1
令和元年度 修士学位論文
加振レーダ法における鉄筋振動変位の
加振周波数依存性に関する研究
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
情報通信システム分野第一研究室
指導教員 三輪 空司 准教授
学籍番号
T181D066 松井 隼平
2
目次
第 1 章 序論 ... 4 1-1 研究背景 ... 4 1-2 研究目的 ... 4 第 2 章 原理 ... 6 2-1 加振レーダ法の原理 ... 6 2-2 マイグレーションの原理 ... 8 第 3 章 計測システム ... 11 3-1 計測システム概要 ... 11 3-2 ブロックダイアグラム ... 12 3-3 使用機器一覧 ... 13 3-4 多周波加振システム ... 16 第 4 章 供試体における鉄筋振動変位の加振周波数依存性 ... 20 4-1 実験概要 ... 20 4-2 かぶりの異なる供試体における振動変位加振周波数依存性 ... 21 第 5 章 実構造物における低周波及び高周波加振による実証実験... 28 5-1 実験概要 ... 28 5-2 実構造物における低周波および高周波加振による振動変位 ... 31 第 6 章 腐食時における振動変位の加振周波数依存性 ... 36 6-1 電食実験の原理 ... 36 6-1-1 鉄筋腐食の原理 ... 36 6-1-2 電食実験 ... 37 6-2 実験概要 ... 38 6-3 電食実験時における振動変位加振周波数依存性 ... 41 第 7 章 有限要素法による振動変位の加振周波数依存性要因推定... 52 7-1 概要 ... 52 7-2 連成解析 ... 54 7-3 有限要素法による加振周波数ごとの振動変位推定 ... 55 7-3-1 かぶりの異なる供試体でのシミュレーション概要 ... 55 7-3-2 かぶりの異なる供試体でのシミュレーション結果 ... 57 第 8 章 衝撃弾性波法による振動変位の加振周波数依存性要因推定 ... 65 8-1 衝撃弾性波法原理 ... 65 8-2 実験概要 ... 66 8-3 衝撃弾性波法による鉄筋コンクリートの固有振動数計測 ... 70 第 9 章 結論 ... 793 9-1 結論 ... 79 9-2 今後の課題 ... 80 参考文献 ... 81 謝辞 ... 81 研究業績 ... 82
4
第1章 序論
1-1 研究背景
近年、鉄筋コンクリート構造物の早期劣化が社会問題となっている。日本では1923 年の 関東大震災以後、防火や耐震などの有用性が認められ鉄筋コンクリート構造物が増加して いる。鉄筋コンクリートは、鉄筋がもつ破断しない粘り強さ(靭性)と引張強度、コンクリ ートがもつ高い圧縮強度を組み合わせたものである。しかし、大気中の二酸化炭素がコンク リート内部に侵入し炭酸化反応を起こすことによる中性化、塩化物イオンの影響で鋼材が 早期に腐食する塩害、コンクリート中の水分の凍結膨張が発生し長年にわたる凍結と融解 の繰り返しによってコンクリートが劣化する凍害、外力や施工ミスによって発生するひび 割れ等鉄筋コンクリート構造物の劣化要因は様々であり、それらによって連鎖的に劣化が 進行する。やがて鉄筋破断やコンクリートの崩落といった耐力低下、第三者被害の発生に結 び付く。また、現在、非破壊的な鉄筋コンクリート構造物の劣化評価法として衝撃弾性波法 や超音波法、電磁パルス法といった弾性波を用いた手法が知られており、その伝搬速度や振 動振幅の周波数スペクトル情報から、コンクリート強度や内部欠陥の評価に利用されてい る。しかし、これらの手法は弾性波を用いており鉄筋の劣化と伝搬路の劣化の両方の影響を 受けてしまう。 そこで、我々は伝搬路の劣化の影響を受けにくい電磁波に着目し、コンクリート表面から 励磁コイルで鉄筋を正弦振動させ、マイクロ波ドップラレーダの原理により、数m 程度の 鉄筋振動変位を非破壊的に計測する加振レーダ法を提案してきた。本手法はコンクリート の劣化により鉄筋の拘束力が低下することに注目し、鉄筋コンクリート構造物内の鉄筋の 振動変位を計測することで劣化診断を行うものである。また、従来のレーダ波形に加え、振 動物体にのみ感度を有する独立なレーダ波形も取得可能であり、鉄筋振動変位は両波形の 反射振幅比から得られるため、水分による媒質の減衰等の影響をキャンセルできる利点も 有する。 これまで、本手法において鉄筋の振動周波数を 100 Hz 程度の単一周波数に設定し、鉄筋腐 食などの劣化診断を行ってきた。しかし、構造物の劣化評価に実用的に議論されている劣化 による構造物の共振周波数の変化といった、広帯域な振動特性と劣化パラメータの情報を 利用できていなかった。また、この周波数で得られる振動が小さく、劣化による変動も少な いものであった。1-2 研究目的
そこで、本研究において加振周波数を変化させることにより、劣化による広帯域な振動特 性の取得及び鉄筋コンクリートの構造的な共振等を利用し、振動変位を増加させることを5
目的とする。このため、複数の加振周波数を用いて振動変位計測を行うことができる多周波 加振システムを作製し、供試体、実構造物および、電食実験時の振動変位加振周波数依存性 を測定し供試体ごとの加振周波数依存性の変化及び劣化の前後において最も変化の見られ る加振周波数の検討を行う。
6
第2章 原理
2-1 加振レーダ法の原理
本頁では、加振レーダ法の基本的な原理について述べる。 Fig. 2-1 に加振レーダ法におけるドップラ変位計測の概念図を示す。 簡単のため、単一周波数 𝑓 の電波のドップラ信号について考える。今、原点 にある送信 アンテナから、計測対象に向け電波を照射し、点(𝑥, 0) にある反射体から反射された反射波 を同一のアンテナで受信するものとする。同時に計測対象を単一周波数 𝑓𝑣 で振動させる。 ここで、振動周波数は電波の周波数に比べ十分低いため、対象は電波に対し一様に振動する ものとみなせる。このとき、反射体のパス方向変位 𝑢(𝑡) は一般に式(2-1-1)のように表され る。 𝑢(𝑡) = 𝛿 cos(2𝜋𝑓𝑣𝑡) (2-1-1) ここで、𝛿、𝑓𝑣 はそれぞれ振動振幅、振動周波数である。さらに、センサから反射点までの 距離 𝐿 は 𝑥/𝑧 ≪ 1とすると式(2-1-2)で近似できる。 𝐿(𝑡) ≅ 𝑧 +𝑥2 2𝑧 − 𝑢(𝑡) = 𝑙 − 𝑢(𝑡) (2-1-2) この反射体からの受信アンテナの位置における複素受信信号 𝑒̇(𝑓, 𝑡) は振動により反射波 の伝搬経路が時間的に微小変動するため、ドップラ効果により反射体の複素反射係数 𝑅 ̇ と 電波の波数を 𝑘 として式(2-1-3)のように表される。 Fig. 2-1 加振レーダ法の概念図Displacement:
EMwave
Vibration
Frequency:
Frequency:
Reflector
Wavenumber:
Velocity:
Antenna
Propagation
distance :
7 𝑒̇(𝑓, 𝑡) = 𝑅̇𝑒𝑗(2𝜋𝑓𝑡−𝑘2𝑙)𝑒𝑗2𝑘𝛿 cos(2𝜋𝑓𝑣𝑡) (2-1-3) ここで、アンテナ特性、球面拡散項は無視した。また、一般に 𝑟 ≪ 1とすると、以下の近似 が成立する。 𝑒𝑗2𝑟cos𝜃≅ 1 + 𝑗𝑟𝑒𝑗𝜃− 𝑗𝑟𝑒−𝑗𝜃 (2-1-4) 今、電波の波長(数cm)に対して、十分小さい振動変位(数m)を考えると、𝑘𝛿 ≪ 1から(3-4)式を用いて、受信信号𝑒̇(𝑓, 𝑡) は式(2-1-5) (2-1-6) (2-1-7)のように近似できる。 𝑒̇(𝑓, 𝑡) ≅ 𝑒̇0(𝑓, 𝑡) + 𝑒̇𝑑(𝑓 + 𝑓𝑣, 𝑡) + 𝑒̇𝑑(𝑓 − 𝑓𝑣, 𝑡) (2-1-5) 𝑒̇0(𝑓, 𝑡) = 𝑅̇𝑒−𝑗𝑘2𝑙 𝑒𝑗2π𝑓t (2-1-6) 𝑒̇𝑑(𝑓, 𝑡) = 𝑗𝑅̇𝑘𝛿𝑒−𝑗𝑘2𝑙𝑒𝑗2πf𝑡 = 𝑗𝑘𝛿𝑒̇0(𝑓, 𝑡) (2-1-7) ここで、𝑒̇0(𝑓, 𝑡) は加振を行わないときの受信信号と等価な信号であり、本論文では無変調 成分と呼ぶ.また、 𝑒̇𝑑(𝑓, 𝑡) は計測対象が単一周波数 𝑓𝑣 によって振動していれば発生する 信号であり、ドップラ成分と呼ぶ。無変調成分は反射体からの反射がレーダ波形として取得 されるが、ドップラ成分は振動物体のみからの反射波が取得される.この図を Fig. 2-2 に示 す。 このとき、受信信号から直交検波により周波数 𝑓 及び、𝑓 ± 𝑓𝑣の成分のみを取り出して 得られる無変調成分及びドップラ成分の伝達関数 𝐻̇0(𝑓) 、𝐻̇𝑑 (𝑓)はそれぞれ式(2-1-8)、(2-1-9)のように表される3)。 𝐻̇0(𝑓) = 𝑅̇𝑒−𝑗2π𝑓2𝑙/𝑣 (2-1-8) 𝐻̇𝑑(𝑓 ± 𝑓𝑣) = 𝑗𝑘𝛿𝐻̇0(𝑓 ± 𝑓𝑣) ≅ 𝑗2π𝑓𝐻̇0(𝑓) 𝛿/𝑣 (2-1-9) ここで、波数 𝑘 = 2π𝑓/𝑣を用い、振動周波数 𝑓𝑣 はレーダ波の周波数 𝑓 に比べ十分低いた め、𝑓 ± 𝑓𝑣 ≅ 𝑓とした。一般に、上式は空間分解能を有していないが、電磁波の周波数 𝑓 を 中心周波数 𝑓𝑐 、帯域幅 𝑓𝑤 で掃引しながら、それぞれの伝達関数 𝐻̇0(𝑓) 、 𝐻̇𝑑(𝑓) を計測 し、逆フーリエ変換すればアンテナ位置 (𝑥, 0) で得られた複素インパルス応答(レーダ波 形) 𝑔̇0(𝑥, 𝑡) 、𝑔̇𝑑(𝑥, 𝑡) がそれぞれ式(2-1-10)(2-1-11)で与えられる。 𝑔̇0(𝑥, 𝑡) = 1 𝑓𝑤 ∫ 𝐻̇0(𝑓)𝑒𝑗2π𝑓𝑡𝑑𝑓 𝑓𝑐+𝑓2𝑤 𝑓𝑐−𝑓𝑤 2 = 𝑅̇sinc {𝜋𝑓𝑤(𝑡 − 2𝑙 𝑣)} 𝑒 −𝑗2π𝑓𝑐(𝑡−2𝑙 𝑣) (2-1-10) 𝑔̇𝑑(𝑥, 𝑡) = 𝛿 𝑣 d d𝑡𝑔̇0(𝑥, 𝑡) (2-1-11) ここで、無変調成分 𝑔̇0(𝑥, 𝑡) の絶対値は反射体までの往復時間 𝑡 = 2𝑙/𝑣 においてピークを
8 有する波形であり、通常のレーダ反射応答と等価な時間波形である。一方、正のドップラ波 形𝑔̇𝑑(𝑥, 𝑡)は無変調成分の微分波形及び振動変位 𝛿 に比例している。したがって、アンテナ から距離 𝑙 にある反射体の伝搬パス方向の振動変位 𝛿(𝑙) は無変調成分の微分波形とドッ プラ成分波形における反射波到達時刻の振幅比として式(2-1-12)で与えられる3)。 𝛿(𝑥, 𝑙) = 𝑣 |𝑔̇𝑑(𝑥, 2𝑙/𝑣)/ d d𝑡𝑔̇0(𝑥, 2𝑙/𝑣)| (2-1-12) ここで、式(2-1-12)は波形ベースの推定により得られる振動変位であり、孤立した 1 個の反 射体について適用可能なことに注意が必要である。
2-2 イメージングの原理
