自動二輪車の低速走行における ライダーの挙動に関する研究
〜熟練度による差異の分析〜
平成 28 年 1 月
日本大学大学院理工学研究科博士後期課程
i
自動二輪車の低速走行におけるライダーの挙動に関する研究
〜熟練度による差異の分析〜
目 次
I. 序論 ... 1
I.1. 研究の背景 ... 1
I.1.1. わが国における交通事故の現状 ... 1
I.1.2. 二輪車の低速走行の重要性 ... 3
I.1.3. 一本橋走行訓練指導の現状 ... 4
I.1.4. 二輪車の低速走行に関する先行研究 ... 5
I.1.5. 熟練度の違いによるライダーの乗車技量比較実験の先行研究 ... 6
I.2. 研究の目的 ... 7
I.3. 研究の概要と論文の構成 ... 8
第 I 章の参考文献 ... 11
II. 二輪車の一本橋走行におけるライダー挙動測定方法の検討 ... 13
II.1. 緒言 ... 13
II.2. 実験装置 ... 14
II.2.1. 走行路レイアウト ... 14
II.2.2. 二輪車走行用直線狭路 ( 以下,一本橋 ) ... 15
II.2.3. 実験車両 ... 16
II.2.3.1. 実験車両の仕様 ... 16
II.2.3.2. 実験前車両準備 ... 17
II.2.4. ジャイロセンサ ... 18
II.2.5. ライダー装着保護具 ... 23
II.3. 実験協力者(以下,ライダー) ... 24
II.3.1. ライダー特性 ... 24
II.3.2. 倫理的配慮 ... 25
II.3.3. ライダーの実験タイムスケジュール ... 26
II.4. 実験方法 ... 27
II.4.1. 実験方法 ... 27
II.4.2. 解析用有効データ ... 28
II.4.3. 頻度分布解析 ... 29
II.5. 結果 ... 30
II.5.1.1. 一本橋走行パフォーマンス ... 30
II.5.1.2. 車体角速度 ωf... 31
II.5.1.3. ライダー背部角速度 ωb ... 33
II.5.1.4. ライダー頭部角速度 ωh ... 33
II.5.1.5. 車体加速度 αf ... 37
II.5.1.6. ライダー背部加速度 αb ... 39
II.5.1.7. ライダー頭部加速度 αh ... 41
II.5.1.8. 結果まとめ ... 43
II.6. 考察 ... 45
II.6.1. 一本橋走行のパフォーマンスの違いと走行特性の差異について .... 45
II.7. 第Ⅱ章の結論 ... 47
iii
III.3. 分析結果 ... 53
III.4. 考察 ... 55
III.5. 第Ⅲ章の結論 ... 56
IV. 熟練度の違いによる動作特性比較実験 〜角速度成分比較〜 ... 57
IV.1. 緒言 ... 57
IV.2. 実験装置 ... 58
IV.2.1. 実験コースレイアウト,実験器具およびライダー保護装着具 ... 58
IV.2.2. 計測機器 ... 59
IV.2.2.1. ポテンショメータ ... 60
IV.2.2.2. 歪みゲージ ... 62
IV.3. 実験方法 ... 66
IV.4. ライダー ... 67
IV.4.1. ライダー特性 ... 67
IV.4.2. 倫理的配慮 ... 69
IV.4.3. 各ライダーの実験の流れ ... 70
IV.5. データ処理 ... 71
IV.5.1. 解析用有効データ ... 71
IV.5.2. 頻度分布解析 ... 72
IV.6. 結果 ... 73
IV.6.1. 一本橋走行パフォーマンス ... 73
IV.6.2. 車体ロール角速度 ωfr ... 75
IV.6.3. 背部ロール角速度 ωbr ... 77
IV.6.4. 頭部ロール角速度 ωhr ... 79
IV.6.5. 各ピッチ角速度 ... 81
IV.6.6. 各ヨー角速度 ... 83
IV.7. 考察 ... 85
IV.8. 相互相関分析 ... 86
IV.9. 第Ⅳ章の結論 ... 87
V. 熟練度の違いによる動作特性比較実験 〜ハンドル操作成分比較〜 ... 88
V.1. 緒言 ... 88
V.2. 解析方法 ... 89
V.3. 結果 ... 90
V.3.1. ハンドル転舵角 θh ... 90
V.3.2. ハンドル上下荷重 Fv ... 92
V.3.3. ハンドル前後荷重 Fh ... 94
V.3.4. リアブレーキ踏み込み荷重 Fb ... 96
V.3.5. 結果まとめ ... 97
V.4. 考察 ... 98
V.4.1. 熟練度による低速走行時のハンドル荷重の差異について ... 98
V.4.2. 一本橋走行におけるライダー挙動のメカニズムについて ... 100
V.5. 第 V 章の結論 ... 102
第Ⅴ章の参考文献 ... 103
1 I. 序論
I.1. 研究の背景
I.1.1. わが国における交通事故の現状
わが国の交通において, 2014 年末における四輪車および自動二輪車の保有台 数を見てみると,それぞれ四輪車は 7718.8 万台,自動二輪車は 1168.9 万台で あり,非常に多くの自動車(原動機付自転車を含む)がわが国の道路上を走行 し社会における人々の豊かな移動に貢献している
[1].
ただし,豊かな交通社会を生み出している一方,残念ながら交通事故も多く 発生している. 2014 年の警察庁の統計
[2]によると, 1 年間に 573,842 件の交 通事故が発生しており, 4,838 人の尊い命が失われている.これらの交通事故 発生時の状態別死傷者数グラフ
[3]を図 1-1 .に示す.二輪車事故時における死 亡率
※は 1.21 %であり,全体平均の 0.59 %に対し非常に高い値を示している.
これらのデータが示すように,交通安全はわが国の社会を持続的に発展させ ていくために必要不可欠なことであり,モビリティを使ったより良い移動シス テムとして,環状交差点の導入などさまざまな施策がおこなわれている.ただ し,周囲の環境を整えることのみが全ての事故における最善な方策ではない.
自動車の運転手となる人間の運転能力を高めていくことも,この交通安全社会 のシステムの向上にとっては重要な要素として考えられる
[4][5].その中でも特 に,二輪車ライダーの重大事故を減らすための対策は最優先項目のひとつであ ると考える.
※死亡率(%)= 死者数 ÷ 死傷者数 × 100
図 1-1. 交通事故発生時の状態別死亡率 0.0
0.5 1.0 1.5 2.0 2.5 3.0
四輪⾞ ⼆輪⾞ 原付 ⾃転⾞ 歩⾏ 平均
死亡率 (%)
3
I.1.2. 二輪車の低速走行の重要性
混合交通の中において,二輪車は高速巡回走行だけでなく低速で走行するこ とが発生する.二輪車は自動車と異なり 2 つの車輪で走行する構造上の特性か ら,ジャイロ効果が得られなく,前方への運動エネルギーや慣性力も小さくな る低速走行の場合に,ロール方向の安定性が低くなることは一般的に知られて いる
[6].すなわち,低速での走行ではバランスを取ることが難しい.
ただし,この低速のバランス走行は二輪車の全ての走行における基礎能力と して重要な技術であり,操作を安全かつ的確におこなえるかどうかの判断する 材料として適当である.そのため二輪車免許を取得するための実技講習として 道路交通法による運転能力判断の基準に狭路極低速走行(以下,一本橋走行)
が定められている
[7].
