目次
第1 章 序論 1 1.1 研究の背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1.2 研究の目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・2 第2 章 専門教育のための教材開発 3 2.1 はじめに ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 2.2 Hardware・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3 2.2.1 AC サーボモータ ・・・・・・・・・・・・・・・・・・・・・・・4 2.2.2 モータ駆動負荷 ・・・・・・・・・・・・・・・・・・・・・・・・5 2.3 Software ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・6 2.3.1 プレゼンテーション用教材 ・・・・・・・・・・・・・・・・・・・7 2.3.2 MATLAB/simulink・・・・・・・・・・・・・・・・・・・・・・・7 2.3.3 Control Desk・・・・・・・・・・・・・・・・・・・・・・・・・7 第3 章 開発教材を用いたシステム同定法 8 3.1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 3.2 システム同定のための教材開発・・・・・・・・・・・・・・・・・・・8 3.3 開発教材を用いたシステム同定法・・・・・・・・・・・・・・・・・・10 3.3.1 事前同定実験・・・・・・・・・・・・・・・・・・・・・・・・・10 3.3.2 システム同定実験・・・・・・・・・・・・・・・・・・・・・・・12 3.3.3 ARX モデルに基づくシステム同定法・・・・・・・・・・・・・・・13 3.3.4 同定結果と妥当性検証・・・・・・・・・・・・・・・・・・・・・16 第4 章 開発教材を用いた制御系設計法 18 4.1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・18 4.2 制御系設計法学習のための教材開発・・・・・・・・・・・・・・・・・18 4.3 外乱オブザーバ・・・・・・・・・・・・・・・・・・・・・・・・・・19 4.3.1 外乱オブザーバのための教材開発・・・・・・・・・・・・・・・・23 4.3.2 開発教材を用いた外乱オブザーバの設計・・・・・・・・・・・・・25 4.4 2 自由度制御系・・・・・・・・・・・・・・・・・・・・・・・・・・29 4.4.1 2 自由度制御系のための教材開発・・・・・・・・・・・・・・・・31 4.4.2 開発教材を用いた 2 自由度制御系設計・・・・・・・・・・・・・・35 4.5 内部モデル制御系・・・・・・・・・・・・・・・・・・・・・・・・・39 4.5.1 内部モデル制御系のための教材開発・・・・・・・・・・・・・・・414.5.2 開発教材を用いた内部モデル制御系設計・・・・・・・・・・・・・44 4.6 連続軌跡追従制御系・・・・・・・・・・・・・・・・・・・・・・・・46 4.6.1 連続軌跡追従制御系のための教材開発・・・・・・・・・・・・・・48 4.6.2 開発教材を用いた連続軌跡追従制御系設計 ・・・・・・・・・・・50 第5 章 開発教材を用いた実応用例 52 5.1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・52 5.2 制御入力飽和に対する補償法・・・・・・・・・・・・・・・・・・・・52 5.2.1 アンチワインドアップ補償のための教材開発・・・・・・・・・・・56 5.3 むだ時間補償 ・・・・・・・・・・・・・・・・・・・・・・・・・・・58 5.3.1 スミス補償のための教材開発 ・・・・・・・・・・・・・・・・・・60 第6 章 まとめ 62 6.1 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・62 参考文献・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 63 謝辞 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・64 付録 65 付録.A ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・65 付録.B ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・66 付録.C ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・71
1
第1章 序論
1.1 研究の背景
近年、急速に半導体製造技術の向上が推し進められている。その中で微細化の解法とし て光源の短波長化とともに精密ステージの高度な制御技術が大きく貢献している。この半 導体の微細化、高集積化とともに製造に用いられるアクチュエータにはより高速、高精度 であることが求められる。これに伴い高度な制御技術が必要不可欠となり、ディジタル制 御技術は工学のみならず多種多様な分野で用いられてきている。その結果、専門の異なる 分野からでも制御を中心とした研究・開発分野に配属される人が増加してきている。また、 時間的な制約から理論的背景を割愛して、現場技術の継承のみで対応する場合も少なくな く、制御系設計技術者の育成が大学、企業の使命となっているといえる。 制御技術の学習の形態としては、座学としてテキスト中心に理論を学習、コンピュータ シミュレーションを通じ動作の検証、最後に実機での結果検証と、互いに補完、連携して 学習を行うことが理想的といえる。しかしながら、上記のような時間的制約の理由から理 論とその応用を実際に体感できる機会は多くはなく、そのためにも『理論』と『実践』を 相互補完し修得するための制御工学教育システムが必要不可欠である。既存の学習システ ムではこれらの要求を満たすものは少なく、制御工学の学習形態は座学やテキストによる 理論のみのものがほとんどであり、それらは理論と実践の結びつきが希薄で実際の現場に てすぐに役に立てるものであるとはいい難い状況である。2
1.2 研究の目的
本研究では制御系開発部門の見習いエンジニアや、制御理論を学びたいエンジニア、制 御系の研究室に所属する学生を対象に、PID 制御に代表される古典制御から軌跡追従制御 などのアドバンスト制御法、そしてそれらを成功に導くためのシステム同定理論に基づく 実験的モデリング手法について、複数の実応用例を交えながら学習できるような教育教材 を構築することを目的としている。 本教材ではこの学習プログラムを修得後すぐに現場で実践できるよう、モデル化から制 御系設計、ディジタル制御実現、実験解析までの一連の流れについても具体的に解説する。 CAD による設計・シミュレーション・解析技術についてのプログラム例も提示していく。 理論、実践のどちらからでも容易に全体が理解でき、必要に応じて詳細まで学習できるシ ステムの構築を目指す。これにより実対象を意識したシステムでソフトウェアとハードウ ェアの両方の技術が修得可能なプログラムシステムを構成する。 開発ツールとしてはパワーポイント、MATLAB/simulink、DSP、汎用サーボモータを用 いた。専門外のエンジニアにもわかりやすく直感的に制御系の設計、シミュレーション、 実験が行えることを念頭にこれらソフトウェア、ハードウェアの製作を行っている。本研 究で用いたこれら各ツールの概略を付録A に記載する。 本論文は以下のような構成になっている。第 2 章で作成した教材の概要について説明し、 第3 章では教材の chapter3 で触れているシステム同定法について説明する。第 4 章は教材 のchapter4 に対応し、具体的な制御系の説明として外乱オブザーバ、2 自由度制御系、内 部モデル制御系、連速軌跡追従制御系について述べている。第5 章は教材の chapter5 に関 連している。実際の制御現場で必ず問題となる入力飽和やむだ時間、ノイズ、振動特性と それらに対する対策について述べている。第 6 章では本論文のまとめ、実施例を通じた考 察を述べる。3