通常RC レーダでは広範囲に電波を照射するため、反射波はアンテナ正面方向から到来す るとは限らない。一般に孤立した物体の直上を移動しながら取得した波形を取得位置順に 並べた場合、その反射波の到達時刻Fig. 2-2-1(a)のように放物線状のプロファイルを示し、 スキャン方向の空間分解能は低く、明瞭なイメージングをすることはできない。スキャン方 向の分解能を向上するためには合成開口処理が有効であり、本論文では劣化を起こしてい る供試体を対象としており、不要反射波の影響が多い第 5 章において合成開口処理のため キルヒホッフマイグレーション法を適用し、明瞭なイメージングを行う。キルヒホッフマイ グレーション法とは時間シフトしたレーダ波形を重ね合わせる合成開口処理であり、比較 的アルゴリズムが単純で、簡単な計算にて求めることができる。ただし、本処理では媒質中 Fig. 2-2 レーダ波形概念図𝑔
0 反射体1の反射波 反射体2(振動物体) 反射体1 反射体2の反射波 時間無変調成分のレーダ波形
反射体2の反射波𝑔
𝑑ドップラ変調成分のレーダ波形
時間 アンテナ9 の電磁波伝搬速度 𝑣が既知である必要があり、伝搬速度が不均質なときには分解能が劣化 するが、比較的均質な速度構造を有するコンクリートでは有効である。媒質の伝搬速度は比 誘電率 𝜀𝑟 を用いて、以下により与えられる。 𝑣 = 𝑐/√𝜀𝑟 (2-2-1) ここで、 𝑐 は光速である。 簡単のため送受一体型のアンテナを考えると、レーダ波形における時間軸はアンテナと 反射体間の往復伝搬時間を表す。したがって、時間軸に 𝑣 2⁄ を乗じることにより、波形は アンテナから反射体までの距離 𝑙 の関数とみなせる。波形のある位置 𝑙 にピークが見られ たとき、これはアンテナを中心とした半径 𝑙 の球面上の任意の波源からの波であることを 示している。その波源の位置を推定するためのマイグレーション法を以下に示す。まず、イ メージングを行いたい領域のある点に仮想反射点(𝑥、𝑧)を仮定すると、𝑛番目のアンテナ位 置(𝑥𝑛, 0)からの片道距離 𝑅 は式(2-2)で表される。 𝑅(𝑥𝑛, 𝑥, 𝑧) = √(𝑥𝑛− 𝑥)2+ 𝑧2 (2-2-2) さらに、アンテナ位置 (𝑥𝑛, 0) で得られた受信波形を 𝑔(𝑥𝑛, 𝑡) と表記すると、ある仮想反射 点 (𝑥, 𝑧) から各アンテナ位置に到来する波の振幅は 𝑔(𝑥𝑛, 2𝑅/𝑣) と表される。したがって、 Fig. 2-2-1(b)のようにアンテナ位置を中心に距離𝑅の同心円状に波形振幅 𝑔(𝑥𝑛, 2𝑅/𝑣) を分 布させ、すべてのアンテナ位置で足し合わせれば、以下のような仮想反射点の評価関数が得 られる。 𝑢̇0(𝑥, 𝑧) = ∑ d d𝑡𝑔0̇ (𝑥𝑛, 2𝑅(𝑥𝑛, 𝑥, 𝑧) 𝑣⁄ ) 𝑁 𝑛=1 (2-2-3) 𝑢̇+(𝑥, 𝑧) = ∑𝑁𝑛=1𝑔+̇ (𝑥𝑛, 2𝑅(𝑥𝑛, 𝑥, 𝑧) 𝑣⁄ ) (2-2-4) ここで、 𝑢̇0(𝑥, 𝑧) 、 𝑢̇+(𝑥, 𝑧) はそれぞれ、無変調成分波形の時間微分とドップラ成分波形 に対応している。式(2-2-3)、(2-2-4)によって真の反射点では同一位相の反射波が足し合わさ れるため評価関数値は成長し、それ以外の場所では、位相がランダムに足し合わされること から評価関数値は低いままとなる。したがって、式(2-2-3)、(2-2-4)が無変調成分の時間微分 とドップラ成分に対応したイメージング画像となる。マイグレーション処理は空間的な相 関性による空間分解能の向上だけでなく、積算効果によるSN 比向上の効果の利点もあり、 イメージング画像のピーク位置から注目する鉄筋の反射体位置 (𝑥𝑟, 𝑧𝑟) をより高精度に特 定できる。また、本マイグレーション処理は線形演算であるため、反射波の振幅情報も保存
10 されていることから、反射体位置 (𝑥𝑟, 𝑧𝑟) での鉄筋の反射振幅を用いて、式(2-2-5)により鉄 筋の振動変位が得られる。これが、イメージングベースの鉄筋振動変位アルゴリズムである。 𝛿(𝑥𝑟, 𝑧𝑟) = 𝑣 | 𝑢̇+(𝑥𝑟,𝑧𝑟) 𝑢̇0(𝑥𝑟,𝑧𝑟)| (2-2-5) (a) レーダプロファイルの取得 (b) マイグレーション処理の概念 Fig. 2-2-1 レーダ測定と合成開口処理
走査方向
鉄筋
アンテナ
電磁波の放射
反射波
#1
#2
#3
アンテナ位置
孤立物体からの
受信反射波形
#1
#2
#3
時間
片道距離
#1
#2
#3
ア ンテ ナ位
置を中心に
同心円状に
受信振幅を
空間に分配
反射点位置の
振幅が成長
全ての受信波
形について同
様な処理を行
い積算
深さ
水平位置
11
第3章 計測システム
3-1 計測システム概要
単一周波数のセンシング波の受信波形 𝑒̇(𝑓、𝑡) からレーダ応答(すなわちインパルス応 答)を得るには、周波数 𝑓 を広帯域に掃引して、その伝達関数を計測し、逆フーリエ変換 をすればよい。ネットワークアナライザは送信信号と同一周波数の直交する 2 つの参照信 号と受信信号とを掛け合わせ、その低周波成分を取り出す(直交検波)ことで各周波数の複 素伝達関数を計測できる。低周波成分を取り出す際にはローパスフィルタが用いられるが、 その帯域幅をIF(Intermediate Frequency)帯域幅と呼び、IF 帯域幅を狭くすればするほど SN 比の高い計測が可能であるが、帯域幅に逆比例して計測時間がかかるという特徴を有する。 一方、本計測では 𝑓𝑣 のドップラ周波数遷移を起こした成分の複素伝達関数を計測すること が目的である。そのためには、送信信号が 𝑓 のとき、参照波を 𝑓 − 𝑓𝑣 とする必要がある が、ネットワークアナライザ内部の参照周波数と送信周波数は同一であり、基本的にはドッ プラ成分のみの計測は困難である。 そこで、送信信号にネットワークアナライザの外部で加振周波数を加え、 𝑓 − 𝑓𝑣 に変調 して送信アンテナから送信後、ドップラ効果によって周波数が 𝑓𝑣 だけ増加した周波数 𝑓 の成分を受信することにより、ネットワークアナライザを用いてドップラ計測を可能とし た。また、この際、ドップラ成分のみを計測するために、ネットワークアナライザの中間周 波数帯域幅であるIF 帯域幅は加振周波数より十分小さくしておく必要がある。12
3-2 ブロックダイアグラム
加振レーダ計測を行うためのネットワークアナライザを用いた加振レーダシステムのブ ロックダイアグラムを Fig. 3-1 に示す。また、本システムによるセンシング波の変調の流れ について以下に示す。 Fig. 3-1 計測システムのブロックダイアグラム13 センシング波の変調は以下のような流れとなる。 1. ネットワークアナライザの出力端子(OUT)から周波数 𝑓 で信号が送信される。このと き、送信周波数は単一周波数ではなく中心周波数からあるスパンで周波数を変更しな がら送信される。 2. 位相分配器で信号の位相を 0°と 90°に分配され、変調用発振器によって出力された周 波数𝑓𝑣で位相差が90°の信号がミキサで掛け合わされ、混合器で足しあわされることで ネットワークアナライザの周波数 𝑓𝑛 より加振周波数 𝑓𝑣 だけ変調された信号となる。 3. 変調された信号は送信側のアンテナよりセンシング波として出力され、励磁コイルに よって周波数 𝑓𝑣 で加振された計測対象によって反射し、ドップラ効果を受けて受信側 のアンテナで受信される。励磁コイルによって磁性体を加振する場合、励磁コイルに印 加される電圧の周波数の 2 倍の周期で振動をするため、実際に加振をするときは加振 用発振器の周波数は𝑓𝑣/2にする必要がある。 4. 受信された信号はネットワークアナライザにて取り込む。ネットワークアナライザは 受信側で直交検波を行うため、ネットワークアナライザの出力周波数からIF バンドの 幅10Hz でのみ取り込み、ドップラ成分以外の周波数成分を除去することが可能となる。
3-3 使用機器一覧
実験で使用した機器を以下に示す。 Table 3-1 使用機器 1 名称 メーカー名 型番 設定 Network Analyzer ROHDE& SCHWARZ ZVL-135 Center:5 GHz Span:8 GHz Power:-8 dBm IF Band Width:10 Hz Number of points:151 Modulation Oscillator NF 回路設計ブ ロック WF1973 Wave:Sine Phase:CH1=0°,CH2=88.5° Vibration Oscillator NF 回路設計ブ ロック WF1948 fv/2 Amplitude:2.88 Vp-p Wave:Sine14 Table 3-2 使用機器 2 名称 メーカー名 型番 定格 Exciting Coil サンヨー 株式会社 積層鋼板 材質:35H360A 積層数:100 枚 エナメル線 φ:1.2 mm 巻数:500 Power Amplifier NF 回路設計ブ ロック EC1000S AC-EXT Gain:100 RNG:100V Mixer Marki microwave ML1-0113 LO/RF:1.5~13 GHz IF:DC~2 GHz
Combiner Mini-Circuits ZFRSC-123+ Frequency Range:DC~12 GHz Termination Mini-Circuits ANNE-50+ Impedance:50 Ω
Frequency:DC~18 GHz Power
Amplifier2
Mini-Circuits ZVA-183+ Frequency:700 MHz~18 GHz Gain:26 dB
Digital Force Gauge
IMADA ZTS-50N-AN Capacity:50 N×0.01 N Accuracy:+/- 0.2 % Micro
Laser Sensor
Panasonic HL-G108-A-C5 Resolution : 2.5 m Distance of Center: 50 mm Measurement Range :±20 mm ADC CONTEC A1-1204Z-PCI
Actuator SUS Corporation XA-42L-300 XA-40H-200 XA-35L-100 計測に用いるアンテナであるボウタイスロットアンテナは、2 枚の銅板とセミリジットケ ーブルを用いて作成した。ボウタイスロットアンテナの寸法の概要図を Fig. 3-2 に、また実 際に作成したボウタイスロットアンテナの写真を Fig. 3-3 に示す。 また、計測時と同じ設定でキャリブレーションを行い空中で取得した周波数特性を Fig. 3-4 に示す。
15 Fig. 3-2 ボウタイスロットアンテナ寸法(上:上面,下:側面) Fig. 3-3 試作したボウタイスロットアンテナ Fig. 3-4 空中におけるアンテナの周波数特性 1 3 5 7 9 11 13 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0 Frequency[GHz] P ower[ dB ]
16
3-4 多周波加振システム
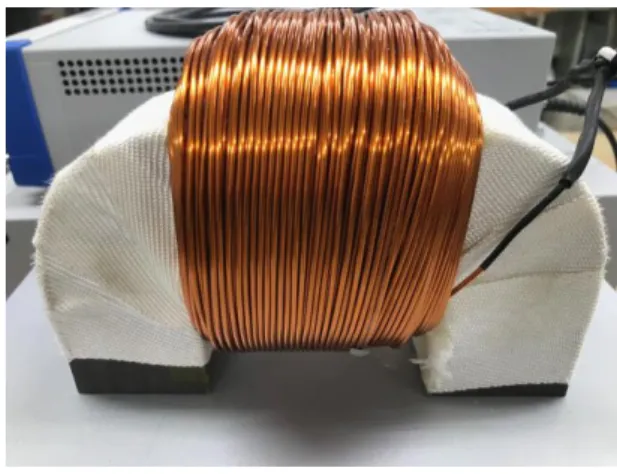
