九州大学学術情報リポジトリ
Kyushu University Institutional Repository
振動刺激を用いた人関節動作変更量制御特性に関す る研究
本田, 功輝
https://doi.org/10.15017/4060162
出版情報:九州大学, 2019, 博士(工学), 課程博士 バージョン:
権利関係:
博士論文
振動刺激を用いた人関節動作 変更量制御特性に関する研究
本田 功輝
2020 年 1 月
九州大学大学院
工学府 機械工学専攻
1
目次
第1章 序論 ... 6
第1節 研究背景および必要性 ... 6
第1項 社会的背景... 6
第2項 運動機能に対する支援 ... 8
第3項 運動機能及び環境認知機能に対する支援としてのパワーアシストロボットを用いた認知アシスト ... 11
第2節 自身の筋力を活用した認知アシスト手法としての人体への振動刺激による動作変更の可能性 ... 13
第1項 人間の筋肉中の感覚器官および振動刺激による錯覚現象 ... 15
第2項 振動刺激によって生起する反射現象:緊張性振動反射(TVR) ... 20
第3節 本研究の目的と目標 ... 22
第4節 結言 ... 23
第2章 前腕回内・回外動作中の動作変更 ... 24
第1節 緒言 ... 24
第2節 基本的実験手法ならびに実験装置 ... 24
第1項 動作変更量の定量的評価手法 ... 24
第2項 実験装置... 25
第3項 被験者 ... 27
第4項 筋肉の刺激部位 ... 27
第3節 実験条件および実験手順 ... 30
第4節 実験結果... 32
第5節 結言 ... 37
第3章 肘関節動作変更の諸特性検討 ... 38
第1節 緒言 ... 38
第2節 基本的実験手法ならびに実験装置 ... 38
第1項 動作変更量の定量的評価手法 ... 38
第2項 実験装置... 38
第3項 被験者 ... 41
第3節 周波数変化が動作変更量に与える影響に関する評価 ... 41
第1項 実験の背景・目的 ... 41
第2項 実験条件および実験手順 ... 42
第3項 実験結果... 43
第4項 変化率を用いた周波数変化の動作変更量への影響の定量的評価 ... 47
第4節 振動刺激による動作変更の速応性に関する評価 ... 49
2
第1項 実験の目的... 49
第2項 実験条件および実験手順 ... 49
第3項 実験結果... 51
第5節 被刺激筋への負荷条件変化の動作変更への影響 ... 60
第1項 実験の目的... 60
第2項 実験条件および実験装置 ... 60
第3項 実験結果... 63
第6節 結言 ... 67
第4章 周波数変化による動作変更量制御実験 ... 68
第1節 緒言:実験の目的 ... 68
第2節 動作変更量制御手法の提案 ... 68
第3節 実験条件および実験手順 ... 69
第4節 実験結果... 72
第5節 提案手法による動作変更量制御の精度の検討 ... 80
第6節 結言 ... 83
第5章 まとめと今後の展望 ... 84
第1節 まとめ ... 84
第2節 今後の展望... 86
参考文献 ... 87
謝辞 ... 95
3
図目次
図 1-1 上肢外骨格型パワーアシストロボットによる食事動作の支援 ... 10
図 1-2 下肢外骨格型パワーアシストロボットによる歩行動作支援 ... 10
図 1-3 上肢外骨格型パワーアシストロボットによる”Task oriented perception-assist” ... 12
図 1-4 下肢外骨格型パワーアシストロボットによる段差乗り越えアシスト ... 12
図 1-5 下肢外骨格型パワーアシストロボットによる着座動作認知アシスト ... 12
図 1-6 人間の筋肉に対する振動刺激による動作変化... 14
図 1-7 新しい認知アシストの概念図(上)・予想図(下) ... 15
図 1-8 筋紡錘 ... 16
図 1-9 筋紡錘の発火頻度 ... 17
図 1-10 Goodwinらによる運動錯覚現象の発見 ... 18
図 1-11 上腕二頭筋への振動刺激による肘関節伸展運動時の動作変更生成メカニズム ... 19
図 1-12 TVRと運動錯覚による動作変更 ... 21
図 2-1 実験装置全景 ... 26
図 2-2 バイブレータ側面図(回転シャフトからエンコーダを取り外した状態) ... 27
図 2-3 回内運動時・回外運動時の刺激部位 ... 28
図 2-4 回外・回内運動時のバイブレータ取り付け位置... 29
図 2-5 振動刺激による回内動作変更実験結果 ... 34
図 2-6 振動刺激による回外動作変更実験結果 ... 36
図 3-1 実験装置全景 ... 40
図 3-2 実験装置の接続図 ... 40
図 3-3 バイブレータ ... 40
図 3-4 周波数変化実験の結果(代表例:被験者1) ... 46
図 3-5 各被験者における変化率の推移 ... 48
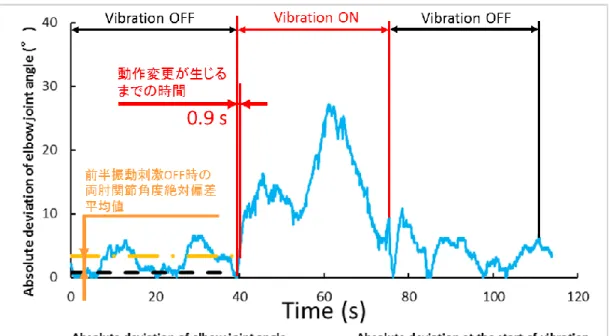
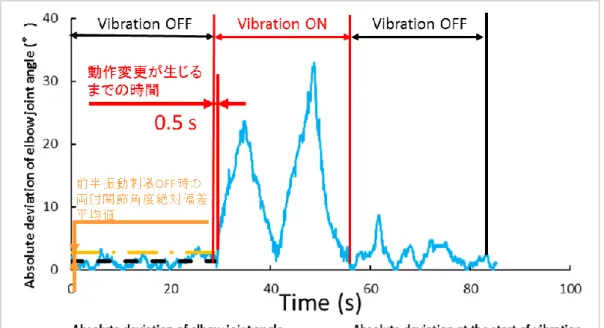
図 3-6 連続肘関節屈曲・伸展運動中の動作変更(被験者1) ... 53
図 3-7 動作変更が生じるまでの時間(被験者1) ... 53
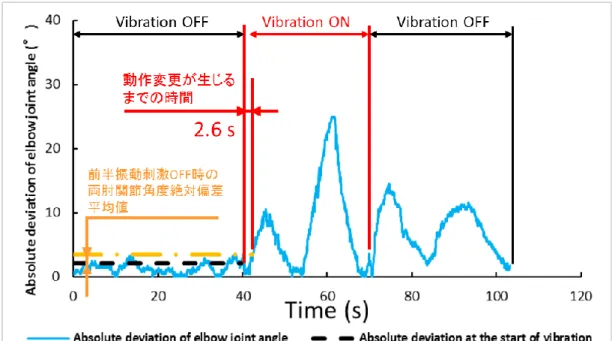
図 3-8 連続肘関節屈曲・伸展運動中の動作変更(被験者2) ... 54
図 3-9 動作変更が生じるまでの時間(被験者2) ... 54
図 3-10 連続肘関節屈曲・伸展運動中の動作変更(被験者3) ... 55
図 3-11 動作変更が生じるまでの時間(被験者3) ... 55
図 3-12 連続肘関節屈曲・伸展運動中の動作変更(被験者4) ... 56
図 3-13 動作変更が生じるまでの時間(被験者4) ... 56
図 3-14 連続肘関節屈曲・伸展運動中の動作変更(被験者5) ... 57
4
図 3-15 動作変更が生じるまでの時間(被験者5) ... 57
図 3-16 連続肘関節屈曲・伸展運動中の動作変更(被験者6) ... 58
図 3-17 動作変更が生じるまでの時間(被験者6) ... 58
図 3-18 連続肘関節屈曲・伸展運動中の動作変更(被験者7) ... 59
図 3-19 動作変更が生じるまでの時間(被験者7) ... 59
図 3-20 被刺激筋の負荷条件変化方法 ... 61
図 3-21 各負荷条件における肘関節伸展動作変更(被験者1) ... 64
図 3-22 各負荷条件における肘関節伸展動作変更変化率... 66
図 4-1 振動刺激周波数変化を用いた肘関節伸展動作変更量の制御 ... 69
図 4-2 目標軌道1,目標軌道2および非線形目標軌道... 70
図 4-3 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者1) ... 73
図 4-4 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者2) ... 74
