効果的な交通安全対策立案のための信号交差点安全性
定量評価シュミレーション手法の開発
― 平成 21 年度 タカタ財団助成研究論文集 ISSN 2185-8950 ―
研究実施メンバー
研究代表者
名古屋大学大学院工学研究科教授
中村 英樹
研究協力者
名古屋大学大学院工学研究科助教
浅野 美帆
研究協力者
首都大学東京都市環境科学
研究科教授
大口 敬
研究協力者
秋田大学工学資源学部准教授
浜岡 秀勝
研究支援者
名古屋大学大学院工学研究科研究員 鈴木 一史
目 次
1. _ 研究の概要 ... 1 1.1 研究の背景 ... 1 1.2 研究の目的 ... 1 1.3 本年度の研究内容 ... 1 2. _ わが国の信号交差点設計手法の現状と本研究の位置づけ ... 4 2.1 はじめに ... 4 2.2 信号現示設計におけるインターグリーン時間の位置づけ ... 4 2.3 信号交差点における道路構造およびインターグリーン時間の設計手法の現状 ... 5 2.4 わが国の信号交差点設計手法の現状課題 ... 13 2.5 道路構造およびインターグリーン時間が利用者挙動に及ぼす影響に関する既往研究 ... 15 2.6 本研究の位置づけと仮説 ... 17 2.7 まとめ ... 19 3. _ 調査対象交差点の選定および概要 ... 20 3.1 はじめに ... 20 3.2 調査対象交差点の概要 ... 20 3.3 対象交差点と分析項目との対応関係 ... 25 3.4 車両挙動データの収集方法 ... 27 4. _ 信号切り替わり時の停止/通過挙動の分析 ... 28 4.1 はじめに ... 28 4.2 停止/通過挙動の分析方法 ... 28 4.3 直進車の分析結果 ... 29 4.4 右折車の分析結果 ... 40 4.5 まとめ ... 44 5. _ 信号切り替わり時の発進挙動の分析 ... 45 5.1 はじめに ... 45 5.2 発進挙動の分析方法 ... 45 5.3 分析結果 ... 47 5.4 発進加速度の分析 ... 55 5.5 まとめ ... 56 6. _ 右左折車両の動線の分析 ... 58 6.1 はじめに ... 58 6.2 車両動線の分析方法 ... 586.3 分析結果 ... 60 6.4 右左折走行軌跡への影響要因の分析 ... 63 6.5 右左折走行軌跡のモデル化 ... 65 6.6 まとめ ... 71 7. _ 車両挙動と事故発生との関連分析 ... 73 7.1 はじめに ... 73 7.2 交差点ごとの事故発生状況の比較 ... 73 7.3 交錯点での車両通過特性の分析 ... 77 7.4 まとめ ... 79 8. _ 横断者挙動データの収集および分析 ... 81 8.1 はじめに ... 81 8.2 左折車両と横断歩行者との交錯分析 ... 81 8.3 まとめ ... 85 9. _ 総括 ... 86 参考文献 ... 88 付録 ... 90
1
1. 研究の概要
1.1 研究の背景
現在実施されている交通事故対策の多くは,事故に関する統計的データや現地の道路交通状況を踏まえ, 現場技術者の経験的判断により計画・実施されており,一般に,これら安全対策の効果は事故発生件数に より評価されることが多い.このような事故発生件数に着目した手法では,実施効果の評価に時間がかか ること,事故発生は稀事象であることから信頼性が低いこと,そして何よりも事前評価が難しいという問 題がある.また,たとえ事故として顕在化せずとも,事故の恐れのあるニアミスなどの交錯挙動が多発し ているならば,事故発生件数が少ないからといって安全であるとはいいきれない.より効果的な交通事故 対策を実施していくには,現場技術者が改良効果を事前に的確に見極めることができるよう,交差点改良 効果を科学的・客観的に評価可能な手法が求められる.1.2 研究の目的
そこで本研究では,信号交差点において事故発生と関連性の高い信号切り替わり時の車両や歩行者の駆 け込み進入などの危険挙動,速度変化,軌跡のばらつきなどに着目し,その挙動のばらつきをドライバー の心理的要因をはじめ,交差点の道路構造,信号制御などの道路環境要因から明らかにする.そして,こ れら車両や歩行者の動態を詳細に再現可能なシミュレーションモデルを開発することで,道路構造および 信号制御を変更したときの車両挙動や歩行者挙動の変化を時間的・空間的に再現することにより,交差点 改良代替案の安全性能を事前かつ定量的に評価する手法を構築することを目的とする.1.3 本年度の研究内容
本研究は平成 21 年度から 22 年度までの 2 ヶ年にわたるものであり,本年度(平成 21 年度)はその初年度 である.図 1.1 に示すように,本年度は今後開発するシミュレーションモデルに必要な各種挙動モデル構 築のために,以下に示す基礎的な分析作業を中心に実施する. 1. 調査対象交差点の選定 2. ビデオ観測調査・走行実験 3. 車両挙動データの収集/分析 4. 車両挙動モデルの構築 5. 車両挙動と事故発生との関連分析 6. 歩行者挙動データの収集/分析2 図 1.1 本研究の全体フロー 1.3.1 調査対象交差点の選定 車両や歩行者の挙動データを収集するために必要な調査対象交差点を選定する.本研究では,主として 愛知県名古屋市内の事故多発交差点をはじめとした 10 箇所程度の信号交差点を対象とする.選定に際して は,全体として各交差点の信号サイクル長,黄・全赤時間長,信号制御方式などの信号制御や,交差点規 模,交差角度,停止線位置などの道路構造にバリエーションがみられるよう対象交差点の選定を行う. 1.3.2 ビデオ観測調査・走行実験 選定された対象.交差点においてビデオ撮影調査を行い,車両および歩行者挙動を観測する.ビデオ撮 影調査は,信号切り替わり時の車両挙動が観測できるよう捌け残りが生じるだけの需要が見込めるピーク 時間帯を対象に調査を行う.また,閑散時の車両挙動,歩行者と車両との交錯についても観測できるよう, ピーク時を含む前後 3∼5 時間程度にわたり撮影を行う.また,一部の交差点においては,撮影後に実施す る画像処理による挙動データの精度検証を目的として,GPS 車両挙動計測装置を搭載した車両を用い走行 実験を実施する.なお,ここで撮影されたビデオ映像は来年度の歩行者挙動分析においても使用する. 1.3.3 車両挙動データの収集/分析 撮影されたビデオ映像より車両の走行軌跡を画像処理により抽出することで,信号切り替わり時の車両 挙動について分析を行う.本研究では,1)黄開始時の信号切り替わり時の停止/通過挙動,2)青開始時の発 進挙動,3)右左折車の交差点内走行軌跡といった,信号切り替わり時にクリティカルとなる挙動について ミクロな分析を行う.また,信号切り替わり時の駆け込み進入やフライング発進などの危険挙動の発生状 況についてもマクロ的な分析を行う. 1.3.4 車両挙動モデルの構築 交差点改良時の安全性評価にあたっては,道路構造および信号制御の改良によって生じる安全性に影響 (1) 調査対象交差点の選定 (2) ビデオ観測調査・走行実験 (3) 車両挙動データの収集/分析 (4) 車両挙動モデルの構築 (5) 車両挙動と事故発生との関連分析 (6) 歩行者挙動データの収集/分析 (9) シミュレーションモデルの開発と検証 (7) 歩行者挙動モデルの構築 (10) 交差点事故対策のケーススタディ (8) 安全性能評価手法の検討 平成 21 年度研究内容 歩行者挙動に関する分析 車両挙動に関する分析
3 を及ぼす車両や歩行者の挙動変化を的確に推定できることが求められる.そのためには,道路構造や信号 制御が異なる多数の交差点で観測された車両挙動データを基に,車両挙動へ及ぼす影響要因について明ら かにすることが必要である.そこで,先に収集されたデータより,信号切り替わり時の車両挙動に影響を 及ぼす要因について分析を行う.1)停止選択モデル,2)発進挙動,3)走行軌跡推定モデルの構築を行う.こ こで構築された車両挙動をシミュレーションモデルに組み込むことで,交差点改良時の車両挙動変化を再 現できるようになる. 1.3.5 車両挙動と事故発生との関連分析 事故発生データより当事者別,当事者ごとの事故類型について交差点間で比較を行うことで,交差点の 道路構造および信号制御の実態,および前述の車両挙動分析結果に基づき,各交差点の事故発生状況につ いて考察を行う.今年度では年度ごとの事故発生件数に着目した簡易な分析にとどまるが,この結果は, 安全性能評価指標の検討に際しての基礎資料となる. 1.3.6 歩行者挙動データの収集/分析 歩行者挙動モデル,および車両・歩行者の相互回避行動モデルの構築のための基礎データ収集を実施し, 交差点ごとの左折車と横断者との交錯特性について分析を行う.
