1
令和元年度 修士学位論文
RC ドップラレーダを用いたハンドドリル先端
モニタリングシステムに関する研究
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
指導教員 三輪 空司 准教授
学籍番号 T181D037 高根沢 彰兵
2 RC ドップラレーダを用いたハンドドリル先端 モニタリングシステムに関する研究
目次
第 1 章 序論 4 第 2 章 ドリル先端モニタリングレーダ基本概念 6 2-1 ドリル先端モニタリングレーダ基本概念 6 2-2 ネットワークアナライザによる基礎実験 10 2-2-1 アンテナ回転操作基礎実験 12 2-2-2 ドリル進展モニタリング基礎実験 15 第 3 章 数値電磁界解析(FDTD 法) 17 3-2 ドリル回転時における数値シミュレーション 19 3-3 ドリル進展時における数値シミュレーション 21 第 4 章 商用パルスレーダを用いた実証実験 24 4-1 商用レーダ概要 24 4-2 アンテナ回転走査実証実験 25 4-2-1 計測状況 25 4-2-2 計測結果 25 4-3 ドリル進展モニタリング実証実験 27 4-3-1 計測状況 27 4-3-2 計測結果 28 第 5 章 ハンドドリル先端モニタリングレーダシステム 33 5-1 等価サンプリング原理 33 5-2 計測システム 36 5-3 レーダのインパルス応答とダイナミックレンジ 40 第 6 章 ハンドドリル先端モニタリングレーダの実証実験 43 6-1 アンテナ回転操作の実証実験 44 6-1-1 計測状況 44 6-1-2 計測結果 45 6-2 ドリル進展モニタリングの実証実験 51 6-2-1 計測状況 513 6-2-2 計測結果 53 第 7 章 ドップラフィルタリング 57 7-1 ドリルの振動を用いたドリル反射波抽出の原理 57 7-2 リアルタイムドリル振動周波数抽出 63 7-3 リアルタイムでのドップラフィルタリング原理 65 7-4 リアルタイムドップラフィルタリング 68 第 8 章 結論 73 8-1 結論 73 8-2 今後の課題 75 参考文献 76 謝辞 76 研究業績 77 研究発表 77
4
第 1 章 序論
近年、高度経済成長期に建設された RC(鉄筋コンクリート)構造物の老朽化が急速に 進行している。RC 構造物のリニューアル工事では、コンクリートを鋼材で補強するの にコンクリート内にネジを固定する等のアンカー取り付け作業が頻繁に行われる(Fig. 1-1)。その際、既設鉄筋を損傷してしまう事故が問題となっている。 これまでは、既設鉄筋の探査装置として Fig. 1-2 の RC レーダを使用した事前の配筋 調査後に穿孔を行っていた。配筋調査には主に RC レーダが用いられている。RC レー ダでは深さ 10 cm 程度の鉄筋は容易に検出可能であるが、例え配筋がわかっていたと しても不注意によって鉄筋を損傷してしまう例や、コスト重視のため事前調査を行わ ない例も多い。 現在、ドリルの使用者のニーズは以下の2 つである。 ・ドリルの穿孔中に、穿孔深さを把握しながらの穿孔を行ない、埋設鉄筋と衝突寸 前で、ドリルが自動停止するようなシステム ・穿孔しているドリルの直下に鉄筋などの埋設物があるかどうかの判断 この背景、ニーズに対して本研究では、RC レーダでは検出対象でなかったドリルの先 端を検出対象とする従来にないアイデアを導入し、ハンドドリルの使用中にコンクリ ート内に侵入するドリルの刃や鉄筋を可視化できる補助レーダシステムを検討する。 Fig. 1-1 ハンドドリル使用時の様子 Fig. 1-2 RC レーダの使用の様子5 研究を始めるうえでの最初の課題は侵入するドリルのモニタリングであった。RC レ ーダはかぶりが浅ければ既設鉄筋を検出するのは比較的容易であるものの、アンテナ があるコンクリート表面から侵入するドリルをモニタリングすることはこれまで検討 されておらずアンテナ配置や形状を工夫する必要がある。従来 RC レーダは送受信アン テナ間隔を狭めたモノスタティック配置により送受信アンテナを一体とみなす配置に なっている。本研究ではそこに着目し、アンテナを送受信で分けるバイスタティック 配置によってドリルの刃がアンテナの間を穿孔可能である配置をとる。この配置を用 いることで、ハンドドリルの本体と一体化させることが可能になり、ドリルの先端の モニタリングできる可能性がある。本論文ではそれを数値解析や実験を通じて検証を 行っていくことでドリルの先端モニタリングの実証可能性を検討した結果を示す。 実験による検証のなかで、かぶりの浅い鉄筋でのドリルのモニタリングが困難であ るとわかった。そこで、ドリル自身の振動成分を利用したドップラフィルタリング法 も適用した結果も同時に示す。 次の課題は、鉄筋とドリルの相対位置関係の把握である。この配置で計測できるの は埋設された鉄筋の深さとドリルの侵入する深さのみである。この配置ではコンクリ ート内に埋設された鉄筋とドリルとの相対位置関係を得られない。そこでドリルの刃 を中心としてドリルと等距離に配置されたアンテナを用いてアンテナの回転走査をす ると、その間に計測されたレーダ波形にはドリルと鉄筋の位置関係を把握するための 情報が得られると考えた。そこでこちらも数値解析や実験を通じて検証を行っていく ことでアンテナの回転走査した際の鉄筋とドリルの相対位置関係の把握可能性を検討 した結果を示す。
6
第 2 章 ドリル先端モニタリングレーダ基本概念
2-1 ドリル先端モニタリングレーダ基本概念 ドリルの穿孔において鉄筋等の埋設物とドリルの刃の衝突回避のために必要な情報 は 2 つである。 ・埋設鉄筋等の深さとドリルの穿孔深さ ・ドリルと鉄筋の相対位置関係 これを同時に行うとすれば 3 次元イメージングを行いながらドリルを穿孔するとい ったことが予想されるが、リアルタイムで 3 次元イメージング行うことは現実的に難 しい。2 次元レーダ波形をリアルタイムで計測を行うことは可能であるが、レーダ波 形は一次元的な情報しか持っていない。リアルタイムでの計測のレーダ波形のみから 鉄筋深さに対するドリルの穿孔深さを知ることと、鉄筋に対するドリルの相対位置を 同時に把握することを可能にするようなアイデアが必要であった。 そこでまず、埋設鉄筋等の深さとドリルの穿孔深さをレーダで計測するためのアン テナ配置を検討した。RC レーダではよく送受信アンテナが一体化したものが主流であ る。本研究ではアンテナを送受信で分けることにより、アンテナ配置の自由度を高め た。電波はアンテナ間を最短距離で伝わり反射波として受信される。アンテナ間を最 短距離でドリルの反射波を受信したい。それにはアンテナ間にドリルを挟むような配 置をとることが望ましいと考えた。また、ドリルによる穿孔をより捉えやすいものに するためには深くなるドリルの刃の変化が遅延時間においてより大きくなるような配 置をとるべきである。そこで、アンテナ間の距離をなるべく短くしたような配置をと った。 すると、ドリル掘削中のレーダ信号には、Fig. 2-1-1 のように①アンテナ間を直接伝 わる直達波、②ドリルからの反射波、③鉄筋からの反射波の計、3 つの波が主に受信 されると予想される。 Fig. 2-1-2 のようにドリルが鉄筋の真上にあれば、Fig. 2-1-3 のようにドリルの進展に よって、②の波は到達時刻が遅れ、ドリルが鉄筋にぶつかったとき②と③の波が重な ることになる Fig. 2-1-1 ドリルの進展とレーダ波形送信アンテナ
①
受信アンテナ
②
③
ドリル
鉄筋
②
③
①
7 一方で 3 つのレーダ波形はレーダ波形内の 2 次元空間に現れるため、ドリルの深さ 方向には正しい情報が得られるが、鉄筋とドリルの位置関係を捉えることが出来な い。特に Fig. 2-1-4 のようにドリルの中心軸と鉄筋の位置がずれている場合も、同様な 波形となるため、ドリルの進展だけのレーダ波形を見るだけでは、衝突の有無は検出 できない。 そこで、ドリルを中心として等距離に配置した送受信アンテナ対、もしくは1対の アンテナを回転させながら得られるレーダ波形を並べると、アンテナと鉄筋までの反 射パスが変化し、鉄筋の反射の到達時刻は sin 状に変化することから、鉄筋とドリルの 相対位置を把握できると考えた。 Fig. 2-1-2 ドリルの進展毎にレーダ波形を並べたレーダプロファイル Fig. 2-1-3 アンテナの回転とレーダ波形
