2015
年度 博士論文
自律ナビゲーショ ン における
環境磁場の利用に関する 研究
2016
年 2 月 26 日
宇都宮大学大学院
工学研究科
システム 創成工学専攻
赤井 直紀
目 次
第 1 章
緒言
2
1.1 はじ めに . . . 2 1.2 関連位置推定法と 本研究におけ る アプロ ーチ . . . 4 1.3 磁場およ び幾何情報を 併用し た自己位置推定法の利点 . . . 6 1.4 本提案を 実現する ための課題. . . 9 1.5 本論文の構成 . . . 11 1.6 本章のま と め . . . 11第 2 章
磁場の実験的調査
13
2.1 はじ めに . . . 13 2.2 磁場の時間変化に関する 調査. . . 14 2.3 電子デバイ スが磁場へ及ぼす影響 . . . 18 2.4 環境中に存在する 磁場の乱れ. . . 19 2.5 磁場方位 . . . 23 2.6 本章のま と め . . . 24第 3 章
磁場を 用いたナビゲーショ ン 法
25
3.1 はじ めに . . . 25 3.2 磁気ナビゲーショ ン 法 . . . 26 3.2.1 環境磁場を 用いたナビゲーショ ン 法 . . . 26 3.2.2 磁場地図. . . 26 3.2.3 ナビゲーショ ン アルゴリ ズム . . . 27 3.3 磁気ナビゲーショ ン 法の実装. . . 29 3.3.1 ハード ウ ェ ア構成 . . . 29 3.3.2 磁場地図の構築 . . . 29 3.3.3 走行距離の推定 . . . 31 3.3.4 制御手法. . . 31 3.4 走行実験 . . . 32目 次 3.4.1 実験環境. . . 32 3.4.2 走行実験. . . 33 3.4.3 考察 . . . 35 3.5 本章のま と め . . . 36
第 4 章
幾何ラ ン ド マーク を 併用し た分散制御に基づく 磁気ナビゲーショ ン 法 37
4.1 はじ めに . . . 37 4.2 ハード ウ ェ ア構成 . . . 38 4.3 マ ルチナビゲータ システム に基づく 磁気ナビゲーショ ン 法 . . . 38 4.3.1 自律移動に用いる データ ベース . . . 38 4.3.2 マ ルチナビゲータ システム . . . 38 オド メ ト リ に基づく ナビゲータ . . . 40 幾何情報に基づく ナビゲータ . . . 40 磁場情報に基づく ナビゲータ . . . 41 磁場およ び幾何情報に基づく ナビゲータ . . . 41 優先度設定 . . . 41 4.4 自己位置推定 . . . 43 4.4.1 MCLによ る 磁場の乱れを 用いた走行距離推定 . . . 43 動作モデル . . . 43 尤度計算と 走行距離推定 . . . 43 4.4.2 姿勢推定. . . 44 4.5 実験 . . . 45 4.5.1 シミ ュ レ ーショ ン によ る 位置推定実験 . . . 45 4.5.2 学内走行実験 . . . 47 4.6 考察 . . . 51 4.7 本章のま と め . . . 54第 5 章
幾何ラ ン ド マーク ベースの位置推定法における 磁場の併用
55
5.1 はじ めに . . . 555.2 磁場およ び幾何地図を 併用し たMonte Carlo Localization . . . 56
5.2.1 動作モデルによ る 状態更新 . . . 57
5.2.2 磁場地図を 用いた姿勢推定 . . . 58
5.2.3 尤度計算. . . 59
目 次 5.3 シミ ュ レ ーショ ン 実験 . . . 59 5.4 実環境自律移動実験 . . . 62 5.5 考察 . . . 66 5.5.1 自己位置推定性能に関する 考察 . . . 66 5.5.2 リ ニア地図ベースのナビゲーショ ン 法と の比較に関する 考察 . . . 67 5.6 本章のま と め . . . 68
第 6 章
広域空間の磁場の地図化
70
6.1 はじ めに . . . 70 6.2 ガウ ス過程 . . . 71 6.2.1 ガウ ス過程によ る 回帰 . . . 71 6.2.2 ハイ パーパラ メ ータ の推定 . . . 73 6.3 ガウ ス過程回帰によ る 推定精度の検証. . . 73 6.3.1 ガウ ス過程回帰のための磁場地図のモデリ ン グ. . . 73 6.3.2 推定精度の検証 . . . 73 6.4 磁場計測のロ ボッ ト 化 . . . 77 6.4.1 磁場計測の効率化 . . . 77 6.4.2 磁場計測ロ ボッ ト . . . 77 2次元磁場計測ロ ボッ ト . . . 77 3次元磁場計測ロ ボッ ト . . . 78 6.5 磁場計測 . . . 78 6.5.1 2次元磁場計測 . . . 81 6.5.2 3次元磁場計測 . . . 82 6.6 ガウ ス過程回帰によ る 磁場推定 . . . 82 6.6.1 2次元磁場分布の回帰 . . . 83 6.6.2 3次元磁場分布の回帰 . . . 83 6.7 広域磁場地図に基づく 自己位置推定 . . . 85 6.8 自己位置推定実験 . . . 86 6.9 考察 . . . 89 6.9.1 磁場地図構築の効率に関する 考察 . . . 89 6.9.2 磁場地図の精度に関する 考察 . . . 90 6.10 本章のま と め . . . 90目 次
第 7 章
結言
92
7.1 各章のま と め . . . 92 7.2 結論 . . . 94 7.3 展望 . . . 95参考文献
96
謝 辞
103
本論文の概要
本論文では, ロ ボッ ト が指定さ れた経路を 確実に自律移動する 手法の開発を 主目的と し , 環境磁場を 利用し た自律移動に関する 方法を 提案し ている . ロ ボッ ト が自律移動を 行う 際に は, 事前に環境を 表す地図を 作成し , その地図と セン サ観測を 照合する こ と で, 地図上の位 置を 認識(自己位置推定)する こ と が有効である . 地図照合を 行う にあたり , 事前に構築し た 地図と セン サ観測が異な る 場合には, 照合に失敗し , 位置推定ができ な く な る 場合がある . すな わち , 状況が変化し やすい環境(動的環境)において は, 位置推定の失敗の危険が高く な り , 自律移動の実現が難し く な る . こ れに対し て , 磁場は変動し にく く , ま た, 磁気セン サはセン サが存在する 位置の情報の みし か計測し ない. そのため, 磁気セン サを 用いた位置推定は環境変化の影響を 受けにく い と いう 利点がある . その一方で, セン サの存在する 地点のみの値し か計測でき ないため, こ れが位置推定を 行う 際の問題と なる . 本論文では, こ の問題点を 解決し , 磁気セン サを 用い て 自己位置推定, およ び自律移動を 行う 方法を 提案する . 本論文では, ま ず第1章において, こ れま でに提案さ れた自己位置推定法に関し てま と め, こ れを 踏ま え て 磁気セン サを 用いて 位置推定を 行う 利点を 整理する . 次に第2章において , 不可視で理解し 難い磁場を 実験的に調査する こ と で, 磁場が自己位置推定に応用でき る こ と を 明ら かにする . そし て 第3章において , 外界情報と し て 磁場のみを 用いて 初の屋外環境で の長距離自律移動を 実現し た「 磁気ナビゲーショ ン 法」 について 言及する . こ れによ り , 磁 場を 用いた自己位置推定, およ び自律移動に関する 問題点を 明ら かにする . 第4章, 第5章, およ び第6章では, 本論文における 提案について ま と めて いる . 第4章 では, 磁気ナビゲーショ ン 法の拡張を 行う こ と を 目指し , 磁場およ び幾何情報を 用いた分散 制御に基づく 磁気ナビゲーショ ン 法を 提案し て いる . 第5章では, 磁場を 用いた位置推定, およ び幾何情報を 用いた位置推定法の利点を 併用する こ と を 目指し , 磁場およ び幾何地図を 併用し た位置推定法を 提案し て いる . ま た第6章では, 磁場計測のロ ボッ ト 化, およ び磁場 分布の回帰法を 用いて , 高速に2・ 3次元空間の磁場を 地図化する 方法を 提案し て いる . 本 論文にて 行われる 実験を 通し て , こ れら を 用いて 従来困難と いわれて いた, 動的環境下での 正確かつ確実な 自律移動を 実現でき る こ と を 示し て いる . 最後に, 第7章において 本論文を ま と め, 今後の課題と 展望を ま と めて いる .
