性に関する研究
著者
富田 航
学位授与機関
Tohoku University
博士論文
半導体ナノワイヤを用いた機械素子
の作製と共振特性に関する研究
東北大学大学院理学研究科
物理学専攻
富田 航
令和2年
iii
目次
第1章 序論 1 1.1 研究の背景. . . 1 1.2 研究の目的. . . 5 1.3 論文構成 . . . 7 第2章 基礎事項 9 2.1 素子の変位. . . 9 2.2 素子の共振周波数 . . . 11 2.3 素子の振動. . . 14 2.4 ダフィング非線形性 . . . 16 第3章 素子の作製 21 3.1 先行研究 . . . 21 3.2 バックゲート電極つきナノワイヤ機械共振器 . . . 24 3.2.1 素子の概要 . . . 24 3.2.2 素子の材料 . . . 24 3.2.3 作製の手順 . . . 25 3.2.4 完成した機械共振器 . . . 31 3.3 直交ゲートナノワイヤ共振器 . . . 32 3.3.1 素子の概要 . . . 32 3.3.2 素子の材料 . . . 33 3.3.3 作製の手順 . . . 34 3.3.4 完成した機械共振器 . . . 37 3.4 ナノワイヤ転写工程の効率化 . . . 37 第4章 素子の測定 41 4.1 測定の準備. . . 414.2 測定装置 . . . 42 4.3 FET測定 . . . 43 4.4 機械共振測定 . . . 44 4.4.1 FETにおける電界効果を用いたナノワイヤの振動検出 . . . 44 4.4.2 周波数Mixingによる高周波信号の低周波化 . . . 45 4.4.3 振動成分の抽出 . . . 46 第5章 バックゲート電極つきナノワイヤ共振器 49 5.1 素子の概要・目的 . . . 49 5.2 I-V測定 . . . 49 5.3 FET測定 . . . 50 5.4 基本共振測定 . . . 51 5.5 加振強度依存性 . . . 52 5.6 DCゲート電圧依存性 . . . 53 第6章 直交ゲートナノワイヤ共振器 55 6.1 素子の概要・目的 . . . 55 6.2 I-V測定 . . . 55 6.3 FET測定 . . . 56 6.4 基本共振測定 . . . 58 6.5 加振強度依存性 . . . 59 6.6 モード間の加振効率の差 . . . 60 6.7 DCゲート電圧依存性 . . . 61 第7章 結論 63 論文・発表リスト 65 謝辞 67 参考文献 69
1
第
1
章
序論
1.1
研究の背景
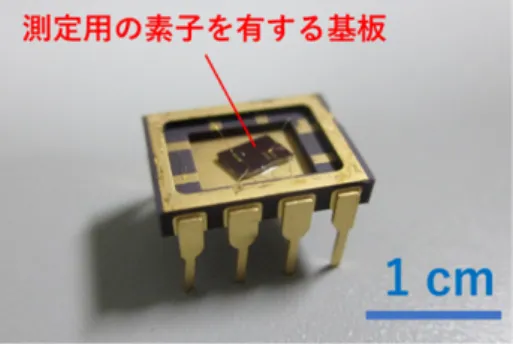
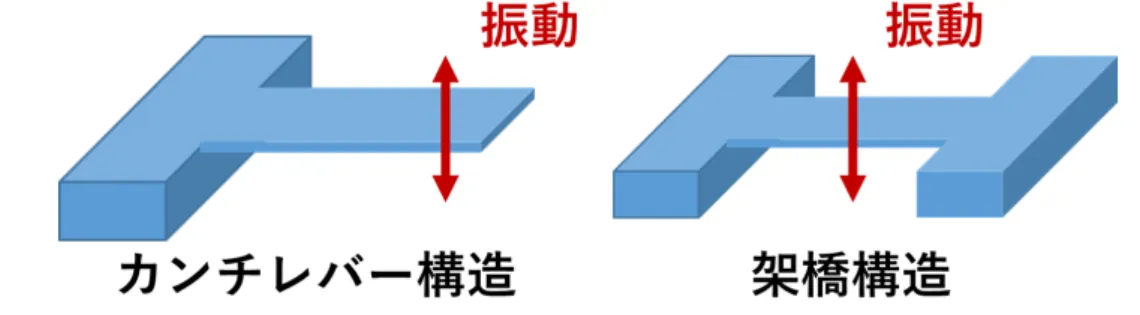
現代の科学技術の目覚しい進歩は半導体の研究の発展に支えられていると言っても過言 ではない。今や我々にとって欠かせない存在となっているスマートフォンなどの電子機器 では、半導体の集積回路がその動作の中心的な役割を担っている。これらの進歩はフォト リソグラフィや電子線リソグラフィといった微細加工技術が近年発展し、トランジスタを はじめとする半導体デバイスの性能や機能が飛躍的に向上してきたことに起因するが、同 時にナノスケールでの微細化が可能になったことによって従来にはない様々な新規デバイ スが作製されるようになった。例えばエレクトロニクスの分野では電子一つを制御する単 電子デバイスが作製されるようになり、低消費エネルギーのデバイスとしての実用化が期 待されている。フォトニクスの分野では自然界には存在しないとされている負の屈折率を 実現可能とするメタマテリアルなどが注目を集めている。その一方でメカニクスの分野、 すなわち構造そのものの機械的な性質に着目したデバイスも、微細化の発展と共に注目 を集めるようになった。図1.1のような片側のみ支持されている片持ち梁構造(カンチレ バー構造)や、両側で支持されている両持ち梁構造(架橋構造)に代表される微小な機械 構造を用い、弾性変形可能な部分の力学的自由度を活用することを特徴とした機械素子が 数多く提案されている。 次章で示すように、これらの素子は機械構造を微細化するほど外部からの力に対する変 位感度が大きくなるため、この性質を利用した高感度なセンサーとしての応用が進められ ている。その最も有名な代表例が原子間力顕微鏡(AFM)である[1, 2]。カンチレバー構 造の先端に位置する探針を試料表面に近づけると、試料表面との間に働く小さな原子間力 によってカンチレバーが弾性変形し、それによるカンチレバー先端の変位をレーザー反射 光の光軸変化として検出することで、原子レベルでの試料表面の凹凸を調べることが出来 る。図1.1 代表的な2つの機械構造素子。(左)片持ち梁構造(カンチレバー構造)と(右) 両持ち梁構造(架橋構造) 微細化された機械素子の力感度の高さを活かした応用例として原子間力顕微鏡の例を 挙げたが、このような微小な機械構造は高周波共振器としての応用も広く研究されてい る。機械共振器は室温で高いQ値(後述)を有する理想的な共振器であり、微細化によっ てギガヘルツ領域への高周波化を実現することができる、このため、モバイル通信の高周 波フィルターや水晶振動子に置き換わるタイミングデバイスなどに用いられようとして いるが、同時に図1.2のように共振特性の変化を検出することによるセンサー応用も進ん でいる。センシングの対象となる物理量は力のみならず多岐にわたり、電荷[3, 4]や質量 [5, 6, 7]のような物理量も高感度に検出することができるため、化学や生物など広い分野 で注目を集めている。またギガヘルツ領域の高周波機械共振器では希釈冷凍機温度で量子 力学的な性質が現れるため、巨視的量子物理の探索や量子情報処理への応用も研究されて いる[8, 9, 10]。
このようなデバイス応用における微小機械構造の作製は、SOI(Silicon on Insulator)基
板などの層状半導体ウェハに対し、リソグラフィとエッチングを用いて機械構造の形状を パターニングし、その後フッ化水素溶液などを用いて埋もれている下部層を選択的にエッ チングする「トップダウン法」と呼ばれる手法で作製されてきた[11]。しかしながらこの トップダウン法はいくつかの課題を抱えているのが現状である。まず、作製できるデバイ スの構造に制限があるという点である。基板に対して水平な二次元方向は、フォトリソグ ラフィや電子ビームリソグラフィなどによって任意の構造をパターニングすることができ る。一方、基板に対して垂直な方向の構造形成においては、選択エッチングを用いて下部 層を削ることにより基板から離間した構造を作る必要がある。これによる構造・材料上の 制約に加え、作製した機械構造がその後のプロセスによって容易に破損されてしまうた め、選択エッチングを最終工程としなければいけないというプロセス手順上の制約があ る。この二つの制約により、作製できる素子構造は大きく制限を受けることになる。例え ば、機械振動子の直下にバックゲート電極を取り付けた構造がその一例で、選択エッチン グにより除去して基板から離間した共振器の下側に金属を蒸着することは容易ではない。