受信アンテナ
①
②
③
ドリル
鉄筋
②
③
送信アンテナ
①
Fig. 2-1-4 アンテナの回転ごとに得られたレーダ波形を並べたレーダプロファイル ア ンテナ回転方 向 ③鉄筋が真下になけれ ばアンテナ方向により 正弦的に動く ②アンテナの中心にド リルがあれば動かない8 この 2 つの方法を用いることで、ドリルの直下に鉄筋があるか否かの判断が可能で あり、もし、鉄筋がドリルの直下にある場合も、ドリルの侵入する深さを捉えること が可能であり、鉄筋との衝突回避に利用出来ると考えられる。 以上のアイデアを基にした補助レーダシステムの最終的な形状を Fig. 2-1-5 示す。ア ンテナは回転を模擬し、ドリルの周りを取り巻くようにアレイ状に配置されている。 ドリルの穿孔中、一対になったアンテナが両端に配置されていることにより鉄筋な どの埋設物の深さとドリルの進展していき徐々に深くなる様子が確認でき、ドリルの 深さを検知することが可能である。これを x 方向の情報であるとすると、Fig. 2-1-6 に 示すようにアンテナをアレイ化することによりドリルをまたぐようにあらゆる角度で 鉄筋の位置が検知可能でありドリルに対する相対的な位置関係である y 方向の情報も 同時に取得することが可能になる。この概念によって取得されるレーダ波形例を Fig. 2-1-7 に示す。図よりリアルタイム計測のレーダ波形から疑似的に 3 次元のリアルタイ ムモニタリングが可能になると考えられる。そこで本論文ではその前段階として 2 つ の操作の独立した実証検証を行なう。 Fig. 2-1-5 ドリル進展モニタイングレーダの最終的な形状 送信 受信 アレイアンテナ対 Fig. 2-1-6 ドリル進展モニタリングレーダの概念図
9
10 2-2 ネットワークアナライザによる基礎実験 そこで、ドリルによる鉄筋コンクリート穿孔時のドリルの先端モニタリングの可能 性を本研究室で所持する既存のレーダシステムにより実験的に検証する。検討項目は 以下の 2 点である。 ①パターン 1 のアンテナの回転ではドリル前方に鉄筋があるかどうか? ②パターン 2 のドリルの進展ではドリルが鉄筋に当たる様子が見られるかどうか? 今回、Fig. 2-2-1 に示すベクトルネットワークアナライザを用いて実験を行う。また 小型アンテナとしてボウタイスロットアンテナを試作した。Fig. 2-2-2 にアンテナの周 波数特性を示すが、2~8 GHz 程度までほぼフラットな特性となっている。 Table. 2-2-1 にネットワークアナライザの設定値を示す。周波数は 0.3 から 9.3 GHz ま での周波数を 151 点で挿引した。また、計測時間や SNR に依存する IF 帯域幅の設定を 100 Hz とした。尚、計測時間と SNR は IF 周波数にそれぞれ半比例、及び比例の関係に ある。以上の計測状況のもと二つの実験を行った。 Fig. 2-2-1 ネットワークアナライザ Table 2-2-1 ネットワークアナライザの設定値 計測パラメータ 𝑆21 Start 周波数[GHz] 0.3 end 周波数[GHz] 9.3 IF Bandwigth[Hz] 100 Points 151
11
Fig. 2-2-2 試作アンテナ
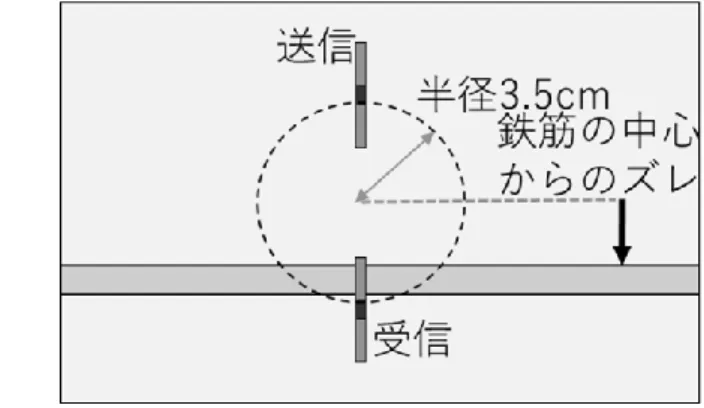
12 2-2-1 アンテナ回転操作基礎実験 まず、アンテナの回転により、ドリル直下に鉄筋がある場合とない場合の、レーダ 波形の変化を確認するための基礎実験を行う。使用した鉄筋コンクリート供試体は 40 cm×40 cm×10 cm であり、4 本の D16 鉄筋が 10 cm 間隔に配筋されている。尚、鉄筋か ぶりは 4 cm である。 供試体の鉄筋直上に原点を設け、ドリル穿孔位置(送受信アンテナ中心位置)を鉄 筋の軸方向と直交する方向にオフセットさせる。送受信アンテナと回転中心との距離 を 3.5 cm、アンテナ間隔を 7 cm として、アンテナを 10 度づつ回転させながら、送受信 間の伝達特性を計測し、レーダ波形を取得した。 Fig. 2-2-5 にアンテナ回転時に得られるレーダ波形の計測結果を示す。尚、(a)~(d) はそれぞれ、鉄筋位置と回転中心のずれを 0 cm、2 cm、3 cm、4 cm としたときの結果 である。多くの粗骨材等から反射波と思われる不要反射波が重畳していることがわか る。図中の 1 ns 付近に得られるのはアンテナ間を直接伝う①の直達波である。また、 1.6 ns 付近に現れる反射波は③の鉄筋からの反射波であり、鉄筋ずれ 0 cm ではほぼ同 一時刻に表れている。一方、アンテナずれが大きくなるにしたがって、鉄筋反射波の 到達時刻が正弦的に変化していることがわかる。尚、2.3 ns 付近の反射波は供試体底面 からの反射波である。 Fig. 2-2-5 実験状況
13 視覚的にはずれを評価するのに不十分なため、Fig. 2-2-6 に鉄筋反射波の到達時刻の 回転角依存性を示す。ずれ 0 cm ではほぼ 1.55 ns 付近で一定であるが、それ以外では概 ね 180 度を1周期とする正弦的な変動が見られていることがわかる。理論的には、ず れが大きいほど、この正弦変動の振幅も大きくなるはずであるが、2 cm から 4 cm では 明瞭な変動振幅の違いは実験的には見られなかった。これは、粗骨材等のランダムな 不要反射波が鉄筋反射波に重畳し到達時刻の誤差となったものと思われる。実験的に 正弦変動の大きさからずれを推定するのは困難であるが、2 cm 以上のずれは識別可能 であり、アンテナを回転させることにより、ドリル先端が鉄筋に当たるかどうかの判 断が実験的に可能であることがわかった。 (a) 鉄筋ずれ 0cm (b) 鉄筋ずれ 4cm Fig. 2-2-5 実験結果
14 Fig. 2-2-6 鉄筋反射波の到達時刻の回転角依存性 0 30 60 90 120 150 180 1.5 1.55 1.6 1.65 1.7 1.75 鉄筋からのずれ0cm 回転角 [度] 遅延時間 [ns ] 0 30 60 90 120 150 180 1.5 1.55 1.6 1.65 1.7 1.75 鉄筋からのずれ2cm 回転角 [度] 遅延時間 [ns ] 0 30 60 90 120 150 180 1.5 1.55 1.6 1.65 1.7 1.75 鉄筋からのずれ3cm 回転角 [度] 遅延時間 [ns ] 0 30 60 90 120 150 180 1.5 1.55 1.6 1.65 1.7 1.75 鉄筋からのずれ4cm 回転角 [度] 遅延時間 [ns ]
15 2-2-2 ドリル進展モニタリングの基礎実験 次に、ドリル進展におけるドリルがコンクリートを穿孔開始から鉄筋に衝突するま での様子をレーダ波形から確認するための基礎実験を行った。使用したコンクリート 供試体は前節と同様である。 ドリルにはブラシレスハンマドリルを用い、ドリルビットは径 6 mm のコンクリート 用ドリルビットを使用した。鉄筋直上に深さ 0~5 cm の穴を深さ 1 cm 毎に別の位置に あらかじめ開けておき、ドリルを孔に挿入してレーダ計測を実施する。アンテナは各 孔をドリル軸とし、それに対象な位置にアンテナ間隔 7 cm として固定している。 Fig. 2-2-8 にドリル進展時のレーダ波形の計測例を示す。まず、ドリルの位置が 0 cm のとき回転時同様 1 ns に①の直達波が確認出来る。しかし、直達波はドリルの位置が 変化することで振幅に変化が見られ、徐々に小さくなっている。また、深さごとに異 なる孔での計測であり、ドリルで掘りながら計測した結果ではないため、粗骨材等の 不要反射波の影響は孔ごとにランダムであり、鉄筋の反射は不明瞭であるが、先ほど と同様 1.55 ns 付近に現れる波は鉄筋からの反射波である。したがって、それより早く 到達する反射波があればドリルからの反射波であると考えられる。図より、波形に何 らかの変化は見られるが、ドリル径が細いためか、ドリル進展に伴うドリルの反射波 は不明瞭であることがわかった。パターン 1 のアンテナの回転により、鉄筋の正弦的 な変化を捉えることが可能なことが確認された。また、パターン 2 のドリルのコンク リー中への進展によって鉄筋反射以前に変化を確認出来た。この変化はドリルによる 可能性があるため、レーダとドリルの関連性を原理的に知りたい。そこで、次章では 数値電磁界シミュレーションを用いることにより評価を行なっていく。 Fig. 2-2-7 実験状況 0~5cm間、それぞれドリルの刃が 止まった状態で測定
