりうる面積となるが,宇宙機の電力が大きくなった場合,外表面全 てを放熱面として使用した場合でも,必要な熱量を宇宙空間に排熱することが難しくな る.その場合,打ち上げ時はロケットのフェアリング内で収納しておき,軌道上で展開 して必要な放熱面積を確保する展開型ラジエータが必要となるが,展開機構を有する必 要があるため,宇宙機の主構体から展開されるラジエータまで熱輸送を行う熱輸送デバ イスに関しては可撓性を有する必要がある.上記の通り,宇宙機搭載機器の高発熱密度化,宇宙機の高密度実装化に伴い,宇宙機 の熱制御に関する要求が高まっており既存の熱制御方式のみでは対応できなくなりつ つある.また,遭遇する熱環境が大きく変動する次世代宇宙機ミッションでは,現状の 熱制御技術のみでは対応できないことが予想される.このような状況に応えるため,世
4
界の宇宙機関では今後益々高度化する熱制御要求に対応することを目的として,次世代 熱制御デバイスの研究開発が盛んに行われている.そのような次世代熱制御デバイスの 一つとして作動流体の相変化を用いて大容量の熱を長距離輸送可能なループヒートパ イプ(Loop Heat Pipe, 以下
LHP)が注目されている.LHP
は1980
年代前半に旧ソ 連で発明されたもので,旧ソ連の崩壊後,技術が公開され,ロシアおよび米国を中心に 研究開発が進められてきた.現在では軌道上実証実験を経て実利用ミッションに適用さ れている例も見られるが,その動作特性が完全に把握・解明されているとは言い難く,利用方法に関してもまだまだ発展途上段階にある.今後,信頼性の高い
LHP
を安定し て供給するためにはLHP
の動作特性をより詳細に把握し,それをベースにしてLHP
の効果的な使用方法および熱制御システムへのLHP
の適用方法について,検討・評価 を行っていく必要がある.1.2
従来の研究1.2.1
ループヒートパイプの軌道上実証実験と国内外の技術動向LHP
は1980
年代に旧ソビエト連邦でMaidanik
氏により宇宙機の熱制御系への適 用を目的として発明,開発された技術であり[2],旧ソ連の崩壊後,技術が公開され,ロ シアおよび米国を中心に発展した.ロシアは1989
年に世界で初めてLHP
の軌道上実 証実験を成功させた.ロシアから公開された技術に基づきCPL(Capillary Pumped
Loop)を中心に開発を行っていた米国[3-6]は 1997
年にスペースシャトルミッションで初めて
LHP
の軌道上実験を成功させた.ロシアによるLHP
の軌道上実証実験は1989
年に打ち上げられた天文衛星GRANAT
に搭載された実験装置ALYONA
により実施さ れた[7].実験装置ALYONA
を図1.2.1
に示す.図中,右側にLHP
の蒸発器が設置さ れ,左側に凝縮器が設置されており,蒸発器と凝縮器が蒸気管および液管でループ状に 接続されている.図の右側からの太陽光入射による入熱によりLHP
は起動し,熱は図 の左側に設置した放熱面まで輸送される.輸送距離は約4m
であり,作動流体にはプロ ピレンが用いられた.実験時の最小熱負荷は5W
で,最大熱負荷は100W
である.ALYONA
のLHP
は軌道上で問題なく起動し,約10
年にわたって安定した性能を示した.米国による
LHP
の軌道上実験はスペースシャトルミッションを利用して行われ,1997
年に打ち上げられた3
機のシャトル(STS-83,STS-94,STS-87)にLHP
実験 装置が搭載された[8].STS-83,STS-94にはSwales Aerospace
社製のLHP
が搭載さ れた.空孔径5.9um
のチタンの焼結金属がウィックとして使用され,作動流体はアン モニアであった.高温状態および低温状態からの異なる熱負荷での起動実験,熱負荷サ イクル試験,熱輸送機能喪失後の復帰確認試験など様々な実験が行われた.実験時に不 具合は発生せず予定していた全ての実験を実施し,軌道上実験の結果と地上実験の結果 はほぼ同等であったと報告されている.STS-87にはDynatherm
社製のLHP
が搭載 された[9].空孔径2.2um
のニッケルの焼結金属がウィックとして使用され,作動流体5
はアンモニアであった.