第
2 章 専門教育のための教材開発
2.1 はじめに
2 章では学習教材として実験用に製作したハードウェアとそれに伴う各プログラムの構 成について説明する。2.2 Hardware
本節では学習教材として実験用に製作したハードウェアついて記述する。本試験機は実 習ベースの体験用機器として利用できる装置を目指した。対象としては汎用的でかつ産業 界で広く用いられ、各種制御理論が実装しやすいAC サーボモータを DSP により駆動する。 実際に開発したシステムの概略図をFig.2.1 に示す。 Fig.2.1 開発したシステムの概略図4
2.2.1 AC サーボモータ
制御対象を選定するにあたり、汎用的でかつ産業界で広く用いられ、各種制御理論が応 用しやすい等の理由から制御対象としてAC サーボモータを選んだ。取り付ける負荷状態を 変化させることにより産業界での各種対象全般を模擬可能となることも重要な点である。 また、選定の基準として位置モード、速度モードを切り離せる汎用モータであること、ア ンチワインドアップの実験効果を明確にするために容量の小さいことを考慮した。 利用したサーボモータは製品版として既に既定の(PID)位置制御モードや速度制御モー ドが実装されていたが、今回は理論学習を目的としているため、できる限り素の状態で用 いるためトルク制御モードを採用した。モータの概形をFig.2.3 に示す。本教材で用いたサ ーボモータ、サーボアンプの仕様を付録B に記載する。 Fig2.3 モータ概形5
2.2.2 モータ駆動負荷
実験装置に取り付ける負荷を製作するにあたり‘わかりやすさ’を念頭に置き設計を行 った。まず負荷の材質についてだが鉄、アルミの 2 パターンを考慮した。アルミの板では 状況によっては柔らかく共振特性が現れるため、剛性を考え、鉄の負荷も製作した。しか し実際にモータに取り付け駆動してみると鉄の負荷は重すぎるため摩擦の影響や慣性がか なり大きくなってしまい、デモンストレーションを行うには不適合であったため、アルミ 板を利用することに決定した。 次に負荷の形、大きさや厚さはアルミ板が共振せず剛性が保てること、大きすぎず扱い やすいことから厚さ 2[mm]、半径 80[mm]の円盤とし、回転が目視でき、かつ、軽量化を 図るためにFig 2.3 のように穴をあけた。負荷の製作時に使用した製図を付録 C に記載する。 また、外乱負荷を与えやすいように取手を取り付けている。 Fig 2.3 モータ駆動負荷概形6
2.3 Software
本節では実機を駆動するためのソフトウェアやシミュレーション、またそれらとリン クして解説をするためのプレゼンテーション教材について説明する。作成した教材とそれ に伴うプログラム一覧をTable2.1 に示す。Table2.1 の各ファイルについて説明する。各プ ログラムには一定のルールに則してファイル名を付けている。 fig-file:実行することによりプレゼンテーションで扱われているグラフをすべて表示させ ることができる。 m-file:MATLAB により作成されたプログラムファイルで、プラントやコントローラの パラメータ決定をする。mdl-file:simulink によって作成されたモデルファイルで、基本的に m-file 内の‘sim’ コマンドにて実行されシミュレーションを行う。
project-file:m-file をもとに作成した実験用モデルファイル。 Control desk:dSPACE の controldesk にて扱うファイル。
例えば、m_chap2_no10_fig はプレゼンテーションの chapter2 の 10 ページ目に示されて いるグラフを表示させ、m_chap2_*のファイルは m-file であり、内容は 2 章にて扱われて いるものである。
7
2.3.1 プレゼンテーション教材
パワーポイントを利用し、プレゼンテーション教材を作成した。パワーポイントは全 5 章による構成となっていて、各章の主な内容は以下のようになっている。 Chapter1:制御工学の基礎理論として学習するにあたり必須となるラプラス変換や ブロック線図、また周波数応答と時間応答など基礎的な理論についての 解説が行われている。 Chapter2:制御を理解するための実応用例として磁気型モータやピエゾモータ、ス イッチング電源の制御の実例を示している。 Chapter3:制御結果を左右するシステム同定法について step1~step6 に分けて順を 追って解説している。例として最もよく用いられるARX モデルに対して 最小二乗規範の予測誤差法によりパラメータ同定を行う方法について述 べられている。 Chapter4:周波数応答からの設計法、伝達関数からの設計法についてそれぞれ解説 している。また、具体的な制御系としてPID 制御に代表される古典制御 から軌跡追従制御などのアドバンスト制御法について述べられている。 Chapter5:応用時に問題となるポイントとその対策と題して実際の現場で問題とな り易い制御入力飽和やむだ時間、ノイズ、振動特性とそれらに対する対 策について述べている。また、制御系のディジタル化を行う際の注意点 についても触れている。2.3.2 MATLAB/simulink
前 節 で 説 明 し た プ レ ゼ ン テ ー シ ョ ン 教 材 に 則 す 形 で 制 御 系 設 計 用 CAD であ る MATLAB/simulink によりシミュレーションファイルの作成を行った。利用者のサンプル ファイルとなるため各パラメータの意味や単位などをコメントアウトにて補足記入した。 シミュレーション用モデルファイルと実験用のモデルファイルの関連を取るために table2.1 に示すように一貫したファイル名を付けた。2.3.3 Control desk
実験用モデルファイルに関連し、レイアウトファイルを作成した。利用しやすいように オンラインでの波形確認や各ゲイン調整ができるような構成となっている。また、操作す る際の注意事項をコメントにて記入した。8
第
3 章 開発教材を用いたシステム同定法
3.1 はじめに
制御系設計の理論が充実してきた近年、モデル化の精度は制御系の性能を大きく左右す る。モデル化にあたり制御対象の入出力信号のみを必要とする比較的簡便でかつ有効なモ デル化手法であるシステム同定法が注目されてきた。本教材ではchapter3 にてシステム同 定法を step1~step6 に分けて解説している。本章ではこれら作成したプレゼンテーション 教材やプログラム、それらに施した工夫点について述べる。3.2 システム同定のための教材開発
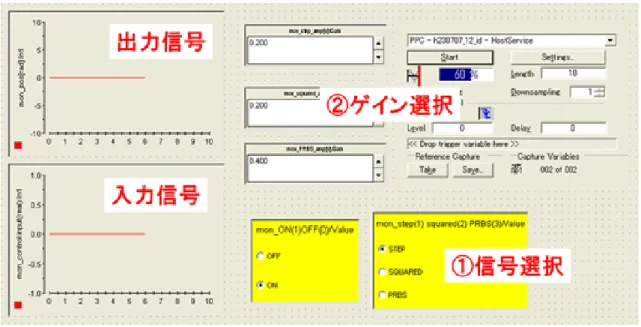