16
Fig. 2-2-8 ドリル進展を模擬したレーダ波形の計測例
経過時間 [ns]
17
第 3 章 数値電磁界解析(FDTD 法)
本章ではドリルによる鉄筋コンクリート穿孔時のドリルのレーダモニタリングの可 能性を数値電磁界シミュレーションにより検証する。検討項目は以下の2点である。 ① パターン 1 の基礎実験より確認された波形の変化はシミュレーションでも抽出可 能か? ② パターン 2 の基礎実験で確認された波形の変化の要因が何か? 数値解析手法には有限時間差分(FDTD)法を用いた。FDTD 法は電磁波伝搬問題の 最も一般的な数値解析法であり、関心領域を直方体のボクセルで区切り、各ボクセル の辺に電界、面の法線方向に磁界を割り当て、差分化したマックスウエルの方程式を もとに、電界、磁界の時間発展を交互に解いていく計算手法である。Fig. 3-1-1 に解析 におけるのモデリングを示す。計算領域は 200×200×150 セルの空間であり、1 セル 2 mm とした。また、計算領域周囲は 8 層の PML 吸収境界条件を用いている。アンテナ は長さを 4 cm の電気ダイポールである。実験時同様アンテナ給電点間隔は 7 cm であ り、アンテナ軸がアンテナ中心方向を向けた。コンクリートは比誘電率 9、導電率 0 と し、半無限空間に配置している。鉄筋は径 1.5 cm の金属円柱を仮定し、鉄筋かぶりを 5 cm としている。また、Fig. 3-1-2 のようにアンテナの中心軸は鉄筋直上よりオフセッ トさせている。また、ドリルは径 0.6 cm の金属円柱としてモデル化した。 Fig. 3-1-1 解析空間の詳細 5cm 5cm 5cm 0~5cm 鉄筋:金属円柱,径1.5cm コンクリート:比誘電率 9,導電率0 20cm 10cm 40cm 40cm ドリル:金属円柱, 径0.6cm 2cm18
19 3-1 ドリル回転時における数値シミュレーション まず、パターン1の検討として、ドリル先端のコンクリート内への侵入長を 2 cm と し、Fig. 3-2-1 のようにドリル軸とアンテナ位置にオフセットを与え、アンテナをドリ ル軸を中心として回転させたときのレーダ波形の計算結果について述べる。 Fig. 3-2-2 に計算結果を示す。縦軸は、アンテナの回転角であり、計算により得られ るレーダ波形を角度毎に縦に並べている。図より、予想される①直達波や②ドリルの 反射波、③鉄筋反射波が明瞭に得られており、5 cm 程度の大きさのアンテナにより、 3つの波を原理的に分解できることがわかる。また、鉄筋ずれに対しては、(a)図の 2 cm のときは明瞭ではないが、3 cm、4 cm のずれでは、基礎実験時よりも明らかに明瞭 に鉄筋反射波の到達時刻に変化が見られている。 (a)鉄筋ずれ2cm (b) 鉄筋ずれ 3cm (c)鉄筋ずれ 4cm Fig. 3-2-1 鉄筋ずれの様子
2cm
3cm
4cm
(a) 鉄筋ずれ 2 cm (b) 鉄筋ずれ 3 cm (c) 鉄筋ずれ 4 cm Fig. 3-2-2 数値シミュレーションにおける回転角とレーダ波形 0 45 90 135 180 回転 角 [度 ] ① ② ③ 0 45 90 135 180 回転 角 [度 ] 0 45 90 135 180 回転 角 [度 ]20 これにより、仮定が原理的に検証できたといえる。また、ドリルの反射波の大きさ は回転によって変化していないが、鉄筋の反射波の大きさはやはり周期的に変化する こともわかる。これは、アンテナがドリルの方向に向いており、アンテナの回転によ りドリルの相対位置は不変なものの、鉄筋については鉄筋軸とアンテナの軸が大きく 変化するためであると考えられる。
21 3-2 ドリル進展時における数値シミュレーション 次に、パターン 2 について検討する。まず、基礎実験同様かぶり 5 cm の鉄筋直上に ドリルを設け、アンテナを固定した。そこで、ドリルの先端がコンクリート表面にあ る状態と、ドリルの先端が 0~5 cm まで穿孔していく間、穿孔間隔 2 mm 刻みで 24 ポ イント波形を取得した様子を電磁界シミュレーションにおいて解析した。結果を Fig. 3-3-2、 Fig. 3-3-3 に示す。Fig. 3-3-2 はドリル先端が 0 cm の位置で静止しているときに得 られた単発のレーダ波形を並べた図であり、レーダプロファイルと呼ぶ。また Fig. 3-3-3 が、ドリル先端が徐々に深くなっていく間に得られたレーダプロファイルである。 静止状態のレーダプロファイルから 0.7 ns 付近にアンテナ間を直接伝わる①の直達波 が得られていることがわかる。また、1.4 ns で常に同じ遅延時間で反射する比較的大き い反射波は、かぶり 5 cm の鉄筋からの反射応答であると考えられる。一方で、穿孔を 行なった際の右のレーダプロファイルからは、基礎実験同様①の直達波は非常に小さ く確認出来ない。さらに、ドリルの先端が 1~4 cm にあるとき、粗骨材等の不要反射 波がないことで遅延時間の 0.5~1.3 ns にかけて反射波が遅延する様子が明瞭に確認出 来る。この波は浅いとき、直達波と同様なパスを通過するため、非常に小さい。 また、鉄筋に近づくと、鉄筋とドリルの反射波が重なるために、両波形の分離は困 難となっている。したがって、この反射波はドリルの先端からの応答であることが確 認された。 また、アンテナ間を伝う直達波はドリルが進展していくにつれて小さくなっていた。 これはドリルによって直接伝う電波が遮断される影響であると考えられる。
22 Fig. 3-3-2 数値シミュレーションにおける進展深さとレーダプロファイル 0 cm 0 cm 0 cm 0 cm 0 cm 0 cm
③
ド リ ル 侵 入 長①
Fig. 3-3-3 数値シミュレーションにおける進展深さとレーダプロファイル 0 cm 5 cm 1 cm 2 cm 3 cm 4cm②
③
ド リ ル 侵 入 長①
23 ここで、図中の点線は Fig. 3-3-1 の解析時の幾何学的環境から、仮想的なドリルの先 端の穿孔軌跡を算出したものである。まず、ドリル先端の最終計測位置から 5 cm で鉄 筋位置に到達すると考えられる。また、計測環境からアンテナ給電点間隔 7 cm、鉄筋 かぶり 5 cm、コンクリート内の比誘電率を 9、ドリルによる穿孔が等速であると仮定 したときドリル先端波形到達時間,ドリル先端深さ,送受信アンテナ給電点間,コンクリ ート中の伝搬速度とすると、ドリル先端反射波の到達時間は式(3-1)で表される。
𝑡 =
2√( 𝑟 2)2+𝑥2 𝑣 (3-1) これをレーダプロファイルに重ねた。図より、ドリルの先端軌跡と同じ位置からドリ ルの反射波が確認されることからもドリルの反射波はドリル先端からの反射波である といえる。 以上より、原理的なレーダを用いたドリルのレーダモニタリングの可能性が示唆さ れる結果となった。基礎実験時にドリル先端からの反射波が捉えられなかった原因と して、0~5 cm のドリルの進展を 1 cm 刻みで計測を行なっていたため、分解能が不足 していたからであると考えられる。 Fig. 3-3-1 幾何学的環境Xcm
アンテナ
給電点間隔
7cm
かぶり5cm
3.5cm
24
第 4 章 商用パルスレーダを用いた実証実験
基礎実験、数値電磁界解析より、ドリルの穿孔を捉えるためには 2 mm/回の計測が 最低限必要であると考えられる。ドリル先端は 3 cm/s 程度で穿孔される。よって最低 0.06 秒に 1 回波形を計測可能な高速に波形を取得出来るパルスドップラレーダ装置が 必要となる。そこで市販の RC パルスレーダシステムを用いて実験を行なう。 4-1 商用レーダ概要計測機器は Fig. 4-1-1(a)に示す GSSI 社製の RC レーダ SIR-4000 を用いた。性能は 1 トレースにつき、256 ポイントのサンプル点数のレーダ波形を、最大 400 Hz の繰り返 し周波数で取得できる。尚、本レーダは波形表示部とパルス発生器を含めた小型アン テナ部が送受信で独立しており本計測に有効である。Fig. 4-1-1 (b)に実験に用いた 2 GHz 帯のアンテナを示す。本アンテナにより、かぶり厚約 25 cm までのコンクリート 中の鉄筋を探査が可能であり、アンテナについたタイヤの回転角によりパルスを発せ させることができる。一方、本システムは一定周期毎にレーダ波形を記録することも でき、この機能を用いて、送受信アンテナを 2 つ固定した状態で、コンクリートに対 しアンテナの間をハンドドリルによって穿孔する間、レーダ波形を内部メモリに記録 し、オフラインで PC に全波形を取り込み、解析することが出来る。 (a) レーダ制御表示部 (b) 2 GHz パームアンテナ Fig. 4-1-1 使用したコンクリートレーダ