第
1
章
緒言
1.1
はじ めに
世界各国の先進国に おいて , 少子高齢化に 伴う 労働力不足が危惧さ れて いる . こ れに 対 し , ロ ボッ ト を 産業用途に応用する こ と で, 労働力を 確保し よ う と する 取組が行われている . 人間が行う 作業の多く は, 一ヶ 所で行う 作業ばかり でなく , 移動を 伴う 作業である . そのた め, ロ ボッ ト の産業応用を 実現する ためにも , 自律移動技術を 確立する こ と が重要である . ま た, 高齢者や身体障害者が自由に外出する こ と ができ る 社会を 実現する ためにも , 自律移 動技術は重要な 技術である . こ れま でにも , 自律移動技術・ ロ ボッ ト に関する 研究は多く 行われており , 様々 な方法が提 案さ れて き て いる . Fig. 1.1には, Makarenkoら が指摘し て いる 自律移動ロ ボッ ト に関する 技術的基本要素, およ びそれら を 併用し た技術を 表し た図を 示す[1]. 最も 基本的な技術要素は, 自己位置推定(localization), 地図構築(mapping), およ び動作計画(motion plannning)
の3つである . 自己位置推定と は, 移動ロ ボッ ト に提供し た環境地図上において , ロ ボッ ト 自身がど の地点に 存在する かを 認識する こ と である . 地図構築と は, 上記環境地図を 構築 する こ と であり , こ の地図は, 何かし ら のセン サによ っ て 得ら れたデータ を 蓄積し て 構築し たデータ ベースと も いえ る . 動作計画と は, 自律移動を 行う にあたり , ロ ボッ ト がど のよ う に 移動する かを 計画する こ と である . さ ら に , こ れら の要素を 同時に 行う こ と が, 移動ロ ボッ ト における 重要な技術・ アプリ ケーショ ン と なる . 自己位置推定と 地図構築を 同時に行 う こ と はSimultaneous Localization and Mapping (SLAM)と 呼ばれ, 近年のロ ボティ ク ス
に おいて 頻繁に 研究さ れて いる 問題である . 地図構築と 動作計画を 同時に 行う こ と は探索 (exploration)と 呼ばれ, ロ ボッ ト が未知環境を 移動し ながら 環境把握を 行う 問題である . 動 作計画と 自己位置推定を 同時に行う こ と は自律移動(autonomous navigation)と 呼ばれ, 事 前に与え ら れた経路(も し く はロ ボッ ト 自身が生成し た経路)に従い, 目的地ま で自律移動 を 行う 問題である . 自律移動に 関する 研究は, こ れら に 関わる 研究が主である . な お, 自 己位置推定, 地図構築, およ び動作計画を 同時に行う こ と は統合的アプロ ーチ(integrated approach)と 呼ばれる が, こ れは複雑すぎる 技術である こ と や, 実用上重要視さ れて いない ため, 近年のロ ボティ ク スにおいて 注目さ れて いる 技術と は言い難い. さ ら に近年では, 移 動ロ ボッ ト の外観や印象に関する 研究も 重要視さ れて いる ため, その研究の一例を 挙げて お
1.1 はじ めに
く [2].
Fig. 1.1: Three fundamental components for autonomous mobile robots and integrated functions of them 本研究では, 自律移動ロ ボッ ト に焦点を 当てており ,「 実環境(特に人が行き 交う よ う な動的 環境)において , 正確かつ安定し た自律移動を 実現する こ と 」 を 主目的と し て いる . Fig. 1.1 に 示すよ う に , 自律移動を 行う ために は, 自己位置推定と 動作計画を 同時に 行う 必要があ る . 自己位置推定は, 正確かつ安定し た自律移動を 実現する ために重要である . こ れは, 自 己位置推定の結果に基づき 移動経路の追従を 行う ため, 位置推定の精度や安定性が自律移動 のそれに直接関与する ためである . 一方で動作計画は, 安全かつ確実な自律移動を 実現する ために重要である . こ れは, 動作計画によ り 目的地へ向かう ための経路生成を 行う ため, そ の経路が安全かつ確実に目的地へ辿り 着ける 経路である かが, 自律移動の安全性や確実性に 直接関与する ためである . 極論を 言え ば, 障害物を 回避し なく ても 問題ないよ う な環境であ れば, 自己位置推定を 正確に行い, その結果に基づいて経路追従を 行う のみで指定経路の自 律移動が実現でき る . 以上の議論から , 本研究の主目的「 正確かつ安定し た自律移動を 実現 する こ と 」 を 達成する ために, 本研究では自己位置推定に焦点を 当て る . 自己位置推定は基本的に, 与え ら れた環境地図と セン サの観測値を 比較・ 照合する こ と で 行われる . そのため, 環境地図を 構築し た際と 自己位置推定を 行う 際と で環境が変化し た場 合には, 地図と セン サ観測値と の照合に失敗し , 自己位置推定に失敗する こ と がある . すな わち , 環境変化が容易に発生する 動的環境においては, 正確に自己位置推定を 行う こ と が難 し い課題と なる . 人間の生活環境の多く は動的な環境であり , 移動ロ ボッ ト が人間の代わり に作業を 行う よ う な産業応用を 実現する ためにも , こ れは解決すべき 重要な課題と なる . そ
1.2 関連位置推定法と 本研究における ア プローチ こ で本研究では, 動的環境において正確かつ安定し た自己位置推定を 実現する こ と を 達成す べき 目的と し , こ れを 実現する 自己位置推定法を 提案する . そし て こ の方法を 用いて , 動的 環境下において 正確な 自律移動の実現を 目指す.
1.2
関連位置推定法と 本研究における ア プローチ
移動ロ ボッ ト における 基本的な位置推定法は, Borensteinら によ っ てま と めら れている [3]. 車輪の回転量を 累積し て 位置認識を 行う オド メ ト リ , 加速度計を 用いた慣性航法, およ び磁 気コ ン パスを 方位推定など , 基本的な方法がま と めら れて いる . し かし , こ れら 方法のみで 動的環境下において正確に自己位置推定を 行う こ と は難し い. 理由と し ては, Borensteinら が当該文献を ま と めた時点では, 実用的なセン サや方法が確立さ れていなかっ たためである . し かし , 現状提案さ れて いる 多く の方法は, 当該文献の考え を 基本と し て いる も のが多い.位置推定法と し て 最も 一般に知ら れて いる のは, Global Positioning System (GPS)と い
え る . GPSでは, GPS衛星から 発信さ れた信号を 移動体に搭載し たGPSレ シーバで受信 し , その結果に基づき 移動体の位置を 算出する . し かし , GPSレ シーバの周辺にビルな ど の背の高い障害物が存在する 場合, レ シーバがGPS衛星から の信号を 正確に受信でき なく なる ため, 位置推定に失敗し て し ま う . こ の問題はマ ルチパス(Multipath)と 呼ばれ, GPS において 最も 深刻な 問題と いえ る . こ れに対し てSuzukiら は, 赤外線カ メ ラ を 用いて マ ル チパスの影響を 受けて いないGPS衛星のみを 選択し , マ ルチパスによ る 位置計算の失敗を 低減さ せる 方法を 提案し て いる [4]. ま た山崎ら は, 周囲の3次元幾何状況を 考慮する こ と で, 同様にマルチパスによ る 影響を 軽減さ せる 手法を 提案し ている [5]. し かし 根本的に, 移 動体から 上空が見え な い場合には, GPSを 用いて 位置を 取得する こ と ができ な いと いう 問 題が解決でき な い. ま た, GPSの観測値は季節や天候の変化によ り 変化する と いう 報告も ある [6]. GPSと 同様に, 信号強度を 受信し て 位置推定を 行う 方法と し て , Wi-Fiを 用いた 位置推定法も 提案さ れて いる [7, 8]. し かし , Wi-Fiを 用いて 位置推定を 行う ためには, 多 く のアク セスポイ ン ト が必要と なり , こ のアク セスポイ ン ト 同士の電波の干渉によ り , 得ら れる 信号が不安定にな る 問題がある .