計測対象である鉄筋を加振させるために用いた多周波加振システムの概要について述べ る。励磁コイルは渦電流損低減のため積層鋼板構造となっており、材質 35H360A、厚さ 0.5 mm の板を 100 枚積層した構造になっている。また、コイルに巻いたエナメル線は、直径 φ:1.2 mm のポリアミドイミド銅線(AIW)を 500 回巻いて作成した。励磁コイルの写真を Fig. 3-5 に示す。 励磁コイルは抵抗値が 2.5 Ωであるものの、インダクタンスが 118 mH であり、交流電流 を印加するとコイルに大きな電圧が発生する問題がある。一方、加振は単一周波数である ため、コンデンサをコイルに直列に接続して直列共振回路を構成し、リアクタンス成分を 0 にすることで、インピーダンスを低下させることが可能となる。なお、鉄筋振動変位の 加振周波数依存性を測定するため、共振周波数をトグルスイッチによって変更できるよう 作成し、多周波加振システムを実現した。特に高い加振周波数での計測において、コンデ ンサ部分に非常に大きな電圧がかかるためコンデンサとして耐圧 2 kV、容量 1.5 Fn の Vishay 社 MKP386M515200YTY4 を 4 個並列接続したものを 5 個直列接続することで 12.8Arms までの電流を印可可能とし、加振周波数 500Hz 付近での計測を可能とした。な お、従来のシステムと同様に 10 Arms の電流を共振回路に印加した際にコンデンサ 1 つあ たりに流れる電流は 2.5 Arms であるが、共振回路に用いたコンデンサの定格電流は 24 Arms であり従来と同様の電流を流すことが可能である。共振回路の共振周波数はコンデン サの合成容量を C、コイルのインダクタンスを L とすると、式(3-4-1)によって求めること ができる。 𝑓 = 1 2𝜋√𝐿𝐶 (3-4-1) 直列共振回路の回路図を Fig. 3-6 に、写真を Fig. 3-7 また、システム全体図を Fig. 3-8 に示 す。Fig. 3-6 において直列共振回路と並列に 75 Ω の抵抗を接続したのは、アンプの電源を入17 れた際、直列共振回路はインピーダンスが無限大にみえるため開放状態と等価であり、定電 流源として動作するアンプの電圧制限によりシャットダウンすることや、また、印加オフ時 にコイルやコンデンサに溜まった電磁エネルギを熱として消費させるためである。なお、鉄 筋振動変位の加振周波数依存性を測定するため、共振周波数をトグルスイッチによって変 更できるよう作成し、スイッチ部分には高電圧がかかるため絶縁テープを用いて絶縁を行 った。また、LCR メータを用いて各スイッチを ON にした際の共振回路のインピーダンス 特性を測定した結果を Fig. 3-9 に示す。また、Table 3-4 に、直列共振回路の合成容量及び式 (3-4-1)より算出した共振周波数理論値、LCR メータによって測定された共振周波数、実際の 計測での加振周波数を示す。Table 3-4 より、理論値と、LCR メータによって測定した共振 周波数が異なっているが、LCR メータでインピーダンス特性を測定した際にコイルをコン クリート上に配置したため、コンクリート内部の鉄筋の影響を受けコイルのインダクタン スが変化したためであると考えられる。そのため、実際の計測における共振周波数は LCR メータによって測定した共振周波数と同様となる。また、それぞれの共振周波数の上下数 Hz 程度の加振周波数を用いて実験を行い、コイルに 10 Arms の電流を流すことができ、ノ イズレベルが低い結果が得られた周波数を計測時の加振周波数として採用した。 Table 3-4 共振回路共振周波数 ON になっている スイッチの数 合成容量 [μF] 共振周波数 理論値 [Hz] LCR メータによる 共振周波数 [Hz] 計測時 加振周波数 [Hz] 5 1 477 468 465 4 1.2 436 422 420 3 1.5 390 380 374 2 2 337 331 324 1 3 275 269 263 0 6 195 184 187 Fig. 3-6 直列共振回路図 𝑟 = 2 𝐿 = 11 𝑅1 = = 1 励磁コイル sw1 sw2 sw3 sw4 sw5 巻線抵抗 100層電磁鋼板コア 1.2mm径エナメル線500巻
18 Fig. 3-7 作成した直列共振回路
コンデンサ
抵抗
絶縁テープ
Fig. 3-8 励磁コイル加振システム全体図19 Fig. 3-9 共振回路周波数特性 0 20 40 60 80 100 50 150 250 350 450 550 P ow er[dB ] Frequency[Hz]
SW0個ON SW1個ON SW2個ON
20
第4章 供試体における鉄筋振動変位の加振周波数依存性
4-1 実験概要
実験に使用したモルタル供試体は、W150×H100×D300 mm の角柱であり、鉄筋径が D16 である。鉄筋までのかぶりが 2 cm 及び 4 cm の供試体を対象にネットワークアナライザを 用いて計測を行った。コイルには 8 Arms の電流を印加し、加振周波数は 56、187、263、324、 374、420、465 Hz の 7 種類で計測を行った。また、アンテナはコイル下部に配置し、アンテ ナとコイルの接触状況を一定に保ち、加振周波数ごとに無変調成分が変化しないようガム テープによって固定した。実験時の様子を Fig. 4-1 に示す。 Fig. 4-1 計測の様子21
4-2 かぶりの異なる供試体における振動変位加振周波数依存性
実験によって得られたかぶり2 cm の時間波形を Fig. 4-2、かぶり 4 cm の時間波形を Fig. 4-3 に示す。ドップラ成分は無変調成分と比較して 60 dB ほど小さいため、1000 倍して表示 している。本計測でのコンクリート中の電磁波の伝搬速度はコンクリートの誘電率を 9 と 仮定し、𝑣 = 1 0 × 108 m/sとした。Fig. 4-2、Fig. 4-3 をみると無変調成分において、伝搬距 離 1 cm 付近の位置にピークがみられる。このピークはアンテナ間を伝搬する直達波である と考えられ、振動由来のドップラ成分においては確認されない。また、無変調成分とドップ ラ成分のいずれにおいても鉄筋反射位置においてピークがみられた。ドップラ成分におい て直達波は確認されず、振動している鉄筋反射のみがピークとして確認されることから、振 動している鉄筋のみを明瞭に取得できていると考えられる。取得された鉄筋反射を用いて 振動変位を算出した結果を Fig. 4-4 に示す。Fig. 4-4 より、かぶり 2 cm の供試体においては 加振周波数が高くなるにつれて振動変位が増加していくような傾向がみられた。263 Hz に おいて若干振動変位が増加している点がみられるが、こちらはノイズの影響による振動変 位のばらつきによるものであると考えられ、かぶり 2 cm の供試体においては 500 Hz 程度ま での範囲では加振周波数が高くなるにつれて振動変位が増加するものであると考えられる。 また、かぶり 4 cm の供試体においてはおおむね加振周波数が高くなるにつれて振動変位も 増加する傾向がみられたが、420 Hz をピークとして 465 Hz においては振動変位が低下する 傾向がみられた。以上のことから鉄筋かぶりごとに振動変位の加振周波数依存性が異なり、 その要因としては鉄筋かぶりごとに供試体自身の構造的な共振周波数が異なることや、コ イルによる電磁界の分布が異なること、渦電流による影響等が考えられる。22 (a) 56Hz (b) 187Hz (c) 263Hz Fig. 4-2 かぶり 2cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
23 (d) 324Hz (e) 374Hz (f) 420Hz Fig. 4-2 かぶり 2cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
24 (g) 465Hz Fig. 4-2 かぶり 2cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4 5 6x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
25 (a) 56Hz (b) 187Hz (c) 263Hz Fig. 4-3 かぶり 4cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
26 (d) 324Hz (e) 374Hz (f) 420Hz Fig. 4-3 かぶり 4cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
27 Fig. 4-4 振動変位の加振周波数依存性 0 1 2 3 4 5 6 7 8 0 100 200 300 400 500 振動変位 [μm ] 加振周波数[Hz] かぶり2cm かぶり4cm (g) 465Hz Fig. 4-3 かぶり 4cm 時間波形(黒:無変調成分,赤:ドップラ成分) 0 5 10 15 20 0 1 2 3 4x 10 -3 伝搬距離[cm] A m pl it u de 時間波形
28
第5章 実構造物における低周波及び高周波加振による実証実験
4 章の結果より、鉄筋振動変位が加振周波数によって異なることが確認された。そのため、 本章では実構造物において従来の加振周波数である56 Hz 及び、高い加振周波数 480 Hz で の計測を行い、低周波と高周波において振動変位の変化を測定することで、実構造物におい て鉄筋振動変位の加振周波数依存性の確認を行う。5-1 実験概要
計測対象は Fig. 5-1-1 に示すような、実際に使用されていた橋梁の一部であり、劣化によ って一部鉄筋が露出しているものである。本計測はネットワークアナライザを用いて計測 を行い、計測点は錆汁のようなものが見える鉄筋 4、5 及び劣化により付近のコンクリート が剥離している鉄筋 9 とし、いずれもかぶり 1.5 cm ほどである。ひび割れ等による不要反 射波の影響により、振動変位がばらついてしまうためマイグレーション処理によって精度 の高い計測を行った。マイグレーション処理を行うため、Fig. 5-1-2 に示すようなアクチュ エータによる移動機構を用いて鉄筋に直交する方向に 5 mm 間隔で 60 mm スキャンした。 なお、本計測は計測点が多く計測時間短縮のため、加振周波数は現システムで最も低い 57 Hz および最も高い 480 Hz とし、コイルに印加した電流は 5 Arms 程度とした。29 (a) 全体図
(b) 鉄筋 4,5 Fig. 5-3 計測対象
30 (c) 鉄筋 9 Fig. 5-1-1 計測対象
Fig. 5-1-2 移動機構による計測の様子
31
