干渉する 2 孤立波の反射・越波特性に 関する実験的研究
首都大学東京大学院 都市環境科学研究科 都市基盤環境学域 海岸・海洋工学研究室
学修番号 18851526 宮下 大輝
指導教員 横山 勝英 教授
1.1 研究背景および目的... 1
1.2 孤立波研究の歴史... 2
1.3 本論文の構成... 3
第
2章 孤立波の理論式の導出... 4
2.1 孤立波理論... 4
2.2 孤立波の越波量... 7
第
3章 研究方法 ... 8
3.1 実験水槽... 8
3.2 孤立波の造波... 10
3.2.1 造波の流れ ... 10
3.2.2 造波板変位データの作成 ... 13
3.3 防波堤(直立壁)... 16
3.4 計測方法... 18
3.4.1 可視化画像計測 ... 18
3.4.2 水面形計測 ... 23
3.4.3 流速計測 ... 25
3.4.4 越波量計測 ... 26
3.5 解析手法... 27
3.5.1 水面形抽出法 ... 27
3.5.2 オプティカルフロー ... 28
3.6 実験条件... 33
第
4章 2 孤立波の干渉(追越衝突現象)... 35
4.1 水面形の時間変化、空間波形... 35
4.2 水粒子速度の時間変化... 42
5.2.1 伝達波 ... 54
5.2.2 越波量 ... 60
第
6章 結論 ... 63
参考文献 ... 65
1
第1章 序論
1.1 研究背景および目的
孤立波(Solitary wave)とは、谷を持たず単一の峰を持ち、波形と波速を変えずに伝播 する非線形波である。複数の孤立波が衝突した場合には、衝突後一定時間経過すると、
それぞれの波形、波速は初期状態に回復する性質を持つ。自然現象では、沿岸域の津波 を孤立波の一種として扱うこともできる。津波は、湾や島しょの影響により回析・反射 が生ずるため、複数の孤立波(津波)が干渉する可能性も十分考えられる。
干渉する孤立波に関する研究は、物理・数学分野において多く進められ、単独波との 特性の違いについて議論されている。孤立波の干渉には
2つの種類がある。1 つは異方 向に進行する波同士が干渉する正面衝突現象であり、もう
1つは同方向に進行する波が 干渉する追越衝突現象である。追越衝突現象の方が、文献が少なく、波形変化・位相な ど未解明な部分が多い。そこで本研究では、追越衝突現象を取り扱う。
追越衝突現象とは、先行する波高の小さい波(第
1波)に、後続する波高の大きい波(第
2波)が追いつき、干渉し、追い抜いてゆく現象である。孤立波の波速(波そのものが進 む速さ)は、波高に依存するため、第
2波の波高が、第
1波の波高より大きい場合、こ のような現象が発生する。追越衝突現象では、第
2波が第
1波に接近すると波高が徐々 に下がり、
1つの塊となる。波高は追越の瞬間に最小となる。その後、徐々に波高が上が り、元の
2つの孤立波の波形に戻る。
しかし、干渉に関する既往の理論的・実験的研究においては、静水面上を伝播する波 を取り扱っており、壁や構造物にぶつかる際の知見はない。さらに、海岸防災の観点か ら津波の影響を考えるとき、すべて単独の孤立波を用いて行われており、干渉する孤立 波の影響は考慮されておらず、干渉波の越波・反射特性についても分かっていない。
そこで、本研究では、干渉する孤立波の影響を考慮するための基礎的段階として、追
越衝突現象の理解を深めるとともに、その干渉が防波堤での反射・越波特性に与える影
響を実験的に明らかにすることを目的とする。
2
1.2 孤立波研究の歴史
孤立波に関する研究は、Scott-Russell(1834)が発見した谷を持たない単一峰の波により 始まる。彼は、エジンバラ郊外の運河を馬に乗って散歩をしていた際、運河で急停止し た船の先端の水面が大きく持ち上がり、それが
1つの塊となって動き出すのを目撃した。
彼は馬でその波を追いながら観察をした。その波は、形と速度を変えることなく長い距 離を進行していった。その後、彼は家に実験用水槽を作成し、さまざまな実験を行い、
孤立波の存在を確かめた。孤立波の波速は、波高が大きくなるほど大きくなることは彼 の発見の一つである。
その後、Boussinesq(1871)、Rayleigh(1876)により、理論的研究が盛んに行われた。
McCowan(1891)は、波形、有効波長、水粒子速度などを定式化した。
Korteweg&De Vries(1895)は、Boussinesq
の理論を拡張し、孤立波の解を表す非線形偏微 分方程式を導出した。その方程式は、彼らの名前をとって
KdV方程式と呼ばれ、孤立波 のほかにも、電磁は、プラズマ、ソリトンなどの非線形分散波の解析の発展につながっ た。その後、Grimshaw(1971)は摂動法を用いて、3 次オーダーの孤立波の水面形、波速、
水粒子速度などの理論式を導いた。
複数の孤立波の干渉に関する研究も多く行われてきた。以下に代表的な研究をいくつ か取り上げる。Lax(1969)は、数値計算を行い、孤立波の追越衝突時の波形変化は、2 波 の波高比により、
3つのタイプに分かれることを明らかにした。また、
Su&Mirie(1980)は、摂動法を用いて、正面衝突時に最大波高が
2波の足し合わせより大きくなり、位相の変 化が生じるという結果を解析学的に得た。これらの解析結果は、Maxworthy(1976)、
Weidman(1978)は、実験的研究の結果と一致した。これらのことから、孤立波の追越衝突
時の干渉は、単純な
2波の足し合わせではなく、非線形な挙動をすることが明らかとな った。Craig ら(2006)は、擬似スペクトル法を用いた数値計算を行い、追越衝突時の最大 波高の変化を明らかにした。
近年では、境界要素法を用いた理論的研究や
PIVによる実験的研究などが行われてい る。また、実海域での海流や川の流れの影響を考慮して、流れ場が追越衝突現象に及ぼ す影響については、Umeyama(2019)や宮下(2018)などがある。
また、Hammack(1974)は実験室での孤立波の生成方法と津波の発生方法が似ているこ とから、津波伝搬の工学的問題にも関連すると述べ、その後、工学分野(土木分野など)
でも研究が行われるようになった。
3
1.3 本論文の構成
本論文の構成を以下に示す。
第
1章では、本研究の背景と目的を述べた。
第
