1
目次
第 1 章 序論 2 1.1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 1.2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 第 2 章 実験装置 5 2.1 SPIDER 駆動精密ステージへの応用・・・・・・・・・・・・・・・・・・・5 2.2 SPIDER の動作原理・・・・・・・・・・・・・・・・・・・・・・・・・・7 2.3 アクティブ除振台・・・・・・・・・・・・・・・・・・・・・・・・・・・9 第 3 章 システム同定法 11 3.1 システム同定・・・・・・・・・・・・・・・・・・・・・・・・・・・・・11 3.2 ARX モデル・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・11 3.3 システム同定法・・・・・・・・・・・・・・・・・・・・・・・・・・・・12 3.3.1 最小二乗法(LS 法)・・・・・・・・・・・・・・・・・・・・・・12 3.3.2 逐次最小二乗(RLS)法・・・・・・・・・・・・・・・・・・・・・・15 3.3.3 可変忘却要素を用いた逐次最小二乗(VFF-RLS)法・・・・・・・・・・18 3.3.4 部分空間法に基づく多入力多出力(MIMO)同定法・・・・・・・・・20 3.4 システム同定実験・・・・・・・・・・・・・・・・・・・・・・・・・・・・24 第 4 章 統合化設計のための制御法 48 4.1 内部モデル制御系(IMC)・・・・・・・・・・・・・・・・・・・・・・・・48 4.2 外乱オブザーバに基づく内部モデル制御系(DIMC)・・・・・・・・・・・・51 4.2.1 高次の外乱に対する外乱応答・・・・・・・・・・・・・・・・・・54 4.2.2 高次の外乱に対する補償法・・・・・・・・・・・・・・・・・・・55 4.2.3 モデル化誤差の検証・・・・・・・・・・・・・・・・・・・・・・59 4.3 直接速度フィードバック補償を用いた DIMC 制御系・・・・・・・・・・・・63 4.4 非干渉制御系・・・・・・・・・・・・・・・・・・・・・・・・・・・・・65 第 5 章 制御実験 67 5.1 DIMC へ適応同定を導入・・・・・・・・・・・・・・・・・・・・・・・・・67 5.2 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・69 5.3 統合化設計法を用いた制御実験・・・・・・・・・・・・・・・・・・・・・・73 第 6 章 まとめ 76 6.1 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・76 参考文献 77 発表文献 80 謝辞 812 参考文献 40
第1章 序論
1.1 背景と目的
1.1.1 背景
図 1.1.1 国際半導体技術ロードマップ(ITRS2007) 昨今の急速な半導体製造技術の革新によって、製造プロセスの表記もμm(マイクロメー トル)から nm(ナノメートル)に移行している。2007 年の国際半導体技術ロードマップ (ITRS2007)によると、DRAM の最密層回路パターンのハーフピッチサイズは、2010 年には 40nm、 2020 年には 14nm に達すると予測されている。シリコンウェハーに回路パターンを作り上げ る際には、光を用いてガラス板上に描かれた回路パターンをシリコンウェハー上に転写す る必要がある。その際、用いる光の波長が十分に短くないと、細かな回路パターンを転写で きない。しかし、露光装置分野では現在主流である波長 193nm の ArF エキシマレーザが光 源として用いられており、液浸技術により 45nm ノードまで達成されているが、ナノ領域で の LSI 加工には不十分である。 そこで注目されているのが、電子ビームを用いて回路パターンをウェハ上に描画していく 電子線(EB)露光装置である。 一方、ステージ開発の分野では、精密ステージ用アクチュエータとして、 ・ステッピングモータ ・共振特性を用いた超音波モータ ・電磁式リニアモータLSI manufacturing
Technology nodes
(DRAM half pitch)
Technology nodes
(MPU/ASIC half pitch)14
59 nm
40
nm
2008
2011
2020
laser
e-beam
85
nm
70
nm
laser
e-beam
85
nm
85
nm
70
nm
70
nm
ITRS 2007
2014
28 nm
LSI manufacturing
Technology nodes
(DRAM half pitch)
Technology nodes
(MPU/ASIC half pitch)Technology nodes
(DRAM half pitch)
Technology nodes
(MPU/ASIC half pitch)14
59 nm
40
nm
2008
2011
2020
laser
e-beam
85
nm
85
nm
70
nm
70
nm
laser
e-beam
85
nm
85
nm
70
nm
70
nm
ITRS 2007
2014
28 nm
3 上の 3 種類が主流となっている。ステッピングモータは、構造及び制御が簡単で、低コス トであるがステップ角に起因した分解能制限やトルクリップルがあり、高精度化には補助 アクチュエータなどを用いなければならない。また、変換機構を持たない電磁式リニアモ ータは高速、高応答、非接触でクリーンであることから現在の主流となっているが、次世 代 EB 露光においては磁気シールドや冷却装置、真空雰囲気などを考慮した対応が不可欠 である。これに対して、共振特性を用いた超音波モータは、非磁性、低発熱かつ高剛性と いう特徴を持つが、共振利用に起因した無駄時間や精度劣化、摩擦駆動に起因した摩耗と いう問題がある。 このような背景のもと、次世代 EB 露光への応用を目的に、有限会社 熊本テクノロジ
ー社は超精密ステージ駆動用アクチュエータSPIDER(Syncronous PIezoelectricDevice