1.1 研究の背景 3 図1.2 機械共振器のセンサー応用。振動する機械共振器の共振周波数が何らかの外的 物理量によって変化し、それによって生じるシグナルの変化を読み取ることでセンサー として機能する。図では本来の青色の共振特性が外的要因によって黄色のようにシフ トしたことで、とある周波数において赤色の矢印のようにシグナルが増幅された例で ある。 また、エッチングによって機械素子の表面にダメージが入ってしまうという課題もある。 このような機械素子表面のダメージはQ値低下の一因にもなる。Q値は振動エネルギーの 散逸の少なさを示すパラメータであり、図1.3のように機械共振器の構造を微細化するほ ど体積に対する表面積の割合が大きくなり、それに伴ってこの影響が大きくなるという報 告がある。センサーなどへの応用を考える際に共振特性におけるQ値の低下は、ノイズに 対する共振シグナルの低下や周波数シフトの読み取りづらさ、すなわちセンシング感度の 低下に繋がるため望ましくない。 上に述べた課題により、今後更なる微細化によってセンシング感度を向上させる、ある いは何かしらこれまでにない新規な機能を持たせるための構造の作製を試みる際には、従 来のトップダウン法では実現が困難な状況が出てくることが予想される。 そこで近年注目を集めているのが、「ボトムアップ法」と呼ばれる結晶成長によって作 製された半導体ナノワイヤやカーボンナノチューブなどの材料を、微小なサイズの機械素 子としてデバイスに組み込み利用する方法である。微細加工技術を用いて材料を削ってい くことによりナノ構造を作製するトップダウン法とは対称的に、ボトムアップ法では結晶 成長や自己組織化などの自然現象を活用し、原子や分子を積み上げていくことによりナノ
図1.3 機械共振器における体積とQ値の関係[12]。 構造を作製する。半導体ナノワイヤは、このようなボトムアップ法によって作製されるナ ノ構造の代表例であり、昨今、次世代の光デバイスやトランジスタへの応用が広く研究開 発されている。ボトムアップ法で作製されたナノワイヤはエッチングプロセスとは無関係 に構造が形成されるため、その表面はダメージのない状態を保つことが可能であり、微細 化しても高いQ値を維持する優れた機械共振器を実現することが期待される。 このナノワイヤのデバイス技術では、成長したナノワイヤを何らかの方法で基板上に配 置したのちにリソグラフィを用いてデバイス化する手法が一般に用いられるが、溝や電極 を基板上にデザインする工程とナノワイヤを組み込む工程が別れているため、トップダウ ン法のみを用いた行程では不可能なバックゲートつきのデバイスなど、より自由度の高い 立体構造を作製できる可能性を秘めている。またその上、ナノワイヤは結晶成長の際に長 さや直径などを精密に制御することが可能なため、エッチングで半導体を削るトップダウ ン法と同様に所望の形状の微細な機械素子を容易に実現することもできる。さらに、結晶 成長技術の進歩により、ナノワイヤにおいては量子ドットやコアシェル構造などの複雑な 半導体ヘテロ構造を組み込むことも可能なため[13, 14]、最近では機械振動と量子現象の 相互作用に関する研究にナノワイヤを用いることが進められている。トップダウン法によ り機械共振器を作り同一基板上に超伝導回路や量子ドットを組み込んだ研究も報告されて いる[15, 16]が、ナノワイヤを機械共振器の材料として用いれば、そのサイズの小ささや 軽さ、あるいはナノワイヤ内部に直接量子構造を組み込めるという利点から、より強い結 合・相互作用が期待できる。 ところが、半導体ナノワイヤを機械素子として用いるには結晶成長させたナノワイヤを
1.2 研究の目的 5 その成長基板から分離して素子に組み込む必要があるが、これは一般には容易ではなく、 これまで先行研究では多くの手法が試みられてきた[17]。例えば次章で述べるように素 子を作製する基板上でナノワイヤを直接結晶成長させる方法 [33]や、結晶成長させたナ ノワイヤを無作為に基板上に分散させた後、顕微鏡で位置を確認しながらリソグラフィで 電極等をパターニングするという手法[36]がある。また、特殊なチップやスタンプを作 製しそれによってナノワイヤを直接運搬するという手法[41, 42, 43]もある。これらの手 法は近年大きく発展を遂げているものの、現状ではトップダウン法に比べて素子の作製に 時間を要する上に、報告されている性能面でもトップダウン法で作製した素子を期待通り に凌駕しているとは言い難い。例えばナノワイヤを基板上に配置する際にその位置精度の 不足からナノワイヤとゲート電極間の距離が開いてしまい、機械素子に対する電界効果が トップダウン法で作製した素子よりも弱くなってしまうなどの問題が生じている。 このように半導体ナノワイヤを用いた機械素子は、応用面ではより高性能なセンサー実 現のため、基礎研究面では量子物理の更なる探索のための材料として期待されている一 方、その素子作製手法は前述のような課題を抱えており、ナノワイヤをより制御性良くか つ効率的に素子に組み込むための新たな作製手法の確立が必要とされている。
1.2
研究の目的
そこで本研究では半導体ナノワイヤを用いた機械素子の特性ならびに機能を格段に向上 させるため、ナノワイヤの高精度位置決め手法の開拓および実証を研究の第一の目的に設 定し、その課題解決策として液滴を用いた新規手法の確立に取り組んだ。そしてこの手法 の応用例の一つとして、従来の作製手法では位置制御性の不足から実現が困難であった直 交ゲートナノワイヤ機械共振器(バックゲートおよびその直交方向にサイドゲート電極を 有するナノワイヤを用いた機械共振器)の実現とその特性評価を本研究の第二の目的と し、実際に共振器作製とその動作の解析を行った。このようなナノワイヤの機械共振器に は断面形状の違いによって直交方向に2つの振動モードが存在するが、共振器が直交する 2つのゲート電極を有することで、この2つの振動モードをそれぞれ検出するだけでな く、より選択的な2つのモードの振動振幅や共振周波数制御、また振動軸の回転なども可 能となる。このような共振器は将来的に微小な力や物理量を二次元的なベクトル量とし て検出できるセンサー応用[18, 19]が期待できるほか、2つの振動モード間の相互作用 [20, 21, 22, 23]を利用して機械振動を高度に制御し、従来とは異なる物理的アプローチで センシング感度を向上させることも期待されている [24]。またQ値の高い機械共振器は 高いセンシング感度が期待される反面、その振動の緩和時間が長く、センサーとして応用 する場合応答速度が遅くなるという問題を抱えているが、本研究のような構造の共振器で は2つの振動モードの周波数を一致させるよう制御し、振動をモード間で遷移させることが可能なため、それによる振動のスイッチングを行い高速応答を実現させるといった応用 [25]も期待できる。 本研究では、まず最初のステップとしてバックゲート電極のみ取り付けられたナノワイ ヤ共振器の作製およびその基本的な動作確認(I-V 特性、FET特性、共振周波数の検出、 ダフィング非線形性の観測、ゲート電極にDC電圧を印加することによる周波数シフトの 観測)を行った。この共振器の完成の後に直交ゲートナノワイヤ共振器の作製を行い、そ の測定を行った。以下ではその2つの結果について報告する。
1.3 論文構成 7
1.3
論文構成
本論文の構成は以下の通りである。 第一章 本研究の背景と目的について述べる。 第二章 本研究で必要となる、架橋構造の機械素子の基本的な物理について述べる。 第三章 本研究の中心となるナノワイヤを用いた機械共振器の作製方法について述べる。 第四章 本研究で作製した共振器の特性を調べるために行った測定について述べる。 第五章 作製したバックゲート電極つきナノワイヤ共振器の測定結果について述べる。 第六章 作製した直交ゲートナノワイヤ共振器の測定結果について述べる。 第七章 本研究をまとめ、結論と将来展望を述べる。9
第
2
章
基礎事項
本研究の主題はナノワイヤを用いた架橋構造素子の機械共振特性についてである。本章 では、このような素子の振動特性を研究するために必要な知識として、架橋構造素子の基 本的な振る舞い、具体的には力が加わった時の素子の変位や共振特性、さらには振動振幅 が大きくなった時に出現するダフィング非線形性について、材料力学や機械振動学といっ た理論を用いて、その概要を説明する。2.1
素子の変位