2章では、孤立波に関する理論式をまとめた。孤立波理論では、波形、波速、水粒 子速度に関する理論式を示した。また、越波量に関しては、算出式を示すとともに、導 出過程を述べた。
第
3章では、研究方法をまとめた。初めに、実験装置や周辺機器の概要を述べた。次 に、計測に用いた機器や計測方法について示した。最後に解析手法について、手法の概 要や選定方法を述べた。
第
4章では、2 つの孤立波の追越衝突現象に関する実験結果をまとめた。単独孤立波 の水面形、空間波形と水粒子速度の時間変化は既存の理論との比較し、実験・解析の正 確性を確かめた。そして、干渉する孤立波と単独波の結果を比較し、干渉波の特性につ いて考察を行った。
第
5章では、干渉する
2孤立波の反射・越波特性に関する実験結果をまとめた。既往 の理論や実験との比較し、本実験の妥当性を確かめるとともに、単独波と干渉する孤立 波の実験結果の比較を行い、反射・越波特性について考察を述べた。
第
6章では、本論文の研究内容、成果を総括するとともに今後の展望について述べた。
4
第2章 孤立波の理論式の導出
2.1 孤立波理論
初めに、図 2.1 に示す
2次元座標系(x,z)を与える。ここで、a は波高、h は水深、η は 水面変位である。波は、x の正の方向に波速
cで伝播しているとする。
図 2.1 座標系
ここでは、まず
Boussinesq(1871)が示した1次オーダーの孤立波の水面形、波速、水粒子 速度の式を記す。
水面形:
𝜂(𝑥, 𝑡) = H sech2(√3𝑎
4ℎ3(𝑥 − 𝑥0− 𝑐𝑡)) (2.1)
ここで、𝑥
0は孤立波の峰の初期位置である。
波速:
𝑐 = √𝑔(𝑎 + ℎ) (2.2)
水粒子速度(水平成分) :
𝑢√𝑔ℎ= 𝜀 [𝜂∗−1
4𝜀𝜂∗2+ ℎ2
3𝑐2(1 −3 2
𝑧2 ℎ2)𝜕2𝜂∗
𝜕𝑡2] (2.3)
水粒子速度(鉛直分布) :
𝑤√𝑔ℎ= 𝑧𝜀
𝑐[(1 −1
2𝜀𝜂∗)𝜕𝜂∗
𝜕𝑡 + ℎ2
3𝑐2(1 −1 2
𝑧2 ℎ2)𝜕3𝜂∗
𝜕𝑡3] (2.4)
ここで、𝜂
∗ = 𝜂/ℎである。波の進行方向
5
また、
𝜕𝜂∗
𝜕𝑡 =
2𝑐√3𝑎
4ℎ3sinh (√3𝑎 4ℎ3x′) cosh3(√3𝑎
4ℎ3x′)
(2.5)
𝜕2𝜂∗
𝜕𝑡2 = 𝑐23
2 𝑎
ℎ3[2cosh2(√3𝑎
4ℎ3x′) − 3]
cosh4(√3𝑎 4ℎ3x′)
(2.6)
𝜕3𝜂∗
𝜕𝑡3 = 6𝑐3 𝑎
ℎ3√ 3𝑎
4ℎ3sinh (√3𝑎
4ℎ3x′) [cosh2(√3𝑎
4ℎ3x′) − 3]
cosh5(√3𝑎 4ℎ3x′)
(2.7)
ここで、x
′= 𝑥 − 𝑥0− 𝑐𝑡である。次に、Grimshaw(1971)による
3次オーダーの孤立波の水面形、波速、水粒子速度の式を 記す。
水面形:
η
h= εs2−3
4ε2s2t2+ ε3(5
8s2t2−101
80 s4t2) (2.8)
波速:
c = √gh (1 + ε − 1
20ε2− 3 70ε3)
1
2 (2.9)
水粒子速度(水平成分) :
u√gh= εs2− ε2[−1
4s2+ s4+ (z h)
2
(3 2s2−9
4s4)]
− ε3[19 4 s2+1
5s4−6
5s6+ (z h)
2
(−3
2s2−15
4 s4+15 2 s6) + (z
h)
4
(−3
8s2+45
16s4−45 16s6)]
(2.10)
水粒子速度(鉛直分布) :
w√gh= (3ε)12(z
h) t [−εs2+ ε2[3
8s2+ 2s4+ (z h)
2
(1 2s2−3
2s4)]
+ ε3[49
640s2−17
20s4−18 5 s6+ (z
h)
2
(−13
16s2−25
16s4+15 2 s6) + (z
h)
4
(− 3 40s2+9
8s4−27 16s6)]]
(2.11)
6
ここで、
α = (3 4ε)
1 2(1 −5
8ε + 71 128ε2) s = sech(αx′)
t = tanh(αx′)
である。
7
2.2 孤立波の越波量
近藤ら(1964)による越波量算定式を記す。ここで、a は波高、h は水深、hc は初期水面 からの壁高である。
図 2.2 座標系
壁高より高い孤立波の容積を
V’は以下のようになる。V′
=
∫ ηdx − 2𝑥𝑒ℎ𝑐𝑥𝑒
−𝑥𝑒
= 4
√3𝑎12ℎ32{(1 −ℎ𝑐 𝑎)
1 2−ℎ𝑐
𝑎 sech−1(ℎ𝑐 𝑎)
1 2}
(2.12)
ここで、η は
Boussinesq(1871)式(2.12)を用いた。
孤立波の全容積(V
0)は式(2.12)で(hc/a)=0と置いて得られる。
V0
=
4√3𝑎12ℎ32 (2.13)
これより、V’と
V0の比は以下のようになる。
𝑉′
𝑉0
=
(1 −ℎ𝑐 𝑎)1 2−ℎ𝑐
𝑎 sech−1(ℎ𝑐 𝑎)
1
2 (2.14)
すなわち孤立波の全容積(V
0)と
hc以上の容積(V’)との容積比(V’/V
0)は、相対 天端高(hc/a)のみの関数として与えられる。ここで、堤体を超える越波量(Q)は
V’の一部と考える。実験の結果、Q は
V’の約1/2であると示している。
𝑄 𝑉0
=
12(1 −ℎ𝑐 𝑎)
1 2−ℎ𝑐
𝑎 sech−1(ℎ𝑐 𝑎)
1
2 (2.15)
𝑥𝑒
−𝑥𝑒
8
第3章 研究方法
3.1 実験水槽
実験は、長さ
26.0m、幅0.5m、高さ0.8mの二次元造波水槽を用いて行った。 (図 3.1、
図 3.2)
水槽の一方の端には、パドル式造波板(図 3.3)が装備されている。造波板を水平に動 かすことにより造波を行う。造波方法については、次の節で詳細に述べる。
水槽の他端には、消波板(図 3.4)が設置されている。造波された波は、水槽端部で反 射を繰り返し、一定の時間が経過するまで水槽内に残り続けることになる。そこで、消 波板により波の反射を抑え、静水状態をできるだけ早く戻し、実験をスムーズに行える ようにした。
図 3.1 実験水槽(概要図)
図 3.2 実験水槽
9
図 3.3 パドル式造波板
図 3.4 消波板
10
3.2 孤立波の造波
3.2.1 造波の流れ
本研究で使用する造波装置は、造波板を水平方向に動かすことで、波を造ることがで きる。波の進行方向と同じ方向に造波板を動かすと、峰を持った波ができ、逆の方向に 動かすと、谷をもった波ができる。本研究で対象としている孤立波は、造波板を双曲線 関数