プレゼンテーション教材ではシステム同定法について以下のように step1~step6 に分け て解説している。システム同定法には王道と呼ばれるものはなく、その精度や方法にはエ ンジニアの主観とその技量が現れる。ここではその中でも最もスタンダードである、最小 二乗規範の予測誤差法によるパラメータ同定について解説している。 Step1 事前同定実験 Step2 同定実験の設計 Step3 システム同定実験 Step4 入出力信号の前処理 Step5 システム同定法 Step6 モデルの選定と妥当性評価 システム同定を行うサンプルプログラム:m_chap3_id では Step4~Step6 の一連の流れ を自動的に行うことができる。具体的には以下の流れである。 ・デシメーションやアウトライアの除去 ・ARX モデルに対し予測誤差法によるパラメータ同定 ・同一入力に対する出力比較 ・導出したモデルを平衡化実現法により低次元化 また、パワースペクトルやコヒーレンスの表示、低次元化前後のボード線図の比較など 利用者が理解しやすいように各パラメータの表示することができる。Fig.3.1 にシステム同定実験の Control desk を示す。ステップ信号、矩形波、M 系列信号
の3 種類の入力信号を選択でき(図中①参照)、それらの振幅も自由に決定し入力できる(②)。
9
10
3.3 開発教材を用いたシステム同定法
実際に対象をFig.2.1 で示したシステムに対して本教材で解説する流れに沿ってシステム 同定実験を行った。その手順と具体的な方法について述べる。3.3.1 事前同定実験
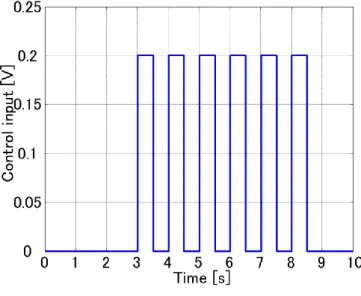
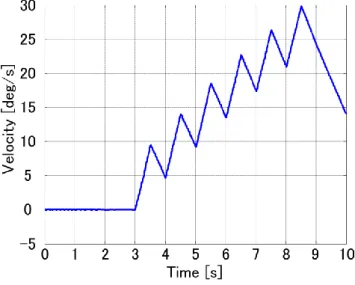
システム同定実験を行うに先立ち、事前同定実験として制御対象にステップ信号を入力 することで制御対象の大まかな特性を得る。その結果からむだ時間の測定や立ち上がり時 間の測定を行うことで、同定入力やサンプリング周期、実験時間を選定し、仮にむだ時間 が無視できない場合、その補償法の必要性を確認するためである。 今回はトルク制御モードで実験を行っているために安全面を考慮し、ステップ入力でな く矩形波を利用した。制御対象の仕様を確認し、入力する矩形波の振幅を0-0.2[v]、周期は 1[s]とした。振幅を±0.2[v]や±0.1[v]にしなかったのは静止摩擦の影響を受けにくくするた めである。Fig.3.2 に入力信号[V]、Fig.3.3 に速度出力[deg/s]、Fig.3.4 に位置出力[deg]を示す。この結果からむだ時間は0.001[s]未満であることが確認できた。また、各出力結果の波
形から電圧→速度の特性は積分系、電圧→位置の特性は一次遅れ系であると判断できる。
11
Fig. 3.3 速度出力
12
3.3.2 システム同定実験
事前同定実験の結果を考慮しシステム同定実験を設計し、実験を行った。入力信号の周 波数特性の選定は同定を行う帯域や、PE 性(persistently exciting)から決定した。具体的に は9 次の M 系列信号(疑似白色信号)である。振幅特性は制御対象の SN 比、不感帯や飽 和、計算誤差を考慮し0-0.4[V]とした。サンプリング周期の選定はステップ応答法や最小二 乗法による決定法が存在するが、ハードウェアが許容する限りできる限り短いサンプリン グ周期を用いればよい。なぜならば信号の取得後に信号処理(デシメーション)を利用すれば サンプリング周期は事後に拡大可能であるためである。今回は簡単のためにサンプリング 時間は0.001[s]とした。計測時間は M 系列信号の周期や対象の駆動範囲(ストローク)と同定 周波数の下限を考慮し決定すればよいが、本研究に扱う対象は回転系であるためにストロ ークは考慮する必要がないためにより多くのデータが取れるよう、十分長いと考えられる 6[s]とした。Fig. 3.5 に入力信号、 Fig. 3.6 に出力信号の一部を示す。得られたデータから モデルの構築を行う。13
Fig.3.5 入力信号
14
3.3.3 ARX モデルに基づくシステム同定法
同定モデルとしては、次式で示されるARX(Auto-Regressive –eXogeneous)モデルを 用いた。ARX モデルのブロック図を Fig.3.7 に示す。
q
y
k
B
q
u
k
k
A
(3.1)
a a n nq
a
q
a
q
A
1
1 1
(3.2)
b b n nq
b
q
b
q
B
1 1
(3.3)
k
は白色雑音である。 ここでは予測誤差法によって未知のパラメータA
q
、
B
q
の推定を行う。パラメータベク トル
、データベクトル
は次式で表される。
T n nab
b
ba
a
1,
,
,
1,
,
(3.4)
T b au
k
u
k
n
n
k
y
k
y
k
1
,
,
,
1
,
,
(3.5) ARX モデルの1段予測値は次式のようになる。
k
A
q
y
k
B
q
u
k
k
y
ˆ
|
1
T
(3.6) パラメータ推定の評価規範として、
N k Nl
k
k
N
J
1,
,
,
1
(3.7) と設定する。ここで、l
k
,
,
k
,
は予測誤差
k
,
y
k
y
ˆ
k
|
(3.8) の大きさを測る任意の正のスカラ値関数である。この評価規範J
N
を最小にするように 推定値を計算するパラメータ推定法を総称して予測誤差という。15
k
,
,
k
,
l
として、2 次関数
k
,
,
k
,
2
k
,
l
(3.9) と選んだ場合を最小2 乗法(least-squares method)という。
N k Nk
N
J
1 2,
1
(3.10) として、この評価規範J
N
を最小にするようなパラメータを推定する。 本研究へ適用するとu
はAC サーボモータへの入力[V]、yはモータの回転角度[deg]、と なる。 Fig.3.7 ARX モデル+
+
q
B
q
A
1
k
k
u
y
k
16
3.3.4 同定結果と妥当性検証
サンプルプログラム:m_chap3_id を利用してシステム同定を行った。30 次の ARX モ デルを連続化し、平衡化実現により制御設計において実現が容易な2 次モデルに低次元化 した。低次元化の指標としてはグラミアンを用いた。Fig.3.8 にその結果を示す。このグラ フから2 次のモデルに低次元化しても十分にモデルの近似ができることが確認できる。 これにより2 次に低次元化を行った数式モデルは、 P(s) = 118.41 𝑠(𝑠 + 0.174) (3.11) となる。 低次元化前後の比較ボード線図をFig.3.9 に示す。この結果から広帯域ではモデル化誤差 が存在するものの低域では30 次モデルを 2 次モデルにまで低次元化してもよく一致してい ることがわかる。また、30 次モデル 2 次モデルに同一入力を印加し出力を比較した。その 結果をFig.3.10 に示す。 Fig.3.8 グラミアン17
Fig.3.9 ボード線図比較
18
第
4 章 開発教材を用いた制御系設計法
4.1 はじめに
この章では制御系を設計するために必要な知識や技術について本教材のchapter4 の流れ に沿って解説する。そして学習教材としてのクオリティを高めるために施した工夫につい て述べる。また、具体例として各種制御系を負荷付きAC サーボモータ、式(3.11)のモデル に適応したシミュレーション及び実験結果を示す。4.2 制御系設計法学習のための教材開発
本教材のchapter4 では周波数応答からの設計法として制御器の設計について開ループ周 波数応答、閉ループ周波数応答を確認することで安定余裕や即応性、減衰性の観点から解 説している。伝達関数からの設計法では感度関数や、高域低域での周波数整形の観点から の設計法について触れている。制御法としては以下の制御法についてその特徴や設計法に ついて示している。 ・PID 制御 ・外乱オブザーバ ・目標値フィードフォワード型2 自由度制御 ・フィードバック型2 自由度制御 ・内部モデル制御 ・連続軌跡追従制御 以下に主な構成である、外乱オブザーバ、目標値フィードフォワード型2 自由度制御系、 内部モデル制御系、連続軌跡追従制御系を解説するために作成した教材とそれに基づいて 制御系設計を適用した例について述べる。19
