九州大学学術情報リポジトリ
Kyushu University Institutional Repository
将来的な月・惑星探査に向けた脚式ローバの設計と 運動性能に関する研究
錦織, 慎治
九州大学大学院工学府航空宇宙工学専攻
https://doi.org/10.15017/26478
出版情報:Kyushu University, 2012, 博士(工学), 課程博士 バージョン:
権利関係:
将来的な月・惑星探査に向けた
脚式ローバの設計と運動性能に関する研究
錦 織 慎 治
目 次
第1章 序論 --- 1
1.1 研究の目的・背景 --- 1
1.1.1 地球外天体探査の歴史的展開 --- 1
1.1.2 各国の月・惑星探査ローバの開発状況 --- 2
1.1.3 歩行型ローバの現状 --- 5
1.2 本論文の構成 --- 6
第2章 脚式移動ロボット --- 7
2.1 脚式移動ロボットの現状 --- 7
2.1.1 歩行型ロボット --- 7
2.1.2 跳躍型ロボット --- 12
2.2 脚式移動ロボットの制御システムとその課題 --- 13
2.3 月・惑星探査のために脚式ローバが備えるべき条件 --- 14
第3章 脚式ローバの形状 --- 15
3.1 ローバの形状と転倒 --- 15
3.1.1 脚の配置方法 --- 16
3.1.2 脚の構成 --- 19
3.2 3次元等方脚配置の運動学的な性能 --- 20
3.2.1 座標系の定義 --- 20
3.2.2 順運動学と逆運動学 --- 23
3.2.3 ヤコビ行列 --- 28
3.2.4 移動性能の評価指標 --- 29
3.2.4.1 接触可能領域 --- 29
3.2.4.2 可操作性楕円体を利用した指標 --- 31
3.2.4.3 自重支持トルク --- 34
3.2.4.4 接触点と運動性能 --- 36
3.2.4.5 特異姿勢 --- 41
3.2.4.6 歩行に要するエネルギ --- 43
3.2.4.7 転倒と脚配置 --- 45
3.2.5 月・惑星探査ローバに適した脚配置 --- 47
3.3 ローバのサイズ設計 --- 48
3.4 実験機の設計・製作 --- 52
3.4.1 要求性能 --- 52
3.4.2 実験機の概要 --- 52
3.4.2.1 主要諸元 --- 52
3.4.2.2 実験機外観 --- 56
3.4.2.3 マイコン内処理 --- 57
3.4.2.4 動作確認 --- 58
第4章 脚式ローバの移動形態 --- 59
4.1 月・惑星探査ローバの踏破環境 --- 59
4.2 動力学シミュレーションモデルの構築 --- 61
4.3 歩行 --- 61
4.3.1 胴体の回転に対する移動能力の確保 --- 61
4.3.2 脚数の冗長性利用 ―非支持脚による重心位置制御 --- 67
4.3.3 脚配置の特殊性利用 ―効率的な歩行姿勢 --- 76
4.4 胴体の回転を伴う新しい移動形態の提案 --- 83
4.4.1 準静的回転運動 --- 83
4.4.2 動的回転運動 --- 91
4.4.2.1 動的回転運動のための姿勢検討 --- 91
4.4.2.2 蹴り出しのタイミングと蹴り出し方向の効果 --- 99
4.5 3次元等方脚配置型ローバを用いたミッション --- 108
第5章 総括 --- 109
参考文献 --- 111
Appendix 1 主軸問題 --- 116
Appendix 2 実験機設計図 --- 117
図目次
Fig.1.1 Example of the rough terrains. --- 3
Fig.1.2 ATHLETE ©NASA/JPL. --- 6
Fig.1.3 PTinto ©CAB. --- 6
Fig.2.1 AIBO ©SONY. --- 8
Fig.2.2 TITAN-VIII ©Tokyo Institute of Technology. --- 8
Fig.2.3 BigDog ©Boston Dynamics. --- 9
Fig.2.4 Tarry I & II ©University of Duisburg. --- 9
Fig.2.5 STriDer ©RoMeLa. --- 9
Fig.2.6 Chariot III ©Chiba Institute of Technology. --- 9
Fig.2.7 TITAN X ©Tokyo Institute of Technology. --- 10
Fig.2.8 RHex ©Boston Dynamics. --- 10
Fig.2.9 Concept model of ‘moon walker’ for Surveyor program. ©NASA/JPL --- 10
Fig.2.10 Ambler ©CMU. --- 10
Fig.2.11 Dante II walking at Mount Spurr ©CMU. --- 10
Fig.2.12 Mother & Daughter Rover by ISAS/JAXA. --- 11
Fig.2.13 SpaceClimber ©DFKI. --- 11
Fig.2.14 SCORPION ©DFKI. --- 11
Fig.2.15 A miniature jumping robot. ©EPFL --- 12
Fig.2.16 Air Hopper ©Tokyo Institute of Technology. --- 12
Fig.2.17 Hopping-type rover like a sea urchin ©Kyushu University. --- 12
Fig.3.1 ASTERISK ©Osaka University. --- 16
Fig.3.2 Schematic diagrams of the rovers considered in this study. --- 17
Fig.3.3 Landing posture of a 4-legged rover based on a regular tetrahedron. --- 17
Fig.3.4 Model of a 6-legged rover based on a regular octahedron. --- 18
Fig.3.5 Model of a 8-legged rover based on a regular hexahedron. --- 18
Fig.3.6 Link mechanism of the rover’s leg. --- 20
Fig.3.7 Coordinate system fixed on the rover’s body and terrain surface. --- 21
Fig.3.8 Coordinate system fixed on the leg joints. --- 21
Fig.3.9 Angle of Joint 1. --- 26
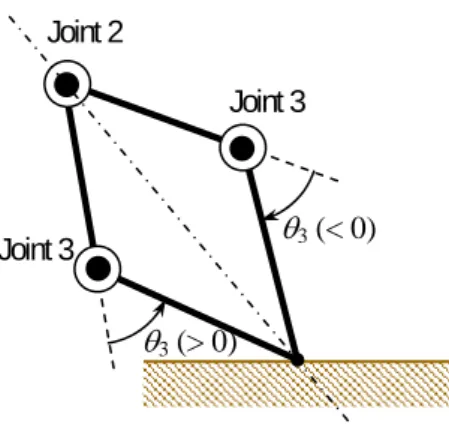
Fig.3.10 Angle of Joint 3. --- 26
Fig.3.11 Two angles of Joint 3 and the postures of rover’s leg for the same landing point. --- 27
Fig.3.12 Angle of Joint 2. --- 28
Fig.3.13 Reachable workspace of each leg on the ground. --- 31
Fig.3.14 Image of the manipulability ellipsoid and its cross section. --- 32
Fig.3.15 Cross section of the manipulability ellipsoid on the ground. --- 33
Fig.3.16 Definition of vector 0zj and 0pE ,j. --- 35
Fig.3.17 Maximum torque for the ‘best’ posture. --- 36
Fig.3.18 Manipulability and load of Leg 1 of the 6-legged rover on the flat plane. --- 37
Fig.3.19 Manipulability and load of Leg 2 of the 6-legged rover on the flat plane. --- 38
Fig.3.20 Manipulability and load of Leg 1 of the 8-legged rover on the flat plane. --- 39
Fig.3.21 wG of Leg 1 of the 6-legged rover (on the flat plane, = 0, 45, 90 [deg]). --- 40
Fig.3.22 wG of Leg 2 of the 6-legged rover (on the flat plane, = 0, 45, 90 [deg]). --- 40
Fig.3.23 wG of Leg 1 of the 8-legged rover (on the flat plane, = 0, 45, 90 [deg]). --- 40
Fig.3.24 Singular configuration about the shoulder. --- 42
Fig.3.25 Trajectory of the tips of the walking legs (top view). --- 43
Fig.3.26 Energy consumption for supporting period. --- 44
Fig.3.27 Transition of Leg 1 and Leg 2 of the 6-legged rover for supporting period (S = 0.08 [m], = 45 [deg]). --- 44
Fig.3.28 Transition of Leg 1 of the 8-legged rover for supporting period (S = 0.08 [m], = 45 [deg]). -- 45