STS-83, STS-94
での実験と同様に,高温状態および低温状態 の初期状態からの異なる熱負荷での起動実験や熱負荷サイクル試験が行われた.実験条 件によっては,凝縮器内に過冷領域が存在しない状態になったことが報告されているが,大きな不具合はなく微小重力環境下における
LHP
の熱輸送特性データ取得を実施した.ロシアおよび米国は軌道上実験により軌道上での
LHP
動作を確認した後,2000 年 代よりLHP
を実際に宇宙機の熱制御系に組み込んで利用し始めており,現在では多く の宇宙機の熱制御システムにLHP
が採用されている.LHP
適用の一例として,将来の 地球の海面の上昇・下降の予測に資する地球の極地方の氷床の拡大/縮小を観測するこ とがミッションである米国の衛星ICESat
(図1.2.2)では,搭載ミッション機器である
レーザ高度計(Geoscience Laser Altimeter System, GLAS)の温度制御に従来型ヒー トパイプとLHP
が併用して用いられており,熱制御対象機器の±0.2K以内という高精 度な温度制御を実現し,ヒートパイプで集約した熱を距離の離れた場所に位置する放熱 面に熱輸送するためにLHP
が採用されている(図1.2.3)[10-13].これは,LHP
が有 する高い温度制御性と長距離熱輸送が可能という特性を利用した適用例である.国際宇 宙ステーションの日本実験棟「きぼう」の船外実験プラットフォームに搭載されている 日本のミッション機器である全天X
線監視装置(Monitor of All-sky X-ray Image,MAXI)では, CCD
カメラの温度制御を行うペルチェ素子の排熱方式としてLHP
が採用されているが日本製ではなく米国製(当時
Swales Aerospace
社,現Orbital ATK
社)の
LHP
である(図1.2.4) [14-16].また,2016
年2
月に打ち上げられた日本のX
線天文衛星
ASTRO-H
には50mK
以下に冷却する必要があるX
線検出器の冷却システムにおいて,機械式冷凍機の排熱に
4
式のLHP
が採用されているが,これも日本製ではな くスペイン製(IberEspacio社)のLHP
である(図1.2.5)[17-20].
一方,日本では
1990
年代よりLHP
の研究開発はスタートしたが,まだ実用化には 至っておらず,現在,軌道上実証フェーズにある.日本初のLHP
軌道上実証実験は2006
年12
月にH2A
ロケットで打ち上げられたJAXA
の技術試験衛星Ⅷ型にLHP
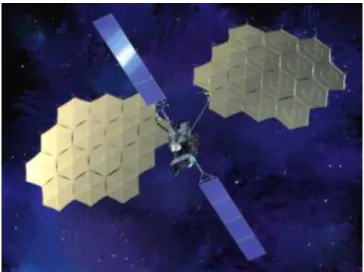
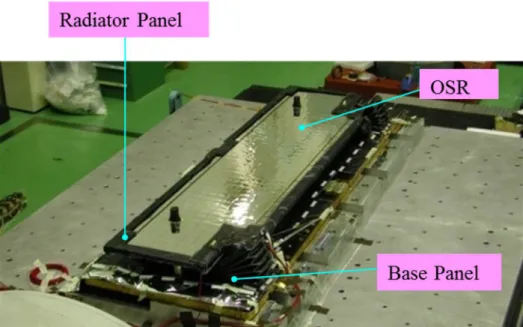
を組み 込んだ展開型ラジエータ(Deployable Radiator, DPR)の実験装置を搭載して実施された(図
1.2.6)[21-23].展開型ラジエータとは,衛星の大電力化に対応するため,打上げ
時にフェアリング内で収納しておいたラジエータを軌道上で展開して放熱面積を確保 するものである.
2
枚のハニカムパネルから構成され,搭載機器の発熱を模擬した発熱 パネルからもう一方のラジエータパネルまで熱輸送を行うためにLHP
が使用されてい る.これはリジッドなエンベロープで構成される従来のヒートパイプでは実現できず,配管にフレキシブル管を採用しても動作可能であるという
LHP
の特徴を生かした技術 である.打ち上げ後,軌道上におけるLHP
の安定動作を確認した後,実用化に向けた 研究開発のために有益な熱輸送特性データを取得した.6
Figure 1.2.1 Experimental system “ALYONA” on GRANAT satellite
7
Figure1.2.2 ICESat
Figure1.2.3 LHPs for thermal control of laser components on ICESat
Laser component (heat source)
LHP Evaporator
Heat pipe
LHP Condenser
Radiator
8
Figure1.2.4 MAXI on ISS/JEM and LHP for MAXI
9
Figure1.2.5 LHPs for X-ray astronomy satellite ASTRO-H
10
Figure1.2.6 LHP-based Deployable Radiator on ETS-Ⅷ
11
1.2.2
ループヒートパイプの起動特性に関する研究1.2.1
節に示した通り,LHP
は宇宙機の熱制御系に組み込んで機器の排熱を行う実利用が進んでいるものの,LHP は起動特性に不安があることや,同一条件で動作させた 場合でも直前の動作における加熱・動作履歴によっては動作温度が異なる,いわゆる動 作温度にヒステリシスが見られる場合があることが報告されている.特に起動特性につ いては軌道上で
LHP