また,一本橋走行は二輪車のバランス走行能力の取得の点からみても,ライ ダー自身が二輪車の挙動を敏感に感じ取ることができ,バランスを失った際の 修正方法を学ぶためなど,複合的な運転操作技術を学ぶ効果的な訓練方法であ る
[8].このように車体の挙動を敏感に感じ取れるようになることは,低速に限 らず二輪車を安定した状態で走行することができる能力として応用される.し たがって運転時において心の余裕を生むことが出来,結果安全マージンを持っ た走行が可能になってくる.
二輪車を機械として扱うのではなく,二輪車と向かい合い会話または対話を
するような人車一体の技術が得られるようになるのがこの一本橋走行訓練の特
徴といえる.
I.1.3. 一本橋走行訓練指導の現状
二輪車における一本橋走行の指導に関しては,指導に費やすことのできる時 間が限られていることもあり,指導要領
[9]やアドバイス集など
[10]をみても,
免許取得のために必要な基準タイムを達成するためのテクニックについて述べ られているものがほとんどであり,二輪車の挙動をどのようにして感じ取り,
ライダーがどのような行動をする必要があるかについては述べられているもの は無い.また,実際の訓練においても,アドバイス項目が多岐にわたることも あり,指導者の経験と勘によって指導がおこなわれているのが現状である.
すなわち,さまざまな変化が発生する実際の交通に対応できるようになるた
めの一本橋走行の指導というのは,現状の教習所教育においては十分に実施で
きていなく,ライダーと二輪車がどのようにバランス状態を作り上げているの
かをライダー自身が十分に理解できていないことが課題と考える.
5
I.1.4. 二輪車の低速走行に関する先行研究
二輪車の低速走行についての二輪車の動作研究としては,辻井らが二輪車の 操舵機構を検討していく中で,前後輪のタイヤの接地点と車両の重心位置に着 目し,重力ベクトルとの関係性を使って安定性の評価をおこなうなど,車両の メカニズムに関する研究はおこなわれている
[11].
その一方,バランスを失うポイントのひとつと考えられるライダーの動きや 操作に着目した研究は少ない.横森らがおこなった低速直進走行時のライダー の直立安定制御
[12]の中では,平坦な直線舗装路を走行し最低走行速度を走行 可能速度,実際には平均車速 5.0 km/h 程度で小型自動二輪車を用いて実験をお こない,直進および直立の安定のためにライダーが車体をバンクさせた(傾か せた)後にハンドルの転舵操作動作が発生していることを示した.
また田中らがおこなった低速走行時における二輪車ライダーの挙動分析の 実験
[13]では,低速時のライダーモデルの検討のために平坦なアスファルト舗 装直進路をスクーター型の電動二輪車で走行し,最低走行速度条件としては 5.0 km/h で走行の実験をおこない,転舵角とヨーレイトの最大値が大きくなって おり,速度が高いときよりもライダーが大きい挙動を示していることを報告し ている.
ただし,いずれの実験においても,本研究で取り扱う速度域,およそ 2.0 km/h
以下とは乖離している状態で,走行幅の規制もないため,走行状態でバランス
が乱れた結果,発生するふらつき後の修正の影響を含めたライダーの挙動につ
いて検討をおこなった実験であり,ライダーがバランスを失わないためにどの
ような挙動を必要としているかの検討はできていない.
I.1.5. 熟練度の違いによるライダーの乗車技量比較実験の先行研究
熟練度の違いによる乗車技量の差の確認をおこなっている先行研究としては,
Terada がおこなった Comparison of Head Movement and EMG Activity
of Muscles between Advanced and Novice Horseback Riders at Different
Gaits.
[14]があり,この中では, 「常歩 (なみあし) 」という馬の歩く速度で
の騎手の熟練度の違いにおける人体の挙動の比較をおこなっていた.技量の比 較項目としては,頭部の前後方向および上下方向の加速度と, EMG (直腹筋,
脊柱起立筋,大外転筋)の測定を同時におこなっていた.この中で,初心者の
特徴として頭部の前後方向に度数分布の分散が見られた( p < .10 )と述べて
いる.しかしながら,乗馬という上下方向の動的な運動を伴う状態の解析であ
るため,本研究で取り扱う二輪車の低速走行でのバランス状態と同様に判断を
おこなうことはできないと判断した.
7
I.2. 研究の目的
二輪車の基礎運転能力向上のために必須である一本橋走行に対して,今後の 運転技術指導の基礎として正しい動作メカニズムに基づいた指導を実施可能と していく必要がある.
そこで本研究では,本メカニズムを明らかにするためにライダー-車体系の 安定となる条件を導き出すことを目標とした.
その中で,安定した一本橋走行をおこなっているライダーの動作と車体の挙
動の特徴を明確にしていくことを目的とし,従来検討されていなかった走行制
限の高い狭路(一本橋)を用い,熟練度の異なるライダーにおける二輪車を用
いた比較走行実験を実施した.
I.3. 研究の概要と論文の構成
本論文は I 章から VI 章までで構成されている.以下に各章毎の概要について 述べる.また,本論文の構成を図 1-2. に示す.
I章 序論
本研究の背景となる混合交通の中の二輪車の走行特性と課題に関する現状お よび,二輪車の走行に関する先行研究の現状について検討して述べるとともに,
現状の課題および問題点について考察をおこなった.さらに,本研究の目的を 明示した.
II章 二輪車の一本橋走行における上体挙動測定方法の検討
二輪車における一本橋走行中のライダーの動作と車体の挙動を明確にする
ために,熟練度の異なるライダーによる一本橋を用いた比較走行実験を実施し
た.また,この中で 6 軸ジャイロセンサを用いた測定の効果,検証をおこなっ
た.
9
IV章 熟練度の違いによる動作特性比較実験
〜角速度成分比較〜
走行熟練度によるライダーの上体挙動の特性を明確にするため,訓練経験の 異なる 14 名による,一本橋走行時のライダーと車体の角速度成分の比較をお こない,パフォーマンスの違いによる角速度成分の変化について検証した.
V章 熟練度の違いによる動作特性比較実験
〜ハンドル操作成分比較〜
Ⅳ章の実験で得られた角速度成分データ以外の特性を明確にするために,ハ ンドル転舵角およびハンドルへの荷重とリアブレーキ荷重データの解析をおこ なった.また第Ⅳ章と第Ⅴ章の実験結果から,一本橋走行におけるライダーの バランス維持動作と操作について考察をおこなった
VI章 結論
各章での結論をまとめ,本研究で得られた成果と一本橋走行における指導
ポイントの提案および今後の展望を述べた.