Fig.3.29 Support Polygon and projected point of robot’s c.m. on the ground. --- 46
Fig.3.30 Rotational/turnover motion of the 6-legged rover (top view). --- 47
Fig.3.31 Rotational/turnover motion of the 8-legged rover (top view). --- 47
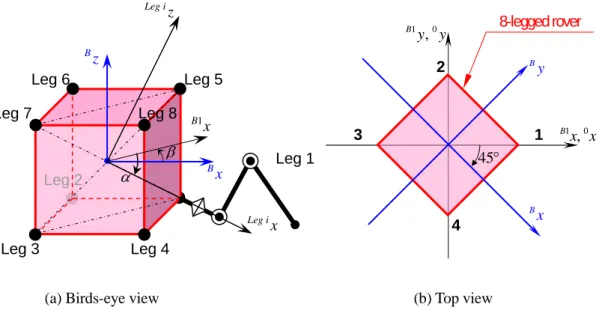
Fig.3.32 Definition of the body-fixed coordinate system B for the 8-legged type rover. --- 48
Fig.3.33 Representative posture of the 8-legged rover for the design. --- 49
Fig.3.34 The maximum torque distribution of the 8-legged rover for the design (R + l1 = 0.10 [m]). --- 49
Fig.3.35 Unacceptable conditions for landing on the ground. --- 51
Fig.3.36 Flowchart of design of the test bed. --- 51
Fig.3.37 Overview of the servomotor (KRS-4014HV). --- 53
Fig.3.38 H8/3687F microcomputer board (H8S-03C). --- 54
Fig.3.39 Analysis of the manipulability and the load of the designed test bed. --- 55
Fig.3.40 The maximum torque conditions for the joints. --- 56
Fig.3.41 Overview of the test bed. --- 56
Fig.3.42 Processing inside the microcomputers. --- 58
Fig.4.1 Rocks on the Mars surface. ©NASA/JPL --- 60
Fig.4.2 Crater on the Moon surface. ©NASA --- 60
Fig.4.3 Rover model in Open Dynamics Engine. --- 61
Fig.4.4 Screenshots of an overturn simulation without control. --- 62
Fig.4.5 Leg’s attitude control when the all legs are in their singular configurations. --- 65
Fig.4.6 Screenshots of an overturn simulation with a leg’s attitude control when the all legs are in their singular configurations. --- 65
Fig.4.7 Leg’s attitude control when the lower-side four legs are not in their singular configurations. --- 66
Fig.4.8 Screenshots of an overturn simulation with a leg’s attitude control when the lower-side four legs are not in their singular configurations. --- 67
Fig.4.9 Crawl gait and intermittent crawl gait. --- 68
Fig.4.10 Rover’s center of mass. --- 69
Fig.4.11 Center of mass of the leg. --- 70
Fig.4.12 Existence region of c.m. of upper-side legs. --- 70
Fig.4.13 Center of mass of rover’s each component. --- 71
Fig.4.14 Geometric relation between the rover’s center of mass and touching point on the terrain. --- 73
Fig.4.15 Crawl gait pattern for walking. --- 73
Fig.4.16 Trajectory of the leg tip for walking. --- 74
Fig.4.17 Demonstration of walking with the balance control using upper-side legs. --- 75
Fig.4.18 Three attitudes of the 8-legged rover considered in this study. --- 79
Fig.4.19 Coordinate systems for the discussion in this section. --- 79
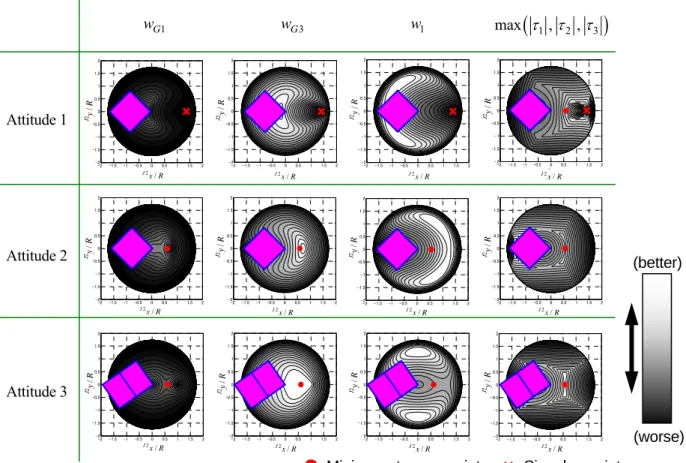
Fig.4.20 Contours of the estimation indices for each attitude (hJ2 = 1.0 R). --- 80
Fig.4.21 Contours of the estimation indices for each attitude (hJ2 = 1.5 R). --- 81
Fig.4.22 Trajectory of supporting legs on the planet surface. --- 82
Fig.4.23 Energy consumption of the three walking attitudes. --- 82
Fig.4.24 Reasonable attitude for walking with the 6-legged isotropic rover. --- 82
Fig.4.25 Schematic model of the leg of a stick insect. --- 83
Fig.4.26 Three-dimensional images of the walking attitudes. --- 83
Fig.4.27 Locomotion of a rimless wheel. --- 84
Fig.4.28 The quasi-static rotational motion. --- 84
Fig.4.29 Demonstration of the quasi-static rotational motion. --- 85
Fig.4.30 Parameters describing the rover’s attitude. --- 85
Fig.4.31 Required power of a forward leg for the different pitch angles and foot positions. --- 87
Fig.4.32 Required power of a backward leg for the different pitch angles and foot positions. --- 88
Fig.4.33 Efficient configuration of the forward legs for the quasi-static rotational motion. --- 88
Fig.4.34 Geometry of the rover’s body and its forward legs in efficient quasi-static rotational motion. -- 89
Fig.4.35 Comparison of the total joint power required for each locomotion. --- 90
Fig.4.36 The dynamic rotational motion. --- 92
Fig.4.37 Parameters describing the rover’s attitude. --- 93
Fig.4.38 Criteria of the dynamic rotational motion for the different initial pitch angles and foot positions for h = 1.5 R). --- 97
Fig.4.39 Criteria of the dynamic rotational motion for different body heights and foot positions for 0 = 0 [deg]. --- 98
Fig.4.40 Contour map of max with respect to and h. --- 98
Fig.4.41 Contour map of vC, 0 for max with respect to and h. --- 98
Fig.4.42 Force and minimum torque obtained by kicking the terrain surface. --- 102
Fig.4.43 Minimum normalized torque obtained around the rover’s body by kicking. --- 102