drivER) (9)を新たに開発した。非共振型超音波モータは従来の超音波モータとは異なり、 共振特性を使用しないため、原理的には、任意の位置でアクチュエータを位置決めするこ とが可能である。また電磁力を用いないため磁気ノイズ特性に優れている為将来的に EB が転写用光源として用いられるようになった際有効である。 また、昨今の急速な技術革新化、電子機器の性能は向上し、高速・高応答・高精度特性を有 する製品が市場に広まり、半導体露光装置用精密ステージの位置決め制御やそれを搭載す る除振台の振動制御への高い制御性能が要求される。 こうした半導体の微細化・高集積化とともに問題となるのが、コストの上昇である。微細 化のためには、露光光源を短波長化するか、投影レンズの N.A.(開口数:投影レンズの明 るさ)を大きくした露光装置が必要で、半導体メーカーにとっては新たな投資となる。微細 化により上昇する露光コストは、生産性を上げることで相殺されるため、精度を確保しなが らステージ速度を向上させ、大量生産することが不可決である。このため、位置決め時に発 生する駆動反力による、精密ステージを搭載する除振台装置の振動が問題となる。現在、こ の振動をステージ可動部の移動とは逆方向にカウンターマスを移動させることで、駆動反 力を相殺している。このカウンターマスの設置により、半導体製造用超精密ステージは大型 化している。例えば、12 インチウェハの生産プロセスではストロークが 300mm でスキャ ン速度500mm/秒(世界最高速)、1 時間あたり 100 枚以上のスループットである。また、 外部からの振動に対しては除振台装置を用いること制御している。 しかしながら、2つの制御系を別々に制御しているため制御遅れ、干渉等により制御性が 悪く、高コストである。カウンターマスを用いた精密ステージの例を図1.1 に示す。カウン ターマスはステージ可動部とは逆方向に同じ大きさの力で動くことにより、ステージ駆動 時に発生ずる振動を相殺する錘のことである。 将来的には、精密ステージ位置制御の観点から見ると、主に以下の制御特性が要求される。 製品スループット向上のための高速・高応答特性 位置センサ分解能内への高精度位置決め特性 オンサイトセットアップのための少ない設計パラメータ数
4 経年変化に対する制御性能の保持 以上のように高い制御性能が要求される産業分野では、各種制御理論が応用されている が、設計法および調整法が困難である場合が多く、またこれらの系ではフィードバック制御 を前提とした制御系で構築されていることが多い。フィードバック制御では、観測される制 御量の結果を受け取ってから誤差を修正するため、修正動作が後追いになってしまい、目標 値の応答性において、所望の特性を満たさない場合がある。さらに、制御量が所望の状態に あったとしてもセンサなどの検出器にノイズが存在した場合、フィードバックループによ りノイズ増幅し、系が発散する場合もある。そこで近年では実現が容易で、安定性において 優れるフィードフォワードを基本とした制御系に対する需要が高まっている。
1.1.2 目的
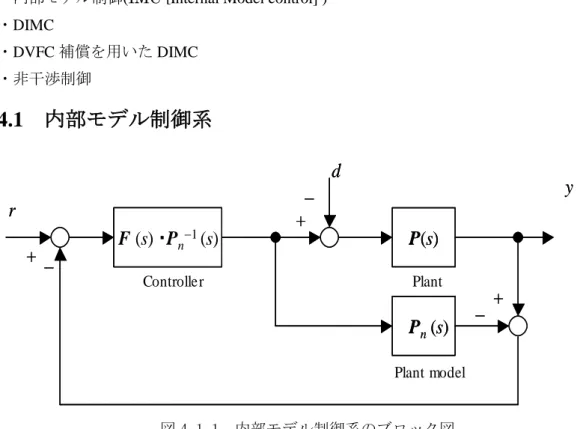
本研究の目的は、以下の2つである。まず、SPIDER の同定に可変忘却要素を用いた逐次 最小二乗法を用いることで外乱オブザーバ付き内部モデル制御系に適応機構を導入すし、 モデルを変化させた状態で実験することによって、適応機構の有効性を検証すること。プ ランとモデルの間に誤差が存在する場合、システムの応答は劣化してしまう。しかし、現 実的にはモデル化誤差が存在しないシステムは存在しない。そこで、モデルに対して適応 機構を導入することが望ましい。これにより、経年劣化によるモデルのパラメータの再チ ューニングを行う必要がなくなり、保守・コストの面でも有益である。 そして、精密ステージ駆動時に発生する振動や外部振動に関する問題を解決するために、 位置制御系に加え駆動反力制御系を統一的に設計する手法を提案する。提案制御手法によ り駆動されるステージが搭載された除振台装置自身が振動を発生させないよう、カウンタ ーマスを用い、ステージの駆動反力を相殺する制振制御系と、外部からの振動を装置に伝 えないように振動を減衰させる制御系の2つの制御、すなわち、装置自身からの振動と外 部からの振動を同時にカウンターマスにより制御させることを目標とする。5
第 2 章 実験装置
2.1 SPIDER 駆動精密ステージ
図 2.1.1 ハードウェア構成図 本研究に用いた実験装置の構成図を図 2.1 に示す。ホスト PC から送られた入力指令は、 PCI スロットに装着したパラレル IO カードを利用して、サーボインターフェスユニット(モ ーションコントローラ)、アンプを通して SPIDER に送信される。ここのアンプにおいて入 力指令電圧は、130/10 倍(以下 13 倍)されて送られる。また、エンコーダ及びリミットセ ンサよりステージの位置情報ストロークリミット情報が読み込まれ、ホスト PC に送られる。 ホスト PC には OS として Windows98 を搭載した PC を用い、VisualC++により実行プログラムを作成している。I/F カードには Interface Corporation 製 16/16bitI/O PCI ボード PCI-2735 を使用している。圧電素子を使用しているアクチュエータを含むステージシステムは 熊本テクノロジー、太平洋セメント社らの共同研究により開発された。 図 2.1.2 精密ステージ 図 2.1.3 アクチュエータ(SPIDER)拡大図
Linear encoder
Linear
guide
Limit
sensor
SPIDER
Stage
Scale
PC
with servo system
Motion controller
control input
position
signal
operatorlimit
signal
Guide
Plate
SPIDER
Slide
plate
Stage
SPIDER
Slide
plate
Stage
preload mechanism
20mm
piezoelectric actuator
preload mechanism
20mm
piezoelectric actuator