機械素子では、一般に機械振動を行う梁や薄膜などの微小構造に電気的な手法で周期的 な力を加え、それに応じて引き起こされた機械振動を用いて機能を出現させる。そこで、 まず最初に本研究で用いる架橋構造素子の中心位置が外力によってどの程度変位するかを 説明する。図 2.1のような直径 d、長さ l の両端が固定された円筒上の架橋構造を考え る。ヤング率をE 、梁の断面二次モーメントをI ( y軸まわりはIy 、z 軸まわりを考え る場合はIz )とする。ここで図2.2のように梁の中央に下向きの力F を加える。梁は対 図2.1 架橋構造素子称なのでこのとき点A,点Bにはつり合いのためにそれぞれ同じ大きさの上向きの力が加 わる。地点x における、ひずみが生じない梁の中立面のy 軸方向の変位をδ(x)とする。 図2.2 中心に加わる力と生じる変位および曲げモーメント 変位は左右対称なので、ここでは0 < x < 12lの領域について考察する。またこのときの 点A ( x = 0, y = 0 )に生じる曲げモーメントをM0とする。 まず点Aおよび点Bにおけるせん断力を考えると、左右の対称性よりそれぞれ 1 2F の 力がかかっていることが分かる。梁を地点 xの断面で切り取って考えると、この地点x の断面においてもこの力とのつり合いのために下向き方向のせん断力 1 2F が加わっている と考えることができる。また点Aからの距離x とこの断面に働く力の積が曲げモーメン トに寄与する。よって梁のたわみ方程式は、 EI∂ 2δ(x) ∂x2 =− 1 2F x + M0 EI∂δ(x) ∂x =− 1 4F x 2 + M0x + C1 EIδ(x) =− 1 12F x 3 + 1 2M0x 2 + C1x + C2 (2.1) ただしC1およびC2は定数である。境界条件より点A( x = 0 )ではδ(0) = 0かつ ∂x∂δ = 0 なので、 C1 = 0 C2 = 0 (2.2) また梁の中央( x = 12l )では同様に ∂δ ∂x = 0より、 M0 = 1 8F l (2.3) よって2.2と2.3より、 δ(x) = F 4EIx 2 (−1 3x + 1 4l) (2.4)
2.2 素子の共振周波数 11 したがって梁の中央の変位はx = 12lを代入して、 δ(x = 1 2l) = F l3 192EI (2.5) となる。断面二次モーメントI は Iy = ∫∫ z2dydz Iz = ∫∫ y2dydz (2.6) となるので、断面が直径dの円の場合は Iy = Iz = 1 64πd 4 (2.7) である。もし断面が幅a ( z軸方向)、高さb ( y軸方向)の長方形であれば Iy = 1 12a 3b Iz = 1 12ab 3 (2.8) となる。 ここで再度図2.1のような構造を考え、材料のヤング率をE = 100 (GPa) [26]、梁の長 さlを直径dの100倍とし、その中央部分に1 nmの変位を与えるために必要な力F を梁 の直径dのスケールを変えて考察すると表2.1のようになる。 表2.1 梁の直径と、そのとき中心部分に1 nmの変位を与えるために必要な力の関係 梁の直径を1 nmにまでスケールダウンさせたときに中央を1 nm変位させるのに必要 な力は9.42× 10−13 (N)である。これは1 cm 離れた1円玉どうしにはたらく万有引力 6.67× 10−13(N)と同じレベルの力である。1 nmの変位はレーザー光を用いた干渉計など で容易に検出できるので、このようなナノスケールの微小な機械構造素子が外力を高感度 に検出できる優れたセンサーとして利用できる可能性が示唆される。
2.2
素子の共振周波数
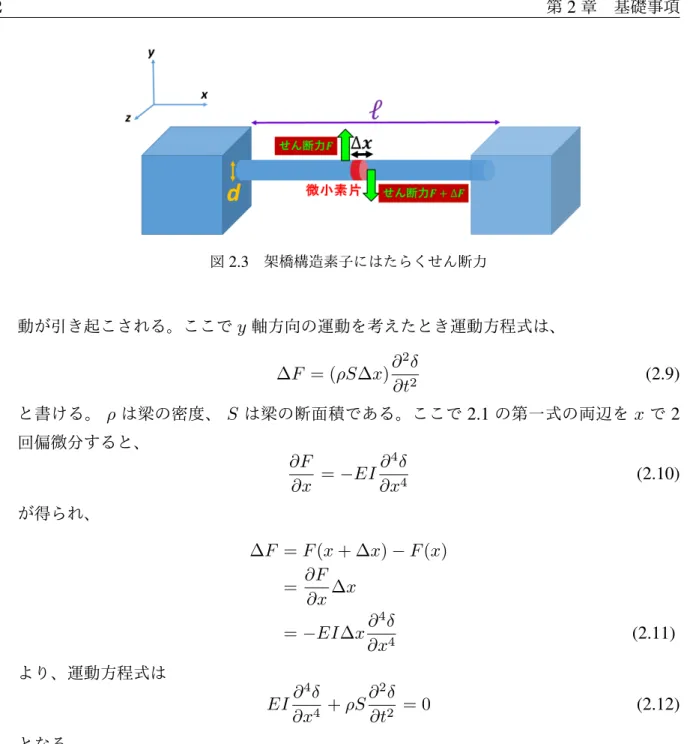
次にこのような架橋構造素子が振動するときの共振周波数について考える。運動してい る梁においては、図2.3のような微小素片の両側にはたらくせん断力の差∆F によって運図2.3 架橋構造素子にはたらくせん断力 動が引き起こされる。ここでy軸方向の運動を考えたとき運動方程式は、 ∆F = (ρS∆x)∂ 2δ ∂t2 (2.9) と書ける。 ρは梁の密度、S は梁の断面積である。ここで2.1の第一式の両辺をxで2 回偏微分すると、 ∂F ∂x =−EI ∂4δ ∂x4 (2.10) が得られ、 ∆F = F (x + ∆x)− F (x) = ∂F ∂x∆x =−EI∆x∂ 4δ ∂x4 (2.11) より、運動方程式は EI∂ 4δ ∂x4 + ρS ∂2δ ∂t2 = 0 (2.12) となる。 通常の波動方程式は座標に対して2階の微分方程式であるが、梁の運動方程式は座標に 対して4階の微分方程式になる。この理由は、通常の波動方程式では隣り合う微小素片間 の変位差が素片に作用する力を与えるが、梁では変位差ではなく曲率差に比例する力が働 くからである。時間と座標に関して
δ(x, t) = ∆(x)(A sin ωt + B cos ωt) (2.13)
と変数分離を行い、この方程式を解く。δ(x, t)を代入すると、 EI∂ 4δ ∂x4∆(x)− ρSω 2 ∆(x) = 0 (2.14) ∂4δ ∂x4∆(x)− k 4 ∆(x) = 0 (2.15)
2.2 素子の共振周波数 13 ただしここで k2 = ω √ ρS EI (2.16) とおいた(分散関係)。運動方程式は座標に関して4次の方程式であるから独立解は4つ存 在し、
∆(x) = A sin(kx) + B cos(kx) + C sinh(kx) + D cosh(kx) (2.17)
で与えられる。ただしA, B, C, Dは任意の定数である。 次に境界条件を考える。両端が固定された架橋構造では端で変位も傾きも0であると考 えられるので、 ∆(0) = 0 ∆′(0) = 0 ∆(l) = 0 ∆′(l) = 0 が成り立つ。これを一般解2.17に代入して式を整理すると (
sin(kl)− sinh(kl) cos(kl)− cosh(kl) cos(kl)− cosh(kl) − sin(kl) − sinh(kl)
) ( A B ) = 0 (2.18) C =−A, D = −B (2.19) が得られる。行列方程式が自明でない解をもつためには行列式の値が0でなければならな いので、klに対する条件として cos(kl) cosh(kl) = 1 (2.20) が導かれる。これを満たすklの値は kl = 4.730, 7.853, 10.996,… であり、小さい方から順にλ0, λ1, λ2,… とおく。分散関係の式2.16よりn次の共振周波 数ωn は、 ωn = λ2n l2 √ EI ρS (2.21) で与えられる。 今回はy軸方向の運動を考えているのでI = Izを代入すればよいが、I = Iy を代入す れば同様に z 軸方向の運動の振動の共振周波数を得ることができる。第6章で示すよう に、実験では異なる二つの周波数の機械共振が観測されている。この二つの周波数は、直 交する二つの方向の断面二次モーメントに対応し、ナノワイヤの断面が異方性をもってい ることに起因していると考えられる。
2.3
素子の振動