図 4-5 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者3) ... 75
図 4-6 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者4) ... 76
図 4-7 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者5) ... 77
図 4-8 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者6) ... 78
図 4-9 (a)目標軌道1,(b)目標軌道2,(c)非線形目標軌道に対する肘関節伸展動作変更 量制御実験の結果(被験者7) ... 79
図 4-10 振動刺激なし条件下での肘関節伸展運動,絶対偏差平均値の算出手順 ... 82
図 4-11 振動刺激による動作変更量制御時のコントロールエラーの算出 ... 82
5
表目次
表2-1 被験者の詳細………29
表3-1 被験者の詳細………41
表3-2 振動刺激なし条件における肘関節角度差………....43
表3-3 各周波数における変化率平均値………...46
表3-4 肘関節運動開始から振動刺激開始までの区間における両肘関節角度差の平均値...50
表3-5 振動刺激開始から動作変更が生じるまでの時間………51
表3-6 本実験の負荷条件および周波数条件一覧...53
表3-7 被験者の詳細………54
表4-1 振動刺激なし条件下での両肘関節角度絶対偏差平均値,標準偏差...68
表4-2 各目標軌道に対する右腕(Vibrated arm)肘関節角度のコントロールエラー平均値,標準偏差...68
6
第1章 序論
第1節 研究背景および必要性
第1項 社会的背景
人間は日々の生活の中で,自身の身体に備わった「運動機能」と「環境認知機能」とを活 用しながら動作生成を行っている.運動機能とは,体の各部を動かすために必要な機能のこ とを指し,筋力の大きさや瞬発力といった能力に代表される.人間の動作時には,体の各部 の動きを把握するための感覚である運動感覚からの情報が求心性入力として中枢神経へと 伝達され,求心性入力を知覚した脳からの指令が遠心性入力として体の各部の筋肉へと伝 達されることによって動作生成を行っている.一方で,環境認知機能とは,視覚・聴覚・触 覚などの感覚により周囲の環境を認知するための機能であり,これらの感覚に基づく情報 も人間と周囲の環境との相互関係を把握する上で重要であり,日々の生活における動作生 成時に重要な役割を果たしている.
例として上肢を使用した作業について考えてみる.手でドライバを持ちネジをまわして 物を留めるという動作について考えてみると,まずドライバの先端とネジの先端との位置 関係を視覚によって把握した後に,筋肉を使用して肩・肘・手首などの関節角度を変化させ,
ドライバの先端をネジに押し当て作業を行う.このとき健常者においては,特別に肩・肘・
手首の関節角度を意識せずともこの作業を行うことができる.下肢を使用した歩行動作に おいても同様のことが言える.健常者においては,歩行中に股関節・膝・足首関節の関節角 度を,自らの筋力によって必要な角度まで変化させつつ歩行動作を行うことができ,段差な どの障害物を発見した際にも,これらの関節角度をたくみに調整して障害物の回避を行う ことができる.
このように,運動機能と環境認知機能を利用することによって,人間は,「物を持ち,目 標位置まで移動させる」・「障害物を避けながら歩行を行う」といった日々の動作を生成する ことができる.この二つの能力は車の両輪のように,人間が周囲の環境を適切に認識しつつ 動作を生成するために無くてはならない機能であり,どちらかが欠けても生活に支障をき たすこととなる.したがって,これら2つの能力のうち両方あるいはどちらか衰えている,
あるいは制限下におかれている場合,日々の生活において適切な動作を生成するためには 何らかの手段により,これらの機能の欠如を補うサポートを行う必要がある.
7
筋力・瞬発力といった運動機能が衰えた者の例としては,まず高齢者が挙げられる.内閣 府から発表されている高齢社会白書によると,日本における65歳以上高齢者人口は過去最
高の3,300万人となり,1950年から上昇を続けている[1].また,世界各国においても先進
国・開発途上国を問わず全人口に占める高齢者の割合は増加しており,今後も増加を続ける ものと考えられる[2].高齢になるにつれて,人間の運動機能は衰えを見せ,特に高齢者にお いては筋力の低下,瞬発力の低下などが見られるため,高齢者の身体能力を向上させること によって健康寿命を延ばし,高齢者の生活の質を向上させることが現在の課題となってい る[3].また,事故や疾病により運動機能が衰えることもある.例として,脊髄損傷・脳卒中 などにより半身麻痺などの後遺症が残った患者,あるいは,ALS(筋萎縮性側索硬化症)や筋 ジストロフィーなどの難病の患者が挙げられる.これらの患者は筋力が失われている,ある いは筋肉に動作指令を行う運動神経が途中で途絶しているため,上肢・下肢を使用した作業 が難しい.
一方で視覚・聴覚などの環境認知機能の衰え・制約要因には,加齢や障害による環境認知 機能の低下と,作業環境に起因する環境認知機能の制限とがある.高齢者においては,視覚・
聴覚・触覚といった環境認知機能が加齢と共に衰えている.また,障害については,白内障 や緑内障,糖尿病などの疾病および加齢などに起因する視覚障害などが挙げられる.一方,
作業環境に起因する環境認知機能の制限では,例として消防服や原発作業員の使用する防 護服など,顔を覆う防護服を使用した作業などが挙げられる.消防服や原発での防護服など では,装着者の体表面を保護する目的でゴーグルが取り付けられているものが多い.このよ うな視界の制限の下で障害物を避けながら歩行や工具を使用した作業を行うことを考える と,作業者の負担は相当に高いものであると予想される.
先に述べたような運動機能の衰え・環境認知機能の衰えや制約条件などは,同時に発生す ることも多い.例えば,高齢者・身体障害者においては筋力・瞬発力といった運動機能の低 下に加え,視覚や聴覚といった環境認知機能の衰えが著しい人もいる.高齢者の運動機能・
環境認知機能双方の衰えは,日々の動作において障害物などへの環境認知,回避動作が円滑 に行えないことによる転倒などの事故を招き,身体に障害を残すことがある.例えば,高齢 者の中には介護・支援が無ければ日常生活に著しく不便が生じる人々がおり,これらの人々 を厚生労働省では要介護者・要支援者と呼んでいる.平成28年国民生活基礎調査によると,
これらの人々が介護・支援が必要となった原因の上位に上がっているのが「骨折・転倒」で ある[4].転倒などによる事故は,骨折や後遺症などといった高齢者のその後の生活に著し く不便を生じさせる障害を残す可能性が高い.ひとたび要介護者・要支援者となってしまう
8
と高齢者の生活の質が低下してしまうため,高齢者の事故を防止する方策が求められてい る.