6 ステージシステムの写真を図 2.2 に、アクチュエータ拡大図を図 2.3 に示す。位置を測 定するために、リニアエンコーダがステージ稼動部の下面に取り付けてある。リニアエン コーダはミツトヨ製で、計測分解能は電気分割ユニットのスイッチ切り替えにより、最小 10nm となっている。制御入力となる圧電素子への最大印加電圧は±130V である。駆動周 波数は 1kHz~60kHz まで設定変更が可能であり、ステージストロークは 4 インチウェハ対 応の約 100mm となっている。ステージの仕様を表 2.1 に示し、また圧電素子の性能表を表 2.2 に示す。また、圧電素子の静的な発生力は最大伸縮素子発生力 660N(4脚同時)とな る。予圧力が 50N、摺動面の摩擦力が 15N であることから足の運動に十分な駆動力が得ら れている。また、ガイドプレートの平均表面粗さが約 0.2μm であることから、伸縮方向 に 39V のオフセット電圧を印加することで表面粗さの影響を軽減している。 表 2.1.1 ステージの仕様 表 2.1.2 アクチュエータ(SPIDER)の仕様 可動部質量 1kg 駆動周波数設定 1~60kHz 最大推力 13N 最大印加電圧 ±130V ストローク 100mm 位置分解能 100nm 材質 PB(Zr,Ti)O3 密度 7.8×103kg/m3 伸縮率 660×10-12m/V 剪断率 1010×10-12m/V 積層枚数 4(伸縮)×4(剪断)
7
2.2 SPIDER の動作原理
SPIDER の動作原理について説明する。ステージ駆動用アクチュエータである SPIDER は、圧電素子(素子が変形することによって電圧を発生する素材)の積層化により構成さ れている。また、圧電素子の逆に電圧を印加することで素子が伸縮する性質を逆圧電効果 という。よって、圧電素子に分極と同じ方向の電圧を印加すると、縦に伸び縮む。 本アクチュエータはこの性質を利用し、図 2.4 のように剪断・伸縮を組み合わせ、連続 的に動作させることにより円運動を行うことが可能とした。 図 2.2.1 圧電素子の拡大図8 図 2.2.2 アクチュエータの円運動 図 2.2.3 SPIDER の脚の動作順序 図 2.2.4 ステージの送り順序 アクチュエータは v=rωで円運動しており、その様子を図 2.5 に示す。 また、圧電素子 を利用した SPIDER の 1 脚分および、その円運動の動作ループを図 2.6 に示す。アクチュエ ータの脚は、剪断方向 4 層と伸縮方向 4 層の計 8 層により構成されている。伸縮方向に電 圧を印加すると、アクチュエータは上下に伸縮し、剪断方向に電圧を印加すると左右方向に 剪断する。その脚を二本対とし、交互に円運動させ図 2.7 のような動作ループを繰り返すこ とで、それに接するステージの連続移動を行っている。
r
v
ω
SPIDER
Slide plate
r
v
ω
SPIDER
Slide plate
Stack A Stack B S e que nc e Stage surfaceStage feed direction Sequence:
Applied voltage for shear motion Applied voltage for expand motion
0 1 2 3 4 5 6 7 0 4 Sequence 0 1 2 3 5 6 7
Stage feed direction
Stack A Stack B S e que nc e Stage surface
Stage feed direction
Stack A Stack B S e que nc e Stage surface
Stage feed direction Stage feed direction Sequence:
Applied voltage for shear motion Applied voltage for expand motion
0 1 2 3 4 5 6 7 0 4 Sequence 0 1 2 3 5 6 7
Stage feed direction Sequence:
Applied voltage for shear motion Applied voltage for expand motion
0 1 2 3 4 5 6 7 0 Sequence:
Applied voltage for shear motion Applied voltage for expand motion
0 1 2 3 4 5 6 7 0 4 Sequence 0 1 2 3 5 6 7
Stage feed direction 4 Sequence 0 1 2 3 5 6 7
9
2.3
アクティブ除振台
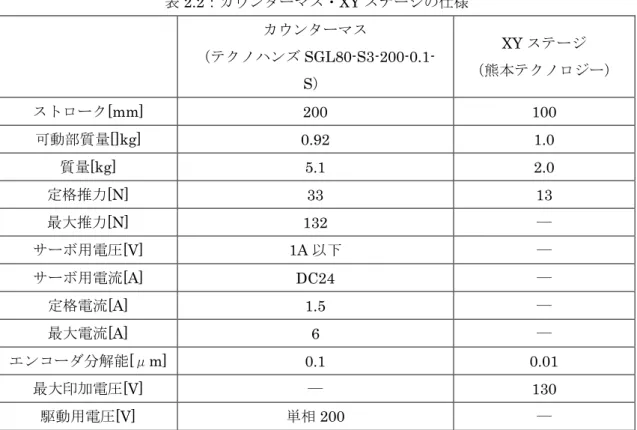
以下に統合化システムのための実験装置を示す。除振台中心位置検出用のセンサが4 つ、2つのカウンターマスを偏心してそれぞれx軸、y軸に沿って設置した。中心に精密 ステージを設置している。Z 方向制御用に各端にボイス・コイル・モータ(VCM)を設置 し、Z 方向の検出用に各 VCM の上に加速度センサを設置した。また VCM 接地部分を防 振ゲルによって接地した(VCM 部分の詳細写真は付録 A-3 参照)。 また、各実験装置に用いたカウンターマス、位置センサ、加速度センサ、VCM、精密ス テージの仕様を表2.1、表 2.2、表 2.3、表 2.4 に示す。ステージ全体質量は約 50kg であ る。 ステージ駆動時に発生する駆動反力による除振台の振動は最大1mm 程度である。位置 センサーの分解能は13μm で、AD 変換分解能も考慮すると実効分解能は 10μm とな り、十分である。またXY ステージの定格推力は 13N であるため、カウンターマスの定格 推力33N は反力制御に対して十分な性能を有していることがわかる。 図2.3:統合化システムのための実験装置 Linear motor-driven precision X-Y stageVCM&ACC sensor VCM&ACC sensor VCM&ACC sensor VCM Linear actuator-driven counter weight Position sensor Position sensor Linear actuator-driven counter weight Linear motor-driven precision X-Y stage
VCM&ACC sensor VCM&ACC sensor VCM&ACC sensor VCM Linear actuator-driven counter weight Position sensor Position sensor Linear actuator-driven counter weight
10
表2.1:位置センサの仕様
SUNX ANR1282 SUNX ANR1250
