要旨
本研究では,足底部での硬度弁別課題により,立位時の姿勢動揺量が減少する かについて検証した.
近年,足底部での硬度弁別課題を10日間実施すると,脳卒中患者や高齢者のみ ならず若年者においても,立位時の姿勢動揺量が減少するという報告がいくつか なされている(Morioka & Yagi, 2003, 2004 ; Morioka et al., 2009, 2011 ; Nakano et al.,
2011).硬度弁別課題とは,硬度の異なる5種類のマットを踏み,その硬さを記憶・
弁別する課題である.具体的には,1日あたり,硬さの記憶を促す課題を10~15 回と,その弁別する能力を評価する弁別精度テストを10回行った.その結果,硬 さを弁別する能力は経日的に向上し,さらに,10日の介入後には,立位時の姿勢 動揺量が減少することを明らかにした.先行研究の著者らは,足底部での硬度弁 別精度の向上により,立位時の身体と環境の相互作用が改善し,結果として姿勢 動揺量が減少した可能性があると考察している.
しかしながら,立位姿勢に直接寄与する足底部の情報は,圧分布に関する空間 情報であり,なぜ硬さを弁別する行為が姿勢制御に関連するのかについては,現 状では理論的根拠が乏しい.そこで本研究では,硬度弁別課題がもたらす効果に ついて理論的根拠を見出すことを目的とした実験を行うこととした.先行知見で は介入期間を10日と比較的長期に設定しており,1日の介入試行数はたったの20
~25回のみであった.こうしたデザインの場合,介入期間の中で実際に課題に取 り組む時間は,1日につきわずか10分程度と予想され,それ以外の時間の過ごし 方といった交絡因子が結果に影響する懸念がある.そこで本研究では,こうした 影響を排除する目的で,介入期間を短縮し,短期間で先行研究成果を再現するた めに1日当たりの課題試行数を増やした方法を用いて,介入である硬度弁別課題 の有効性を明らかにすることを目指した.
理論検証という観点から,立位姿勢バランスについて先行研究で評価している 姿勢動揺量の大きさ(総軌跡長,外周面積)に加えて,姿勢制御方略(平均パワ ー周波数)にも着眼した.もし,介入が姿勢動揺量の減少に寄与するとすれば,
その背景には,足底部の感度向上により姿勢制御方略が,それまでよりも素早く
別精度テスト正答数と立位姿勢バランスの各項目の相関係数を算出することで検 証した.
まず実験1では,先行研究と介入の総試行数を揃えたうえで(100試行)介入 期間を2日間とし,同様の効果が得られるかを検証した.その結果,硬度弁別精 度の向上は示されたものの,姿勢動揺量の減少や素早い姿勢制御方略への移行を 示唆する平均パワー周波数の増加は認められなかった.さらに,硬度弁別精度と 立位姿勢バランスの関連性も確認できなかった.以上の結果から,介入の量を揃 えることで硬度弁別精度自体の向上の可能性は示されたものの,立位姿勢制御へ の有効性は認められないことがわかった.
実験1で姿勢動揺量が減少しなかった理由について,単に介入期間を10日から 2日に変更したことが問題だったのではなく,それ以外の条件設定に問題があっ たと考えた.例えば,課題間の歩行移動や,スポンジマットに立ち上がる動作,
硬度弁別を立位姿勢で行うことなどは,足底部へ他刺激を混入させうる.また,
弁別する課題では,硬度が分かったタイミングで解答を要求しており,参加者に よっては瞬時に解答することで,探索時間が極端に短くなり,探索時間が不足し た可能性がある.
そこで実験2では,実験1において,結果に影響を与える交絡因子‐足底部へ の他刺激や探索時間の不一致‐を排除した課題環境に修正して,介入の即時性効 果を検証した.具体的には,1日で行う実験に切り替え,日をまたぐことの影響 も排除したうえで,足底部に対する他刺激の混入を軽減するために,硬度弁別課 題と立位姿勢バランスの測定を同じ場所で実施できるように設置した.そして,
足底部に対する感覚情報を一定量確保するため,スポンジマットの探索時間踏を 統一した.その結果,実験1と同様に,姿勢動揺量の減少や平均パワー周波数の 増加は認められず,硬度弁別精度と立位姿勢バランスの関連性についても認めら れなかった.
実験1・2の結果において,先行研究で確認されたような介入効果が得られなか った要因の一つとして,ベースラインとして測定した弁別精度テストの正答数が 先行研究と比較すると,高値であったことに着目した(先行研究:5.2問/10問
中,実験1:6.8問/10問中,実験2:7.2問/10問中).つまり,課題が易しかっ
たことから探索の必要性が低く,介入効果が出にくかったと考えた.
そこで実験3では,スポンジマットを2枚に重ねることで硬度弁別課題の難度 を上げ,探索の必要性を高めた条件で介入効果を再検証した.その結果,初回の 弁別精度テストの正答数が低下し(5.7問/10問中),さらに介入によって硬度弁 別精度の向上が示された.こうした結果は,実験3における硬度弁別課題の難度 を上げるための設定が,ある程度うまくいったことを示唆した.しかしながら,
やはり姿勢動揺量の減少や平均パワー周波数の増加は認められず,硬度弁別精度 と立位姿勢バランスの関連性についても認められなかった.この結果から,探索 の必要性を高めることで,顕著に硬度弁別精度が向上することが示されたが,立 位姿勢制御への有効性は認められないことがわかった.
3つの実験で得られた知見から,介入期間を短縮した場合に,足底部での硬度 弁別課題による立位姿勢動揺量の減少は認められないことがわかった.重要な成 果として,硬度弁別課題の成績と姿勢動揺量の間には,関連性ないことがわかっ た.これらのことから,単に硬度弁別精度が向上しさえすれば,それが立位姿勢 制御に良い波及効果をもたらすのではないことを示唆するものであり,この課題 を用いた介入として課題成績以外の点に着目することの必要性を示している.
目次
第1章 緒言... 1
第2章 本研究の理論的および方法論的背景 ... 3
第1節 姿勢制御の定義および感覚情報との関連 ... 3
1.1 立位時の姿勢制御を支える感覚・知覚的調整 ... 3
1.2 感覚情報に基づく立位姿勢制御 ... 3
1.2.1 視覚 ... 4
1.2.2 前庭感覚 ... 4
1.2.3 体性感覚 ... 5
第2節 足底部の機械受容器刺激による立位姿勢バランス安定化 ... 9
第3節 足底部での硬度弁別課題による立位姿勢バランス安定化 ... 11
3.1 硬度弁別課題による両脚立位姿勢動揺量の減少 ... 11
3.2 硬度弁別課題による片脚立位姿勢動揺量の減少 ... 13
第4節 問題の所在および本研究の目的 ... 15
第3章 実験報告 ... 17
第1節 実験1 ... 17
1.1 目的 ... 17
1.2 方法 ... 17
1.2.1 実験参加者 ... 17
1.2.2 実験装置および環境 ... 18
1.2.3 実験課題 ... 19
1.2.4 実験手続き ... 24
1.2.5 分析方法 ... 26
1.3 結果 ... 28
1.3.1 硬度弁別精度 ... 28
1.3.2 立位姿勢バランス ... 30
1.3.3 触覚の空間分解能 ... 34
1.3.4 硬度弁別精度と立位姿勢バランスの相関 ... 35
1.4 考察 ... 38
第2節 実験2 ... 40
2.2 方法 ... 40
2.2.1 実験参加者 ... 40
2.2.2 実験装置および環境 ... 41
2.2.3 実験課題 ... 41
2.2.4 実験手続き ... 44
2.2.5 分析方法 ... 46
2.3 結果 ... 47
2.3.1 硬度弁別精度 ... 47
2.3.2 立位姿勢バランス ... 47
2.3.3 硬度弁別精度と立位姿勢バランスの相関 ... 50
2.4 考察 ... 52
第3節 実験3 ... 54
3.1 目的 ... 54
3.2 方法 ... 54
3.2.1 実験参加者 ... 54
3.2.2 実験装置および環境 ... 55
3.2.3 実験課題 ... 57
3.2.4 実験手続き ... 60
3.2.5 分析方法 ... 62
3.3 結果 ... 63
3.3.1 硬度弁別精度 ... 63
3.3.2 立位姿勢バランス ... 64
3.3.3 硬度弁別精度と立位姿勢バランスの相関 ... 68
3.4 考察... 71
第4章 総合考察 ... 73
引用文献 ... 77
謝辞 ... 81
第1章 緒言
ヒトの立位姿勢は,主として3つの感覚情報(体性感覚,視覚,前庭感覚)に基 づいて調整されている.中でも,地面との接点である足底部からの体性感覚情報 は, 立位姿勢制御に深く関与していると言われている.加齢や疾患による足底部 の感覚鈍麻は転倒原因の一端とみなされていることから,転倒予防やバランス機 能向上を目的とした足底部への様々な介入の試みがなされている.例えば,凹凸 のあるサンダルを履くこと(Palluel E et al., 2008)や,複数の散弾銃の弾を踏むこ と(大久保,1979), マッサージ(Bernard-Demanze et al.,2004)や青竹踏み(亀井,
2006)といった足底部への介入により,立位時の姿勢動揺量が減少すると報告さ れている.これらのアプローチはいずれも,足底部の触圧覚受容器である機械受 容器への刺激を意図したものである.機械受容器は,立位時に足底部に加わる圧 の情報を収集する重要な役割を担っており,刺激を加えることで情報量が増加し,
結果的に立位姿勢バランスの安定をもたらすと考えられている.