I 章 序論
II 章 二輪車の一本橋走行における ライダー挙動測定方法の検討
Ⅳ章 熟練度の違いによる動作特性比較実験 〜角速度成分比較〜
V 章 熟練度の違いによる動作特性比較実験 〜ハンドル操作成分比較〜
III 章 位相差比較によるライダーの動作特性
比較方法の検討
11 第 I 章の参考文献
1-1) 国土交通省:平成 26 年度 自動車輸送統計年報 付表(2) 総括表 自動
車保有台数および生産台数の推移,国土交通省総合政策局交通経済統計調
査室, 2015
1-2) 警察庁:平成27年版 警察白書,日経印刷, 2015
1-3) 警視庁:交通事故の発生状況について,警視庁交通総務課統計資料,
pp.8-9,2015
1-4) 近田 茂:バイク知識とライディングテクニック,株式会社 永岡書店,
1992
1-5) 内閣府:平成27年度版 交通安全白書,勝美印刷 株式会社,2015
1-6) 関根 太郎 他:長江啓泰のバイクに乗るための ABC ,啓正社, 2015
1-7) 警察庁:運転免許技能試験実施基準,警察庁交通局, 2014
1-8) 藤井 璋美:オートバイ ライディング テクニック,山海堂 , pp.16-21,
1971
1-9) ホンダ安全運転普及本部: SAFETY RIDING 2 輪テキスト(指導者用),
服部印刷株式会社 , 2004
1-10) 門名秀樹:オートバイ操縦法,株式会社ナツメ社,pp.96-97,1982
1-11) 辻井 栄一郎 他:二輪操舵システムの開発, YAMAHA MOTOR TECHNICAL
REVIEW ,第 47 号, pp.67-73 , 2011
1-12) 横森 求 他:低速直進走行時のオートバイのライダによる操作特性,日
本機械学会論文集(C 編),57 巻,540 号,1991
1-13) 田中 穣 他:低速時における二輪車ライダの挙動分析の実験,日本大学
理工学部 学術講演会論文集, pp.895-896 , 2013
1-14) Terada : Comparison of Head Movement and EMG Activity of Muscles
between Advanced and Novice Horseback Riders at Different Gaits , Journal
of Equine Science , Vol. 11 , No.4 , pp.83-90 , 2000
13
II. 二輪車の一本橋走行におけるライダー挙動測定方法の検討
II.1. 緒言
二輪車の低速走行におけるライダーの上体挙動のメカニズムを明確にするた めには,ライダーの上体挙動を正しく測定する必要がある.
従来,二輪車における人体挙動の測定には森島らが,操縦技量を定量化し,
ライダーに伝えるシステムを構築するために熟練度の異なる 15 名のライダー による走行実験で,車両およびライダーについて測定をおこなってきた
[1].こ の先行研究では,ライダーの腕の筋活動,頭部運動,各種操作と車両の挙動を 測定し,ライダーの技術評価とライダーの操縦の特徴の定量化の可能性を示し ていた.ただし,この実験では,トライカーナコース
※における最速走行とい う条件での旋回操作挙動に関するテクニックの測定であり,今回のような低速 走行におけるバランス走行テクニックとは上体の挙動が異なることが明らかで ある.
本章では,二輪車の低速走行でのバランス状態を確認するシステムを確立し ていくため,ジャイロセンサを用いライダーの上体の加速度および角速度挙動 を明確にさせることを試みた.
※ トライカーナコース:
右図のレイアウトに並べたパイロンをコースと見立て,
8の字状に2周走行しタイムを測定するもの[1].
II.2. 実験装置
II.2.1. 走行路レイアウト
実験は平坦なアスファルト路面に一本橋を設置し走行をおこなった.本実験 の走行路のレイアウトを図 2-1 .に示す.橋の手前 4.0 mの所にスタートポイン トを設定し,一本橋に乗る前に助走区間で車体を安定させられるようにした.
また,一本橋走行終了後 3.0 mの走行区間を設け,ゴール地点で停止し安全確 認後,次の行動に移った.
図 2- 1 .走行路レイアウト
4.0m 一本橋乗車区間 3.0m
15.0m
15
II.2.2. 二輪車走行用直線狭路 ( 以下,一本橋 )
実験に用いた一本橋は,図 2-2 .に示す自動車教習所などで使用しているも のと同形状の幅 0.3 m,⻑さ 15.0 m,高さ 0.05 mのアルミ製のものを使用した.
一本橋の入り口および出口には,急激な人体および車体の挙動変化が発生しな いようにするため⻑さ 0.3 mのスロープを設けた.
図 2-2 .一本橋レイアウト
0.3m
15.0m 0.3m
0.05m
II.2.3. 実験車両
II.2.3.1. 実験車両の仕様
車両は大型自動二輪教習においても多く使用されている,排気量 750cc の自
動二輪車 CB750 ( Honda 製 )を用いた.なお,走行上の安全を確保するため,
以下の条件を満たす車両を選択した.
定期的( 2 回以上 / 週)に本実験同走行の使用をおこなっているもの
転倒リスク軽減用バンパ装備(大型自動二輪教習所と同仕様)
また,実験ごとに車両の特性差が生じないようにするため,1 台の二輪車に 交代で乗車した.表 2-1 .に主な車両の特性を示す.
表 2-1 .車両特性
[2]型式 BC-RC42
総排気量 (ℓ) 0.747
全長(mm) 2155
全幅 (mm) 780
ホイールベース(mm) 1495
総重量(kg) 235
キャスター角(°) 26
タイヤサイズ(前) 120/70
17
II.2.3.2. 実験前車両準備
本実験前に以下の準備をおこなった.
1. 日常点検を実施し,走行に影響の無いことを確認 2. 前後空気圧を 250kPa となるよう調整
3. 車両の中央上部にジャイロセンサを取り付け
II.2.4. ジャイロセンサ
ライダーと二輪車車体(以下,車体)の挙動測定には小型ワイヤレスジャイ
ロセンサ TSND 121 ( ATR-Promotions inc. 製,以下ジャイロセンサ)を用い
た.取り付け位置は以下に示す 3 箇所とした.
①車体中央上部
②ライダー背部
(ライダー装着胸背部プロテクタ上の第 3 胸椎棘突起点部に装着)
③ライダー頭部
(ライダー装着ヘルメット上の後頭部最後部に装着)
各ジャイロセンサの取り付け位置を図 2-3 .に示す.
図 2-3 .ジャイロセンサ取り付け位置 1
2
3
19
本ジャイロセンサはそれぞれの 3 軸の加速度(上下,前後,左右)および角 速度(ピッチ角,ロール角,ヨー角)を測定した.センサの加速度および角速 度の測定方向を図 2-4 .に示す.データの記録はジャイロセンサ内臓のハード ディスクにおこなった.また,記録されたデータは多機能センサ用受信ソフト
ウェア Sensor Controller ( ATR-Promotions inc. 製 )を用いて CSV 形式に変換
をして解析用 PC に取り込んだ.データの測定および出力の概念図を図 2-5 .に 示す.なお,サンプリング周波数は 50Hz ,加速度の測定レンジは ± 2G ,角速 度の測定レンジは ±250deg/s とした.