測定中心距離[mm] 80 50 測定範囲[mm] ±20 ±10 分解能[μm] 13(100Hz) 3.5(100Hz) 出力電圧[V] ±5 ±5 設置箇所 Y1、Y2、X4 X2 表2.2:カウンターマス・XY ステージの仕様 カウンターマス (テクノハンズ SGL80-S3-200-0.1-S) XY ステージ (熊本テクノロジー) ストローク[mm] 200 100 可動部質量[]kg] 0.92 1.0 質量[kg] 5.1 2.0 定格推力[N] 33 13 最大推力[N] 132 ― サーボ用電圧[V] 1A 以下 ― サーボ用電流[A] DC24 ― 定格電流[A] 1.5 ― 最大電流[A] 6 ― エンコーダ分解能[μm] 0.1 0.01 最大印加電圧[V] ― 130 駆動用電圧[V] 単相200 ― 表2.3:VCM(ボイス・コイル・モータ)の仕様 SWCC SHOWA/VCM 26-02R 定格電流[A] ±2 最大電流[A] ±3 表2.4:加速度センサの仕様 TATEYAMA KAGAKU/TUM0WLS050A 測定範囲[G] ±2 分解能[V/G] 1/1
11
第 3 章 システム同定法
3.1 システム同定
システム同定は、実システムに対する実験によって取得された入力データに基づいて、与 えられたモデルの集合から、実システムを最も近似するモデルを求める方法である。 システム同定の手順を以下に示す。 Step1: 制御対象の入出力信号を取得 Step2: Step1 で得た入出力信号を用いて、同定法で離散モデルを同定 Step3: 離散系モデルを連続系モデルに変換し、制御対象のゲインと極を導出 次節から、Step2 について説明していく。まず、入出力信号とモデルの関係を式で表した同 定モデル(ARXモデル)について記し、次にシステム同定法について説明する。3.2 ARXモデル
今回システム同定を行う際、ARX(Auto-Regressive –eXogeneous)モデル(同定モデル) を使用した。以下は、ARXモデルの説明である。 差分方程式、 (3.2.1) を考えたとき、モデルを記述するパラメータから構成されるベクトルを、 (3.2.2) 入出力データのベクトルを、 (3.2.3) と定義したとき、出力が、 (3.2.4) と表せるモデルである。ちなみに、未知であるのはθのみであり、その他は既知である。シ ステム同定は、同定法を用いてモデルのベクトルθを求めることを目的としている。)
(
)
(
)
1
(
)
(
)
1
(
)
(
k
a
1y
k
a
k
n
b
1u
k
b
u
k
n
k
y
・・・
na
a
・・・
nb
b
]
,
[
a
・・・
1a
nab
・・・
1b
nb
)]
(
)
1
(
),
(
-)
1
(
[
)
(
k
y
k
・・・
y
k
n
au
k
・・・
u
k
n
a
)
(
)
1
(
)
(
)
(
k
k
k
k
y
T
12
3.3 システム同定法
本研究にて、適用したシステム同定法は以下の2つである。 ・精密ステージへの適用
可 変 忘 却 要 素 を 用 い た 逐 次 最 小 二 乗 法 (VFF-RLS [Variable Forgetting Factor –
Recursive Least Squares method] ) ・アクティブ除振台全体への適用
部分空間法を用いた多入力多出力同定法(MIMO[Multi Input Multi Output]) しかし、VFF-RLS 法と MIMO 同定から説明すると分かりにくいため、 ・最小二乗法(LS 法) ・逐次最小二乗法(RLS 法) ・可変忘却要素を用いた逐次最小二乗法(VFF-RLS 法) ・部分空間法を用いた多入力多出力同定法(MIMO 同定法) と、上の順に説明していく。 同定の手順としては、MIMO 同定を行い全体の制御対象のパラメータを推定し、そのパラ メータを用いてVFF-RLS 法を精密ステージに適用し、パラメータの更新を行なっていく。 また、MIMO 同定の精度を確かめるために、LS 法で得られたARX モデルとの比較を行う。
3.3.1 最小二乗法
LS[Least-Squares method]法は、評価規範 (3.3.1.1) を最小化するθを求めることに対応しており、同定手順は以下のようになっている。 Step1: 推定誤差の計算 (3.3.1.2) Step2: θのパラメータの推定値
を 求める。 (3.3.1.3) なぜこうなるのかについて、詳しく説明する。 出力の一段階予測値y
(
k
)
がθに関して線形である線形回帰モデル (3.3.1.4)
N k Nk
N
J
1 2)
(
1
)
(
)
1
(
)
(
)
(
)
(
k
y
k
Tk
k
N k N k Tk
y
k
k
k
k
1 1 1)
(
)
(
)
(
)
(
)
(
ˆ
)
(
)
(
k
k
y
T
13 について考える。このときの予測誤差は、 (3.3.1.5) となり、このモデルに最小二乗法を適用する。すなわち、パラメータ推定のための評価規範 は次式のようになる。 (3.3.1.6) さらに、計算すると、 (3.3.1.7) また、 とおくと、
J
N(
)
は以下のようになる。 (3.3.1.8) (1) 未知パラメータが1つの場合 このとき、J
N(
)
の変数はすべてスカラになり、θをx
とおくと、 (3.3.1.9) となり、x
に関する二次方程式となる。ここで、R
(N
)
>0 であれば、J
N(
)
は下に凸にな るので、J
N(
)
の最小値は、以下のように求めることが可能である。 (3.3.1.10) よって、 (3.3.1.11))
(
)
(
)
(
k
y
k
T
k
N k T N k Ny
k
k
N
k
N
J
1 2 1 2)
(
)
(
1
)
(
1
)
(
N k T T T Ny
k
y
k
k
N
J
1 2)
(
)
(
2
)
(
1
)
(
N k N k N kk
k
N
N
R
k
y
k
N
N
f
k
y
N
N
C
1 1 1 2)
(
)
(
1
)
(
)
(
)
(
1
)
(
)
(
1
)
(
(
)
2
)
(
N
f
N
R
N
C
J
N
T
T
2)
(
2
)
(
N
f
N
x
R
N
x
C
J
N
0
)
(
2
)
(
2
f
N
R
N
J
dx
d
N)
(
)
(
N
R
N
f
x
14 のとき、
J
N(
)
は最小値をとる。 (2) 未知パラメータが2つ以上の場合 (1)と同様であるが、下に凸になるための条件が、R
(N
)
>0 から、行列R
(N
)