また,障害者においても,高齢者と同じように運動機能・環境認知機能の衰えに起因す る,動作時の不便が生じることがある.例として視覚障害者について考えてみる.現在日本 には31万人の視覚障害者がいるといわれている[5].視覚障害者の8割は,まったく目の見 えない盲目ではなく,若干の視力が残っている弱視である[5].そのため日常的に屋外で活 動する人も多く,約11万人がほぼ毎日外出するとされている.しかしながら,弱視であっ ても,視覚障害者にとって他の歩行者などの移動物,溝や小さな段差,頭部付近の枝や看板 などの障害物の認識は難しく,視覚障害者が単独で屋外を移動する際には常に危険と隣り 合わせの状態にある.さらに屋内においても,階段,部屋の敷居,梁など,視覚障害者にと って危険な障害物は多い.また,視覚障害者も,現在高齢化に伴い筋力などの運動機能の低 下した高齢障害者の人口も増加しており[5],今後はこのような障害者についても環境認知 機能のみならず運動機能へのアシストが必要となるであろう.
第2項 運動機能に対する支援
これまで,運動機能が低下し日常生活動作に障害のある人々の日常生活動作を支援する 目的で,松葉杖や車椅子などの道具が考案され広く使用されてきた.しかし,現在使用され ているこのような支援機器の問題として,使用する環境が限られる可能性があるというこ とが挙げられる.松葉杖や車椅子などを使用する際には,段差を回避するためのスロープや エレベータ,専用のトイレや駐車場など,それら必要とされる設備が整った環境が整備され ていることが望ましい.そういったいわゆるバリアフリー環境も近年整備されてきている ものの,十分とは言えない.また,病院や老人ホームなどの公共機関ではそのような環境が 整っていることが多いが,高齢者は日常生活を送る住居として自宅を希望する割合が高く,
既存の歩行支援機器を十分に活かせる環境にある要介護者の割合は低い.加えて,従来の支 援機器においては,上肢の運動機能を支援することを目的とするものが少ない.高齢者にお いては上肢の運動機能も低下し,脳卒中やALSなどの障害による運動機能の低下は上肢に おいても見られることを考えると,上肢身体機能への支援機器の開発が求められる.
そこで近年,既存の生活環境を変化させることなく上肢・下肢の運動機能の支援を行うこ とのできる機器として,パワーアシストロボットの利用に注目が集まっている.パワーアシ ストロボットとは人間の運動をアクチュエータからの外力などで補助するロボットのこと を指し,筋電や脳波などの生体電気信号を用いて使用者の意図する運動を生成するタイプ
9
や,外部からのスイッチによってあらかじめ決められた運動を生成するタイプなどがある [6]–[9].パワーアシストロボットは福祉用途の他に産業用途や軍事用途でも研究されている が[10], [11], [12],わが国では主に産業・農業・福祉分野での使用を主眼において研究が行わ れている.福祉分野におけるパワーアシストロボットの使用方法としては,介護支援用,リ ハビリテーション用,日常生活支援用といった用途があり,上肢・下肢の動作を支援する目 的でいくつかの外骨格型パワーアシストロボットが開発されている[8], [13]–[21].外骨格型 パワーアシストロボットはパワーアシストロボットの中でも特に衣服のように身体の外部 に装着することで装着者の動作を補助するロボットのことを指し,上肢や下肢に装着する ことによって日常生活と同様に道具の使用や歩行を行うことができる (図 1-1,図 1-2). そのため,外骨格型パワーアシストロボットは人間が生活するために形作られた環境の中 で用いるに適したシステムであると言える.
上肢外骨格型パワーアシストロボットにおいては,肩・肘・手首などの動作を支援するも のが研究されており,物の把持や道具の使用といった日常生活動作の支援から,麻痺患者の リハビリテーションなどまで広くその用途が検討されている.下肢外骨格型パワーアシス トロボットにおいては,主に歩行動作などの支援を目的としたものが多く,上肢と同様に日 常動作支援やリハビリテーションへの応用が検討されている.前述の外骨格型パワーアシ ストのうち,HALについてはALSや筋ジストロフィーなどの患者に対する歩行動作のリハ ビリテーションへの使用が有効であるため,2015年11月に保険適用が決定し,様々な利用 方法が考案されている[22]–[24].
10
図 1-1 上肢外骨格型パワーアシストロボットによる食事動作の支援 [25]
図 1-2 下肢外骨格型パワーアシストロボットによる歩行動作支援 [15]
11
第3項 運動機能及び環境認知機能に対する支援としてのパワーアシストロボ ットを用いた認知アシスト
環境認知機能が衰えている人々の日常生活動作を支援する機器についても様々なタイプ の物が使用されている.例えば,近視などの視力の低下に対しては古くから眼鏡が用いられ てきた.近年では視覚障害者の移動を支援する目的で,距離センサで障害物と使用者との距 離を計測し振動子によって障害物までの距離を使用者に伝達する電子白杖などの支援機器 の研究も行われている[26]–[29].また,加齢による聴力の低下に対しては補聴器の使用が広 く普及しておりこれも環境認知機能をアシストする機器であるといえる.
一方で,第一項で述べたように,運動機能と環境認知能力の両方が衰えているような高齢 者や障害者もいる.このような人々の日常生活動作を支援するためには運動機能と環境認 知機能をともに支援する必要がある.第二項において,運動機能の支援機器としてパワーア シストロボットの使用に対する期待が高まっていると述べたが,このパワーアシストロボ ットを用いて,運動機能のみでなく環境認知機能も支援しようとする研究が行われている.
木口らは,上肢外骨格型パワーアシストロボット使用時に手先の位置を目標となる位置へ と移動させる際に,上肢外骨格型パワーアシストロボットに取り付けられたステレオカメ ラで手先と目標位置と目標作業を認識し,目標作業を遂行するために必要な仮想外力を発 生する仮想トンネルを生成し,仮想トンネルから外れる動作を使用者が生成した際に自動 的にトンネル内に戻すような動作補正を行う手法を提案し,「認知アシスト」と呼称されて いる[15], [30]–[32](図 1-3).この認知アシストは下肢外骨格型パワーアシストロボットに おいても研究されており,レーザーレンジファインダによって障害物を検知し,装着者が歩 行時に段差などの障害物に気づかず危険動作を行う場合には自動的に動作を補正する認知 アシストや,椅子などへの着座動作時に,椅子の位置を誤って椅子の無い場所へ着座しよう としているときに,レーザーレンジファインダによって適切な位置に椅子がないことを認 識し,自動的に着座動作に切り替える認知アシストなどが提案されている[15], [33](図1-4,
1-5).
12
図 1-3 上肢外骨格型パワーアシストロボットによる”Task oriented perception-assist” [34]
図 1-4 下肢外骨格型パワーアシストロボットによる段差乗り越えアシスト [15]
図 1-5 下肢外骨格型パワーアシストロボットによる着座動作認知アシスト [33]
13
外骨格型パワーアシストロボットによる認知アシストの利点としては,通常の動作を行 っている際にはロボットからのアシスト力によって運動機能の支援を行い,危険動作時に はロボットがその危険を検知し,装着者が危険回避を行わない場合に自動的に動作を補正 するという,環境認知機能の支援も行うことができる点にある.このような認知アシスト機 能つき外骨格型パワーアシストロボットを装着することにより,運動機能および環境認知 機能の両方が衰えた高齢者や障害者の日常生活動作や,悪視界条件下で働く人々の活動を 支援することが可能となる.