4.3 外乱オブザーバ
実システムにおける制御対象は少なからず非線形性や時変性を有し、外乱も存在するた め数学モデルによる完全なモデル化は不可能である。本研究の教材として用いたモータ制 御を例とした場合には、流せる電流の制限からくる操作量の飽和や、モータ駆動時の摩擦 などは非線形性である。そこで制御系設計においては、パラメータの変動や外乱に対して 制御性能を保持できるロバスト性をもつ制御器が有効である。 このようなロバスト性をもつ制御系として、外乱オブザーバ (disturbance observer)を用 いた補償法がある。本節ではこの外乱オブザーバを教材の流れに沿って解説していく。外 乱オブザーバは、制御入力と出力情報を用いて制御対象にかかる外力を推定し、それをフ ィードバックすることで外乱補償を行うものである。外乱オブザーバを用いた制御系を Fig.4.3.1 に示す。𝑃(𝑠)は実際の制御対象であり、𝑃𝑛(𝑠)はそのモデルである。実システムに おいては𝑃𝑛(𝑠)は厳密にプロパーな伝達関数となるため、𝐹(𝑠)は𝑃𝑛−1(𝑠)𝐹(𝑠)をプロパーな伝 達関数とする低域通過フィルタである。𝑃𝑛(𝑠)の相対次数が𝑛のときには、もっとも簡単な 𝐹(𝑠)は帯域𝜔𝑑の𝑛次遅れとして次式のように与えられる。また、𝑛 は𝐹(𝑠)𝑃𝑛−1(𝑠)がプロパー になるように決定する。 𝐹(𝑠) = 1 (𝑠 𝜔⁄ 𝑑+ 1)𝑛 (4.3.1)u
は制御対象への入力信号で、d
およびdˆ
は外乱とその推定値、 r u は外乱オブザーバ補 償を行った制御対象への入力信号である。ここで𝜔𝑑は外乱の推定速度をあらわし、補償し たい外乱の周波数帯域に設定する。Fig.4.3.1 より以下の関係式が成り立つ。 = 𝑃( ) (4.3. ) = + 𝑃𝑛−1𝐹(𝑃𝑛 ) (4.3.3) 式(4.3.3)より = 1 1 𝐹( 𝑃𝑛−1𝐹 ) (4.3.4) これを式(4.3.2)に代入し、入出力特性として記述すると = 𝑃 1 𝐹 + 𝑃𝑃𝑛−1𝐹 (1 𝐹)𝑃 1 𝐹 + 𝑃𝑃𝑛−1𝐹 (4.3. ) となる。ここで外乱オブザーバ補償の持つ二つの効果を考える。20
21 外乱抑圧特性 モデル化誤差のない理想的な場合を考える。(すなわち𝑃𝑛 = 𝑃の場合) すると式(4.3.5)より出力yは、 = 𝑃 (1 𝐹)𝑃 (4.3. ) となる。ここで𝐹 = 1とできるならば、 = 𝑃 (4.3.7) となり、理想的には外乱の影響を全く受けない制御系となる。しかしながら実際にF(s)は モデル𝑃𝑛−1(𝑠)の相対次数という制約で実現されるため、𝐹 ≈ 1となる周波数帯域に限り外乱 の影響を抑圧できる。外乱特性の改善をFig.4.3.2 に示す。 Fig.4.3.2 外乱抑圧特性 (実行ファイル:m_chap4_no24_fig)
22 ノミナル化特性 次は外乱のない場合を考える。(すなわち = 0の場合) すると式(4.3.5)より出力は、 = 𝑃 1 𝐹 + 𝑃𝑃𝑛−1𝐹 (4.3.8) となる。ここで、
F
1
とできれば、 = 𝑃𝑛 (4.3. ) これはすなわち入力信号 に対する制御対象は見かけ上のモデル特性はモデル𝑃𝑛(𝑠)のもの となる。したがって外乱抑圧特性と同様に、𝐹 ≈ 1となる周波数帯域に限り制御対象の特性 をノミナルモデル化することが可能である。ノミナル化特性をFig.4.3.3 に示す。 以上のように、制御対象のノミナルモデルとフィルタによる外乱オブザーバを実装するこ とにより、フィルタ帯域内で制御対象に加わる外乱を抑圧し、見かけ上の制御対象をノミ ナルモデルとみなせる。 Fig.4.3.3 ノミナル化特性 (実行ファイル:m_chap4_no24_fig)23
4.3.1 外乱オブザーバのための教材開発
外乱オブザーバについて解説を行うために作成したプレゼンテーションの一部を
Fig.4.3.4 に示す。関連プログラム:m_chap4_do を Fig.4.3.5 に示す。このプログラムでは 外乱抑圧特性、ノミナル化特性についてそれぞれの効果示すために外乱とプラントパラメ ータを変更しやすいように作成した。Fig.4.3.6 にモデルファイル:mdl_chap4_do のブロ ック線図を示す。𝐶(𝑠)は汎用的な制御器として PID 制御器を用いて外乱オブザーバの有無 を比較している。 Fig.4.3.4 外乱オブザーバプレゼンテーション教材 Fig.4.3.5 m_chap4_do
24 このシミュレーションに対応した実験用モデルファイル:mdl_chap_do_proj を Fig.4.3.7 に示す。各所にゲインが乗算できるような構成になっている。また安全面を考慮し、外乱 オブザーバの出力側にゲインを直列に挿入し、Control desk にてオブザーバ出力を調整で きる構成となっている。 Fig.4.3.6 mdl_chap4_do 内のブロック線図 Fig.4.3.7 mdl_chap_do_proj 内のブロック線図
25
4.3.2 開発教材を用いた外乱オブザーバの設計法
2 入力 1 出力型外乱オブザーバの実現 本教材にて外乱オブザーバを利用するにあたり、コーデックの簡単化のためFig.4.3.8(a) からFig.4.3.8(b)のように外乱オブザーバを 2 入力 1 出力のシステムに簡略化している。以 下にその手順を示す。入力1: 1、入力2: 2、出力: とし、𝑃𝑛(𝑠)の状態空間表現を式(4.3.10)、 𝑃𝑛−1(𝑠)𝐹(𝑠)の状態空間表現を式(4.3.11)とする。 𝑃𝑛(𝑠) = [ 𝑎𝑝𝑛 𝑏𝑝𝑛 𝑐𝑝𝑛 𝑝𝑛] (4.3.10) 𝑃𝑛−1(𝑠)𝐹(𝑠) = [𝑎𝑐𝑖𝑛𝑣 𝑏𝑖𝑛𝑣 𝑖𝑛𝑣 𝑖𝑛𝑣] (4.3.11) 𝑃𝑛(𝑠)の状態変数を𝑥𝑝𝑛、出力をzとすると、𝑃𝑛(𝑠)の入出力から、 𝑥̇𝑝𝑛= 𝑎𝑝𝑛𝑥𝑝𝑛+ 𝑏𝑝𝑛 1 (4.3.1 ) z = 𝑐𝑝𝑛𝑥𝑝𝑛+ 𝑝𝑛 1 (4.3.13) 同様に、𝑃𝑛−1(𝑠)𝐹(𝑠)の状態変数を𝑥𝑖𝑛𝑣とすると入出力から、 𝑥̇𝑖𝑛𝑣 = 𝑎𝑖𝑛𝑣𝑥𝑖𝑛𝑣+ 𝑏𝑖𝑛𝑣( 2 z) (4.3.14) = 𝑐𝑖𝑛𝑣𝑥𝑖𝑛𝑣+ 𝑖𝑛𝑣( 2 z) (4.3.1 ) これらの式から、 [𝑥̇𝑥̇𝑖𝑛𝑣 𝑝𝑛] = [ 𝑎𝑖𝑛𝑣 𝑏𝑖𝑛𝑣𝑐𝑝𝑛 𝑧𝑒𝑟𝑜𝑠( , ) 𝑎𝑝𝑛 ] [ 𝑥𝑖𝑛𝑣 𝑥𝑝𝑛] + [ 𝑏𝑖𝑛𝑣 𝑝𝑛 𝑏𝑖𝑛𝑣 𝑏𝑝𝑛 𝑧𝑒𝑟𝑜𝑠( ,1)] [ 1 2] (4.3.1 ) = [𝑐𝑖𝑛𝑣 𝑖𝑛𝑣𝑐𝑝𝑛] [𝑥𝑥𝑖𝑛𝑣𝑝𝑛] + [ 𝑖𝑛𝑣 𝑝𝑛 𝑖𝑛𝑣] [ 1 2] (4.3.17) と、導出することができる。ただし𝑧𝑒𝑟𝑜𝑠( , )は 2 行 2 列の零行列を示し、同様にzeros( ,1)は 2 行 1 列の零行列を示す。以上ように状態空間表現することで 2 入力 1 出力型の外乱オブザ ーバの実現を行った。各実験用モデルファイルにはこのようにして作成した外乱オブザー バによる補償が行われている。26
(a) (b) Fig.4.3.8 2 入力 1 出力型外乱オブザーバの実現
27 本研究で用いたモータに対して外乱オブザーバによる補償法を適用した。制御器はPID 制御器を用い、今回用いた外乱オブザーバのフィルタの伝達関数はAC サーボモータのモデ ルの周波数特性や次数を考慮し設計した。フィルタ帯域𝜔𝑑= 100[rad/sec]とし、その伝達 関数は以下とした。 2
)
1
/
(
1
)
(
ds
s
F
(4.3.18) 外乱オブザーバを用いたステップ応答のシミュレーションFig.4.3.9 に示す。PID 制御器 のみの制御系と比較して外乱抑圧ができている。また同条件での実験結果を Fig.4.3.10 に 示す。PID 制御の結果では摩擦の影響が確認できるが、外乱オブザーバを取り付けたこと により、摩擦補償ができている。 Fig.4.3.9 外乱オブザーバシミュレーション結果 (実行ファイル:m_chap4_do_motor)28