こうした研究の1つに,足底部へ刺激を加えることは同じだが,より認知的な 側面にアプローチした介入でも,立位時の姿勢動揺量が減少するという報告がな されている(Morioka & Yagi, 2004 ; Nakano et al., 2011).これらの研究では,介入 として硬度の異なる5種類のマットを踏み,その硬度を記憶・弁別する「硬度弁 別課題」を用いた.具体的には,1日あたり,硬さの記憶を促す課題を10~15回 と,その弁別する能力を評価する弁別精度テストを 10 回行い,2 週間の内の 10 日で実施した.その結果,テストの正答数が経日的に上昇し,硬度弁別精度が向 上したことを示した.さらに,10日の介入前後で評価したバランス機能について は,立位時の姿勢動揺量が減少したこと示した.一方で,硬度弁別課題はせず,
マットを踏むのみであった統制群では,姿勢動揺量の減少は見られなかった.こ れらの結果から,足底部に対して同じ感覚刺激があるにも関わらず,その硬さを 弁別するという認知的な作業を加えることで,立位時のバランス機能が向上する 可能性が示唆された.同様の結果は,同じ研究室から複数報告されており,脳卒 中患者や高齢者においても有効性であると報告された(Morioka & Yagi, 2003 ; Morioka et al., 2009, 2011).
しかしながら,立位時の姿勢制御に直接寄与するのは足底部に加わる圧変化の 情報であり,なぜ硬さを弁別する行為が姿勢制御に関連するのかについては,現
状では理論的根拠が乏しい.特に,先行研究で介入期間を2週間の内の10日と比 較的長期間設け,さらに1日あたりの課題数が10~15回(弁別精度テストを含め
ると20~25試行)と短時間で実施できる点では,介入以外の要因が混在しうるデ
ザインであり,理論的根拠が見えづらかったと考えられる.例えば,運動や心理 状態,環境変化などは交絡因子となりうるが,理論的根拠の検証にあたり課題効 果を確認するには,これらの要因を排除して,短期間で即時的に再現することが 望ましいと考えた.そこで本研究では,足底部での硬度弁別課題による立位姿勢 バランスの安定化について,介入期間を短縮して理論的根拠を検証することとし た.
本研究では,先行研究とほぼ同様の介入として,硬度の異なる5種類のスポン ジマットを踏み,その硬度について記憶・弁別する「硬度弁別課題」を用いて,3 つの観点から課題の有効性を検証する実験を行った.実験1では,介入の効果に とってその介入の量が重要であると考え,先行研究と介入総試行数を揃えたうえ で介入期間を2日間に短縮し,効果を検証した.実験2では,結果に影響を与え うる交絡因子を排除した課題環境に修正して,即時性効果を検証した.実験3で は,探索の必要性を高めるために,課題の難度を上げて効果を検証した.そして,
介入効果を確認するため,先行研究と同様に総軌跡長と外周面積の指標を用いて,
姿勢動揺量が減少するかを検証した.また,介入の効果に対する理論的根拠の可 能性として,姿勢制御方略の変化の可能性に着眼した.姿勢制御方略には,一般 的に素早い調整(周期の短い調整)と緩やかな調整(周期の長い調整)がある.
もし,介入が姿勢動揺量の減少に寄与するとすれば,足底部の感度向上により姿 勢制御方略が素早い調整に変化していくと考えられる.こうした考えの妥当性を 検証するため,測定する指標として平均パワー周波数を算出し,高周波成分が増 加するか検証した.加えて,硬度弁別精度と立位姿勢バランスの各項目の関連性 について,相関分析を行い検証した.
第2章 本研究の理論的および方法論的背景
第 1 節 姿勢制御の定義および感覚情報との関連
1.1 立位時の姿勢制御を支える感覚・知覚的調整
立位姿勢を保持することは,重心の鉛直投射点が支持基底面の範囲内にあるこ とをさす.重心は,身体の質量中心に位置する点と定義される(Shumway-Cook et
al., 2009).支持基底面は,接地している足底面の外縁を結んだ範囲のことを示し,
また,足底面内で荷重をかけられる限界の範囲を,機能的支持基底面と呼ぶこと もある(King et al., 1994).
立位姿勢は,定位と安定性という2つの考え方がある.定位とは,運動課題に 関与する身体内部のコーディネーションや,身体と環境との間の関係を適切に維 持する能力と定義される.安定性とは,バランスや平衡と同義であり,支持基底 面の中に重心を保持する能力のことである.この安定性は,動的平衡と静的平衡 と分けて表現することがある.動的平衡は,歩行のように,支持基底面の形や位 置がダイナミックに変化し,それに伴って重心の位置も変化する状況下で姿勢を 保持することを指す.一方で,静的平衡は,立位姿勢のように支持基底面や重心 が著しく変化しない状況下で姿勢を保持することである.ただし,身体を保持し ているという側面から見ると,静的平衡は,決して「静止していて動かない」と いう意味ではなく,身体と環境との関係を常にモニターし,機械的に揺れること で,動的にバランスを保持していることを理解しておく必要があるといわれてい る(政二,2011).
見かけ上は同じ立位姿勢でも,経時的に変化する身体と環境にあわせて筋出力 や身体位置の調整はされており,すなわち,状況や文脈に応じて自身の動きを柔 軟に制御できるようになっている.身体と環境の継続的な相互作用によって生じ る感覚情報が,姿勢制御において非常に重要な役割を果たしていることが分かる
(樋口,2015).
1.2 感覚情報に基づく立位姿勢制御
ヒトの立位姿勢は,身体の感覚器官から入力される感覚情報(視覚,前庭感覚,
体性感覚)を中枢神経で統合し,制御されている.以下に,それぞれの感覚と立
位姿勢制御の関連について述べる.
1.2.1 視覚
視覚は,見えの変化(網膜に投射される情報の変化)や眼球運動に基づき,外 部環境と身体との距離関係の情報を提供している.視覚の特徴は,情報入力から 身体応答までに要する時間が比較的長いことである.立位姿勢を長く保持できる 安定した場面で微調整をする役割があるが,逆に急激なバランスの変化が生じる 場面では,バランス維持に果たす貢献度は他の感覚情報に比べて高くないと考え られている.