次にこのような架橋構造素子の振動について説明する。 先に求めたn次の振動モードに対する固有関数をun(x)とする。この固有関数は ∫ l 0 ui(x)uj(x) dx l = δij (2.22) を満たすように規格化されているものとする。素子の振動はこのような固有関数をもつ各 振動モードを調和振動子とみなし、その線形重ね合わせと考えることができる。このとき 系全体のハミルトニアンは H[p, q] = ∞ ∑ i=0 ( p 2 i 2m + mωi2q2i 2 ) (2.23) と記述することができる。ただしmは梁全体の質量、pi, qiはそれぞれi番目のモードに 対応する正準共役な運動量と座標である。梁のある地点xにおける変位δは δ(x, t) = ∞ ∑ i=0 qi(t)ui(x) (2.24) となる。 今、考えている架橋構造素子のモデルにはモード間相互作用がないとすると、このハミ ルトニアンの一つのモードだけを抜き出して取り扱うことができる。高次のモードを無視 し最低次のモードのみを考えるとハミルトニアンは H0(p, q) = p2 2m+ mω2 0q2 2 (2.25) で与えられ、これに対する正準方程式よりqに対する運動方程式 m¨q =−mω02q (2.26) が導かれる。(ここで最低次のモードの添え字i = 0は簡単のため省略した。)これはよく 知られた単振動の方程式である。 次にこの最低次の振動モードに周期的な外力と摩擦が加わった時の運動を考える。摩擦 係数をΓ≡ mω0/Qとすると運動方程式は m¨q + mω0Q−1q + mω˙ 20q = F0cos(ωt + ∆) (2.27)2.3 素子の振動 15
となる。ここでQはQ値とよばれるエネルギー散逸の少なさを示すパラメータである。
複素表示
q(t) = Re[ˆq(t)] F0cos(ωt + ∆) = Re[ ˆF0eiωt]
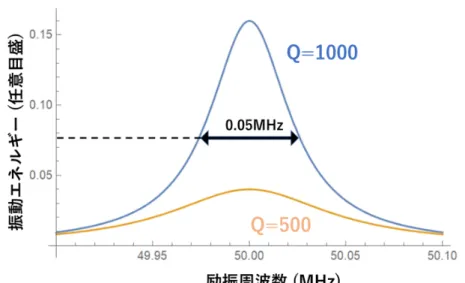
ˆ F0 = F0ei∆ (2.28) を用いると、方程式は m¨q + mωˆ 0Q−1˙ˆq + mω02q = ˆˆ F0eiωt (2.29) のような複素方程式の実部で与えられる。定常解を求めるためにq(t) = ˆˆ q0eiωtとおくと ˆ q0 = χ0(ω) ˆF0 χ0(ω)≡ 1 m(ω 2 0 − ω 2 + iω0ω Q ) −1 (2.30) が得られる。このχ0(ω)は複素感受率と呼ばれ、周期的な外力に対する振動子の応答を表 現している。最終的に定常解は q(t) = Re|χ0(ω)|F0cos(ωt + ∆′) ∆′ = arg[χ0(ω)] + ∆ (2.31) で与えられる。また|ω − ω0| ≪ ω0の場合、振動エネルギーは E = m ˙q 2 2 + mω2 0q2 2 = m|χ0(ω)| 2 F02ω20 2 [1 + ω2− ω02 ω20 sin 2 (ωt + ∆′)] ∼ mω20 2 |χ0(ω)| 2 F02 (2.32) となり、その周波数依存性は図2.4のようになる。横軸は周期的外力の周波数ω (MHz)で あり、縦軸は振動のエネルギー E (スケールは任意)を表している。すなわち振動エネル ギーは外力の周波数が素子の共振周波数と一致するときに最大となり、Q値が大きくなる ほど共振ピークは鋭くなる。また、Q値は共振周波数( 50 MHz )を最大エネルギーの半 値幅( 0.05 MHz )で割った値に一致していることが確認できる。
図2.4 振動エネルギーの励振周波数依存性
2.4
ダフィング非線形性
最後に、このような素子の振動振幅が大きくなったときに生じるダフィング非線形性に ついて説明する。架橋構造では梁の伸びが引き起こす張力によってダフィング非線形性が 引き起こされることが知られており、その効果によって共振特性がどのように変化するか を示す。図のように変位δ(x)が与えられた場合梁全体の伸びは 図2.5 梁が変位したときに生じる梁全体の伸び ∆l = ∫ l 0 dx √ 1 + (∂δ ∂x) 2 − l (2.33)2.4 ダフィング非線形性 17 となる。この時、系全体に梁の伸び∆l によるエネルギーが加わり、また梁の長さ方向の 伸びに対するバネ定数は ES l で表されるため、ハミルトニアンは H[p, q] = ∞ ∑ i=0 ( p 2 i 2m+ mωi2qi2 2 ) + ES 2l ∆l 2 (2.34) のように書き直される。梁の傾き ∂δ ∂x は十分小さいとし、式を展開すると H[p, q] = ∞ ∑ i=0 ( p 2 i 2m + mω2 iqi2 2 ) + ES 8l [ ∫ l 0 (∂δ ∂x) 2 dx]2 (2.35) と変形できる。式より、 H[p, q] = ∞ ∑ i=0 ( p 2 i 2m + mωi2qi2 2 ) + EV 8 ( ∞ ∑ i,j=0 dijqiqj)2 dij = ∫ l 0 u′i(x)u′j(x)dx l (2.36) となる。一つのモードにのみ着目すると(i = j とすると)ハミルトニアンは H0(p, q) = p2 2m + mω02q2 2 + cq4 4 c = EV 2 ( ∫ l 0 u′2dx l ) 2 (2.37) で与えられ、運動方程式は m¨q + mω0Q−1q + mω˙ 02q + cq 3 = F0cos(ωt + ∆) (2.38) となる。 この左辺の第4項がダフィング非線形項である。梁の振動振幅が大きくなると変位の4 乗に比例する梁全体の伸縮によるエネルギーが無視できなくなり、運動方程式に3次の非 線形性が現れることになる。このダフィング方程式を以下のように書き直す。 ¨ q + ω0Q−1q + ω˙ 02(1 + αq 2 )q = F0′cos(ωt + ∆) (2.39) 式2.27と比較すると左辺第3項、すなわちバネによる復元力の部分に非線形性の影響が 出ていると考えることができる。この係数αが正の場合、実効的なバネ定数は振幅の増加 と共に大きくなり(ハードニング)、逆に負の場合、実効的なバネ定数は小さくなる(ソ フトニング)。非線形性が小さく、振動の減衰も小さく、周期的な外力の振幅も小さいと 仮定する。正の無次元パラメータϵを用いて方程式を ¨ q(t) + ϵω0Q−1q(t) + ω˙ 02(1 + ϵαq 2 )q(t) = ϵF0′cos(ωt + ∆) (2.40)
と書き直し、ϵについてべき展開する。解は q(t) = A cos ωt + ϵq1(t) + ϵ2q2(t) + ... (2.41) と書くことができる。また共振周波数近傍の周波数応答を考えているとすると外力の周波 数は ω = ω0+ ϵω1+ ϵ2ω2+ ... (2.42) とおける。ここで簡単のためωt = θとすると式2.40と式2.41は ω2q(θ) + ϵωω¨ 0Q−1q(θ) + ω˙ 20(1 + ϵαq 2 )q(θ) = ϵF0′cos(θ + ∆) (2.43) q(θ) = A cos θ + ϵq1(θ) + ϵ2q2(θ) + ... (2.44) となる。ここでドットは d dθ を意味している。 変数変換した方程式 2.43にq とω を代入しϵ の次数が同じ項を比較する。0次のオー ダーは全て消えるので1次のオーダーを見ると
ω20q¨1+ ω20q1− 2Aω0ω1cos θ− Aω02Q−1sin θ + αA 3 ω20cos3θ = F0′cos(θ + ∆)(2.45) となっている。三角関数の公式を用いてまとめると ¨ q1+ q1 = (2 ω1 ω0 A− 3 4αA 3 + F ′ 0 ω2 0 cos ∆) cos θ + (A Q − F0′ ω2 0 sin ∆) sin θ− 1 4αA 3 cos 3θ となる。ここで右辺のsin θとcos θの項は0になる必要がある。そうしなければ系の固有 周波数と外力の周波数が一致し、周期解が得られないことになるからである。したがって 2ω1 ω0 A− 3 4αA 3 + F ′ 0 ω02 cos ∆ = 0 A Q − F0′ ω02 sin ∆ = 0 を得る。これらの方程式の両辺を2乗し辺々を足し合わせると位相角∆を消去でき (F ′ 0 ω02) 2 = (A Q) 2+ (2ω1 ω0 A− 3 4αA 3)2 (2.46) を得る。これをω1 について解くと ω1 ω0 = 3 8αA 2± √ ( F ′ 0 2Aω20) 2− ( 1 2Q) 2 (2.47)