近年一般的に位置推定に利用さ れている センサは, カメ ラ やLight Detection and Ranging
(LIDAR)である . 上記セン サを 用いて距離観測を 行い, そこ から 目印と し て利用可能なラ ン
ド マ ーク を 検知し て 位置推定を 行う 方法が一般的である [9, 10]. なお, カメ ラ では複数の画
像間で対応点を 取る こ と で三角測量の原理を 用いて , LIDARではレ ーザビームを 飛ばし て
その反射を 検知する Time of Flight (TOF)方式を 用いてそれぞれ距離計測を 行う . 距離計測
1.2 関連位置推定法と 本研究における ア プローチ
観測データ と 地図の対応点間の誤差を 最小化する 方法やMonte Carlo Localization (MCL)
のよ う な ロ ボッ ト の存在位置を 確率的に表現する 手法が広く 利用さ れて いる [11, 12]. そし て , こ れら の方法を よ り ロ バスト にする ために, データ の対応点の探索方法や, ラ ン ド マ ー ク の観測方法に工夫を 行う 取組も 多い[13, 14]. 特にLIDARを 用いる 場合には, LIDARの 観測する 反射強度を 利用し て 位置推定を 行う 取り 組みも 提案さ れて いる [15]. ま た最近で は, RGB-Dセン サやマ ルチレ イ ヤ ーLIDARな ど の, 大量の距離観測を 短時間で行い膨大 な 点群を 得る こ と ができ る セ ン サが市販さ れる よ う に な っ た. こ れに 伴い, 計算時間の短
縮を 狙っ たNormal Distributions Transform (NDT)を 用いた位置推定法も 提案さ れて いる
[16, 17, 18]. NDTと は, 点群を いく つかの区分で分割し , その区分での点群を 点群の分布 と し て 表現する 方法である . 上記の技術を 用いる こ と で, 多く の実用的な位置推定法が実現 さ れたき た. し かし こ れら の手法も 必ずし も 万全と は言い難く , 動的障害物に囲ま れ有効な ラ ン ド マーク が検知でき ない場合, も し く はそも そも 周囲に有効なラ ン ド マーク が存在し な い場合には, 自己位置推定に失敗する こ と がある . ま た近年では, LIDARの計測データ が 人為的に変化可能である と いう 指摘も あり , LIDARのみに頼る こ と の危険性も 示唆さ れて いる [19]. こ れら に対し て, 磁気センサを 用いた位置推定法も 提案さ れている . 磁気センサのメ ジャ ー な使用方法は, Borensteinら によ っ て も 紹介さ れて いる 通り , 磁気コ ン パスを 用いて ロ ボッ ト の姿勢を 推定する 方法である [20, 21]. し かし , 環境中には磁性体が存在し , その磁性体 によ っ て 磁場が乱れて いる 地点では, 姿勢推定に失敗し て し ま う . 一方で, こ の磁場の乱れ が時間的に安定し て いる こ と がYamazakiら によ っ て 報告さ れて いる [22]. こ の性質を 利用 し て , 磁場の乱れを 目印と し て 自己位置推定を 行う 方法を Suksakulchaiら は2000年に提案 し た[23]. し かし こ の段階では, 位置推定はシミ ュ レ ーショ ン 実験だけに留ま っ て いた. そ
の後Rahokら は, 2008年に屋内環境で2次元の磁場地図(magnetic map)を 構築し , それ
を 用いて 移動ロ ボッ ト の位置推定が行え る こ と を 示し た[24, 25]. し かし 広域な空間の磁場 の地図化を 行う こ と は容易ではなく , Rahokら が行っ た実験は限定的な狭い環境での位置推 定実験に留ま っ て いる . Haverinenら も , 2009年に屋内環境でリ ニアな磁場地図(走行する 経路上の磁場のみを 地図化し たも の)を 作成し , それに基づき MCLを 応用し た移動ロ ボッ ト の自己位置推定が実現でき る こ と を 示し た[26]. さ ら に近年のスマ ート フ ォ ン の普及によ り , スマ ート フ ォ ン を 用いた位置推定法も 提案さ れ, 磁場を 位置推定に利用する 取組が注目 さ れて いる [27, 28]. 磁場を 用いた自己位置推定の精度は, 周囲の動的障害物の影響を 受け ないため, 動的環境下でも 利用可能と いう 利点がある . 一方で, カメ ラ やLIDARなど と 比 較する と , 磁気セン サから 得ら れる 情報量は少なく , 位置推定の精度を 高く 維持する こ と が 難し いと いっ た問題がある . こ れは, 磁気セン サがセン サの存在する 地点のみの磁場を 計測
1.3 磁場およ び幾何情報を 併用し た自己位置推定法の利点 する セン サであり , セン サの周囲環境の計測を 行わな いためである . 上記を 簡略にま と める と , LIDARな ど によ り 観測さ れる 距離情報を 用いる こ と で, 高い 精度で自己位置推定が行え る も のの, こ れのみを 用いて 万全に 位置推定を 行う こ と は難し い. 一方で, 磁気セン サを 用いた位置推定法を 用いる こ と で, その問題へ対処する こ と が可 能になる と 考え ら れる が, 位置推定精度を 高く 保つこ と は難し いと いえ る . そこ で本研究で は, カメ ラ やLIDARなどを 用いて観測さ れる ラ ン ド マーク (以下, 幾何ラ ン ド マーク)と 磁 場を 併用し た自己位置推定の実現を 目指す. こ れによ り , 両者の利点を 活かし た自己位置推 定法を 開発し , 高精度な自己位置推定かつ動的障害物に対し てロ バスト な自己位置推定の実 現を 目指す.
1.3
磁場およ び幾何情報を 併用し た自己位置推定法の利点
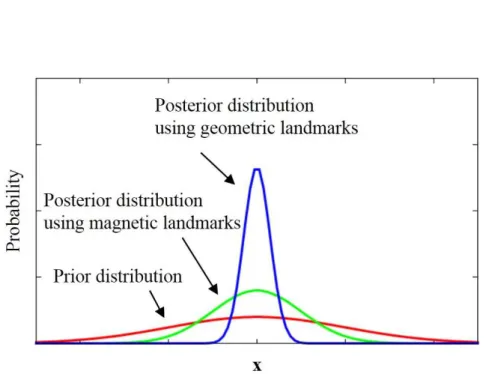
自己位置推定を 行う 際, 絶対的にロ ボッ ト が存在する 地点を 決定する こ と は難し く , ある 程度の誤差を 含んでロ ボッ ト が存在する 地点を 推定する こ と が多い. 自己位置推定はセン サ の観測を 用いて 行われる が, そのセン サ観測自体に誤差が含ま れる ためである . そのため, 移動ロ ボッ ト の自己位置推定に 関する 手法では, 誤差関数を 最小化する 最適化ア プロ ーチ (例えば[11])に比べて, 位置推定の誤差を 考慮し た確率的手法が採用さ れる こ と が多い[29]. こ れは, 最適化アプロ ーチが単に対応点間の誤差を 最小化する ために, 誤っ た対応(outlier) を 選択し て し ま っ た場合に, 即座に誤っ た位置に解が収束さ れて し ま う ためである . な お, こ こ でいう 対応点と は, 照合する 地図データ と セン サ観測データ を 照合する 際の対応を 意味 する . 一方で確率的アプロ ーチを 利用する 場合には, 誤対応を 選択し て し ま っ た場合におい て も , 位置推定の誤差を 考慮する こ と で, 推定結果の誤収束を 防げる こ と がある . 動的環境 下において 正確な対応点探索を 行う こ と は容易ではないこ と も あり , 確率的なアプロ ーチが 自己位置推定にはよ く 利用さ れる . 特に, カ ルマ ン フ ィ ルタ (Kalman filter)やパーティ ク ルフ ィ ルタ (particle filter)が広く 利用さ れて いる [30, 31]. 確率的アプロ ーチは, 基本的にはベイ ズの定理に基づいて 実装さ れる . 本論文で提案する 位置推定法はこ の概念を 応用し ている も のである ため, ま ずはこ の概念について端的にま と める . ベイ ズの定理によ り , 確率およ び条件付き 確率に関し て , 以下の恒等式が成り 立つ. p(b|a) = p(a|b)p(b) p(a) (1.1) 上式は, aが起き た下でのbが起き る 条件付き 確率p(b|a)が, a, bが起き る 確率p(a), p(b) と , bが起き た下でのaが起き る 条件付き 確率p(a|b)で計算でき る こ と を 表し て いる . ここ で, p(b|a)は事後確率(posterior probability), p(a)は正規化係数(normalization factor), p(b)は事前確率(prior probability), p(a|b)は尤度(likelihood)と それぞれ呼ばれる . 移動ロ
1.3 磁場およ び幾何情報を 併用し た自己位置推定法の利点 ボッ ト における 自己位置推定では, セン サ観測zと 制御入力uが与え ら れた下で, ロ ボッ ト の位置xに関する 確率分布p(x|z, u)を 求める こ と が問題と な る . こ の分布は, ベイ ズの定 理を 用いて , 以下のよ う に再帰的に計算する こ と ができ る . p(xt|z1:t, u1:t) = ηp(zt|xt) ∫ p(xt|xt−1, ut)p(xt−1|z1:t−1, u1:t−1)dxt−1 (1.2) こ こ で, 添字tは時系列(1 : tは時刻1から tま でのすべて のデータ 群), ηは正規化係数, p(zt|xt)はセン サの観測モデル(尤度分布), p(xt|xt−1, ut)はロ ボッ ト の動作モデルを それぞ れ表す. 上式を 端的に説明する と , 時刻t− 1におけ る 確率分布p(xt−1|z1:t−1, u1:t−1)を 動 作モデルに従い遷移さ せ, その結果に対し て セン サ観測モデルを 利用し た尤度付け を 行い, 確率分布を 更新する こ と を 意味する . こ の模式図を Fig. 1.2に示す. 通常, ロ ボッ ト の動作モデルによ る 状態更新の精度は低く , 動作モデルによ り ロ ボッ ト の状態が更新さ れた後の分布は, 裾の広い分布と なる (赤線). こ こ でいう 裾の広さ と は, 確率分布が示す推定の確かさ を 意味する も のであり , 推定値と 真値 と の差に関する も のではないこ と に留意さ れたい. こ れに対し て , セン サの観測モデルを 用 いて 尤度付けを 行い, 事後分布を 生成する こ と で, 再度裾の狭い分布を 生成する こ と が可能 と なる . Fig. 1.2には, それぞれ幾何ラ ン ド マ ーク を 用いた場合(青線)と 磁場ラ ン ド マ ーク を 用いた場合(緑線)の尤度付けを 行っ た際の事後分布の例を 示し て いる . 通常, LIDARや カメ ラ など は, 磁気セン サと 比較し て 多量の情報を 一度に取得する こ と ができ る . 特に, ロ ボッ ト から 離れた地点の観測を 行え る ため, 位置に関する 制約を 設け る こ と が容易と な り , 磁気セン サを 用いた場合と 比較し て, 位置推定の不確かさ を 減少さ せる こ と ができ る . し か し その一方で, 位置に関する 不確かさ を 急激に小さ く する ため, 誤対応があっ た場合には即 座に誤っ た位置に収束し やすいと いう 問題がある . こ れに対し て 磁気セン サを 用いた場合に は, 得ら れる 情報も 少なく , ロ ボッ ト から 離れた地点の情報も 得ら れないため, 急激に推定 の不確かさ が小さ く なる こ と はない. すなわち , 磁気セン サを 用いた尤度付けを 行っ た事後 分布を 新たに事前分布と し て用い, こ れに対し て幾何ラ ン ド マーク を 用いた尤度付けを 行い 事後分布を 生成する こ と で, 誤収束の抑止に繋がる . さ ら に, 幾何ラ ン ド マ ーク が取得でき ない地点においても , 磁場を 利用し て位置の推定精度の不確かさ を 減少さ せる こ と が可能と なる . こ れら の効果によ り , 動的障害物が存在する 環境における 安定し た位置推定, およ び 幾何ラ ン ド マーク の存在し ない地点での位置推定がそれぞれ可能と なる . 本論文で提案する 位置推定法は, こ の概念に基づく 方法である .