が正定値 行列(固有値が全て正である行列)であるとういう条件に変わる。 これは、正定値行列であれば、逆行列が存在するので、逆行列を用いてパラメータの推定 値を求めることが出来るからである。)
(
NJ
をθで微分したものを0とすると、下のようになり、 (3.3.1.12))
(
NJ
を最小とするパラメータの推定値は、 (3.3.1.13) となる。 この方法で得られたモデルをARX モデルと呼ぶ。LS 法は、一括処理最小二乗法、あるい は、オフライン最小二乗法と呼ばれる。オフラインの意味は、同定と実験を別々に行うと いうことである。 それに対して、次に説明するRLS 法と VFF-RLS 法は、同定と実験を同時に行うことがで きるので、オンライン最小二乗法と呼ばれる。
(
)
0
2
J
f
N
R
N
d
d
N)
(
)
(
)
(
N
R
N
1f
N
15
3.3.2 逐次最小二乗法
RLS 法[Recursive Least-Squares method]は、LS 法と同様に評価規範
(3.3.2.1) を最小化するθを求めることに対応しているが、同定手順は違い以下のようになっている。 Step1: 予測誤差の計算
)
1
(
ˆ
)
(
)
(
)
(
k
y
k
Tk
k
(3.3.2.2) Step2: 適応ゲインの計算)
(
)
1
(
)
(
1
)
(
)
1
(
)
(
k
k
P
k
k
k
P
k
K
T
(3.3.2.3) Step3: パラメータ推定値の更新)
(
)
(
)
1
(
ˆ
)
(
ˆ
k
k
K
k
k
(3.3.2.4) Step4: 共分散行列の更新
1
(
)
(
)
(
1
)
)
(
k
k
K
k
P
k
P
T (3.3.2.5) Step5: Step1 に戻る 上の手順で、パラメータを逐次的に更新することが可能になる。 また、共分散行列P(k)は過去のデータをどの程度影響させるか決める行列である。 パラメータの推定値と共分散行列の初期値は以下のように設定する。
)
0
(
)
0
(
0P
(3.3.2.6) ここで、γは正定数である。 1P
の初期値が0 としたいので、P(0)は∞が理想である. よって、できるだけ大きく( 310
~ 410
)に設定する。
N k Nk
N
J
1 2)
(
1
)
(
16 LS 法で求めたパラメータの推定値 (3.3.2.7) から、RLS 法を導出する。 (3.3.2.8) から、行列P(N)を (3.3.2.9) とおき、これを共分散行列と呼ぶ。すると、
)
(
)
(
)
1
(
)
(
)
(
)
(
)
(
1 1 1k
k
N
P
k
k
k
k
T T N k T
(3.3.2.10) が得られ、同様にして、 (3.3.2.11) とし、(4.3.2.9)~(4.3.2.11)を(4.3.2.8)に代入して変形すると、 (3.3.2.12) となる。(4.3.2.8)式で逆行列を用いているが、逆行列をオンラインで計算することは困 難である。そこで、逆行列補題を用いて逆行列をなくし、オンラインでも計算可能な形に)
(
)
(
)
(
N
R
N
1f
N
N k N k Tk
y
k
k
k
N
f
N
R
k
1 1 1 1)
(
)
(
)
(
)
(
)
(
)
(
)
(
ˆ
1 1)
)
(
)
(
(
)
(
N k Tk
k
N
P
N k Tk
k
N
P
1 1)
(
)
(
)
(
)
(
)
(
)
(
)
(
1
)
(
)
(
1
1 1 1k
y
k
k
y
k
N
k
y
k
N
N k N k
)
1
(
)
(
)
(
)
(
)
(
)
1
(
)
(
)
(
)
1
(
)
(
)
(
)
(
)
(
)
(
)
(
)
1
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
ˆ
1 1 1 1 1 1 1N
N
N
y
k
N
P
N
N
y
N
N
N
N
N
P
N
P
N
y
N
N
P
N
P
k
y
k
k
y
k
N
P
k
y
k
k
k
k
T T N k N k N k T
17 する。 逆行列補題の公式を以下に示す。 (3.3.2.13) これを、(3.3.2.10)式に適応させると、 (3.3.2.14) さらに、(3.3.2.12)式に含まれる
P
(
N
)
(
N
)
は、(3.3.2.14)式を用いると、 (3.3.2.15) となり、これを適応ゲインK(N)とした。 また、(3.3.2.15)を(3.3.2.12)に代入すると、
ˆ
(
N
)
ˆ
(
N
1
)
K
(
N
)
(
N
)
(3.3.2.16) となる。ただし、
(
N
)
y
(
N
)
T(
N
)
ˆ
(
N
1
)
(3.3.2.17) である。 1 1 1 1 1 1)
(
)
(
A
BC
A
A
B
I
CA
B
CA
)
(
)
1
(
)
(
1
)
1
(
)
(
)
(
)
1
(
)
1
(
)
(
)
(
)
1
(
)
(
1N
N
N
N
N
N
N
N
N
N
N
P
N
P
T T T
P
P
P
P
)
(
)
1
(
)
(
1
)
(
)
1
(
)
(
)
(
)
1
(
)
(
1
)
1
(
)
(
)
(
)
1
(
)
1
(
)
(
)
(
N
N
N
N
N
N
N
N
N
N
N
N
N
N
P
N
N
P
T T T
P
P
P
P
P
18
3.3.3 可変忘却要素を用いた逐次最小二乗法
VFF-RLS 法[Variable Forgetting Factor Recursive Least-Squares method]は、評価規範
k i i ki
i
J
1 2)
(
)
(
)
(
(3.3.3.1) を最小化することに対応しており、同定手順は以下のようになっている。 Step1: 予測誤差の計算)
1
(
ˆ
)
(
)
(
)
(
k
y
k
Tk
k
(3.3.3.2) Step2: 適応ゲインの計算)
(
)
1
(
)
(
)
1
(
)
(
)
1
(
)
(
k
k
P
k
k
k
k
P
k
K
T
(3.3.3.3) Step3: パラメータ推定値の更新)
(
)
(
)
1
(
ˆ
)
(
ˆ
k
k
K
k
k
(3.3.3.4) Step4: 忘却要素の計算)
(
)
(
)
(
1
1
)
(
2 0k
k
K
k
k
T
(3.3.3.5) ここで(k)<minのとき(k)=min Step5: 共分散行列の更新
1
(
)
(
)
(
1
)
)
(
1