4
2. わが国の信号交差点設計手法の現状と本研究の位置づけ
2.1 はじめに
ここでは最初に,わが国の信号現示設計におけるインターグリーン時間(黄+全赤時間)の位置づけにつ いて示した上で,その設定方法,これら信号制御と相互依存の関係にある道路構造の設計指針について整 理する.同時に,いくつかの海外先進国におけるインターグリーン時間設定方法および道路構造の特徴に ついても比較することで,わが国の現状課題を明らかにする.さらに,信号交差点における道路構造およ びインターグリーン時間が車両挙動に及ぼす影響に関する既往研究についてレビューすることで,車両挙 動の時空間変動を考慮した信号交差点設計の必要性について述べる.2.2 信号現示設計におけるインターグリーン時間の位置づけ
わが国における信号制御は,図 2.1 に示す手順で設計されている.まず,現示方式が設定され,交差点 の需要率と損失時間が計算されると,これにもとづいてサイクル長が算定される.サイクル長の設定に際 しては,過大なサイクル長は遅れを増大させ,待ち時間が長くなることによりドライバーや横断歩行者に 苛立ちを生じさせ,危険挙動を誘発させる恐れがあるため,慎重な検討が必要である. 図 2.1 信号表示案の設計手順((社)交通工学研究会,2006) このサイクル長の算定前にインターグリーン時間(黄・全赤時間)の設定が必要となる.改訂交通信号の 手引き((社)交通工学研究会,2006)によると,一般に実用的なサイクル長は次の式(2.1)より計算される. 𝐶 = 𝐿 1 − (𝜆/0.9) (2.1) (1) 交差点交通量の整理と設計交通量の設定 (2) 信号現示の設計 (3) 飽和交通流率の算定 (4) 交差点の需要率の算定 (6) サイクル長の算定 (7) スプリットの算定 (8) 系統制御の検討 (8) 右左折車の処理量のチェック (5) 各現示の黄・全赤時間の設定 右/左折車線の飽和交通流率が サイクル長とスプリットに依 存する場合 最小青時間が確保される ようにサイクル長を調整5 ここで, L:損失時間[s] λ:需要率 式(2.1)より損失時間 L が少ないほどサイクル長は短くて済むことがわかる.わが国では,損失時間は インターグリーン時間(黄時間+全赤時間)と同じか,それよりも 1 秒短いとされている.しかしながら, 損失時間の実測例は少なく,その値の大きさについては明らかになっていない.一般に交差点の信号待ち による総遅れはサイクル長の 2 乗に比例することから,インターグリーン時間中の損失時間の僅かな違い は,信号制御パラメータの設定や実現する交通容量,利用者が被る時間などに大きな影響を与える.損失 時間が生じるインターグリーン時では,同じ黄時間,全赤時間であったとしても,信号制御パターンや交 差点構造によって車両挙動が様々に変化することで,黄・全赤時間の使われ方が異なり,結果として損失 時間も変動しうる.また,インターグリーン時間中はクリティカルな交錯が多数発生する時間でもあるた め,安全面への影響が極めて大きい.インターグリーン時間は後述するように車両の接近速度および交差 点の道路構造と強い関連があり,不適切なインターグリーン時間設定はドライバーに危険挙動を誘発させ, 追突事故や出会い頭事故などの危険性をはらんでいる.したがって,このような小さな差異の積み重ねが 信号交差点の効率性,安全性に極めて大きな影響をもたらすことから,信号交差点設計に際しては,道路 構造要素,信号制御の各要素を慎重に検討することが重要となる. 次節では,わが国におけるインターグリーン時間の設定方法,および関連する信号交差点の道路構造の 設計指針について整理する.
2.3 信号交差点における道路構造およびインターグリーン時間の設計手法の現状
以下では,わが国におけるインターグリーン時間の設定方法,それに関連する信号交差点の道路構造要 素が,どのような指針のもと設計されているかについて整理する.また,海外先進諸国での設計指針とも 比較しながら,わが国の信号交差点における道路構造およびインターグリーン時間の設計手法の現状につ いて論じる. 2.3.1 インターグリーン時間の設定方法 信号の切り替わり時には,それまで通行権を与えられていた交通流を安全かつ円滑に停止させることが 必要である.このために必要な時間がインターグリーン時間であり,黄表示がある場合は黄時間と全赤時 間の合計,黄表示がない場合は全赤時間となるインターグリーン時間の長さはクリアランス時間で決定さ れる.クリアランス時間は原則的に信号現示が切り替わり時の黄表示と全赤表示の合計時間である.以下 に,黄時間と全赤時間の設定方法について述べる. (a) 日本 (1) 黄時間 黄時間は黄表示に直面した車両がその時間内に安全に停止でき,停止できない場合には現在の速度のま ま赤表示開始前までに停止線を通過できるために必要な時間であり,最適黄時間長 Y[s]は次の式(2.2)で与 えられる((社)交通工学研究会,2006). 𝑌 = 𝜏 + 𝑉 2𝑑 (2.2)6 ここで, τ:運転者の反応時間(黄表示開始時からブレーキが効き始めるまでの時間) [s] V:黄表示開始時における車両の接近速度[m/s] d:ブレーキが効き始めてから停止するまでの平均減速度[m/s2] 一般に反応時間τ=0.7[s],平均減速度 d=3.0[m/s2]が使われている.式(2.2)より黄時間長は接近速度によ って決まることがわかる.定式化にあたっては通常の減速度で安全に停止することも,そのまま通過する こともできない領域であるジレンマ・ゾーン,逆に安全に停止することも,そのまま通過することもでき る領域であるオプション・ゾーンがなるべく小さくなるよう考慮されている(図 2.2).黄時間が長すぎる場 合には黄表示に直面しても停止しないドライバーが生じて停止判断タイミングにばらつきが生じることで 追突事故の危険性が高まり,逆に短すぎる場合には停止が困難となることで,黄終了後に交差点進入する 車両が生じやすくなり出会い頭事故の危険性が高まる.一般的には 3∼4 秒の値が採用されており,3 秒や 4 秒という一律の値に設定されている場合が多い.ドライバーにとっては一律の方が理解しやすいが,一 方で,追突事故や出会い頭事故の危険性が高くなる恐れがあることから,交差点ごとの接近速度に見合っ た黄時間を設定するべきといえよう. 図 2.2 ジレンマ・ゾーンとオプション・ゾーン (2) 全赤時間 信号切り替わり時には,黄終了直後に停止線を通過した車両を安全に交差点から一掃するための時間で ある全赤時間が必要となる.わが国の全赤時間は改訂交通信号の手引き((社)交通工学研究会,2006)による と,次の式(2.3)式で計算される. 𝐴𝑅 =𝑊 𝑉 (2.3) ここで, AR:全赤時間[s] V:接近速度[m/s] W:クリアランス距離[m] 𝐿 = 𝜏𝑉 +𝑉 2𝑑 ジレンマ・ゾーン 黄信号開始時の走行位置 X [m] 黄信号開始時の 速 度 オプション・ゾーン 𝐿 = 𝑌𝑉