第2節 自身の筋力を活用した認知アシスト手法としての人体への振動 刺激による動作変更の可能性
認知アシストの目的は,使用者の意図する動作が危険動作であった場合に,安全動作へと 補正することである.このとき,何らかの方法で使用者の危険な動作を変更する必要がある.
そのため,認知アシストを実施するうえで重要な技術要素のひとつは,使用者の動作を適切 な動作へと変更する技術である.パワーアシストロボットによる認知アシストでは,ロボッ トに取り付けられたアクチュエータからの外力によって動作補正を行う.木口らの研究で は,パワーアシストで使用するアクチュエータは,日常生活動作を支援するために比較的大 型で高出力のものが使用されており,7自由度の上肢外骨格型パワーアシストロボットの場 合,7個のアクチュエータを使用する.3自由度の下肢外骨格型パワーアシストロボットの 場合,両足で計6個のアクチュエータが使用されている.これらのアクチュエータを使用す ることにより,大きな外力で大きな動作補正を行うことができ,身体能力と環境認知能力が 共に低下している高齢者や障害者にとって日々の動作時の危険性を低減させることができ る可能性がある.
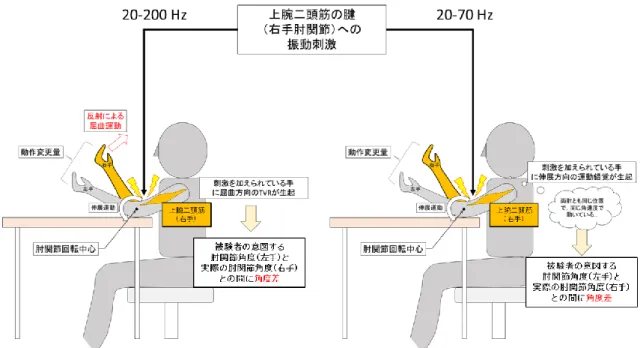
一方,人間の動作を意図する動作と異なった動作へと変化させる手法として,本田らによ って人体への振動刺激の利用が検討されてきた[35], [36].これらの研究では,認知アシスト への応用を目指し,アクチュエータからの外力によって動作を変更するのではなく,バイブ レータによる人体への振動刺激により生起される運動錯覚や筋反射などをもちいて,意図 する動作と異なった人間の動作を生成することを試みている.先行研究において本田らは,
人間の皮膚表面から筋肉に対して加えられた振動刺激により,人間の肘関節動作が,意図す る動作から変化することを発見した[35], [36].図1-6に示すように,振動刺激を肘関節伸展 運動中に上腕二頭筋へ印加すると,意図する肘関節運動とは異なった肘関節運動が生成さ れる.
14
この,振動刺激による動作変化手法を様々な関節運動へ適用し,変化量を制御しながら認 知アシストへ応用することができれば,図1-7に示すように人体に装着した複数のバイブレ ータのみを用いて使用者の筋力を活用しながら動作変更を行うことができる可能性がある.
これまでの研究により肘関節伸展運動[35]および肘関節屈曲運動[36]の動作を変化させる ことが可能であるとわかっているが,一方で,前腕の運動など,他の関節動作の動作変更を 行うことができるのかについては明らかとなっていない.また,認知アシストを実施する際 には,目標動作に向けて使用者の動作を制御する必要があるが,動作変更量の制御手法につ いてはまだ提案されていない.
動作変更量を制御する場合について検討する際には,この振動刺激による動作変更の生 成メカニズムに基づいて制御手法を検討しなければならない.振動刺激による動作変更は,
振動刺激を筋に加えるだけで人間の動作を動作意図から変更することができ,そこには運 動神経生理学的な効果が影響しているものと考えられる.そこで本章の以降の項では,振動 刺激を用いた動作変更の原因と考えられている「運動錯覚」と呼ばれる錯覚現象と,「緊張 性振動反射」と呼ばれる反射現象について神経生理学的側面から詳らかにし,その後に振動 刺激による動作変更の生成メカニズムについて説明し,動作変更量の制御方法の検討を行 う.
図 1-6 人間の筋肉に対する振動刺激による動作変化 [35]
上腕二頭筋への振動刺激
動作変化
15
図 1-7 新しい認知アシストの概念図(上)・予想図(下)
第1項
人間の筋肉中の感覚器官および振動刺激による錯覚現象振動刺激による動作変化の原因の一つとして考えられているのが,振動刺激を筋に加え ることによって生起する「運動錯覚」と呼ばれる現象である.この錯覚現象は,人間の筋の 中にあって筋の長さ変化や変化の速度を検知する感覚器官が振動刺激によって刺激を受け ることによって生起されると考えられている[37]–[39].ここでは筋肉中の感覚器官について 詳説した後に,錯覚現象の特性について説明する.
人間の運動感覚は,主に筋肉の中にある筋紡錘と呼ばれる受容器が,筋肉の伸びの変化を 受容することによって生じている.筋紡錘は図1-8に示すような,筋肉の腱周辺や筋腹に存 在するカプセル状の受容器である.筋紡錘の中には特殊な筋繊維である錘内筋繊維を有し,
筋肉の力を生み出す普通の筋繊維である錘外筋繊維と並行に並んでいる.この錘外筋が伸 縮するとき,即ち,筋肉が伸縮するとき,錘内筋も同時に伸縮を行う.筋紡錘の中には2つ
16
のタイプの神経終末が見られ,第一のタイプは一次終末であり,筋紡錘から骨髄を通じて脳 に情報を伝達するⅠa求心性神経に属する.一方で第二のタイプは,Ⅱ求心性神経に属して いる.
一次終末は筋肉の伸びと,伸びの速度に感受性が高い.図1-9 (a)は異なる速度で筋肉を伸 ばしたときの,典型的な一次終末の反応を示している.この図からわかるように,一次終末 の発火頻度は,伸びる前よりも伸びた後のほうが高い.このことから,一次終末は筋肉の伸 びに感受性が高いことがわかる.また,筋肉の長さが変わっているときにも発火の頻度が高 くなっている.筋肉の伸びの速度を速くするほど発火頻度が高くなっていることから,一次 終末は筋肉の伸びの速度にも感受性が高いことがわかる.一方で二次終末は,筋肉の伸びに ついてのみ反応する.このことは図1-9 (b)にあるように,筋紡錘の発火頻度が筋肉の伸びの 前後でのみ変化していることからわかる.
図 1-8 筋紡錘 [40]
17
(a)一次終末の発火頻度 (b)二次終末の発火頻度
図 1-9 筋紡錘の発火頻度 [41]
筋紡錘はごくわずかな筋肉の長さの変化をも知覚しうるほど敏感である.特に一次終末 はその変化の頻度が高いほど敏感であり,皮膚の上からの振動刺激によって刺激すること が可能であることがわかっている[37].振動刺激による筋紡錘の刺激では,刺激されている 体の部位のうちに関する感覚や速度に関する感覚が変化することが知られ,この現象が「運 動錯覚」と呼ばれている.運動錯覚は 1972 年にイギリスの神経生理学者である G. M.
Goodwinらによって発見された[37].Goodwinらは,被験者の右腕の,拮抗筋の状態にある
上腕二頭筋の腱周辺へ振動刺激を加えた.このとき,被験者には右手で感じている角度を左 手で表現するように指示していた.実験の結果,振動刺激を加えている間に左手の角度が 徐々に伸展方向に動いてゆくことが明らかとなった(図1-10).