1.3 磁場およ び幾何情報を 併用し た自己位置推定法の利点
Fig. 1.2: Conceptual figure of prior and posterior distributions on mobile robot localization. The red distribution represents prior distribution that is updated on the basis of the motion model. Hem of the posterior distributions are narrower than that of the prior distribution because they are updated by using the sensor models. However, hem of the posterior distribution using magnetic landmarks (green line) is widere than that of the posterior distribution using geometric landmarks (blue line). The magnetic sensor cannot obtain more information than geometric observers (e.g., LIDAR or camera) and localization accuracy using the magnetic sensor is not higher than that of localization using geometric landmarks.
1.4 本提案を 実現する ための課題
1.4
本提案を 実現する ための課題
磁場を 自己位置推定に利用する にあたり ま ず問題と なる こ と は, 磁場が不可視であり その 性質を 理解し 難いこ と である と いえる . 幾何ラ ン ド マ ーク は可視である ため, こ れを 用いた 自己位置推定法は直感的に理解でき る . 一方で磁場は不可視である ため, ど のよ う に利用す れば位置推定が行え る かが理解し 難い. ま た, 磁場は温度変化など によ り 変化する と いっ た 報告も ある . さ ら に問題なのは, 電子デバイ スが磁場を 乱すため, ロ ボッ ト 自身が磁性体と なる こ と である . すなわち , 自己位置推定に磁場を 利用し よ う と し て も , ロ ボッ ト の存在に よ っ て磁場のパタ ーン が変化し て し ま う 恐れがある . 磁場を 自己位置推定に利用する にあた り , 磁場の性質について 明ら かにする 必要がある . 磁場を 地図化し , こ れを 自己位置推定およ びナビゲーショ ン に利用する 際には, 1)ロ ボッ ト が走行する 経路周辺の磁場のみを 地図化し それを 用いる 方法, 2)ロ ボッ ト が通過する 可能 性がある すべての空間の磁場を 地図化し それを 用いる 方法の2種類が考えら れる . 1)の方法 では, ロ ボッ ト が自己位置推定を 行え る 区間は走行経路周辺のみに限定さ れて し ま う が, ロ ボッ ト が指定さ れた経路を 自律移動する のみであれば十分である . 一方2)の方法では, 空 間全体にて磁場を 用いた自己位置推定を 行う こ と が可能である が, 磁場地図を 構築する のに 多大な 時間が要求さ れる こ と と な る . 1)の方法を 採用し た場合には, 走行経路上の磁場の地図し か保有し ていないため, ロ ボッ ト に確実な指定経路の追従を 行わせる こ と が課題と なる . すなわち , ロ ボッ ト の自己位置推 定自体は経路上のど の地点に 存在する かを 特定する のみの安易な 問題と な る が, 経路追従 を 正確に行わなければ指定経路の自律移動が行え なく なる . こ の概略を 表し た図がFig. 1.3 である . 通常, 移動ロ ボッ ト のナビゲーショ ン を 行う 際には, 2次元(も し く は3次元)の空 間上でロ ボッ ト の位置を 認識する . 2次元平面上でロ ボッ ト の状態を 一意に拘束する ために は, 位置x, yと 姿勢θを 求める 必要がある . 走行距離dし か推定でき ない場合には, 2次元 平面上で状態を 拘束する こ と ができ ず, たと え走行距離の推定値が正確だと し て も 指定経路 を 走行し て いない場合がある . そのため, 経路追従を 行う ための動作生成, およ びナビゲー ショ ン が重要と なり , こ の操作自体が自己位置推定に近い要素と なる . さ ら に問題と なる こ と は, 空間全体に対する 磁場の観測値を 予測する こ と ができ ないこ と である . そのため, 磁 場に対する 観測のモデルを 構築する こ と が困難と なり , 一定の領域を 観測し て 位置推定を 行 う 幾何ラ ン ド マ ーク ベースの位置推定法と の統合方法を 十分に考慮し な く て はな ら い. 以上の議論を 基に, 本研究におけ る 提案を 実現する ための課題を 以下のよ う にま と める . 磁場の性質を 明ら かにし , 自己位置推定およ び移動ロ ボッ ト のナビゲーショ ン に応用 する 方法を 明ら かにする こ と .1.4 本提案を 実現する ための課題
Fig. 1.3: Navigation image based on a topological magnetic map, which only records a magnetic field on a travel path. A robot can recognize its own travel distance d by using the map. However, accurate navigation cannot be performed using only travel distance estimation since state of the robot cannot be constrained on a two-dimensional plane. In the image, two robots estimate that own travel distance is d, but they located at different points. To accurately navigate the path, motion control must be performed for compensating navigation errors. Also, measurement values of an entire magnetic field cannot be predicted since the magnetic map does not record magnetic fields other than that of the travel path. This is a problem in fusion of magnetic and geometric map-based localization methods.
1.5 本論文の構成 走行経路上の磁場のみを 地図化し て 走行する 場合に, 経路から 逸脱せずに確実に指定 経路を 追従でき る 位置推定・ ナビゲーショ ン を 実現する こ と . 走行経路上の磁場のみを 地図化し た場合に, 磁場地図と 幾何地図を 併用し た自己位置 推定を 行う 際の統合方法を 考案する こ と . 空間全体の磁場を 地図化し て利用する ために, 効率的な磁場地図構築を 実現する こ と .
1.5
本論文の構成
本論文の構成は以下の通り である . ま ず次章第2章では, 磁場に 対する 実験的な 調査を 行い, その性質を 明ら かにする . こ れによ り , 磁場を 自律ナビゲーショ ン に用いる 際の留意 点や, そ の基本と な る 方法論を 示す. 第3章では, 磁場を 用いたナビゲーショ ン 法と し て代表的と いえ る , Rahokら によ っ て提案さ れた磁気ナビゲーショ ン 法(magnetic navigation
method)を 上記実験的調査の結果に 基づき な がら 再実装する . そ し て , 磁場を 用いたナビ ゲーショ ン 法によ り 自律移動が行え る こ と を 示し , 同時にその問題点も 明ら かにする . 第4 章では, 磁気ナビゲーショ ン 法を ベースと し て , 幾何ラ ン ド マ ーク を 併用し た自己位置推定 を 組み合わせた方法を 提案する . こ れによ り , 磁気ナビゲーショ ン 法において 問題と さ れて いた点が解決でき る こ と を 示す. 第5章では, 幾何ラ ン ド マ ーク を ベースと し た自己位置推 定法において , 磁場地図を 用いた自己位置推定を 組み合わせる 方法を 提案する . 本手法は, 上記組み合わせ手法と は異なる 利点を 有し , かつロ バスト な実環境ナビゲーショ ン を 行う こ と ができ る . 第6章では, 磁場地図構築に関する 議論を 行い, 効率的に磁場地図を 構築する 方法を 提案する . 特に, 広域な屋内環境の2およ び3次元の磁場の地図化を 実現し , 提案地 図構築法の性能を 示す. 最後に第7章において , 本研究を ま と める .
1.6
本章のま と め
本章では, 本研究において 実現すべき 目的や, そのために達成すべき 課題を 述べた. 本研 究の主目的は「 実環境(特に人が行き 交う よ う な 動的環境)において , 正確かつ安定し た自 律移動を 実現する こ と 」 である . こ の主目的を 達成する ために, 移動ロ ボッ ト の自己位置推 定機能に焦点を 当てた. 動的環境下において正確かつ安定し た自己位置推定を 実現する こ と を 目的と し , 磁場を 用いて 自己位置推定を 行う 方法に着目し た. 磁場は周囲の物体(磁性体 は除く)の移動によ っ て 変化し ないため, 磁場を 用いて 自己位置推定を 行う こ と で, 動的環 境において も 安定し た自己位置推定が実現可能と な る . し かし , 磁場は不可視である ため, 我々 人間にと っ て は理解し 難い情報である . そこ でま ず, 磁場を 実験的に調査する こ と で,1.6 本章のま と め こ れを 移動ロ ボッ ト のために応用する 方法を 明ら かにする こ と と する . さ ら に, 磁場を 用い て自己位置推定を 行う 際には, (1)高い精度で自己位置推定を 行う こ と , (2)広域な磁場の地 図を 構築する こ と の2点が困難な課題と し て 挙げら れる . そこ で本研究において 成し 遂げる べき 課題と し て , 磁場およ び幾何情報を 併用する こ と で, ロ バスト な自己位置推定およ び自 律移動を 実現する こ と , およ び広域な空間の磁場を 高速に地図化する こ と を 設定し た. 次章 以降では, こ れら の内容について 言及し て いく .