Fig.4.44 Two-dimensional model of the rover’s dynamic rotational motion. --- 103
Fig.4.45 Simulation results of the dynamic rotational motion for case 1 ( = 0.6 and = 0.0 [deg]). --- 104
Fig.4.46 Simulation results of the dynamic rotational motion for case 2 ( = 1.0 and = 0.0 [deg]). --- 105
Fig.4.47 Simulation results of the dynamic rotational motion for case 3 ( = 1.0 and = 5.0 [deg]). --- 106
Fig.4.48 Screenshots of climbing up simulation on a small bump with the dynamic rotational motion. -- 107
Fig.4.49 Exploration mission with the spherically-isotropic rover proposed in this study. --- 108
Fig.A1 Principal axis problem. --- 116
表目次
Table 1.1 Strategies of the robotic space exploration --- 4
Table 1.2 Realized and currently-planned rovers --- 4
Table 3.1 Regular polyhedrons --- 17
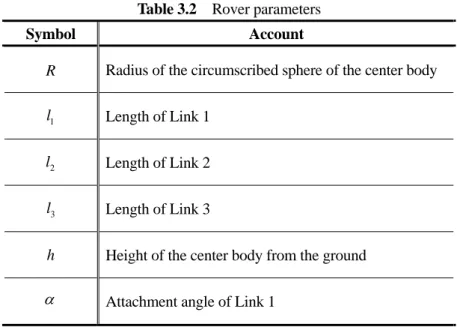
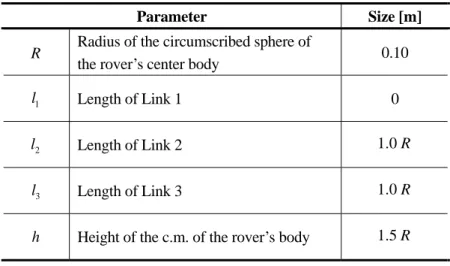
Table 3.2 Rover parameters --- 22
Table 3.3 Attachment angle () of the supporting leg --- 22
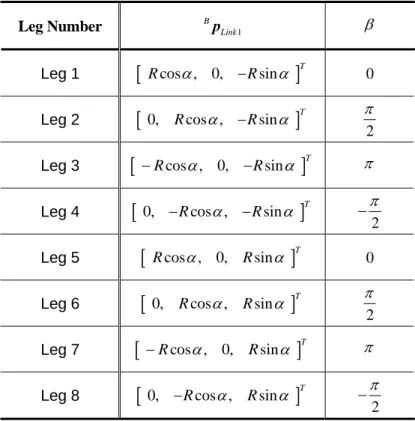
Table 3.4 Origin shift vector (BpLink1) and rotation angle () --- 24
Table 3.4 Positions of Joint 2 in B1 --- 27
Table 3.5 Representative size of the rover parameters for the analysis --- 30
Table 3.6 Value of for each leg --- 48
Table 3.7 Specification of the test bed --- 54
Table 4.1 Elements of rotation matrix of rover’s three links --- 63
Table 4.2 Performance indices at the minimum torque point for hJ2 = 1.0 R --- 80
Table 4.3 Performance indices at the minimum torque point for hJ2 = 1.5 R --- 81
Table 4.4 Terrain conditions in simulations --- 103
Table 4.5 Kick interval and RVI obtained in the simulations --- 106
第 1 章 序論
1.1 研究の目的・背景
1.1.1 地球外天体探査の歴史的展開
1957年のスプートニク1号の打ち上げから始まった宇宙開発は,地球周回軌道上への宇宙機投入 から地球外天体への探査機打ち上げに進んでいった.世界初の地球外天体探査機は,スプートニク 1号の成功から間もない1959年に打ち上げられた旧ソ連の無人月探査機ルナ1号である.この探査 機では,月への硬着陸(衝突)が目的となっていたが,これには失敗し,月近傍の接近通過(フラ イバイ)のみ行った.その後,ルナ2号(1959年)によって初めて月への硬着陸に成功し,ルナ9 号(1966年)では世界初の月への軟着陸にも成功した.1960年代に入ると,月への有人飛行計画が 米ソによって積極的に推し進められ,1969年にアメリカのアポロ11 号によって月の有人探査が世 界で初めて行われ,以降1972年のアポロ17号まで12人の宇宙飛行士が月面に降り立った.一方,
月以外の天体探査においては,アメリカのマリナー2号(1962年)が金星フライバイを行ったのが 最初の成功例である.パイオニア10・11号(1973・74年打ち上げ),ボイジャー1・2号(1977年 打ち上げ)による外惑星探査が行われ,これらによって太陽系のすべての惑星の姿が撮影されたこ とになる.フライバイやオービタによる周回軌道上からの観測だけではなく,旧ソ連のベネラ探査 機群(1966~1982年)やベガ1号・2号(1985年)による金星への着陸,旧ソ連のマルス3号(1971 年)・マルス6号(1974年)やアメリカのヴァイキング1・2号(1976年)およびMars Pathfinder
(1997年)などによる火星への着陸も行われた.
21世紀に入ると,各国が月探査機を続々と打ち上げ始め,アポロ計画の終了から約30年ぶりに 大規模な月探査が開始された.日本も 2007 年に月周回衛星「かぐや(SELENE)」を打ち上げ,高 精度の観測データを得た[1].地球外天体探査は長いあいだ国家的事業として進められてきたが,近 年は民間にも同様の動きが見られるようになり,インターネット関連事業の大手であるGoogle社を スポンサーとしたLunar X Prizeという月面探査レースも行われているところである[2].地球近傍の みならず,火星を筆頭とする惑星の探査も1990年代から欧米を主導に活発化している.2008年に はアメリカ航空宇宙局(NASA)が着陸探査機 Phoenix を火星に送り,現地での土壌分析の結果,
火星に水(の氷)が存在することを初めて直接確認した[3].2010年,アメリカのオバマ大統領によ って2030年代半ばを目標とした有人火星探査計画が発表され[4],ヨーロッパ宇宙機関(ESA)では
「Aurora Program」と称する長期計画において2030年までに火星に人類を送ることを目指している
[5].2004年には,NASAとESAで共同開発された探査機カッシーニが土星の軌道に投入され,翌年 には搭載されていたホイヘンス・プローブを土星の衛星であるタイタンの上空で切り離して,大気 観測後にタイタン表面に着陸させた[6].2006 年に NASA によって打ち上げられた探査機 New
Horizonsは,太陽系の大型天体のうち,唯一探査が行われていなかった冥王星に向かって2012年現
在も飛行中である[7].今後も木星の衛星エウロパを探査する計画[8] など,これまで詳細な探査が行 われなかった天体にも探査機が送られようとしている.このように,宇宙開発分野は人類の本格的 な宇宙進出に向けて新たなる局面に入った.
1.1.2 各国の月・惑星探査ローバの開発状況
訓練された宇宙飛行士による有人探査であれば,複雑なミッションもこなすことができる.しか し,飛行士を地球外天体に送るためには莫大な予算と技術が必要である.また,探査環境によって は飛行士が活動するには危険が伴ったり,活動自体が困難な場所もある.このような場面では自力 で移動する無人ロボットが多く使われる.
NASAは1990年代以降,火星への軟着陸に数回成功している.火星探査機Mars Path Finderには
探査車Sojourner が搭載され,1997 年に火星表面に着陸,世界で初めて火星表面を直接動き回りな
がら探査を行った[9].2004年に火星に降り立った2台の探査車Mars Exploration Rovers(MERs;愛
称Spirit,Opportunity)は,当初予定されていたミッション期間である1年を大幅に超えて稼働し続
け,このうちOpportunityは2012年現在もなお興味深い観測データを地球に送信し続けている(Spirit
は2010年に通信途絶)[10].さらに2012年には,4台目の火星探査車Mars Science Laboratory(MSL;
愛称Curiosity)を送ることにも成功した[11].MSLはMERsの10倍もの重量をもつ実験装置を搭載
しており,これまで以上の調査結果が得られることを期待されている.ESA も2018 年に同様の火
星探査車 ExoMars を打ち上げる予定である[12].一方,月に対しては日本の宇宙航空研究開発機構
(JAXA)が「かぐや」の後継機としてSELENE-2を2010年代半ばまでに打ち上げることを目指し ており,この中では日本初の月面探査車の搭載も計画されている[13].同様の計画は,中国[14],イン ドとロシア[15] でも発表されている.
上述した探査車のように,月や惑星の表面あるいは表面近傍を直接動き回りながら探査活動を行 うロボットは一般に「ローバ(Rover)」と呼ばれている.ローバは,いくつかある月・惑星探査の 方法(Table 1.1を参照)の中でも必要とされる技術レベルが高い無人探査方法であり,地質学的・
宇宙生物学的に貴重なデータをもたらすことが期待されている.
ローバはその名が示すとおり,自由に動き回れることに大きな意義があるため,その移動機構が ミッションの成否を決める.しかし,未知環境である天体の表面を自律的に移動して探査するのは 困難な作業である.特に,探査対象として注目されるのはFig.1.1に示すようなクレータや断崖など の地殻が露出した地形,いわゆる「不整地」と呼ばれる地形である.比較的平坦な領域において,
地質学的に有用なサンプルを採取したい場合,ローバはドリルやボーリング装置などによって土壌 を深く掘り出すという作業を行わなければならない.一方,不整地においては土壌を深く掘り出す ことなく,天体表面に比較的近いところでも天体内部の構造を知るために有用な科学データを容易 に収集できると考えられている.