が起動できない場合,LHP が熱制御を行う対象の機器の発熱を 逃がすことができず機器の温度上昇を招いてしまうため非常に危機的な状況になりう るため起動特性に関しては多くの実験的研究がなされている[24-28].代表的な研究と して,米国のKaya
とKu
の研究がある.Kaya
はLHP
の実験姿勢(オリエンテーショ ン)を固定した状態で低熱負荷での起動実験を繰り返し実施するとともに,LHP のオ リエンテーションを変化させて低熱負荷での起動実験を実施し,蒸発器加熱時の蒸発器 およびリザーバの温度差に着目し,LHP が起動する際の蒸発器とリザーバの温度差お よび起動するまでに要した時間を指標として実験データの整理を行って考察している[29].その結果, LHP
の姿勢や直前に実施した実験の加熱履歴や動作条件によってLHP
が起動する際の壁面過熱度(ここでは蒸発器とリザーバの温度差)が異なることや,起 動までに要する時間が異なることを報告している.Kuは
Kaya
らの実験や自身の実験 結果の考察に基づき,LHPの起動特性は蒸発器内部の気液の初期分布に応じて4
つに 分類できると報告している(図1.2.7)
.起動特性を決定する要因としては,1) ウィッ ク外周に設けた蒸気グルーブおよび2)
蒸発器の中心部(蒸発器コア)の加熱開始時の 初期状態がa)
液で満たされている状態,もしくはb)
蒸気で満たされている状態のい ずれであるかにより区分している[30].蒸気グルーブに関しては,液で満たされている 状態の場合はLHP
の起動のトリガとなる核沸騰を起こすためにある程度の過熱度が必 要となるが,蒸気が存在する場合には加熱開始後すぐに沸騰が起こる.また,蒸発器コ アについては液で満たされている場合は,蒸発器外周からウィックを通っての蒸発器コ アおよびリザーバへの熱リークが少ないが,蒸気が存在する場合には熱リークが多い状 態になる.図1.2.7(a)~(d)の初期条件は表 1.2.1
に示す通りであり,例えば図1.2.7(a)
はウィック外周の蒸気グルーブは液で満たされておらず蒸気が存在している状態で,蒸 発器コアは液で満たされている状態である.この場合,蒸気グルーブが液で満たされて いない状態のため,起動のトリガとなる核沸騰を起こすための壁面過熱度はそれほど必 要ない.また蒸発器コアが液で満たされているため,蒸発器外周に与えられた熱のウィ ックを通じた蒸発器コアおよびリザーバへの熱リーク量が少ないため,加熱開始直後に 蒸発器とリザーバの温度差が起動に必要な壁面過熱度の条件を満たすことができるた めすぐに起動でき,4 種類の中では一番起動特性に優れる.一方,図1.2.7(d)の場合,
蒸発器コアに蒸気が存在するため蒸発器外周から蒸発器コア,リザーバへの熱リークが 大きく,蒸発器とリザーバに温度差をつけるのが難しい状況であることに加えて,蒸気 グルーブが液で覆われているため核沸騰の発生に必要な壁面加熱度が大きい.よって,
12
加熱開始から必要な壁面過熱度を得るまでに長い時間がかかり,LHP の起動にとって 一番厳しい初期状態である.起動するまでの蒸発器温度のオーバーシュートは,
LHP
の 動作温度と熱制御対象機器の許容上限温度が離れている場合には問題とならないが,上 限温度が低い場合には大きなオーバーシュートを許容できず,最悪の場合,LHP が起 動する前に蒸発器の過熱,または機器をOFF
する必要が生じてしまうためLHP
の起 動特性は非常に重要である.Figure 1.2.7 LHP start-up scenarios
Table 1.2.1 Initial condition for each LHP start-up scenario
Vapor groove Wick core
(a) Situation 1 Vapor Liquid
(b) Situation 2 Vapor Liquid and vapor
(c) Situation 3 Liquid Liquid
(d) Situation 4 Liquid Liquid and vapor
13
1.2.3
ループヒートパイプ内部の可視化に関する研究1.2.2
節で述べた通り,LHP
の起動特性には加熱開始時における蒸発器内部の気液の初期分布が影響を及ぼす.また起動特性のような過渡特性だけではなく定常特性にも
LHP
内部の気液分布が影響すると考えられるため,その解明を目的としてLHP
内部 の可視化実験がいくつか行われている.大串らは2000
年にパラボリックフライトによ り,微小重力下での実験を行った.テフロンウィックと作動流体としてPF5060
(C6F14)を使用し可視化窓を設けた蒸発器を持つ
LHP
により微小重力実験を行った.これによ り,LHP の温度分布や可視化結果から微小重力がLHP
の動作を停止させることがな いと結論づけた[31].d’ Entremon
らは2010
年にチタンウィックと作動流体としてア ンモニアを使用したLHP
蒸発器内部にボアスコープを挿入して内部の可視化を行った.主に低熱負荷起動時の蒸発器コアにおける気泡の発生や液管への逆流現象を可視化し て解明した[32].ボアスコープによる
LHP