第
2
章
磁場の実験的調査
2.1
はじ めに
磁場を 移動ロ ボッ ト の位置推定やナビゲーショ ン に応用する 際に最も メ ジャ ーな 方法は, 磁気コ ン パスを 用いた姿勢推定法である [20, 21]. し かし , 環境中には鉄骨やマ ン ホールな ど の磁性体が存在し , それら が磁場の乱れを 発生さ せる . 磁気コ ン パスを 用いて 姿勢推定を 行う 場合, こ のよ う な乱れの影響を 受け, 姿勢推定に失敗する . 一方で, こ のよ う な磁場の 乱れが時間的に安定し て いる と いう こ と がYamazakiら によ っ て 報告さ れて いる [22]. こ れ に基づき , 磁場の乱れを 自己位置修正を 行う ためのラ ン ド マーク と し て利用する 方法が提案 さ れはじ めた(例え ば[23, 24, 25, 26]). し かし , 磁場が不可視であり , その性質を 理解し 難 いと いう こ と も あり , 磁場に基づく 位置推定法が一般的にな っ て いる と は言い難い. こ れに対し て , 環境中の磁場の可視化を 行う 試みはいく つか行われて いる . Angermann ら は, ロ ボッ ト を 用いて 磁場を 可視化する ための方法論を 提案し て いる が, Angermannら の調査は屋内環境のみに留ま っ ている[32]. Frasslら は, モーショ ンキャ プチャ と 小型移動ロ ボッ ト を 利用し た磁場マッ ピン グを 行い, 一部屋分の磁場を 可視化し ている[33]. Robertson ら は, 磁場ベースのSLAMを 行い, 建屋内の磁場地図構築を 実現し , こ れを 可視化し て い る [34]. WahlstromやSolinら は, モーショ ン キャ プチャ を 利用し た磁場観測と ガウ ス過程 (Gaussian process)[35]を 用いた磁場分布回帰を 行い, 任意磁性体のモデル化, およ びその 周囲の磁場の可視化を 実現し て いる [36, 37]. こ れら の取組は, 磁場を 直感的に理解する た めに重要である と いえ る . し かし , 移動ロ ボッ ト に対し て ど のよ う に磁場を 応用する かの議 論ま では, こ れら の取り 組み内では行われて おら ず, 屋外環境における 磁場の調査も 行われ て いな い. 本章では, 移動ロ ボッ ト が自己位置推定, およ びナビゲーショ ン を 行う こ と を 前提と し て, 磁場がどのよ う な性質を 有する のかの議論を 行う . こ のために, 手作業での磁場観測を 行い, その結果を 実験的に調査する . こ れら の結果から , 磁場を 移動ロ ボッ ト に利用する 際の留意 点や, その利用方法な ど を 明ら かにする .2.2 磁場の時間変化に関する 調査
2.2
磁場の時間変化に関する 調査
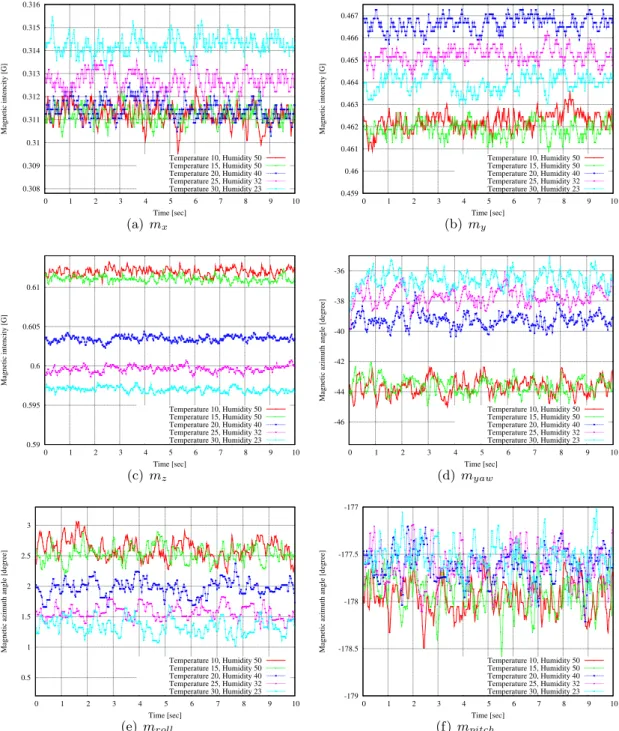
磁場の乱れに関する 時間的な安定性はYamazakiら によ っ て報告さ れている [22]. 一方で, 磁場が気候によ っ て 変動する こ と が指摘さ れて いる[38]. こ れら の関係を 明ら かにする ため に, ま ずは磁場の時間変化に対する 調査を 行う . 本調査では, ま ず磁気セン サを 一ヶ 所に固定し , 時間が経過し て 温度・ 湿度が変化し た環 境での磁気セン サの計測値の変化を 調べた. なお本調査では, 3軸の磁気強度を 測定でき る 磁気セ ン サ3DM-DHを 用い, 計測は40 Hzで10秒間行っ た. Fig. 2.1に は, 屋内環境に おいて 行っ た調査結果を 示す. な おxy平面は地面と 平行な 面であり , z軸は地面方向である と し て いる . Fig. 2.1(a)(b)(c)は3軸の磁気強度(mx, my, mz), Fig. 2.1(d)(e)(f)は各平
面の磁場方位(myaw, mroll, mpitch)の計測値を それぞれ示し て いる . 室内環境では温度を 手
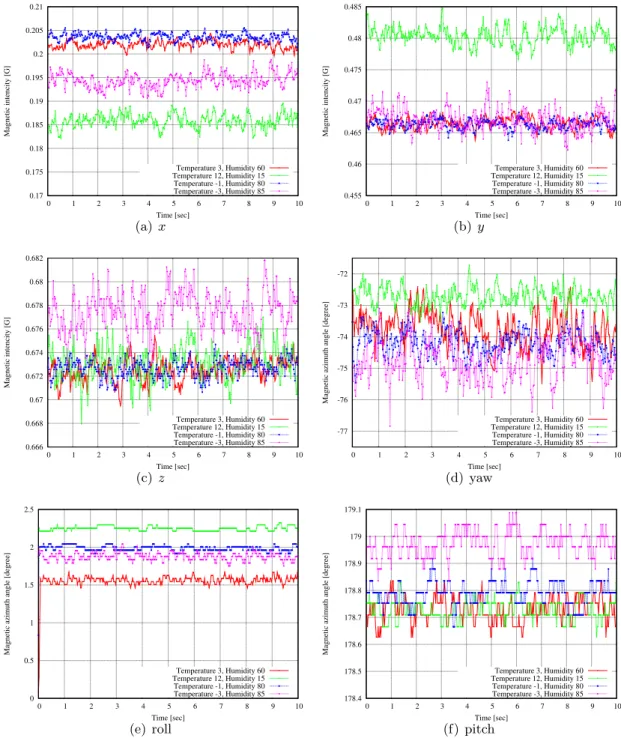
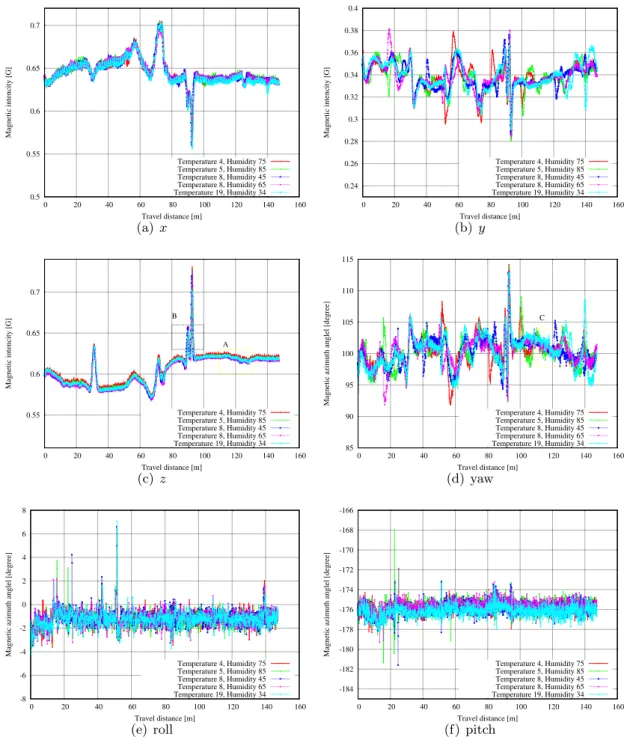
動で設定し , それぞれ温度・ 湿度が(10, 50 %), (15, 50 %), (20, 40 %), (25 , 32 %), (30, 23 %)の環境で計測を 行っ た. こ の結果よ り , 時間変化(温度・ 湿度変化)に よ り , 磁気セン サの計測値が変動し て いる こ と が確認でき る . ま たFig. 2.2には, 同様の計 測を 屋外で行っ た結果を 示す. 屋外環境では, 温度・ 湿度がそれぞれ(3, 60 %), (12, 15 %), (-1 , 80 %), (-3 , 85 %)の環境で計測を 行っ た. こ の結果から も Fig. 2.1と 同 様に, 磁気セン サの計測値が時間経過に伴い変化し て いる こ と が確認でき る . こ の一方でFig. 2.3に は, 磁気セ ン サの計測地点を 移動さ せて , 時間経過に 伴う セ ン サ の計測値を 調査し た結果を 示す. すなわち , 移動ロ ボッ ト が移動し ながら 観測する 値である と みな せる . な お, 磁気セ ン サを 移動さ せる 経路は屋外の直線経路と し , 経路内に は複数 の磁性体が存在し , 磁場の変動が含ま れて いる . xy平面, およ びz軸の方向は上記の検証 時と 同様であり , x軸は進行方向と し て いる . こ れら の結果から は, 時間変化(温度・ 湿度 変化)がある 場合において も , 同様の地点で磁場の乱れが観測でき て いる こ と がわかる . さ ら に Fig. 2.4に は, Fig. 2.3に 示すA, Bおよ びCの領域の拡大図を 示す(Aおよ びBは Fig. 2.3(c), CはFig. 2.3(d)に示さ れて いる). こ れら の拡大図から は, 磁気セン サの観測 値が時間によ り 変化し て いる こ と がわかる . こ の結果自体は, 上記の屋内外での調査と 同様 の結果である と いえ る . 一方で, 磁場の乱れによ る 変動が, 磁場の時間変化によ る 変動よ り も 十分に大き いこ と がわかる . 以上の調査結果から , 磁場の乱れに基づく 位置推定が, 時間 変化に対し て 安定し て 行え る と いう こ と がわかる . C地点の拡大図は, yaw軸の磁場方位の拡大図を 示し て いる . 本検証において は, yaw軸 は地面と 平行な軸である と し て いる . こ の軸の磁場方位は, 移動ロ ボッ ト の方位推定によ く 用いら れる . こ の図から は, 時間変化がある 場合において も , 同様の磁場方位が計測でき る こ と がわかる . すなわち , 磁場地図を 構築し , セン サ観測と 地図の値を 比較する こ と で, 方 位を 正確に推定でき る 地点が存在する こ と も わかる . し かし その一方で, 方位角の値が変化
2.2 磁場の時間変化に関する 調査 0.308 0.309 0.31 0.311 0.312 0.313 0.314 0.315 0.316 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (a) mx 0.459 0.46 0.461 0.462 0.463 0.464 0.465 0.466 0.467 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (b) my 0.59 0.595 0.6 0.605 0.61 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (c) mz -46 -44 -42 -40 -38 -36 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (d) myaw 0.5 1 1.5 2 2.5 3 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (e) mroll -179 -178.5 -178 -177.5 -177 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 10, Humidity 50 Temperature 15, Humidity 50 Temperature 20, Humidity 40 Temperature 25, Humidity 32 Temperature 30, Humidity 23 (f) mpitch