実験的に視覚を操作し,視覚情報が立位姿勢制御に寄与していることを示した 報告を紹介する.代表的な研究の1つに,動く部屋(mooving room)の装置を用 いて行われた実験がある(Lee et al., 1975).この装置は,床は動かさず壁を前後 方向に動かすことによって,部屋の中で立位姿勢を保持している実験参加者の視 覚情報を操作することができる.結果は,壁を実験参加者に近づける操作をする と,身体が自然と後方へ傾き,遠ざける操作をすると身体が自然と前方へ傾いた.
つまり,床は動いていないにもかかわらず,壁の動きによって生じた視覚情報の 変化によって,姿勢動揺量が増加した.この視覚情報の変化は,身体が傾く場合 にも生じるが,壁の動きによって身体が動揺するのは,そこで生じた視覚情報の 変化が,身体の前後方向への傾きを錯覚させ,自動的な姿勢の調整反応を引き出 すからである.
1.2.2 前庭感覚
前庭感覚は,重力や加速度を検知して,身体の位置や動きの情報を提供してい る.前庭感覚の受容器は耳の内耳に存在し,頭部に対する垂直方向の重力および 水平方向の直線加速度を検知する耳石器と,回転加速度を検知する三半規管がそ れぞれ役割を担っており,比較的素早い姿勢制御に寄与している.
前庭感覚と立位姿勢制御の関連を調べる方法に,直流電流刺激(Galvanic Vestibular Stimulation)を用いる方法がある.この方法では,両耳の後ろに電極を つけ,微弱な直流電気の刺激を与えて前庭感覚の興奮を引き起こし,その興奮へ
大きい状況下で,姿勢動揺量を増加させると考えられている.例えば,両眼開眼 と片眼開眼とで直流前庭刺激を与えて,それぞれの立位時の姿勢動揺量を比較す ると,視覚情報が少ない片眼開眼状況で姿勢動揺量が大きくなる(Jessop et al.,
2008).また,床が前後方向に動くような下肢の体性感覚情報が混乱する環境下で
直流前庭刺激を与えると,同様に姿勢動揺量が増加する(Inglis et al., 1995).
実験的に前庭感覚へ刺激を加える方法とは別に,前庭機能を喪失した患者を対 象に,前庭感覚と姿勢制御の関連を検証した研究もされている(Allum et al., 2011).
この研究では,立位姿勢において足関節を背屈する方向に床を傾けたときの姿勢 動揺量を,前庭機能喪失患者と健常者で比較している.その結果,両群ともほぼ 同じタイミングで刺激に対する反応が生じたが,その反応の大きさは前庭機能喪 失患者で極端に大きくなることが明らかになった.すなわち,前庭機能の喪失は,
刺激に対する反応機能は低下していないが,運動反応の大きさを調整する機能の 低下が生じていると考えられる.
1.2.3 体性感覚
体性感覚は,地面との接地面である足底部や,下肢を中心とした全身の筋肉・
関節から,支持基底面内における身体の位置や動き,そして全身の協調関係につ いての情報を提供している.
体性感覚は表在感覚と深部感覚に大別される.表在感覚は触覚,圧覚,痛覚,
温覚などを検知し,情報入力される.これらの感覚情報を集積する受容器は,機 械受容器(mechanorecepter)と呼ばれ,立位時に唯一の支持面である足底部には 多数分布している.立位姿勢の変化に応じて足底の皮膚表面は変形し,その時の 接地面の硬さや形状の情報を機械受容器が検知することで,身体の傾きを正確に モニターし,姿勢制御は実行されている.深部感覚は運動覚,位置覚,重量感覚 などを検知し,情報入力される.筋紡錘や腱受容器,関節受容器などの固有受容 器(proprioceptor)を通じて,情報を獲得している.中でも,前脛骨筋や下腿三頭 筋などの足関節付近に存在する受容器は,筋肉が伸張した情報に基づいて身体の 傾きを検知することで,姿勢制御を行っている.このように,体性感覚の中でも,
表在感覚の受容器は主に支持面の評価をする役割がある一方で,深部感覚の受容 器は足圧中心の変化(身体の傾き)の経時的な制御に貢献している(Maurer et al., 2001).
実験的に足部を阻血・冷却させ,足底部の表在感覚や足関節の関節受容器の情 報を利用しにくい状態を作り出し,下肢の体性感覚と立位姿勢制御の関連を調べ た研究を紹介する.
Diener et al.,(1984)は,足関節部で阻血し,足底部の表在感覚や足関節の関節受 容器の情報が利用しづらい状況下で閉眼立位姿勢保持をすると,ゆっくりとした 周期の動揺が出現することを明らかにした.また,接地面がゆっくりと動揺して いる状況での足関節の阻血は姿勢動揺量を増加させるが,接地面が急激に傾く状 況での足関節の阻血は姿勢動揺量を増加させないことも明らかにした.これらの 結果から,足底や足関節受容器から獲得される体性感覚情報は,比較的ゆっくり とした周期の動揺に対応していると示唆される.
崎田ら(2006)は,足底および下腿をそれぞれ個別に冷却すると,足底冷却時の 方が,立位時の姿勢動揺量および体幹・下肢筋群の筋活動が大きくなると報告し た.これは,足底感覚が正常に入力されている場合には,下腿の体性感覚情報が 効率的に利用しづらい,つまり下腿の筋紡錘機能が低下している状況下でも,足 底感覚を利用して立位時の姿勢制御が可能であることを示す一方で,足底感覚か らの情報入力が低下している場合には,代償として体幹筋群や下腿近位の筋群の 活動を増加させて,姿勢制御を行っていることを示唆する.
下肢の体性感覚と立位姿勢制御の関連を調べる別の方法に,末梢神経障害を有 した患者(以下 DM-NP 者)を対象にした研究もある.糖尿病の代表的な合併症 の 1 つに末梢神経障害があり,足部感覚が鈍麻になる症状がある.Simoneau et
al.,(1994)は,健常者(以下 nonDM 者),末梢神経障害のない糖尿病患者(以下
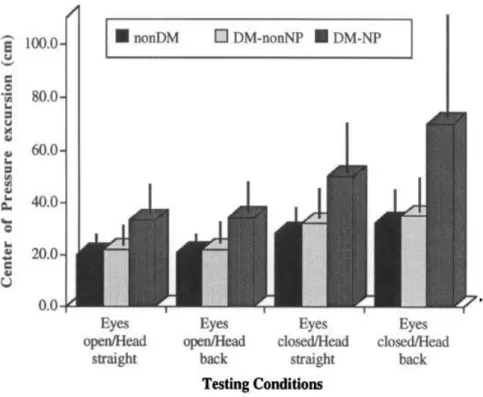
DM-nonNP者),DM-NP患者で,足圧中心の移動距離を比較した.その結果,DM-NP
者において,足圧中心の移動距離が有意に大きくなった(図 2-1-1).この研究で は,視覚情報の操作として開眼・閉眼の2条件,前庭感覚の簡易的な操作として 頭部前向き・頭部上向き‐頸部 45°伸展位の2 条件を組み合わせた 4 条件で比較 しているが,いずれの測定条件でも DM-NP 者で姿勢動揺量が大きいことを示し ている.特に,視覚情報・前庭感覚情報ともに利用しづらい状況で,最も足圧中 心の移動距離が大きくなることから,DM-NP者は他の対象者よりも,視覚・前庭 感覚の情報に依存して姿勢制御していることを示唆している.一方で,DM-nonNP
図2-1-1.糖尿病性末梢神経障害の有無による足圧中心移動距離の違い
(Simoneau et al., 1994)
横軸(測定条件):左から開眼頭部前向き・開眼頭部上向き・閉眼頭部前向き・
閉眼頭部上向き
グラフのバー:左から健常者・末梢神経障害のない糖尿病患者・末梢神経障害の ある糖尿病患者
実験的に足部に,外乱として振動刺激を与える方法を用いた研究も報告されて いる.Kavounoudias et al.,(1998)は足底部の特定領域に振動刺激を加え,その時の 足圧中心の変位と身体の傾斜を観察した.その結果,振動刺激を与えた領域と逆 の方向へ足圧中心を移動させ,さらに,身体は足圧中心が移動した方向へ傾斜す ることを明らかにした(図 2-1-2).例えば,足底前部への振動刺激は姿勢を後傾 させる.これは,前足部への振動刺激は,姿勢が前傾状態にあると錯覚させ,そ の結果,姿勢の後傾という調整反応が生じたと考えられる.ただし,姿勢が後傾 したのは,振動刺激を受けている前足部からは姿勢制御に有用な感覚情報が得ら れないため,接地面からの安定した情報を得るための探索行動として姿勢を後方 へシフトした,という解釈もされている(木藤,2006).