tanhを含む関数形 (3.2.2 参照) に従って水平に振動させることにより造波を行う。
単波(1 波)の場合は一度だけ造波板を動かす。また、孤立波の追越衝突時には、
2つの 波を造る必要がある。そのときは、まず単波を造る時と同様に
1波目を造波して、造波 板を一旦停止させ、一定の時間間隔をおいて、再度造波板を動かすことで
2波目を造波 する。以下に造波の手順を簡単に示す。時間間隔を変えることで、衝突位置を調整し、
計測位置で衝突するようにする。
以下、造波の流れを示す。
① 造波板の変位データを
PCにて作成する。(3.2.2 参照)
②
PCにて、津波制御ソフトウェア「Tsunami7」を起動し、①で作成したファイルを 開く。 ([任意波形]→[参照]→対象のファイルを選択する。 )
③ 実験中立位置(造波開始位置)に造波板を移動させる。実験中立位置の初期値は、
0.000[cm]になっているので、本実験では、そのまま使用する。
([中立位置移動]→[制御開始])
④ 孤立波を造波する。 ([造波開始])
→次に同じ実験をする場合…[中立位置移動]
→次に違う実験をする場合…[実験終了]→[別の実験を行う]
→実験を終了する場合…[実験終了]→[造波板を機械中立位置に戻して、アプリケーション を終了する]
図 3.5
Tsunami7(ファイル選択時)11
図 3.6
Tsunami7(実験中立位置への移動時)以下では、孤立波の造波に用いた機器や装置の説明を行う。
① 二次元波動水槽用造波システム
造波システムは、 「パドル式造波板」と「造波装置制御盤」 (図 3.7)の
2つより構成 されている。
造波装置制御盤は、造波板に直立板の変位信号を送るためのものである。送信方法 は、
PCからのデータを送信する方法と操作盤についているタッチパネルの
2つの方法 がある。今回は、PC から送信する方法を使用した。
パドル式造波板は図 3.3 に示すような金属製の板である。この板を動かすことによ り、造波を行う。造波板のストロークの最大は、中立位置より前後
500mmである。
造波板を動かす距離を長くするあるいは動かす所要時間を短くすることで、波高の大
きい波を造ることができる。極端に距離が長く、時間が短い場合は、うまく造波でき
ないので注意が必要である。
12
図 3.7 造波装置制御盤
② 津波(孤立波)制御ソフトウェア「Tsunami7」
PC
より造波板を制御するには、専用のソフトウェアが必要である。本研究では、孤
立波を取り扱うため、津波(孤立波)制御ソフトウェア「Tsunami7」を使用した。本
ソフトウェアでは、 「長周期波」 「孤立波」 「任意波形」の
3つの出力方法がある。 「孤
立波」を使用しても、任意の
1つの孤立波は造波することができるが、複数の孤立波
を造波することはできない。本研究では、2 つの孤立波を扱うため、 「任意波形」で出
力した。
13
3.2.2 造波板変位データの作成
造波ファイルの形式は、テキスト形式(.txt)とした。以下に造波板の変位データを算 出した式を示す。
①
1波の場合
d(t) = { 𝐶 [𝐴1
2 tanh {2𝜋 (𝑡 𝑡1
−1 2)} +𝐴1
2 tanh 𝜋] 0 ≤ 𝑡 < 𝑡1 𝐶[𝐴1tanh 𝜋] 𝑡1≤ 𝑡
②
2波の場合
d(t) =
{ 𝐶 [𝐴1
2 tanh {2𝜋 (𝑡 𝑡1−1
2)} +𝐴1
2 tanh 𝜋] 0 ≤ 𝑡 < 𝑡1
𝐶[𝐴1tanh 𝜋] 𝑡1≤ 𝑡 < 𝑡1+ 𝑡𝑖
𝐶 [𝐴2
2 tanh {2𝜋 (𝑡 𝑡2
−1 2)} +𝐴2
2 tanh 𝜋 + 𝐴1tanh 𝜋] 𝑡1+ 𝑡𝑖 ≤ 𝑡 < 𝑡1+ 𝑡𝑖+ 𝑡2 𝐶[𝐴1tanh 𝜋 + 𝐴2tanh 𝜋] 𝑡1+ 𝑡𝑖+ 𝑡2≤ 𝑡
ここで、𝐶 は
mmを
Voltに変換するための係数[V/mm]、
𝐴1
・𝐴
2は
1波目・2 波目の造波板の変位幅[mm]、𝑡
1・𝑡
2は変位に要する時間[s]、
𝑡𝑖
は
1波目と
2波目の時間間隔[s]である。
図 3.8 は、2 波を造波する際の造波板の動きをグラフ化したものである。縦軸は造波 板の変位、横軸は時間を示している。
①
𝑡1の時間で、1 波目の孤立波を造波している。
②
𝑡𝑖の時間では、造波板は動かずに静止している。この時間が長いと造波板から遠い位 置で追越することになり、短いと近い位置で追越することとなる。この時間を適切に 調節することにより、計測地点で追い越すようにした。
③
𝑡2の時間で、2 波目の孤立波を造波している。
14
図 3.8 造波板変位信号グラフ
図 3.9 は、造波板変位データファイルの一部である。
1行目は、造波板変位の信号の数 で表す。この値が正確でない場合、Tsunami7 で読み込みが行えず、造波板を動かすこと ができないため、正確に記す必要がある。
2行目は、
0.1秒間に読み取る信号の数を表す。
この値が大きいほど、造波板の動きをより細かく設定できる。本実験では、 「10」で固定 した。3 行目から下の行が、造波板変位の信号を表す。単位は、Volt である
①
\\\
\\
② ③
15
図 3.9 造波板変位信号ファイル
16
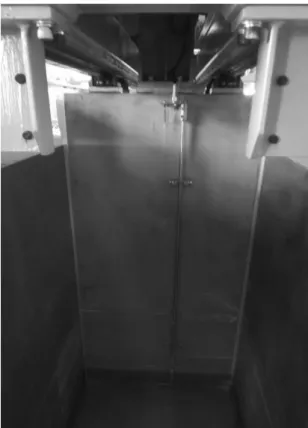
3.3 防波堤(直立壁)
本研究では、アクリル樹脂を用いて、防波堤(直立壁)を作成した。 (図 3.10)反射実
験用に
22cm、越波実験用に10,12,14cmの
4種類を作成した。
直立堤は
1枚のアクリル樹脂(高さ
10cm)は水槽にシリコン接着剤とアルミ棒(図3.11)を用いて固定した。もう1
枚のアクリル樹脂(高さ
10,12,14,22cm)を固定したアクリル樹脂とアルミ棒の間に挟み込む形にした。 (図 3.12、図 3.13、図 3.14)このよう な構造にすることにより、一定の強度保ちつつ、防波堤の高さを変更しやすくした。
図 3.10 アクリル樹脂
図 3.11 アルミ棒
17
図 3.12 直立堤設置部の概要図(横から見た図)
図 3.13 直立堤設置部の概要図(上から見た図)
図 3.14 直立堤の様子
波の進行方向
波の進行方向
18
3.4 計測方法
本研究では、可視化画像計測、水面計計測、流速計測を行った。計測位置は、表 3.1 に 示す位置で行った。可視化画像計測では、造波板から
16.0mの位置を中心に幅約