25 4-2 アンテナ回転操作実証実験 4-2-1 計測状況 まず、パターン 1 のアンテナ回転操作の実証実験を行なう。計測状況を Fig. 4-2-1 に 示す。コンクリート供試体は基礎実験同様 40 cm×40 cm×10 cm であり、4 本の D16 鉄筋 が 10 cm 間隔に配筋されている。尚、かぶりは 4 cm である。商用レーダを用いてドリ ルを中心に送受信アンテナを配置する。このときアンテナの送受信間の距離は 11 cmと した。 供試体の鉄筋直上に原点を設け、ドリル穿孔位置(送受信アンテナ中心位置)を鉄 筋の軸方向と直交する方向にオフセットさせる。送受信アンテナと回転中心との距離 を 3.5 cm、アンテナ間隔を 7 cm として、アンテナを 10 度づつ回転させながら 36 点で のレーダ波形を計測した。また、アンテナを 10 度ずつ回転させながらアンテナ位置を 鉄筋の直上から 0~3 cm ずらした状態の 4 パターン計測を行なった。 4-2-2 計測結果 計測結果を Fig. 4-2-2 に示す。図は直上から 0~3 cm ずらした状態の 4 パターン際の レーダ波形を横軸回転角に沿って並べたレーダプロファイルである。かぶり 4 cm から の鉄筋からの反射波は 1 ns に確認できる。しかし、鉄筋のオフセットが 0 cm である結 果において本来変化しないはずの鉄筋反射波がすでに正弦的に変化しているように見 えた。この現象はオフセットを大きくしても変わらず、変化の幅が大きくなるように も見えない。 この原因として、アンテナを回転させることでアンテナ間の偏波と鉄筋とが 90 度と Fig. 4-2-1 計測状況
26 270 度で直交するような配置をとる。商用 RC レーダのアンテナは自作したボウタイス ロットアンテナよりも大きい。そのため、アンテナ同士の給電点間の距離が変化し、 オフセットが 0 cm の場合でも鉄筋からの反射波が制限的に変化するように見えた可能 性がある。またその変化がオフセットよりも大きいため、商用レーダでは 0~3 cm ま での変化を捉えることが出来なかったと考えられる。 以上の結果より、商用パルスレーダを用いたアンテナ回転操作によって鉄筋直上か らのずれに応じた鉄筋反射波の正弦的な変化は確認できなかった。しかし、自作した ボウタイスロットアンテナを用いて行った基礎実験ではオフセットの大きさに沿って 波形の変化は大きくなった。また、オフセットが 4 cm の場合にはそれが正弦的な変化 をしていることも確認できた。そこでアンテナの回転操作にはアンテナサイズを最大 限小型化し、回転によってアンテナの給電点間の距離が変化しないアンテナを用いる 必要があることが実験により確認できた。 (a) オフセット 0 cm (b) オフセット 1 cm (a) オフセット 2 cm (b) オフセット 3 cm Fig. 4-2-2 アンテナ回転操作時レーダプロファイル
27 4-3 ドリル先端モニタリング実証実験 4-3-1 計測状況 次に、パターン 2 のドリル先端モニタリングの実証実験を行う。システムはパター ン1 同様商用レーダを用いる。供試体は 2 種類を用いた。Fig. 4-1-2 にその概要を示す。 まず、供試体1 は鉄筋かぶり 9 cm と比較的かぶりが深いのに対し、供試体 2 は鉄筋か ぶり4 cm の比較的かぶりの浅いコンクリートを準備した。鉄筋は D16 である。アンテ ナ配置は両者同様、アンテナ間を 5 cm とし、アンテナ間の中点になる位置を供試体 1 は中程度の駆動力で鉄筋の直上を、供試体 2 は強い駆動力で鉄筋の直上にならない位 置を鉄筋の深さまでそれぞれ計測した。従来までは供試体 2 のみのコンクリートでの 実験を行っていたのに対し、今回新たに供試体1 を準備した理由は、2 GHz 帯のアンテ ナの使用により、より深い位置の計測が可能になったからである。また、穿孔するド リルの刃の径を6、8、10、12、14、18 mm の 6 種類を用いた。 パルスレーダの測定条件は、サンプル数 256 点/トレース、トレース数は毎秒 400 ト レース、測定レンジを 4 ns とし、ドリルの穿孔中である 20~30 s の間波形を取得し続 けた。 (a) 供試体概要(左 供試体 1 右 供試体 2) (b) 供試体(左 供試体 1 右 供試体 2) Fig. 4-1-2 計測環境
5cm
5cm
28 4-3-2 計測結果 Fig. 4-2-1、Fig. 4-2-2 に各ドリルの径、供試体におけるレーダ波形を計測時間方向に 並べたレーダプロファイルを示す。これらの波形は複素振幅であり、結果には包絡線 波形を示している。Fig. 4-2-1 は供試体 1 の結果であり、ドリルの径 6 種類での波形を それぞれ示している。波形から1 ns 付近にアンテナ間を伝う直達波、2 ns 付近にコンク リート内部鉄筋反射が確認でき、ドリルの径が 6,8,10,12,14,18 mm でそれぞれ, 5 s,7 s、17 s、17 s、20 s、30 s 付近から、それぞれの計測時間レーダ波形において深さ 方向に反射波の遅延が確認できる。ここでもドリルの先端反射波の到達時間を黒点線 で示している。この波形とドリル先端からの反射波が概ね重なることからも、ドリル 先端からの反射波をレーダにより計測可能であることが確認された。また、ドリルの 径によって振幅が最大約1.2 と 6 つの結果において大きな変化がないことから、ドリル の径はドリル先端反射波に寄与しないこともこの波形からわかる。 (a) ドリル径 6 mm (b) ドリル径 8 mm (c) ドリル径 10 mm (d) ドリル径 12 mm
29 次に、Fig. 4-2-2 は供試体 2 の結果であり、ドリルの径 10 mm で、数 cm 穿孔を行っ た際の結果である。Fig. 4-2-1 同様にアンテナ間を伝う直達波が 1 ns に確認でき、2 ns 付近にはコンクリート内部の鉄筋からの反射波を確認できる。しかし、ドリルの刃の 進展の様子をこのレーダプロァイルからは確認できない。原因としては、供試体 1 で はドリル先端がある程度深くなって以降ドリル先端からの反射波と直達波が分離する 様子が確認される。しかし供試体 2 では穿孔深さが浅いため変化を確認できなかった ものと考えられる。 (e) ドリル径 14 mm (f) ドリル径 18 mm Fig. 4-2-1 市販レーダ実験結果(供試体 1) (g) ドリル径 10 mm Fig. 4-2-2 市販レーダ実験結果(供試体 2)
30 そこで、直達波を波形から取り除くため全レーダ波形から 0 s のレーダ波形を基準 波形として減算したものをFig. 4-2-3 に示す。また、Fig. 4-2-4 に移動平均減算処理を施 した波形を示す。これは直流成分を除去し、移動するドリル先端のみのレーダ波形を 抽出するものである。原理は、パターン 2 の計測時間方向 35 s あるレーダプロファイ ルから1.28 s のウインドウ幅内の 512 個のレーダ波形を抽出する。その平均を波形の中 心である 256 番目のレーダ波形から減算したものである。波形から、どちらの結果で も 1~2 ns にドリル先端からの反射波と考えられる成分が抽出されているが、SN 比が 悪く、この波形からドリルの軌道を確認することが困難な結果となった。 基準波形を減算すること、移動平均をとることは波形に対しハイパスフィルタをか けることと同じ意味を持つ。では、ドリルの先端反射波が実際にどんな周波数成分を もつのかを確認したい。そこで、ドリル先端からの反射波の成分を持つレーダ波形の Fig. 4-2-3 全レーダ波形から 0s のレーダ波形を減算 Fig. 4-2-4 移動平均減算処理