また,ジャイロセンサの技術仕様を表 2-2 .,表 2-3 .に示す
図 2-4.ジャイロセンサの測定方向
左右加速度 ピッチ角速度ロール角速度
前後加速度 ヨー角速度
上下加速度
21
表 2-2 .ジャイロセンサの技術仕様
[4] CPU ルネサステクノロジ社 RX621 稼働時間 約 6 時間サイズ 37mm(W)× 46mm(H)× 12mm(D)
重さ 約 22g
無線送信 Bluetooth Ver2.0+EDR Class2 (通信距離最⻑ 10m)
メモリ保存 512Mbit(加速度・角速度 100Hz で約 5.8 時間)
有線接続 USB シリアル通信
加速度・角速度センサ InvenSense MPU-6050
サンプリング: 最大 1000Hz(1〜255ms 周期)
加速度レンジ:±2G/±4G/±8G/±16G 角速度レンジ:
±250deg/s/±500deg/s/±1000deg/s/±2000deg/s
表 2-3 .ジャイロセンサの測定精度
[4]測定項目 測定レンジ 分解能 出⼒単位
加速度
±2G 0.06mG
0.1mG
±4G 0.12mG
±8G 0.24mG
±16G 0.48mG
角速度
±250deg/s 0.008deg/s
0.01deg/s
±500deg/s 0.015deg/s
±1000deg/s 0.030deg/s
±2000deg/s 0.061deg/s
測定項目 サンプリング周期 最大周波数 平均化回数 メモリ記録
加速度・角速度 1〜255ms
(1ms 単位指定) 1000hz 1〜255 する/しない
23
II.2.5. ライダー装着保護具
実験走行中のライダーの保護のため,以下の防具を着用し走行をおこなった.
図 2-6. に装着品の一部を示す.
1) ヘルメット (図 2-6. ( a ))
2) 胸背部プロテクタ (図 2-6. ( b ))
3) 肘部プロテクタ (図 2-6. ( c ))
4) 膝部プロテクタ (図 2-6. ( d ))
5) ライディンググローブ 6) ライディングブーツ
なお,胸背部プロテクタ,及びヘルメットにはⅡ .2.4 .で説明したジャイロ センサを固定した.
(a)ヘルメット(b)胸背部プロテクタ (c) 肘部プロテクタ(d)膝部プロテクタ
図 2-6 .ライダー装着保護具測定時使用防具
II.3. 実験協力者(以下,ライダー)
II.3.1. ライダー特性
ライダーは,企業において二輪車インストラクターとして一本橋走行の訓練 経験のある 2 名で,一本橋走行の平均走破時間から以下表 2-4 .のように初級 者および熟練者と分類した.
表 2-4 . ライダー特性
分類 平均走破時間 身⻑( mm ) 体重( kg ) 一本橋走行 経験年数
初級者 25 秒程度 1683 55.0 1 年
熟練者 50 秒程度 1789 63.9 3 年
25
II.3.2. 倫理的配慮
各ライダーには事前に目的,方法,個人情報に関する秘密の保持などの本研
究の主旨を説明し,参加は自由であることと自分の意思で中止できる内容を文
章および口頭で説明をおこない,同意を得て実験をおこなった.また,実験に
際しては十分に安全への配慮を行って実施した.
II.3.3. ライダーの実験タイムスケジュール
本実験のライダー 1 人あたりのタイムスケジュールを図 2-7 .に示す.実験 会場に到着後,当日の体調確認とライダーへの実験説明をおこない,実験可否 判断をおこなった.その後保護具,機器の装着をおこなった.また,本試験走 行前には実験車両に慣れてもらうため,時速 20km/h でのウォーミングアップ 走行をおこない,その後一本橋走行に慣れてもらうため, 1 回の練習走行を実 施し本実験走行をおこなった.
10 20 30 40 (分) 実験説明
機器,保護 具装着 ウォーミングアップ
本実験 片付け
図 2- 7 .実験ライダーのタイムスケジュール
27
II.4. 実験方法
II.4.1. 実験方法
ライダーには,着座状態かつ正しい乗車姿勢
[5]かつ,両足底を車体のライ ダー用ステップに乗せた状態で,なるべく⻑い時間一本橋の上で走行するよう 教示をおこなった.その他の走行方法についての制限はおこなわず,アクセル,
ブレーキ,クラッチ,ハンドル操作などは自由とした.ライダーの一本橋乗車 中の姿勢に関しては,実験担当者が測定中に実験車両の後方からチェックをお こない,異常姿勢が発生していないことを確認した.
一本橋走行におけるライダーのパフォーマンス測定区間は図 2-8 .に示すよ うに,一本橋上に二輪車の両輪が乗っている状態,すなわち二輪車の後輪が橋 の水平面に乗った状態をスタート,橋の水平面から前輪が降りた状態をエンド とし,実験担当者がストップウォッチで測定した.また,測定された加速度,
角速度データも同じ箇所で抜粋し各測定データとした.
図 2-8 . 一本橋走行テストイメージと測定区間 有効データ
20.0s 0.5s
II.4.2. 解析用有効データ
実験走行の中でライダーが橋から落ちることなく 5 回走破できた走行を有効 データとし、その走行データのうち最もパフォーマンスの高かった(⻑時間 一本橋の上で走行できた) ものをパフォーマンスデータおよび測定データとし て採用した.
測定データは初級者,熟練者ともに橋のゴール 0.5 秒手前地点を基準として その手前 20.0 秒間を解析データとして使用した(図 2-8. ).また,得られた データは 3 点移動平均で平滑化をおこなった(図 2-9.).
図 2-9 .加速度波形データサンプル
-150 -100 -50 0 50 100
-50 0 50 100 150
31.9 51.9 71.9 91.9 背中ヨー角速度
[deg/s]
⾞体ピッチ角速度[deg/s]
テスト時間 [s]
⾞体 ピッチ 角速度 背中 ヨー 角速度
29
II.4.3. 頻度分布解析
初級者および熟練者の一本橋走行中における挙動を比較するために,それぞ れの加速度域と角速度域の頻度を算出した.得られた測定データのうち,加速 度の一部を除くほぼ全てのデータは図 2-10 .に示す例のように, 0 を中心にほ ぼ左右対称で分布していた.そのため,ピーク値を比較することで特徴を抽出 する事とした.
図 2- 10 .頻度分布グラフサンプル
0%
5%
10%
15%
-100 -75 -50 -25 0 25 50 75 100
頻度(%)
角速度 ( deg/s )
初級者 熟練者
II.5. 結果
II.5.1.1. 一本橋走行パフォーマンス
パフォーマンスの指標となるライダーの一本橋走行時間はそれぞれ初級者 30.6 秒,熟練者 66.8 秒であった.また,それぞれの走行時間を時速に換算する と,初級者では 1.76 km/h ,熟練者では 0.81 km/h となり,先行研究の実験に おける速度域,約 5.0 km/h とは大きく異なっていることが確認できた(表
2-5 .).
表 2- 5. 一本橋走行パフォーマンス
走行タイム
( s )
平均走行速度
( km/h )
初級者 30.6 1.76
熟練者 66.8 0.81
31
II.5.1.2. 車体角速度
ωf
図 2-11. ( a )〜( c )にライダーごとの車体角速度 ωf の頻度分布を示す.
車体挙動において,車体ロール角速度は,熟練者の 0 deg/s 付近の頻度が約 2.0 倍高かった(図 2-11 . ( b )).一方,車体ピッチ角速度と車体ヨー角速度は初級 者と熟練者の間で大きな差異はなかった(図 2-11. ( a ),図 2-11. ( c )).
( a ) 車体ピッチ角速度
0 400 800 1200 1600
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
( b ) 車体ロール角速度
0 400 800 1200 1600
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
0 400 800 1200 1600
頻度[回]
初級者 熟練者
33
II.5.1.3. ライダー背部角速度 ωb
図 2-12 .( a )〜( c )にライダーごとの背部角速度 ωb の頻度分布を示す.