Goodwin らが実験するまで,人間の運動感覚はどのように生成されているのかは運動神
経生理学における大きな論争の一つとなっていた.人間が運動を行うときに重要となる関 節の位置感覚は,関節受容器によって生成されているとする人々と,筋紡錘のような筋受容 器によって生成されているとする人々の間の論争に一つの解答を与えたのがこの Goodwin らの実験である.この研究により人間の運動感覚に対する筋紡錘の貢献度の大きさが明ら かとなったとともに,振動刺激による運動錯覚現象が発見された.
Goodwin による運動錯覚の発見後,この現象を利用して運動感覚の生起に関する事実が
解明されていった.1976年にはBurkeらによって,筋肉への振動刺激によってⅠa求心性繊 維が発火することが明らかとなり[39], [42], [43],その後Valboらによって,先に述べた運動
18
感覚の一部が筋紡錘からⅠa求心性繊維を伝わって中枢神経に伝達される事実判明した.一 方で,運動錯覚自体の誘発メカニズムについても研究が行われており,筋肉へ振動刺激を加 えた際に,脳内の運動野の活動が活発化することが知られている[44], [45].
これまでは主に神経生理学の分野で,人間の運動感覚がどのように生成されているのか,
ということを知るために利用されてきた運動錯覚だが,近年,他分野において運動錯覚を応 用しようとする取り組みも行われている.現在活発に研究が行われているのがリハビリテ ーションへの応用の検討である.脳卒中片麻痺患者などに対して,麻痺した体の部位を理学 療法士などが動かすことによって運動機能の回復を図る運動機能訓練が,以前からリハビ リテーションとして行われてきた.本多らや柴田らは,手首運動の運動錯覚を誘起させるこ とによって理学療法士に代わって運動機能訓練を実施することのできる装置の開発を目指 し,手首運動錯覚に関する基礎研究を行っている[46]–[48].また,梅澤らも同様にリハビリ テーションやバーチャルリアリティへの応用を目指し,肘関節運動に関する運動錯覚の基 礎研究を行っており[49], [50],Rinderknechtらは,手の把持動作のリハビリテーションの実 現を目指し,試作機の製作・評価実験を行っている[51], [52].
振動刺激による動作変更について考えると,Sittingらによって肘関節伸展運動中に上腕二 頭筋へ振動刺激を加えることによって運動錯覚が生じることが示されており[53], [54],関節 運動中の運動錯覚を利用することによって,図1-11 に示すように,使用者が関節運動中に 認識している関節角度・角速度と,実際の関節角度・角速度との間に差が生じ,その差によ って動作変更が生じている可能性がある.(図1-11は,肘関節伸展運動中に上腕二頭筋に振
図 1-10 Goodwinらによる運動錯覚現象の発見 [37]
19 動刺激を加えた場合の動作変更の模式図である)
興味深い特性として,運動錯覚の強弱は振動刺激の周波数変化によって操作することが できることが挙げられる.梅澤らによると,肘関節の上腕二頭筋に対する振動刺激によって,
肘関節伸展運動の錯覚を生じさせるために効果的な振動刺激の条件について,振動数が 70
[Hz]で振幅が0.45mm以上のとき,80-100%の割合で錯覚が生起することが明らかとなって
いる[49].また,J. P. Rollらの研究では,振動刺激の周波数が20 [Hz], 40 [Hz], 60-70 [Hz]と 増加するにつれて,被験者の知覚する錯覚量が大きくなることが明らかとなっている[38], [55]–[57].これらの先行研究により,周波数を変更することは運動錯覚の強弱を操作し,運 動錯覚を原因の一つとして生成される振動刺激による動作変更量を変化させる際に有効で ある可能性が示唆されている.
また一方で,運動錯覚は振動刺激が加えられる筋の緊張状態によってその錯覚の明瞭度 が変化することも報告されている[58]–[60].具体的には,振動刺激が加わる筋を意識的に収 縮させた状態では,運動錯覚の明瞭度が低下することが知られている.このことから,運動 錯覚が原因の一つとして生成されると考えられている振動刺激による動作変更もまた,動 作変更量が筋の緊張状態によって変化する可能性が示唆されている.
図 1-11 上腕二頭筋への振動刺激による肘関節伸展運動時の動作変更生成メカニズム
20
第2項
振動刺激によって生起する反射現象:緊張性振動反射(TVR)前節では,振動刺激を筋に加えた際に生じる運動錯覚について述べた.一方で,筋肉へ振 動刺激を加えると,運動錯覚だけではなく,反射現象も発生することが知られている.反射 とは,外部からの特定の刺激に対して,人間が意図せずに示してしまう反応を指す.一般的 に広く知られているのは,膝蓋をハンマーなどでたたいた際に膝関節が伸展方向に動いて しまう膝蓋反射現象などがある.
振動刺激による反射現象は緊張性振動反射(Tonic Vibration Reflex : TVR)とよばれ,1966
年に Eklund らによって発見された[61],振動刺激を加えられた筋肉が収縮現象を起こす反
射である.前節で紹介したGoodwinらの運動錯覚に関する実験でも,このTVRによる肘関 節屈曲運動の影響が見られ,振動刺激を加えられた直後から,振動刺激が加えられている腕 の肘関節が屈曲運動を生成した.Goodwinらは,このTVRによる屈曲運動を外部からの力 によって停止させたあと,刺激している腕に運動錯覚が生じることを確認している[37].
その後の研究により,TVR についてもその発生メカニズムについても解明されつつある
[62], [63].TVR の場合でも運動錯覚と同様に,振動刺激を加えた際に筋紡錘が発火するこ
とよって発生する.運動錯覚の場合は,このとき発火した求心性入力はそのまま脊髄を通し て中枢神経に達するが,TVR においては,この信号が脊髄を経由してそのままα運動ニュ ーロンを発火させ,振動刺激が加えられている筋肉の収縮を引き起こす.また,同時にその 筋肉に対する拮抗筋は弛緩し,全体としては関節運動が生成されることになる.
このように,振動刺激という入力に対しては,運動錯覚とTVRという異なった現象が誘 発される可能性がある.TVRは20-200 [Hz]の振動刺激によって誘発され,かつ,周波数が 増大すると反射量も大きくなることが知られている [62].この周波数帯は先述の,運動錯 覚を生起するための振動刺激の周波数帯と重複しているため,どちらかを選択的に刺激す ることは難しい.
しかしながら,本研究の目指す振動刺激を用いた動作補正・動作変更おいては,下図のよ うに運動錯覚によって生起される動作補正・動作変更の方向と,反射によって生起される動 作補正・動作変更の方向は同じであると考えられる.そこで,本研究においては,振動刺激 を加えた際に生じるのが運動錯覚であってもTVRであっても問題ないため,運動錯覚およ び/またはTVRにより動作変更が生じているものと考える(図1-12).
21
図 1-12 TVRと運動錯覚による動作変更
22
第3節 本研究の目的と目標
これまで,振動刺激を用いて人間の動作を意図する動作から変更可能であることを述べ た.また,この動作変更の原因として考えられる運動錯覚および緊張性振動反射の特性およ び動作変更の生成メカニズムについて述べ,運動錯覚や緊張性振動反射が振動刺激の周波 数によってその強度を増減可能な可能性が示唆されていることを示した.
本研究では,上肢を用いた作業時に認知アシストを実現することを目標に,基礎研究とし て以下の項目について検討を行う.
1. これまでに動作変更が可能であると確認された肘関節以外の上肢関節動作の動作変更 が可能であることを示す
2. 振動刺激による動作変更の諸特性について検討を行う.例えば,振動刺激のパラメータ が変化したときや,振動刺激が加えられる筋肉の状態が変化した際の動作変更への影 響を評価する
3. 振動刺激のパラメータを変更することにより,動作変更量を制御する手法を提案する
23
第4節 結言
本章では,環境認知機能が衰えた人間が日常生活動作を行う際に,障害物などを見落と すことなどにより発生する事故を防ぐための技術としての認知アシストについて説明し,
使用者自身の筋力を活用した認知アシストの手法として振動刺激による動作変更を活用し た認知アシストの実現可能性があることについて述べた.