2.4 ダフィング非線形性 19 の関係式が得られる。よってϵを1次のオーダーまで考えたときは ω ω0 = 1 + 3 8ϵαA 2± √ ( ϵF ′ 0 2Aω02) 2− ( ϵ 2Q) 2 (2.48) となる。外から加振される周波数 ωと共振周波数ω0 のずれに対する振動振幅Aの関係 は図2.6のようになる。すなわちハードニング型の場合、共振ピークは右側に曲がり、ソ 図2.6 非線形効果が大きいときの加振周波数に対する共振ピークの変化を示したグラ フ。青色のグラフがハードニング型、赤色のグラフがソフトニング型のダフィング非線 形性を示している。 フトニング型の場合共振ピークは左側に曲がる。例えばハードニング型のダフィング非線 形性を示す機械共振器を、共振周波数より低い周波数から徐々に周波数を上げて加振して いく場合、図2.6の青色の矢印で示したように振幅が最大に達したあと、急激に振幅が下 がる現象が観測される[27]。
21
第
3
章
素子の作製
本章では序論で紹介した先行研究についてより詳しく述べた後、本研究で作製した2種 類の機械共振器の作製手法について述べる。作製手法の説明に主眼を置き、共振器の意義 や特性などについては後の章で詳細に述べることとする。3.1
先行研究
序論で述べたように、ナノスケールの機械素子が注目を集め始めた時、その作製手法は 半導体材料をエッチングによって削るトップダウン法が中心であった[11]。現在実用化さ れているものの多くもこのトップダウン法で作製されたものである。トップダウン法の最 大の利点は機械構造の作製の簡便さにあり、集積化も容易である。また基板表面に対する 二次元方向には、電子ビームを用いてパターンニングできるため作製できる構造の自由度 が高く、例えば、S. Evoyらは図3.1左のようなパドル型の機械共振器を作成し、直交す る振動モードだけでなくねじれ方向の機械共振モードを検出した。 A. N. ClelandとM. L. Roukesは図3.1 右のような同種のパドル型機械共振器を用いて非常に感度の高い電荷 の検出に成功している。その他にも低次元系と結合させた素子など、様々な構造の素子が トップダウン法によって作製され、その研究成果が報告されている[29, 30, 31, 32]。 これらのトップダウン法に対し、ボトムアップ法で作製されたナノワイヤを機械素子とし て用いる試みが近年盛んになってきているのは序論で述べた通りである。ここでいくつか そのような作製手法に関する先行研究を紹介する。 まず最初に挙げられるのは、予め基板上に対抗する2つの電極を作製し、そこでナノワ イヤを直接結晶成長させるという手法[33, 34, 35]である。例えばM. Sansaのグループ は、シリコンナノワイヤを用いて図3.2左のような架橋構造を作製し、その機械共振を測 定した。このように素子上でナノワイヤを直接成長させる手法では機械構造の作製が容易 であるというメリットがある反面、ナノワイヤは触媒となる金属粒子から成長するため、図3.1 (左)ねじれ方向の運動も利用したパドル型共振器[28]。(右)ねじれ方向の運動 を利用し高感度な電荷検出を実現したパドル型機械共振器[3] その位置を厳密に決めることは困難である。この方法を用いるときは触媒となる金属粒子 を複数撒くことが多く、図3.2左の赤い丸で示したように所望の場所以外にナノワイヤが 成長し素子の動作の妨げとなる可能性もある。 図3.2 (左)対となる電極をもつ基板上で直接シリコンナノワイヤを結晶成長させて作 製した機械共振器の例[33]。(右)基板上にナノワイヤをランダムに分散させ、その後電 子ビームリソグラフィで構造を作製し犠牲層を除去するという手法で作製された機械 共振器の例[36]。 次に、犠牲層としてレジストを塗布した基板上に、別の基板で結晶成長させたナノワイヤ をランダムに分散させ、その両端位置をねらって電子ビームリソグラフィで電極を作製す るという手法[36, 37, 38]もよく用いられている。例えばJ. P. Mathewらのグループはこ のような手法で図3.2右に示すようなナノワイヤの架橋構造型の機械共振器を作製し、そ の機械共振の測定を行った。この手法では、選択した1本のナノワイヤ両端位置のみに電 極が形成できるため、上記の結晶成長を用いた手法における問題は生じない。しかしなが ら基板上におけるナノワイヤの位置はランダムなため、トップダウン法と同様に基板に 対して垂直な方向の構造形成は難しい。またカーボンナノチューブ( CNT )を用いた機 械構造を作製する場合、ナノワイヤを分散させる代わりに基板上で直接 CNTを成長させ
3.1 先行研究 23 た後に電子ビームリソグラフィで電極を作製するという類似した手法が用いられている [39, 40]が、こちらも基板に対して垂直な方向の構造形成が難しいという問題を抱えてい る。 最後に、結晶成長させたナノワイヤを特殊なツールを用いて素子用の別基板に転写す るという手法を紹介する。このツールには、例えば図3.3左のようなインジウムを用いた チップ、図3.3 右上のようなタングステンのプローブ、図3.3 右下のようなPDMSを用 いたスタンプが挙げられる。ここで挙げた例では機械共振器を直接作製したわけではない が、このような手法を用いれば基板上のおおよそ狙った位置にナノワイヤを転写すること は可能と考えられる。ただしいずれの手法も各種ツールが直接ナノワイヤに触れる機会が 多く、その際に外からナノワイヤに必要以上の力を加えてしまうことによるナノワイヤの 破損や特性の変化が懸念される。 図3.3 (左)インジウムのチップを用いたナノワイヤの転写手法[41]。(右上)タングス テンのプローブを用いたナノワイヤの転写手法[42]。(右下) PDMSスタンプを用いた ナノワイヤの転写手法[43]。 このようにナノワイヤを用いた機械素子の作製手法については多方面からの試みがなさ れ、進歩を遂げてきた。しかしながらいずれの手法においても、特にナノワイヤの配置に おける位置制御性は発展途上と言わざるを得ない。電極とナノワイヤの位置制御性を大き く改善することができれば、例えばナノワイヤとゲート電極の距離をギリギリまで近づけ ることでより小さな電圧でナノワイヤの振動を駆動することができるなどのデバイス特性 の向上が期待され、またより複雑な構造の素子を作製することも可能になってくる。この ような視点から、本研究では液滴を用いたナノワイヤの架橋構造素子の作製手法を新たに 開拓し、サブミクロン程度に近接させたゲート電極を持つ機械共振器の実現を目指した。
3.2
バックゲート電極つきナノワイヤ機械共振器
3.2.1
素子の概要
まず、本研究で最初に作製を試みたバックゲート電極つきナノワイヤ機械共振器の模式 図を図3.4に示す。 図3.4 バックゲート電極つきナノワイヤ機械共振器 基板に溝があり、その内部にゲート電極が存在する。溝の上には半導体ナノワイヤが橋 のように架橋されている。ナノワイヤの両端は電極で固定されており、機械振動の際の固 定端の役割を果たすと同時に、電気伝導におけるソースドレイン電極としての役割も担っ ている。すなわち、このナノワイヤは機械共振器であると同時に、電界効果トランジスタ (FET)としても動作する。ナノワイヤ直下のゲート電極にAC電圧を印加することでナ ノワイヤの振動を励起することができ、またDC電圧を印加することによってナノワイヤ の共振特性や伝導特性( FET特性)を変調することが可能である。3.2.2
素子の材料