31 1.4 ns を波形取得時間方向にフーリエ変換した周波数スペクトルを Fig. 4-2-5 に示す。 すると 20 Hz にピークが確認できた。 使用するハンマドリルは DH36DPA であり構造を Fig. 4-2-6 に示す。まず、モータの 回転に対し、ピニオン・べベルギアを介してセカンドシャフトを回転させる。その 後、セカンドピニオン・セカンドギアを介してシリンダが回転し、ドリルを回転させ る。また、打撃については、レシプロベアリングを介して、ピストンを往復させ、空 気室を圧縮してストライカを飛ばすことにより、ドリルビットを打撃している。した がって、モータに起因する周波数としては ①ロータ回転成分: Hz ②1段目かみ合い周波数:× 6 ③打撃周波数:× 6/33(セカンドシャ フト回転周波数) ④2段目かみ合い周波数:× 6/33 × 9 ⑤ドリル回転周波数:× 6/33 × 9 等が挙げられ、満充電の場合、450 Hz で あることから、打撃周波数は 81.8 Hz、 回転周波数は 18.0 Hz と試算できる。こ の周波数は充電状況や負荷、トリガの強 さによっても変化する。よってこの成分は振動するドリルの成分であると考えられ る。 Fig. 4-2-5 Fig. 4-2-2 の 1.4ns を波形取得時間方向 にフーリエ変換した周波数スペクトル Fig. 4-2-6 ドリル構造
32 以上の結果より鉄筋深さがある程度深い位置にある場合ドリル先端からの反射波を レーダにより抽出可能であった。また、鉄筋位置が浅い場合、直達波とドリル先端反 射波が重なることによりドリル先端からの反射波をレーダ波形から確認することが困 難であった。レーダ波形からドリルの先端の反射波を抽出するために、いくつかの解 析手法を用いた。その中で、ドリルの振動成分を波形から抽出するドップラフィルタ リングが有効である可能性が示唆された。 一方、アンテナの回転操作の実験では商用パルスレーダの専用アンテナでは、アン テナサイズが大きく、アンテナの回転により数 cm のずれを波形からとらえることが困 難であった。そのため、アンテナサイズを小型化することが鉄筋とドリルの先端の位 置関係知るために必要であることがわかった。 商用パルスレーダはドリルの進展に対しては有効であり、アンテナ回転に対しては 不向きと相反する結果となった。ドリルの進展がモニタリング可能なレーダシステム と回転操作によって鉄筋とドリルの位置関係を把握することのできる小型なアンテナ を使用した自作の高速パルスレーダシステムの開発が必要である。 現状、ドップラフィルタリングはオフラインの処理に留まりレーダ時間波形から周 波数成分を抽出することでドップラの検出をしている。これでは実用性に欠ける。ド ップラ周波数を解析するのではなくドリル自身から抽出できれば、リアルタイムでの ドップラフィルタリングも行うことが可能になる。RC レーダでは柔軟性に欠けるため、 この処理をシステムに組み込んで行うことは難しい。その点からも自作のパルスレー ダの開発は必要である。 そこで、次章では試作したレーダシステムについて詳しく説明していく。
33
第 5 章 ハンドドリル先端モニタリングレーダシステム
ハンドドリル先端モニタリングレーダシステムの開発にあたり、主に高速レーダシ ステムと小型アンテナの開発が必要となる。まず、小型アンテナは既に基礎実験にお いて開発したアンテナを利用する。高速レーダシステムにおいては自作する必要があ るが FMCW 方式、パルスレーダ方式が挙げられる。20 Hz 程度の振動成分を取り出す ためには少なくとも秒間 100 波形を取得出来るレーダシステムを必要とする。FMCW 方式は比較的安価に作成できるもののレーダ波形を得るためにフーリエ変換を必要と するため、秒間 100 波形のリアルタイムの解析には DSP 等の専用ハードが必要になる 可能性があり、直接レーダ波形が得られるパルスレーダシステムが望ましい。そこで パルスレーダ方式の中でも高周波数のサンプリングを比較的容易に安価に行なうこと の可能な等価サンプリング方式を用いた高速パルスレーダのシステム開発を行なった。 5-1 システム概要 一般に GHz 帯の高周波信号を直接サンプリングする方式は高コストであり、SN 比 は低下するものの高速に変化する周期信号に対しその周期よりわずかに長い周期で低 速にサンプリングする等価時間サンプリング方式が一般的である。Fig. 5-1-1 に等価サ ンプリング方式の原理を示す。まず、レーダ波の周期波形の繰り返し周期を T とした とき、通常は T よりはるかに狭いサンプリング周波数を選ぶが、サンプリング周期を 𝑇 + 𝛿𝑇とすれば、2 回目のレーダ波の時刻𝛿𝑇の1ポイントがサンプリングできる。2 回 目のサンプリングの時刻 は2𝑇 + 2𝛿𝑇となり、このとき周期 T の波形の 2𝛿𝑇 のタイミン グがサンプリングされる。同様に、𝑛回のサンプリングでは 𝑛𝛿𝑇 のタイミングがサン プリングでき、𝛿𝑇を極めて小さく取れば、高周波信号が n 回のパルスで等価的にサン プリングできる等価サンプリングの周期𝑇’を𝑇 + 𝛿𝑇とすれば、𝑛(= 𝑇/𝛿𝑇)パルスの繰り 返しで T 秒分のレーダ波をサンプリング周波数 𝛿𝑇 でサンプリングできる。このとき、 レーダ波形は 𝑛 倍に時間が拡大される。n を 100000 とすれば、GHz 帯の信号が kHz 帯 の信号になり、容易にサンプリングできる。34 そこでシミュレーションを用いて等価サンプリングを原理的に行なうことが可能で あるか検証した。Fig. 5-1-2(a)は赤線の 200MHz の送信パルス列とそれと青線の少しず れた周波数 200.4 MHz の相関用パルス列を生成したものである。これは原理より𝑇 = 5 ns,𝑇’ = 5 − 0.01 ns = 4.99 nsである。Fig. 5-1-2(b)は赤線の送信パルスより受信された 受信パルス列と、相関用パルス列である。これは差分の周波数である 400 kHz の周期 で 1 波形分のポイントがカバーされ、500 パルスで 1 波形を生成する。そのため、実際 には2.5 μsの波形であるがその一部を表示している。次に、Fig. 5-1-2(c)は(b)の 2 つの波 形をミキシングした後の波形であり、この波形は𝑛 = 500であるので 5 ns の波形が 2.5 μsに引き延ばされて取得されている。Fig. 5-1-2(d)では実際の 5 ns の受信波形とサン プリング後の波形を重ねたものであり、GHz 帯の信号を kHz 帯でサンプリングするこ とが可能であることが確認された。 Fig. 5-1-1 等価サンプリング方式のパルスレーダシステム 送信パルス列 受信パルス列 相関用パルス列 低周波成分抽出 ミキシング結果 低速度でのサンプリング 4δT 3δT 2δT δT 5δT 送信パルスの周期より少し長い 波形の掛け算 積分処理 T 2T 3T 4T 5T
35 (a) (b) (c) (d) Fig. 5-1-2 等価サンプリングシミュレーション結果
36 5-2 開発システム 次に、Fig. 5-2-1 に実際に開発したパルスレーダシステムの概要を示す。 レーダパルスの繰り返し 周期は空間的なエイリアシングを 起こさないよう、実験環境 において計測される不要反射波のうち最も遅い到達時間より長く設定する必要がある。 本システムではアンテナをコンクリートに極めて近づけるため空中への不要放射が 抑 えられ、損失性媒質であるコンクリート内部(伝搬速度 10 cm/ns)を計測対象とするため、 5 ns(200 MHz)を繰り返し周期とした。パルス発生装置は 2 GHz までの繰り返し周波 数でパルス幅 0.1 ns の矩形パルスを生成可能な EPG-210 を用いた。これを Fig. 5-2-2 に 示す。 Fig. 5-2-1 パルスレーダシステム概要 パルス 発生器 AD変換 PRF2 : 199.999MHz パルス 発生器 5ns+δ PRF1:200MHz Tx Rx 5ns 5ns ns ns ns -40dB 26dB -8dB OCXO サンプリ ング ト リガ ー : 1 kH z 10 MHz LPF fc:1.9MHz ms ms Clock generator サン プリ ン グ ク ロ ッ ク : 2 5 0 k H z Att -10dB 22dB 0.3V Att -10dB 22dB PC Amp. Amp. Amp. 150 kHz Fig. 5-2-2 パルスジェネレータ