これまでの振動刺激を用いた動作変更に関する先行研究においては,肘関節運動や膝関 節運動においてのみ振動刺激による動作変更が確認されている.振動刺激による認知アシ ストを実現するためには,他の関節動作においても動作変更が可能であることを確認する 必要がある.
また,振動刺激による動作変更を認知アシストへ応用するためには,動作変更量を何ら かの方法で制御する必要がある.これまでの研究では振動刺激により生成される動作変更 量を制御することは実現されていないが,動作変更の原因として考えられる運動錯覚と緊 張性振動反射の特性から,振動刺激の周波数などのパラメータを操作することによって動 作変更量を制御することができる可能性が示唆されているので検討する必要がある.
また,運動錯覚の特性から,振動刺激が加えられる筋の緊張状態によって動作変更量が 変化する可能性も示唆された.日常的な動作を考えると,筋の緊張状態は動作のタスクに よって刻々と変化するため,振動刺激による動作変更を上肢認知アシストへ応用するため には,筋への負荷条件による緊張状態の変化が動作変更量へ与える影響についても検討す る必要がある.
本研究では,これらの事柄について,特に上肢認知アシストの実現を目指して基礎的な 検討を行う.
24
第2章 前腕回内・回外動作中の動作変更
第1節 緒言
第一章で述べたように,振動刺激により生起される運動錯覚・緊張性振動反射などの現象 を用いて,人間の意図する関節運動と異なった運動を生成することができる.これまでの研 究により,人間の肘関節屈曲・伸展運動中に上腕二頭筋・上腕三頭筋へ振動刺激を加えるこ とによって,意図する関節動作と異なった関節動作を生成することに成功しており[35], [36],
下肢運動においても,膝関節伸展運動中にハムストリングへ振動刺激を与えることによっ て,意図する膝関節伸展運動とは異なった伸展運動を生成することができることが明らか となっている[64], [65].
上肢運動に着目すると,これまで肘関節屈曲・伸展運動に着目して動作変更の研究が行わ れてきたものの,他の上肢運動については,振動刺激による動作変更が可能であるか,明ら かとなっていない.上肢運動の中でも前腕の回内・回外運動はリーチング動作などを行う際 に重要な役割を果たしている.これまで,回内・回外筋への振動刺激によって運動錯覚また は緊張性振動反射が生じるかについての先行研究は報告されていない.また,振動刺激によ り動作変更が生じるかについても明らかとなっていない.
よって本章では,肘関節運動以外の上肢運動として前腕回内・回外運動に着目し,その動 作変更を人体への振動刺激によって実行することが可能であるか検討を行った.
第2節 基本的実験手法ならびに実験装置
第1項
動作変更量の定量的評価手法振動刺激による人間の動作意図からの動作変更量を定量的に評価するために,本田らに よって動作変更量の定量的計測手法が考案されている[35].この動作変更量計測手法につい て,先行研究で行われた肘関節動作を例として説明する.
被験者は両肘関節において,肘関節伸展動作を生成した.このとき,被験者の片側の腕に だけ振動刺激を与え,この腕をVibrated armと呼称する.もう片方の腕には振動刺激を与え ない.この振動刺激を与えない腕は,あらかじめ実験者により指示された角度域・角速度で 伸展運動を行い,被験者の肘関節動作意図の指標となる腕でありReference armと呼称され
25
る.被験者に対しては,「Vibrated armの肘関節動作をReference armの肘関節動作へ合わせ」
ながら肘関節伸展動作を行うように指示を与える.このような指示を与え,あらかじめ両肘 関節動作をあわせながら運動することができるように練習させることで,振動刺激が加わ った際の両肘関節動作の差を,振動刺激により生じた被験者の動作意図からの動作変更量 として評価することが可能となる.
本研究においては,この手法を前腕回内・回外運動に適用することによって,振動刺激に よる前腕回内・回外運動の動作変更量を定量的に評価した.すなわち,あらかじめ実験者に よって指示された角度域・角速度で前腕回内・回外運動を行うReference armと,振動刺激 を与え,Reference armと同様の回内・回外運動を行おうとするVibrated armとの前腕回内・
回外運動の差を計測することにより,前腕回内・回外動作変更量を定量的に評価した.実験 装置はこの動作変更量の定量的評価手法に基づいて実験を遂行することができるように製 作された.
第2項
実験装置図2-1へ実験装置の正面図ならびに側面図を示す.被験者は着座の状態で両肘関節を実験 台の上に置き,前腕回内・回外動作を行うことができる.被験者は,図2-1 (a)に示された実 験装置のゴニオメータのハンドルを両手で把持し,前腕回内・回外運動を行った.これらの ゴニオメータによって,前腕回内・回外動作中の回内・回外角度・角速度を計測した.振動 刺激はバイブレータによって,被験者の右腕に加えられた.被験者は左腕の前腕回内・回外 運動を基準として,右腕の動きを左腕に合わせながら回内・回外運動を行った.以降,本実 験では,右腕をVibrated arm,左腕をReference armと呼称する.
被験者が自身の運動感覚に基づいて前腕回内・回外動作を生成することができるように,
被験者の視覚と聴覚は遮断の状態で実験を遂行した.具体的には,聴覚フィードバックによ りバイブレータの ON/OFF や周波数の状態を把握することを防ぐために,被験者はヘッド フォンをした状態で実験を行った.また,視覚フィードバックにより両腕の回内・回外運動 を調整することを防ぐために,アイマスクによって視覚遮断の上で実験を行った.
実験装置の構成について詳説する.被験者の両腕に取り付けられたゴニオメータにはポ テンショメータ(ALPS, RDC501051)が取り付けられており,信号はマイクロコントローラ
(Arduino UNO)によってA/D変換された後にマイクロコントローラと接続したPCによっ て角度として記録された.
26
ゴニオメータの回転中心は被験者の前腕回内・回外運動の回転中心と一致するように位 置を調整することができる.被験者がゴニオメータのハンドルを把持して回内・回外運動 を行った.図2-1 (a)へ示されているように,両腕の手のひらを向かい合わせた状態を前腕 回内・回外角度の0 [deg]とし,回内方向を正回転,回外方向を逆回転として回内・回外角 度を定義した.
バイブレータはピストンクランクメカニズムを用いて振動刺激を生成する.図2-2に示さ れているように,DCモータ(Mabuchi motor, RS380-PH)に取り付けられた回転シャフトが回 転中心から 1 [mm] 離れており,その結果振幅 1 [mm]の振動刺激を生成することが可能で ある.DCモータにはエンコーダ(Copal electronics, RE12D-300-201)が取り付けられており,
このエンコーダからの信号は先述のマイクロコントローラへ伝達される.一回転につき300 パルスの信号が伝達され,142 [kHz]のサンプリング周波数でマイクロコントローラにより カウントされ,モータの回転数が算出される.この回転数を基に,制御周期0.05 [s]でモー タの回転数をPD制御することにより,振動子の加える周波数を制御した.接触子と被験者 の皮膚との接触は,図2-2に示すように,バイブレータが取り付けられたスライダに装着さ れた定荷重ばねによって保たれた.