Fig. 2.1: Change in magnetic sensor readings due to temperature and humidity changes in the indoor environment. The figures (a), (b), and (c) show magnetic intensities ((a) is x, (b) is y, and (c) is z) and (d), (e), and (f) show magnetic azimuth angles ((d) is yaw, (e) is roll, and (f) is pitch), respectively.
する 地点も 見ら れる ため, 全地点に おいて こ のよ う な 方位推定が行え な いこ と も 明ら かで ある .
2.2 磁場の時間変化に関する 調査 0.17 0.175 0.18 0.185 0.19 0.195 0.2 0.205 0.21 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (a) x 0.455 0.46 0.465 0.47 0.475 0.48 0.485 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (b) y 0.666 0.668 0.67 0.672 0.674 0.676 0.678 0.68 0.682 0 1 2 3 4 5 6 7 8 9 10 Magnetic intencity [G] Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (c) z -77 -76 -75 -74 -73 -72 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (d) yaw 0 0.5 1 1.5 2 2.5 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (e) roll 178.4 178.5 178.6 178.7 178.8 178.9 179 179.1 0 1 2 3 4 5 6 7 8 9 10
Magnetic azimuth angle [degree]
Time [sec] Temperature 3, Humidity 60 Temperature 12, Humidity 15 Temperature -1, Humidity 80 Temperature -3, Humidity 85 (f) pitch
Fig. 2.2: Change in magnetic sensor readings due to temperature and humidity changes in the outdoor environment.
ま た一例と し て , Fig. 2.5には屋内環境の2次元磁場を 地図化し た例を 示す. なお, こ の
地図化の詳細について は, 本論文第6章において 言及する . こ の結果から , 屋内環境には多
く の磁場の乱れが存在する こ と がわかる . ま たFig. 2.3の結果から は, 屋外環境において も
磁場の乱れが複数存在する こ と がわかる . すなわち , 環境中のいたる 地点には磁場の乱れが 存在し て おり , かつこ れら の乱れは時間的に安定し て いる ため, 磁場の乱れを 目印と し た位
2.2 磁場の時間変化に関する 調査 0.5 0.55 0.6 0.65 0.7 0 20 40 60 80 100 120 140 160 Magnetic intencity [G] Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (a) x 0.24 0.26 0.28 0.3 0.32 0.34 0.36 0.38 0.4 0 20 40 60 80 100 120 140 160 Magnetic intencity [G] Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (b) y 0.55 0.6 0.65 0.7 0 20 40 60 80 100 120 140 160 Magnetic intencity [G] Travel distance [m] A B Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (c) z 85 90 95 100 105 110 115 0 20 40 60 80 100 120 140 160
Magnetic azimuth anglel [degree]
Travel distance [m] C Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (d) yaw -8 -6 -4 -2 0 2 4 6 8 0 20 40 60 80 100 120 140 160
Magnetic azimuth anglel [degree]
Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (e) roll -184 -182 -180 -178 -176 -174 -172 -170 -168 -166 0 20 40 60 80 100 120 140 160
Magnetic azimuth anglel [degree]
Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (f) pitch
Fig. 2.3: Change in magnetic sensor readings due to temperature and humidity changes on the same path.
2.3 電子デバイ スが磁場へ及ぼす影響 0.605 0.61 0.615 0.62 0.625 0.63 110 115 120 125 130 Magnetic intencity [G] Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (a) A 0.63 0.635 0.64 0.645 0.65 0.655 0.66 88 90 92 94 96 98 100 102 104 Magnetic intencity [G] Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (b) B 94 96 98 100 102 104 106 110 115 120 125 130
Magnetic azimuth anglel [degree]
Travel distance [m] Temperature 4, Humidity 75 Temperature 5, Humidity 85 Temperature 8, Humidity 45 Temperature 8, Humidity 65 Temperature 19, Humidity 34 (c) C
Fig. 2.4: Enlarged figures of part A, B, and C shown in Fig. 2.3.
2.3
電子デバイ スが磁場へ及ぼす影響
ロ ボッ ト はPCやモータ など の電子デバイ スを 搭載する ため, 当然ながら 磁場を 乱す存在 と なる . 磁場の乱れを 自己位置推定に利用する ためには, 同じ 地点で同じ 磁場の乱れが観測 でき る こ と が前提と なる ため, ロ ボッ ト 自身の電子デバイ スによ り 磁場が乱れる こ と は大き な問題と なる . そこ で, ロ ボッ ト に搭載さ れる 代表的な電子デバイ スが磁場へ及ぼす影響を 調査する こ と と し た. 本調査では, PC, バッ テリ , およ びモータ それぞれ2種類の磁場への影響を 調査し た. PC は磁界シールド のある な し , バッ テリ はサイ ズの大小, モータ はDCブラ シ・ ブラ シレ ス モータ の違いでそれぞれ調査を 行っ た. なお磁場への影響の調査方法と し て , ま ず電子デバ イ スがない状態で磁場観測を 行い, それを 基準と し た後に, 電子デバイ スを 置いた状態で再 度観測を 行い, その差分の絶対値を 求める こ と と し た. 磁場の観測にはMicroStrain社の3 軸磁気セ ン サ(3DM-DH)を 用い, x軸を 電子デバイ ス 方向, y軸を そ の90 deg右方向, z 軸を 地面方向と し た. Fig. 2.6には, 電子デバイ スの磁場への影響の調査結果を 示す. 各デ2.4 環境中に存在する 磁場の乱れ
Fig. 2.5: Indoor magnetic filed [39]
バイ スにおいて も , 種類によ っ て 磁場への影響が異な る こ と がわかる . ま た重要な こ と は, PC, バッ テリ , DCモータ の影響範囲が, 影響の小さ いデバイ スであれば10から 15 cm程 度無視でき る ほど 小さ く なる こ と である . そのため, ロ ボッ ト に磁気セン サを 搭載する 際に は, 磁場への影響の少な い電子デバイ スを 選定し , かつそれら から 磁気セン サを 15 cm離 すこ と で, こ れら の影響を 無視でき る こ と がわかっ た.