今回この素子にはInAsナノワイヤを用いた。InAsは一般には閃亜鉛鉱型の結晶構造 をとる直接遷移の III-V 族半導体であるが、ナノワイヤの成長においてはウルツ鉱型の 結晶構造を示すことが多い[13]。基本的な半導体特性としてはバンドギャップがおよそ 0.36 eV ( 300 K )と小さく、電子の有効質量も小さく、移動度が他の III-V族半導体と比 べて非常に大きいことが特徴である。このことから現在主流のSiに替わる、より低消費 電力のMOSFETへの応用が期待されている。 また、InAsは電荷が表面近傍に集中しているという大きな特徴がある。図3.5 は直径 100 nmのInAsナノワイヤのキャリア電子がどのように分布しているかシミュレーショ3.2 バックゲート電極つきナノワイヤ機械共振器 25 図3.5 直径100 nmのInAsナノワイヤにおける電子密度分布n(r)と電場の大きさの 分布ϵ(r)のシミュレーション結果[44]。表面近傍に電子が集中していることが分かる。 ンを行った結果である。横軸はナノワイヤの中心軸からの距離を表している。 InAsでは フェルミ準位が伝導帯でピン留めされることにより表面近傍で伝導帯が曲がり、図3.5の ようにナノワイヤの表面近傍にキャリア電子が集中する。その結果、ナノワイヤの表面側 に筒状の二次元電子ガス面が形成される。このピン留め効果によってInAsは金属と接触 させた際にオーミックコンタクトがとりやすい。またこの性質からInAsナノワイヤは形 状が細くなっても電流が流れやすいという利点があり、ナノワイヤの微細化に際して電気 伝導特性の悪化の心配が少ない。今回は特に作製したデバイスの振動をコンダクタンスの 変化から確認することが重要であったため、このような観点からナノワイヤの材料として InAsを採用した。
3.2.3
作製の手順
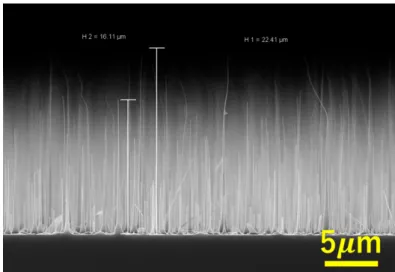
ナノワイヤ溶液の作製 まず、素子として使用するナノワイヤを準備する。本研究で使用したInAsナノワイヤ は、NTT物性科学基礎研究所の舘野功太氏に作製して頂いた。ナノワイヤの成長は減圧 横型のMOCVD装置においてアンドープのGaAs(111)B基板上に直径10 nmの金コロイ ド溶液を塗布し、金微粒子を触媒としたVLS成長法で行った。成長条件は • 全圧 76 Torr • 全水素流量 約2.5 SLM• TMIn (trimethyl indium) 3.78 µmol/min. • TBAs (tertiary butyl arsine) 31.3 µmol/min. • TBCl (tertiary butyl chloride) 12.0 µmol/min. • V/III ratio = 8.3 • 成長温度365℃、成長時間30分 である。図3.6のようにナノワイヤが基板上に成長できている。ワイヤの長さは5 µm∼ 20 µm 程度であり、直径は100 nm∼400 nm程度である。次に、この結晶成長させたナ 図3.6 結晶成長させたInAsナノワイヤのSEM画像 ノワイヤをブチルカルビトール液中で基板上から分離させ、ナノワイヤを含む溶液を作 る。最初はナノワイヤを超音波処理によって基板から分離させる当研究室の従来の手法を 用いていたが、この手法では素子として用いるために十分な長さのワイヤを得ることがで きなかった。これは超音波がナノワイヤを根元から分離させるだけでなく、ナノワイヤ本 体も細かく砕いてしまっているためだと考えられる。そこで図3.7のように超音波を用い ず、市販の筆で基板からナノワイヤを払い落とすことで分離させる手法を用いた。この手 法の方が、より長いナノワイヤを得ることができる。ナノワイヤ溶液の濃度が大きすぎる とナノワイヤが図3.8のように密集してしまうので、予めブチルカルビトールの量をやや 多めにしてナノワイヤ濃度の低い溶液を作っている。ただし濃度が低すぎるときはナノワ イヤが滴下した液滴中にほとんど含まれないことになるので、その場合は溶液の入った小 ビンの真空引きにより溶媒を揮発させることで濃度を大きくし、適切なナノワイヤ濃度に なるように調整している。なお、今回ブチルカルビトールを溶媒として用いた理由は、揮 発するまでにかかる時間がこの作製手法にもっとも適していたためである。
3.2 バックゲート電極つきナノワイヤ機械共振器 27 図3.7 ナノワイヤ溶液の作製方法。ナノワイヤを成長させた基板の表面を筆で払うこ とにより、ナノワイヤを根元から分離させる。 図3.8 濃度が高く、溶液滴下時にナノワイヤが密集した場合の写真。 溝とバックゲート電極の作製 基板は絶縁性のSi基板を用いた。表面は1000 nmの深さまで酸化層( SiO2)が形成さ
れているが、この層は RIE ( Reactive Ion Etching )によって垂直方向にのみ容易に削る
ことができる。まず最初の工程ではナノワイヤを架橋させる溝構造を基板上に作製する。 フォトレジストS1813をコーティングした後、溝パターンをマスクレス露光機を用いて 露光し、現像することで溝以外の部分にのみ S1813のマスクがかかった状態にする。次 にRIE装置を用いてCHF3ガスでドライエッチングを行うことで露出部分のSiO2層を削 り、幅10 µm、深さ350 nmの溝を作製する(図3.9左)。なお今回のRIE装置のレシピ ではSiO2 層を削るレートはほぼ20 nm/minであったためエッチング時間は17分30秒で
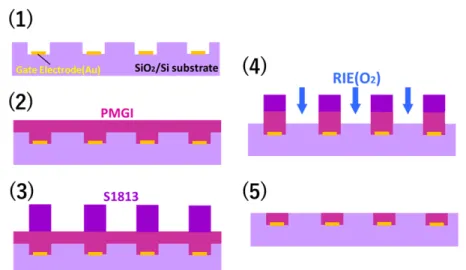
あった。溝を作成した後は基板を 50℃ のアセトン中に30分浸し、さらに仕上げとして オゾンクリーニング( 100℃、60分)を行うことで表面のS1813を完全に除去する。 図3.9 溝とゲート電極を作製する工程(基板を真横から見た図)。 次に溝の底にバックゲート電極を作製する。金属薄膜のリフトオフにおいてS1813よ りバリが出にくいとされる ip3650というフォトレジストを用いて露光、現像によりバッ クゲート電極のパターンを作製し、接着をよくするためのTiを10 nm厚、電極の本体で あるAuを40 nm厚 蒸着する。最後に50℃ のアセトン中に30分浸し、その後アセトン をスプレーすることによって余分なip3650とメタルをリフトオフする。(図3.9右) PMGI犠牲層の作製 次の工程では、ナノワイヤを架橋させるために必要な犠牲層の作製を行う。具体的に は、PMGIというレジストを用いて前工程で作成した溝を埋め、ナノワイヤを転写する際 にナノワイヤがたわんで溝の底に接触してしまうことを防ぐことを目的としている [45]。 この PMGIというレジストは高温でベークすることでアセトンに溶けにくくなるという 特徴があり、この先のプロセスで再び行うリフトオフの際にも除去されず、犠牲層として の役割を維持できるという理由から採用した。 はじめにPMGIを基板全体にコーティングし200℃ で30分ベークした後(図3.10-(2))、 その上からフォトレジスト S1813を重ねてコーティングする。次に溝を作成したときと は反対に溝の部分のS1813が残るようにフォトリソグラフィを行う(図3.10-(3))。さら に RIE 装置を用いて O2 ガスでドライエッチングを行い PMGI レジストを垂直方向に 削っていくと、 S1813層の存在によって先に溝以外の部分のPMGIが完全に除去される ことになる(図3.10-(4))。このドライエッチングではS1813の層も削られるが、PMGI の層よりも十分に厚いため先に無くなることはない。溝のない部分の基板表面の PMGI を完全に除去した後、一度アセトンに軽く浸し (常温、5分で十分)、S1813の層を除去 する。その後、段差計で適宜溝上のPMGIの高さを測定しながらO2ドライエッチングで PMGIを削り、最終的に溝上のPMGI の高さが基板表面と一致するように調整する(図 3.10-(5))。
3.2 バックゲート電極つきナノワイヤ機械共振器 29
図3.10 PMGIによる犠牲層の作製工程(基板を真横から見た図)。(1)工程前の基板の 状態。(2)基板全体へのPMGI の塗布。(3)溝上にのみS1813の層が形成された状態。
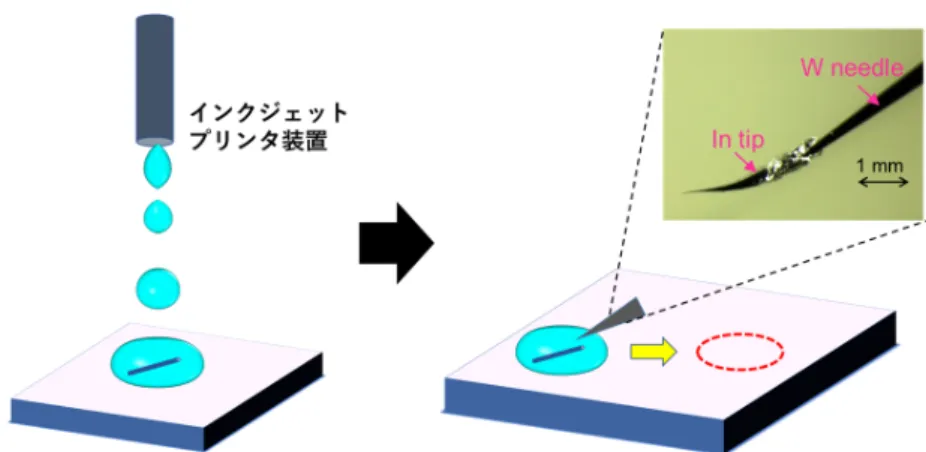