(a)正面図 (b)側面図
図 2-1 実験装置全景
27
図 2-2 バイブレータ側面図(回転シャフトからエンコーダを取り外した状態)
第3項
被験者実験はこれまでに同様の実験に参加した経験がなく,健康な 4 名の男女に対して実施さ れた.(男性:3名,女性:1名)被験者の年齢・体重・身長・利き手・性別を表2-1へ示す.
利き手による影響を排除するために,本章で述べる実験は全て右利きの被験者に対して実 施された.また,本章で述べる実験はすべて九州大学大学院工学研究院の倫理委員会に申請 し,認可を得たプロトコルに基づくものである.
表2-1 被験者の詳細
Participant Age Weight (kg) Height (cm) Hand dominance Sex
1 24 63 167 Right Male
2 24 70 173 Right Male
3 18 60 178 Right Male
4 23 53 165 Right Female
第4項
筋肉の刺激部位運動錯覚および緊張性振動反射は,筋肉が拮抗筋として働いている際に振動刺激が加え られることによって生じる[37], [61], [66].振動刺激による動作変更もまた,拮抗筋として働 く筋肉に対して振動刺激を加えることによって生じることが知られている.例えば,肘関節 伸展運動中には拮抗筋の上腕二頭筋へ振動刺激が加えられると動作変更が生じる[35].
28
先述のように,これまで,回内・回外筋への振動刺激によって運動錯覚または緊張性振動 反射が生じるかについての先行研究は報告されていない.また,振動刺激により動作変更が 生じるかについても明らかとなっていない.したがって,回内・回外筋のどの部位に振動刺 激を加えれば動作変更が生じるかについては参考となる知見がない.
今回の実験では,触診により前腕における回内・回外筋の位置を特定し,図2-3へ示すよ うに,回内・回外筋の筋腹へ振動刺激を加えることにより動作変更の生成を試みた.実験装 置のバイブレータの取り付け位置は,回内運動の際には回外筋の上に,回外運動の際には回 内筋の上に接触するよう,図2-4へ示すようにその取り付け位置を調節した.
図 2-3 回内運動時・回外運動時の刺激部位
29
回外運動時:拮抗筋の回内筋に接触 回内運動時:拮抗筋の回外筋に接触 図 2-4 回外・回内運動時のバイブレータ取り付け位置
30
第3節 実験条件および実験手順
前節で述べた基本的実験手法および実験装置を使用して,前腕回内・回外運動を行ってい る際に振動刺激による動作変更を試みた.
〇実験中の回内・回外運動
実験中,被験者は決められた角度域で,一定の角速度の前腕回内・回外運動を生成した.
角度域は回内運動のとき,-45~45 [deg]であり,回外運動のとき,45~ -45 [deg]であった.ま た,角速度はこの角度域を10秒で回内・回外運動する角速度とし,9 [deg/s]とした.
〇提示した振動刺激条件
神経生理学での先行研究により,運動錯覚および緊張性振動反射はそれぞれ 20-70 [Hz],
20-200 [Hz]の振動刺激が加えられるとき,明瞭に生起するとされている [38], [62].第2節
4項で述べたように,回内・回外筋への振動刺激によって運動錯覚・緊張性振動反射が生起 するという報告はなされていないが,この周波数帯を参考として本研究では80 [Hz]の振動 刺激を加えることとした.また,振動刺激の振幅は,先述のバイブレータ中のピストンクラ ンク機構により,1 [mm]で一定に保たれた.
〇回内・回外運動の教示
本実験に臨む前に,被験者が決められた角度域で一定の角速度で前腕回内・回外運動を行 うことができるように,動作教示を行った.動作教示の手順を以下に説明する.
まず,実験者が被験者の左腕(Reference arm)の手首を把持し,9 [deg/s]で所定の角度域 において,前腕回内・回外運動を被験者に行わせた.このとき,被験者は左腕(Reference arm)
で感じている前腕回内・回外運動と同様の運動を右腕(Vibrated arm)で生成した.この練習 を繰り返し行い,被験者に所定の角速度・角度域で前腕回内・回外運動を行う練習を行った.
この練習の後に実験者による前腕回内・回外運動の教示なしで両腕において前腕回内・回外 運動を行わせ,所定の角度域・角速度で運動を行うことができることを確認し,本実験を行 った.
31
〇実験手順
本実験の手順を以下に示す.
<前腕回内動作変更の場合>
1. 前腕回内・回外角度を0 [deg]にし,角度の記録を開始した
2. 実験者は被験者の左腕(Reference arm)の手首を把持し,-45 [deg]まで回外させた.こ のとき,被験者は右腕(Vibrated arm)において左腕(Reference arm)で知覚した前腕回 外角度と同様の角度を生成した.
3. 右腕(Vibrated arm)への振動刺激を開始し,振動刺激の開始と同時に被験者は前腕回 内運動を開始した.
4. 被験者は左腕(Reference arm)の前腕回内角度が45 [deg]に達したと感じるまで前腕回 内運動を行い,被験者が前腕回内運動を停止した時点で振動刺激を停止し,角度の記録 を停止した.
<前腕回外動作変更の場合>
1. 前腕回内・回外角度を0 [deg]にし,角度の記録を開始した
2. 実験者は被験者の左腕(Reference arm)の手首を把持し,45 [deg]まで回内させた.この とき,被験者は右腕(Vibrated arm)において左腕(Reference arm)で知覚した前腕回内 角度と同様の角度を生成した.
3. 右腕(Vibrated arm)への振動刺激を開始し,振動刺激の開始と同時に被験者は前腕回 外運動を開始した.
4. 被験者は左腕(Reference arm)の前腕回外角度が-45 [deg]に達したと感じるまで前腕回 外運動を行い,被験者が前腕回外運動を停止した時点で振動刺激を停止し,角度の記録 を停止した.
32
第4節 実験結果
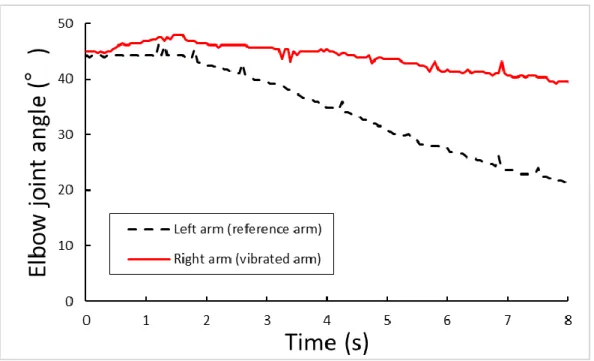
全被験者の回内・回外動作変更実験の結果を図2-5(回内動作変更実験),図2-6(回外動 作変更実験)へ示す.図中の赤色実線はVibrated arm(右腕)の肘関節角度の軌跡を示し,
黒色破線はReference arm(左腕)の肘関節角度の軌跡を示す.
全ての被験者において,回内動作変更実験,回外動作変更実験ともに,振動刺激開始直後
からVibrated arm(右腕)に回内・回外運動とReference arm(左腕)の回内・回外運動との
間に差が生じ始めている.被験者は実験前に,振動刺激が加えられ条件下で同じ角度域・角 速度の両腕前腕回内・回外運動を生成できていたことを考えると,振動刺激による動作変更 が生じたものであると考えることができる.
動作変更が生じる方向は,回内運動中は回外方向に動作変更が生じ,回外運動中は回内方 向に動作変更が生成されており,どちらも回内・回外動作を妨げる方向に動作変更が生じた.