29
4.4 2 自由度制御系
Fig.4.4.1 に示すような制御対象𝑃(𝑠)とフィードバック制御器𝐶(𝑠)からなる制御系では、 目標値 r から制御量 y までの目標値応答特性𝐺𝑦 (𝑠)と外乱dからy までの外乱応答特性𝐺𝑦𝑑(𝑠) は、それぞれ次式の伝達関数で表される。 (𝑠) 𝑟(𝑠)= 𝐶(𝑠)𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠)≡ 𝐺𝑦 (𝑠) (4.4.1) (𝑠) (𝑠)= 𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠)≡ 𝐺𝑦𝑑(𝑠) (4.4. ) ここで、簡単な計算より、 𝐺𝑦 (𝑠) + 𝐺𝑦𝑑(𝑠) 𝑃(𝑠) = 1 (4.4.3) となることがわかる。これは𝐺𝑦 (𝑠)の特性を𝐶(𝑠)により決定した場合、𝐺𝑦𝑑(𝑠)の特性もこの 関係から一意に決まってしまう。つまり、2 つの特性に対する要求性能を同一の𝐶(𝑠)で達成 しなくてはならない。このような単一のフィードバック制御器𝐶(𝑠)による制御系を 1 自由度制御系(one degree-of-freedom control system)とよぶ。
これに対して、Fig.4.4.2 のように目標値にフィードフォワード制御器𝐶𝑓(𝑠)を追加した制
御系を2 自由度制御系(two degree-of-freedom control system)とよぶ。𝐶𝑓(𝑠)の導入により、 目標値応答特性と外乱応答特性はそれぞれ次式となる。 (𝑠) 𝑟(𝑠)= {𝐶(𝑠) + 𝐶𝑓(𝑠)}𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠) (4.4.4) (𝑠) (𝑠)= 𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠) (4.4. ) ここで、𝐶𝑓(𝑠) = 𝑃−1(𝑠)とできれば、式(4.4.4)、 (4.4.5)はそれぞれ (𝑠) 𝑟(𝑠)= 1 (4.4. )
30 (𝑠) (𝑠)= 𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠) (4.4.7) となり、出力は目標値に完全追従可能であり、𝐶(𝑠)は外乱応答特性のみを考慮して設計すれ ばよい。しかしながら通常𝑃(𝑠)は分母の次数が分子より高く、厳密にプロパーな伝達関数と なるため、𝐶𝑓(𝑠) = 𝑃−1(𝑠)とはインプロパーとなり実現できない。そこで、𝑃−1(𝑠)𝐹(𝑠)がプ ロパーとなるようなフィルタ𝐹(𝑠)を用いて Fig.4.4.2 を Fig.4.4.3 のように修正する。する と、目標値応答特性と外乱応答特性はそれぞれ次式のようになる。 (𝑠) 𝑟(𝑠) = 𝐹(𝑠) (4.4.8) (𝑠) (𝑠)= 𝑃(𝑠) 1 + 𝐶(𝑠)𝑃(𝑠) (4.4. ) これよりフィードフォワード制御器𝑃−1(𝑠)𝐹(𝑠)と𝐹(𝑠)はともにプロパーとなり目標値応 答特性を伝達関数𝐹(𝑠)で、外乱特応答性を𝐶(𝑠)に独立して設定可能となる。 Fig.4.4.1 フィードバック制御系(1自由度制御系) Fig.4.4.2 2 自由度制御系 Fig.4.4.3 プロパーな伝達関数による 2 自由度制御系の実現
31
4.4.1 2 由度制御系のための教材開発
目標値フィードフォワード型 2 自由度制御系をわかりやすく解説するための教材につい て記述する。Fig.4 にプレゼンテーションの一部を示す。特徴や利点、制御器の設計法につ いて述べている。 Fig.4 に関連プログラム:m_chap4_2dof の一部を示す。これにはコントローラのパラメ ータやフィードフォワードフィルタについて記述されている。このプログラムでは“sim” コマンドにてモデルファイル:mdl_chap4_2dof が実行されている。Fig.4.4.6 にモデルフ ァイル:mdl_chap4_2dof のブロック線図を示す。2 自由度制御系の効果を明確にするため 比較対象として入力や外乱などを同条件にした 1 自由度制御系を同ファイルに配置されて いる。 Fig.4.4.4 2 自由度制御プレゼンテーション教材32
Fig.4.4.5 m_chap4_2dof
33 先 に 示 し た mdl_chap4_2dof を も と に 作 成 し た 実 験 用 モ デ ル フ ァ イ ル : mdl_chap4_2dof_proj のブロック線図を Fig.4.4.7 に示す。スイッチにて 1 自由度制御と 2 自由度制御をオンライン上で切り替え可能にするため、2 つのコントローラを配置している。 各所にゲインゼロが乗算できるような構成にし、加えてモータの保護のためにサチュレー ションを直列に挿入した。これらの工夫で誤った入力信号が印加され、意図しない挙動が 起きてしまっても装置の破損に直結することはない。また、速度エンコーダの信号をフィ ードバックさせ用いるマルチループ制御や連続軌跡追従制御では、速度エンコーダの信号 の雑音対策としてローパスフィルタを挿入した。
この実験ファイルに対応した Control desk のレイアウト:lay_chap4_2dof_proj を Fig.4.4.8 に示す。各パラメータのゲインにスライダー等をリンクさせ、オンラインで入力 信号、コントローラの制御入力や外乱オブザーバの出力を調整することが可能となってい る。また、スイッチを用いてアンチワインドアップの有無や1 自由度、2 自由度の変更など 制御系のマイナーチェンジが可能で、モデルファイルを変更し、改めてビルドを行うこと なく制御系が変更できるようにするなどの工夫を施してある。 Fig.4.4.7 mdl_chap4_2dof_proj 内のブロック線図
34
35
4.4.2 開発教材を用いた 2 由度制御系設計
実際にFig.2.1 で示したシステムに対して本教材の chapter4 の流れに沿って制御系を設 計、シミュレーション、実験を行った。前節と同様に 2 自由度制御系を例に挙げ、その具 体的な手順について述べる。 2 自由度制御系を設計するにあたり、まずフィードバック制御系(1自由度制御系)を設計 しなくてはならない。制御器としては工学的な意味および機能が明瞭のため、汎用的に用 いられているPID 制御器を利用する。PID 制御器のパラメータ調整法としてはジーグラー とニコルスの限界感度法が著名な方法として知られているが、ここでは本試験にて用いた PID 制御器の設計手順の概略を述べる。PID 制御器の伝達関数𝐶(𝑠)は次式で表される。 𝐶(𝑠) = 𝑇2𝑠 + 1𝑇 1 ・𝑇4𝑠 + 1 𝑇3+ 1 (4.4. ) 𝑇1~𝑇4はPID 制御器の設計パラメータで、ここでは制御帯域 ω=20 rad/s とした。このとき の各パラメータの設計手順について述べる。まず、𝐶(𝑠)・𝑃(𝑠)の開ループ伝達関数を考慮し、 制御対象の極を打ち消すために𝑇4の値を決定する。 𝐶(𝑠)・𝑃(𝑠) = 𝑇2𝑠 + 1 𝑇1 ・ 𝑇4(𝑠 + 1 𝑇⁄ )4 𝑇3+ 1 ・ 118.41 𝑠(𝑠 + 0.174) (4.4.10) つまり、1 𝑇⁄ = 0.174 となるように𝑇4 4を決定する。 𝑇2の値は低域での接点周波数を決定するためのパラメータで経験則から制御帯域ω の1 4⁄ 程度とし、 𝑇2= 1 𝜔 4 ⁄ = 4 𝜔 (4.4.11) と決定した。 𝑇3の値は高域での接点周波数に関係する。サンプリング時間やモータのインナーループ、 アウターループを考慮し、 𝑇3=4𝜔1 (4.4.1 ) と決定した。以上のように𝑇2~𝑇4を決定し、𝑇1についてはひとまず、 𝑇1 = 1 (100⁄20)= 1 (4.4.13) として𝐶(𝑠)・𝑃(𝑠)開ループのボード線図を確認する。すると Fig.4.4.9 のように制御帯域の ゼロクロス周波数が制御帯域からずれているのが確認できる。このずれを改善するように𝑇1 を決定する。Fig.4.4.10 のボード線図よりゼロクロス周波数のゲインを約 14 dB 下げれば よいことがわかる。よってこれより𝑇1を次のように決定する。36 𝑇1= 1 (10−14⁄20)= 4.4 7 (4.4.14) 以上からPID 制御器の各パラメータ𝑇1~𝑇4が決定した。このように決定した後の𝐶(𝑠)・𝑃(𝑠) 開ループのボード線図をFig.4.4.10 に示す。これにより、ゼロクロス周波数が 20 Hz に調 整ができたことが確認できる。 Fig.4.4.9 改善前𝐶(𝑠)・𝑃(𝑠)ボード線図 Fig.4.4.10 改善後𝐶(𝑠)・𝑃(𝑠)ボード線図