)
(
k
K
k
P
k
k
k
P
T
(3.3.3.6) Step5: Step1 に戻る minは忘却要素の下限値である。0は追従速度を決定するパラメータで、小さくすると追従 性が向上し、逆に大きくすると適応速度が減少する。 上の手順からも分かるように、VFF-RLS 法は、RLS 法に可変忘却要素を加えたものであ る。19 図3.3.3.1 可変忘却要素 可変忘却要素λ(k)とは、上図に示したように、λ(k)を1に近づけることで、過去のデ ータを積極的に利用し、λ(k)を1より小さくすることで、過去のデータを忘却する要素と なっている。 本研究では、定常状態でλ(k)を1に近づけ、過渡状態で、λ(k)を1より小さくするよ うに設定した。これにより、経年劣化による制御器のパラメータの再チューニングを行う 必要がなくなり、保守・コストの面でも有益である。
k
time(i)
0.3
1.0
i
k
k
time(i)
0.3
1.0
i
k
20
3.3.4
部分空間法に基づく多入力多出力同定法
部分空間法に基づく多入力多出力(MIMO)同定法を本研究の実験装置における同定に 導入し、前節で説明したARX モデルとの比較をし、有効な手法であるか検討する。部分 空間法は1回の同定実験による多入力多出力の入出力データから得られた行列を必要とす る。すなわちMIMO システムモデルはこれらのデータ行列を用いて状態空間で得ること ができる。以下MIMO 同定法について説明する。 確率的外乱を含むm入力p出力の線形・離散時間・MIMO システムは、次式のように 状態空間表現できる。)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
1
(
k
k
k
k
k
k
k
k
v
Du
Cx
y
w
Bu
Ax
x
・・・・・・・・・・・・・・・ (3.3.1) ただし、u
(
k
)
R
mは入力信号、y
(
k
)
pは出力信号、 nk
)
(
x
は状態変数である。 また、w
(
k
)
nはシステム雑音、 pk
)
(
v
は観測雑音であり、ともに白色雑音である と仮定する。nはシステム次数であるが、これは未知であると仮定する。また、対象シス テムの構造も未知であると仮定する。 任意の正則行列Tを用いて、状態をx
~
(
k
)
T
1x
(
t
)
・・・・・・・・・・・・・・・・・・・・・・・(3.3.2) のように変換すると、(4.3.1)式の状態空間モデルは、)
(
)
(
)
(
~
)
(
)
(
~
)
(
)
(
~
)
1
(
~
k
k
k
k
k
k
k
k
T T T Tv
u
D
x
C
y
w
u
B
x
A
x
・・・・・・・・・・・・・・・ (3.3.3) となる。ただし、A
T
T
1AT
,
B
T
T
1B
,
C
T
CT
,
D
T
D
・・・・・・・・・・・ (3.3.4) また、w
~
(
k
)
T
1w
(
k
)
最小二乗法を用いた状態空間モデルの同定は、インパルス応答のような特殊な応答データ ではなく、通常の入出力データから状態空間モデルの同定を行うことができるシステム同 定法である。21 次に部分空間法のアルゴリズムについて説明する。 step1:入出力データから次式を構成する。 T UT
N
Π
Φ
Y
G
1
・・・・・・・・・・・・・・・・・・・・・・・(3.3. 5) ただし、Yは、 1 1)
1
(
)
1
(
)
(
)
(
,
)
1
(
)
1
(
)
(
)
(
mr r pr rr
k
k
k
k
r
k
k
k
k
u
u
u
U
y
y
y
Y
・・・・・・ (3.3.6)Y
Y
r(
1
)
Y
r(
2
)
Y
r(
N
)
pr Nr
N
r
r
N
N
)
1
(
)
1
(
)
(
)
1
(
)
3
(
)
2
(
)
(
)
2
(
)
1
(
y
y
y
y
y
y
y
y
y
・・・・・・・・・ (3.3.7) であり、Π
UTは、(3.3.6)式、U
U
r(
1
)
U
r(
2
)
U
r(
N
)
mr Nr
N
r
r
N
N
)
1
(
)
1
(
)
(
)
1
(
)
3
(
)
2
(
)
(
)
2
(
)
1
(
u
u
u
u
u
u
u
u
u
・・・・・・・・(3.2.8)I
U
UU
1U
)
(
T T UT
Π
・・・・・・・・・・・・・・・・・・(3.3.9) であり、Φ
Tは、Φ
s(
1
)
s(
2
)
s(
N
)
・・・・・・・・・・・・・・・・・ (3.3.10)22
)
(
)
1
(
)
(
)
1
(
)
(
2 1s
k
k
s
k
k
k
su
u
y
y
・・・・・・・・・・・・・・・・・・・・・・ (3.3.11) で与えられる。 Step2:重み行列
prpr 1W
(正則行列)とW
2
(ps1ms2)を選び、次式のように特異値 分解する。 T s s s TU
V
V
U
GW
W
G
ˆ
1 2
・・・・・・・・・・・・・ (3.3.12) ここで、最後の近似式は、特異値のうちで大きさの大きいものをn個用い、その他は 0 とおいて打ち切ることにより得られる。ただし、
T n s n n s n pr sV
U
,
,
である。ここで、W
2の後ろから(α×l)正規 直交行列を乗じることによってU
sは変化しないことに注意する。 Step3:フルランク行列Rを選び、(pr×n)行列Γ
rW
1U
sR
1ˆ
を定義する。そして、C
ˆ
Γ
ˆ
r(
1
:
p
,
1
:
n
)
・・・・・・・・・・・・・・・・・・・・・・ (3.3.13)Γ
ˆ
r(
p
1
:
pr
,
1
:
n
)
Γ
ˆ
r(
1
:
p
(
r
1
),
1
:
n
)
A
ˆ
・・・・・・・・・・・ (3.3.14) をA
ˆ
とC
ˆ
について解く。 Step4:つぎの線形回帰問題を解くことにより、B
ˆ
とD
ˆ
を推定する。 2 1 0 1 1 0)
(
)
ˆ
(
ˆ
)
(
)
(
)
ˆ
(
ˆ
)
(
1
,
,
m i n
a r g
N kk
q
k
u
k
u
q
k
N
y
C
I
A
B
D
C
I
A
x
δ
x
D
B
23 ・・・・・・・・・・(3.3.15) ただし、
x
0は状態量の初期値である。 Step5:雑音モデルを計算したい場合には、X
ˆ
:
x
ˆ
(
1
)
x
ˆ
(
N
)
R
1U
U
Σ
V
R
1U
TY
ˆ
s T s s s T s
:
L
Y
ˆ
・・・・・・・・・・・・・・・・・・・・・・・・・ (3.3.16) の式からX