0.8m(80cm)の範囲を撮影した。水面形計測・流速計測では、計測機器(容量式波高計、電 磁流速計)を設置し、通過する波の水面形・水粒子速度の時間変化を計測した。
表 3.1 計測位置(造波板からの距離)
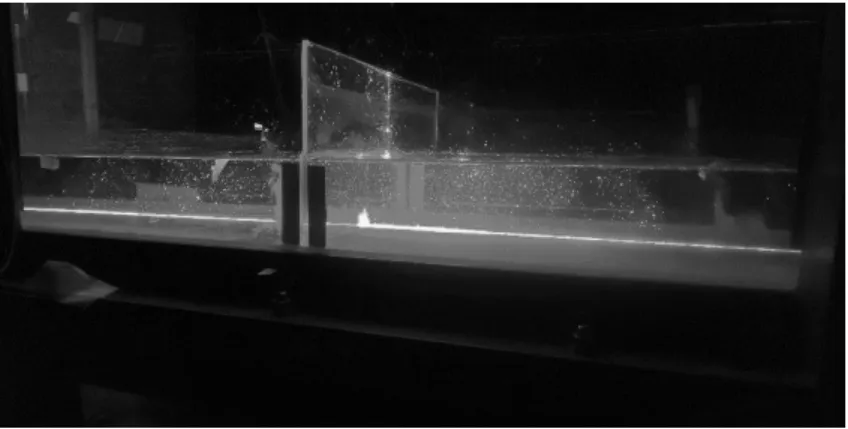
3.4.1 可視化画像計測
可視化画像計測とは、水中内に水粒子と同程度の密度の粒子を、上方からのレーザー シートにより可視化し、高速度カメラを用いて、連続撮影を行う計測法である。通常、
水は無色透明の液体であるため、水粒子の挙動を視覚的に計測することはできない。ま た、後述の流速計測(3.4.3)でも流体内の計測は可能であるが、計測機器を水中内にい れるため、流体の運動に影響を与えてしまう。そこで、本研究では、水に直接影響を与 えることなく、運動を計測するため、可視化画像計測を行った。
以下、可視化画像計測に用いた機器などを示す。
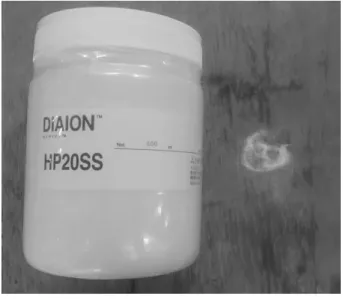
①トレーサー粒子(図 3.15)
本研究では、粒形
37~150μmの高分子(DIAION)を使用した。
②高出力レーザー(図 3.16)
本研究では、カノマックス製の
FKLA-8000eを用いた。最大出力は
8.0Wである。レー ザー端部には、調節ダイヤルが
2つ装備されている。実験前にこの
2つのダイヤルを調 節し、レーザーの光軸を中心部で最も強度が高くなるようにする。 (光軸がずれていると、
出力を上げても、光が弱くなってしまう。
1度合わせても、長時間するとずれてしまうこ ともあるため、定期的に確認する必要がある。)
③LVS プローブ(図 3.17)
この機器は高出力レーザーから出力されたレーザーをシート状に拡散照射するために 用いる。プローブには
2つのツマミが装着されている。この
2つのツマミを調節するこ とで、レーザーシートの幅と長さを調節する。
④パワーサプライ(図 3.18)
この機器は高出力レーザーの出力を調節するために用いる。本実験では、基本的に出 力は最大とした。 (トレーサー粒子を入れすぎた場合は、出力を弱くし、水全体が光るこ
可視化画像計測 水面形計測 流速計測 壁なし実験 15.6~16.4m 16.0m、17.5m(2点) 16.0m(1点)
反射・越波実験 15.6~16.4m 17.5m(1点)
19
との内容にした。 )
⑤高速度カメラ(図 3.19)
解像度は、最大で
1024×1024ピクセルである。その場合、フレームレートは最大で
3600fps
である。また、解像度を
128×128ピクセルまで落とせば、フレームレートは最
大
125000fpsとすることができる。本研究では、解像度は
1024×1024ピクセル、フレー
ムレートは
250fpsとした。今回は暗室内での撮影となるため、フレームレートを大きく すると、シャッター速度は小さくなり、画像全体が暗くなってしまうためである。レン ズには
20mmの単焦点レンズを使用した。
撮影ソフトウェアは、Photron Fastcam Viewer(PFV) (図 3.21)を使用した。このソフ トでは、撮影条件の設定、撮影画像の編集、保存を行うことができる。
以下、可視化画像計測の手順を示す。
①トレーサー粒子を水中内に入れる。
・事前に密閉容器などを用いて、水とトレーサー粒子をしっかり混ぜ合わせてから投入 する。直接、水槽内に投入すると、ダマになってしまい、粒形が大きくなり、計測がう まくいかない場合があるためである。
・投入時は、撮影領域に均等に入れる。投入量が多すぎると、レーサーの反射が強すぎ、
水全体が光ってしまうため、調節しながら少しずつ投入する。繰り返し実験を行う場合 は、
1撮影ごとに、金属棒などを用いて、水槽内の粒子が均一になるようかき混ぜる。ま た、孤立波は微小振幅波と違い、水粒子がその場で円運動を描くのではなく、波の進行 方向に流れていくので、撮影中、粒子が少ない場合は、途中で追加投入することも必要 である。
②上方からレーザーシートを照射する。
・レーザーは直接見ると、失明の危険性があるため、気を付ける。
③高速度カメラを用いて、連続撮影を行う。
④PC に画像を保存する。 (.bpm 形式)
20
図 3.15 トレーサー粒子
図 3.16 高出力レーザー
図 3.17
LVSプローブ
21
図 3.18 パワーサプライ
図 3.19 高速度カメラ
図 3.20 可視化画像計測の様子
22
図 3.21
Photron Fastcam Viewer(PFV)23
3.4.2 水面形計測
水面形計測は、容量式波高計(図 3.22)を用いた。計測目的は、孤立波の波形の確認 と波速の算出である。データ収集時間間隔は
10ms(0.01s)、データ数は
1500(計測時間は
15s)として、CSVファイルで保存した。
波高計本体(図 3.23)は、波高計で測定したデータを数値化し、データレコーダー(図
3.24)に送る装置である。また、波高計の0
(ゼロ)設定もこの装置で行う。今回使用し
た波高計本体は、4 つの波高計を同時に一ヶ所にまとめて取り扱うことができる。
図 3.25 は、水面形計測時の様子である。
図 3.22 容量式波高計 検出部
図 3.23 容量式波高計 本体部
図 3.24 データレコーダー
24
図 3.25 水面形計測時の様子
25
3.4.3 流速計測
流速計測は、電磁流速計(図 3.26)を用いた。電磁流速計は、水平と鉛直の
2方向の 流速を計測することができる。計測は、水底より水面に向かって
1.0cm~9.0cmの範囲を
1.0cm
ごとに計
9点計測した。計測目的は、孤立波の流速の確認の確認である。データ収
集時間間隔は
10ms(0.01s)、データ数は1500(計測時間は15s)として、保存ファイル形式は
CSV形式とした。計測時の注意点としては、電源を入れている間、測定部(図
3.26の右上の黒い部分)は、熱を持つため、常に水中に入れておく必要がある点である。
そのため、初期水面より上の部分の流速を測定することはできない。
流速計本体(図 3.27)は、流速計で測定したデータを数値化し、データレコーダー
(水面形計測と同様)に送る装置である。また、流速計の
0(ゼロ)設定や計測範囲の設定もこの装置で行う。図 3.28 は、流速計測時の様子である。