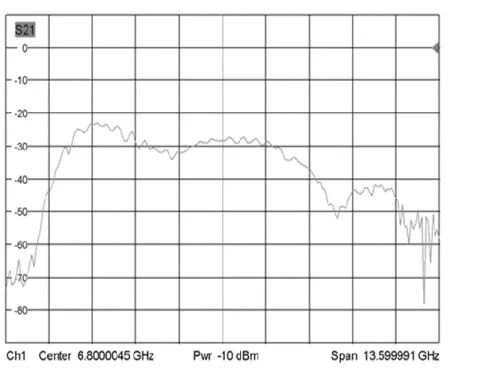
37 また、生成パルスの周波数特性をスペクトルアナライザで計測したものを Fig. 5-2-3 に示す。スペクトルアナライザの設定はスパン 199.95 MHz~200.05 MHz である。また、 IF を 100 Hz とした。図より 200 MHz に鋭いピークが確認できる。 生成されたパルスは送信アンプであるミニサーキット社のワイドバンドアンプ ZVA-183-s(Fig. 5-2-4) 送受信アンテナ、受信アンプであるミニサーキット社の低ノイズアン プ ZX60-83LN12+(Fig. 5-2-6)通過後、GHz 帯レーダ波形が等価サンプリングされる。 Fig. 5-2-3 送信用パルス波周波数特性 0 -60 -80 -100 -40 -20 P o w e r [ d B m ] Fig. 5-2-4 送信用アンプ Fig. 5-2-5 アンプ特性 (データシートより引用)
38 等価サンプリングは、繰り返し周波数 199.999 MHz のサンプリングパルスを用いる。 これを Fig. 5-2-4 同様スペクトルアナライザで周波数特性を計測し Fig. 5-2-8 に示す。 図より 199.999 MHz にピークが確認できる。また、サンプリングパルスは送信パルス と同形の矩形パルスで繰り返し周期が 1 ms 長い。 サンプリングパルスとレーダ波形をミキサ(Fig. 5-2-9)によりミキシングし、低周波成 分を 1.9 MHz をカットオフとするローパスフィルタ(Fig. 5-2-11)により取り出したのち、 AD 変換することで実現する。 Fig. 5-2-6 受信用アンプ Fig. 5-2-7 受信用アンプ特性 (データシートより引用) Fig. 5-2-8 相関用パルス波周波数特性 0 -60 -80 -100 -40 -20 P o w e r [ d B m ]
39 送信パルスはアンテナによりレーダ信号として受信された後,繰り返し周波数 199.999 MHz のサンプリングパルス(送信パルスと同形の矩形パルスで繰り返し周期 が 25 fs 長い)と波形の乗算(ミキシング)を行い、低周波成分を取り出す。回目のサ ンプリングパルスではレーダパルスに対し遅れるため、パルスにより 1 周期分 (5 ns) の レーダ波形が周期に引き伸ばされて生成される。本システムでは計測対象が損失性媒 質であるコンクリートであるため、可探距離を極めて短くでき、レーダパルスの繰り 返し周期を 5 ns (周波数 200 MHz) 程度に高速化させることで、従来のレーダに比べパ ルス繰り返し数を増加させ、SN 比を向上させた。また、低周波化により白色雑音電力 に比例する信号帯域幅も低下できる。AD 変換器は 12 bit であり、標本化周波数は 150 kHz であるため、1 波形は 150 ポイントで構成される。
ここで、AD 変換時の量子化 bit 数は 12 bit、サンプリング周波数は 150 kHz とした。 サンプリングパルスとレーダパルスの周波数差が 1 kHz であるため、5 ns の繰り返し周 期のレーダ波形が 1 ms の繰り返し周期に引き伸ばされてサンプリングされることにな る。このとき、1 波形を生成するには 200,000 個のレーダパルスが用いられており、レ ーダ波形の振幅が LPF の効果により積分され低周波化される。 Fig. 5-2-9 受信用 LPF
Fig. 5-2-10 受信用 LPF 特性 (データシートより引用) Fig. 5-2-11 等価サンプリング用ミキサ
40 5-3 レーダのインパルス応答とダイナミックレンジ Fig. 5-3-1 に本システムの完成図を示す。また、Fig. 5-3-2 に本システムにおいて、送 受信アンプ間に 40 dB の減衰器を直結させた応答特性を示す。図はレーダシステムの インパルスパルス応答からヒルベルト変換により複素レーダ波形を得た後、絶対値を 取った包絡線波形であり、横軸は 1 ms を 5 ns に換算している。パルス幅は 0.25 ns で あり、65 mV 程度のピーク電圧が計測された。 Fig. 5-3-1 レーダシステム全体図 Fig. 5-3-2 レーダインパルス応答
41 Fig. 5-3-3 にインパルス応答の周波数特性を示す。この特性は 1 ms の繰り返しパルス を 4 秒間計測し、4000 波形を同期加算することにより取得した。 帯域幅は 0.5~4 GHz 程度であり、RC レーダの信号帯域として一般に用いられる数 GHz の帯域をカバーし ている。また、信号レベルは−46 dBV であり、ダイナミックレンジの上限となる、ミ キサの飽和限界は−42 dBV であった。 また、本システムのダイナミックレンジの下限 は AD 変換器の白色雑音で決まり、現状の AD 変換器(Contec 社、AI-1204Z-PCI)で は、−132 dBV が白色雑音レベルと考えられる。 送受信アンテナを介した場合、アン テナの結合ロスや伝搬による減衰により、かぶり 4 cm の鉄筋の反射波は 40 dB 程度の 減衰を受けるため、鉄筋の反射波として 90 dB の SN 比が得られることがわかる。今 後、ミキサ後のローパスフィルタを 100 kHz 程度とし、AD 変換器をより低雑音にする ことにより 20 dB 程度の SN 比向上は可能である。 一般に、等価サンプリングシステムのノイズ源は AD 変換器のノイズに加え、パル ス発生器に入力する 200 MHz のクロック信号のジッタ―が影響する。特に、本システ ムではレーダパルスクロックとサンプリングパルスクロックは周期差が 25 fs と極めて 小さく、当初、予定していた PLL 回路を用いたクロック生成ではジッタ―が 25 fs に比 べて極めて大きかったため、タイミング誤差が繰り返し周期に蓄積され、レーダ波形 の繰り返し周期が大きくゆらぐなど安定したレーダ波形の取得は困難であった。そこ で、Fig. 5-3-4 に示した 1 kHz の周波数差を持ちつつ、90 fs 程度の超低ジッタを有する シリコンラボ社のクロックジェネレータ SI5340IC を用いてクロック生成することで高 速、高ダイナミックレンジなレーダシステムを実現した。 Fig. 5-3-3 パルス波形の周波数特性
42
43
第 6 章 ハンドドリル先端モニタリングレーダの実証実験
本章では、開発した等価サンプリングパルスレーダシステムを用いて、以下の項目を 実証するための実験を行なう ① パターン 1 のアンテナの回転ではドリル前方に鉄筋があるかどうか? ② パターン 2 のドリルの進展ではドリルが鉄筋に当たる様子が見られるかどうか? ①についてはネットワークアナライザを用いた基礎実験、FDTD 法を用いたシミュレ ーションにおいて検証を行なった。結果、シミュレーションにおいては鉄筋のズレが 3、 4 cm の場合、アンテナの回転操作によって鉄筋反射のみの正弦的な変化を捉えること が可能であった。また、基礎実験においても粗骨材等の不要反射波によってシミュレ ーションと比較すると不明瞭ではあった。しかし 3,4 cm の鉄筋のズレの場合の結果に おいて正弦的な変化を捉えることが可能であった。 また②については、①同様ネットワークアナライザを用いた基礎実験、FDTD 法を 用いたシミュレーションにおいて検証を行なった。基礎実験ではドリルの進展に伴い ドリルの刃の位置に対応する時間に何らかの波形の変化を捉えた。しかし、波形が不 明瞭かつ波形の取得回数が少なすぎることが原因でドリルの進展を捉えることが不可 能であった。一方、シミュレーションにおいてはドリルの進展をレーダ波形から明瞭 に捉えることが可能であり、且つその波形はドリルの刃の先端からの反射波であるこ とも確認された。そこでドリルの刃の進展速度 3 cm/s よりも早い速度で計測の行なう ことの可能である商用パルスレーダを用いて実証実験を新たに行なった。その結果、 鉄筋かぶりの深い 9 cm のコンクリートの結果ではシミュレーション同様ドリルの進展 に伴ったドリル先端からの反射波を捉えることが可能であった。しかし、鉄筋かぶり の浅い 4 cm のコンクリートの結果はドリルの穿孔深さが浅いこと、直達波とドリル先 端からの反射波が重なることによりドリルの進展を波形から捉えることは困難であっ た。そこで、開発したパルスレーダシステムにおいてリアルタイムにドップラの抽出 することで浅い鉄筋の供試体に対してもドリルの先端からの反射波の抽出を試みる。