7 クリアランス距離とは,現示の切り替わり時において,前の現示の車両や歩行者が,次の現示の車両や 歩行者の動線と交錯する位置を通り過ぎるまでに必要な移動距離である.式(2.3)より,全赤時間はクリア ランス距離と接近速度によって決まることがわかる.定式化にあたっては,黄時間中に停止線を越えて交 差点内へ進入することができるものの,全赤表示が終了する前までに交差点を通過し終わることができな い領域であるコンフリクト・ゾーン,赤表示が始まってから停止線を越えて交差点内へ進入しても,全赤 表示が終了するまでに交差点を通過し終わることのできる領域であるエスケープ・ゾーンがなるべく小さ くなるよう考慮されている(図 2.3). 式(2.3)において,わが国では従来まで W として停止線間距離が広く用いられてきた.これは車両と横 断歩行者との交錯を考えてのことであるが,実際には,例えば横断歩道のない交差点や歩車分離制御の交 差点では歩行者との交錯がないため,必ずしも停止線間距離である必要はない.そこで,2006 年に発行さ れた改訂交通信号の手引き((社)交通工学研究会,2006)では,停止線から動線交錯点までの距離をクリアラ ンス距離と定義する概念が取り入れられ,これをベースにクリアランス時間および損失時間を検討すべき ことが詳述されている. 図 2.3 コンフリクト・ゾーンとエスケープ・ゾーン 以上のように黄時間は接近速度によって,全赤時間は接近速度とクリアランス距離によって決まる.こ れらクリアランス時間の実用上の標準値を表 2.1 に示す.標準値は 1 秒単位に丸められ,値の変動を少な くしている.この理由として,黄時間については運転者が実際に黄表示に直面したときに通過するか停止 するかを判断できるためには,黄信号の長さは場所によらず一定であるほうが望ましいとされ,黄時間の 標準値として,接近速度が 60[km/h]程度以上の場合には 4 秒,50[km/h]程度未満の場合には 3 秒という 2 通りの値に限定されている.一方,全赤時間については,これが長すぎると交差側停止車両が待ちきれず に違法なフライングを引き起こしやすくなり,また黄表示に直面しても停止しなくなり,全赤表示開始後 に停止線を越える車両が生じやすくなる. したがって,クリアランス時間の設定に際しては,その信号交差点の安全性および円滑性を大きく左右 することから,交差点の大きさや形状,道路交通条件の実態に合わせて,注意深く慎重に設定する必要が ある.この点については,次節において詳しく議論する. 𝐿 = (𝑌 + 𝐴𝑅)𝑉 − 𝑊 エスケープ・ゾーン 黄信号開始時の走行位置 X [m] 黄信号開始時の 速 度 コンフリクト・ゾーン 𝐿 = 𝑌𝑉 交差点内
8 表 2.1 クリアランス時間の標準値((社)交通工学研究会,2006) クリアランス距離 20 m 30 m 40 m 50 m 60 m 接近速度 [km/h] 黄 全赤 計 黄 全赤 計 黄 全赤 計 黄 全赤 計 黄 全赤 計 30 3 2 5 3 3 6 3 4 7 3 4 7 3 4 7 40 3 2 5 3 3 6 3 3 6 3 4 7 3 4 7 50 3 2 5 3 3 6 3 3 6 3 4 7 3 4 7 60 4 1 5 4 2 6 4 2 6 4 3 7 4 3 7 70 4 1 5 4 2 6 4 2 6 4 3 7 4 3 7 80 4 1 5 4 2 6 4 2 6 4 3 7 4 3 7 (b) ドイツ ドイツの信号制御マニュアル RiLSA(FGSV,2003)によると,ドイツのインターグリーン時間は次の式 (2.4)のように定義されている. 𝑡 = 𝑡 − 𝑡 − 𝑡 (2.4) ここで,tzはインターグリーン時間を表し,tuはわが国の黄時間に相当する.算出に用いる反応時間は 1.0[s],平均減速度は 3.5[m/s2]とわが国の設定値とは若干異なるものの設定に際しての考え方はわが国と同 様である.また,trはクリアランス時間であり,黄終了後に交差点に進入した車両が停止線から交錯点を 通過し終わるのに要する時間を意味し,teは青開始後に交差点に進入した車両が停止線から交錯点まで到 達するのに要する時間を表す(図 2.4).式(2.4)において teを設定式に考慮することで,全赤時間を必要最 小限に設定していることが,ドイツ方式の特徴であるといえる.ドイツの場合,全赤時間の設置時に考慮 される交錯点は,歩行者や路面電車などの全交通手段が含まれる. 図 2.4 ドイツにおける全赤時間の算定方法 交錯点 終了現示側の進入車両 開始現示側の発進車両 𝑡 =𝑆 + 𝐿 𝑉 𝑆 𝐿 𝑆 𝑡 =𝑆 𝑉
9 2.3.2 信号交差点における道路構造の設計方法 信号交差点の安全性と円滑性は信号制御方法によって大きく左右され,交差点の道路構造も制御の方式 によって変化させなければ安全性,円滑性を損ねる恐れがある.したがって,信号交差点の計画設計にあ たっては,交通制御の方法を検討し,それに対応した道路構造とすべきである.道路構造令の解説と運用 ((社)日本道路協会,2004)では,交差点における主な危険要因等と道路幾何構造等における安全確保策との 関係について表 2.2 のようにまとめ,特に安全性確保のため,交差点内および交差点付近の見通しの確保, 付加車線設置による右左折交通の分離,さらには歩行者・自転車のたまり空間の確保,などが重要な事項 と捉えている.このように交差点の道路構造と信号制御は相互依存関係にあるため,それぞれを単独に取 り扱うことはできない.以下では,これらインターグリーン時間設定と関連の強い道路構造の各要素につ いて,海外先進諸国での事例とも比較しながら,その設計指針について整理する. 表 2.2 交差点における危険要因等と道路幾何構造等による安全確保策((社)道路協会,2006) 主な危険要因等 道路幾何構造等による安全性確保策 不適切な交差点形状等による視認性の問題 鋭角交差点や多肢交差となることを回避 くいちがい交差などの変形交差を回避 屈曲部,縦断線形のサグ部およびクレスト部などでの 平面交差点設置等の回避 道路幾何構造と交通特性との間の不整合 単路部の設計速度に適合する道路幾何構造の確保(車 線幅員の確保,単路部と同一の設計速度の採用) 交差点内および交差点付近の視認性の不良 交差点内および交差点付近の見通しの確保(見通しに 配慮し道路線形や歩道の隅切り,橋脚,歩道橋等を計 画) 歩行者と車両相互の視認性に配慮した樹木,植栽,標 識等の配置 不適切な導流化 付加車線設置による右左折交通の分離 交差道路相互の規格や特性に応じた適切な設計車両 の設定 導流島の設置 不必要に大きな隅角半径,導流路幅員の適用を回避 歩行空間,自転車利用空間の機能不足 歩行者,自転車のたまり空間の確保 歩行者のための安全島の設置(二段階横断の実施) 適切な歩道,縁石の切り下げ (a) 信号灯器の配置位置 信号灯器の設置位置については,わが国では 1 流入路に対して 2 面設置,すなわち,流入路に対して左 向こう側と右手前側に灯器が見える形が標準形とされている.また,信号灯器の信号面は交差交通から見 えなくすべきとされている.しかしながら,実際には左向こう側に設置された信号灯器が交差交通からも 視認できてしまう.これにより特に大規模交差点では交差側の信号灯火の状態がわかるのみならず,見通 しが広くなることで交差側の車両挙動についても確認できるため,ドライバーの予見行動を一層助長させ