5-2 実構造物における低周波および高周波加振による振動変位
・鉄筋 4
鉄筋4 は錆汁が確認されたが見かけ上最も劣化の少ない鉄筋である。Fig. 5-2-1 に 57 Hz で 移動計測を行った際に得られた無変調成分、ドップラ成分のレーダ波形を並べたレーダプ ロファイルをそれぞれ示す。図より埋設物に対して垂直に移動計測することで 0.7 ns 付近に 鉄筋反射のプロファイルが得られている。また、ドップラ成分の信号強度は直流成分と比較 して 60 dB ほど小さく、SN 比が大きく低下していることもわかる。Fig. 5-2-2 に移動計測に よって得られた加振周波数 57 Hz、480 Hz における直流成分とドップラ成分のマイグレーシ ョン後の断面イメージを示す。マイグレーション前後の図を比較すると、マイグレーション 後のほうが明瞭に鉄筋をイメージングできていることがわかる。また、鉄筋反射のピークの 位置が実際のかぶりである 15 mm より深い位置に確認できるが、これは計測時に移動機構 の治具がコンクリートの抵抗を受け、一定の動きができなかったためであると考えられる。 マイグレーション後の断面イメージから鉄筋反射位置のピークを用いて振動変位を算出す ると、57 Hz の振動変位は 4.53 m、480 Hz は 7.64 m であり、480 Hz のほうが 56 Hz より も約 68.5 %大きな振動変位が得られた。 Fig. 5-2-1 鉄筋 4 マイグレーション前レーダプロファイル32
・鉄筋 5
鉄筋 5 は見かけ上錆汁が最も確認された鉄筋である。Fig. 5-2-3 に移動計測によって得ら れた加振周波数 57 Hz、480 Hz における直流成分とドップラ成分のマイグレーション後の断 面イメージを示す。Fig. 5-2-3 をみると鉄筋反射のピークの位置が実際のかぶりである 15 mm より深い位置に確認できるが、これも鉄筋 4 と同様の理由であると考えられる。マイグ レーション後の断面イメージから鉄筋反射位置のピークを用いて振動変位を算出すると、 57 Hz の振動変位は 17.1 m、480 Hz は 23.2 m であり、480 Hz のほうが 56 Hz よりも約 35.5 %大きな振動変位が得られた。 (a)加振周波数 57Hz (b) 加振周波数 465Hz Fig. 5-2-2 鉄筋 4 マイグレーション後断面イメージ33
・鉄筋 9
鉄筋9 は付近のコンクリートが剥離しているが、鉄筋自身は露出していない。Fig. 5-2-4 に移動計測によって得られた加振周波数 57 Hz、480 Hz における直流成分とドップラ成分の マイグレーション後の断面イメージを示す。Fig. 5-2-4 をみると鉄筋反射のピークの位置が 実際のかぶりである 15 mm より深い位置に確認できるが、これも鉄筋 4 と同様の理由であ ると考えられる。マイグレーション後の断面イメージから鉄筋反射位置のピークを用いて 振動変位を算出すると、57 Hz の振動変位は 4.82 m、480 Hz は 7.03 m であり、480 Hz の ほうが 56 Hz よりも約 45.8 %大きな振動変位が得られた。 (a) 加振周波数 57Hz (b) 加振周波数 465Hz Fig. 5-2-3 鉄筋 5 マイグレーション後断面イメージ34 Table 5-2-1 に以上の計測で得られた振動変位のまとめを示す。これをみるといずれの鉄筋に おいても57 Hz よりも 480 Hz のほうが大きな振動変位が得られた。鉄筋 5 において最も大 きな振動変位が得られたが、この要因として、鉄筋5 は錆汁が最も多く目視された鉄筋であ り、コンクリート内部の劣化が激しいものであると予想される。そのため、コンクリート内 部においてひび割れなどの劣化が起きており、鉄筋とコンクリートの付着力が弱まること で大きな振動変位が得られたと考えられる。また、鉄筋によって低周波と高周波の振動変位 の比が異なることから、実構造物において振動変位の加振周波数依存性があることがわか る。 (a)加振周波数 57Hz (b) 加振周波数 465Hz Fig. 5-2-4 鉄筋 9 マイグレーション後断面イメージ
35 Table 5-2-1 振動変位まとめ[µm] 57Hz 480Hz 増加率[%] 鉄筋 4 4.53 7.64 68.5 鉄筋 5 17.1 23.2 35.5 鉄筋 9 4.82 7.03 45.8
36
第6章 腐食時における振動変位の加振周波数依存性
第 5 章の結果より、実構造物においても加振周波数によって鉄筋振動変位が変化する現象 が認められた。また、その振動変位がコンクリート内部の状況に依存している可能性も示唆 された。以上より、本章において電食実験を行い、その際の振動変位の変化をモニタリング することで、鉄筋が腐食した際の鉄筋振動変位の加振周波数依存性の変化を確認し、劣化診 断における適切な加振周波数の検討を行う。6-1 電食実験の原理
6-1-1 鉄筋腐食の原理 ここでは、電食実験の説明に先立ち、鉄筋コンクリート構造物内部の鉄筋が腐食する原理 について述べる。 コンクリート内部は高アルカリ環境となっており、鉄筋表面は厚さ2-6 nm の緻密な水酸 化物(γ𝐹𝑒2𝑂3∙ 𝑛𝐻2𝑂)から成る不働態被膜を形成することで、腐食因子との接触から保護さ れている。しかし、中性化によるアルカリ度の低下や、コンクリート中に塩化物イオン 𝑙− などの有害成分が浸透することで、鉄筋は不働態被膜を維持できなくなり、鉄筋が活性化し て腐食が進行しやすくなる。したがって、鉄筋コンクリート構造物中の鉄筋の腐食は、コン クリートの中性化や中性化が主な原因となり引き起こされるといえる。鉄筋の不働態被膜 が破壊されると鉄筋表面に局部電池が形成され、電気化学的反応により陽極である鉄筋か ら鉄イオン(𝐹𝑒2+)がコンクリート中に溶け出し、鉄筋の腐食が進行する。ここで、コンク リート内部で引き起こされる反応について以下に化学反応式で示す。 陽極反応𝐹𝑒 → 𝐹𝑒
2++ 2𝑒
− (6-1) 陰極反応𝑂
2+ 2𝐻
2𝑂 + 4𝑒
−→ 4𝑂𝐻
− (6-2) さらに、式(6-1)で示した鉄イオンは、式(6-2)で示した水酸化物イオンと反応することで、 以下のようになる。2𝐹𝑒
2++ 4𝑂𝐻
−→ 2𝐹𝑒(𝑂𝐻)
2 (6-3)2𝐹𝑒(𝑂𝐻)
2+
1 2𝑂
2+ 𝐻
2𝑂 → 2𝐹𝑒(𝑂𝐻)
3(6-4)
2𝐹𝑒(𝑂𝐻)
3→ 𝐹𝑒
2𝑂
3+ 3𝐻
2𝑂
(6-5) または2𝐹𝑒(𝑂𝐻)
3→ 2 eOO + 3𝐻
2𝑂
(6-6) 式(3-6)で示したように 𝐹𝑒(𝑂𝐻)2 が鉄筋表面に発生する。この化合物が酸化し、式(6-4)のよ うに水酸化第二鉄 𝐹𝑒(𝑂𝐻)3 になる。その後、水分を失うことで式(6-5)に示したような赤 錆(𝐹𝑒2𝑂3)または式(3-9)のような水和酸化物(𝐹𝑒𝑂𝑂𝐻)となる。また一部は酸化不十分の37 ままFe3O4(黒錆)となって鉄表面に錆層を形成する。 コンクリートの劣化過程をFig. 6-1-1 にフローチャートで示す。 Fig. 6-1-1 コンクリートの劣化過程 Fig. 6-1-1 で示した流れで鉄筋コンクリート内部の鉄筋腐食は進行し、構造物の耐久力低下 に至る。 6-1-2 電食実験 電食実験では、先ほど述べた反応を意図的に起こし電流値および通電時間を調節するこ とで鉄筋の腐食量を制御する。Fig. 6-1-2 に電食実験の概要図を示す。 Fig. 6-1-2 電食実験概要図
38 Fig. 6-1-2 に示したように鉄筋をアノード、銅版をカソードとして両者の間に電流を印加す ることで、鉄筋の腐食を進行させるものである。
6-2 実験概要
Fig. 6-2-1 に実際の状況を示す。実験に使用した RC 供試体は W100×H100×D400 mm の 角柱であり、鉄筋かぶり 4 cm、鉄筋径が D16 である。Fig. 6-1-2 のような状況で供試体下面 の中央部に 10 %食塩水に浸したスポンジを接触させ、局所的に食塩水を導入した。また、 直流定電圧源を用いて食塩水中の銅板に陰極、鉄筋端部に陽極を接続し 80 V の電圧を印加 した。なお、電流を一時間ごとに止め、電食を停止している間に周波数ごとの振動変位を測 定し再導通を行い、これを 30 回繰り返した。本計測は加振パルスドップラレーダシステム を用いた。また、実験時は電食及び加振の影響により鉄筋が過熱される。実験前後の供試体 の温度変化を Fig. 6-2-2 に示す。 Fig. 6-2-1 電食実験状況39 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 19.9 20.1 25 21.8 25.7 23.2 28.1 23.3 29.1 24.8 32.1 32.4 26 39.4 32.5 26.7 32.1 33.4 26.5 37.3 33.7 27.1 32.6 34.3 26.5 33 33 26.2 31.6 34.9 26.4 38.1 (a) 1日目 温度変化 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 24.2 19 22.1 26.5 21.4 30.6 32.1 22.9 29.3 33.8 25 38.1 37.1 26.4 34.4 36.9 27.4 40.8 38.6 27.6 35.9 38.3 27.3 39.6 39 27.6 36.1 38.4 28.1 42.1 30.4 24.1 26.2 31.3 24.3 33.3 35.4 26 31.7 35.6 26.9 37.2 (b) 2 日目 温度変化 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 28.2 21.6 26.1 30.6 23.4 34.4 37 23.6 36 36.9 26.4 40.3 (c) 3 日目 温度変化
40 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 27.3 21.4 24.6 28.9 22.3 29 35 25.7 30.6 35.1 26.8 34.6 38.4 28.8 33.8 39.5 29.9 39.3 40.6 29.7 36.6 39.8 30.5 39.2 39.5 30.3 35.6 39.4 30.4 39.3 (d) 4 日目 温度変化 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 24.9 19.9 22.3 25.4 20.5 27.9 30.7 23.9 27.7 33.5 25.3 33.8 34.9 26.9 31.1 34.9 27 34.9 36.7 27.9 32.6 36.4 28.9 37.4 (e) 5 日目 温度変化 計測前 計測後 コンクリ側面 鉄筋端 アンテナ コンクリ側面 鉄筋端 アンテナ 23.3 16.1 19.6 25.1 18.5 24.2 33.8 20 37.7 34.1 20.2 33.4 39.8 24 31.9 38.2 24.3 37.9 42.2 27.7 34.4 40.12 28.4 40 38.9 27.6 34.7 39.5 28.8 39.6 44.5 27.8 48.4 42.1 28.3 42.6 43.2 25.1 36.7 41.7 26.6 43.3 (f) 6 日目 温度変化