これまでにさまざまな移動機構をもつローバが提案されてきたが,実用化され,なおかつ成功を おさめたローバは,上述した探査車のように,すべて車輪移動方式を採用していた(Table 1.2を参 照のこと).車輪移動方式はエネルギ効率が高く,機構・制御も比較的シンプルなので多用されてい る.しかし,移動のためには車輪との接触面が連続的である必要があり,凹凸の激しい不整地を走 破するのは困難である.この欠点を補うために,Sojourner,MERs,MSLに適用されたRocker-Bogie 方式[16]や日本の宇宙科学研究所(ISAS)の5輪ローバ試験機「Micro5」に適用しているPEGASUS 方式[17],スイス連邦工科大学ローザンヌ校のShrimp方式[18] といったローバ独自のサスペンション 機構が開発されている.特に,クレータの縁などの傾斜の大きな場所(傾斜30度以上)は車輪だけ で安定に登ることは難しい(MERsの地上試験では固い地盤の上ならば傾斜25度までの安全性は確 認されていて[19],無人ロボットではないがアポロ計画に導入されたLunar Roving Vehicle(LRV)も 最大25度までの斜面を登ることができた[20]).さらに,月は表面がレゴリスと呼ばれる細かい粒子 からなる緩い砂地になっているため,車輪がレゴリスの中でスタックして動けなくなる危険もある.
実際,LRVはスタックして動けなくなったところを宇宙飛行士によって引き出されたという報告が ある[21].当然のことながら無人探査の場合,人間が直接手を加えることはできない.地球から遠隔 操作するにしても通信のタイムラグの問題や電波そのものが届かない可能性もあることから,円滑
な探査活動を行うためにも,ローバが自律的にスタックを回避もしくはスタックから抜け出すよう なシステムが車輪移動方式には必要となる.スタックを抑える策としては,車輪にかかる接地圧を 低くするため,車輪形状を従来の円柱形から紡錘形に変えたり[22],車輪そのものが弾性変形する柔 軟車輪にすること[23]が検討されている.あるいは車輪ではなくクローラ(無限履帯)で移動するタ イプのローバ[24, 25] も開発されているものの,不整地の走破能力はまだ十分とはいえない.また,車 輪移動型ローバが乗り越えられる障害物の大きさは,車輪径に比例して大きくなる.そのため,サ スペンションの改良だけでは対処しきれない大小さまざまな岩石が散在するような地形を踏破させ るためには,ローバ自体の大型化が避けられない.事実,MSLは機体全長が3 m程度にも上り,こ れは自動車と同程度のサイズである.
一方,実際にミッションに投入されたもののうち,変わった移動機構をもったものとしては,火 星探査機マルス2号・3号に搭載されたPrOP-M [26] がある.このローバは,着陸機とケーブルでつ ながれた状態で,ローバ下部の左右に取り付けられたスキー板のようなものを火星表面で滑らせな がら移動できる機構をもっていた.しかし,探査機の着陸失敗や通信途絶により,ミッションは失 敗に終わった.
また,天体表面「近傍」を移動するという意味では,飛行もローバの移動形態の1つとして考え られる.飛行移動の場合,天体表面につねに接触している場合よりも広範囲の移動が可能で,飛行 中は広範囲の観測も可能である[27].火星のように大気のある天体では,気球[28] やグライダー[29], 回転翼機[30] が検討されている.また,月のように大気のない天体では,推力を持った着陸機が離 陸と着陸を繰り返すことで移動することが検討されている[27].
(a) Craters on the moon ©JAXA/NHK
(b) Cliff on the Mars ©NASA/JPL Fig.1.1 Example of the rough terrains.
Table 1.1 Strategies of the robotic space exploration
Strategy Example Telescope
(Ground, Orbital)
Subaru Telescope, Keck Telescopes (at Hawaii), Hubble Space Telescope, Herschel Space Telescope Fly-by Voyager 1&2, Mariner 4~7, New Horizons,
Mars 1&4 Remote
exploration
Orbiter Mars Reconnaissance Orbiter, Magellan, Galileo Orbiter, Cassini Probe, Penetrator Huygens, Galileo probe,
LUNAR-A (→canceled), Deep Space-2 (→failed) Lander Viking 1&2, Phoenix,
Luna 9, Venera 7
Rover (see Table 1.2)
Direct exploration
Sample return Luna 16/20/24, Genesis, Stardust, Hayabusa
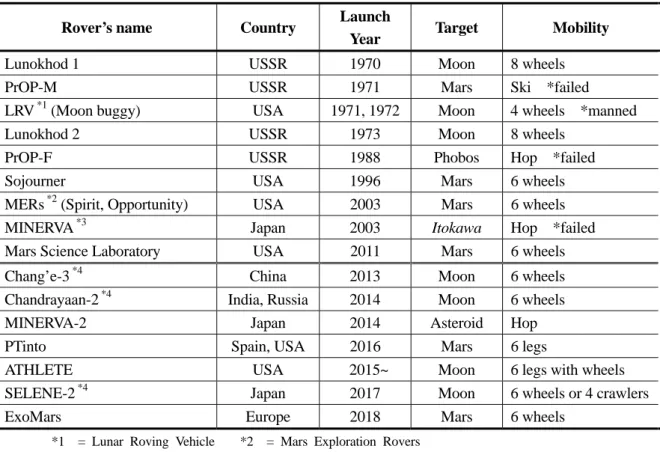
Table 1.2 Realized and currently-planned rovers Rover’s name Country Launch
Year Target Mobility
Lunokhod 1 USSR 1970 Moon 8 wheels
PrOP-M USSR 1971 Mars Ski *failed
LRV *1 (Moon buggy) USA 1971, 1972 Moon 4 wheels *manned
Lunokhod 2 USSR 1973 Moon 8 wheels
PrOP-F USSR 1988 Phobos Hop *failed
Sojourner USA 1996 Mars 6 wheels
MERs *2 (Spirit, Opportunity) USA 2003 Mars 6 wheels
MINERVA *3 Japan 2003 Itokawa Hop *failed
Mars Science Laboratory USA 2011 Mars 6 wheels
Chang’e-3 *4 China 2013 Moon 6 wheels
Chandrayaan-2 *4 India, Russia 2014 Moon 6 wheels
MINERVA-2 Japan 2014 Asteroid Hop
PTinto Spain, USA 2016 Mars 6 legs
ATHLETE USA 2015~ Moon 6 legs with wheels
SELENE-2 *4 Japan 2017 Moon 6 wheels or 4 crawlers
ExoMars Europe 2018 Mars 6 wheels
*1 = Lunar Roving Vehicle *2 = Mars Exploration Rovers
*3 = Micro / Nano Experimental Robot Vehicle for Asteroid *4 = Name of the mission
1.1.3 歩行型ローバの現状
NASA のジェット推進研究所(JPL)が月面基地運搬用ローバとして開発した「ATHLETE
(All-Terrain Hex-Legged Extra-Terrestrial Explorer)」[31] は,関節をもった脚の先に車輪を取り付ける ことで,従来の車輪式ローバでは走破が困難であった地形でも胴体の姿勢を自由に変えながら安定 して動き回ることができる(Fig.1.2).ただし,このローバは無人探査用というよりは,将来的な有 人による月面基地建設における資材の運搬用で,いわば人間の補佐役として利用される予定である.
これにより,比較的平坦な場所では脚関節をロックして車輪で移動し,車輪では移動することので きない起伏の激しい場所では,逆に車輪をロックして脚を上下させながら歩行することで移動でき る.このような脚と車輪の長所を併せ持つハイブリッド型ローバは,近年注目が集まっており,研 究例も増えつつある[32, 33].
上の例は純粋な歩行型ローバとは異なるものの,不整地探査をスムーズに行うためには,車輪移 動方式よりは関節をもった脚を使った歩行型ローバの方が能力を発揮できる可能性が大きいことは 古くから認知されている.そして,探査領域の拡大を目指して,車輪移動方式のみならず歩行型ロ ーバも実用化の動きが高まりつつある.日本では2008年に可決された宇宙基本法に基づいて作成さ れた宇宙基本計画案[34] に,「第1段階(平成32年(2020年)頃)として科学探査拠点構築に向け た準備として,我が国の得意とするロボット技術をいかして,二足歩行ロボット等による高度な無 人探査の実現を目指す」と明記された.また,2016年にはNASAとスペインの宇宙生命学センター
(CAB)が共同でFig.1.3に示すような歩行型ローバ「PTinto」を火星に送り,地球外生命を探ろう としている[35, 36].