10 るものとなっている. (a)ドイツ (b)イギリス (c)オーストラリア 図 2.5 海外諸国における信号灯火の配置イメージ (b) 横断歩道の設置位置 横断歩道の設置位置は左折交通量,横断歩行者交通量,歩行者動線等を考慮して決められるべきであり, 一律に設定できるものではない.したがって,横断歩道の設置に際しては,左折導流,交通状況,クリア ランス時間,歩行者動線,勾配や車道との段差等,多面的な検討が必要となる.横断歩道の設置位置が交 差点中心に近すぎる場合には,横断歩行者の横断終了待ちの左折車両によって後続車両が滞留し,渋滞発 生の原因となり,逆に横断歩道の設置位置が交差点中心から遠すぎる場合には,左折車両の走行速度が高 くなることで安全上の問題があるほか,丸青時の右折車にとっては待機スペースが生じて無理な右折を誘 発することで,横断歩行者の右折巻き込み事故の危険性が高まる恐れがある.また,歩行者にとっては大 きく迂回して横断歩道を渡る必要があり,横断歩道上を渡るのではなく,ショートカットして横断する歩 行者が多くなる. 表 2.3 横断歩道計画の原則 ((社)交通工学研究会,2006) 原 則 解 釈 可能な限り,歩行者の自然な流れに合 致させることが必要である. 不自然な迂回を強いるような横断歩道の設置は横断歩道外 横断を誘発するので,交通安全上好ましくない. 横断歩道はできるだけ車道に直角に 設置する. これは,車道の横断距離をできるだけ短くすることによっ て,歩行者の車道横断時間を短縮し,歩行者の安全に寄与 すると同時に,信号制御上,歩行者に割り当てられる現示 秒数を節約し,平面交差の交通処理能力を向上させる. 横断歩道はできるだけ交差点の中心 部に寄せる 横断歩道は,停止線とともに,平面交差の外形を決定する ものであり,交差面積を大きくしないという観点から,で きるだけ交差点の中心部に寄せて設置することが望まし い. 交差区域の拡大は車両が交差点を通過する時間を増加さ せ,信号制御上,クリアランス時間が増大して,交通処理 能力を低下させる.また交差区域の大きい平面交差では,
11 黄信号で交差点に入った「通過残りの車両」と「出いそぎ の歩行者」との間に錯綜を生じるなど,交通処理場好まし くない現象を生じる. 横断歩道は運転者から視認しやすい 位置に設ける. 横断歩道の長さは 15m 以下とするこ とが望ましい. これ以上となるときは中間に交通島を設け,一回の横断距 離を増大させないように配慮する. 横断歩道の幅員は,原則として幹線道 路相互の交差では 4m,細街路相互の 交差では 3m を最小とする. 横断歩道の幅員は,横断歩行者数と,歩行者の横断に割り 当てられる現示時間等を勘案し,当該平面交差の実情に応 じて幅員を変化させることは好ましくない.横断歩道の最 小幅員は,上記とするが,必要に応じて 1m 単位で広くす る (c) 横断歩道の幅員 横断歩道の幅員は原則として幹線道路相互の交差では 4m,細道路相互の交差では 3m を最小とし,歩行 者交通量を勘案し必要に応じて 1m 単位で広くすることができるとされている.しかしながら,交差点ご とに歩行者交通量に応じて幅員を変化させること好ましくないとされ,実態としては歩行者交通量の少な い交差点であっても 4m 近い幅広な横断歩道が設置されていることが多い. 表 2.4 横断歩道設置の指針 ((社)交通工学研究会,2006) 指針 a 取付け部の歩道等との位置関係では,歩道等の延長線上に横断歩道が設けられることが望 ましいが,取付け部の歩道等では,防護柵等の路上施設があり,有効な歩道等の部分が直接 車道に接しているわけではないので,通常の場合,取り付け部の歩車道境界の延長線から最 低 1m を後退させて横断歩道を設置する. 特に,左折車と横断歩行者との交錯が起こりやすい幹線道路相互の平面交差では,左折車 の横断歩行者待ちによる滞留が後続の直進車等の進行を阻害し,平面交差全体の機能を低下 させることの内容,横断歩道を取り付け部の歩道境界の延長線上から 3∼4m 程度後退させる ことが望ましい. このことは,横断待ちの歩行者に安全な待ちスペースを確保し,歩行者の歩道はみ出しを 防止するとともに,歩行者用信号をはじめ,標識・照明・街渠ますなど平面交差の隅角部の 歩道上に設けなければならない施設の設置スペースを取るためにも必要であり,さらに歩行 者の安心感,ゆとりなど心理的な面および落ち着いた行動を支えることにもつながる. b 歩道等巻き込み部には,ボラード(車止め)等を設けるか,スペースが許せば低い植栽等を行 い,隣接する横断歩道間で生じやすい歩行者の信号無視横断や大型自動車等の左折時におけ る巻き込みを防止するとともに,道路の景観を向上させるような配慮をすべきである. c 中央帯がある道路では,分離帯の先端の位置は右折車の走行に支障がないよう,右折導流路 を計算して,その位置を決める.特に Y 型交差などでは右折車による分離帯先端への乗上げ 事故等が発生しやすいので注意を要する.また,この場合,横断歩道の位置は分離帯先端か ら 1∼2m 後退させて設けることが望ましい.
12 (d) 導流路および隅角部 導流路の設計には,その交差点の形状,交角,速度,交通量などの事情を考慮して適切な半径,幅員, 分合流角,位置を選ぶことが重要である.右折用の導流路の場合にも,中央分離帯の形状,開口部寸法を 導流路に従って設計することによって,交通の流れを整え,危険な経路を通らないように制御することが できる.導流路の形を決める要素としては,利用できる用地幅,交差点の形,設計車両,設計速度などが 考えられる.導流路の配置は交通が滑らかに流れるよう設計すべきであるが,とくに都市部においては, 他の制約条件を十分総合的に判断して決めるべきである.交通量に対して導流路の幅を広くとりすぎると 選択の幅が広がり交通流は乱れ,制御が難しくなる. そこで,隅角部の設計に際しては,表 2.5 に示すように交差道路の規格および制御条件から左折の設計 車両と通行方法を求め,導流路の外側半径を決定したのち,表 2.6 より導流路幅員を求めることで導流路 の内側半径を決定する. 表 2.5 交差点における右左折車の通行方法 ((社)交通工学研究会,2006) 道路種別 条件 第 1 種 第 3 種 第 4 種 1 級 2 級 3 級 4 級 5 級 1 級 2 級 3 級 4 級 一時停止制御の場 合 流入部 S4* S4* T4 T4 T4 T1 S4* T4 T4 T1 流出部 主動路 S4* S4* T4 T3 T2 T1 S4* T3 T2 T1 従道路 T3 T3 T2 T1 T2 T2 T1 信号制御の場合 流入部 S4* T4 T4 T4 T1 S4* T4 T4 T1 流出部 S3* T3 T2 T2 T1 S3* T2 T2 T1 S:セミトレーラ連結車,T:普通自動車 (a)S4→S3 (b)T4→T2 (c)T1→T1 図 2.6 交差点の通行方法((社)交通工学研究会,2006) 表 2.6 導流路幅員((社)交通工学研究会,2006) 設計車両 導流路 の外側半径 セミトレーラ連結車 (第 1 種,第 2 種,第 3 種 第 1 級,第 4 種第 1 級) 普通自動車 (その他の道路) 13 以上 14 未満 8.5 5.5 14 15 8.0 15 16 7.5 5.0 16 17 7.0
13 17 19 6.5 19 21 6.0 4.5 21 25 5.5 25 30 5.0 4.0 30 40 4.5 40 60 4.0 3.5 60 3.5 単位:m 大きな隅切り半径で設計された隅角部では,横断歩行者待ちの左折車を隅角部により多く滞留させるこ とはできるが,左折車両が並走したり左折車の速度が上昇したりするなどして交通流に乱れが生じる.こ のような大きな隅角半径を確保できるほどスペースに余裕があれば,左折車線と直進車線の間に交通島を 設けた左折路として導流化を図ることで,停止線の位置をかなり下流側に設置することができるが,わが 国ではこのような交通島は積極的に活用されていないのが現状である. (a)ドイツ (b)イギリス (c)オーストラリア 図 2.7 海外諸国における交差点導流化 以上のように,隅角部の設計に際しては,セミトレーラのような大型車両と横断歩行者の多寡やそれら の挙動特性,さらに交通運用を考慮して過大な設計とならないよう注意深く行う必要がある. (e) 路面標示 交差点内における路面標示には,停止線,右折方法標示,導流標示などがあり,特に交差点内空間が大 きくなりがちな大規模交差点では,交差点内での走行位置の整流化のために指導線を用いることが効果的 といえる.