37 2 自由度制御系においては制御器のみでなくフィルタの設計も行わなくてはいけない。対 象モデルの式(3.11)の相対次数が 2 であることを考慮し、𝐹(𝑠)𝑃(𝑠)−1がプロパーとなるよう にフィードフォワードフィルタ𝐹(𝑠)を設計した。コントローラの制御帯域を考慮し、フィル タの補償帯域を𝜔𝑓 = 40 rad/s とした。 𝐹(𝑠) = 1 ( 𝑠 𝜔⁄ 𝑓+ 1)2 (4.4.1 ) 前述のように各設計パラメータを決定し、シミュレーション、実験を行った。シミュレ ーション結果をPID 制御と比較し Fig.4.4.11 に示す。オーバーシュートが改善されている のが確認できる。また、同じ制御系を用いた実験結果をFig.4.4.12 に示す。シミュレーシ ョンと同様にオーバーシュートが改善されている。 Fig.4.4.11 2 自由度制御系シミュレーション結果 (実行ファイル:m_chap4_2dof_motor)
38
39
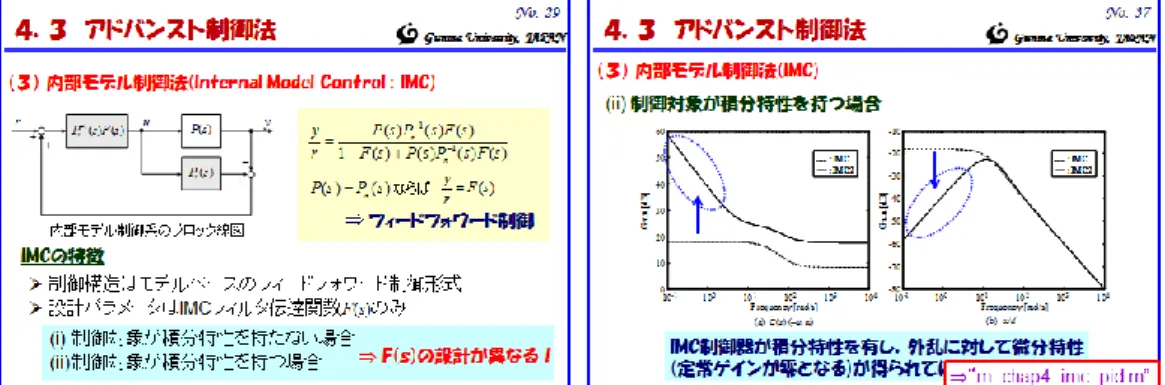
4.5 内部モデル制御系(IMC)
モデルベースド制御の一つであるIMC 法(Internal Model Control)のブロック線図は、制 御対象𝑃(𝑠)とそのノミナルモデル𝑃𝑛(𝑠)を用いて Fig.4.5.1 のように示すことができる。ここ で、𝐹(𝑠)は伝達関数𝐹(𝑠)𝑃𝑛−1(𝑠)をプロパーとする低域通過型の伝達関数で、IMC フィルタ と呼ばれる。このとき、rからyまでの伝達関数は、 𝑟= 𝑃(𝑠)𝑃𝑛−1(𝑠)𝐹(𝑠) 1 𝐹(𝑠) + 𝑃(𝑠)𝑃𝑛−1(𝑠)𝐹(𝑠) (4. .1) である。もし𝑃(𝑠) = 𝑃𝑛(𝑠)であれば 𝑟= 𝐹(𝑠) (4. . ) となり、設計した𝐹(𝑠)が目標値応答特性そのものとなる。図から、𝑃(𝑠) = 𝑃𝑛(𝑠)のときには フィードバックループは動作せず、フィードフォワード制御となる。すなわち、𝑃(𝑠) ≠ 𝑃𝑛(𝑠) のときのみフィードバック制御が動作する。 このように、IMC ではモデル𝑃𝑛(𝑠)が与えられれば設計パラメータは𝐹(𝑠)のみとなり、 𝐹(0) = 1 (4. .3) となる設定でステップ指令に対して定常偏差のない応答が得られる。制御対象の相対次数 がnのとき、もっとも簡単な𝐹(𝑠)は 𝐹(𝑠) =(𝑠 𝜔 1 𝑖𝑚𝑐 ⁄ + 1)𝑛 (4. .4) となり、設計パラメータはフィルタの制御帯域幅𝜔𝑖𝑚𝑐のみとなる。 Fig.4.5.1 IMC 制御系ブロック線図
40 IMC を適用する場合には、制御対象が積分特性を持つかどうかにより IMC フィルタ設計 において注意が必要である。制御対象が積分特性を持った系であるとき、IMC 制御器では 外乱に対し定常偏差が残ってしまう。 本来、IMC 制御器は 1 型の積分特性を持つため、理想的にはステップ応答に対して定常 偏差は残らない。しかしながら、制御対象が積分特性を持つとき、𝑃𝑛−1(𝑠)に含まれる 1 階微 分特性により相殺され、その結果IMC 制御器には積分特性が無くなってしまう。その結果、 ステップ外乱に対して定常偏差が生じる。 今回用いた対象のように位置制御系など、制御対象が積分特性を含む場合、上記の理由 からIMC は外乱応答に対し定常偏差が残るため有効ではない。これを解決する手法として IMC フィルタ𝐹(𝑠)を次のように設計する。外乱に対して 1 型の特性、すなわち IMC 制御器 に積分特性を持たせるために式(4.5.4)の IMC フィルタを 𝐹(𝑠) = (𝑛 + 1)𝑠 𝜔𝑖𝑚𝑐 + 1 (𝑠 𝜔⁄ 𝑖𝑚𝑐+ 1)𝑛 (4. . ) と修正する。
この手法はIMC-PID 制御系と呼ばれ、IMC 制御器を等価的に PID 制御器とみなすこと
41
4.5.1 IMC 制御系のための教材開発
IMC 制御系について学修するための教材について述べる。Fig.4.5.2 にプレゼンテーショ ン教材の一部を示す。特徴や利点、制御器の設計法について解説している。関連プログラ ム:m_chap4_imc ではコントローラのパラメータや IMC フィルタや IMC-PID フィルタの パラメータが記述され、モデルファイル:mdl_chap4_imc のシミュレーションが実行され ている。
Fig.4.5.2 内部モデル制御プレゼンテーション教材
42
Fig.4.5.4 に mdl_chap4_imc のブロック線図を示す。制御対象𝑃(𝑠)とそのモデル 𝑃𝑛(𝑠)は
積分特性を含む。IMC 制御系と IMC-PID 制御系を比較することで外乱特性改善の効果を 明確に示している。
対応する実験用モデルファイ ルを作成するにあ たり、コーデックの簡単化の ため Fig.4.5.5 のように IMC 制御器を等価変換し実験用モデルファイルを作成した。Fig.4.5.6 にmdl_chap4_imc に関連した実験用モデルファイル:mdl_chap4_imc_proj を示す。この 実験用モデルファイルではIMC 制御器と IMC-PID 制御器を配置し、対応した Control desk のレイアウト:lay_chap4_imc_proj にてオンラインで IMC 制御系と IMC-PID 制御系が切 り替え可能となっている。
Fig.4.5.4 mdl_chap4_imc 内のブロック線図
43
44
4.5.2 開発教材を用いた IMC 制御系設計
本教材の流れに沿ってIMC 制御系、IMC-PID 制御系を Fig2.1 のシステムに対して適用
した。IMC フィルタは制御帯域を考慮し、𝜔𝑖𝑚𝑐 = 0 rad/s とした。その伝達関数は次式で ある。 𝐹(𝑠) =(𝑠 𝜔 1 𝑖𝑚𝑐 ⁄ + 1)2 (4. .7) 制御対象のモデルは式(3.11)を利用したが、これは積分特性を持つために式(4.5.7)のフィ ルタでは外乱応答に定常偏差が残ってしまう。そこで外乱に対して 1 形の特性を持たせる ためにIMC-PID 制御系の適用では式(4.5.8)のフィルタを以下のように修正する。 𝐹(𝑠) =(𝑠 𝜔3 𝜔⁄ 𝑖𝑚𝑐+ 1 𝑖𝑚𝑐 ⁄ + 1)3 (4. .8) これらのフィルタを用いてシミュレーション、実験を行った。Fig.4.5.7 にシミュレーショ ン結果、Fig.4.5.8 に実験結果を示す。シミュレーション結果では IMC 制御系はオーバーシ ュートもなく理想的な結果が得られているが、実験結果のIMC 制御系では外乱に対して 1 形の特性を持ち合わせていないために外乱であるモータの摩擦により、定常偏差が残って しまう。一方、IMC-PID 制御ではオーバーシュートがでるものの、外乱に対する定常偏差 が改善されている。
45
Fig.4.5.7 IMC、IMC-PID シミュレーション結果 (実行ファイル:m_chap4_inc_motor)