蒸発器の可視化実験のコンフィギュレーションを図
1.2.8
に示す.また,LHP
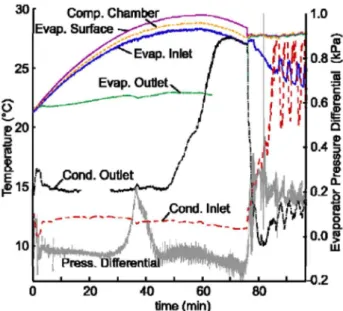
の逆流発生時の温度挙動およびそのときの可視化画像をそれぞれ図
1.2.9,図 1.2.10
に示す.以上のように,これまで
LHP
の可視化研究は数例存在する.しかし,いずれも可視 化対象は蒸発器のみでありLHP
全体の気液分布を可視化したものはない.また,可視 化にあたって,可視化窓を設置する,もしくはボアスコープを挿入するために,LHP
の 実際の使用時とは異なるコンフィギュレーションでの実験となっており,実験で得られ た観察結果および考察内容が実際の使用状態・条件における挙動として適用できるかに ついては疑問の余地がある.Figure 1.2.8 Configuration of visualization test using bore scope
14
Figure 1.2.9 Temperature profile of reverse flow during start-up
Figure 1.2.10 Pictures of reverse flow during start-up
15
1.3
本論文の目的と構成LHP
は優れた特性を有しており,従来技術では対応不可能な高度な熱制御要求に対 応できることから多くのアプリケーションにとって魅力的な熱制御方式である.宇宙機 においてLHP
を実利用するにあたっては高い信頼性が要求されるが,LHP の熱輸送 特性に及ぼす重力の影響や起動時における信頼性については十分な研究がなされてい るとは言い難い.本研究はLHP
の宇宙機への適用に向けて,重力がLHP
の熱輸送特 性に及ぼす影響を明らかにするとともに,LHP の起動時における信頼性を向上させる ことを目的としている.本研究はリザーバ内蔵型LHP
とリザーバ外付け型LHP
を対 象としており,リザーバ内蔵型LHP
については重力が熱輸送特性に及ぼす影響を把握 することを目的として同一の実験装置を用いた軌道上実験と地上実験の結果の比較評 価を行った.従来研究でも軌道上実験は行われているが,その多くは実用化に向けた軌 道上デモンストレーションを目的としたものであり,軌道上実験に用いる実験装置と同 一の装置を用いた地上実験との比較評価により重力の影響を評価して論理的に考察す ることは行われておらず,本研究で実施する同一実験装置を用いた重力の影響評価結果 は意義が大きい.リザーバ外付け型
LHP
は,リザーバ内蔵型LHP
の研究開発を通じて得られた知見 を反映して開発された小型・高機能タイプのLHP
である.起動時における信頼性向上 を向上させるための方策について検討を行い,その効果を地上実験モデルを用いた評価 実験にて評価をするとともに,中性子ラジオグラフィーを用いてLHP
内部に封入され た作動流体の挙動を把握することにより視覚的な評価も実施した.LHP の評価実験に おいては各構成要素の外壁に貼り付けた温度センサの指示値から内部の作動流体の挙 動を予測するのが一般的な手法であり,内部の作動流体の挙動を視覚的に捉える試みは ほとんど例を見ない.よって,本研究で実施する中性子ラジオグラフィー技術を用いたLHP
の熱輸送特性と作動流体の挙動の相関に関する評価結果は今後のLHP
研究にと って非常に有意義な効果をもたらすものと考える.本論文は
8
章から構成される.第一章では序論として本研究の意義,従来の研究の現状と本研究の目的について述 べる.
第二章では
LHP
の動作原理などの基本的な事項を解説した後,LHP の設計におい て重要な事項である作動流体の選定方法および封入量の決定方法について述べる.その 後,LHPを宇宙機に適用する利点について説明する.第三章では
LHP
の解析モデルについて述べる.定常解析モデルのモデル化手法を解 説し,さらに最大熱輸送量(熱輸送限界)および動作温度・圧力の計算方法を示す.第四章ではリザーバ内蔵型
LHP
の軌道上実験について説明し,同一実験装置を用い た地上実験との比較評価によりLHP
の熱輸送特性に及ぼす重力の影響を明らかにする.第五章では中性子ラジオグラフィー技術を用いた
LHP
の動作時の内部封入作動流体16
の挙動について説明し,作動流体の挙動と動作特性の関連性について述べる.
第六章では第四章に示したリザーバ内蔵型
LHP
の開発・軌道上運用を通じて得られ た知見および第五章に示したLHP
の作動流体の可視化実験で得られた知見に基づき開 発した宇宙用リザーバ外付け型LHP
について述べる.まず地上実験モデルの設計検討 の内容について述べた後,地上実験結果によりリザーバ外付け型LHP
の基本的な熱輸 送特性および新規に追加した機能である温度制御機能,シャットダウン機能について明 らかにする.第七章では
LHP
を用いた宇宙用排熱システムを提案するとともに,ループヒートパ イプに関する今後の研究課題と宇宙用排熱システムの将来展望について述べる.第八章では本研究で得られた結果を総括する.
17
第二章
.