図2-1-2.足底部の刺激領域と足圧中心の移動分布(Kavounoudias et al., 1998)
a.片脚の特定領域への刺激,b.両脚の特定領域への刺激,
c.両脚の前・後足部への刺激,d.刺激なし
a. b.
c. d.
第 2 節 足底部の機械受容器刺激による立位姿勢バランス安定化
足底部の皮膚は,加重することで接地面の形状に適応して変形する.その変形 から,足底の各部分に加わる圧力の分布変化を身体の傾き情報として機械受容器 が検知し,中枢に伝達され,姿勢の状態がモニターされる.したがって,足底部 からの情報は,中枢神経系にとっては,接地面と身体との空間関係を知るのに極 めて重要である.本節では,足底部の機械受容器へ刺激を加えて体性感覚情報を 増加させることで,立位姿勢バランスの安定化をもたらした先行知見を紹介する.
大久保ら(1979)は,床に敷き詰めた散弾銃の弾の上に立つことで,足底部の 機械受容器が賦活すると考え,散弾銃の弾を 3種類の間隔(1cm,1.5cm,2cm)
で敷き詰める条件と,何も敷かない条件で立位姿勢を保持し,その重心動揺を開 眼と閉眼で比較した.その結果,散弾銃の弾の間隔が狭い,すなわち体性感覚情 報が多い状況ほど,開眼と閉眼の重心動揺の差が少ないことがわかった(図2-2-1).
このことは,視覚情報が利用できない状況で立位を保持する場合に,足底部の機 械受容器からの体性感覚情報が,重要な役割を果たすことを裏付けている.
図2-2-1.重心の移動距離(大久保,他 1979)
白丸○:開眼,黒丸●:閉眼
W.0.:散弾銃なし(フラットな状態),W.1:散弾銃の弾の間隔1cm,
W.1.5:散弾銃の弾の間隔1.5cm,W.2:散弾銃の弾の間隔2cm
また,動的な外乱刺激がある場合にも,足底部からの体性感覚情報の増加は,
姿勢の安定性に関連することが報告されている(坂田.1993).この研究では,散 弾銃の弾が1cm間隔と2cm間隔に敷きつめられた足底板の有無で,立位時に動的 な外乱刺激を加えた時の姿勢応答を観察した.その結果,足底板がある条件で立 位姿勢が安定し,また2cm間隔よりも1cm間隔に散弾銃の弾を敷いた足底板の条 件で,外乱刺激からの立ち直り応答時間が短いことを明らかにした.これは,急 激にバランスを崩す場面での姿勢制御には,足底部の触圧覚が関与していること を示唆している.
高齢者においても,足底部の体性感覚情報を増加させて機械受容器を賦活させ ることは,立位姿勢バランスの安定化に寄与することが報告されている.皮膚の 触覚や振動感覚の感受性は加齢にともない低下し,その度合いは下半身で顕著で あるといわれている(Verschueren et al., 2002 ; Kenshalo,1986 ; 崎田,2010 ).この ような背景から,高齢者の転倒予防の一環として,足底部に対する刺激を強める ことで感受性の低下を補い,立位姿勢バランスを改善しようとする試みがされて いる.Palluel E et al., (2008)は,表面に凹凸のある健康サンダルを用いて足底部の 機械受容器への刺激を増加させることで,立位時の姿勢動揺量が減少することを 明らかにした(図 2-2-2).加齢で減衰した足底部の体性感覚は,凹凸のある表面 に触れることで機械受容器が賦活し,それが立位姿勢バランスの安定化をもたら したと考えられる.
図2-2-2.高齢者が凹凸のあるサンダルを履くことで姿勢動揺量が減少した研究
(Palluel E et al., 2008)
第 3 節 足底部での硬度弁別課題による立位姿勢バランス安定化
本節では,本研究で採用する実験課題を用いた先行研究(Morioka & Yagi, 2004 ; Nakano et al., 2011)について,同一研究室から報告された成果の概要をまとめる.
これらの先行知見は,前節で紹介したような機械受容器に対する刺激を意図せず,
刺激に対して注意を向け,刺激の差異を正確に認識できるようになるという,知 覚学習課題を採用している点に特徴がある.具体的には,硬度の異なる5種類の マットを踏み,その硬度を弁別する硬度弁別課題を用いた.比較する群では,同 様にマットを踏み同様の感覚情報を得るが,硬度弁別する課題を行わなかった.
以上の課題を2週間のうち10日で実施し,課題前後で立位姿勢動揺量を評価した.
3.1 硬度弁別課題による両脚立位姿勢動揺量の減少(Morioka & Yagi, 2004)
著者らは,「立位姿勢を制御する際に,足底部の触圧覚や足部の筋感覚に基づい た接地面の硬さや傾きの情報は重要な役割を担っており,こうした情報は単に受 動的に入力されるのではなく,探索的な動作の結果として能動的に入力する側面 を持つ」と考えた.こうした背景から,足底部で探索する知覚学習課題は立位姿 勢制御と関連があると考え,接地面の硬さの差異を弁別する課題を用いて,両脚 立位時の姿勢動揺量を評価する実験を行った.
実験では,健常若年者30名を対象とし,事前に介入群と統制群に割り振り,介 入群では硬度弁別課題を行った.具体的には,実験者が硬度情報を伝えたうえで 探索する硬度記憶と,記憶した情報をもとにクイズ形式で硬度を解答し,それに 対してフィードバックを与える硬度弁別フィードバック(以下硬度弁別 FB)を,
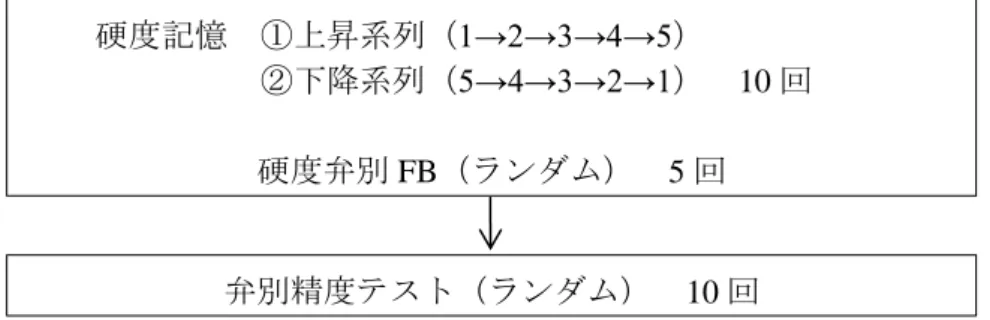
組み合わせて15回行った.その後,その課題効果を確認するクイズ形式の弁別精 度テストを10回行い,誤判断数を硬度弁別精度の評価に用いた(図2-3-1).これ らの課題を2週間の内の10日で実施し,その10日の前後で立位姿勢バランスを 評価した.立位姿勢バランスの評価は,重心動揺から姿勢動揺量の大きさを示す 総軌跡長,外周面積,矩形面積を抽出した.測定は,接地面安定・不安定の2条 件と,開眼・閉眼の2条件を組み合わせた4条件で実施された.