天体探査用に限らず,これまでにさまざまな歩行移動ロボットが研究・開発されてきたが,歩行 移動はその自由度の多さから,車輪移動よりも制御が複雑になる.さらに,いったん転倒するとミ ッションの継続が不可能になってしまう可能性があるため,歩行ロボット研究の多くが,転倒を回 避しながら安定に移動するための制御アルゴリズムや転倒後の起き上がり動作の生成に関するもの
であった[37-39].しかし,このようなアプローチの仕方が,さらなる制御の複雑化とそれに伴う計算
機への負荷増大をもたらし,スムーズで効率的な探査活動が望まれる月・惑星探査ローバにおいて,
転倒の問題は歩行型ローバ実用化への最大のネックになっている.
最も直接探査の要求が高まっているのが,月の水資源の発見である.人類が宇宙へ展開していく うえで足がかりとなり得る月面において,水の現地調達は重大な関心事である.過去,アメリカの
探査機Clementine(1994年)やLunar Prospector(1998年)による月周回軌道上からのレーダ観測に
よって,月南極地域には大量の水の氷が存在する可能性が示唆されていたが[40],月面衝突機を用い
たLCROSS(2009年)による観測調査により,この地域にあるカベウスクレータにおいて水の存在
証拠が多く得られたことが発表された[41].極地域のクレータの中には1年中太陽光が当たることの ない永久陰が存在し,このようなクレータの底では表面もしくは地中の浅いところで氷が蒸発する ことなく残されている可能性が高いことが指摘されていることから,月の南極域はローバの探査対 象として有力視されている.しかし,クレータの内部は起伏の激しい地形であることが予想され,
これを直接調査することは車輪移動方式では困難となる.そこで歩行型ローバの高い不整地踏破性 能が注目されているのだが,月の極域では太陽光が非常に低い高度から射すため,物体の影が長く 伸びてしまい,ローバがカメラを使って光学的に環境を認識するのが困難になる.これにより歩行 型ローバの転倒リスクはさらに増えてしまうため,歩行型ローバによる探査を実現するには,従来 の歩行ロボットとは異なるアプローチで転倒の問題を確実に解決することが求められる.
Fig.1.2 ATHLETE ©NASA/JPL. Fig.1.3 PTinto ©CAB.
1.2 本論文の構成
本研究では,不整地踏破能力が優れた歩行型ローバの特性を生かしつつ,通常の歩行型ローバで 実用化の最大のネックとなっていた転倒の問題を解決するために,形状の面から転倒問題を解決す るような歩行型ローバを提案し,その利用価値について基礎的な検討を行う.
本論文では,まず第2章で旧来研究開発がなされてきた脚式移動ロボットの概要を述べ,その考 察を通して従来の脚式移動型ローバが抱える問題を明確化し,解決のヒントを探る.これをもとに 第3章において,ローバの形状に着目した問題解決を図る.運動学的見地からローバの歩行性能を 評価・比較して,月・惑星探査ローバとして適した形状を提案する.第4章では,提案したローバ の運動性能について検討し,月・惑星探査における利用価値について議論する.第5章で本論文の 総括と今後の課題を述べる.
第 2 章
脚式移動ロボット
本章では,本研究の主題である脚式移動ロボットについて,従来なされてきた研究概要を示し,
その問題点を追求することで,転倒問題解決のためのヒントを探る.ここで得られた知見と宇宙探 査特有の課題をもとにして,脚式移動ロボットを月・惑星探査ローバとして利用するために必要な 条件をまとめる.
2.1 脚式移動ロボットの現状
脚式移動ロボットは,脚(脚関節)を操作することにより移動面からの反力を間接的に操作し,
胴体を推進させる.その推進形態は「歩行」,「跳躍」,「回転」の3種類に大別することができる.
2.1.1 歩行型ロボット
歩行は自然界に存在する陸上生物にとって最も馴染みのある移動方法である.極めて生物的な移 動手段であるがゆえ,「生物の動きにいかに近づけられるか」が歩行型ロボットの進化の過程におい て暗黙の目標として存在している.それは,ロボットの構造,形状などのハードウェア的な側面の みならず,制御というソフトウェア面においても然りである.
これまで研究されてきた歩行型ロボットの外見的特徴として,その脚数に着目すると,自然界に 存在する陸上生物と同じ2脚,4脚,6脚のものが多くみられる.歩行型ロボットといえば,ヒトに とって馴染み深い2足歩行を行うものが一般にも広く認知されている.研究例は非常に多いが,本 田技研工業株式会社のヒューマノイドロボットASIMO [42] やSONYのSDR-3X [43] がよく知られて いる.哺乳類や爬虫類のような4足歩行を行うロボットとしては,SONYのエンタテインメントロ
ボット AIBO(Fig.2.1)や研究用プラットフォームとして国内では広く利用実績のある東京工業大
学のTITANシリーズ(Fig.2.2)[44] などの多くの研究例がある.中でもBoston Dynamics社が軍事用
に開発した 4 足歩行ロボット「BigDog」[45] は,脚の動的な運動を絶えず繰り返すことによって,
不安定な足場の上でも転倒することなく高い踏破性能を発揮することに成功した(Fig.2.3).昆虫の ような6足歩行を行うロボットとしては,Fig.2.4に示すようなDuisburg大学のTarryシリーズ[46, 47]
や,オハイオ州立大学(OSU)のOSU-HEXAPOD [48] およびAdaptive Suspension Vehicle (ASV) [49] な どがある.また,これらとは異なる脚数を採用した特殊なロボットとして,Robotics and Mechanisms Laboratory (RoMeLa) の「STriDer (Self-excited Tripedal Dynamic Experimental Robot)」[50] のように,
自然界には存在しない(あるいは発見されていない)3 足による歩行を試みようとするものもある
(Fig.2.5).
自然界に存在しない形態をもつ歩行型ロボットは,数少ないながらも研究例がある.歩行は起伏 の激しい場所を移動するのには適しているが,安定した移動を行うためには複雑な制御が要求され る.そこで,歩行のための脚を持ちつつ,歩行よりも制御が容易で移動効率のよい車輪やクローラ も同時に備えたロボットが研究開発されている.Fig.2.6のChariot IIIは,比較的平坦な路面では胴 体に備え付けられた大型車輪と脚に備え付けられた補助輪を用いて移動するが,段差のある路面で
は補助輪ではなく脚を用いて車輪移動のアシストを行う[51, 52].また,Fig.2.7のTITAN Xは,1脚あ たり3自由度をもつ脚を4本備えているため,従来の4足歩行ロボットのような移動ができる.し かし,脚を折りたたむことでクローラによる移動ができる[53].さらに,一般的な歩行型ローバは 1 脚あたりいくつかの関節をもった構成をもっているが,Fig.2.8のように車輪式ロボットのリム部分 を取り除き,スポーク部分を脚と見立てたような構成をもつロボット[54, 55] も,脚式ロボットと称し て少なからず存在する.これも自然界の生物には存在しない形態であり,車輪移動型ロボットのよ うに各脚の自由度は少ないものの,脚先が岩石などの障害物を叩くような動きをすることで,車輪 移動型ロボットでは踏破が困難な悪路でさえも突き進んでいくことに成功している.このような生 物の模倣にとらわれないハードウェア設計がなされたシステムが急速に進化を遂げ,屋外自然環境 での実用化への期待が高まっている.