41
6-3 電食実験時における振動変位加振周波数依存性
電食開始から約 17 時間後、積算電流にすると 3.30 A・h の段階でコンクリート表面にひび 割れが確認された。ひび割れが起きた際の供試体の様子を Fig. 6-3-1 に示す。Fig. 6-3-1 をみ ると、コンクリート上面からひび割れが進展している様子が見られる。また、電食開始から 約 26 時間後、積算電流にすると 5.48 A・h の段階でコンクリート側面からの錆汁の漏出が みられた。その際の供試体の様子を Fig。6-3-2 に示す。また、実験によって得られた時間波 形を Fig. 6-3-3 に示す。電食開始から 6 時間後の 263 Hz、7 時間後の 187 Hz、263 Hz、8 時 間後の 263 Hz において大きなノイズの混入がみられたため、これらの値は考慮しない。Fig. 6-3-3 をみると、0.8 ns 付近が鉄筋からの反射波であるが、電食開始前の健全状態において 1.8 ns 付近にも反射波がみられている。この反射波に注目すると、ひび割れが確認された 17 時間後の時点に近づくにつれて小さくなっていることがわかる。この反射波はコンクリー ト内部からの反射であり、鉄筋腐食が進むにつれて小さくなっていることから、腐食に伴う コンクリート内部の変状をとらえている可能性がある。 Fig. 6-3-1 ひび割れ確認時の様子42
43 (a) 0 時間目から 4 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 56H z:5. 44[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 187H z:6. 92[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 263H z:6. 85[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 324H z:7. 81[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 374H z:8. 01[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 420H z:8. 12[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 465H z:7. 24[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 56H z:6. 02[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 187H z:8. 27[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 263H z:8. 83[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 324H z:6. 77[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 374H z:6. 25[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 420H z:5. 54[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 465H z:5. 06[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 56H z:6. 53[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 187H z:8. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 263H z:8. 68[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 324H z:6. 98[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 374H z:6. 01[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 420H z:3. 83[um ] 0 1 2 3 4 0 0. 05 0. 1 Ti m e [ns ] Am pli tud e [m V] 465H z:3. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 56H z:6. 81[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 187H z:9. 07[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 263H z:8. 98[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 324H z:7. 91[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 374H z:5. 04[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 420H z:4. 72[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 465H z:4. 55[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 56H z:7. 49[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 187H z:8. 02[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 263H z:7. 55[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 324H z:8. 71[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 374H z:8. 29[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 420H z:4. 75[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 Ti m e [ns ] Am pli tud e [m V] 465H z:5. 01[um ]
加振周波数
経過時間
44 (b)5 時間目から 10 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 7. 54[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 7. 15[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 8. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 7. 84[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 6. 51[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 4. 44[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 4. 46[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 7. 52[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 8. 49[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 11. 94[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 7. 90[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 6. 35[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 5. 36[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 4. 77[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 7. 52[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 15. 12[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 11. 60[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 7. 19[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 8. 18[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 6. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 4. 79[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 7. 10[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 9. 77[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 16. 61[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 7. 63[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 6. 18[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 5. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 4. 93[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 6. 92[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 9. 18[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 7. 54[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 6. 85[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 7. 32[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 5. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 6. 44[um ]