熟練者のライダー背部ロール角速度は初級者に比べ中心域の頻度において 2.8 倍高い値を示した(図 2-12. ( b )).一方,ライダー背部ピッチ角速度,
ヨー角速度に関しては,初級者と熟練者の間で大きな差異はなかった.
( a ) ライダー背部ピッチ角速度
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
( b ) ライダー背部ロール角速度
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
35
II.5.1.4. ライダー頭部角速度 ωh
図 2-13 .( a )〜( c )にライダーごとの頭部角速度 ωh の頻度分布を示す.
熟練者のライダー頭部ロール角速度は初級者に比べ中心域の頻度が顕著に高く,
ピーク値が 4.4 倍であった (図 2-13. ( b )).一方,ライダーピッチ角速度,
ヨー角速度に関しては,初級者と熟練者の間で大きな差異はなかった.
( a ) ライダー頭部ピッチ角速度
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
( b ) ライダー頭部ロール角速度
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
0 200 400 600 800 1000
-60 -40 -20 0 20 40 60
頻度[回]
角速度 [deg/s]
初級者 熟練者
37
II.5.1.5. 車体加速度 αf
図 2-14. ( a )〜( c )にライダーごとの車体加速度 αf の頻度分布を示す.
車体加速度成分の分布状態は初級者と熟練者の間で同様の傾向を示しており,
両群での大きな差異はなかった.
( a ) 車体前後加速度
0 100 200 300 400 500
-6 -4 -2 0 2 4 6
頻度[回]
加速度 [m/s2]
初級者 熟練者
( b ) 車体左右加速度
0 200 400 600 800 1000
-6 -4 -2 0 2 4 6
頻度[回]
加速度 [m/s2]
初級者 熟練者
0 200 400 600 800 1000
4 6 8 10 12 14 16
頻度[回]
加速度 [m/s2]
初級者 熟練者
39
II.5.1.6. ライダー背部加速度 αb
図 2-15. ( a )〜( c )にライダーごとの背部加速度 αb の頻度分布を示す.
ライダー背部の前後加速度の分布状態はピークの中心軸が初級者で 9 付近,
熟練者で 7 付近となり,また上下加速度では初級者が 5 付近,熟練者で 8 付近 となり異なった特性を示した.ただし,ピーク中心軸には差異が生じているが、
分布傾向そのものは同様の傾向を示していた.このことから,このピーク中心 軸の差異はライダーの乗車姿勢の違い,すなわち上半身の前傾度の違いに伴う 重力加速度の差異と考えられ,ライダーの動作の特徴は発生していないと判断 した.
( a ) ライダー背部前後加速度
0 100 200 300 400 500
2 4 6 8 10 12
頻度[回]
加速度 [m/s2]
初級者 熟練者
( b ) ライダー背部左右加速度
0 200 400 600 800 1000
-6 -4 -2 0 2 4 6
頻度[回]
加速度 [m/s2]
初級者 熟練者
0 200 400 600 800 1000
頻度[回]
初級者 熟練者
41
II.5.1.7. ライダー頭部加速度 αh
図 2-16. ( a )〜( c )にライダーごとの頭部加速度 αh の頻度分布を示す.
ライダー頭部の加速度成分の分布状態においても,ライダー背部加速度の分布 状況と同様にピーク中心軸の差異が見られた.この差異も同様にライダーの乗 車姿勢における前傾度の違いによるものと考えられる.この現象を除き,両者 の分布に特徴的な差異は発生していなかった.
( a ) ライダー頭部前後加速度
0 200 400 600 800 1000
0.0 2.0 4.1 6.1 8.2 10.2 12.2
頻度[回]
加速度 [m/s2]
初級者 熟練者
( b ) ライダー頭部左右加速度
0 200 400 600 800 1000
-6.1 -4.1 -2.0 0.0 2.0 4.1 6.1
頻度[回]
加速度 [m/s2]
初級者 熟練者
0 200 400 600 800 1000
0.0 2.0 4.1 6.1 8.2 10.2 12.2
頻度[回]
加速度 [m/s2]
初級者 熟練者
43
II.5.1.8. 結果まとめ
結果Ⅱ .5.1.2 からⅡ .5.1.7 で得られた角速度および加速度の結果一覧を 表 2-6 .に示す.なお,パフォーマンスを除き初級者と熟練者でのピーク量比 は以下の式で求めた.
ピーク値比=
熟練者は初級者に比べ,車体ロール角速度のピーク値が 2.0 倍大きい値を示 した.また,ライダー頭部ロール角速度のピーク値は 4.4 倍の差があることが 確認できた.
熟練者ピーク値
初級者ピーク値
表 2-6 .角速度,加速度結果一覧
項目
初級者と熟練者の ピーク量比 パフォーマンス(タイム比) 1.7
角速度
車体ピッチ 0.9 車体ロール 2.0
車体ヨー 1.0
背部ピッチ 1.3 背部ロール 2.8
背部ヨー 1.0
頭部ピッチ 0.7 頭部ロール 4.4
頭部ヨー 0.7
加速度
車体前後 1.1
車体左右 1.1
車体上下 1.0
背部前後 0.8
背部左右 1.2
45
II.6. 考察
II.6.1. 一本橋走行のパフォーマンスの違いと走行特性の差異について
本実験の結果,初級者と熟練者の走行タイムは,それぞれ熟練者は 66.8 秒,
初級者は 30.6 秒であり,熟練者の方がより低速状態で走行をおこなうことが
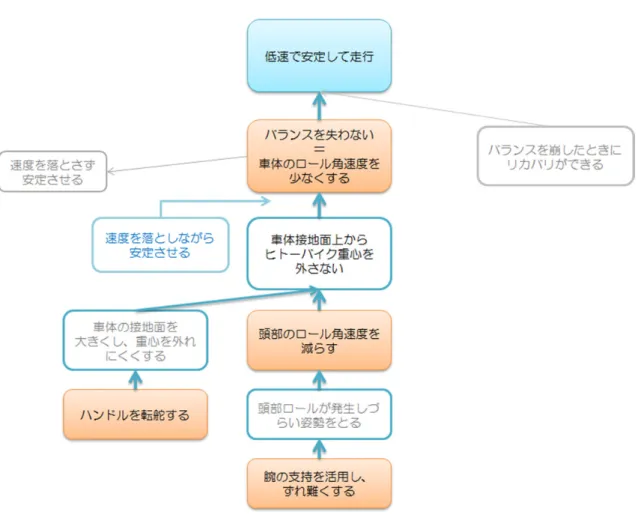
できていた.このパフォーマンスの違いについて,ライダーの動作および車体 の挙動の差異に着目すると,両者の角速度成分の分布において,熟練者は初級 者に比べ車体ロール角速度の 0 付近のピーク量が 2.0 倍大きくなっていた.ま た,ライダー頭部ロール角速度の 0 付近でのピーク量は 4.4 倍の差があること が明確になった.このことから,熟練者はライダー頭部および車体における ロール方向の急激な動作が少ないことが明らかとなった.