2.4 わが国の信号交差点設計手法の現状課題
現状のわが国における信号交差点設計手法の現状課題について,特にインターグリーン時間と関連する 項目について整理する.以下のように交差点進入車両の(a)接近速度および右左折時速度,(b)交錯点位置の ばらつき,(c)全赤時間中の駆け込み車両による交差側発進車両への影響の 3 点について整理する. (f) 接近速度および右左折時速度 接近速度は,閑散時の実勢速度または道路の設計速度を目安にすることが一般的とされているが((社)交 通工学研究会,2006),右左折などの転回時には,転回の影響により速度が直進の場合と同一であるとは限14 らず,交差点の形状によっては,これら接近速度の実現値も異なるはずである.交差点において交差する 道路それぞれの設計速度は設定されているものの,交差点内導流路については設計速度の概念は取り入れ られていない.ただし,平面交差の計画と設計応用編((社)交通工学研究会,2006)においては,式(2.4)に 示すように右左折時の走行速度を横滑りの摩擦係数と導流路半径から逆算する方法が紹介されている. 𝑅 = 𝑉 127(𝑖 + 𝑓)⇒ 𝑉 = 𝑅(127(𝑖 + 𝑓)) (2.5) ここで, R:曲線半径 V:走行速度 i:片勾配 f:横滑り摩擦係数 これによると,例えば,交差点における右左折導流路(普通自動車の最小導流路半径 13[m])の走行速度を横 滑り摩擦係数から逆算すると 15[km/h]となる.交差点内の右左折の導流路を設ける場合,特に常時左折可 の導流路等では曲線半径を大きくすることで走行の快適性は上がるが,本来の走行趣旨を考慮して安全性 を重視する必要があるとしている. しかしながら,右左折車両にとって,とりわけ大規模交差点においては交差点内空間が大きいことで車 両の走行位置の自由度が高くなる.それにより曲線半径も車両ごとに異なり,右左折時の速度も大きく変 動すると考えられる. (g) 交錯点位置のばらつき 改訂交通信号の手引き((社)交通工学研究会,2006)では,従来まで停止線間距離としてきたクリアランス 距離を停止線から交錯点までの距離と定義し,これに基づいてクリアランス時間および損失時間を検討す べきことが詳述されている.しかしながら,実際には動線交錯点がどこなのかは設計時にはわからず,設 計段階では静止状態に近いときの設計車両の車両走行軌跡について検討がなされるが,これらの走行軌跡 は交差点進入挙動の実態に応じた走行軌跡ではない.特に交差点規模が大きくなれば,静止状態のときの 走行軌跡とは大きくことなることが予想され,これによる動線交錯点の位置も大きくばらつくと考えられ る.現状では,これら交差点内動線と交差点構造の関連について詳細に分析した研究事例はほとんどなく, 十分な知見が蓄積されていない. (h) 黄時間・全赤時間それぞれの長さがドライバー挙動に及ぼす影響 黄時間が必要以上に長くなれば,停止判断のタイミングがばらつくことで追突事故の危険性が高まる. また,たとえ黄時間が適切に設定されていても,全赤時間が必要以上に長い場合には黄開始時に停止準備 をするドライバーが少なくなり,駆け込み進入車両が増加することで出会い頭事故の危険性が高まる恐れ がある.特に大規模交差点では交差点空間が大きいために高速での駆け込み進入が起こりやすく,出会い 頭事故が発生したときのダメージはさらに高まることとなる.このように,同じ黄時間,全赤時間設定で あっても,それぞれの時間長がインターグリーン時間のなかで異なることによりドライバー挙動も変化す ることが考えられる. (i) 全赤時間中の駆け込み車両による交差側発進車両への影響 通常,信号の青開始時にはドライバーの反応時間が必要であり,それにともなう発進遅れが生じる.ま た,全赤時間が必要以上に長い場合には,全赤時間中の駆け込み進入や青開始前の見きり発進(フライング 発進)を誘発することになる.これら駆け込み進入車両が交差点内で残留する場合には,先の反応時間に加
15 え,交差側発進車両の発進がさらに遅れることとなる.これにより信号切り替わり時の安全性に影響を及 ぼすのみならず,切り替わり時の損失時間にも影響を与えることとなる.インターグリーン時間設計が不 適切な場合には利用者が想定外の挙動をとることでばらつきが生じ,設計時に想定していた車両挙動の前 提条件が崩れることになる. (j) 信号現示の順序がドライバーの発進挙動に及ぼす影響 信号現示の順序により,現示切り替わり時の交錯点位置も変わる.交錯動線がどのような方向からの交 通流の組み合わせかによっても交錯点の特性が大きく異なる.これにより,安全性に及ぼす影響も変化し, さらには損失時間もそれぞれの交錯動線ごとに異なってくる.また,現示順序によってはドライバーの予 見行動を誘発する恐れもあり,前節でも述べた通り,わが国の信号灯火配置や信号無視に対する取り締ま りの関係上,ドライバーの予見行動によるフライング発進は避けられない.このように,前後する現示の 組み合わせによっても,交錯点の位置などが空間的に変化し,損失時間も変化することが考えられること から,これら現示順序に応じたきめ細かいインターグリーン時間設定が求められるが,このような信号現 示順序や制御方法がこれら動線交錯点の特性にどのような影響を与えるかについては十分に明らかになっ ていない. 以上に述べたように,道路構造およびインターグリーン時間は相互依存の関係にあり,車両挙動はそれ ら両者から影響を受けることで,これらが円滑性および安全性に与える影響は大きい.それに対して,現 状の信号交差点の道路構造および設計手法は非常に単純な考え方で設計されており,これら相互依存関係 の影響,それに応じた車両の交差点進入タイミングの時間的な変化や交差点内動線の空間的な変化,その ばらつきなどが考慮されていないといえる.