以上で挙げたものは地球上での運用を前提としたロボット例であるが,月・惑星探査においても,
脚式ロボットに期待できる高い踏破性能を発揮させようという試みは宇宙開発の比較的早い時期か ら行われていた.1960年代には,アメリカで無人月探査計画「Surveyor Program」に向けて,Fig.2.9 のようないくつかの歩行型ローバのコンセプトが示されて実用化の検討もされていた.しかし当時 は歩行型ロボットの研究自体が黎明期にあり,さらにロケットの打ち上げ能力が不足していたため,
結局はミッションの実現には至らなかった[56].その後は,地球上での運用経験が多かった車輪移動 が重点的に取り上げられ,旧ソ連のLunokhodシリーズやアメリカのLRVなどの車輪移動型ローバ が月面探査ミッションに投入されて,データとノウハウを積み重ねていった.そして1970年代から 1980年代にかけて,歩行機械システムの研究とアクチュエータや情報処理システムなどの要素技術 は徐々に進み,1990年代になってようやく宇宙ミッション用の歩行型ローバの研究が本格的に行わ れ始めた.アメリカのカーネギーメロン大学(CMU)では,Ambler(Fig.2.10),Dante I,Dante II
(Fig.2.11)といったいくつかの歩行型ローバが研究開発され,特にDante IIはアラスカのSpurr火 山火口を降りてガスを採取するという実地試験に成功した[57].また,Amblerは生物とは異なる構造 と歩容を採用することによって,歩幅の大きな移動が可能であった[58].しかし,これらは非常に大 型で,重量制約の厳しい宇宙ミッションに実用化するには問題があった.小型のシステムとしては,
マサチューセッツ工科大学(MIT)のHannibalおよびAttila [59] や,JPLのLEMUR (Limbed Excursion Mechanical Utility Robots) シリーズ [60] が研究されていた.また,日本ではISASが,Fig.2.12に示す ような車輪移動型ローバと歩行型ローバから成る協働ミッションの構想を提案し,検討を進めてい
た[61-63].この構想によると,比較的平坦な土地ではエネルギ効率の面で利点のある車輪移動方式を
採用した「Mother Rover」の上に昆虫のように6本の脚を有する歩行型ローバ「Daughter Rover」を 載せて長距離移動し,不整地に近くなると搭載されていた歩行型ローバが降ろされ,目的地である クレータ内部の探査を行う.異なる移動方式をもつ複数のローバが協調して探査を行うことで両者 の長所を生かす試みがなされている.2000年代に入ると,要素技術の劇的な発展などによって歩行 型ローバの小型化が実現できるようになり,歩行型ローバの宇宙ミッションへの投入が現実味を帯 びてきた.ドイツ人工知能研究センター(DFKI)ではFig.2.13の6足歩行ロボット「SpeceClimber」
[64] やFig.2.14の8足歩行ロボット「SCORPION」[65] など[66, 67] が研究された.そして,前述の6足
歩行ローバ「PTinto」が,世界初の歩行型惑星探査ローバとなるべく,火星探査を目指した開発が 進められるまでに至った.
Fig.2.1 AIBO ©SONY. Fig.2.2 TITAN-VIII ©Tokyo Institute of Technology.
Fig.2.3 BigDog ©Boston Dynamics. Fig.2.4 Tarry I & II ©University of Duisburg.
Fig.2.5 STriDer ©RoMeLa. Fig.2.6 Chariot III ©Chiba Institute of Technology.
Fig.2.7 TITAN X ©Tokyo Institute of Technology. Fig.2.8 RHex ©Boston Dynamics.
Fig.2.9 Concept model of ‘moon walker’ for Surveyor program. ©NASA/JPL
Fig.2.10 Ambler ©CMU. Fig.2.11 Dante II walking at Mount Spurr ©CMU.
(a) Mother Rover ©ISAS/JAXA (b) Daughter Rover ©ISAS/JAXA
(c) Collaboration between the two rovers Fig.2.12 Mother & Daughter Rover by ISAS/JAXA.
Fig.2.13 SpaceClimber ©DFKI. Fig.2.14 SCORPION ©DFKI.
crater flat terrain
tether
Daughter Rover Mother Rover
2.1.2 跳躍型ロボット
歩行を行う生物の中には,自身よりも大きな障害物を越えるため,すべての脚が移動対象面から 一時的に離れる跳躍移動をとるものもいる.歩行型ロボットに比べると数は少ないが,このような 跳躍移動を行うロボットについても研究開発がなされている.MITでは,歩行型ロボット研究への 第一歩として,最もシンプルな1脚ロボットによる跳躍移動に関する研究が行われた[68, 69].その後,
バッタやカエルの筋構造を模して,バネ[70] や圧縮空気[71, 72] によって駆動する脚をもつ跳躍ロボッ トについて研究・開発が行われた(Fig.2.15,Fig.2.16).しかし,跳躍型ロボットの場合,跳躍した 後に再び着地する際に,脚先が移動対象面上に接触できなければ,その後の跳躍が続けられなくな る.この問題を克服しようと試みたのが,Fig.2.17 に示すような等方脚配置ローバ[73, 74]である.こ のローバは,長手方向にのみ伸縮する数本の脚が,胴体から放射状に取り付けられた構造をもって いる.つまり,外観的にはウニと同じような形状をしているため,どのような姿勢で着地したとし ても,次の跳躍のための脚が移動対象面上に接触する.ただし跳躍型ロボットは,高重力環境では 強力なアクチュエータを用いなければ跳躍自体を達成することが難しい上に,着地時の衝撃も大き くなって故障の危険があるため,月や惑星の探査ローバとしては適当でなく,小惑星などの微小重 力天体への適用が妥当である.なお,このウニ型ローバは,脚の伸縮スピードが高速のときには跳 躍運動を行うが,脚の伸縮量が十分な場合,伸縮スピードを抑えていくと跳躍することはなく,い ずれかの脚をつねに移動対象面上に接触させつつ,ボールを転がすように胴体自体を進行方向に回 転させることで移動を達成することもできるので,「回転型ローバ」ともみなせる.
Fig.2.15 A miniature jumping robot. ©EPFL Fig.2.16 Air Hopper ©Tokyo Institute of Technology.
Fig.2.17 Hopping-type rover like a sea urchin ©Kyushu University.
2.2 脚式移動ロボットの制御システムとその課題
脚式移動ロボットの移動は,脚(脚関節)を操作することにより移動面からの反力を間接的に操 作し,胴体を推進させることで達成される.逆にいえば,移動面からの反力を操作することが不可 能になると,胴体を推進させることができなくなる.このような状態を引き起こすものが「転倒」
である.生物の構造は,移動性能を確保できる姿勢が決まっているため,転倒することによって,
この姿勢からはずれると移動不能な状況に陥る.生物の場合,万が一転倒した場合,目や手足,三 半規管などの感覚器を通じて,ただちに自身の姿勢を認識し,適切な起き上がり動作によって移動 能力が確保できる姿勢に復帰することができる.しかし,生物と同じような形態をもつローバにお いて,転倒後の復帰動作を行うためには,複雑な制御アルゴリズム(例外処理)の追加と,自身の 状態を正確に認識するための高精度なセンサが必要となる.したがって,ローバにとって転倒は可 能な限り避けるべき挙動であり,従来のローバでは,転倒しないような歩行アルゴリズム開発が重 大な研究課題となってきた.現在,2足歩行ロボットや4足歩行ロボットの動歩行に利用されてい るもので主流となっているのは,Zero Moment Point(ZMP)制御 [75] である.また,脚数が増える と支持脚が増える分,静的安定性は高くなるものの,スムーズな移動を実現するために,すべての 脚を協調的に制御する煩雑性が増す.さらに,脚数に限らず,未知で多様な路面状況に対して安定 的に移動できることが求められる.そこで,強化学習や遺伝的アルゴリズムなどによる歩容の進化 的獲得が試みられたり[76~78],生物の神経回路系を規範としたニューラルネットワークや Central Pattern Generator(CPG)などを利用することで,路面状況が変化しても,それぞれの脚の動きの位 相差を制御することで安定性を保ちつつ移動を達成するための方法が研究されている[79].このよう に,歩行型ローバを自律化させる上で,転倒は大きな障壁となっている.
生物の移動機構は,何億年という長い歴史の中で淘汰され,進化を経て獲得してきたものである.
さらに,生物は生まれた時から多くの経験を積むことで,各個体に適した運動を習得している.こ のような生物の移動機構を人工物であるロボットにそのまま適用したところで有効に機能すること が保証されるとはいえない.特に,歩行において致命的な挙動である転倒に対する身体各機構(感 覚器官,神経系,筋肉,骨格など)の相互作用には今なお未解明の部分が多い.機械という,生体 と比べるときわめて単純なシステムにおいて,生物のようにしなやかな歩行を再現するためには,
機構的にアクチュエータを多く備えて脚運動の自由度を増す必要があるが,アクチュエータが増え るほどそれらの協調制御が複雑になるので,滑らかな動きを実現するのは難しい課題である.突如 とした地面の沈下・変形・崩落に対して機敏に対応できる制御システムともなれば,周囲環境のあ らゆる変化も敏感に検知できるような高精度な環境認識システムの開発も必要となる.そのため,
これまでの歩行ロボットに関する研究の成果は実験室レベルあるいは人間が生活する整地環境にと どまるものがほとんどで,実地(不整地)での歩行ロボットの運用はいまだ十分とは言い難い状況 にある.このように,歩行型ローバは不整地への高い適応能力を期待されていながら,転倒の回避 という信頼性の面での問題が完全には解決されていないために,天体探査ミッションへの実用化が 停滞していると考えることができる.