熟練者は,ライダーと車体を合わせた重心位置から離れているライダー頭部 の急激な動きを少なくすることで,ライダーと車体を含めた全体のロール方向 の急激な動きも小さくすることが可能となり,極低速でバランスを取ることが できていると考えられる.走行中にライダー背部の動きと共にライダー頭部が 同じ方向に動いてしまうと,上体のバランスは大きく乱れてしまうことになる.
またそのことは,この乱れた動作を修正するために,より大きな動きが必要と なってしまう.したがってライダー-車体系のバランスシステムの乱れを最小 限に抑えることは、その後のリカバリーのし易さにも効果があると考えられる.
また,ライダー頭部のロールが小さくなることは上体のバランス状態に変化 が発生した場合でも,小さな動作で修正が可能となるとともに,修正に必要な 動作そのものが減ることもあり,車体に生じるロールの変化を敏感に感じ取れ るようになる.これらのことからライダー頭部のロールを小さくする事が,一 本橋走行での安定につながるという事が示唆された.
一方,加速度要素における初級者と熟練者での差異は乗車姿勢に伴う前傾度
の影響を除いては両群の差異を確認することができなかった.このことから加
速度要素は一本橋走行のパフォーマンスの差に影響を及ぼさないと言うことが
明確になった.以上より加速度成分と角速度成分は独立に働いていると考えら
れ,加速度方向の影響を受けず角速度のみで判断ができることが明確になった.
47
II.7. 第Ⅱ章の結論
二輪車の極低速バランス走行におけるライダーの動作を確認するために初級 者と熟練者による一本橋走行実験をおこなった.
実験結果から,車体およびライダーの背部,頭部のロール角速度成分に熟練 度の違いによるものと思われる差異が確認できた.特に頭部ロールの角速度は ピーク値比で 4.4 倍と顕著な差異が発生していた.
このことから熟練者は,車体とライダーを合わせた重心位置から離れており,
慣性モーメントの影響も大きいライダー頭部の急激な動きを少なくすることで,
車体とライダーを含めた全体のロール方向の急激な動きを小さくさせ,極低速
走行状態でもバランスを取ることが可能となっていると考えられる.
第 II 章の参考文献
2-1) 森島 圭祐 他:自動二輪車ライダーの操縦技量定量化に関する基礎研究,
YAMAHA MOTOR TECHNICAL REVIEW ,第 50 号, pp71-80 , 2014
2-2) 本田技研工業株式会社: CB750 取扱説明書, 2007
2-3) 株式会社 ATR-Promotions :製品・サービス,小型無線多機能センサ TSND
121 , http://www.atr-p.com/products/TSND 121.html
2-4) 株式会社 ATR-Promotions :小型無線多機能センサ TSND 121 ユーザー
ズマニュアル,2013
2-5) 本田技研工業株式会社:安全運転協議に関する「競技規則」 「競技実施要
領」「審査基準」,本田技研工業株式会社 安全運転普及本部, 2015
49
III. 位相差比較によるライダーの動作特性比較方法の検討
III.1. 車体ロール角速度とライダー頭部角速度の関係
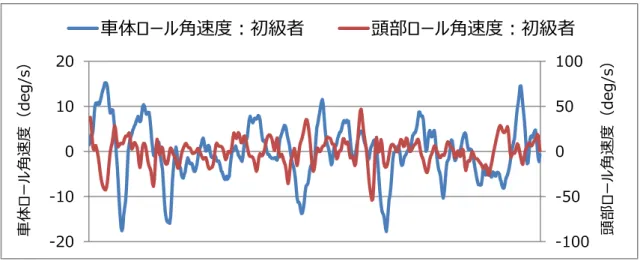
図 3-1 .および 図 3-2 .は初級者と熟練者における車体ロール角速度とライ ダー頭部角速度の 10 秒間の波形を抜粋したものである.
この車体ロール角速度とライダー頭部角速度の測定波形に着目したところ,
初級者において熟練者には見られない位相遅れの関係性の傾向を示しているこ
とが推測できた.本章では,この現象の確認のための手法を検討し,解析をお
こなった.
図 3- 1 .初級者の車体ロール角速度とライダー頭部ロール角速度波形
図 3- 2 .熟練者の車体ロール角速度とライダー頭部ロール角速度波形
-100 -50 0 50 100
-20 -10 0 10 20
頭部ロール角速度(deg/s)
⾞体ロール角速度(deg/s)
⾞体ロール角速度:初級者 頭部ロール角速度:初級者
-20 -10 0 10 20
-20 -10 0 10 20
頭部ロール角速度(deg/s)
⾞体ロール角速度(deg/s)
⾞体ロール角速度:熟練者 頭部ロール角速度:熟練者
51
III.2. 分析方法:相互相関係数
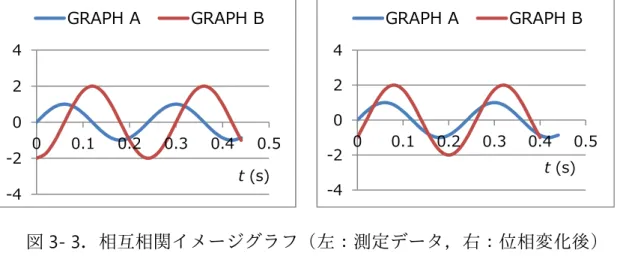
Ⅲ .1. で仮説した位相遅れの傾向を確認するために,相互相関係数を用いた.
この相互相関係数を用いることにより,車体ロール角速度の波形と頭部ロール 角速度の波形が,位相の変化により同じ傾向を示しているかを確認することが できる.図 3-3 .に位相の変化と相関係数の上昇についてのイメージ図を示す.
また,図 3-3 .波形に対する相関散布図の変化を図 3-4 .に示す.
本章では,第Ⅱ章で測定をおこなったデータに対して,位相ずれなしの状態
を基準として,サンプリング周波数から 0.02 秒ごとに頭部角速度の波形をずら
し,それぞれの相関係数を算出することとした.
図 3- 3.相互相関イメージグラフ(左:測定データ,右:位相変化後)
図 3- 4 .図 3-3 グラフの相関散布図
( 相関係数 左図: r = 0 ,右図: r = 0.84 )
-4 -2 0 2 4
0 0.1 0.2 0.3 0.4 0.5 t(s) GRAPH A GRAPH B
-4 -2 0 2 4
0 0.1 0.2 0.3 0.4 0.5 GRAPH A GRAPH B
t(s)
-3 -2 -1 0 1 2 3
-2 -1 0 1 2
-3 -2 -1 0 1 2 3
-2 -1 0 1 2
53
III.3. 分析結果
初級者および熟練者それぞれの相互相関係数を図 3-5 .に示す.また,初級 者における位相遅れなし時点と位相を遅らせ相関係数が最大になった時点での 相関散布図の変化を図 3-6 .に,熟練者における位相遅れなし時点と位相を遅 らせ相関係数が最大になった時点での相関散布図の変化を図 3-7 .に示す.
グラフより,初級者においては 0.14 秒ライダー頭部の位相を遅らせた時点 で相関係数が r = 0.75 となり最大値を示した.一方,熟練者においては位相を 変化させても相関係数の大きな変化は起こらなかった(最大相関係数 r = 0.35 ).
すなわち,ライダー頭部の位相をずらすことにより初級者では相関係数が高 くなり,ライダー頭部がロールすることにより車体もロールしている傾向が明 確になった.