図 3.26 電磁流速計 検出部
図 3.27 電磁流速計 本体部
図 3.28 流速計測時の様子
26
3.4.4 越波量計測
越波量計測では、市販のビニール袋(45 リットル)を用いて行った。
図 3.29 のようにビニール袋の口を水槽壁面と防波堤に固定し、越波した水を回収し た。回収した水は体重計を用いて計測を行った。
図 3.29 越波量計測の様子(ビニール袋設置時)
図 3.30 越波量計測の様子(計測時)
27
3.5 解析手法
3.5.1 水面形抽出法
波の空間波形を計測方法の
1つに画像処理を用いた水面形の抽出法である。本研究で は、輝度値の最大値が水面であるという考えに基づいた方法を使用した。以下、手順を 簡単に示す。
①1 枚目の画像の
1番左の列の初期水面のピクセルから、右側に向かって、
n行目の水面 ピクセルの上下
3ピクセルの範囲を
n+1行目のピクセルの輝度値が最大となる点を探し、
そこを
n+1行目の水面ピクセルとする。これを
1番右の列まで行う。
②2 枚目の画像では、
1枚目の
1番右の列の水面ピクセルを基準に、左側に向かって、水 面ピクセルを算出していく。
③3 枚目の画像では、
2枚目の
1番左の列の水面ピクセルを基準に、右側に向かって、水 面ピクセルを算出していく。
④以下、偶数枚目の画像では②、奇数枚目では③の方法を用いて、順次水面形を求めて いく。
図 3.31 元の画像
図 3.32 水面形
28
3.5.2 オプティカルフロー
可視化画像計測の結果から、流体内の速度ベクトルを算出する方法はいくつか存在す る。
本研究では、複数の方法を用いて、比較検証を行い、使用する方法を決めた。
比較した方法は以下の
3通りである。カッコ内は使用したオープンソースである。
①相互相関
PIV(OpenPIV)②オプティカルフロー
Lucas-Kanade法(OpenCV) (以下 オプティカルフローLK)
③オプティカルフロー
Gunnar Farneback法(OpenCV) (以下 オプティカルフローGF)
比較検証に使用した画像の概要は以下の表の通りである。
表 3.2 検証画像概要
まず、それぞれの手法について、簡単に説明する。
①相互相関
PIV連続する
2画像間にある領域を設けて、その領域内の輝度値パターンの類似性を評価 することにより移動量を算出する方法である。ただし、領域内の流速はすべて等しいと いう仮定の元に計算を行う。まず
1枚目において、任意の位置
Aを中心として検査領域 を設定する。2 枚目の画像において、先ほどの同じ位置を中心として検査領域より大き い探査領域を設ける。そして、検査領域内から探査領域と最も類似度が大きい場所の中 心位置
Bを求め、
AB間の距離を移動量とする。この移動量を
2枚の画像間時間間隔
tで 除したものが流速ベクトルとなる。
②オプティカルフロー
LK連続した
2画像間の物体の移動は微小であるという仮定の下に勾配法を用いて速度ベ クトルを算出する方法である。時刻
tにおける座標(x,y)の画素値
I(x,y,t)と、時刻t+Δtに おける座標(x+Δx,y+Δy)に移動した画素値
I(x+Δx,y+Δy, t+Δt)が等しいとすると、I(x, y, t) = I(x + ∆x, y + ∆y, t + ∆t) (3.1)
となる。
撮影者 石川成美 撮影日
2016年
1月
8日
サイズ
1024 x 824(
pixel)
フレームレート
250fps枚数
313枚
29
右辺をテイラー展開し、2 次以上の項を無視して、近似すると、以下のようになる。
I(x, y, t) ≈ I(x, y, t) + I(x, y, t)Ix(x, y)∆x + I(x, y, t)Iy(x, y)∆y + I(x, y, t)It(x, y)∆t (3.2)
これを整理すると、
Ix(x, y)∆x
∆t + I𝑦(x, y)∆y
∆t+ It(x, y) = 0 (3.3)
となる。式
(3.3)をオプティカルフローの拘束条件式という。時刻
tの座標
(x,y)におけるオプティカルフローを
u =∆x∆t, v =∆y
∆t
とすると、
Ix(x, y)u + Iy(x, y)v + It(x, y) = 0
Ix(x, y)u + Iy(x, y)v = −It(x, y) (3.4)
となる。
しかし、この式だけでは、未知数
u,vを持つオプティカルフローを求めることはでき ない。
Lucas-Kanade
法では、ある画素の近傍画素も同じオプティカルフローであるという仮
定の元、方程式を増やすことで、流速ベクトルを算出する方法である。
③オプティカルフロー
GFGunnar Farneback
法は、基本原理は
Lucas-Kanade法と同じである。違いは、連続する
2
画像間の近傍画素を
2次の多項式で近似し、 環境光の変動を受けにくくした点である。
今回は、それぞれの方法において、グリッドのサイズを
8,16にし、比較検証を行った。
比較項目と理由は、以下の
3つである。
①計算時間・・・同じ精度なら計算時間が早いほうがより多くの解析ができるため。
②最大水平流速・・・理論や電磁流速計との結果と比較し、精度を確かめるため。
③最大水平流速の分散・・・精度が同じ場合、画像ごとに処理にばらつきが少ないほう
がいいため。 (単独波では、理論上最大水平流速は時間の経過により変化しない)
30
①計算時間
計算時間は、以下の表 3.3 の結果となった。
表 3.3 手法、グリッドごとの計算時間
グリッドサイズが大きくなれば、解像度が荒くなり、その分計算時間が短くなる。オ プティカルフローは相互相関
PIVの
8ピクセルの場合で約
70倍、16 ピクセルの場合で
約
20~30倍速くなることが明らかとなった。また、オプティカルフローでは、グリッド
サイズを大きさによる計算時間に違いはほとんどなかったが、相互相関
PIVでは、グリ ッドサイズを
1/2にしたことにより、計算時間が
4倍長くなった。
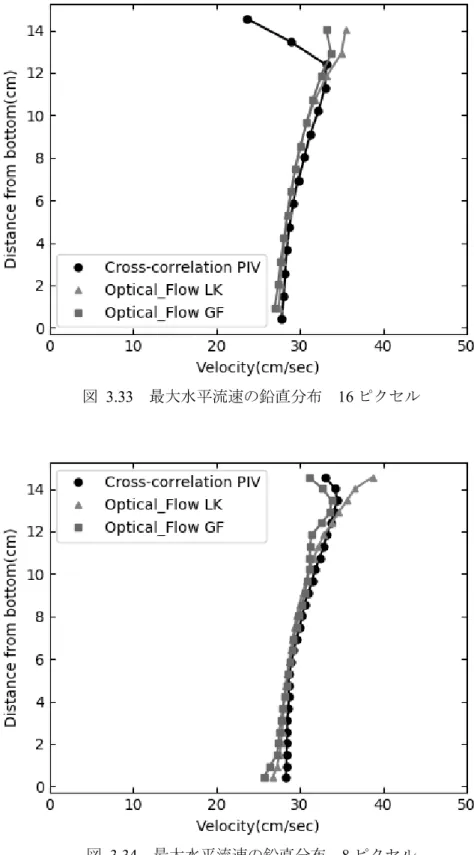
②最大水平流速
最大水平流速の鉛直分布は、図
3.31、3.32のようになった。8 ピクセル、16 ピクセル どちらも手法による違いはほとんどなかった。よってどの手法を使用しても、問題なく 解析できると考えられる。
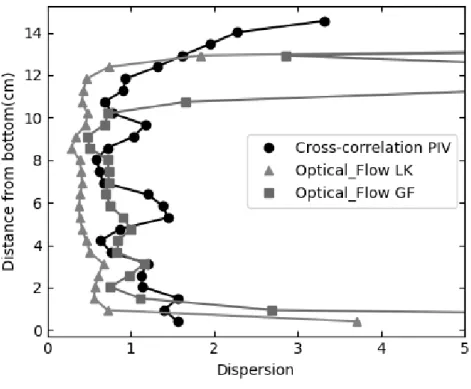