加振周波数
経過時間
45 (d)18 時間目から 23 時間目まで 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 56H z:9. 41[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 187H z:11. 19[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 263H z:11. 46[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 324H z:10. 48[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 374H z:11. 08[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 420H z:10. 22[um ] 0 1 2 3 4 0 0.05 0.1 Tim e [ns ] Amplitude [mV] 465H z:9. 00[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 56H z:9. 53[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 187H z:12. 51[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 263H z:12. 40[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 324H z:12. 34[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 374H z:12. 98[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 420H z:10. 89[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 465H z:10. 52[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 56H z:10. 63[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 187H z:13. 27[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 263H z:14. 20[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 324H z:11. 68[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 374H z:12. 75[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 420H z:12. 37[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 465H z:10. 71[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 56H z:10. 17[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 187H z:13. 57[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 263H z:14. 08[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 324H z:12. 80[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 374H z:13. 22[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 420H z:11. 30[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 465H z:10. 59[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 56H z:11. 23[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 187H z:12. 70[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 263H z:15. 93[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 324H z:14. 09[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 374H z:13. 15[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 420H z:12. 57[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 465H z:11. 29[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 56H z:12. 62[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 187H z:14. 47[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 263H z:17. 12[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 324H z:16. 21[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 374H z:13. 83[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 420H z:13. 68[um ] 0 1 2 3 4 0 0.05 0.1 0.15 Tim e [ns ] Amplitude [mV] 465H z:12. 07[um ] (e)11 時間目から 15 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 6. 83[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 9. 52[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 6. 91[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 6. 24[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 6. 56[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 6. 18[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 5. 75[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 6. 22[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 9. 40[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 6. 94[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 6. 80[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 5. 82[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 5. 15[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 4. 93[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 7. 50[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 9. 75[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 7. 30[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 6. 71[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 6. 70[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 6. 