2.4
環境中に存在する 磁場の乱れ
Yamazakiら の報告, およ び上述の調査よ り , 環境中に存在する 鉄骨やマ ン ホールなど の 磁場の乱れが時間的に安定し て いる こ と がわかっ た. 本節では, こ れら の磁場の乱れを 位置 推定を 行う 際の目印と し て利用する ために, 実際に磁場の乱れを 可視化し , その性質の調査 を 行う . Fig. 2.7には, 地面の下に配管が埋設さ れて いる 経路で磁場計測を 行っ た結果を 示す. 移 動ロ ボッ ト に応用する こ と を 考え , X軸が経路と 平行な軸, Y軸が経路と 直行する 軸である と し て いる . な お本調査において は, 同様に3DM-DHを 用いて おり , Fig. 2.7に示す結果 は地面(z軸)方向の磁場強度の観測結果である . 局所的に凸な磁場変化が発生し ている こ と が確認でき る . 磁気セン サと 配管の間は少な く と も 20 cm以上は離れて いる と 想定さ れる が, Fig. 2.6に示す電子デバイ スの影響と 比較する と , 配管が大き な磁場の変化を 発生さ せ て いる こ と が確認でき る . こ れは, 磁性体が発する 残留磁場の強さ が, 磁性体自体の大き さ に依存する ためである . 鉄骨など の物体は, ロ ボッ ト に搭載さ れる 電子デバイ スなど と 比較 し て はる かに大き いので, その影響によ る 磁場の乱れも 大き く なる . こ の結果から , ロ ボッ2.4 環境中に存在する 磁場の乱れ
2.4 環境中に存在する 磁場の乱れ
ト に搭載さ れた磁気セン サによ っ て, 環境中に存在する 磁場の乱れを 十分に観測でき る こ と がわかっ た.
Fig. 2.7: Magnetic fluctuation of peak style [40]
Fig. 2.8には, 経路脇にプラ ズマ 発生装置が設置さ れて いる 地点で磁場観測を 行っ た結果
を 示す. な お, こ の結果も 地面(z軸)方向の磁場強度を 表し た結果と な っ て いる . Fig. 2.7
と 同様に, X軸が経路に平行な軸であり , こ の軸に対し て 直行する よ う に磁場が傾斜し て い
る こ と が確認でき る . こ のよ う に, 環境中には凸な磁場変化のみでなく , 傾斜する よ う な緩 やかな 変化の磁場の乱れが存在する こ と も 確認でき た.
Fig. 2.8: Magnetic fluctuation of gradient style [40]
環境中に存在する 磁場の乱れは, 主に上記の2種類(局所的な凹凸変化, も し く は緩やか な傾斜変化)である . 空間全体の磁場の地図化が実現でき て いる 場合には, 単純に磁場の強 度を 照合する こ と で自己位置推定を 行う こ と ができ る . し かし , 走行経路と その周辺の磁場 の地図化し か行っ ていない場合には, 単純な強度の照合のみで正確に位置推定を 行う こ と は 難し い. そこ で, こ れら の磁場の変化を 用いて 位置推定を 行う 方法について 考え る . Fig. 2.9には, Fig. 2.7に示す凸な磁場変化を 走行経路(距離)に従っ て プロ ッ ト し た図を 示す. 当然ながら , 走行経路の途中に凸な磁場変化が現れる . こ の変化を 目印と し て , 走行
2.4 環境中に存在する 磁場の乱れ 距離の修正を 行う こ と ができ る . さ ら にFig. 2.10には, Fig. 2.8に示す傾斜変化の磁場を 走行経路(距離)に従っ て プロ ッ ト し た図を 示す. Fig. 2.10はY = -1, 0, 1 mの地点を プ ロ ッ ト し た結果を 示し て おり , 経路全体で磁場強度が傾斜し て いる こ と が確認でき る . その ため, 指定経路上の磁場強度に合う よ う にロ ボッ ト を 制御する こ と で, 指定経路に対する 横 方向の誤差を 補正する こ と ができ る . こ れら を 用いる こ と で, 自律走行のために必要な位置 推定・ 修正を 実現でき る . なお, 左右の磁場強度の値が経路上の磁場強度に比べて ど ち ら も 高い(も し く は低い)場合には, 経路上の左右ど ち ら に逸れて いる かを 判断する こ と はでき ず, 位置補正を 行う こ と はでき な い.
Fig. 2.9: Plot of magnetic fluctuation of peak style according to travel distance
2.5 磁場方位
2.5
磁場方位
磁場を 用いて自己位置推定を 行う にあたり , 磁場方位は姿勢を 推定する ために有用な情報 である . し かし な がら , 磁性体に よ り 磁場が乱れて いる 地点では, こ の推定に 失敗する 場 合がある . そこ で, 磁場方位について も 観測・ 調査を 行う こ と で, その性質を 調べる こ と と する . Fig. 2.11には, 周囲に 磁性体が存在し な い地点での磁場方位の観測結果を 示す. な おこ こ でいう 磁場方位と は, 地面に水平な 面(yaw軸)の磁場方位を 意味し て いる . すべて の地 点で同様の磁場方位が観測さ れて いる こ と が確認でき る . 一方でFig. 2.12には, 周囲に磁 性体が存在する 地点での磁場方位の観測結果を 示す. こ の地点はFig. 2.8に示す地点と 同様 の地点であり , 磁場方位が位置によ り 異な る 値と な っ て いる こ と が確認でき る .Fig. 2.11: Stable field of a magnetic azimuth angle [40]
Fig. 2.12: Unstable field of a magnetic azimuth angle [40]
磁性体が周囲に存在し ない地点では, 観測し て いる 磁場方位と 磁場地図(こ こ では磁場の
可視化結果に相当する)に記録さ れて いる 磁場方位の値の差分を 零と する こ と で, 磁場が大
き く 時間変化し て いない場合には, 概ねロ ボッ ト を 目的の姿勢する こ と が可能である . し か し 磁性体が存在する 地点では, 位置推定の精度が高く ない場合に上記と 同様の操作を 行う と ,
2.6 本章のま と め ロ ボッ ト が目的の姿勢と なら なく なる . 第1で述べたよ う に, 磁場のみを 用いて 高い精度の 自己位置推定を 行う こ と は困難である ため, こ れは深刻な問題である . その一方でこ の地点 には, Fig. 2.8に示すよ う な磁場の乱れが存在する . すなわち , こ れら の乱れを 用いた位置 補正を 行う こ と ができ る . 以上よ り , 磁場方位を 用いた姿勢修正を 行う 地点を 限定し , 磁場 の乱れに基づく 位置推定を 行う こ と で, ロ ボッ ト を ナビゲーショ ン する こ と が可能と な る .
2.6
本章のま と め
本章では, 不可視の磁場を 実験的に調査し , その性質を 明ら かにする こ と で, ロ ボッ ト が 自己位置推定およ びナビゲーショ ン に磁場を 利用する ための方法を 明ら かにし た. 今回の調 査ではま ず, 磁気セン サの計測値の時間によ る 変化を 検証し た. その結果, 計測値が時間に よ り 変化する も のの, 磁場の変動がその変化よ り も 大き く 現れる こ と がわかり , 磁場の乱れ に基づく 位置推定が時間変化に対し て 安定し て 行え る こ と がわかっ た. ま た, 磁場方位も 時 間によ り 変化する も のの, その値が同様になる 地点がある こ と も わかり , 姿勢推定に利用で き る こ と も わかっ た. さ ら に, ロ ボッ ト に搭載さ れる 代表的な電子デバイ スが磁場へ及ぼす 影響を 調査し , その影響を 無視する こ と ができ る 距離を 調べた. その結果, 磁場への影響の 少ない電子デバイ スを 選定し , かつデバイ スと セン サの距離を 約15 cm確保する こ と で, 影 響を 無視でき る こ と がわかっ た. こ れら に加え 本検証では, 環境中に存在する 磁場の乱れ, およ び磁場方位を 手作業で測定し , その可視化を 行っ た. こ の結果から , 局所的な凹凸の変 化, およ び緩やかに傾斜し て 変化する 磁場の乱れが存在する こ と を 示し , こ れら を それぞれ 異なる 方法で位置推定に応用する 方法を 考察し た. さ ら に磁場方位の値が, 周囲に磁性体が 存在する かし ないかで変化する こ と を 示し , 磁場方位に基づく 姿勢推定を 行う 区間を 限定す べき である こ と を 示し た. その一方で, 姿勢推定が行えない地点には磁場の乱れが存在する こ と を 示し , こ れを 用いて 位置推定を 行う こ と ができ る こ と も 示し た.第
3
章
磁場を 用いたナビゲーショ ン 法
3.1
はじ めに
前章において , 磁場を 実験的に調査する こ と で, 自己位置推定やナビゲーショ ン に利用す
る 方法を 明ら かに し て き た. 本章では, こ れら の調査結果を 基に し て , Rahokら に よ っ て
提案さ れた磁気ナビゲーショ ン 法(magnetic navigation method)[41]の再実装を 行う . 磁気
ナビゲーショ ン 法と は, 磁場の乱れを 目印と し て 位置推定を 行い, かつ磁場を 利用し て 経路 追従の制御を 行う ナビゲーショ ン 法である . 外界セン サと し て磁気セン サのみを 用いる ナビ ゲーショ ン 法であり , 非常にユニーク な手法である . ま た, 次章以降における 本研究の提案 に関し て , 磁気ナビゲーショ ン 法は重要な 性質を 示す. 磁場の乱れを 位置推定に利用する 取組はこ れま でにも 行われて いる . 特に, リ ニアな磁場 地図(走行経路の磁場のみを 地図化し たも の)を 用いて 自己位置推定を 行っ た代表的な例は, Suksakulchaiら やHaverinenら によ っ て 提案さ れた方法である [23, 26]. し かし , リ ニアな 磁場地図を 用いる 場合, 経路以外の磁場を 地図と し て 取得し て いないため, ロ ボッ ト が経路 から 逸脱し た場合に位置推定が行えなく なる 問題がある . そのため, 自律移動を 実現する こ と は容易ではなく , 上記文献において も 自律移動について ま では言及し て いない. ま た, リ
ニアな磁場地図を 用いた更なる 一例と し て, Zhangら は誘拐ロ ボッ ト 問題(kidnapped robot
problem)[42]への対処法を 提案し て いる [43]. し かし こ の手法では, 人が故意にロ ボッ ト を 誘拐し た後に, 再度人がロ ボッ ト を 動かすこ と で同じ 磁場の乱れを 検知さ せる こ と を 前提と し て おり , やはり 自律移動ま では達成し て いな い. 上記の通り , リ ニアな磁場地図を 用いて 自律移動を 実現し た例はなく , 磁気ナビゲーショ ン 法がユニーク な 手法である こ と がわかる . し かし , リ ニア な 磁場地図に 基づく ナビゲー ショ ン は, 数学的なモデルに従い議論する こ と が難し く , 実装方法が経験的な知識に依存す る . こ れはFig. 1.3に示し たよ う に, ロ ボッ ト の状態が走行距離でし か表現さ れて いない場 合に , 2次元平面以上の空間に おいて , ロ ボッ ト の状態を 一意に 決定でき な いためである . そこ で以下では, 前章の磁場の実験的調査に基づいて 磁気ナビゲーショ ン 法の基本コ ン セプ ト と 実装方法を 述べ, 磁場を 用いてど のよ う に自律ナビゲーショ ン を 行う かについて 言及す る . そし て , 実際に屋外環境で動作実験を 行い, その性能を 示す.