図 3- 5 .車体ロール角速度とライダー頭部角速度との相互相関
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
相関係数[r]
頭部位相のずれ [ s ]
初級者 熟練者
(a)位相遅れなし (b)ライダー頭部位相遅れ 0.14s 図 3- 6 .初心者の車体ロール角速度とライダー頭部ロール角速度との相関
( a )位相遅れなし ( b )ライダー頭部位相遅れ 0.16s
55 III.4. 考察
車体ロール角速度とライダー頭部角速度の関係に着目したところ,初級者に おいて,熟練者には見られない位相遅れの傾向があることが確認できた.この ことは,初級者においてはライダー頭部が動いた後に車体が動いているという 事を表している.また,このとき車体はライダー頭部と同じ方向に傾くため,
車体を含めたバランス全体を見ても不安定な状態となり,極低速で走行するこ とが困難になっていると推測できる.
一方,熟練者は,位相遅れによる相関が見られなかったことから,ライダー 頭部の動きが車体の動きに影響を及ぼしていない事が考えられる.熟練者は,
頭部のロールを車体の傾きに影響させないことによって,ライダー-車体全体 のロール方向のバランスの乱れを発生させない動作をおこなっているものと考 えられる.
以上から,ライダー頭部のロール挙動を車体ロールに影響させないことは,
ライダー-車体のバランスシステムの乱れを発生させないための動作として有
効であると考えられる.ただし,この初級者における位相遅れのタイミングは
ライダー個人や経験により異なる事が考えられるため,今後多くのライダーの
データを収集することによって確認をおこなう必要がある.
III.5. 第Ⅲ章の結論
本章では,ライダー頭部と車体のロール角速度の関係性を検討するために相 互相関を用い分析をおこなった.その結果,初級者においてはライダー頭部の ロ ー ル 動 作 に 対 し 車 体 の ロ ー ル 挙 動 が 0.14 秒 の 遅 れ を 発 生 し て お り , ライダー頭部のロール動作が車体ロール挙動を引き起こし,不安定なバランス 状態を発生させていることが確認できた.第Ⅱ章および第Ⅲ章で得られた結果 より,安定した一本橋走行をおこなっていくためには,ライダー頭部の急激な ロール動作を減らすとともに,頭部のロール動作を車体に対して影響を及ぼさ ないようにする操作や動作をおこなっていく事が有効な手段の一つであること が示唆された.
ただし,本結果は 2 名のライダーによるものであり,得られた特徴が個人差
から発生しているものか,初級者と熟練者の特徴であるのかが明確になってい
ない.したがって実験サンプル数を増やし,傾向の確認およびメカニズムの解
明をおこなっていく必要がある.
57
IV. 熟練度の違いによる動作特性比較実験 〜角速度成分比較〜
IV.1. 緒言
第Ⅱ章および第Ⅲ章では二輪車の一本橋走行中のライダー上体の動作および 車体の挙動を測定するために,ジャイロセンサを使用して初級者と熟練者の違 いを比較する方法を検討すると共に,解析方法の検討も実施した.
その結果から,初級者と熟練者の挙動の特徴としてライダーおよび車体の ロール角速度に変化の傾向が出ることが確認できた.ただし,第Ⅱ章,第Ⅲ章 で実施した実験は 2 名のライダーによる比較走行実験であったため,初級者と 熟練者の比較としては十分でないことが考えられる.また,初級者として解析 をおこなったライダーに関しては,一本橋走行の経験のある対象者であったた め,本来目的としていた熟練度の違いによる差は確認できているか十分に判断 できないという課題があった.
本章では上記課題に対応すべく,一本橋の走行経験が教習所の免許取得時以 外におこなっていないライダーと,一本橋の走行訓練を日常おこなっている企 業インストラクターを合わせた計 14 名による走行実験をおこなった.
また,本実験においては,よりライダーの上体の動きを明確にさせることを
目的とし,ハンドル転舵角とライダーのハンドルにかけている荷重およびリア
ブレーキの踏み込み荷重の測定をおこなった.この測定結果については第Ⅴ章
にて述べる.
IV.2. 実験装置
IV.2.1. 実験コースレイアウト,実験器具およびライダー保護装着具
二輪車の走行実験方法に関しては,第Ⅱ章で実施した実験コースおよび装置 を使用した.実験器具およびライダー保護装着具に関しては以下にリストを挙 げる.
<実験器具>
1) 大型自動二輪車排気量 750cc の二輪車 CB750(Honda 製)
定期的( 2 回以上 / 週)に本実験同走行の使用をおこなっているもの
転倒リスク軽減用バンパ装備( 2 輪教習所同仕様)
2) 走行用一本橋 3) ストップウォッチ
<ライダー保護装着具>
4) 胸背部プロテクタ 5) ヘルメット
6) 肘プロテクタ 7) 膝プロテクタ
8) ライディンググローブ
9) ライディングブーツ
59 IV.2.2. 計測機器
本実験で使用した計測機器を表 4-1 .に示す.ジャイロセンサおよび受信ソ フトウェアに関しては第Ⅱ章で示した仕様と同仕様の装置を用いて実験をおこ なった.
表 4-1.実験計測機器
機器名 メーカ 型番・品名
小型ワイヤレス
ジャイロセンサ ATR-Promotions inc. TSND 121 多機能センサ用
受信ソフトウェア ATR-Promotions inc. Sensor Controller ポテンショメータ 栄通信工業 HSM 12
歪みゲージ 東京計測研究所 FLK2-11
PC カードレコーダ ㈱デイシー DR-160S
IV.2.2.1. ポテンショメータ
ライダーのハンドル転舵角の測定にはポテンショメータ HSM 12 (栄通信工 業製)を用いた.センサの取り付けについては,図 4-1 .に示すように回転部 がハンドル回転中央部ステムホールに取り付くように,センサ本体を実験車両 のタンク上部から専用の治具で確実に固定をおこなった.
図 4-1 .ポテンショメータ取り付け状態
61
ポテンショメータの 0 点位置の設定は,多関節三次元測定装置ベクトロン
VAR200L (株式会社小坂研究所製)を用い,車体の水平および垂直方向の軸を
合わせた状態で本体の固定をおこなった.ポテンショメータは 0 V を中心に角
度 ± 22.5 ° / V および,サンプリング周波数 100 Hz でDC出力された.また,
右転舵時をプラス,左転舵時をマイナスとなるように取り付けた.出力された データは PC カードレコーダ DR - 160S ( デイシー製 )で PC カードに記録し CSV に変換し解析用 PC に取り込んだ.表 4-2 .にポテンショメータの仕様を 示す.
表 4-2 .ポテンショメータ HSM12 型
[1]機械的回転角 360 °
電気的有効回転角 ± 45°
印加電圧 DC5V ± 10 %
負荷抵抗 10kΩ 以上
質量 約 15g
回転トルク mN ・ m
IV.2.2.2. 歪みゲージ
ライダーのハンドル荷重およびリアブレーキの踏み込み荷重の測定には歪み
ゲージ: FLK2 - 11 (東京計測研究所製)を用いた.取り付け位置は図 4-1 .に
示すように実験車両のハンドルパイプ付け根付近およびリアブレーキ部ペダル の回転軸付近に接着剤で確実に固定した.