その結果,弁別精度テストの誤判断数は経日的に減少し,硬度弁別精度の向上 を示した(表 2-3-1-a).さらに,介入群の姿勢動揺量は,安定閉眼条件および不 安定条件では視覚条件に関わらず減少を示した(表2-3-1-b).一方で,統制群は,
条件とも,全ての項目で変化は認められなかった.
図2-3-1.介入群の1日の課題の流れ(カッコ内は硬度呈示順)
a.介入群における弁別精度テスト誤判断数(10問中)の経日変化
※数値の減少は硬度弁別精度の向上を意味する
b.介入前後の重心動揺の変化
※数値の減少は姿勢動揺量の減少を意味する 上段(Table2):安定条件,下段(Table3):不安定条件
LNG:総軌跡長,ENV-AREA:外周面積,REC-AREA:矩形面積 硬度記憶 ①上昇系列(1→2→3→4→5)
②下降系列(5→4→3→2→1) 10回
硬度弁別FB(ランダム) 5回
弁別精度テスト(ランダム) 10回
3.2 硬度弁別課題による片脚立位姿勢動揺量の減少(Nakano et al., 2011)
Nakano et al.,(2011)は,Morioka & Yagi, (2004)の報告をもとに,同様の課題を用 いて,臨床応用の期待ができる片脚立位姿勢への効果を検証した.片脚立位は,
患者や高齢者の平衡機能検査として利用され(Michikawa et al., 2009),高齢者の 転倒リスクとの関連も報告されている(Crosbie et al., 1989).こうした背景から,
硬度弁別課題の立位姿勢バランスへの有効性を検証した.
基本的な実験方法は,Morioka & Yagi, (2004)の先行研究を踏襲している.課題 内容について,弁別精度テスト前の課題は硬度弁別FBを10回行い,その後,弁 別精度テストを10回行った(図2-3-2).立位姿勢バランスの評価は,片脚立位姿 勢を保持した際の重心動揺の値で評価し,Morioka & Yagi, (2004)と同一の項目を 抽出した.測定は開眼・閉眼の2条件で実施された.
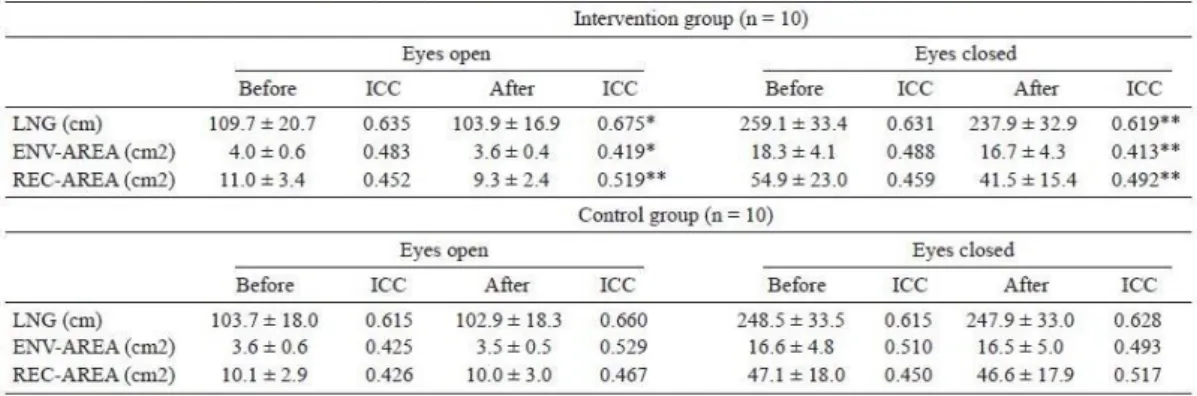
その結果,弁別精度テストの正答数は経日的に上昇し,硬度弁別精度の向上を 示した(表 2-3-2-a).さらに,介入群の姿勢動揺量は,視覚条件に関わらず,全 項目で減少した(表 2-3-2-b).一方で,統制群では,両条件とも,全ての項目で 変化は認められなかった.
図2-3-2.介入群の1日の課題の流れ(カッコ内は硬度呈示順)
a.介入群における弁別精度テストの正答数(10問中)の経日変化
※数値の上昇は硬度弁別精度の向上を意味する
硬度弁別FB ①上昇系列(1→2→3→4→5)
②下降系列(5→4→3→2→1) 10回
弁別精度テスト(ランダム) 10試行
表2-3-2.Nakano et al.,( 2011)の研究成果 b.介入前後の重心動揺の変化
※数値の減少は姿勢動揺量の減少を意味する 上段:介入群,下段:統制群
LNG:総軌跡長,ENV-AREA:外周面積,REC-AREA:矩形面積
表2-3-2.Nakano et al.,(2011)の研究成果
以上2つの結果は,足底部での硬度弁別課題という認知的なアプローチを含む 課題を10日行うことで,立位姿勢動揺量が減少する可能性を示した.これらの成 果について,Morioka & Yagi, (2004)は,足底部での知覚学習課題を通じて,足底 圧位置の正確性や足底部の知覚範囲の改善がもたらされ,姿勢動揺量が減少した のではないかと考察した.特に,注意や意識を介する随意的な姿勢制御-接地面 が不安定な状況,支持基底面が縮小する片脚立位-において,介入効果が認めら れたことは,高次認知機能にアプローチする硬度弁別課題の有効性を支持する結 果であると主張している.
以上2つの先行研究成果は,硬さを弁別するという,直感的には姿勢制御とは 直接関連がないと考えられる課題により姿勢動揺量が減少した,知覚レベルの介 入で運動行動が改善するという点で,新規性が高い.しかしながら,同じ感覚入 力があった統制群は,本当に硬度に注意を向けていなかったか疑問が残る.統制 群では課題を設定していないことから,統制群が硬度の記憶・弁別していた可能 性を否定できない.つまり,介入群では硬度弁別精度と立位姿勢動揺量に関連が
第 4 節 問題の所在および本研究の目的
前節で述べた,足底部での硬度弁別課題により立位姿勢動揺量が減少したとい う成果について,本研究では介入期間の短縮に着目して検証することを目的とし た.
先行知見(Morioka & Yagi, 2004 ; Nakano et al., 2011)において,同じ感覚入力が あったにもかかわらず,硬度弁別課題を行わなかった統制群で姿勢動揺量が減少 しなかったことから,ただマットを踏むだけでは,姿勢制御に影響を与えるよう な機械受容器への刺激としては弱かったことがわかる.つまり,先行研究の成果 については,機械受容器への刺激とは別の経路で立位姿勢制御に影響を与え,結 果的に姿勢動揺量の減少をもたらしたと推察できる.しかしながら,現段階では 具体的に機械受容器の刺激という要因以外に,どのような要因があるのかを説明 する知見に乏しく,介入効果を説明する理論的な根拠が弱い.特に,介入期間を 2週間のうちの10日で実施しており,介入以外の運動や心理状態,環境などの交 絡因子の存在は大いにあると考えられる.つまり,介入後に見られる結果につい て,実は実験以外の時間の活動が影響した可能性を否定することが難しい.これ らの活動の影響を排除するには,介入期間を短縮して,できる限り介入以外の活 動をしている時間を短縮することが必要である.
そこで本研究では,介入期間を短縮したうえで,先行研究成果の再現ができる かについて,3 つの観点で実験を行った.まず,実験 1 では,介入の効果にとっ てその介入の量が重要であると考え,先行研究と介入総試行数を揃えたうえで 2 日間に期間を短縮し,効果を検証した.理論検証の一端として,足底部の触覚空 間分解能についても二点識別覚を用いて評価を行った.実験2では,結果に影響 を与えうる交絡因子を排除した課題環境に修正して,即時性効果を検証した.そ して実験3では,探索の必要性を高めるために課題の難度を上げて,介入効果を 検証した.加えて,接地面の状況によって介入効果が波及しやすいと考え,接地 面が比較的軟らかく不安定な状況下での姿勢制御を検証した.