46
4.6 連続軌跡追従制御系 (CPT)
加速度軌跡を有する目標値への位置追従特性を改善する手法に 連続軌跡追従制御系 (continuous-path tracking (CPT) control system)がある。Fig.4.6.1 に CPT 制御系のブロ
ック線図を示す。図中の𝑝、𝑣、𝑎、はそれぞれ位置、速度、加速度(本研究で用いたモータ では角度、角速度、角加速度)であり、𝑝 、𝑣 、𝑎 はその目標値である。𝐾はサーボアンプ の電圧指令などの操作量 から𝑎までの変換ゲインを表す。また、𝑘𝑝、𝑘𝑣は位置および速度 フィードバックゲインである。 Fig.4.6.1 連続軌跡追従制御系 この制御系も𝑝 から へのフィードフォワードパスを持ち、2 自由度制御構造となってい る。このブロック線図より、以下の関係式がえられる。 𝑝 = 1 𝑠𝑣 + (4. .1) 𝑣 = 1 𝑠𝑎 (4. . ) 𝑎 = 𝐾 (4. .3) = 𝑘𝑣(𝑣 𝑣) + 𝑘𝑝(𝑝 𝑝) + 1 𝐾𝑎 (4. .4) まずは外乱d=0 とする。これらの関係より 𝑝 = 𝑠12𝐾 {𝑘𝑣(𝑣 𝑣) + 𝑘𝑝(𝑝 𝑝) + 1 𝐾𝑎 } (4. . ) 𝑝 +𝐾𝑘𝑠2𝑣𝑣 +𝐾𝑘𝑠2𝑝𝑝 = 𝐾𝑘𝑠2𝑣𝑣 +𝐾𝑘𝑠2𝑝𝑝 +𝑠12𝑎 (4. . ) となる。ここで、𝑣 = 𝑠𝑝と𝑣 = 𝑠𝑝 、𝑎 = 𝑠2𝑝 の関係を用いると
v
a
K
p
r pk
p
s
1
s
1
K
1
s
s
vk
d
v
ra
ru
47 𝑝 (1 +𝐾𝑘𝑣 𝑠2 𝑣 + 𝐾𝑘𝑝 𝑠2 𝑝) = 𝑝 (1 + 𝐾𝑘𝑣 𝑠 + 𝐾𝑘𝑝 𝑠2 ) (4. .7) となる。すなわち 𝑝 𝑝 = 𝑣 𝑣 = 𝑎 𝑎 = 𝑠2+ 𝐾𝑘 𝑣𝑠 + 𝐾𝑘𝑝 𝑠2+ 𝐾𝑘 𝑣𝑠 + 𝐾𝑘𝑝= 1 (4. .8) となり、全ての目標値𝑝 、𝑣 、𝑎 に対して、その出力𝑝、𝑣、𝑎は完全に一致することになる。 しかしながら、現実的には操作量 に対する加速度𝑎は比例の関係ではなく、高域で減衰す るような帯域幅を有する。しがたって、全ての周波数で完全追従することは不可能である。 また、加速度フィードフォワードを用いない場合、さらに加速度とともに速度フィード フォワードも用いない場合の伝達特性はそれぞれ、 𝑝 𝑝 = 𝐾𝑘𝑣𝑠 + 𝐾𝑘𝑝 𝑠2+ 𝐾𝑘 𝑣𝑠 + 𝐾𝑘𝑝 (4. . ) 𝑝 𝑝 = 𝐾𝑘𝑝 𝑠2+ 𝐾𝑘 𝑣𝑠 + 𝐾𝑘𝑝 (4. .10) となる。分子の次数が低くなり、もはや式(4.6.8)のように伝達ゲインが 1 とはならない。こ こで、分子の効果は位相進み補償の効果に他ならず、それが失われた結果、制御帯域が狭 帯域化し、目標値追従特性が劣化する。 次に外乱 d に対する影響ついて考える。外乱に対する伝達特性𝑝 ⁄ は、式(4.6.1)から(4.6.4) の関係において、目標値を零(𝑝 = 𝑣 = 𝑎 = 0) とし、 𝑝 = 𝑠 2+ 𝐾𝑘 𝑣𝑠 𝑠2+ 𝐾𝑘 𝑣𝑠 + 𝐾𝑘𝑝 (4. .11) と導出できる。したがって、フィードフォワードの有無に依存しない。つまり、フィード バックゲイン𝑘𝑝、𝑘𝑣の値のみにより決定される。ここで、外乱応答特性を改善するために、 例えば積分特性などの動特性を追加したい場合には、ゲイン𝑘𝑝を動特性を持つ制御器C(s) とすればよく、この場合にも式(4.6.8)で示した目標値の伝達特性は 1 のままである。 以下では、CPT 制御系の有効性を数値シミュレーションにより確認する。ここでは𝐾 = 1、 とする。すると制御対象P(s)は、 P(s) = 1 𝑠2 (4. .1 ) である。現実的にはこのような伝達関数の制御対象は存在しないが、これを実現するため に外乱オブザーバ補償を用いれば、制御対象のノミナル化特性により、近似的にこのよう な伝達特性が実現できる。
48
4.6.1 連続軌跡追従制御のための教材開発
目標値フィードフォワード型 2 自由度制御系を解説するための教材について述べる。 Fig.4.6.2 にプレゼンテーション教材の一部を示す。連続軌跡追従制御のブロック線図や設 計法、他の制御系と比較することによりその特徴が述べられている。関連プログラムを Fig.4.6.3 に示す。制御対象を式(3.11)のモデルとしたときの制御器の各パラメータの設定に ついて記述されている。Fig.4.6.4 にシミュレーションブロック線図を示す。連続軌跡追従 制御の特色である位置、速度、加速度、それぞれ目標値に対して完全追従を表示するため にフィードバックのみの制御系と比較し各信号を表示させている。 Fig.4.6.2 連続軌跡追従制御プレゼンテーション教材 Fig.4.6.3 m_chap4_cpt49 実験用モデルファイル:m_chap4_cpt_proj を fig.4.6.5 に示す。対象保護の工夫に加えて、 速度エンコーダ信号をフィードバックするので、雑音対策としてローパスフィルタを挿入 している。 Fig.4.6.4 m_chap4_cpt 内のブロック線図 Fig. 4.6.5 m_chap4_cpt_proj 内のブロック線図
50
4.6.2 開発教材を用いた連続軌跡追従制御系設計
Fig.4.6.6 に示すように外乱オブザーバ補償を利用し、制御対象のノミナル化特性により、 対象モデルの伝達関数を式(3.11)から式(4.6.15)に近似する。また、プラントモデルを Fig.4.6.6 のようにK、𝑃(𝑠)、1 𝑠⁄ に分けている。 𝐾 = 118.41 (4. .13) 𝑃(𝑠) = 1 (𝑠 + 0.174) (4. .14) 𝑃𝑛(s) = 118.41 𝑠2 (4. .1 ) 制御系の設計はインナーループからパラメータ設計を行う。具体的には外乱オブザーバ →速度制御系→位置制御系の順に設計する。なお、加速度制御系はモデルのゲインから決 定した。外乱オブザーバは十分高帯域に設計し、補償帯域を𝜔𝑑= 00 𝑟𝑎 𝑠𝑒𝑐⁄ とした。こ の帯域を考慮し、速度制御系は𝜔𝑣= 100 𝑟𝑎 𝑠𝑒𝑐⁄ とし、 𝑘𝑣 =𝜔𝐾𝑣 (4. .1 ) と設計した。インナーループの制御帯域を考慮し、位置制御系は𝜔𝑝= 40 𝑟𝑎 𝑠𝑒𝑐⁄ とし、 𝑘𝑣 = (𝜔𝑝)2 𝐾 (4. .17) と設計した。 以上のように制御系を設計し、シミュレーション、実験を行った。入力信号には微分可 能信号としてシグモイド曲線を用いた。シミュレーション結果をFig.4.6.7 に、実験結果を Fig.4.6.8 に示す。 Fig.4.6.6 外乱オブザーバによるノミナル化補償を用いた連続軌跡追従制御系51
Fig.4.6.7 連続軌跡追従制御シミュレーション結果 (m_chap4_cpt_motor)
52
第5章 開発教材を用いた実応用例
5.1 はじめに
5 章では本教材の chapter5 と関連して、実際の現場で必ず問題となる制御入力飽和やむ だ時間とそれらに対する対策について述べる。また、本章では触れないが本教材 chapter5 ではディジタル制御化についてもその利点や離散化における注意点などについても述べて いる。5.2 制御入力飽和に対する補償法
ワインドアップ現象 フィードバック制御に加えフィードフォワード制御により、制御系の高速・高応答かつ 高精度化を目指した場合、制御系は広帯域化する。この広帯域化により操作量が飽和する と制御性能が劣化する。特に、今回用いたサーボ系のように制御器が積分特性を有する場 合にはこの劣化が著しい。制御器の有する積分特性により、目標値追従誤差を積分してい ることに起因する。すなわち、位置が目標値に到達後もその積分値の影響により操作量は すぐには零とならず、しばらくの間±100%の状態を保持する。このような現象をワインド アップ現象とよぶ。Fig.5.2.1 にワインドアップ現象の例を示す。サチュレーションにより 入力信号の飽和により制御性能が劣化しているのが確認できる。53