44 6-1 アンテナ回転操作の実証実験 6-1-1 計測環境 開発したパルスレーダを用いてアンテナ回転操作の実証実験を行う。パルスレーダ の設定したパラメータを Table. 6-1-1 に示す。また、使用アンテナは基礎実験同様のボ ウタイスロットアンテナとし Fig. 2-2-3 にその特性を示す。 Fig. 6-1-2 に使用した供試体を示す。これも基礎実験同様形状は 40 cm×40 cm×10 cm で あり、4 本の D16 鉄筋が 10 cm 間隔に配筋されている。尚、鉄筋かぶりは 5 cm である。 その中の一本を基準とし直上に原点を設け、ドリル穿孔位置(送受信アンテナ中心位 置)を鉄筋の軸方向と直交する方向にオフセットさせる。送受信アンテナと回転中心 との距離を 3.5 cm、アンテナ間隔を 7 cm として Fig. 6-1-3 のように固定した、アンテナ を 5 度づつ回転させながら計測し、レーダ波形を取得した。 Table 2-2-1 ネットワークアナライザの設定値 送信パルス周波数 [MHz] 200 相関用パルス周波数 [MHz] 199.999 周波数差 [kHz] 1 Points 150 一回の計測に用いる波形数 120 計測回数 1 Fig. 6-1-2 使用した鉄筋コンクリート供試体
45 6-1-2 計測結果 計測結果を Fig. 6-1-4 に示す。結果の(a)~(d)でそれぞれ鉄筋直上からのずれ 0~4 cm を設けてある。まず 1 ns 付近に得られる成分は鉄筋からの反射波である。次に 7 ns 付 近に得られる成分はアンテナ間を直接伝う直達波である。次にそれぞれの波形に着目 すると鉄筋からのずれが 0 cm の場合の結果では鉄筋反射の到達時刻の変化は捉えられ なかった。これは、ずれが 1 cm の結果も同様に変化は大きくは捉えられなかった。し かし、ずれが 2 cm、3 cm、4 cm の結果からは鉄筋反射に明瞭な正弦的な変化が確認出 来た。また鉄筋反射波は鉄筋が直上からのずれに応じて到達時刻が遅れることも確認 された。振幅の大きさも鉄筋からのずれが大きくなると相対的に低下していくことも 同じく確認された。 Fig. 6-1-3 アンテナ固定 (a) オフセット 0 cm (b) オフセット 1 cm
46
(c) オフセット 2 cm (d) オフセット 3 cm
(e) オフセット 4 cm Fig. 6-1-4 レーダ波形
47 次に Fig. 6-1-5 はそれぞれの波形のレーダプロファイルである。まず 0,180 度の回転 角の場合、アンテナの向きは鉄筋と平行であり、最も大きく鉄筋からの反射波が得ら れると考えられる。また、90,270 度の回転角の場合、アンテナの向きは鉄筋と直行し ており、鉄筋反射波振幅は最も小さい。またこのときコンクリート底面からの反射波 が大きく確認された。 (a) オフセット 0 cm (b) オフセット 1 cm (c) オフセット 2 cm (d) オフセット 3 cm (e) オフセット 4 cm Fig. 6-1-5 レーダプロファイル
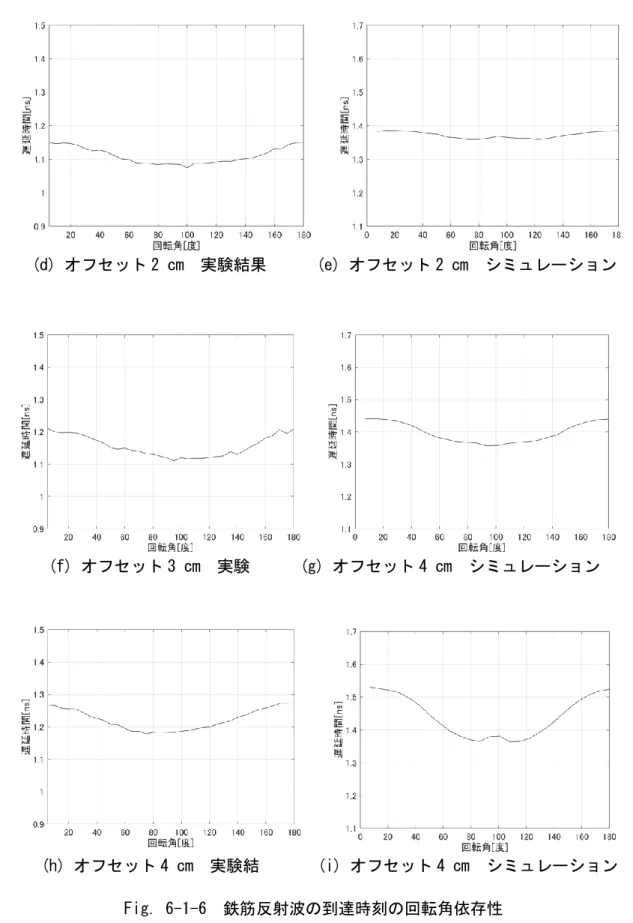
48 次に Fig. 6-1-6 の右にシミュレーションを行なった結果、鉄筋反射の到達時刻の回転 依存性を計算したものを示す。また、左には基礎実験同様、150 ポイントのレーダ波形 を 450 ポイントに補完しポイント数を増加させた。また、複素振幅にデータを変換し た。そこで、データの鉄筋位置にあたる到達時刻をデータの絶対値から計算した。す ると、シミュレーションでは、0 cm の鉄筋反射の到達時刻も 0.01 ns 変化することがわ かりほぼ変動しないことがわかった。2 cm では 0.05 ns 到達時刻が変化した。3 cm では 0.1 ns 変化し、最大ずれである 4 cm では 0.15 ns 変化し、変動の大きさは最大となった。 変動率は 5ns ごとに変化していることも確認出来た。また、実験では 0 cm の鉄筋反射 の到達時刻も 0.03 ns 変化することがわかった。1 cm では 0.04 ns 到達時刻が変化し、 変化が波形から確認可能であった 2 cm では 0.08 ns 到達時刻が変化した。3 cm では 0.1 ns 変化し、最大ずれである 4 cm では 0.11 ns 変化した。変動の大きさは 3 cm ではシミ ュレーションと等しくなり、2 cm ではシミュレーションよりも大きく、4 cm ではシミ ュレーションよりも小さくなった。この原因として、アンテナと鉄筋の偏波の関係に より、到達時刻が変化したと考えられる。しかし、変動が正弦的であること、鉄筋直 上からのずれが大きくなるにつれて変動が大きくなることが確かめられた。 (a) オフセット 0 cm 実験結果 (b) オフセット 0 cm シミュレーション (c) オフセット 1 cm 実験結果
49
(d) オフセット 2 cm 実験結果 (e) オフセット 2 cm シミュレーション
(f) オフセット 3 cm 実験 (g) オフセット 4 cm シミュレーション
(h) オフセット 4 cm 実験結 (i) オフセット 4 cm シミュレーション
50 最終的にはアンテナの回転操作を実行しながらのドリルの進展モニタリングを行い たいと考えている。実健結果からアンテナの回転によってドリル直下に鉄筋ないと判 断するためには 0.05 ns 以上の正弦変動が必要であると考えられる。そこで、0.05 ns 以 上鉄筋反射に変化があるときをドリルの直下に鉄筋がないと判断する。また、ドリル の進展モニタリングとアンテナ回転操作を同時に行うことを想定したとき、鉄筋との オフセットが最大の 4 cm の場合、正弦変動は 0.15 ns でありドリルの反射波には影響し ない位置で反射波が変動すると考えられる。よってアンテナの回転によりドリル直下 に鉄筋があるかないかの判断は可能であり、ドリル進展モニタリングとの併用も可能 であることが示唆された。
51 6-2 ドリル進展モニタリングの実証実験 6-2-1 計測条件 次にドリルの進展モニタリングの実証実験を行う。パルスレーダの設定したパラメ ータを Table. 6-2-1 に示す。また、使用アンテナはと同じものを使用した。供試体は 2 種類を用いた。Fig. 6-2-2 にその概要を示す。まず、供試体 1 は鉄筋かぶり 9 cm と比較 的かぶりが深いのに対し、供試体2 は鉄筋かぶり 4 cm の比較的かぶりの浅いコンクリ ートを準備した。鉄筋はD16 である。アンテナ配置は両者同様、アンテナ間を 7 cm と し、供試体 1 ではアンテナ間の中点になる位置で鉄筋の直上から少しずれた位置を鉄 筋の深さまで計測し、供試体 2 では鉄筋の直上を、鉄筋の深さまでそれぞれ計測し た。また、穿孔するドリルの刃の径を6、8、10、12、14、18 mm の 6 種類を用いた。 Table 2-2-1 ネットワークアナライザの設定値 送信パルス周波数 [MHz] 200 相関用パルス周波数 [MHz] 199.999 周波数差 [kHz] 1 Points 150 一回の計測に用いる波形数 120 計測回数 200
52
(a) 実験状況(左 供試体 1 右 供試体 2)
(b) 供試体(左 供試体 1 右 供試体 2) Fig. 6-2-1 実験の様子
53 6-2-2 計測結果 Fig. 6-2-2、Fig. 6-2-3 に各ドリルの径、供試体におけるレーダ波形を計測時間方向に 並べたレーダプロファイルを示す。Fig. 6-2-2 は供試体 1 の結果であり、ドリルの径 6 種類での波形をそれぞれ示している。波形から0.7 ns 付近にアンテナ間を伝う直達波、 2 ns 付近にコンクリート内部鉄筋反射が確認でき、ドリルの径が 6,8,10,12,14, 18 mm でそれぞれ,5 s,7 s、4 s、6 s、10 s、7 s 付近から、それぞれの計測時間レーダ 波形において深さ方向に反射波の遅延が確認できる。これはドリル先端からの反射波 であり、レーダによりドリル先端のモニタリングが可能であることが確認された。 また、ドリルの径によって振幅が最大約0.015 と 6 つの結果において大きな変化がな いことから、ドリルの径はドリル先端反射波に寄与しないこともこの波形からわかる。 (a)ドリル径 6 mm (b)ドリル径 8 mm (c)ドリル径 10 mm (d)ドリル径 12 mm