ˆ
を構成し、w
(
k
)
x
ˆ
(
k
1
)
A
ˆ
x
ˆ
(
k
)
B
ˆ
u
(
k
)
・・・・・・・・・・・・・・ (3.3.17)v
(
k
)
y
(
k
)
C
ˆ
x
ˆ
(
k
)
D
ˆ
u
(
k
)
・・・・・・・・・・・・・・・・ (3.3.18) から雑音寄与分を推定する。24
3.4 部分空間法を用いた統合化システムのシステム同定実験
図3.4.1 6 自由度の制御システムイメージ この節では、部分空間法に基づく多入力多出力(MIMO)同定法を用いて、統合化システ ムのためのシステム同定実験を行い、単入力単出力(SISO)の同定法で得た ARX モデル との結果と比較しMIMO 同定の検証を行った。 ここで同定する制御対象への入出力信号は上図に示したようになっており、詳細は以下 のとおりである。 ux and uy :X 軸 Y 軸の精密ステージの入力 x and y : X 軸 Y 軸の精密ステージの位置出力 ux’, uy’ and uz’ : X 軸 Y 軸カウンタマスと Z 軸ボイスコイルモータの入力 x’, y’ and z’ : X 軸 Y 軸 Z 軸の除振台の位置出力 uθx, uθy and uθz , θx, θy and θz : 各軸の回転モーメントまた、本研究では簡単化のため各軸の回転モーメントは考慮していない。 Z 方向については VCM(ボイス・コイル・モータ)による DVFC のみの制御のため、ARX モデルにおいて同定実験は行わなかった。 まず、はじめに入出力信号を図3.4.2、3.4.3 にそれぞれ示す。実験条件は入力信号を白色 擬似信号とし、実験時間を同定に十分だと考えられる7sとした。入力信号は7sのうちの 一部(3s~5s)のグラフを示した。ステージ系への入力信号としてはステージ位置制御 のための同定用PRBS と除振台制振制御のための同定用 PRBS を図 3.4.2(a)、(b)の ようにあわせて用いた。xステージへの入力をyステージへの入力より 20%低く設定し同 定を行った。この理由としては、xステージの上にyステージが載っているため、xステー ジへ同じ入力では多入力多出力同定において、yステージ入力から除振台系への同定がう まくいかないことからである。xステージ入力をyステージ入力より低くするこで、xステ ージからとyステージからの除振台系への干渉が同等になる。
(
x
ref, y
ref)
(
u
x, u
y)
(
u
x’, u
y’, u
z’)
(
u
x, u
y, u
z)
(
x, y
)
(
x’, y’, z’
)
(
x,
y,
z)
+
Plant
P
Plant
P
Controller
C
Controller
C
(
x
ref, y
ref)
(
u
x, u
y)
(
u
x’, u
y’, u
z’)
(
u
x, u
y, u
z)
(
x, y
)
(
x’, y’, z’
)
(
x,
y,
z)
+
Plant
P
Plant
P
Controller
C
Controller
C
25 (a) X 軸精密ステージへの入力信号 (b) Y 軸精密ステージへの入力信号 (c) X 軸カウンターマスへの入力信号 (d) Y 軸カウンターマスへの入力信号 (e) Z 軸 VCM への入力信号 図3.4.2:実験装置への入力信号 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -8 -6 -4 -2 0 2 4 6 8 Time [s] In pu t sig n al [V] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -8 -6 -4 -2 0 2 4 6 8 Time [s] In pu t sig n al [V] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -10 -8 -6 -4 -2 0 2 4 6 8 10 Time [s] In pu t sig n al[ V] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -10 -8 -6 -4 -2 0 2 4 6 8 10 Time [s] In pu t sig n al[ V] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -30 -20 -10 0 10 20 30 Time [s] In pu t sig n al [N ] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -30 -20 -10 0 10 20 30 Time [s] In pu t sig n al [N ] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -30 -20 -10 0 10 20 30 Time [s] In pu t sig n al[ N ] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 -30 -20 -10 0 10 20 30 Time [s] In pu t sig n al[ N ] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 Time [s] In pu t sig n al[ A] 3 3.2 3.4 3.6 3.8 4 4.2 4.4 4.6 4.8 5 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 Time [s] In pu t sig n al[ A]