荷重の測定には S/N 比を小さくするために 2 アクティブゲージ法を用いた
( 図 4-2 .)
[2].
63
図 4- 2 . 2 アクティブゲージ法
ハンドル上下方向の荷重測定として,左右のハンドル付け根の上部と下部に 歪みゲージを取り付けた.ハンドル左側に下方,ハンドル右側に上方の力が発 生する状態をプラス荷重とし,ハンドル左側に上方,ハンドル右側に下方の力 が発生する状態をマイナス荷重と設定した.
ハンドル前後方向の荷重測定として左右のハンドル付け根の前部と後部に歪 みゲージをそれぞれ取り付けた.ハンドル右側に前方,ハンドル左側に後方の 力が発生する状態をプラス荷重とし,ハンドル左側に前方,ハンドル右側に後 方の力が発生する状態をマイナス荷重と設定した.
本実験においてサンプリング周波数は 100 Hz ,測定レンジを 1000 μst とし,
gf / μst で PC カードレコーダに出力された.
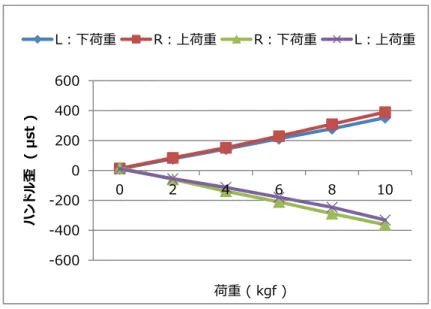
歪みゲージの校正はゲージを取り付けた状態でハンドル左右端にプシュプル
ゲージを用い上下方向,左右方向それぞれに 2kgf , 4kgf , 6kgf , 8kgf , 10kgf
の荷重をかけ校正をおこなった.上下方向荷重の校正データを図 4-3 .,前後方
向荷重の校正データを図 4-4.,リアブレーキ踏み込み荷重の校正データを
図 4-5 .にそれぞれ示す.上下荷重,前後荷重,ブレーキ荷重いずれも線形を
示し,測定精度の確認ができた.
図 4-3 .ハンドル上下荷重 校正グラフ
図 4-4 .ハンドル前後荷重 校正グラフ
-600 -400 -200 0 200 400 600
0 2 4 6 8 10
ハンドル歪(µst)
荷重 ( kgf )
L:下荷重 R:上荷重 R:下荷重 L:上荷重
-600 -400 -200 0 200 400 600
0 2 4 6 8 10
ハンドル歪(µst)
荷重 ( kgf )
L:押し荷重 R:引き荷重 R:押し荷重 L:引き荷重
65
図 4-5 .リアブレーキ踏み込み荷重 校正グラフ
0 50 100 150 200
0 2 4 6 8 10
ブレーキペダル歪(µst)
荷重 ( kgf )
IV.3. 実験方法
実験時のライダー走行条件およびデータの測定方法に関しては第Ⅱ章で実施
しⅡ. 4 で示した方法と同条件とした.
67
IV.4. ライダー
IV.4.1. ライダー特性
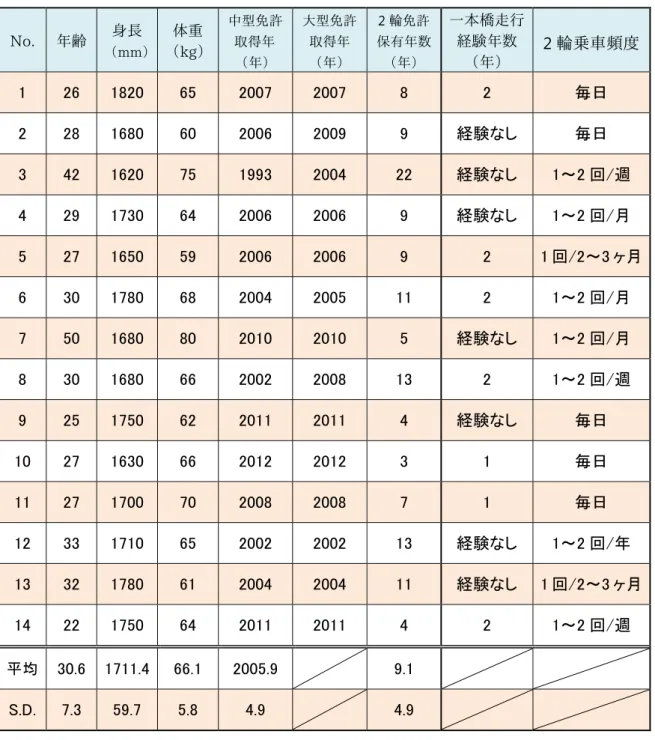
ライダーは大型二輪免許取得者男性 14 名で,平均年齢は 30.6 ± 7.2 歳,平
均身⻑は 171.1 ± 6.0 cm ,平均体重は 66.1 ± 5.8 kg , 2 輪免許取得からの平
均保有年数は 9.1 ± 4.9 年であった.企業内で二輪車インストラクターとして 一本橋走行の訓練経験のあるライダー(経験者)と二輪免許取得講習以降一本 橋走行の経験の無いライダー(未経験者)と 7 名ずつとした.
表 4-2.にライダーの特性を示す.
表 4-2 .ライダー特性
No. 年齢 身⻑
(mm)
体重
(kg)
中型免許 取得年
(年)
大型免許 取得年
(年)
2輪免許
保有年数
(年)
一本橋走行 経験年数
(年)
2輪乗車頻度
1 26 1820 65 2007 2007 8 2 毎日
2 28 1680 60 2006 2009 9 経験なし 毎日
3 42 1620 75 1993 2004 22 経験なし 1~2 回/週
4 29 1730 64 2006 2006 9 経験なし 1~2 回/月
5 27 1650 59 2006 2006 9 2 1 回/2~3 ヶ月
6 30 1780 68 2004 2005 11 2 1~2 回/月
7 50 1680 80 2010 2010 5 経験なし 1~2 回/月
8 30 1680 66 2002 2008 13 2 1~2 回/週
9 25 1750 62 2011 2011 4 経験なし 毎日
10 27 1630 66 2012 2012 3 1 毎日
11 27 1700 70 2008 2008 7 1 毎日
12 33 1710 65 2002 2002 13 経験なし 1~2 回/年
13 32 1780 61 2004 2004 11 経験なし 1 回/2~3 ヶ月
14 22 1750 64 2011 2011 4 2 1~2 回/週
平均 30.6 1711.4 66.1 2005.9 9.1
S.D. 7.3 59.7 5.8 4.9 4.9


![表 2-3 .ジャイロセンサの測定精度 [4 ] 測定項目 測定レンジ 分解能 出⼒単位 加速度 ±2G 0.06mG 0.1mG ±4G 0.12mG ±8G 0.24mG ±16G 0.48mG 角速度 ±250deg/s 0.008deg/s 0.01deg/s ±500deg/s 0.015deg/s ±1000deg/s 0.030deg/s ±2000deg/s 0.061deg/s 測定項目 サンプリング周期 最大周波数 平均化回数 メモリ記録](https://thumb-ap.123doks.com/thumbv2/123deta/6069638.2079552/27.892.121.788.145.784/ジャイロセンサレンジ分解能加速度角速度サンプリング最大周.webp)