54
(e)ドリル径 14 mm (f)ドリル径 18 mm Fig. 6-2-2 供試体 1 計測結果
55 次に、Fig. 6-2-3 は供試体 2 の結果であり、ドリルの径 18、14、12 mm で、鉄筋位置 まで穿孔を行った際の結果である。Fig. 6-2-3 同様にアンテナ間を伝う直達波が 0.7 ns に確認でき、1 ns 付近にはコンクリート内部の鉄筋からの反射波を確認できる。また、 それぞれの計測時間レーダ波形において深さ方向に直達波の遅延が確認できる。この 波はドリルの刃の進展によるものであることは明らかであるが、ここからドリルが鉄 筋に衝突したかの判断をするのは難しい。原因としては、供試体 1 ではドリル先端が ある程度深くなって以降、ドリル先端からの反射波と直達波が分離する様子が確認さ れるが、供試体 2 では穿孔深さが浅いため変化を確認できなかったものと考えられる。 (a)ドリル径 18 mm (a)ドリル径 14 mm (a)ドリル径 12 mm Fig. 6-2-3 供試体 2 計測結果
56 そこで 4 章でドリルの振動成分であるドップラの選択的抽出の可能性を確認するため に、それぞれの結果に対してレーダの計測時間方向に全ての時間でフーリエ変換を行 なった結果を、Fig. 6-2-4 に示す。レーダ波形のドリルの先端からの反射波が返ってく る時間に 20 Hz 程度のドップラ成分を確認した。商用レーダを用いた実験でもこの傾 向は確認されたため、次章にて、ドップラフィルタリングを行なった結果について示 す。 (a) ドリル径 18 mm 周波数特性 (b) ドリル径 14 mm 周波数特性 (c)ドリル径 12 mm 周波数特性 Fig. 6-2-4 供試体 2 ドップラ周波数特性
57
第 7 章 ドップラフィルタリング
7-1 ドリルの振動を用いたドリル反射波抽出の原理 本質的にドリルの反射波のみを明瞭に分離するために、ドップラ技術の適用を考慮す る。ドップラ技術は移動する物体の反射波の周波数が変化する効果(ドップラ効果) を利用するものである。物体が一方向に移動する場合、反射波の位相が時間とともに 変化するため、周波数変化として表れるが、ドリルではターゲットは基本的に大きく 移動しないため、ドリル進展によるドリルの移動そのものを周波数変化として捉える ことは難しい。一方で、ドリルはその場である振動周波数で振動していることから、 振動によるドップラ効果が得られる可能性がある。当研究室では、加振レーダ法とし て、正弦的に振動する対象物、振動しない対象物を個別に取り出す手法を提案してお り、ドリルの振動が単一周波数であれば、ドリルの周波数で振動する物体のレーダ波 形を選択的に取得可能である。ドリル穿孔中は、以下のような振動特性である。 ・ドリル:振動源であるため振動大 ・鉄筋:振動がコンクリートを伝わり、鉄筋も振動するが密度が高いため振動小 ・粗骨材:コンクリート中を振動が伝わるため振動中 このため、ドップラレーダ技術により、振動の大きいドリルの反射波を選択的に計測 可能と考えられる。ドリルの振動を用いたドリル反射波抽出の原理を以下で説明する。 振動周波数がほぼ一定であれば、その振動周波数で振動する成分をパルスドップラ 技術により抽出することができる。Fig. 7-1-1 にパルスレーダにおける加振ドップラ計 測の概念図を示す。パルスレーダにおけるパルス波形として、包絡線波形 𝑒(𝑡) に中心 周波数 𝑓𝑐、初期位相 𝜑 で変調された変調パルス 𝑝(𝑡) を考える。 𝑝(𝑡) = cos(2𝜋𝑓𝑐𝑡 + 𝜑)𝑒(𝑡) (7-1) ここで、 𝑒(𝑡) は時刻 0 でピーク値 1 を有する任意の単峰性の波形である。今、送信ア ンテナから、計測対象に向けパルス状の電波を照射し、反射体から反射された反射波 を同一のアンテナで受信するものとする。このとき、距離 𝐿 離れた反射体からの反射 波形 ℎ𝑟(𝑡) は反射波の反射係数を𝑅、電磁波の伝搬速度を𝑣とすると式(6-2)のように表 される。 ℎ𝑟(𝑡) = 𝑅𝑝 (𝑡 − 2𝐿 𝑣) (7-2) 同時に反射体が単一周波数 𝑓𝑣 、振動振幅𝛿で電磁波の伝搬方向に振動している。反射 体の振動は反射波の伝搬距離を変化させるため、振動による距離の変動を考え、𝐿(𝑡) と書き直すと式(7-3)が得られる。 𝐿(𝑡) = 𝐿 − 𝛿 cos(2𝜋𝑓𝑣𝑡) (7-3) ここで、レーダ波形の変動は GHz オーダーであるのに対し、 𝑓𝑣 は 100 Hz オーダーで あり、その変化速度は極めて遅い。この速度の違いからレーダを固定したまま、ある58 パルス繰り返し周波数でレーダ波形を取得し、繰り返し毎に波形を並べた 2 次元のレ ーダプロファイルを考えるとレーダ波形の時間 𝑡 とその取得時間 𝑇 は独立とみなせ、 式(7-4)のように表される。 ℎ𝑟(𝑡, 𝑇) = 𝑅𝑝 (𝑡 − 2 𝐿−𝛿 cos(2𝜋𝑓𝑣𝑇) 𝑣 ) (7-4) そこで、本来レーダ反射波形の振幅がピークを持つべき反射波の到達時刻 𝑡 = 2𝐿/𝑣 で の振幅に着目すると、𝑒(0)=1 であるため、式(7-5)のように表される。 ℎ𝑟( 2𝐿 𝑣 , 𝑇) = 𝑅 cos { 4𝜋𝑓𝑐𝛿 𝑣 cos(2𝜋𝑓𝑣𝑇) + 𝜑} (7-5) しかし、式(5)は初期位相 𝜑 の影響で到達時刻において最大値を持つとは限らない。 さらに、電磁波の波長が数cm に対し、振動変位は極めて小さいため式(7-6)が成立す る。 4𝜋𝑓𝑐𝛿 𝑣 = 4𝜋𝛿 𝜆𝑐 = 2𝑘𝑐𝛿 ≪ 1 (7-6) したがって、式(5-5)を 1 次近似すると式(7-7)が得られる。 ℎ𝑟( 2𝐿
𝑣 , 𝑇) ≅ 𝑅{cos 𝜑 − 2𝑘𝑐𝛿 cos(2𝜋𝑓𝑣𝑇) cos 𝜑} (7-7)
ℎ𝑟(2𝐿/𝑣, 𝑇) は波形取得毎に振幅が振動周波数 𝑓𝑣 で正弦的に変化しており、その振幅 が振動振幅 𝛿 に比例している。しかし、cos 𝜑 にも比例するため、初期位相 𝜑 によって パル変調波の形状が変わり到達時刻を正確に評価できない。そこで、送信パルスの変 調波の直交する位相成分を持つ 𝑞(𝑡) を考える。𝑞(𝑡) は式(7-8)のように表される。 𝑞(𝑡) = cos (2𝜋𝑓𝑐𝑡 + 𝜑)𝑒(𝑡) (7-8) 同様に 𝑞(𝑡) に対応するレーダ波形に対しても反射波の到達時刻での振幅に着目し、式 (7)と同様の 1 次近似をすると式(7-9)が得られる。 ℎ𝑖( 2𝐿
𝑣 , 𝑇) ≅ 𝑅{cos 𝜑 + 2𝑘𝑐𝛿 cos(2𝜋𝑓𝑣𝑇) cos 𝜑} (7-9)
ここで、ℎ𝑟(𝑡, 𝑇) を実部、ℎ𝑖(𝑡, 𝑇) を虚部にもつ複素波形(解析信号と呼ぶ) ℎ̇(𝑡, 𝑇) を定 義し、到達時刻での振幅に着目すると、式(7-10)が得られる。 ℎ̇ (2𝐿𝑣 , 𝑇) ≅ 𝑅𝑒𝑗𝜑{1 + 2𝑘𝑐𝛿 cos(2𝜋𝑓𝑣𝑇)} ≅ 𝑅𝑒𝑗𝜑{1 + 𝑗𝑘𝑐𝛿(𝑒𝑗2𝜋𝑓𝑣𝑇+ 𝑒−𝑗2𝜋𝑓𝑣𝑇)} (7-10) これを 𝑇 方向にフーリエ変換すれば、直流成分𝑅と正、負の振動周波数 𝑓𝑣 において ピーク振幅値 𝑘𝑐𝛿𝑅 が得られる。以上から、振動周波数𝑓𝑣の抽出と、周波数領域での顕 著な振動成分を時間領域で抽出することで、ドップラ成分のみをレーダ波形から計算 できる。具体的にはFig. 7-1-2 のように、高速な繰り返し周波数で得られたレーダプロ ファイルの解析信号を求め、繰り返し計測時間方向にフーリエ変換することによりレ ーダ波形の遅延時間毎に振動周波数成分を確認する。振動成分の線スペクトルが得ら

![Fig. 2-2-8 ドリル進展を模擬したレーダ波形の計測例経過時間[ns]](https://thumb-ap.123doks.com/thumbv2/123deta/6237074.1092151/16.892.135.747.146.471/Fig228ドリル進展を模擬したレーダ波形の計測例経過時間ns.webp)