③最大水平流速の分散
最大水平流速の鉛直分布は、図
3.33、3.34のようになった。水面付近と水底付近は、
レーザーが強く反射してしまい、粒子をとらえることが難しいため、ずれが大きくなり、
分散が大きくなったと考えられる。それ以外の部分を見ると、相互相関
PIVよりオプテ ィカルフローの方が分散は小さいことが分かる。オプティカルフローの中でも全体的に みると、Lucas-Kanade 法の方が小さい。よって、オプティカルフローLucas-Kanade 法が 最も安定して処理できていることが分かる。
①②③の結果より、計算時間が早く、精度もよい、 「オプティカルフロー
Lucas-Kanade法」の
8ピクセルを本研究では、用いることとした。
16 43
分
40秒
1分
30秒
2分
10秒
8 2
時間
54分
45秒
2分
30秒
2分
40秒
グリッド
(
pixel) 相互相関
PIV Optical FlowLucas-Kanade
法
Optical Flow
Gunnar Farneback
法
31
図 3.33 最大水平流速の鉛直分布
16ピクセル
図 3.34 最大水平流速の鉛直分布
8ピクセル
32
図 3.35 最大水平流速の分散の鉛直分布
16ピクセル
図 3.36 最大水平流速の分散の鉛直分布
8ピクセル
33
3.6 実験条件
2
波の追越衝突現象に関する実験では、表 3.4 に示す条件で実験を行った。
表 3.4 実験条件(2 孤立波の干渉実験)
ケース
1~3は単独の孤立波、ケース
4,5は追越の孤立波である。ケース
2の波高
2.8cmは、ケース
4の追越時の最小波高であり、追越時と同波高単独波を比較し、特性の違い について議論するために行った。
反射・越波実験では、表 3.5 に示す条件で実験を行った。
表 3.5 実験条件(反射・越波実験)
越波実験では、防波堤の高さによる影響を考えるため、10,12,14cm の
3通りの実験を 行った。追越のケースでは、造波間隔時間を変え、計測位置(造波板より
16.0m)で最小となる時間を基準に(0.0sec)、干渉前後
0.1,0.2secも実験をし、衝突の進行度合による違い を確かめた。
第1波 第2波
1 1.0
2 2.8
3 4.0
4 1.0 4.0
5 1.3 4.0
水深
[cm]10
単独波
追越
波高[cm]
第1波 第2波
1 1.0
2 2.8
3 4.0
4 -0.2
5 -0.1
6 (最小波高時) 0.0
7 +0.1
8 +0.2
追越
1.0 4.0水深
[cm]
波高[cm] 造波間隔時間
[sec]壁高[cm]
(直立壁)
単独波
10
22
(反射実験)
10,12,14
(越波実験)
34
また、実験に用いた造波板の変位信号を表 3.6 に示す。
表 3.6 造波板変位信号
造波板の変位幅[mm] 変位に要する時間[s]
1.0 100 2.5
1.3 100 2.2
2.8 140 1.1
4.0 180 1.05
波高 信号
[cm]35
第4章 2 孤立波の干渉(追越衝突現象)
4.1 水面形の時間変化、空間波形
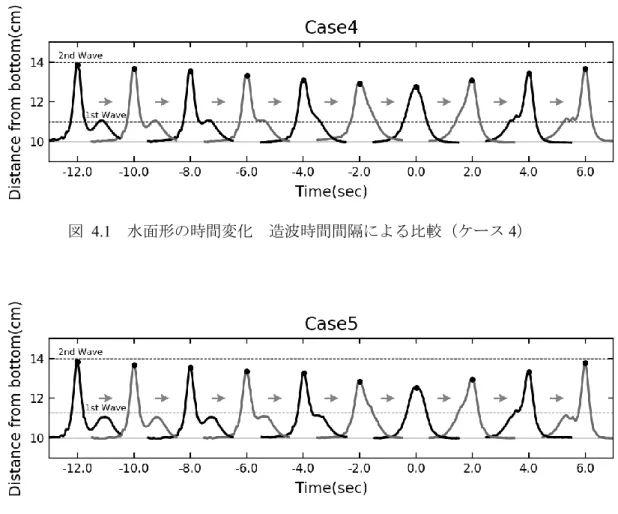
図 4.1 および図 4.2 は、追越時の水面形の時間変化を示す。黒点は、それぞれの水面 形の最大波高点を示す。図より、徐々に第
2波の波高が下がり、最小になったのち、再 び上昇していることが分かる。
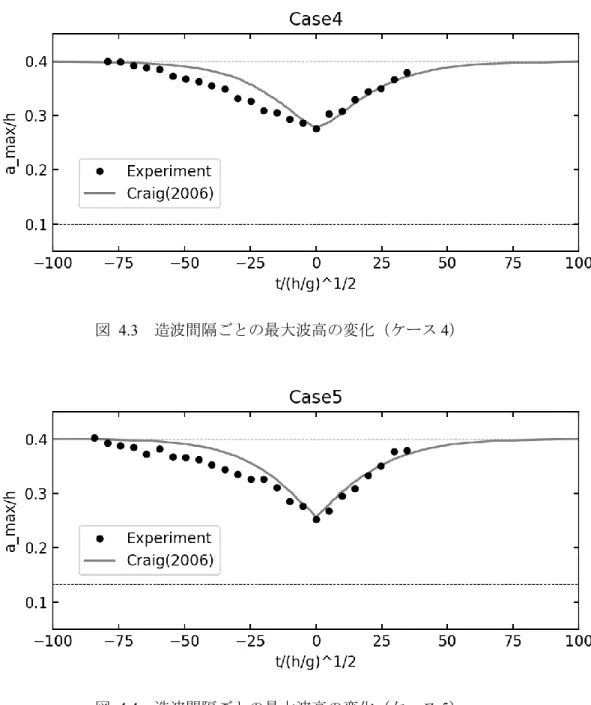
図 4.3 および図 4.4 は、干渉時の最大波高変化の実験結果と既往研究を比較した図で ある。実線は
Craigら(2006)は、擬似スペクトル法を用いた数値計算の結果である。干渉 時には、最大波高が徐々に減少に追越の瞬間に最小となり、その後再び増大しているこ とが分かる。本実験の結果、
2波の波高比(a1/a2)によらず全てのケースにおいて、干渉前 の波高減少速度と干渉後の波高増大速度が異なった。しかし、この傾向は減少速度と増 大速度が一致した
Craigら(2006)の計算結果とは異なるものだった。これらのことより、
干渉前後で干渉の特性が異なっている可能性が考えらえる。
図 4.6 および図 4.7 は、干渉時の造波間隔ごとの高水位継続時間の変化を示した図で ある。高水位継続時間とは、それぞれの水面形ごとに、最大波高の
1/2以上が継続する 時間である。 (図 4.5 の高水位領域の時間)干渉時の最大波高変化とは対照的に、計測 時間が徐々に長くなり、追越の瞬間に最大となり、その後短くなっていることが分か る。波高が下がると同時に、波形は時間的に長くなることが分かった。ケースによる違 いは見られなかった。
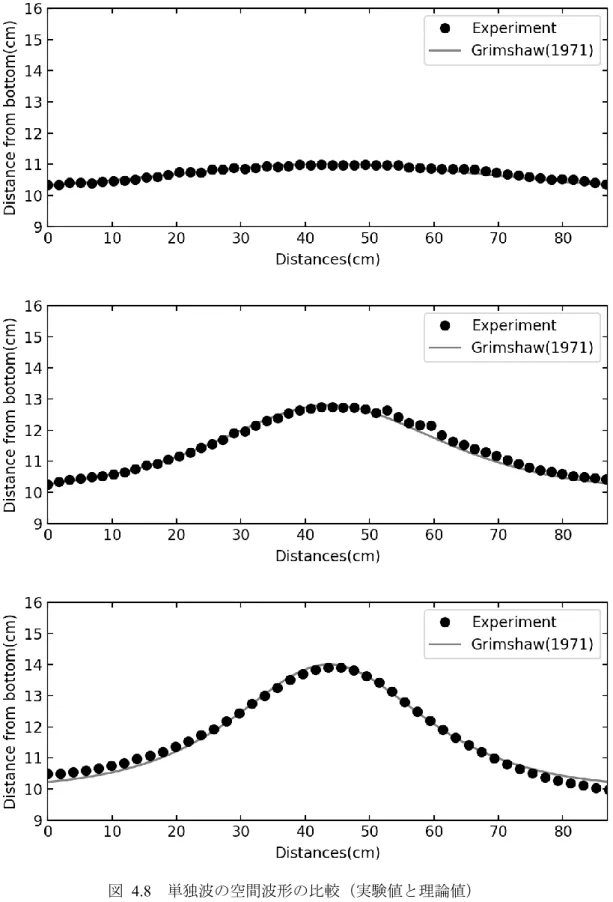
図 4.8 は、単独波の空間波形を理論値と比較した図である。理論値は、
Grimshaw(1971)の
3次オーター式(式 2.9)である。すべてのケースにおいて、実験値と理論値は一致して おり、実験、解析の正確性と確かめることができた。
図 4.9 は追越時の空間波形の変化を示す。追越時には、徐々に空間波形を変化させな がら伝播する。しかし、本実験の撮影範囲では、追越時の空間波形の全体を撮影するこ とはできなかった。今後は撮影範囲を広くするなどの工夫が必要である。また、追越時 の空間波形が単独波の空間波形と違いを明らかにするため、空間波形の比較を行うこと とした。
図 4.10 および図 4.11 は、干渉時の空間波形と単独波の空間波形を比較した図である。
追越時の波形は、図 4.9 の(5)0.8sec である。干渉時の空間波形と単独の第
1,2波の空間
波形を比較すると(図 4.10) 、干渉時は、波高が
2波の間の値となり、空間波形は横に広
がった形となっていることが分かる。また、干渉時と同波高の単独波の空間波形を比較
しても(図 4.11) 、空間波形の違いは明らかである。
36
図 4.1 水面形の時間変化 造波時間間隔による比較(ケース
4)図 4.2 水面形の時間変化 造波時間間隔による比較(ケース
5)37
図 4.3 造波間隔ごとの最大波高の変化(ケース
4)図 4.4 造波間隔ごとの最大波高の変化(ケース
5)38
図 4.5 高水位領域
図 4.6 造波間隔ごとの高水位継続時間の変化(ケース