3.2 磁気ナビゲーショ ン 法
3.2
磁気ナビゲーショ ン 法
3.2.1
環境磁場を 用いたナビゲーショ ン 法
磁性体が周囲に存在せず, 磁場が乱れて いない地点では, 磁場方位を 用いた姿勢推定が有 効である . し かし 実際の環境では, 鉄骨など の磁性体が磁場を 乱す区間が存在する ため, 姿 勢推定を 行う こ と が困難な区間も 存在する . Rahokら が提案し ている 磁気ナビゲーショ ン 法 では, こ のよ う な磁場の乱れを 利用し て 位置推定を 行う . ま た, それ以外の磁場の安定し て いる 地点では磁場方位を 用いた姿勢修正を 行う . こ れら は, 周囲の動的障害物(磁性体を 除 く)から 影響を 受けないため, 磁気ナビゲーショ ン 法は様々 な環境で利用する こ と ができ る . Fig. 3.1には, 磁場の乱れを 用いた位置推定法の概念図を 示す. 鉄骨など の磁性体は, 残 留磁場(residual magnetism)と 呼ばれる 磁場を 生成する . 残留磁場は磁性体によ り 生成さ れ る ため, 強さ が場所毎に変化し , 時間的には安定する と いう 性質を 持つ[22]. 磁気ナビゲー ショ ン 法では, オド メ ト リ によ る 位置推定の累積誤差を 磁場の乱れを 利用し て 修正する . ま た, 磁場の乱れを 用いた位置推定のみでは正確な経路追従が行え ないため, 磁場方位を 用い た姿勢修正も 行う .Fig. 3.1: Conceptual figure of a localization method based on residual magnetism [40]
3.2.2
磁場地図
ロ ボッ ト の経路は, 移動距離およ び姿勢から リ ニアに表現する こ と ができ る . こ こ でいう リ ニアと は, ループ等を 考慮せずに一次元的に直線的なリ スト と し て表現でき る こ と を 指し て いる . こ の経路情報に基づいて 環境磁場情報M = [m0, m1, ..., mn]T を 記録する こ と で,
3.2 磁気ナビゲーショ ン 法 経路上の磁場について 知る こ と ができ る . こ こ で, nは磁場データ を 記録し た地点(ノ ード) の数であり , mは3軸磁場強度と その磁場方位を 表す. こ こ では, 経路情報に基づいて環境 磁場を 記録し たも のを 磁場地図(magnetic map)と 定義し , こ れを リ ニアな磁場地図と 呼ぶ こ と と し て いる . Fig. 3.2には, 磁場地図を 用いた磁気ナビゲーショ ン 法の実装例を 示す. 経路に沿っ て 磁 場強度を 記録し , 磁場の変化を 識別する . 磁場方位を 用いる こ と で, ロ ボッ ト 自身の姿勢を 利用し なく と も リ ニアな地図表現を 行え る . さ ら に付加情報と し て, 各ノ ード に環境磁場の 性質を 表す情報を 記録する . こ れには, 磁場の乱れのパタ ーン を 識別する ための識別情報s と , 磁場を 制御に利用する 量を 調整する 重み情報wの2種類を 用いる . こ れら を 利用し て 経路周辺の磁場の性質を 把握し , 磁場を ロ ボッ ト の制御に対し て 有効利用する .
Fig. 3.2: Implementation example of the magnetic navigation method [40]
3.2.3
ナビゲーショ ン ア ルゴリ ズム
Fig. 3.3には, 磁気ナビゲーショ ン 法の制御アルゴリ ズム図を 示す. 磁気ナビゲーショ ン 法は, 磁場地図, 位置推定モジュ ールそし て コ ン ト ロ ーラ モジュ ールから 構成さ れる . 磁場 地図は, 自律走行を 行う 事前に作成し て おく . 前述し たよ う に, 磁場地図には経路情報に対 応し た磁場情報と 付加情報が記録さ れて いる . Fig. 3.4には, リ ニアな磁場地図に記録さ れた磁場の乱れを 用いて 自己位置推定を 行う 際 の概略図を 示す. 走行距離に対応し て 磁場強度を 記録する こ と で, 経路上における 磁場の変 化を 識別でき る . 位置推定モジュ ールにおいて , 磁場地図に記録さ れた値Mと 磁気セン サ の観測値mt, およ びエン コ ーダの観測値∆dを 利用し て ロ ボッ ト の状態xを 修正する . な3.2 磁気ナビゲーショ ン 法
Fig. 3.3: Control diagram of the magnetic navigation method [40]
お磁気ナビゲーショ ン 法では, ロ ボッ ト の状態を 走行距離dのみで表すこ と と し て いる .
Fig. 3.4: Conceptual figure of localization based on magnetic fluctuation [40]
し かし 走行距離の修正のみでは, 経路に対する 横方向の誤差が累積する . そこ でこ の誤差 を 修正する ために, 走行経路の左右の磁場地図lM, rM を 利用する . すな わち , Fig. 2.8, 2.10に示す磁場の乱れを 利用する こ と で, 経路に対する 横方向の誤差を 修正する . こ のよ う な, 横方向の誤差修正を 行う こ と ができ る 磁場の乱れが存在する 区間を 識別する ために, 識 別情報sを 利用する . こ の詳細について は後述する . コ ン ト ロ ーラ では, ロ ボッ ト の現在位置に対応し た磁場地図上の磁場情報miと 磁気セン サの観測値mtの差分を 求め, こ れを 零にする よ う な制御を 行う こ と を 基本と し て いる . し かし , 磁場が乱れた地点など でこ のよ う な制御を 行っ た場合, ロ ボッ ト が蛇行する こ と があ る . こ れを 防ぐ ために, 付加情報siと wiを 利用し て 求めた差分を 修正する こ と で, 制御に 利用する 偏差eを 求める . 最終的に, 求めた偏差eの各値が零になる よ う にロ ボッ ト の姿勢

![Fig. 2.6: Investigation results of influence of electronic devices to a magnetic field [40]](https://thumb-ap.123doks.com/thumbv2/123deta/8158390.1271413/25.892.310.621.316.925/fig-investigation-results-influence-electronic-devices-magnetic-field.webp)

![Fig. 3.1: Conceptual figure of a localization method based on residual magnetism [40]](https://thumb-ap.123doks.com/thumbv2/123deta/8158390.1271413/31.892.284.639.619.876/fig-conceptual-figure-localization-method-based-residual-magnetism.webp)
![Fig. 4.5: Magnetic map and sensor readings used in the simulation [47]](https://thumb-ap.123doks.com/thumbv2/123deta/8158390.1271413/51.892.296.632.156.401/fig-magnetic-map-sensor-readings-used-simulation.webp)
![Fig. 4.8: Experimental environment [46]](https://thumb-ap.123doks.com/thumbv2/123deta/8158390.1271413/53.892.303.627.602.902/fig-experimental-environment.webp)