介入効果の評価は,先行研究と同様に,姿勢動揺量の減少が見られるかについ て,重心動揺の値から算出される総軌跡長と外周面積を抽出した.また,介入効 果に対する理論的根拠の可能性として,姿勢制御方略に着眼した.姿勢制御方略 には,一般的に素早い調整(周期の短い調整)と緩やかな調整(周期の長い調整)
がある.もし,介入が立位姿勢動揺量の減少に寄与するとすれば,足底部の感度 向上により姿勢制御方略が素早い調整に変化していくと考えられる.こうした考 えの妥当性を検証するため,測定する指標として平均パワー周波数を算出し,高 周波成分が増加するかどうかについて検証した.加えて,介入課題に関係なく,
そもそも硬度弁別精度と立位姿勢バランスの各項目に関連性があるかについて,
相関分析を行い検証した.
第3章 実験報告
第 1 節 実験 1
1.1 目的
実験1では,硬度弁別課題による立位姿勢動揺量の減少について,介入の量に 着目し,先行研究と介入総試行数を揃えたうえで,介入効果の検証をすることを 目的とした.実験1の介入は,先行研究成果のように,硬度弁別精度が向上する ことをねらった課題とした(詳細は介入課題を参照).したがって,介入により顕 著に硬度弁別精度が向上するかについて,比較する群においても硬度弁別精度の 評価行い,検証した.介入の量について,Nakano et al.,(2011)の研究では,硬度の 記憶を促す課題を1日10回行い,介入期間を10日としている.すなわち,介入 総試行数は100回(10回×10日)であり,実験1ではこの回数を採用した.なお,
予備的に実施したところ,実験拘束時間や参加者の疲労などの影響により,1 日 で実施するには困難であると判断し,介入期間を連続した2日間のデザインとし た.
1.2 方法
1.2.1 実験参加者
実験参加者は、健常若齢者27名であった.実験開始前にあらかじめランダムに 硬度弁別課題を行う介入群と,他の認知課題を行う二重課題群のいずれかの群に 割り振った.事前に,本研究の課題遂行に支障となるような整形外科的疾患がな いことを確認の上,実験に参加してもらった.実験結果に影響しうる個人特性と して足長と利き足を問診した(詳細は表 3-1-1 に示す).実験参加にあたり,実験 目的・方法・心身への影響・参加中止の自由について説明を行い,実験参加者本 人から実験内容への同意と実験参加への承諾を紙面にて得た.また,本研究の手 続きは,首都大学東京倫理委員会により審査を受け,承認された(承認番号26-69).
介入群(n=13) 二重課題群(n=14)
男/女 (人) 4 / 9 3 / 11
年齢 (歳) 27.7 ± 5.2 25.9 ± 8.5 足長 (cm) 24.3 ± 1.4 24.5 ± 1.5 利き脚 右/左 (人) 13 / 0 13 / 1
表3-1-1.実験1の参加者情報
1.2.2 実験装置および環境
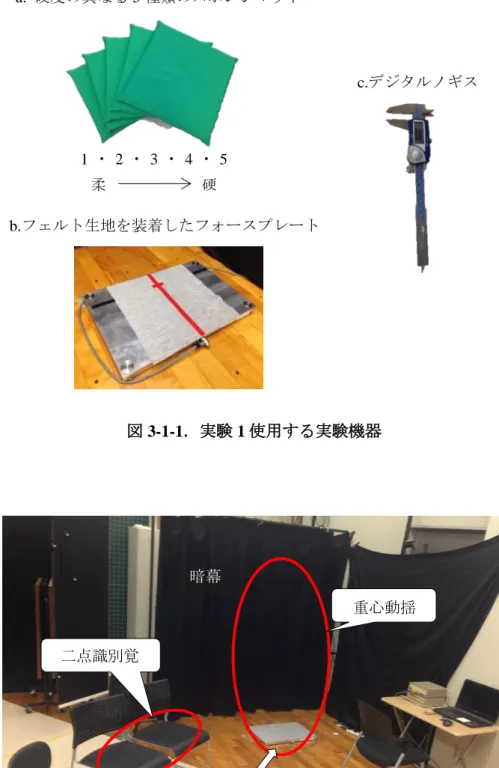
硬度弁別課題および弁別精度テストは,表面素材や形状は同じだが硬度の異な る 5 種類のスポンジマット(イノアック社製)を用いた(図 3-1-1-a).硬度はそ
れぞれ58.8,78.5,107.9,200,308 N/100πcm²であり,柔らかいものから1・2・3・
4・5と番号をふった.スポンジマットの大きさは30cm四方で,4cmの厚みがあ った.
立位姿勢バランスを評価する重心動揺の測定には,アンプ内蔵型フォースプレ ー ト (Kistler 社 製 ,9286A 型 ) を 用 い た . フ ォ ー ス プ レ ー ト の 大き さ は
60cm×60cm×3.5cmであった.フォースプレートに AD変換器を接続し,PCにデ
ータを取り込んだ.データの解析には,ディケイエイチ社製ソフトウェアTRIAS を使用した.データ取り込み時のサンプリング周波数は50Hz,計測時間は 30秒 に設定した.測定は裸足で行うため,フォースプレートの表面温度が測定値に影 響しないように,表面にフェルトの生地を貼着した(図3-1-1-b).
足底部における触覚の空間分解能を評価する二点識別覚の測定には,デジタル ノギス(A&D社製,AD-5764A-150)を用いた(図3-1-1-c).
機器の配置は,図3-1-2に示す通りである.3つの課題間を移動する際に,足底 部からの感覚情報を統制するため,市販のスリッパを着用した.また,実験の様 子は,後方よりデジタルビデオカメラ(Panasonic社製,HC-V300M)にて撮影し,
弁別精度テスト正答数の確認などに用いた.
図3-1-1.実験1使用する実験機器
図3-1-2.実験1機器の配置
c.デジタルノギス
b.フェルト生地を装着したフォースプレート a. 硬度の異なる5種類のスポンジマット
1・ 2・3 ・4 ・5
柔 硬
介入課題,弁別精度テスト 二点識別覚
暗幕
重心動揺
約1.5m
1.2.3 実験課題
以下に,実験の介入課題,介入の効果を確認するための3つの課題(弁別精度 テスト,片脚立位姿勢保持,二点識別覚)について,詳細を記す.
介入課題
先行研究と同様に,硬度の異なる 5種類のスポンジマットを用いて課題を行 った.参加者は,実験者が試行ごとに足元に設置する硬度の異なるスポンジマ ットに立ち上がり,硬度の探索を行った.硬度の探索は,足底部がスポンジマ ットに触れた状態で足関節を底背屈するよう指示し,足底部がスポンジマット から離れる動きや,身体を大きく揺らす動きは制限した.また,課題中は視覚 情報を遮断するため,アイマスクを着用した.課題内容について,弁別精度向 上を目的として,硬度記憶および硬度弁別フィードバック(以下硬度弁別 FB)
を組み合わせて実施した.硬度記憶は,実験者が硬度情報を伝えてからスポン ジマットに立ち上がり,硬度の探索を10秒間行った(図3-1-3-a).硬度弁別FB は,事前に硬度情報がない状態でスポンジマットに立ち上がり,記憶した情報 をもとに硬度の弁別を行い,その番号が分かった時点で解答した(最大10秒).
その解答に対し,正誤のフィードバックを与えた.誤答であった場合,正解の 硬度番号についてもフィードバックした(図3-1-3-b).1日の総試行数は50回 で,硬度記憶15回,硬度弁別FB10回を1セットとし,休憩を挟んで2セット 繰り返した.スポンジマットの硬度の順番は,事前にランダム化した表に基づ いて決定した(疑似ランダム条件).