ループヒートパイプの動作原理と熱力学考察2.1
ループヒートパイプの動作原理LHP
は内部に封入した作動流体の相変化とウィックの毛細管力を駆動力とした作動 流体の循環を利用して熱を輸送する熱輸送デバイスである[33-38].一般的なLHP
は図2.1.1
に示すように,蒸発器,蒸気管,凝縮器,液管,リザーバから構成され,内部をいったん真空にし,続いて作動流体を封入する.蒸発器の内部には図
2.1.2
に示すように プライマリウィックと呼ばれる多孔質体が内包されており,外周には蒸気が流れるため の溝が設けられている.蒸発器容器に熱が与えられると,その熱が蒸発器内部のプライ マリウィックに伝わり作動流体が蒸発する.このときプライマリウィックには円筒の半 径方向外側に向かって毛細管力が発生しているため,蒸気の流れは強制的に一方向化さ れる.蒸気はプライマリウィックの外周に設けられた溝(蒸気グルーブ),蒸気管を通 って凝縮器に到達する.凝縮器配管は地上実験ではコールドプレート,宇宙用ではラジ エータパネルに接触しており,それらと熱交換を行うことにより熱を放熱し作動流体は 凝縮する.作動流体は凝縮した後,サブクールされた状態で液管を通って蒸発器に還流 する.このサイクルを繰り返すことにより蒸発潜熱を利用した大容量熱輸送が可能とな る.なお,作動流体の循環にはポンプ等の外力は必要なく,プライマリウィックで発生 する毛細管力を駆動力として作動流体が循環される.蒸発器に与えられる熱量に応じて,蒸発量すなわち凝縮量が定まるので凝縮器内部での気液界面位置が異なり,余剰な作動 流体を貯蔵することを目的として蒸発器近傍にリザーバが設けられる.プライマリウィ ックはバイオネット管から供給される還流液により常に濡らされた状態になっている が,蒸発器への熱負荷が大きく変動した際には一時的に液体が供給されない,もしくは 液の供給量よりも蒸発量が上回る状態になり,ウィックがドライアウトして動作を継続 できない可能性がある.そのような状態を防ぐことを目的として図
2.1.2
に示すように リザーバとプライマリウィックの間にはセカンダリウィックと呼ばれる機構が設けら れており,プライマリウィックに液が不足した状態になると,セカンダリウィックで発 生する毛細管力によりリザーバからプライマリウィックに液が自動的に供給されるよ うになっている.日本では上述の一般的な
LHP
と異なるリザーバ内蔵型LHP
と呼ばれるLHP
の研究 開発も行われている[39].リザーバ内蔵型LHP
の蒸発器の断面図を図2.1.3
に示す.一 般的なLHP
は蒸発器に接続された形のリザーバを有するのに対して,リザーバ内蔵型LHP
は蒸発器に接続された形のリザーバは有さず,蒸発器中心部の空間をリザーバと して使用するものである.蒸発器中心部をリザーバと使用するため,一般的なLHP
に 比べて蒸発器ウィックの内径が大きくならざるを得ず,蒸発器が大型化し重量的なデメ リットはある.しかし,一般的なLHP
では蒸発器への熱負荷変動時や凝縮器の熱環境 変化時など蒸発器中心部およびリザーバ内部に存在する作動流体の液量が一時的に変 動する状況下において,リザーバから蒸発器ウィックに安定して液供給を行う必要があ18
るが,リザーバ内蔵型
LHP
の場合,いかなる使用条件においても液が必ずウィックを 内包した蒸発器部に存在するため,起動特性に優れ,負荷変動時にもドライアウトする 可能性が低いことが特徴的である.微小重力環境下における蒸発器内部の液分布のイメ ージ図を図2.1.3
に示すが,仮に液が蒸発器の軸方向の先端側もしくは根元側に偏在し てしまった場合,液量が少ない箇所はドライアウトを起こす危険性があるが,そのよう な事態に備えて,軸方向で液量に分布が出た場合でも,液が十分に存在する場所から液 量の少ない箇所に毛細管力により液が移動して蒸発器中心部内での液の偏在を解消す ることを目的としてウィックの内面にグループを設けている.LHP
が機能を維持するためには,蒸発器内部のプライマリウィックがループ全体 の圧力損失よりも大きな毛細管力を発生し続ける必要がある.LHPの利点の一つとし て,プライマリウィックで発生する毛細管力がループ全体の圧力損失と同じになるよ うにウィック内部に形成される気液界面の曲率半径が自動的に調整されることがあ る.ループ全体の圧力損失は次式の通り,プライマリウィック外表面の蒸気グルー ブ,蒸気菅,凝縮器,液管,プライマリウィックを通過するときの圧力損失に,重力 による体積力を足したものとなる.∆ = ∆ + ∆ + ∆ + ∆ + ∆ + ∆ + ∆ (2.1.1)
一方,プライマリウィックが発生する毛細管力は次式で表される.
∆ = 2 cos /
(2.1.2)
ここで,
[N/m]は作動流体の表面張力, [m]はウィック内に形成されるメニスカスの
曲率半径,
[ ° ]は作動流体とウィックとの接触角である.蒸発器への熱負荷が増大す
ると,質量流量が増え,ループ全体の圧力損失が増大する.それに対応して,メニス カスの曲率半径はループ全体の圧力損失に等しい毛細管力を発生するために小さくな る.曲率半径は蒸発器への熱負荷の増大に応じて小さくなっていき,最終的にはプラ イマリウィックの空孔径に等しくなる.このとき,プライマリウィックの発生毛細管 力が最大となる.∆ , = 2 cos /
(2.1.3)
蒸発器への熱負荷がさらに大きくなると,蒸気がプライマリウィックを貫通し,
LHP
の19
動作が停止してしまう.よって,通常動作時においては次式で表される条件が満たされ なければならない.