2.5 道路構造およびインターグリーン時間が利用者挙動に及ぼす影響に関する既往研究
本節では,道路構造およびインターグリーン時間が利用者挙動に及ぼす影響に関する既往研究を(1)イン ターグリーン時挙動に関するもの,(2)交差点構造が及ぼす利用者挙動への影響に関するもの,さらに,(3) 信号制御と交差点構造を変更したときの影響評価に関するものの 3 つに大別して整理する. 2.5.1 インターグリーン時挙動に関する研究 インターグリーン時における信号交差点での停止/通過挙動について分析した研究としては,Mahael and Zaidel (1985)は,事故データからクリアランス時間が長い場合には減速度・残留の両面で安全な設定になっ ていても,相前後する車両が停止か通過かの判断で矛盾する可能性が強く危険性の高いことを示している.Koll and Axhausen (2004)は,オーストラリアで適用されている黄色現示前の青点滅表示の効果について,
黄色現示前の青点滅表示のないドイツ,スイスの都市を含む 10 都市でドライバー挙動の比較分析を行って
いる.その際,ポテンシャルタイムを指標として用いた結果,黄色現示前の青点滅表示があることにより, ポテンシャルタイムが 3[s]程度伸びる,すなわち,ジレンマ・ゾーンを減らし,オプション・ゾーンを増 加させることに寄与することを示している.山田ら(1994)は,クリアランス制御方法の評価のために停止/ 通過選択モデルを構築し,黄開始時の停止線からの距離,速度のほか,先行車の位置および速度により有 意に影響を受けることを明らかにしている.Bonneson and Son (2003)は,赤開始後に交差点に進入した車両 の台数は,交通流率,速度,車群での到着状態に応じて増加することを示し,逆にサイクル長,交差側道 路幅員が長くなると減少することを示している.また,片岡ら(2005)は,片側 2 車線の右折専用レーンが
16 整備された十字信号交差点を対象に,信号切り替わりタイミング,交差点通過・停止の判断結果,対向右 折車の有無,停止線付近の速度の計測のデータを基に分析を行っている.その結果,ジレンマ・ゾーンに 該当した車両は全て通過を選択していたことを明らかにしている. 右折矢後の黄表示に着目した研究としては,島村ら(2001)は,右折矢後の黄色表示の有無について平均 捌け流率,交差点への接近速度の観点から分析を行い,右折矢後の黄表示の間,捌け流率が右折矢表示中 と同程度であり,黄表示が損失時間でないことを示し,また全赤表示中にも高い捌け流率を示したことか ら,この表示方式は安全性の観点から検討が必要であることを示している.また,接近速度に関しては, 右折矢後の黄表示があると一度接近速度が低下する傾向がみられたことから,黄表示が車両の安全停止行 動に寄与していると結論づけている.同様に鈴木ら(2001)は,右折車専用現示表示後の黄表示の車両挙動 に関する効果分析を行った結果,右折車後の黄表示導入により衝突安全度は増大したが,同時に追突の危 険度も増大している可能性が示され,また交差側直進交通の発進損失が減少し,交差側直進交通容量が増 加しているのに対し,右折車の捌け台数がサイクル当たり 2 台程度減少することを示している.これを踏 まえ,黄表示の導入については安全性と円滑性のバランスを慎重に考慮することが必要であるとしている. 浅野ら(2000)は,右折現示クリアランス時の損失時間を実測し,右折クリアランス時間帯の右折車の走行 実態を分析した結果,右折現示のクリアランス時間がほとんど青表示と同様に使われていることを示して いる. 以上のように,インターグリーン開始時(黄開始時)の停止挙動に関する分析事例は多いが,インターグ リーン時において黄表示に続く全赤時間の長さや,現示順序による違いが停止挙動に及ぼす影響について 分析した事例は少ない. 2.5.2 交差点構造が利用者挙動へ及ぼす影響に関する研究 交差点の道路構造が利用者挙動へ及ぼす影響に関する研究としては,鹿田ら(2001)は,車線幅員が 3m よ りも狭くなるにつれ飽和交通流率が低下し,特に大型車は隣接車線の走行車両にも影響を及ぼし,車線幅 員が 3m 以上の車線においても影響が生じることを示している.河合ら(2002)は,実測データを基に転向半 径と転向角度は左折飽和交通流率と高い相関関係があることを示している.また,Fitzpatrick et al. (2006) は,右折専用車線(わが国での左折専用車線)において,転回時の始点および中間地点における走行速度を 隅角部半径,幅員,車線長などの構造条件に応じて推定するモデルを構築している.佐藤ら(2009)は,コ ンパクト化された交差点において,右左折車両の速度,速度変化,通過タイミングなどの走行特性を分析 し,コンパクト化により隅角部が縮小されたことで左折車の速度が低下し,また左折車両の駆け込み割合 が減少することを示している.また,松田ら(2006)は,画像処理技術を用いて右折車両の走行軌跡を多数 抽出し,右折時速度は通常の右折軌跡に比べ,ショートカット軌跡をとる右折車両ほど走行速度が高くな ることを示している. 以上のように,交差点改良時の事前事後評価において,これら道路構造の変更による利用者挙動につい て分析した研究はいくつかみられるが,交差点の道路構造が利用者挙動に及ぼす影響については,十分に 明らかになっていない.さらに,交差点内での利用者挙動に関して車両の走行軌跡をはじめとした詳細な データが収集されることは少なく,交差点内での速度変動や走行軌跡がどのように変化するかについての 知見はみられない. 2.5.3 信号交差点における安全性の評価に関する研究 信号切り替わり時の交差点進入タイミングや走行軌跡のばらつきにより,最適な全赤時間の設定値は常
17 に変化すると考えられる. これら確率的変動を取り扱った研究として,Easa(1993)は,インターグリーン時間設計において接近速 度,反応遅れ,減速度,車長などのパラメータのばらつきを考慮したインターグリーン時間の確率的計算 モデルを提案しており,パラメータのばらつきがインターグリーン時間の長さに及ぼす影響について感度 分析を行っている.また,Liu et al.(2002)は,交差点の交差角,右折車両通過時の加減速,右折走行軌跡の 長さなどに応じてインターグリーン時間を設定する手法を提案している.ここでの走行軌跡の長さは実測 データに基づくものではなく,右折走行軌跡の長さを一定範囲で変化させた場合に算出されるインターグ リーン時間への感度について分析を行っている.Tang and Nakamra(2009)は,インターグリーン時の交錯危 険性をモンテカルロシミュレーションにより評価し,交錯指標である PET の分布のばらつきから,安全性 の評価を行っている.これら既往研究では時間的な変動を考慮しているものの,空間的な変動については 考慮されていない.
これらモデル分析による安全性評価に対して,ミクロシミュレーションにより評価を試みた研究として は,Gettman and Head(2003)はシミュレーション上での交錯指標の算出方法を定義し,既存のミクロシミュ レーションモデルを用いた安全性評価の可能性について検討を行っている.しかしながら,従来までのミ クロシミュレーションモデルでは,車両は与えられたレーン軌道上を 1 次元的に移動し,走行軌跡は道路 幾何構造や信号制御,車両の特性や走行状態に関わらず固定されており,信号切り替わり時に発生しやす い駆け込み進入などの危険挙動が考慮されていないため,信頼性に疑問が残る.また,秋山・奥嶋(2006) は,ビデオ画像観測から得られた交差点内車両軌跡を交通シミュレーションに入力し,事故発生件数を直 接推計している.これらの車両軌跡はランダムに割り当てられており,制御や構造,交通状況に応じて変 化するものではない.
2.6 本研究の位置づけと仮説
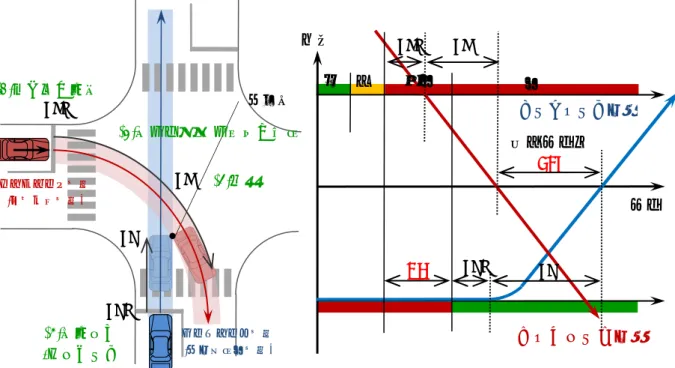
以上のように,既往研究においては信号切り替わり時の単一の車両挙動に着目し分析した事例はみられ るが,信号切り替わり時の停止/通過挙動,交差側先頭車両の発進挙動,さらにはそれら相互の影響といっ た時間的な挙動や,交差点内走行軌跡のような空間的な挙動の変化まで考慮した研究はなされていない. 本研究では,信号切り替わり時のこれら時間的・空間的な車両挙動をモデル化し,交差点改良後の交差点 内挙動を再現可能とすることで,安全性の評価に繋げることを目的としている. 以下では,本研究において想定している信号切り替わり時挙動の仮説について述べるとともに,各章に おいて構築する挙動モデルの各章における位置づけについて述べる. 2.6.1 信号切り替わり時の車両挙動に及ぼす影響要因の仮説 図 2.8 は信号切り替わり時におけるクリアランス車両とエンタリング車両の時間的・空間的な関係を示 したものである.クリアランス車両の走行軌跡とエンタリング車両の走行軌跡の交点が交錯点であり,黄 開始時に停止・通過判断を行ったドライバーは黄終了から Tc’秒後に停止線を通過したのち Tc 秒後に交錯 点に到達する.一方,交差側のエンタリング車両は青開始後,反応遅れを伴って Te’秒後に停止線を通過 し,Te 秒後に交錯点に到達する.18
図 2.8 信号切り替わり時のエンタリング車両およびクリアランス車両の走行図と時間―距離図 このときの交錯点での通過時間差(PET: Post Encroachment Time)は,図より式(2.6)で表される.