26 (a) X 軸精密ステージの出力信号 (b) Y 軸精密ステージの出力信号 (c) X 軸除振台の位置出力信号 (d) Y 軸除振台の位置出力信号 (e) Z 軸除振台の速度出力信号 図3.4.3:実験装置からの出力信号 0 1 2 3 4 5 6 7 0 2 4 6 8 10 12 14 16 Time [s] P os itio n[ m m ] 0 1 2 3 4 5 6 7 0 2 4 6 8 10 12 14 16 Time [s] P os itio n[ m m ] 0 1 2 3 4 5 6 7 -2 0 2 4 6 8 10 12 14 16 Time [s] P o si tio n [mm ] 0 1 2 3 4 5 6 7 -2 0 2 4 6 8 10 12 14 16 Time [s] P o si tio n [mm ] 0 1 2 3 4 5 6 7 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Time [s] P o si tio n [m m ] 0 1 2 3 4 5 6 7 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Time [s] P o si tio n [m m ] 0 1 2 3 4 5 6 7 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Time [s] P o si tio n [mm ] 0 1 2 3 4 5 6 7 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Time [s] P o si tio n [mm ] 0 1 2 3 4 5 6 7 3.915 3.92 3.925 3.93 3.935 3.94 Time [s] Ve lo c it y[ mm / s] 0 1 2 3 4 5 6 7 3.915 3.92 3.925 3.93 3.935 3.94 Time [s] Ve lo c it y[ mm / s]
27 次に、多入力他出力同定では入力信号の相関が各々低いことが条件であるので、実験で得 られた入出力信号の相関関係を検証した。図3.4.4 で入力信号のコヒーレンスをグラフに示 し、図3.4.5 で入力と出力間のコヒーレンスをグラフに示す。図 3.4.5 の(a)、(b)はス テージ系の相関を確認するため2次のデシメーションを行った。(c)、(d)、(e)、 (f)、(g)は除振台系の相関を確認するため12次のデシメーションを行った。デシメ ーション次数は制御対象の制御帯域によって決定した。 図3.4.4:入力信号間の相関 (a)X ステージから各ステージ及び除振台系 (b)Y ステージからステージ及び除振台系 (c)X ステージから除振台系 (d)Y ステージから除振台系 0 200 400 600 800 1000 1200 1400 1600 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Ferquency [rad/sec] C o h e re n c e 0 200 400 600 800 1000 1200 1400 1600 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Ferquency [rad/sec] C o h e re n c e
u
xtou
yu
xtou
x’u
xtou
y’u
ytou
x’u
ytou
y’u
x’tou
y’u
ytou
z’u
ytou
z’u
x’tou
z’u
y’tou
z’u
xtou
yu
xtou
x’u
xtou
y’u
ytou
x’u
ytou
y’u
x’tou
y’u
ytou
z’u
ytou
z’u
x’tou
z’u
y’tou
z’ 0 200 400 600 800 1000 1200 1400 1600 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 200 400 600 800 1000 1200 1400 1600 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uxto x uxto y uxto x’ uxto y' uxto z’ uxto x uxto y uxto x’ uxto y' uxto z’ 0 200 400 600 800 1000 1200 1400 1600 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 200 400 600 800 1000 1200 1400 1600 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uyto y uyto x uyto x’ uyto y’ uyto z’ uyto y uyto x uyto x’ uyto y’ uyto z’ 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uxto x’ uxto y’ uxto z’ uxto x’ uxto y’ uxto z’ 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uyto y’ uyto x’ uyto z’ uyto y’ uyto x’ uyto z’28 (e)X カウンターマスから除振台系 (f)Y カウンターマスから除振台系 (g)Z VCM から除振台系 図3.4.5:入出力間のコヒーレンス 以上のコヒーレンスの検証の結果、図3.4.5(a)、(b)で、ステージ系入力から同方向のス テージ位置への相関が高いことがわかる。これにより、ステージ系への除振台系からの干渉 は低く無視できる。しかし、図4.5(c)、(d)、(e)、(f)(g)で各々の軸の入力 に対して各々の軸の除振台系に相関があるといえる。よって、ステージ系から除振台x軸と y軸、カウンターマス系から除振台x軸とy軸をそれぞれ非干渉補償を行う必要があるこ とが分かった。 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e ux’to x’ ux’to y’ ux’to z’ ux’to x’ ux’to y’ ux’to z’ 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uy’to y’ uy’to x’ uy’to z’ uy’to y’ uy’to x’ uy’to z’ 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e 0 50 100 150 200 250 300 0 0.2 0.4 0.6 0.8 1 Ferquency [rad/sec] C o h e re n c e uz’to z’ uz’to x’ uz’to y’ uz’to z’ uz’to x’ uz’to y’