∆ ≤ ∆
(2.1.4)
Figure 2.1.1 Schematic of a loop heat pipe
20
Figure 2.1.2 Cross-section view of an evaporator and a reservoir of the general LHP
Figure 2.1.3 Cross-section view of an evaporator of the reservoir embedded LHP
21
2.2
ループヒートパイプに対する熱力学的考察LHP
の各作動点の状態をP-T
線図,T-s
線図に示したものをそれぞれ図2.2.1,図 2.2.2
に示す.図中の番号は図2.1.1
に示した番号に対応する.蒸発器に熱量Q
が印加される と,大部分の熱量Q EVA
はプライマリウィックの外表面における作動流体の蒸発に使わ れ,残りの熱量はウィックを通過して蒸発器コアに流入する.図2.2.1
の①における作 動流体の状態は飽和蒸気であり,ウィック外周に設けられた蒸気グルーブを通って②に 移動する間に加熱されて過熱蒸気となる.ただし,圧力は①よりも蒸気グルーブでの圧 損分圧力低い.蒸発器を出た蒸気は蒸気管を通って凝縮器入口(③)に到達する.蒸気 管表面は断熱材で覆われているため②-③の過程は圧損の分だけ圧力が降下する等エ ンタルピー過程と考えてよい.過熱状態で凝縮器に入った作動流体はラジエータで放熱 することにより飽和温度まで冷却され(④),さらに圧損により飽和蒸気圧曲線に沿っ て蒸気は完全に凝縮する.完全に凝縮した作動流体は凝縮器を出るまでの間,継続的に 冷却され続けるためサブクール状態で液管に流入する(⑥).液管も蒸気管同様,断熱 材で覆われているが,液の流速は蒸気の流速に比べて非常に遅いため完全断熱とはみな すことができず周囲と熱交換を行うことにより温度が上昇あるいは降下した状態でリ ザーバに入り(⑦),バイオネット管を通過して蒸発器コアに流入する(⑧)までの間 にリザーバの飽和温度まで温度が上昇する.定常動作時においては,蒸発器コアの圧力 はリザーバの圧力と同じであり,リザーバの一部として扱うことができるので,リザー バのP-T
線図上の位置は⑧となる.この場合,次式が成り立つ.∆ − ∆ = ( / )( − ) (2.2.1)
ここで, はプライマリウィックの蒸気グルーブ側の飽和温度, はリザーバ内の 液の飽和温度,
/
は飽和蒸気圧曲線の における圧力勾配である./
は作動流 体の物性値にも関連しており,クラウジウス-クライペリオンの式により次式で表され る./ = ℎ / ( − ) (2.2.2)
ℎ
は作動流体の蒸発潜熱, は蒸気の体積, は液の体積である.式(2.2.1)は,作動流 体が蒸発器を出てリザーバに戻るまでの間に発生する圧力損失による蒸発器とリザー バとの間の圧力差はそのまま飽和温度の差となることを意味しており,もし動作条件(蒸発器への熱負荷,凝縮器シンク温度等)が変化した場合,リザーバ温度および蒸発 器温度(ループの動作温度)は式(2.1.1),
(2.1.2), (2.1.3), (2.1.4), (2.2.1)を満たす飽和蒸
気圧線上の平衡点に移動する.これがLHP
の動作温度が決定される仕組みである.22
Figure 2.2.1 P-T diagram (Vapor Pressure Curve)
Figure 2.2.2 T-s diagram
23
2.3
ループヒートパイプの作動流体の選定LHP
の性能は作動流体の種類に大きく依存するため作動流体選定はとても重要であ る.選定基準は従来型ヒートパイプと同様であり,作動流体の選定にあたっては,ま ず動作温度範囲を決定する必要がある.次に,LHPを構成する材料との適合性を考慮 しなければならない.作動流体と構成材料との間に適合性がない場合,化学反応によ り材料に腐食を生じさせたり,不凝縮性ガスを発生させたりする可能性がある. LHP のような密閉型熱制御デバイスの内部で不凝縮性ガスが発生すると動作温度の上昇や 熱コンダクタンスの低下などの熱輸送特性の劣化を引き起こすと同時に,寿命を短く する可能性がある[40-42].主な作動流体と金属材料の適合性を表2.3.1
に示す.Table2.3.1 Compatibility between working fluids and metal materials
従来型ヒートパイプでは,作動流体の選定にあたっては,次式で表される液輸送因子
(liquid transport factor or figure of merit(メリット数))M
L [W/m 2 ]が使用されている[43- 44].
= (2.3.1)
は作動流体の表面張力,
ℎ
は作動流体の蒸発潜熱, は液の密度, は液の粘性係数 である.このメリット数は以下の理由により従来型ヒートパイプの最大熱輸送能力を予 測する際の指標とされている.表面張力が大きいことは発生毛細管力が大きくなり,蒸 発潜熱と液密度が大きいことは作動流体の流速が小さいことを意味し,流速が小さく液 の粘性が小さい場合,圧力損失が小さくなる.従来型ヒートパイプでは,凝縮した液が 蒸発部に還流する際の粘性による圧力損失がヒートパイプ全体の圧力損失の中で支配 的であるため,使用する動作温度範囲においてメリット数が大きくなるような物性値を 有する作動流体を選定している.LHP
に関しては,ループ全体の圧力損失に占める蒸気24
管における圧力損失が支配的であるため,次式で表される蒸気輸送因子
M V [W/m 2 ]が作
動流体の選定基準の一つとして使用できる[45].= (2.3.2)
は蒸気の密度, は蒸気の粘性係数である.図
2.3.1
に代表的な作動流体の蒸気輸送 因子のグラフを示す.幅広い温度範囲においてアンモニアが一番優れた値を示すことが わかる.しかし,2.2節で述べた通り,LHPの動作温度は作動流体の飽和蒸気圧曲線の 勾配/
に大きく依存するため,作動流体の選定にあたっては蒸気輸送因子だけではなく図
2.3.2
に示す使用温度範囲における飽和蒸気圧の勾配等も考慮する必要がある.Figure2.3.1 Vapor transport factors of working fluid
25
Figure2.3.2 Saturated vapor pressure
また,LHP の起動特性や動作特性には作動流体の封入量が影響を与えることが知られ ているため,作動流体の選定に加えて封入量の決定も大変重要である.作動流体の封入 量の考え方を次節で述べる.