(4) RIEによる基板表面のPMGI層の除去。(5)溝の内部がPMGIで埋まり、PMGIの 高さが基板表面と一致している状態。 ナノワイヤの基板上への転写 この工程ではナノワイヤの基板上への転写を行う。最初の工程で作製したナノワイヤを 含むブチルカルビトール溶液をSIJテクノロジ社製のインクジェットプリンタを用いて微 少量だけ基板上に滴下する(図3.11左)。滴下は光学顕微鏡で観察しながら行い、ナノワ イヤが含まれた液滴が滴下されたことが確認できたらInマニピュレータを用いてナノワ イヤを液滴ごとターゲットである溝の位置に移動させ、溝に対してナノワイヤが垂直にな るように配置する(図3.11右)。ブチルカルビトールは少しずつ揮発していき、ナノワイ ヤに対して液の量が非常に少なくなった状態では、より細かな位置調節が可能である。ナ ノワイヤを所望の位置に移動させたら液滴がすべて蒸発するまで放置し、その後、基板を 180℃で2分間ベークしナノワイヤの位置を固定させる。このベーク処理をしておくこと によりナノワイヤは基板に強く固定され、その後の工程でスピンコートによるレジストの 塗布や窒素ブローを行うことが可能になる。
図3.11 液滴を用いた基板上へのナノワイヤの配置。(左)滴下時の様子を示した図。 (右)ナノワイヤを液滴と共に赤い点線で印した目的地へ動かす様子を示した図。液滴 の移動にはInマニピュレータ(タングステン製の針の先端を180℃ に加熱したIn中 に入れ、静かに引き上げたもの)を用いている。 ソースドレイン電極の作製 この工程ではナノワイヤの両端に電極をつけ、導通をとると同時にナノワイヤを完全に 固定する。まずフォトレジストip3650を基板全体にコーティングした後、フォトリソグ ラフィでナノワイヤ両端の電極部分のip3650を除去する。この段階で電極部分のナノワ イヤ表面の酸化膜を取り除くため、硫化アンモニウム中で 20秒程度軽く濯ぐ[46]。ナノ ワイヤ表面に酸化膜が残っていると電極蒸着時に接触面での電気抵抗が高くなってしま い、良好なオーミックコンタクトがとれなくなってしまう恐れがあるからである。硫化ア ンモニウム処理の後、サンプルを速やかに蒸着装置に入れ、Tiを10 nm厚、Auを200 nm 厚 蒸着する。蒸着後、リフトオフ( 50℃のアセトン中に10分程度浸し、その後アセトン をスプレーする)を行うことでip3650とその上に蒸着された余分なメタルを除去する。 オゾンクリーニングによる犠牲層の除去 最後にオゾンクリーニングを180 ℃の環境で 20分程度行うことで、溝を埋めている PMGI の犠牲層を除去する(図3.12)。オゾンクリーニングはドライな処理であるため、 液体の表面張力の影響が懸念されるウェットな処理での犠牲層除去の場合と比較して、よ り確実な架橋構造の形成が期待できる。溝上にPMGIが残っているかどうかは光学顕微 鏡で観察することでおおよその判別ができるので、オゾンクリーニング後にまだ残ってい るようであればPMGIが完全に除去されるまで追加のオゾンクリーニングを行えばよい。 今回デバイスを作製するにあたり、どれほど高温・長時間でオゾンクリーニングして もPMGIを完全に除去しきれないという現象が時折見受けられることがあった。これは
3.2 バックゲート電極つきナノワイヤ機械共振器 31 図3.12 オゾンクリーニングによるPMGIの除去(基板を真横から見た図) PMGIのコーティングの際のベークにおいて PMGIがオゾンクリーニングでも除去不可 能なほど固まってしまったためと考えられる。この現象が生じる温度に明確な基準はな く、200℃以上のベーク条件ではオゾンクリーニングによってPMGIが除去できる確率は 約7割であった。ベーク温度を下げることでこのリスクを減少させることができると考え られるが、その場合PMGIのアセトンへ耐性が弱くなり、途中のリフトオフの過程で犠牲 層が形状を保てなくなるというリスクが増加してしまう。より確実なデバイス作製のため には、今後この工程を改善する必要がある。
3.2.4
完成した機械共振器
完成した共振器のSEM写真が図3.13である。ゲート電極の存在する幅10 µmの溝上 にナノワイヤが綺麗に架橋されていることが分かる。今回ナノワイヤとゲート電極間の距 離は300 nmに設計しているが、同様の手法でこの距離をさらに詰めることも可能と考え られる。(実際に、次に作製した共振器では250 nmとなっている) 図3.13 完成したバックゲート電極つきナノワイヤ共振器のSEM画像3.3
直交ゲートナノワイヤ共振器
3.3.1
素子の概要
本研究の作製手法における独自性は、液滴を用いることによりナノワイヤの高精度な位 置制御が可能となる点である。しかしながら前項で作製したバックゲート電極のみのナノ ワイヤ機械共振器は、異なる作製手法でも実現例がすでに報告されている。そこで本研究 の作製手法の特色を活かし、これまでに報告の無い直交ゲートナノワイヤ機械共振器の作 製を試みた。その模式図を図3.14に示す。 図3.14 直交ゲートナノワイヤ機械共振器の模式図 この機械共振器ではナノワイヤ直下のバックゲート電極に加え、その側面にサイドゲー ト電極も有している。この2つの直交する電極を用いることで、ナノワイヤにおける2方 向の振動モードを個別に制御することが可能となる。すでに述べたようにナノワイヤは直 交する2つの振動モードを持つが、昨今このような異なる2モードの相互作用を利用した 研究が広く行われており、センサー応用や振動モード転送による振動の高速制御などの技 術が提案されている。これまでの報告例ではこのような2つのモードを有する構造とし て、結合した2つの両持ち梁を用いる例が報告されているが、直交するゲート電極を用い てナノワイヤの2つのモードを個別に制御した研究は未だ報告されていない。その理由 は、直交ゲート構造を実現するための作製手法が確立されていないからである。本研究で 用いた液滴を用いた架橋構造作製手法は、このような新しいナノワイヤ素子技術を開発す るうえでの大きなブレークスルーになることが期待される。その一例として、今回直交す る2つのゲート電極を有する、ナノワイヤを用いた架橋構造型の機械共振器の作製を試 みた。3.3 直交ゲートナノワイヤ共振器 33
3.3.2
素子の材料
今回このデバイスにはInAs/InP がコアシェル構造になっているナノワイヤを用いた。 結晶成長の際に最初にInAsナノワイヤを成長させた後、その外側を覆うようにInPを成 長させたものである。純粋なInAsナノワイヤと比べてオーミックコンタクトを取りづら いと思われる反面、電気伝導を担うInAsの表面を保護できるというメリットがある。後 の章で述べるが、実際にこのデバイスでも良好なオーミックコンタクトを得られたため、 今回特段デメリットは無いと考えることができる。成長はInAsナノワイヤの時と同様に 減圧横型のMOCVD装置において、n-InP(111)B基板上に直径 40 nmの金コロイド溶液 を塗布し金微粒子を触媒とした VLS成長法で行った。詳細な成長条件は以下の通りであ る。 コア( InAs )の成長条件 • 全圧 7.6 Torr • 全水素流量 約2.5 SLM• TMIn (trimethyl indium) 3.6 µmol/min. • TBAs (tertiary butyl arsine) 44.6 µmol/min. • TBCl (tertiary butyl chloride) 20.0 µmol/min.
• 成長温度410℃、成長時間25分
シェル( InP )の成長条件
• 全圧 76 Torr
• 全水素流量 約2.5 SLM
• TMIn (trimethyl indium) 3.78 µmol/min. • TBP (tertiary butyl phosphide) 2.0 mmol/min.