70[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 5. 78[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 6. 88[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 8. 72[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 8. 01[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 7. 05[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 5. 16[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 4. 83[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 4. 42[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 7. 55[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 9. 48[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 8. 00[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 8. 13[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 5. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 5. 72[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 4. 78[um ]
加振周波数
経過時間
46 (e)16 時間目から 20 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 7. 06[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 8. 80[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 7. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 5. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 6. 98[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 5. 89[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 4. 97[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 7. 10[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 9. 79[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 7. 38[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 7. 62[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 5. 68[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 5. 23[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 6. 37[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 7. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 10. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 9. 12[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 9. 26[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 6. 77[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 6. 90[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 6. 53[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 9. 41[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 11. 19[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 11. 46[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 10. 48[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 11. 08[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 10. 22[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 9. 00[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 9. 53[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 12. 51[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 12. 40[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 12. 34[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 12. 98[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 10. 89[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 10. 52[um ]
加振周波数
経過時間
47 (f)21 時間目から 25 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 10. 63[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 13. 27[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 14. 20[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 11. 68[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 12. 75[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 12. 37[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 10. 71[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 10. 17[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 13. 57[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 14. 08[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 12. 80[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 13. 22[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 11. 30[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 10. 59[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 11. 23[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 12. 70[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 15. 93[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 14. 09[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 13. 15[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 12. 57[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 11. 29[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 12. 62[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 14. 47[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 17. 12[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 16. 21[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 13. 83[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 13. 68[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 12. 07[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 11. 03[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 14. 57[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 17. 04[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 15. 69[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 12. 17[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 12. 62[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 12. 73[um ]