2.4
ループヒートパイプの作動流体封入量の考え方2.3
節に示した通り,LHP
の性能は作動流体の種類に大きく依存するが,作動流体の 封入量もLHP
の起動特性,定常状態における熱コンダクタンス等の熱輸送特性に大き な影響を及ぼすため注意深く決定する必要がある.作動流体の封入量の決定にあたって は余剰液の液だめ機能を担うリザーバの容積も密接に関係する.リザーバの容積に関し ては基本的には大きくなることに対しては理論上の制約はないが,実際に宇宙機で使用 する際のスペースや質量の観点での制約を受ける.リザーバの最小容積については,作 動流体の封入量とあわせて,想定される全ての使用条件において以下の要求を満たす必 要がある.① コールドケース(蒸発器に熱が印加されていない,かつ凝縮器のシンク環境が低温 最悪環境の状態で液がリザーバ以外の部分に偏在する条件)において
LHP
のリザ ーバを除く部分の全体が作動流体で満たされるだけの液量を有すること(図2.4(a))
.② ホットケース(蒸発器に最大熱負荷が印加されている,かつ凝縮器のシンク環境が 高温最悪環境の状態でリザーバ以外の部分に存在する作動流体の量が少なくリザー
26
バ部分に存在する作動流体の量が多くなる条件)において余剰な作動流体を収納で きるだけのリザーバ容積を有すること(図
2.4(b)).
③
LHP
の非動作の最高使用温度においてLHP
が流体圧力でバーストしないだけのリ ザーバ容積を有すること.上記の考え方に基づいてコールドケース,ホットケース動作時に必要な液量を式で表 すと,各構成要素の容積,作動流体の温度依存性を考慮に入れた物性値を用いて,式
(2.4.1),式(2.4.2),式(2.4.3)で表される.また,高温状態において作動流体の液体量が LHP
全体の容積を超えていないことを式(2.4.4)で確認する必要がある. , は液体,蒸気の容積マージン(0~1 の係数)であり,LHP容積見積り誤差ならびに想定温度範囲 逸脱時を考慮して決定する必要がある. に関してはそれらに加えて
LHP
内部で発生 する可能性のある不凝縮性ガスも考慮する必要がある.コールドケース
CC C
V CC loop
C L
cold V V V
M , ( ) , ( 1 ) (2.4.1)
ホットケース
) (
] ) 1 (
[ ,
, H LL PW SW CC V H VG VL CON CC
L
hot V V V V V V V V
M (2.4.2)
CON VL VG SW PW liL
loop V V V V V V
V (2.4.3)
非動作時の最高温度における条件
)
max (
, loop CC
L
hottest V V
M (2.4.4)
(a)
コールドケース(b)
ホットケースFigure 2.4. Liquid distribution at “Cold case” and “Hot case”
Condenser Liquid
line
Vapor line
CC Primary wick
Secondary wick
Evaporator
Bayonet
Condenser Liquid
line
Vapor line
CC Primary wick
Secondary wick
Evaporator
Bayonet
27
ここで,
M cold
,M hot
,M hottest
はそれぞれコールドケース,ホットケース,非動作時最高温度における作動流体の質量である.
L,C
,V, c
はそれぞれコールドケース温度におけ る液,蒸気の密度,L,H
,V,H
はそれぞれホットケース温度における液,蒸気の密度,L,max
は非動作時最高温度における液の密度である.V loop
,Vcc
,V LL
,V PW
,V SW
,V VG
,V VL
,V CON
はそれぞれループ部(全容積からリザーバ容積を除した値),リザーバ部,液管,プライマリウィック,セカンダリウィック,プライマリウィック外周の蒸気グル ーブ,蒸気管,凝縮器の容積である.