比較する二重課題群では,同じ手続きでスポンジマットを踏むが,硬度への 注意を阻害する目的で,口頭暗算課題を同時に実施した.口頭暗算課題は,実 験者がランダムな3 桁の数字を提示した後に,参加者はスポンジマットに立ち 上がり,提示された数字から連続して3を引く計算をし,10秒間できるだけ早 く正確に解答した(例:実験者「500」→参加者「497,494,491…」).課題中 は,足関節を底背屈させ,スポンジマットを踏むよう指示した(図 3-1-3-c).
介入群と同様に,1日の総試行数は50回とし,半分の25回で休憩を挟んだ.3 桁の数字は,事前にランダム化した表に基づいて決定した(疑似ランダム条件).
a.硬度記憶(10秒間)
b.硬度弁別FB(最大10秒)
c.口頭暗算課題(10秒間)
図3-1-3.実験1各介入の流れ
②
③参加者:探索しながら覚える
①実験者:課題「これは4の硬さです」
①
②参加者:探索して解答「3の硬さです」
③実験者:FB「不正解,これは4の硬さです」
①実験者:課題「500」 ③参加者:解答「497,494,491...」
②
弁別精度テスト
硬度弁別精度は,弁別精度テスト10問中の正答数で評価した.弁別精度テス トは,介入課題と同様に,硬度の異なる5 種類のスポンジマットを用いて行っ た.スポンジマットの硬度の順番は,事前にランダム化した表に基づいて決定 した(疑似ランダム条件).なお,10問の課題の中で,5段階の硬度が各2回含 まれるように設定した.参加者は,実験者が試行ごとに足元に設置する硬度の 異なるスポンジマットに立ち上がり,記憶した情報をもとに硬度弁別を行い,
その番号が分かった時点で解答した(最大10秒).ただし,フィードバックは 与えなかった.
測定は各日の介入課題前後で行った(計4回:1 日目pre,1 日目post,2日
目pre,2日目post).1日目 preのタイミングにおいて,参加者はスポンジマッ
トの硬度情報がなく弁別精度テストの解答ができないため,課題前に硬度記憶 を5回行った(介入課題の硬度記憶と同様の手続き).この時の硬度の順番は,
上昇系列(1→2→3→4→5)と下降系列(5→4→3→2→1)とし,参加者間でカ ウンターバランスをとった.
片脚立位姿勢保持
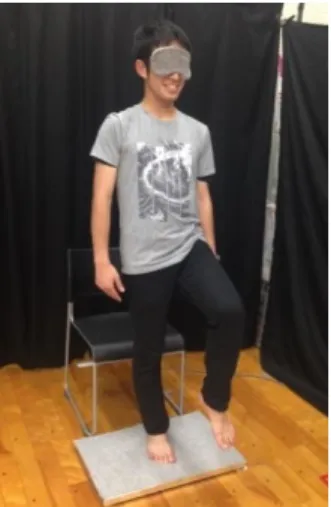
立位姿勢バランスは,片脚立位姿勢を保持した際の重心動揺の値を用いて評 価した.課題は,片脚立位姿勢となり,できるだけ揺れないように30秒間姿勢 を保持することであった.軸足は,基本的に問診の利き脚に統一したが,課題 実行が困難な場合は,非利き脚で実施した.課題の流れは,まず,両脚でフォ ースプレートに立ち上がり,安定したタイミングで片脚立位に移った.その後,
参加者は片脚立位姿勢が安定したタイミングで合図をし,測定を開始した.腕 の位置は体側に自然におろす位置とし,姿勢保持に必要であれば動かしてよい こととした.軸足の位置はフォースプレートの中心とした.非軸足は軸足に触 れないようにしたが,高さや位置の指定はしなかった.視覚条件は開眼および 視覚遮断の2条件とした.開眼条件では,視覚的な条件を参加者間で同一にす るため,フォースプレートから 50cm 離れた壁に取り付けた暗幕を見るように
した(図 3-1-4).また,視覚遮断条件では,アイマスクを着用した.転倒のリ
測定は各日の介入課題前後で行った(計 4回:1日目 pre,1 日目post,2 日
目pre,2日目post).1タイミングにつき,開眼条件・視覚遮断条件を交互に各
3 試行,計 6 試行実施した.どちらの視覚条件から始めるかは,参加者間でカ ウンターバランスをとった.また,視覚遮断条件において,片脚立位姿勢を30 秒間保持することが困難な場合は,1試行内で3回まで測定を繰り返した.
図3-1-4.実験1立位姿勢バランスの課題環境
二点識別覚
足底部における触覚の空間分解能は,二点識別覚で評価した.課題は,実験 者が足底部に触れるデジタルノギス(図3-1-1-c参照)の2点の幅が,1点と感 じるか2点と感じるかを解答することであった.参加者は長座の姿勢をとり,
アイマスクで視覚を遮断した(図 3-1-5).測定部位は,機械受容器が多く分布 する母指球および踵とし,利き足で実施した.
デジタルノギスの 2点の幅は,0~2.0㎝を0.1㎝間隔で接触した.幅の操作 は,心理物理学的手法の1つである階段法を用いた.具体的には,狭い幅から 始めて徐々に幅を広くしていく上昇系列(例:0 ㎝→0.1 ㎝→0.2 ㎝)と,広い 幅から始めて徐々に幅を狭くしていく下降系列(例:2.0㎝ →1.9㎝→1.8㎝)
で,幅を操作した.上昇系列では各幅に対する参加者の解答が1点から2点に 切り替わった点を偏移点とし,次の試行では幅を狭くした(例えば 1.0 ㎝に対 して「2点」と回答があった場合,次は0.9㎝を呈示).全部で4回の偏移が起 きた時点で,上昇系列での接触を終了とした.下降系列についても同様の手続
示).各部位において上昇系列・下降系列とも実施し,上昇系列・下降系列のど ちらの系列から開始するかについては,実験参加者間でカウンターバランスを 取った.
測定は各日の介入課題前後で行った(計 4回:1日目 pre,1 日目post,2 日 目pre,2日目post).
図3-1-5.実験1二点識別覚の課題環境
1.2.4 実験手続き
実験手続きは図3-1-6の通りである.本実験では,参加者の実験前の行動によ る実験結果への影響を軽減する目的で,課題前に足底部を休息する時間を設け,
感覚情報を統制した.具体的には,椅子の上で長座位の姿勢をとり,足底部に何 も触れない状態で約5分間休息した.休息の間に,参加者の基本情報の問診およ び実験の説明を行った.
課題の流れは,まず,重心動揺および二点識別覚を測定した.順番は,参加者 間でカウンターバランスをとった.その後,弁別精度テストを行った.ただし,1 日目では硬度情報がなく弁別精度テストの解答ができないため,課題前に硬度記 憶を5回行った.そして,介入課題として介入群は硬度弁別課題を,二重課題群 は口頭暗算課題を,それぞれ計50回行った.介入直後に再び弁別精度テストを行 い,最後に重心動揺および二点識別覚の測定を行った.実験は連続した2日間と し,両日とも同じ手続きで実施した.また,図3-1-2に示す通り,スポンジマッ トを踏む課題および二点識別覚の測定場所は,重心動揺の測定場所と異なるため,
1 日目 2 日目
図3-1-6.実験1の概要図
足底部休息(約5分間) ※1日目のみ問診含む
介入
介入群 <硬度弁別課題>
硬度記憶(15回)
↓
硬度弁FB(10回)
↓ 休憩
↓
硬度記憶(15回)
↓
硬度弁別FB(10回)
二重課題群<口頭暗算課題>
口頭暗算(25回)
↓ 休憩
↓
口頭暗算(25回)
1st day pre
硬度記憶(5回)
重心動揺(6試行)
二点識別覚
※順序はカウンターバランスをとる
弁別精度テスト(10問)
1st day post
重心動揺(6試行)
二点識別覚
※1st day preと同じ順序
弁別精度テスト(10問)
2nd day post
重心動揺(6試行)
二点識別覚
※1st day preと同じ順序
弁別精度テスト(10問)
2nd day pre
重心動揺(6試行)
二点識別覚
※1st day preと同じ順序
弁別精度テスト(10問)
1.2.5 分析方法
介入の効果を検証するために,硬度弁別精度,立位姿勢バランス,触覚の空間 分解能の3つの観点から分析を実施した.全項目において,グループ(介入群,
二重課題群 ※図ではそれぞれIntervention,Dual taskと標記)と測定タイミング
(1st day pre,1st day post,2nd day pre,2nd day post)の2要因混合計画の分散分析 を行った.