加振周波数
経過時間
48 (g)26 時間目から 30 時間目まで Fig. 6-3-3 電食実験時間波形 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 12. 84[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 16. 74[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 17. 05[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 14. 64[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 13. 62[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 14. 66[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 13. 74[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 13. 00[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 19. 58[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 18. 01[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 18. 67[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 13. 94[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 17. 13[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 15. 21[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 56H z: 15. 39[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 187H z: 20. 35[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 263H z: 20. 37[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 324H z: 22. 44[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 374H z: 14. 23[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 420H z: 17. 27[um ] 0 1 2 3 4 0 0. 05 0. 1 T im e [ns ] Am pli tud e [m V] 465H z: 16. 55[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 14. 42[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 19. 01[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 22. 36[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 20. 17[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 18. 81[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 18. 44[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 16. 76[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 56H z: 15. 14[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 187H z: 19. 49[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 263H z: 23. 60[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 324H z: 23. 73[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 374H z: 21. 60[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 420H z: 20. 81[um ] 0 1 2 3 4 0 0. 05 0. 1 0. 15 T im e [ns ] Am pli tud e [m V] 465H z: 18. 85[um ]
加振周波数
経過時間
49 次に、Fig. 6-3-4 に鉄筋腐食に伴う振動変位の加振周波数依存性を示す。電食開始から 1 時 間後に特に高い加振周波数において振動変位振動変位の低下がみられる。これは、電食を行 ったことにより鉄筋が発熱し、特に高い加振周波数において加振の影響により、さらに鉄筋 が発熱し膨張したためであると考えられる。電食を行わない状態のコンクリート側面の温 度は 20 度程度であるが、電食を行うことにより 40 度ほどまで温度が上昇することから、 コンクリート内部は非常に高温になっていると考えられる。Fig. 6-3-4 より、コンクリート 表面においてひび割れが確認された積算電流 3.30 A・h 以前は電食が進むにつれて振動変位 は横ばいか若干低下するような傾向がみられた。この傾向は鉄筋腐食に伴う腐食生成物の 影響により鉄筋周辺の膨張圧が増加したためであると考えられる。また、ひび割れが確認さ れた積算電流 3.30 A・h の直前から振動変位の増加がみられた。これは、コンクリート内部 においてひび割れが進展し、腐食生成物による膨張圧が解放されたためであると考える。な お、ひび割れ直前の積算電流 2.44 A・h の時点で加振周波数 324 Hz において顕著な振動変 位の低下がみられ、それ以降は増加していく傾向がみられた。このことから加振周波数 324 Hz においてコンクリート内部の劣化をとらえている可能性がある。 電食開始時、ひび割れ前、ひび割れ時、電食終了時としてそれぞれ積算電流 0、1.57、3.30、 6.86 A.h での加振周波数ごとの振動変位を Fig. 6-3-5 に示す。Fig. 6-3-5 の電食開始時と Fig.
Fig. 6-3-4 振動変位加振周波数依存性 0 5 10 15 20 25 30 0 1 2 3 4 5 6 7 振 動変位 [μ m ] 積算電流[A・h] 56Hz 187Hz 263Hz 324Hz 374Hz 420Hz 465Hz
50 4-3 をみると、いずれも加振周波数 420 Hz において振動変位が最大となっており、かぶりが 同様であることから振動変位の加振周波数依存性に鉄筋かぶりが影響している可能性が示 唆される。また、ひび割れ前の振動変位をみると、開始時と比較して高い加振周波数で低下 している。これは高い加振周波数において熱によって鉄筋が膨張し、拘束力が強くなったた めであると考えられる。また、いずれの段階においても振動変位が最も大きくなる加振周波 数が異なっていることがわかる。 健全状態と鉄筋が腐食した状態での振動変位の比より、鉄筋腐食評価に適している加振周 波数の評価を行う。この比が大きいほど腐食状態での振動変位の増加率が大きいため、鉄筋 腐食評価に適していると考える。Fig. 6-3-6 に、加振周波数ごとの健全状態と腐食状態の振 動変位の比を示す。なお電食時に発生する熱による振動変位の低下を考慮し、電食開始時の 振動変位として、電食開始から 1 時間後の振動変位を用いた。Fig. 6-3-6 を見ると、420 Hz においてこの比が最も大きくなっている。そのため、小さい劣化で大きな振動変位の変化が みられるため、鉄筋腐食評価において加振周波数 420 Hz を用いて加振レーダ計測を行うこ とで最も小さな劣化をとらえることができると考える。なお、鉄筋かぶりによっても振動変 位の加振周波数依存性が異なることから、計測対象の構造によってもこの適切な加振周波 数は変化すると考えられる。 Fig. 6-3-5 健全状態振動変位加振周波数依存性 4 8 16 32 0 100 200 300 400 500 振動変位 [μm ] 加振周波数[Hz] ①健全 ②ひび割れ前 ③ひび割れ時 ④電食終了時
51 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 0 100 200 300 400 500 振 動変位 の比 加振周波数[Hz] Fig. 6-3-6 健全状態と腐食状態の振動変位比

![Fig. 6-3-4 振動変位加振周波数依存性 051015202530012345 6 7振動変位[μm]積算電流[A・h]56Hz187Hz263Hz324Hz374Hz420Hz465Hz](https://thumb-ap.123doks.com/thumbv2/123deta/6270506.1094353/49.892.137.761.578.998/Fig634振動変位加振周波数依存性動変積算電流AhHzHzHzHzHzHzHz.webp)