𝑃𝐸𝑇 = 𝐴𝑅 − (𝑇 − 𝑇 ) + (𝑇 + 𝑇 ) (2.6) ここで,PET:通過時間差[秒],AR:全赤時間長[秒],Tc’:クリアランス車両が停止線を通過したときの 全赤開始からの経過時間[秒],Tc:クリアランス車両が停止線から交錯点を通過し終えるのに要する時間 [秒],Te’:エンタリング車両が停止線を通過したときの青開始からの経過時間[秒],Te:エンタリング車 両が停止線から交錯点を通過するのに要する時間[秒]である. 交錯点での通過時間差 PET は信号切り替わり時の交錯危険性を表す指標の一つと考えられるが,これはクリ アランス車両の Tc’,Tc,エンタリング車両の Te’,Te,および当該交差点での全赤時間長 AR によって変化し, これらは互いに独立ではなく複雑に影響しあっている(図 2.9).例えば,信号切り替わり時の余裕を考え AR を 延長しても,PET が AR の延長分だけ単調に増加するとは限らない.AR を延長することで,クリアランス車両 のドライバーが全赤開始以降も全赤時間が長いことを見越して駆け込み進入すれば Tc’は正の方向へ長くなり, 一方でエンタリング車両のドライバーは,全赤時間が長いことで待ちきれずに青開始前に発進することで,Te’ は負の方向へ短くなると考えられる.これにより全赤時間の延長分が相殺されることで,PET は全赤時間延長 前と変わらないことも起こりうる.したがって,全赤時間長の延長は必ずしも安全性の向上に寄与するとは限 らず,逆にドライバーの危険挙動を誘発することで,危険性を高めてしまうことにもなりかねない. 図 2.9 において,これら各時間要素に影響を与える駆け込み進入,走行軌跡/走行速度の変動,発進遅れ/フラ イングなどの車両挙動は,信号切り替わり時におけるクリアランス車両の停止/通過判断,エンタリング車両の 発進判断によって生じ,交差点の道路構造,信号制御に応じて時間的・空間的に変化する.したがって,交差 点改良により道路構造を変更した場合には,車両挙動が変化することで交錯点での通過時間差も変化すること になり,必要な全赤時間長もまた変化するものと考えられる.とりわけ不適切な全赤時間設定は危険挙動を誘 発させることで,安全性の低下をもたらすことから,交差点改良にともなう車両挙動の時間的,空間的な変化 AR Te Tc 通過時間差 PET クリアランス車両 エンタリング車両 Tc 黄 全赤 赤 青 Te 距離 時間 クリアランス車両 (最終右折車両) エンタリング車両 (交差側直進車両) (2)走行軌跡/走行速度の変動 (4)発進遅れ /フライング (1)駆け込み進入 (3)残留 Tc Te Te Tc 交錯点
19 を考慮することは,安全上重要なことであるといえる.それには,信号切り替わり時の車両挙動と道路構造, 信号制御との関連について分析することで影響要因を明らかにし,時間的・空間的な車両挙動の変化を再現可 能なモデルを構築することが必要となる. 図 2.9 通過時間差 PET と各時間要素および道路構造,信号制御との関連の仮説
2.7 まとめ
本章では,わが国におけるインターグリーン時間の設定方法と,これと相互依存の関係にある道路構造 の現状について国際的に比較し課題整理するとともに,信号交差点構造およびインターグリーン時間が車 両挙動に及ぼす影響についての既往研究をレビューすることで,車両挙動の時空間変動を考慮可能な交差 点性能評価手法の開発が必要であることを述べた.これを踏まえ,本研究では,信号切り替わり時におけ る交錯車両の停止線通過挙動および交差点内走行軌跡について分析を行い,これら車両挙動に及ぼす信号 制御,道路構造,さらには交錯車両との影響関係について考察する.PET=AR ‒ (Tc +Tc)+(Te +Te)
(1)駆け込み進入 (2)走行軌跡/走行速度の変動 (4)発進遅れ/フライング (3)駆け込み車両の残留 道路構造 (交差角度,隅角部,停止線位置など) 信号制御 (インターグリーン時間,制御方式) 停止/通過判断 交差点内走行(右左折) 発進判断
20
3. 調査対象交差点の選定および概要
3.1 はじめに
本研究では,道路構造および信号制御などがドライバーや歩行者などの利用者挙動に及ぼす影響につい て分析するために,これらが異なる多数の信号交差点においてビデオ観測調査を行う必要がある.そこで, 以下に示す条件を満たす信号交差点を愛知県名古屋市内において選定した. 調査対象交差点の選定条件 ・典型的な 4 現示または矢印専用現示により制御が行われていること ・信号切り替わり時に捌け残りが生じる程度の交通需要があること ・付近に高所からの撮影が可能な高層建築物が存在すること ・全体として交差点ごとの道路構造および信号制御にバリエーションがあること3.2 調査対象交差点の概要
上述に示した選定条件を満たす信号交差点として,9 箇所の信号交差点が調査対象交差点として挙げら れた.これらの調査日時,信号制御,交差点サイズ等の概要について表 3.1 に示す. 表 3.1 調査対象交差点 交差点名 調査日時 信号制御方式 信号サイクル長[秒] 停止線間距離[m] (東西×南北) 西大須 2008 年 1 月 18 日 9:00∼12:30 単純 4 現示制御 160 81×76 末盛通 2 2008 年 11 月 18 日 9:00∼12:00 140 58×60 地下鉄堀田 2009 年 6 月 18 日 9:00∼10:30 160 81×42 川名 2008 年 12 月 1 日 7:30∼10:30 150 66×64 太閤通 3 2009 年 10 月 13 7:30∼10:30 150∼165 76×57 砂田橋 2008 年 6 月 27 日 7:30∼11:00 120∼150 53×30 広路通 1 2010 年 2 月 24 日 7:00∼10:00 110, 120 39×50 桜山 2008 年 12 月 4 日 7:20∼10:20 矢印制御* 140 65×64 熱田神宮南 2009 年 7 月 21 日 7:00∼12:00 153∼160 50×50 * 桜山交差点は南北方向のみ矢印制御 本研究では,ビデオ撮影による外部観測により車両の走行位置の時間変化を軌跡データとして収集する21 ことで,信号切り替わり時の車両挙動データを収集する.道路構造,信号制御が車両挙動に及ぼす影響に ついて分析するため,これらが異なる複数の交差点においてビデオ観測調査を実施した.調査はいずれの 交差点もピーク時間帯を含む前後 3 時間にわたり,交差点サイズが異なり,典型的な 4 現示制御,または 矢印制御が行われている複数の交差点において実施した.交差点内部および交差点流出入部での挙動につ いても観測できるよう,かつ高所から観測できるよう複数箇所の高層建築物よりビデオ撮影調査を実施し ている.なお,これら対象交差点には,名古屋大学中村英樹研究室において過去に観測調査が実施された 箇所も含まれている.以下に,調査対象交差点の写真および概要,信号現示パターン,事故発生状況等に ついて示す. 3.2.1 交差点写真および概要 各交差点の写真および概要について以下に示す. (a) 西大須 国道 19 号線と市道が交差する交差点であり,交通量 は昼夜を問わず非常に多い 付近には娯楽施設や商店街が立地しており,歩行者, 自転車利用者が多く,特に横断歩道上での右左折車 両との交通事故が多発 交差点サイズが大規模であり,右左折車両が高い速 度のまま横断者間を縫うように走行しがちであり, 接触直前のニアミスが起こりやすい (b) 末盛通 2 幹線道路と県道が交差しており,交通量は朝夕のピ ーク時には幹線道路側の東西方向で非常に多い 東側および南側の流入部で右折需要が特に高い 西側流入部は下り勾配になっており,信号切り替わ り時の高速での駆け込み進入が多くみられる (c) 地下鉄堀田 主要幹線道路である 2 本の県道が交差する交差点で あり,交通量は南北方向において非常に多い 付近には地下鉄の出入口が存在するため,歩行者・ 自転車利用者が多い