• 成長温度410℃、成長時間30秒
図3.15のようにナノワイヤが基板上に成長できている。ワイヤの長さはInAsの時とほ
図3.15 結晶成長させたInAs/InPコアシェル型ナノワイヤのSEM画像
3.3.3
作製の手順
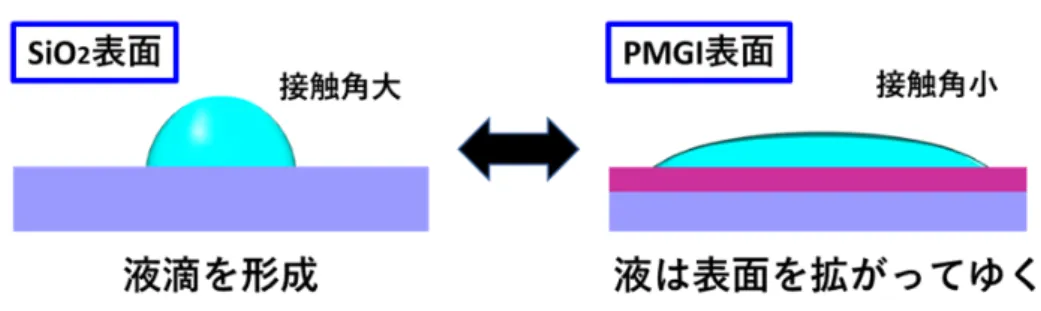
基本的な工程の流れは前項で説明したバックゲート電極のみのナノワイヤ機械共振器と 同じである。ここでは共通する部分の説明は省略し、新たに付け加えたプロセスについて 詳しく説明を行うこととする。 壁構造の作製 バックゲート電極のみの素子作製時の工程ではCHF3 ガスによるドライエッチングで 溝の作製のみを行ったが、今回はサイドゲート電極をとりつけるために図3.16 左に示し た3つの異なる高さの領域を有する構造を作製する必要がある。そのためパターン描画と SiO2 層のドライエッチングを二度繰り返し、基準面並びに溝部分の二つの異なる深さの 領域を形成した。またサイドゲート電極の間隔をサブミクロン程度にまで近接させるた め、フォトリソグラフィではなくより精度の高い電子ビームによるリソグラフィを行っ た。図3.16 右の壁と基準面の間には高さ300 nmの段差が形成されている。詳細は後述 するが、この段差はナノワイヤの水平方向(図3.16 右の上下方向)の位置を固定するた めの「壁」の役割を果たすことになる。二度のドライエッチングにより図3.16 の構造を 作製した後、単一電極のナノワイヤ架橋構造素子の場合と同様の工程により、黄色破線で 示した領域にバックゲート電極を蒸着した。3.3 直交ゲートナノワイヤ共振器 35 図3.16 (左)壁構造を模式的に示した図。(右)この基板を真上から見た図。壁の部分 は全くエッチングを行わない元の基板表面の領域である。基準面は基板全体を広範囲 に300 nmの深さだけ削った領域であり、ナノワイヤの高さ位置の基準となる。また基 準面からさらに300 nm削った領域が溝の役割を果たし、その内部にはバックゲート電 極を作製する。 ナノワイヤの基板上への転写と正確な位置制御 次にナノワイヤの転写を行う。ナノワイヤを含む溶液を滴下し、その液滴中のナノワイ ヤをマニピュレータを用いて液滴ごと移動させるという基本的な手順は同じである。ただ し、今回は作製した壁を活かしてサイドゲート電極に対するナノワイヤの位置決めを精密 に行うため、図3.17に示したように「壁」の切れ目を抜けて溝の上に流れ出る方向に液滴 を動かす。するとブチルカルビトールの液滴は犠牲層として用いているレジストのPMGI の領域に触れたとき、その方向へ強く引き寄せられていく。これは図3.18 のようにブチ ルカルビトールはSiO2 表面とPMGI表面で濡れ性が異なるためである。 図3.17 壁の存在によるナノワイヤの正確な配置手法を示した模式図
図3.18 ブチルカルビトールのSiO2表面とPMGI表面に対する濡れ性の違い ブチルカルビトールの液滴と同時に液滴中のナノワイヤも下方向へ引っ張られるように 動いて行くが、予め作製した壁がちょうどナノワイヤの動きを阻み、その結果ナノワイヤ が溝に対して正確な垂直位置に配置される。このときナノワイヤは壁にピッタリと寄って いるため、その下端の位置は図3.19 で示したように作製した壁の位置とほとんど一致し ていると言える。これはすなわちナノワイヤの配置において非常に高い位置精度の達成を 意味し、光学顕微鏡などを用いて観察することなくナノワイヤの位置を確定させることが できるため、サイドゲート電極との間隔を精密に制御することが可能となる。 図3.19 3.17を真上から見た図。液滴に引っ張られたナノワイヤが壁でせき止められ、 高い位置精度を実現している。 サイドゲート電極の作製 次に、図3.19で示した位置にサイドゲート電極を作製する。これはナノワイヤ両端に ソースドレイン電極を作製するプロセスと同時に行う。すなわちサイドゲート電極は厚さ 10 nmのTiと厚さ200 nmのAuで構成されている。ナノワイヤの下端とサイドゲート電 極の蒸着開始面の高さは全く同じであり、また一般にナノワイヤの直径は200 nm程度で
3.4 ナノワイヤ転写工程の効率化 37 あることから、作製したサイドゲート電極はナノワイヤに対してほとんど真横から電場を 与えることができると考えられる。
3.3.4
完成した機械共振器
完成した機械共振器のSEM写真を図 3.20に示す。バックゲート電極が形成された幅 4 µmの溝上にナノワイヤが架橋されている。また期待通り設計した壁構造にナノワイヤ をピッタリと寄せることに成功しており、ナノワイヤからおよそ600∼700 nm程度離れ た場所にサイドゲート電極が形成できていることが分かる。 この結果より、壁構造に液 滴を用いてナノワイヤを寄せることで基板上の二次元方向の非常に高い位置制御性を達成 できたと考えられ、今後は600∼700 nmよりさらに近傍、具体的には従来手法では困難 であった100 nm 程度離れた位置にサイドゲート電極を作製することも期待できる。なお 図3.20のSEM写真の共振器はナノワイヤの両端にそれぞれ電極が2つずつ作製されて おり、4端子測定ができるように設計してある。これは将来的に伝導特性のより詳細な測 定を行うことも想定しての試みだったが、外側の端子は接触不良のため電極として用いる ことができなかったため、今回は事実上内側の2端子のみの共振器として測定を行った。 図3.20 完成した直交ゲートナノワイヤ機械共振器のSEM画像3.4
ナノワイヤ転写工程の効率化
この作製手法の最大の欠点は、おそらく紹介した他の手法と比べて、一つの素子を作製 するのにより多くの時間を要することである。特に適切な濃度のナノワイヤ溶液を準備で きるかは転写プロセスに要する時間を大きく左右するが、ナノワイヤは液中で均一に存在 しているわけではなくどうしても偏りが生じ、また実際に滴下する液の量は非常に少量であるため溶液滴下時に液滴に含まれるナノワイヤの量を常に一定に保つことは非常に困難 である。濃度調整によってその精度をざっくりと向上させることはできるが、より短時間 で素子を作製するための改善が必要であった。そこで、ここでも図 3.18のようなブチル カルビトールのSiO2 表面と PMGI表面上での濡れ性の違いに着目し、図3.21 のように 基板上にPMGIによるパターンを作製することを考えた。 図3.21 意図的にPMGI層をパターニングした基板表面(基板を真上から見た図)。黄 色の丸で示した場所に最終的に1つの素子となる構造がそれぞれ存在する。 図3.22 基板表面( SiO2)とPMGI上での液滴の振る舞いの違いを示した図 具体的には、基板の隅の方の素子が存在しない場所にPMGIの領域を作っておく。これ は犠牲層作製プロセスの図3.10の時に、溝上の部分だけでなく同時に基板隅にもS1813 のパターンを作製することで PMGIの層が基板表面に残るようにしているので二度手間 にはならない。ここで微小量ではあるが、従来の手法で滴下していたものと比べると遥か に多量のナノワイヤを含んだブチルカルビトール液を滴下する。滴下先がSiO2 の場合は 図3.22のようにブチルカルビトールが綺麗な液滴を形成するためナノワイヤが密集して
3.4 ナノワイヤ転写工程の効率化 39 しまうが、PMGIの場合は滴下されたブチルカルビトールが液滴を形成せずにPMGIの 表面を拡がっていくため、そこに含まれているナノワイヤも液と共に拡がってゆく。この ため、もしナノワイヤの濃度が高い場合はナノワイヤ同士が密集してしまい単一ナノワイ ヤの分離が困難になる、という問題を防ぐことができ、逆にナノワイヤの濃度が低い場合 は十分多量の溶液を滴下することで液滴中にナノワイヤが存在しない確率を大幅に減らす ことができる。PMGI上を流れてゆくナノワイヤはマニピュレータでその動きを誘導す ることができ、所望の 1本に狙いをつけたら周囲のブチルカルビトール液と共にPMGI の存在しないSiO2 の領域へ掻き出してやる。するとその場でナノワイヤ1本のみを含む 液滴が形成される。このPMGIのパターンを血管のように基板上に張り巡らせることで、 素子の近くまでナノワイヤをたやすく運ぶことができる。この工夫によりナノワイヤの転 写にかかる時間を1/3以下に削減することに成功した。
![図 1.3 機械共振器における体積と Q 値の関係 [12] 。 構造を作製する。半導体ナノワイヤは、このようなボトムアップ法によって作製されるナ ノ構造の代表例であり、昨今、次世代の光デバイスやトランジスタへの応用が広く研究開 発されている。ボトムアップ法で作製されたナノワイヤはエッチングプロセスとは無関係 に構造が形成されるため、その表面はダメージのない状態を保つことが可能であり、微細 化しても高いQ値を維持する優れた機械共振器を実現することが期待される。 このナノワイヤのデバイス技術では、成長したナ](https://thumb-ap.123doks.com/thumbv2/123deta/5888912.1047718/9.892.292.631.173.522/ボトムアップトランジスタボトムアップエッチングプロセス.webp)
![図 3.1 ( 左 ) ねじれ方向の運動も利用したパドル型共振器 [28] 。 ( 右 ) ねじれ方向の運動 を利用し高感度な電荷検出を実現したパドル型機械共振器 [3] その位置を厳密に決めることは困難である。この方法を用いるときは触媒となる金属粒子 を複数撒くことが多く、図 3.2 左の赤い丸で示したように所望の場所以外にナノワイヤが 成長し素子の動作の妨げとなる可能性もある。 図 3.2 ( 左 ) 対となる電極をもつ基板上で直接シリコンナノワイヤを結晶成長させて作 製した機械共振器の例 [33] 。](https://thumb-ap.123doks.com/thumbv2/123deta/5888912.1047718/27.892.226.699.167.358/ねじれパドルねじれパドル決めるナノワイヤシリコンナノワイヤ.webp)