4)図 4.7 造波間隔ごとの高水位継続時間の変化(ケース
5)最大波高 1/2最大波高 高水位領域
39
図 4.8 単独波の空間波形の比較(実験値と理論値)
(上:ケース
1、中:ケース2、下:ケース3)40
図 4.9 追越時の空間波形の時間変化(ケース
4)41
図 4.10 追越時の空間波形の比較(追越時:ケース
4と単独波:ケース
1、3)図 4.11 追越時の空間波形の比較(追越時:ケース
4と単独波:ケース
2)42
4.2 水粒子速度の時間変化
図 4.12 は単独波の空間流速分布を示す。波高が上がるにつれ、流速が大きくなってい ることが分かる。
図 4.13 は追越時の空間流速分布の時間変化を示す。追越時の空間流速分布は、波形が 横に広がり
1つのグラフでは全体をとらえることができない。また、水平成分と鉛直税 分を分けて考察するためにも、ある
1断面での流速分布の時間変化をコンター図にして、
そのグラフをもとに考察を行うこととした。
図 4.14、図 4.15、図 4.16、図 4.17 はそれぞれケース
1~4の流速分布をコンター図に 示したものである。水平流速は、波の峰付近で大きくなる。一方で、鉛直流速は波の峰 より前方で大きくなり、後方で小さくなる。
図 4.18 は高流速領域の比較を行った図である。高流速領域とは、最大流速の
1/2以上 となる範囲である。単独波では波高が高くなるにつれて、空間波形は横に狭くなった形 となるため、高流速領域も短くなる。実験の結果からもそのことは明らかである。一方 で、干渉時の波高は第
1波より大きいが、高流速領域は第
1波よりも増大する結果とな った。干渉時の同波高波と比較すると約
1.7倍、第
2波とでは約
2.0倍に拡大した。この 高流速領域の増大する結果は、底面剪断力が変化にも影響を及ぼすこと示唆される。
図 4.19 は単独波の最大水平流速を理論値との比較を示した図である。理論値は、
Grimshaw(1971)の 3
次オーター式(式 2.10,式 2.11)である。波高水深比が小さい場合(a/h
=0.1)は、理論値と一致しているが、波高水深比が大きくなるにつれて、ずれが大きくな ることが分かる。これは、Grimshaw(1971)の理論式が
3次オーターのため、波高水深比 が大きくなると、式では無視していた
4次以降の影響も無視できなくなり、このような ずれが発生したと考えられる。
図 4.20 は単独波と干渉時の最大水平流速の比較を示した図である。単独波では、波高 水深比が小さい場合(a/h=0.1)は鉛直方向にほぼ一様の分布となる。一方、第
2波のよう に波高水深比が高くなると、水底から水面に向かって流速が増大する非一様分布となる。
これに対して、干渉時の水平流速は、最大値は単独の第
1波と第
2波との中間的な値を 示し、鉛直方向にほぼ一様な分布となった。干渉時の最大波高と同波高(a/h=0.28)の単独 波と比較しても、その特徴が分かる。
図 4.21 は手法の違いによる違いを示した図である。オプティカルフローを用いて算出
した結果も電磁流速計で計測した計測もおおむね一致していることが分かる。
43
図 4.12 単独波の空間流速分布
(上:ケース
1、中:ケース2、下:ケース3)44
図 4.13 追越時の空間流速分布の時間変化(ケース
4)45
図 4.14 流速コンター図(ケース
1)46
図 4.15 流速コンター図(ケース
2)47
図 4.16 流速コンター図(ケース
3)48
図 4.17 流速コンター図(ケース
4)49
図 4.18 高流速領域の比較
(上:ケース
1、中上:ケース2、中下:ケース3、下:ケース4)50
図 4.19 最大水平流速の鉛直分布の比較(実験値と理論値)
図 4.20 最大水平流速の鉛直分布の比較(単独波と追越)
51
図 4.21 最大水平流速の鉛直分布の比較(オプティカルフローと電磁流速計)
52
第5章 干渉する 2 波の越波・反射特性 5.1 反射実験
図 5.1 は反射時の壁面での最大波高の実験結果を示した図である。単独波の場合は、
波高が増大するほど、最大波高も大きくなっていることが分かる。干渉時の
0.0sと干渉 時と同波高の単独波(2.8cm)と比較すると、同じであることが分かる。また、造波時間間 隔の絶対値が増大するにつれて、最大波高も増大することが分かる。これらの結果か ら、単独波の場合も干渉波の場合も入射波高が重要なパラメーターとなっていると考え られる。
図 5.2 は入射波高と反射時最大波高の比較を示した図である。単独波の場合は、
Su&Mirie(1980)による理論により、入射波高から反射時最大波高を求めることできる、実
験の結果と比較した結果、ほとんど一致することが分かった。この結果から、干渉時も
入射時の波高から反射時最大波高を求めることができることが明らかとなった。
53
図 5.1 反射時最大波高の計測結果
図 5.2 反射時最大波高と入射波高の比較
図
5.2の
Su&Mirie(1980)による反射時最大波高の式は以下のとおりである。amax
h = 2 (a
h) +1
2(a
h)2+3
4(a
h)3 (5.1)
54
5.2 越波実験
5.2.1 伝達波
図 5.3、図 5.4、図 5.5 は伝達波の水面形の時間変化を示したグラフである。
壁高
10cmのケースでは、単独波も干渉波も波高は下がっているものの孤立波の波形 は維持していることが分かる。壁高
10cmは、水深と同じであり、孤立波の峰の部分は直 立堤の影響は直接受けず伝播したため、このような結果になったと考えられる。また、
興味深いとこに、干渉波では、越波後も干渉が続いていると考えられる。壁の位置で追 越の瞬間であった
0.0sのケースの波形を見ると、大きい山が前方寄りになった追越衝突 後のような波形であることが分かる。また、壁の位置では、追越前であった-0.1s のケー スでは、波形はほぼ左右対称となり、追越の瞬間のような波形になった。それ以外のケ ースも同様に越波後も干渉が続いていることが分かる。
壁高
12cmのケースでは、単独波も干渉波の孤立波のような波形ではなく、振動して いることが分かる。壁高
10cmのケースとは違い、水面と壁の間に距離があったため、越 波した水が塊となって、水面に落下し、その衝撃で波が発生したと考えられる。そのた め、元の孤立波の波形形状が残らなかったと考えられる。