ハードウェアとソフトウェアは互いに密接に関係している.いくら複雑精緻なソフトウェアを開 発したとしても,ハードウェアの性能に見合ったものでなければ,それを生かすことはできない.
逆に,適当なハードウェアさえ設計することができれば,ソフトウェアを簡略化することも可能で あると考えられる.歩行型ローバの信頼性を高めるためには,いかに簡単なソフトウェア=制御で 転倒を回避することができるかが重要なカギとなるから,それを実現できるハードウェアの設計に ついて改めて見直してみる価値がありそうである.さらに,環境認識精度が低くて多少制御を誤っ たとしても,移動能力が損なわれることのないロバストなシステムが実現できればなおよい.
2.3 月・惑星探査のために脚式ローバが備えるべき条件
ローバに限らず,宇宙ミッションで使用される機材において,重量は最重要項目として挙げるこ とができる.ローバは目的天体への着陸機にまずは載せられることになる.この着陸機は目的天体 への飛行を行う探査機と結合されて,ロケットによって宇宙へと打ち上げられる.ロケットが地球 大気圏外に到達すると,探査機は切り離されて目的天体までの飛行を開始する.飛行中,探査機は 軌道変更や着陸などのために,大量の燃料が必要となる.そのため,打ち上げには大型ロケットが 望ましく,ロケットの打ち上げ能力が限られる場合,探査機その他諸々のペイロードのうち,ロー バに許容される重量は相当限定される[80].重量にも付随する問題であるが,極限の小型化もローバ には求められる.ローバを載せた探査機はロケットのフェアリングに納められる.狭いフェアリン グの中にすべての機材を納めるために,ローバが専有できる空間は極めて限定されることになる[80]. また,打ち上げの際には,ローバを含めて探査機全体が加速と振動を受ける.このとき,ローバ の構成要素が共振して破損するおそれがあるため,装置には高い剛性が求められる[81].
そして,目的天体への着陸の際には,10 G以上の大きな衝撃力がかかる.この衝撃力によって,
ローバのアクチュエータなどの可動部は破損してしまう危険がある[81].可動部を1か所でも破損す ると,ローバの動きが限定的になって,最悪の場合にはローバ全体が動作しなくなる可能性がある.
また,ローバの活動環境は,細かい砂礫やレゴリスに覆われた土地である.これらがアクチュエー タに侵入すると,ギアの破損などを招いて故障の原因となるので,防塵・防砂のためのシーリング 加工は入念にしなければならない[80].こうした理由から,可動部はなるべく少ないほうがよいとさ れる.
以上は構造上の制約条件であるが,エネルギ的な観点からの制約条件も見逃せない.地球外天体 表面においてローバがエネルギとして利用できるのは,おもに太陽光発電によって得られる電気エ ネルギのみである(ボイジャー探査機やカッシーニ探査機などの外惑星探査機において,原子力電 池の搭載例もあるものの,ロケット打ち上げ失敗による放射能汚染の危険性から,太陽から相当離 れた場所の探査でない限り,原子力電池の使用は極力避けるべきである).この電気エネルギによっ て,ローバのアクチュエータ駆動だけでなく,地球や母船との通信,データ処理,ローバに搭載さ れた装置の熱制御,カメラ撮影などの多くの作業を賄うことになる.よって,限りあるエネルギを 有効に利用するため,エネルギ効率のよいシステムであることが望ましい.
以上のことと 2.2 節での議論を踏まえて,月・惑星探査に脚式ローバを適用するために必要な条 件を以下にまとめる.
(1) 軽量であること (2) 小型であること
(3) 可動部がなるべく少ないこと (4) 消費エネルギが抑えられること (5) 制御アルゴリズムが単純であること (6) 移動性能のロバスト性が確保されること
以上の点を考慮して,次章では月・惑星探査のための歩行型ローバについて,幾何学的な観点か らハードウェアを改良することについて検討を行う.
第 3 章
脚式ローバの形状
3.1 ローバの形状と転倒
2.1.1節で述べたように,従来の歩行型ロボットは生物を規範にして設計されることが多い.また,
歩行のメカニズムそのものの解明を目的とする場合においては,ロボットの形状は深く検討される ことがないのが実情のようで,とりあえず生物の機構を手本にしながらも,解析などが行いやすい 単純化されたモデリングがなされる.ここで手本とされる生物の外見的特徴としては,胴体の上下・
前後左右が明確に区別されていることが挙げられ,このことが転倒という概念を生じさせている.
前述のPTintoやDaughter Roverもまた同様な特徴をもっているが,地球とは異なる環境での活動を
行うことになる月・惑星探査ローバにおいては,形状的な観点から,従来の枠にとらわれない設計 が行える可能性がある.
転倒の問題を最もシンプルに解決するには,「転倒」という概念そのものをローバから排除できれ ばよい.そして,胴体があらゆる姿勢をとろうとも移動可能な状態にあり続けるようなローバは転 倒の概念のないローバといえる.このようなローバとして,文献[73],[74]ではFig.2.17に示すウニ のような形状をもったローバが提案された.このローバは,胴体が正十二面体となっており,その すべての面に対して垂直に伸縮する脚を備えている.この脚をゆっくりと伸縮させることで,移動 対象面に接触する脚を順次交代させて路面を押しながらサイコロが転がるように回転移動を行うこ とができる.また,脚を素早く伸縮させることで路面を蹴って胴体の跳躍を引き起こし,溝や岩石 などの障害物を飛び越えることができる.しかし,跳躍移動は本来,微小重力天体の探査で有効な 移動方式であり,ウニ型ローバが対象としていたのも小惑星などの微小重力天体であった.もっと 重力の大きな環境,すなわち月や惑星レベルの高重力天体で跳躍を起こそうとすれば,強力なアク チュエータが必要になる.また,跳躍が可能であったとしても,構造強度の面から天体表面への接 触時の破損の危険性が増すことから,月・惑星探査において跳躍は移動形態として不適当といえる.
さらに,跳躍移動自体に天体表面に接触する際の姿勢制御が難しいという課題もある.
また,Fig.3.1に示す大阪大学の腕脚統合型ロボット「ASTERISK」[82] は,胴体の前後左右方向に ついて等方に脚が配置されており(2次元等方脚配置),構造上は転倒しても(反転しても)歩行を 継続できるはずである.しかし,これを実際に行おうとすると,180 度という大きな姿勢角変動を 経るため,着地の衝撃が大きくなり,モータや内部CPUが破損して動けなくなってしまう危険があ る.
そこで本研究では,ウニ型跳躍ローバの形状をヒントとして,正多面体を脚配置のベースとした 3次元等方な脚配置をもつ歩行型ローバを考える.
歩行型ローバの移動とは,脚(脚関節)を操作することにより移動対象面からの反力を間接的に 操作し,胴体を推進させるものである.つまり,転倒しても歩行を続けるためには,胴体を推進し うる反力が得られるように,胴体の姿勢に関係なくつねに移動対象面に接触できていればよい.正 多面体の頂点は立体の中心に対して,3 次元等方に配置されている.その全ての頂点に回転関節を 使ったリンク機構をもつ脚を配置させれば,胴体がどのような姿勢になっても,いずれかの脚を必 ず移動対象面上に接触させることができる.つまり,前述のASTERISKが胴体の前後左右方向に対
して等方な位置関係に脚を配置しているのに対して,これに加えて上下方向についても等方な位置 関係になるように脚を配置させるのである.本研究では,このような3次元等方脚配置を有するロ ーバを取り上げる.以降,このローバを「3次元等方歩行型ローバ」と呼ぶことにする.
Fig.3.1 ASTERISK ©Osaka University.