硬度弁別精度
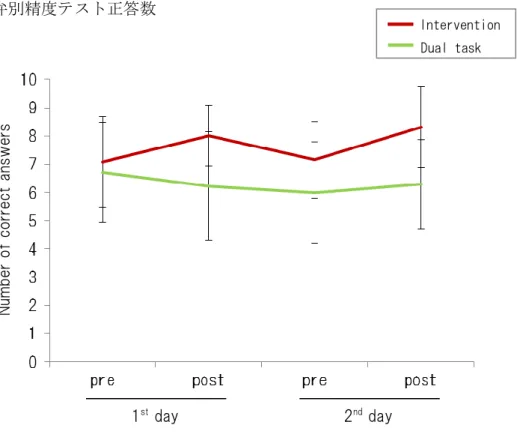
硬度弁別精度は,弁別精度テスト10問中の正答数(Number of correct answers)
を従属変数とした.各グループで測定タイミングごとに平均値を算出し,介入 群において硬度弁別精度の向上が見られるかを検証した.また,個人の変化量
(Difference in correct answers from post to pre)についても確認した.変化量は各 測定タイミングから1日目 preの値を減算した値を用いて,グループ(2)×測 定タイミング(3)の2要因分散分析を行い,介入群において高値であるかを検 証した.
立位姿勢バランス
立位姿勢バランスは,フォースプレートにより測定した重心動揺のデータを バターワース特性のローパスフィルタ(6Hz 以上のデータを遮断)にかけてノ イズを除去し,算出された以下の解析値を従属変数とした.
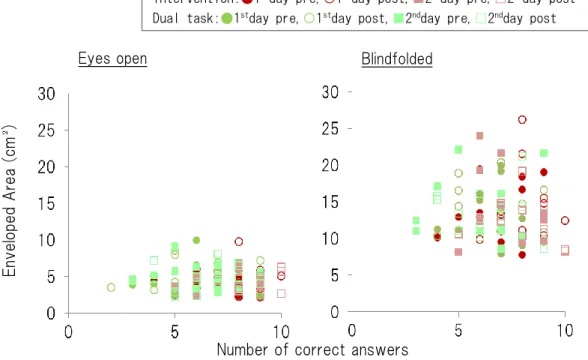
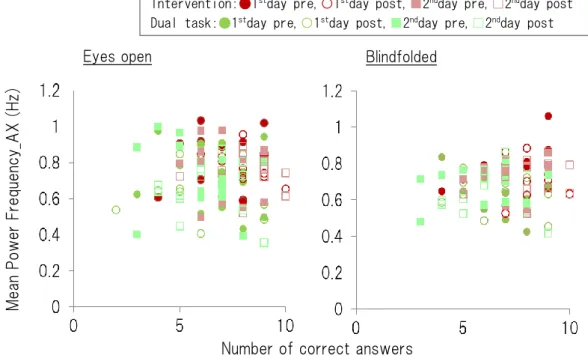
まず,姿勢動揺量の大きさの指標として,総軌跡長および外周面積を抽出し た.総軌跡長(Length of Total COP)は重心を投影する足圧中心(COP)の移動 距離を指し,外周面積(Enveloped Area)は総軌跡長の周囲を囲む移動範囲を示 す(解析における外周面積計算の角度は標準設定の 3°とした).両項目とも姿 勢制御を評価する際に広く用いられている項目である.本実験では,介入群に おいてこれらの値が減少するかを検証した.次に,姿勢制御方略を評価する指 標として,平均パワー周波数(Mean Power Frequency)を抽出した.重心動揺の 値から周波数解析を行うことで,どのような周波数帯域の成分が多いかを確認 することができる.値が大きいほど素早い調整であり,小さいほど緩やかな調
これら3 つの従属変数について,視覚条件別(Eyes open,Blindfolded)に2 要因分散分析を行った.片脚立位時の姿勢動揺量は視覚条件によって顕著に異 なることがあらかじめ予想されており,かつその交互作用も想定していないこ とから,3 要因デザインで分析する必要がないことがその理由である.各グル ープで測定タイミングごとに3試行の平均値を算出し,それぞれ検証した.
触覚の空間分解能
触覚の空間分解能は,部位ごと(Thenar,Heel)の二点識別覚閾値(Two point threshold)を従属変数とした.各グループで測定タイミングごとに上昇系列・
下降系列の計8個の偏移点の平均値を算出し,介入群において二点識別覚閾値 の減少が見られるかを検証した.
硬度弁別精度と立位姿勢バランスの相関
先行研究成果から,1日目で弁別精度テスト正答数が低く姿勢動揺量が大き いことや,10日目で弁別精度テスト正答数が高く姿勢動揺量が小さいといった ことから,負の相関関係が連想できる.そこで,そもそも硬さの差異を知覚す る能力と姿勢制御する能力に関連性があるかについて,弁別精度テストの正答 数と重心動揺の各項目(総軌跡長,外周面積,平均パワー周波数_左右,前後)
との間のPearsonの積率相関係数rを算出し,検証した.
1.3 結果
1.3.1 硬度弁別精度
各測定タイミングにおける弁別精度テスト正答数の結果を図3-1-7-a に示す.2 要因分散分析の結果,交互作用は認められなかった(F(3,75)=1.71, n.s.).また,
グ ル ー プ の 主 効 果 が 有 意 で あ り , 介 入 群 が 二 重 課 題 群 よ り 高 値 を 示 し た
(F(1,25)=12.86, p<.005). 測 定 タ イ ミ ン グ の 主 効 果 は 有 意 で は な か っ た
(F(3,75)=1.18, n.s.).
次に,各測定タイミングの値から1日目 preの値を減算した変化量の結果を図
3-1-7-bに示す.2要因分散分析の結果,交互作用は認められなかった(F(2,50)=0.67,
n.s.).また,グループの主効果が有意傾向であり(F(1,25)=3.49, p=.07),介入群が
二重課題群より高値である可能性が示唆された.測定タイミングの主効果は有意 ではなかった(F(2,50)=1.84, n.s.).
以上の結果から,介入が硬度弁別精度を向上させる可能性が示唆された.
a.弁別精度テスト正答数
b.弁別精度テスト正答数変化量
図3-1-7.実験1弁別精度テスト正答数
1st day 2nd day
Number of correct answers
Intervention Dual task
1st day 2nd day
Difference in correct answers from post to pre
1.3.2 立位姿勢バランス
視覚遮断条件において,片脚立位姿勢を30秒間保持することができなかった参 加者が4名おり,データを除外した.その結果,視覚遮断条件では介入群12名,
二重課題群11名のデータを分析した.
<姿勢動揺量の大きさ>
総軌跡長
視覚条件ごとに,各測定タイミングにおける総軌跡長の結果を図3-1-8に示す.
開眼条件において,2 要因分散分析の結果,交互作用は認められなかった
(F(3,75)=0.20, n.s.).また,グループや測定タイミングの主効果は有意ではなか った(グループ F(1,25)=0.30,n.s. ; 測定タイミング F(3,75)=1.96,n.s.).
視覚遮断条件においても,2 要因分散分析の結果,交互作用は認められなかっ た(F(3,63)=0.85,n.s.).同様に,グループや測定タイミングの主効果は有意ではな かった(グループ F(1,21)=2.02,n.s. ; 測定タイミング F(3,63)=1.75,n.s.).
図3-1-8.実験1総軌跡長
Length of Total COP(cm)
2nd day
1st day 1st day 2nd day
Eyes open Blindfolded
■Intervention
■Dual task