壁高
14cmのケースでも壁高
12cmのケースと同様に、単独波も干渉波の孤立波のよう な波形ではなく、振動していることが分かる。
図 5.6 は伝達波の最大波高を示した図である。単独波では、波高が高いほど、伝達波 高も高くなっている。壁高
10cmのケースでは、水面形の時間変化でも述べた通り、干渉 が続いていることが分かる。 伝達波高は、 壁の位置で最小だった
0.0sのケースではなく、
-0.1s
のケースが最小となった。また、すべての高さにおいて、干渉時の伝達波高は、第
2
波(4.0cm)と干渉時の同波高単独波(2.8cm)の間の値となった。これは、干渉時の高水位 領域が拡大し他ためであると考えられる。
図 5.7 は波高伝達率を示した図である。近藤ら(1964)による実験値および実験近似式
と同時にプロットした。単独波では、実験値および実験近似式とおおむね一致する結果
が得られた。干渉時は、壁の高さが水深と異なる、hc≠0.0 の場合は、実験値および実験
近似式とおおむね一致した。一方で、hc≠0.0 の場合は、大きく異なった。これは、前述
のとおり、壁衝突後も干渉が続き、元の波高に戻ろうと波高が上昇したため、波高減衰
率が大きくなったと考えらえる。
55
図 5.3 伝達波(壁高:10cm) 水面形の時間変化
56
図 5.4 伝達波(壁高:12cm) 水面形の時間変化
57
図 5.5 伝達波(壁高:14cm) 水面形の時間変化
58
図 5.6 伝達波 最大波高(上:壁高
10cm、中:壁高12cm、下:壁高14cm、)
59
図 5.7 波高伝達率の比較
Hi・・・入射波高、Ht・・・伝達波高、hc・・・
初期水面からの壁高
hc/Ht・・・相対天端高、Hi/Ht・・・波高伝達率
図
5.7の近藤ら(1964)による波高伝達率の近似式は以下のとおりである。
Ht
Hi = 0.3 (1.5 −hc
Hi)
(hc/H
i≦1.25)
(5.2)60
5.2.2 越波量
図 5.8 は越波量の計測結果を示した図である。
壁高
10cmのケースでは、単独波の場合、波高が高い波ほど越波量が増大する結果と なった。干渉時の越波量は、単独の第
2波とほぼ同じ結果となった。波高は低くなった ものの壁より上の体積は干渉時の方が増大したため、このような結果になったと考えら れる。また、造波時間間隔による違いはほとんど見られなかった。
壁高
12、14cmのケースでも、単独波の場合は波高が高い波ほど越波量が増大する結
果となった。干渉時の越波量は、単独の第
2波より少なく、第
1波および干渉時の最大 波高と同波高の単独波よりも増大する結果となった。また、造波時間間隔による違いは、
0.0s
が最も少なく、造波時間間隔の絶対値が大きくなるほど、多くなった。これは、干 渉時も越波量に波高が影響しており、波高が高いほど越波量が多くなることを示してい る。
図 5.9 は越波水量比を示した図である。久保ら(1973)は実験の結果、越波水量比は、孤 立波理論から求めた式(2.14)と近藤ら(1964)の実験近似式(2.15)の間に入ることを示して いる。本実験の結果も
0<hc/Hi<1の範囲では、孤立波理論式と実験近似式の間に入った。
一方で、それ以外の範囲では、当てはまらなかった。hc/Hi=0 では、既存の結果より、
大きく下回る結果となった。流量が多すぎて、越波を収集する袋に入る際に抵抗が発生 してしまい、越波水量比が小さくなってしまった可能性が考えられる。hc/Hi≧1 では、
波高が壁の高さよりも小さいあるいは同じであるが、実験の結果、越波することが分か
った。反射時の波高が上昇するためであると考えらえる。
61
図 5.8 越波量の計測結果(上:壁高
10cm、中:壁高12cm、下:壁高14cm、)
62
図 5.9 越波水量比の比較
63
第6章 結論
本研究では、干渉する孤立波の理解を深めるとともに、その干渉が防波堤での反射越 波特性に与える影響を実験的に明らかにすることを目的として、実験を行った。以下に 本研究の結論を述べる。
① 水粒子速度の算出した可視化画像計測解析手法に関しては、オプティカルフローを 用いて、従来の相互相関
PIVに比べ、短時間かつ高精度で解析することができた。
② 干渉時の最大波高の時間変化に関しては、
2波の波高比(a1/a2)によらず全てのケース において、干渉前の波高減少速度と干渉後の波高増大速度が異なった。しかし、この 傾向は減少速度と増大速度が一致した
Craigら(2006)の擬似スペクトル法を用いた数 値計算の結果とは異なるものだった。これより、干渉前後で干渉の特性が異なってい る可能性が考えられる。
③ 水平流速に関しては、単独波では、波高水深比が小さい場合(a/h=0.1)は鉛直方向にほ ぼ一様の分布となる。一方、第
2波のように波高水深比が高くなると、水底から水面 に向かって流速が増大する非一様分布となる。これに対して、干渉時の水平流速は、
最大値は単独の第
1波と第
2波との中間的な値を示し、鉛直方向にほぼ一様な分布と なった。また、干渉時の高流速領域(最大流速の
1/2以上の範囲)は単独の第
2波よりも 約
2倍に拡大した(0.34sec→0.68sec)。これらの結果から、干渉時には水平流速の一様 化と高流速領域の増大が生じ、底面剪断力が変化すること示唆され、土砂移動にも影 響すると考えられる。
④ 反射時の壁面最大波高に関しては、単独孤立波では、
Su&Mirie(1980)による理論より、入射波高から反射時最大波高を求めることができる。実験結果と比較した結果、理論 と一致した。また、干渉時の結果と孤立波の理論を比較した結果、両者は一致し、干 渉時にも孤立波の理論を適用できることが明らかとなった。干渉時には高流速領域は 拡大したものの、壁での反射波と打ち消しあい、干渉の影響が表れることはなかった と考えられる。
⑤ 伝達波に関しては、単独波に関しては、既存の実験結果とおおむね一致した。干渉
時は、壁高
10cmでは、壁衝突後も干渉が進み、波形、最大伝達波高、波高伝達率に変
化がみられた。孤立波の峰の部分は直立堤の影響は直接受けず伝播したため、このよ
うな結果になったと考えられる。壁高
12,14cmでは、最大伝達波高は単独の第
2波よ
り小さく、第
1波および干渉時の最大波高と同波高の単独波よりも増大する結果とな
64