22 (d) 川名 県道と市道が交差する交差点であり,交通量は非常 に多い 交差点のすぐ脇に地下鉄川名駅の出入口が設置され ており,また付近には複数の学校が存在するため朝 夕は歩行者が多い 変形交差点であり,隅角部が大きくなりがちである ため,停止線位置は大きく後退している (e) 太閤通 3 県道と市道が交差しており,交通量は非常に多い 渋滞が発生しやすいことから追突事故が多発 地下鉄中村区役所駅の出入り口があり,周囲には区 役所,病院,商店街があるため,歩行者や自転車利 用者による道路横断が多く,車両の右左折時の歩行 者との交通事故が多発 本交差点では過去に交差点改良が行われており,左 折車両に対する注意喚起のために左折導流路にマー キングが施されている (f) 砂田橋 県道と市道が交差する交差点 朝夕の通勤・通学利用者や付近の大規模ショッピン グセンターへの買い物客らで,交通量は非常に多く 渋滞が発生しやすい 自転車横断帯のみ設置されており,歩行者は歩道橋 を利用 (g) 広路通 1 4 車線と 2 車線の市道が交差する比較的小規模な交 差点であり,交通量は朝夕において多い 付近に学校が複数存在するため,通学目的の歩行 者・自転車が多い 南北方向の停止線が大きく後退している
23 (h) 桜山 幹線道路と県道が交差する交差点であり,交通量は 南北の幹線道路で非常に多い 隅角部に地下鉄桜山駅の出入口が設置されており, 付近には大学,病院,郵便局があるため,歩行者や 自転車利用者が多い 南北方向のみ矢印制御により歩車分離,右直分離が 行われている (i) 熱田神宮南 国道 1 号と国道 19 号が交差する非常に大規模な交差 点であり,交通量は昼夜を問わず非常に多い 変形交差点であり東西方向の左折は導流化により常 時左折可となっている 横断歩道,自転車横断帯ともに設置されていないた め停止線のセットバック量が小さく,大規模である にも関わらず比較的コンパクトな交差点である 矢印制御により右直分離が行われている 3.2.2 信号現示 各交差点の信号現示パターン,スプリット,サイクル長等について表 3.2 に示す. 表 3.2 対象交差点の信号現示 交差点名 現示 φ1 φ2 φ3 φ4 φ5 備 考 西大須 パターン 時間長[秒] 青 52 7 67 12 黄 4 2 4 2 全赤 5 5 サイクル [秒] 160 末盛通 2 パターン 時間長[秒] 青 57 11 39 13 黄 3 2 3 2 全赤 5 5 サイクル [秒] 140
24 地下鉄堀田 パターン 時間長[秒] 青 54 11 69 10 黄 4 3 全赤 5 4 サイクル [秒] 160 川名 パターン 時間長[秒] 青 50 14 53 11 黄 4 2 4 2 全赤 5 5 サイクル [秒] 150 太閤通 3 パターン 右 折 交 通 需 要 に 応 じ て 青 時 間 長 が変化 時間長[秒] 青 50 11 61 17 黄 4 2 3 2 全赤 5 5 サイクル [秒] 151∼165 砂田橋 パターン 時間長[秒] 青 38 8 63 21 黄 4 2 3 2 全赤 5 4 サイクル [秒] 広路通 1 パターン 9:05 まではサイ クル長 120 秒,そ れ以降は 110 秒 時間長[秒] 青 55 9 32 7 黄 3 2 3 2 全赤 3 4 サイクル [秒] 110,120※ 桜山 パターン 時間長[秒] 青 41 11 31 22 11 黄 3 2 3 3 2
25 全赤 5 3 5 サイクル [秒] 140 熱田神宮南 パターン 交 通 需 要 に 応 じ て 青 時 間 長 が 変 化 時間長[秒] 青 43 30 42 15 黄 3 3 3 3 全赤 4 4 5 5 サイクル [秒] 153∼160 3.2.3 事故発生状況 各交差点の 2004 年度から 2009 年度までの事故類型ごとの事故発生件数の累計値を表 3.3 に示す.2009 年度分については,2010 年 2 月までのデータとなっている.なお,これら事故データの原票データについ ては付録を参照されたい. 表 3.3 対象交差点の事故発生件数(2004∼2009 年度までの累計値) 事故類型 自動車相互 歩行者×車両 自転車×車両 二輪×車両 車両単独 総計 交差点名 追突 出会い頭 右左折 その他 横断中 ( 横断歩道 ) 横断中 ( その他 ) 背対面 その他 追突 出会い頭 右左折 その他 追突 出会い頭 右左折 その他 西大須 34 1 8 4 9 0 0 0 0 4 46 3 0 0 5 1 1 116 末盛通 2 24 0 9 4 4 0 0 0 0 2 14 0 0 0 5 2 4 68 地下鉄堀田 32 5 8 5 2 0 0 0 0 2 15 1 0 0 6 3 2 81 川名 16 1 0 2 1 0 0 0 0 0 11 0 0 0 0 1 0 32 太閤通 3 17 3 7 2 4 3 0 1 0 4 33 0 1 0 0 0 1 76 砂田橋 13 0 9 4 0 0 0 1 0 1 6 2 0 0 0 2 2 40 広路通 1 7 2 0 1 1 0 0 0 0 2 6 1 0 0 3 1 0 24 桜山 15 0 4 0 4 0 0 0 0 1 2 2 0 1 2 1 0 32 熱田神宮南 46 7 6 2 0 0 0 0 0 1 1 0 2 1 4 0 0 70 データ提供:愛知県警
3.3 対象交差点と分析項目との対応関係
本研究において車両挙動,歩行者挙動の分析に使用した対象交差点および流入部の組み合わせを表 3.4 に示す.ビデオ撮影時の撮影場所の制約,アングル等により観測ができない場合や,画角が浅いために車 両挙動データの精度が低下する恐れのある流入部については分析対象から外している.なお,来年度以降 においても必要に応じてビデオ観測調査を実施する.26 表 3.4 分析項目と調査対象交差点の対応関係 交差点名 分析時間帯 (撮影時間帯) 対象流入部 分 析 項 目 備 考 車両挙動 歩行者挙動 発進挙動 停止/通過挙動 交差点内軌跡 直進 右折 直進 右折 左折 右折 西大須 9:00∼12:00 (8:45∼12:30) 東 ● ● ● ● 西 ● ● ● ● ● ● 南 北 ● ● ● ● ● 桜山 7:20∼10:20 東 西 ● 南 ● 北 ● ● 末盛通 2 9:00∼12:00 東 ● ● ● ● ● ● ● 西 ● ● ● ● ● 南 ● ● ● 北 ● ● ● ● ● 川名 7:20∼10:20 東 西 ● ● 南 北 ● 砂田橋 7:00∼11:00 東 西 ● ● ● 南 ● ● 北 ● 熱田神宮南 7:00∼10:00 (7:00∼12:00) 東 ● ● 西 ● ● ● ● 南 ● ● ● ● ● 北 ● ● ● ● ● 太閤通 3 7:20∼10:20 東 西 ● ● ● ● ● ● 南 ● ● ● ● ● ● 北 ● ● ● ● ● 地下鉄堀田 7:00∼10:00 東 ● 西 南 ● ● 北 広路通 1 7:00∼10:00 東 ● ● 西 ● ● 南 ● ● ● 北 ● 凡例: ● 分析に使用
27
3.4 車両挙動データの収集方法
車両挙動データの収集に際しては,図 3.1 に示す名古屋大学中村研究室において開発された専用のビデ オ画像処理システムを用いた.本システムにより複数のビデオカメラからの観測軌跡を統合するとともに, カルマンスムージングアルゴリズムに基づき観測誤差の補正および補間推定を行っている.また,本研究 では右左折走行軌跡を取り扱うが,右左折転回時には内輪差の影響を受けるため,個々の車両ごとに車両 形状をあてはめ,これを基に車両形状と回転を考慮することで推定される重心位置のデータを用いている. 図 3.2 にこれら観測イメージを示す. 図 3.1 画像処理システムによる車両挙動の観測イメージ (a) 車両形状を考慮した走行軌跡の観測 (b) 信号切り替わり時の交錯事象の抽出 図 3.2 走行軌跡観測および交錯抽出のイメージ28