2.5
ループヒートパイプの特徴と宇宙機への適用の利点LHP
は様々な優れた特徴を有している.LHP
の主な特徴およびそれらの特徴を利用 した宇宙機に適用した際のメリットを以下に示す[46].①動作特性が重力の影響を受けにくい
従来のヒートパイプは,その動作特性が重力の影響を大きく受け,トップヒート(重 力場において蒸発部が凝縮部よりも上方に位置する姿勢)では動作できない.よって,
宇宙機に適用するにあたっては,地上での設計検証試験を考慮して重力場でも確実に動 作するように配置する必要がありレイアウト上の制約が大きい.それに比べ
LHP
はそ の動作特性が重力の影響を受けにくいため,地上試験を考慮したレイアウト上の制約が なく,自由に配置することが可能となり,宇宙機の熱設計上,大きなメリットとなる.②高発熱機器の自由なレイアウトが可能
従来のヒートパイプは内部に液還流用のウィックが設けられた金属コンテナ(容器)
で構成されているため,曲げる等の加工は可能ではあるが,複雑な経路を形成すること は難しい.その半面,
LHP
は蒸発器と凝縮器が平滑管で結ばれているため,3
次元的な 経路などヒートパイプでは実現できなかった複雑な排熱パスの確保が可能となる.本特 性により,従来,排熱の困難さが原因で宇宙機の内部パネルに搭載できなかった高発熱 機器をラジエータパネルから離れた内部パネルに搭載することが可能となり,機器の高 密度実装が可能となり宇宙機の小型化を実現することができる.③高精度な温度コントロールが可能
LHP
は蒸発器の近傍に設けられたリザーバを少ない電力で加熱・冷却制御すること により,ループ全体の動作温度を高精度に制御することができる特性を有している.こ の特性を利用すれば,発熱量が大きく変動する機器や,惑星探査ミッション等で外部熱 環境が目まぐるしく変動するミッションにおいても,熱制御対象機器の温度を少ない電 力で一定制御することが可能となり,宇宙機設計の高度化が可能となる.28
④シャットダウンが可能
従来のヒートパイプは,熱制御対象機器の温度が低温になった場合でもヒートパイプ に温度差がある限り動作し続けるため,その場合,許容下限温度を補償するために保温 ヒータが必要となる.それに比べ
LHP
はリザーバを加熱しリザーバ温度を蒸発器温度 よりも少しだけ高くすることにより,ループ動作の圧力バランスが崩壊し,作動流体の 循環,すなわち熱輸送をストップさせることができる.この特性を利用すれば,熱輸送 を行いたくない場合にはわずかな電力により熱輸送をストップさせることができ,保温 ヒータの電力低減が可能となる.現在検討が進められている月面着陸機は高温に曝され る日照時と非常に低温になる夜間のいずれの時間帯においても熱的に成立させる必要 がある.特に太陽電池パネルにより電力を発生できない夜間にいかにヒータ電力を使用 せずに機器を保温して許容温度範囲内に制御するかが課題となっているため,LHP を 適用すれば機器の排熱が必要な日照時は熱輸送を行い,保温が必要な夜間には熱輸送を 停止させることにより,低温/高温いずれの場合にも熱設計が実現できる可能性がある.2.6
第二章の結論本章の結論を以下にまとめる.
1) LHP
の動作原理について述べた.LHP
は作動流体の蒸発潜熱を利用して大量・長距離熱輸送を行うことができる熱制御デバイスである.日本ではリザーバの位置が異なる
2
種類のLHP
の研究開発が行われている.蒸発器中心部をリザーバとして使用するリ ザーバ内蔵型LHP
はいかなる状況においても蒸発器に液が存在するためリザーバ外付 け型LHP
に比べて起動に対する信頼性は高いという利点を有する一方,配管長が長い 場合,リザーバの必要容積が大きくなり,その結果,蒸発器の大型化および蒸発器重量 の増大を招くといった欠点もあるため,LHP に求める要求事項に基づき,どちらのタ イプのLHP
が適切か検討を行って選定を行う必要がある.2) LHP
の動作をP-T
線図,T-s線図により説明し,熱力学的考察を行った.3) LHP
の作動流体の選定方法について述べた.作動流体の選定にあたっては,性能の観点と
LHP
使用材料との適合性の2
つの観点で検討を行う必要がある.まず性能の観 点では,LHP に要求する動作温度範囲の全域にわたって優れた熱輸送特性を示す作動 流体を選定することが重要であり,その選定指標として,温度依存性も考慮した物性値 により算出されるメリット数について述べた.次に使用材料との適合性については,作 動流体がLHP
に使用されている各材料との適合性がない場合,化学反応により材料に 腐食を生じさせたり,不凝縮性ガスを発生させたりする可能性があるため,使用する温 度範囲内における作動流体とLHP
使用材料の適合性をよく調べて,慎重に作動流体を29
選定する必要がある.4)
作動流体の封入量の考え方について述べた.作動流体の封入量の決定とリザーバ容 積の設計との間には密接な関係があり,製造時から使用時までの全期間における全ての ケースを想定し,リザーバに液が多く存在する高温最悪ケースにおいてもリザーバが液 で満たされないという条件と,リザーバに存在する液の量が少なくなる低温最悪ケース においてもリザーバが空の状態にならないという条件を同時に満たすような作動流体 の封入量およびリザーバの容積を決定する必要がある.5) LHP
の特徴と宇宙機への適用の利点について述べた.LHP
は従来型ヒートパイプに比べて大容量・長距離熱輸送が可能であるとともに,従来型ヒートパイプに比べてその 熱輸送特性が重力の影響を受けにくいため,蒸発器と凝縮器の位置関係に制約がないと ともに配管の自在なレイアウトが可能である.また,動作温度の高精度な温度制御や熱 輸送機能を任意に