Fig.5.2.1 ワインドアップ現象 (実行ファイル:m_chap5_no9_fig)
54 アンチワインドアップ補償 このワインドアップ現象を回避するには飽和時に積分動作を行わないようにすればよい。 PID 制御のように積分要素が明確に分割されていれば容易にワインドアップ現象を回避で きるが分割されていない場合は制御器の状態量が実際に対象に加わる信号により駆動する ようにアンチワインドアップ化すればよい。以下にその手法を述べる。 制御器(バイプロパーと仮定)を次のように分割するここで、アンチワインドアップ化 する制御器の伝達関数はバイプロパーな伝達関数と仮定する。もし、厳密にプロパーな場 合には、制御帯域内で周波数特性に影響を与えないよう、十分に高い折点周波数を持つ1 次進み要素を分子に付加し、バイプロパーとすればよい。すると制御器𝐶(𝑠)は定数項𝐶∞と 厳密にプロパーな伝達関数𝐶̅(𝑠)により次式のように分割できる。アンチワインドアップ化し た制御系をFig.5.2.2 に示す。 𝐶(𝑠) = 𝐶∞+ 𝐶̅(𝑠) ( . .1) Fig.5.2.1 より (𝑠) 𝑒(𝑠)= 𝐶(𝑠) = 𝐶∞ 1 + 𝐶𝐹𝐵(𝑠)𝐶∞ ( . . ) ただし、
C
FB(s
)
は 𝐶𝐹𝐵(𝑠) = 𝐶−1(𝑠) 𝐶∞−1 ( . .3) 制御器のアンチワインドアップ化のためには制御器の状態量が実際に加わる信号により 駆動されればよい。この等価変換により、𝐶𝐹𝐵(𝑠)の状態量は必ず飽和後の出力によってのみ 駆動されることとなり、飽和により出力できないにもかかわらず状態を「巻き上げる」こ とが無くなり、ワインドアップ現象を回避できる。 Fig.5.2.2 アンチワインドアップ制御系55 PID コントローラのアンチワインドアップ化の具体例 本研究で用いる実験用モデルファイルの各コントローラは全てアンチワインドアップ化 している。ここでは一例としてPID 制御器のアンチワインドアップ化の手順を以下に示す。 PID 制御器𝐶(𝑠)を定数項𝐶∞と厳密にプロパーな伝達関数𝐶̅(𝑠)に分解する。 𝐶(𝑠) = 𝑇2𝑠 + 1 𝑇1 ・𝑇4𝑠 + 1 𝑇31 ( . .4) 定数項𝐶∞は、 𝐶∞ = 𝑇2・𝑇4 𝑇1・𝑇3 ( . . ) よって𝐶𝐹𝐵(𝑠)は、 𝐶𝐹𝐵(𝑠) = 𝐶−1(𝑠) 𝐶∞−1 ( . . ) = 𝑇𝑇1𝑠 2𝑠 + 1 ・ 𝑇3𝑠 + 1 𝑇4𝑠 + 1 𝑇1・ 𝑇3 𝑇2・𝑇4 ( . .7) = (𝑇1𝑇2𝑇𝑇4 𝑇1𝑇2𝑇3 𝑇1𝑇3𝑇4)𝑠 𝑇1𝑇3 2𝑇4{(𝑇2𝑠 + 1)(𝑇4𝑠 + 1)} ( . .8) 4章で示した各実験用モデルファイルも例外ではなく、上記のようにアンチワインドア ップ補償を施し、Fig.4.4.8 で示すように Control desk にて補償の有無が切り替えられる構 成となっている。
56
5.2.1 アンチワインドアップ補償のための教材開発
アンチワインドアップ補償を学習するために作成したプレゼンテーション教材やサンプ ルプログラムについて示す。Fig.5.2.3 にプレゼンテーション教材の一部を示す。ワインド アップ現象の解説から具体的な補償方法について記している。 サンプルプログラム: m_chap5_awu では各パラメータやコントローラのアンチワインドアップ化が記述されて いる。このプログラム内ではFig.5.2.4 に示すシミュレーション用モデル:mdl_chap5_awu が実行されている。 このシミュレーション用モデルでは補償効果を明確にするためにシンプルな制御系を対 象に補償の有無を比較している。Fig.5.2.5 にそのシミュレーション結果を示す。アンチワ インドアップ補償を施した制御系では大幅にオーバーシュートが低減されている。 Fig.5.2.3 アンチワインドアップ補償プレゼンテーション教材 Fig.5.2.4 mdl_chap5_awu_57
Fig.5.2.5 アンチワインドアップ補償シミュレーション結果 (実行プログラム:m_chap5_awu)
58
5.3 むだ時間補償
実応用の分野では、入力信号に対して制御対象の出力が遅れて現れるシステムが存在す る。本教材で用いたAC サーボモータではむだ時間はないために補償の必要性はないが(第 3 章参照)、むだ時間が目標とする制御帯域幅、すなわち応答性と比較して無視できない場 合にはこのむだ時間を考慮し制御系を設計しなければいけない。 むだ時間に対する補償法の一つにスミス補償法(Smith’s compensation)がある。本節では このスミス補償法について教材の流れに沿って述べる。 むだ時間𝜏を持つ制御対象𝑃(𝑠)を 𝑃(𝑠) = 𝑃0(𝑠)𝑒−𝜏𝑠 ( .3.1) とする。ここで、𝑃0(𝑠)は制御対象𝑃(𝑠)からむだ時間要素𝑒−𝜏𝑠を除いたモデルである。スミ ス補償法によるむだ時間補償の制御系のブロック線図をFig.5.3.1 に示す。むだ時間を含む モデルの出力𝑎により出力信号 を打ち消し、むだ時間を含まないモデルによりフィードバ ック制御系を駆動する。つまり制御器はむだ時間を考慮しないモデル𝑃0(𝑠)に対して設計す ればよい。𝑟から𝑏までの伝達関数は、 𝑏 𝑟= 𝐶(𝑠)𝑃0(𝑠) 1 + 𝐶(𝑠)𝑃0(𝑠) ( .3. ) となり、むだ時間を除いて設計したフィードバック制御系の応答と同一となる。 また、𝑟から までの伝達関数は、 𝑟= 𝐶(𝑠)𝑃0(𝑠) 1 + 𝐶(𝑠)𝑃0(𝑠)𝑒 −𝜏𝑠 ( .3.3) であり、むだ時間のないフィードバック制御系の応答に対して、時間だけ遅れて出力され る。次に、このブロック線図を等価変換するとFig.5.3.2 のように記述できる。ここで、む だ時間がないと仮定し、 𝐶(𝑠) = 1 𝐹(𝑠)𝐹(𝑠) 𝑃0−1 ( .3.4) とおくことにより、この制御系内部モデル制御系と完全に等価な構造となる。ここで、𝐹(𝑠)は IMC フィルタである。このことから、スミス補償において式(5.3.4)のように制御器を設計 すれば、その入出力関係は内部モデル制御構造型のむだ時間補償となり、 𝑟 = 𝐹(𝑠)𝑒−𝜏𝑠 ( .3. ) となる。したがって、設計した𝐹(𝑠)の応答が時間だけ遅れて出力される制御系となる。59
Fig.5.3.1 スミス法補償法によるむだ時間制御系のブロック線図
60
5.3.1 スミス補償のための教材開発
本節では教材としてスミス補償法の効果を明確に示すため、疑似的にむだ時間を持たせ た対象に対しシミュレーションを行いその有効性を示している。 Fig.5.3.3 にプレゼンテーション教材の一部を示す。スミス補償法の特徴やブロック線図 について記している。この中で示されるサンプルプログラム:m_chap5_smith では各パラ メータの解説やスミス補償法を用いるためコントローラの変換等が記述され、シミュレー ション用モデル:mdl_chap5_smith が実行されている。Fig.5.3.4 にそのブロック線図を示 す。制御対象𝑃(𝑠)に<delay>を直列に挿入することで疑似的にむだ時間を持たせている。 また補償の有無を比較するためにスミス補償なしの制御系、むだ時間なしの制御系を同一 条件で並列に作成した。 Fig.5.3.5 にシミュレーション結果を示す。遅れのある対象では制御性能が大きく劣化し ている。一方でスミス補償を施した制御系では理論通りに遅れのない対象の出力波形が< delay>によって設定された時間(0.05 s)だけ遅れている。 Fig.5.3.3 スミス補償法プレゼンテーション教材61
Fig.5.3.4 mdl_chap5_smith 内のブロック線図
Fig.5.3.5 スミス補償シミュレーション結果 (m_chap5_smith)