3.1.1 脚の配置方法
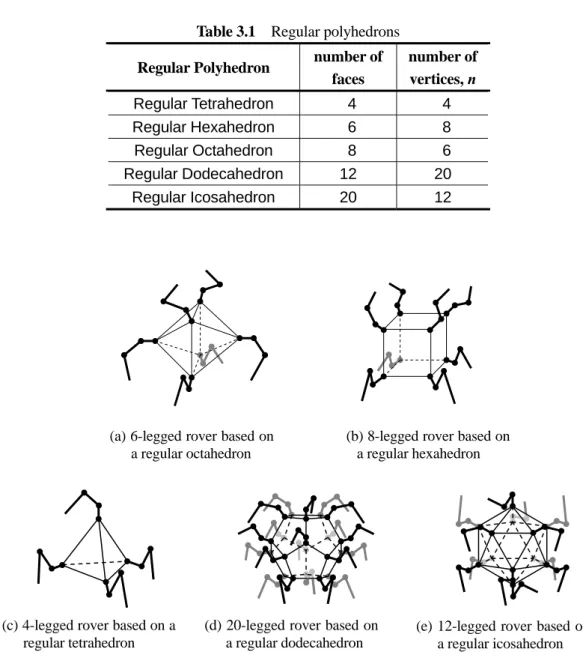
Table 3.1に示すように,正多面体は5種類しか存在しない.よって,正多面体のすべての頂点に
脚を配置した場合,脚数をnとするとn = 4, 6, 8, 12, 20の5種類のみが考えられる(Fig.3.2を参照 のこと).しかし,脚数が多くなるほど,これらを協調させて動かすための制御が複雑になる.また,
脚数の増加はローバ重量の大幅な増加を招くので,n = 12, 20の場合は脚数が過剰と判断できる.
n = 4の正四面体を脚配置のベースとした歩行型ロボットについては文献 [83],[84]で検討・開発
がなされていたものの,このロボットは前述のウニ型ローバのように胴体を回転させながら移動す ることが想定されていた.しかし,ローバには周辺環境を観測しながら移動することが望まれるた め,本件では,視界が安定的に確保されるように,歩行手法として一般的な4脚による通常の静歩 行ができることを前提条件とする.正四面体ベースの脚配置で4脚による天体表面への接触を実現 しようとすると,Fig.3.3のように天体表面からかなり離れた位置にある上部の脚が接触しにくくな る.また,胴体を回転させながら移動する場合も,相当な角度で脚の振り上げ・振り下ろしを行う 必要があるので,アクチュエータにかかる負担の大きさが懸念される.さらに,静歩行に必要な最 低限の脚数しか持たないので,転倒や転がり運動によって1脚でも破損すれば歩行不可能になる.
よって本研究では,Fig.3.4に示すような正八面体の各頂点に脚を配置した「6脚式ローバ」と,Fig.3.5 に示すような正六面体の各頂点に脚を配置した「8 脚式ローバ」を最終候補として以降の検討を進 めていく.ただし,ここでいう正多面体は胴体形状をそのまま表しているのではなく,脚配置のベ ースとしてのみ用いていることに注意されたい.なお,正多面体の各面に脚を配置させても3次元 等方脚配置となるが,この場合,脚数と面の数が一致するので,正六面体をベースとした6脚式ロ ーバと正八面体をベースとした8脚式ローバとなり,ベースとなる立体とローバが先ほどと逆転す る.
Table 3.1 Regular polyhedrons Regular Polyhedron number of
faces
number of vertices, n
Regular Tetrahedron 4 4
Regular Hexahedron 6 8
Regular Octahedron 8 6
Regular Dodecahedron 12 20
Regular Icosahedron 20 12
(a) 6-legged rover based on a regular octahedron
(b) 8-legged rover based on a regular hexahedron
(c) 4-legged rover based on a regular tetrahedron
(d) 20-legged rover based on a regular dodecahedron
(e) 12-legged rover based on a regular icosahedron
Fig.3.2 Schematic diagrams of the rovers considered in this study.
Fig.3.3 Landing posture of a 4-legged rover based on a regular tetrahedron.
6 5
2
4 1
view 1 3
6 5
2 4
1
view 1
6
3 4 1
view 2
view 2
Fig.3.4 Model of a 6-legged rover based on a regular octahedron.
5 6
2 1
8 7
4 3
view 2
6 5
2
1
view 1
view 1
8 5
1 4
view 2
Fig.3.5 Model of a 8-legged rover based on a regular hexahedron.
3.1.2 脚の構成
脚式ローバの脚はリンクとアクチュエータによって構成される.通常,脚運動の源であるアクチ ュエータとしては,回転関節か直動関節が用いられる.直動関節よりも回転関節の方が構造がシン プルで重量が小さいため,特に小型なシステムにおいては回転関節がよく用いられている.軽量化 の観点から,本研究においても回転関節をアクチュエータとして採用する.
脚配置を前節で述べたような構成にしているので,その利点を損なわないために,脚先の可動範 囲も3次元的に等方にカバーされるようなアクチュエータの配置を行わなければならない.よって,
脚の付け根にあたるアクチュエータには,胴体中心と脚の付け根を結ぶ直線を回転軸とする回転関 節を取り付ける(これを第1関節とする).そして,第1関節の回転軸に直交するような回転軸をも つ回転関節を1つ取り付ける(これを第2関節とする).この時点で,脚先の可動範囲は,第1関節 を中心とするある球面(2次元曲面)上になる.
ここで,この関節配置の妥当性を検証するため,ローバの機構の自由度について考察する[85].脚 式ローバの機構の自由度(運動の自由度)FKは次式で計算できる[86].
1
6 1
J
K i
i
F J N
f (3-1)ただし,Nは節(機構を連結する剛体;kinematic link)の数,Jは対偶(節を連結する関節部;kinematic
pair)の数, fiはi番目の対偶の自由度を表している.
天体表面に3脚支持状態で静安定性が保たれている場合,脚リンクに加えて胴体や天体表面も1 つの節と数えるので,脚数nを用いると,N2n 1 1 2n2,J 3 3 2(n 3) 2n3である.
また,天体表面に接触している点の対偶の自由度はそれぞれ3で,回転関節部の自由度はそれぞれ 1であるから,機構の自由度は
6 2 3 2 2 1 3 1 1 3 1 1 3
2 3
FK n n n
n
と計算される.その内訳は,胴体支持に関与していない(n3)本の遊脚の脚先位置自由度として
,胴体の位置あるいは姿勢の自由度として3である.つまり,1脚あたりを2関節で構成す ると,天体表面で3脚支持状態をとっているときには,胴体の座標と姿勢角はそれぞれ任意に設定 することができず,静歩行中,胴体の移動に伴って姿勢角がつねに変化していくことを示唆してい る.あるいは,天体表面で静止しながら岩石サンプルの採取などを行うために,所望の胴体姿勢を とろうとすると,足場と胴体の位置関係も変わってしまい,静安定性を失って転倒してしまうこと にもなりかねない.このような制約は,ローバが単に移動することだけを目的とするときには大き な問題とはならない.しかし,ローバの目的はあくまでも周辺環境の探査である.ローバに安全か つ円滑に探査ミッションを行わせる上では,上記のような制約は避けることが望ましい.
2(n3)
そこで,第2関節の回転軸と平行な回転軸をもつ回転関節をさらに1つ追加する(これを第3関 節 と す る ). す る と , リ ン ク が 各 脚 に 1 本 ず つ 追 加 さ れ る た め , ,
となる.よって,機構の自由度は
3 1 1 3 2
N n n
4 3 3( 3) 3 3
J n n
6 3 3 3 2 1 3 1 1 1 3 1 1 1 3
3 3
FK n n n
n
に増加する.その内訳は,胴体支持に関与していない(n3)本の遊脚の脚先位置自由度が3(n3), 胴体の位置自由度が3,胴体の姿勢自由度が3である.つまり,1脚あたりを3関節で構成すること によって,天体表面で3脚支持状態をとっているときには,胴体の座標と姿勢角をそれぞれ任意に 設定することができるようになる.なお,このような関節の配置の仕方は一般に垂直多関節型とよ ばれ,ヒトの腕に近い構造として産業用ロボットや歩行型ロボットにも広く用いられている.Fig.3.6