先行研究においても,肘関節屈曲・伸展動作や膝関節伸展動作変更と同様の方向に動作変更 が生成されている.例えば,上腕二頭筋への振動刺激による肘関節伸展動作変更時には,屈 曲方向に動作変更が生じると報告されている [35].振動刺激による前腕回内・回外動作変 更も,他の部位と同傾向の方向に生じることが明らかとなった.
33
(a) 回外筋への振動刺激による回内動作変更(被験者1)
(b) 回外筋への振動刺激による回内動作変更(被験者2)
34
(c) 回外筋への振動刺激による回内動作変更(被験者3)
(d) 回外筋への振動刺激による回内動作変更(被験者4)
図 2-5 振動刺激による回内動作変更実験結果
35
(a) 回内筋への振動刺激による回外動作変更(被験者1)
(b) 回内筋への振動刺激による回外動作変更(被験者2)
36
(c) 回内筋への振動刺激による回外動作変更(被験者3)
(d) 回内筋への振動刺激による回外動作変更(被験者4)
図 2-6 振動刺激による回外動作変更実験結果
37
第5節 結言
上肢運動の中でも前腕の回内・回外運動はリーチング動作などを行う際に重要な役割を 果たしている.これまで,回内・回外筋への振動刺激によって運動錯覚または緊張性振動反 射が生じるかについての先行研究は報告されていない.また,振動刺激により動作変更が生 じるかについても明らかとなっていなかった.
本実験では,前腕の回内・回外運動に着目し,回外筋・回内筋への振動刺激による動作変 更を試みた.前腕回内運動中に拮抗筋の回外筋へ振動刺激を加え,前腕回外運動中に拮抗筋 の回内筋へ振動刺激を加えることにより,前腕回内・回外運動を被験者の意図する回内・回 外運動と異なった運動へ変更することに成功した.
本実験により,上肢運動の中で肘関節屈曲・伸展運動に加え,前腕回内・回外動作変更も 可能であると明らかになったことで,将来の振動刺激を用いた認知アシストにおいて,複数 の関節動作を伴った上肢タスクにおいても動作変更を行うことのできる可能性が示された.
38
第3章 肘関節動作変更の諸特性検討
第1節 緒言
第二章では,振動刺激を前腕回内・回外運動中に加えることにより,前腕回内・回外動作 が変化することに成功した.
一方で,振動刺激による上肢認知アシストを実現するためには,動作変更量をなんらかの 方法で操作することも必要となる.ここで,第一章で述べたように,振動刺激による動作変 更の原因として考えられている運動錯覚・緊張性振動反射は,振動刺激の周波数変化によっ てその強弱が変化することが知られている.この性質に着目すると,振動刺激によって生成 される動作変更の変更量もまた,振動刺激の周波数変化によって操作することができる可 能性がある.
本章では,これらの背景を踏まえ,振動刺激の周波数を変更することにより動作変更量を 変えることができることを確認する.さらに,動作変更の速応性についても評価を行う.最 後に,被刺激筋の負荷条件変化が動作変更量へ与える影響を検討する.本研究では,上肢運 動の中でも特に肘関節伸展運動に着目し,上記の検討を行った.
第2節 基本的実験手法ならびに実験装置
第1項
動作変更量の定量的評価手法前腕回内・回外動作変更の定量的評価と同様に,本実験においても,振動刺激を加えず,
被験者の動作意図を示すReference armと,振動刺激を加え,動作変更を行うVibrated armを 用いて肘関節運動の動作変更量を定量的に評価した.実験装置はこの動作変更量の定量的 評価手法に基づいて実験を遂行することができるように製作された.
第2項
実験装置図3-1に本実験で使用した実験装置の正面図ならびに側面図を示す.被験者は着座の状 態で肘関節を実験台の上部に置き,肘関節伸展運動を行うことができる.両肘関節にはゴ ニオメータが取り付けられており,被験者の両肘関節の角度ならびに角速度を計測するこ とができる.振動刺激はバイブレータによって被験者の右腕(Vibrated arm)に加えられ
39
た.被験者は左腕(Reference arm)の肘関節伸展動作に対し,右側の振動刺激が加えられ た腕(Vibrated arm)の肘関節伸展動作をあわせながら伸展運動を行った.
被験者が運動感覚に基づいて肘関節伸展運動を生成することができるように,被験者の 視覚と聴覚は遮断の状態で実験を遂行した.具体的には,聴覚フィードバックによりバイ ブレータのON/OFFや周波数の状態を把握することを防ぐために,被験者はヘッドフォン をした状態で実験を行った.また,視覚フィードバックにより両肘関節運動を調整するこ とを防ぐために,アイマスクによって視覚遮断の上で実験を行った.
実験装置の構成について詳説する.被験者の両腕に取り付けられたゴニオメータにはポ テンショメータ(ALPS, RDC501051)が取り付けられており,信号はマイクロコントロー ラ(Arduino UNO)によってA/D変換された後にマイクロコントローラと接続したPCに よって角度として記録された.実験装置の接続図を図3-2に示す.ゴニオメータの回転中 心は被験者の肘関節回転中心と一致するように位置を調整することが可能である.ゴニオ メータと被験者の前腕の固定部は緩衝材で被験者の前腕を挟み込むかたちで固定された.
被験者の肘関節を伸展させ,被験者の肘関節が置かれた実験装置の台に前腕が接触する肘 関節角度を0 [deg]として肘関節角度の計測を行った.
バイブレータは被験者の右腕に接触することができるように実験装置のフレームに対し て取り付けられ(図 3-3(a)),ピストンクランク機構を用いて振動刺激を生成した.このピ ストンクランク機構は,図3-3(b)に示されているように,DCモータ(Mabuchi motor, RS380-
PH)に取り付けられた回転シャフトが,回転中心から 1 [mm] 離れており,その結果振幅 1
[mm]の振動刺激を生成することが可能である.DCモータにはエンコーダ(Copal electronics,
RE12D-300-201)が取り付けられており,このエンコーダからの信号は先述のマイクロコン トローラへ伝達される(図3-2).一回転につき300パルスの信号が142 [kHz]のサンプリン グ周波数でマイクロコントローラによりカウントされ,モータの回転数が算出される.この 回転数を基に,制御周期0.05 [s]でモータの回転数をPD制御することにより,振動子の加 える周波数を制御した.接触子と被験者の皮膚との接触は,図3-3(a)に示すように,バイブ レータが取り付けられたスライダに装着された定荷重ばねによって保たれた.
40
図 3-2 実験装置の接続図
(a) 実験装置への装着 (b) ピストンクランク機構
図 3-3 バイブレータ
(a) 正面図 (b)側面図
図 3-1 実験装置全景
41
第3項
被験者運動錯覚や緊張性振動反射の生起特性に関する神経生理学の分野における先行研究にお いては,5-30 名程度の,健康で実験参加経験のない両性別の被験者らで実験を行っていた [37], [38], [48], [50], [61].本実験では,振動刺激による動作変更特性を詳細に検討するため に,同様の実験に参加した経験がなく,健康な7名の男女に対して実施した.(男性:5名,
女性:2名)被験者の年齢・体重・身長・利き手・性別を表3-1へ示す.利き手による影響 を排除するために,本章で述べる実験は全て右利きの被験者に対して実施された.また,本 章で述べる実験はすべて九州大学大学院工学研究院の倫理委員会の認可を得た実験である.
表3-1 被験者の詳細
Participant Age Weight (kg) Height (cm) Hand dominance Sex
1 23 62 165 Right Male
2 23 62 178 Right Male
3 25 70 173 Right Male
4 23 59 173 Right Male
5 23 81 170 Right Male
6 26 47 160 Right Female
7 25 49 161 Right Female
第3節 周波数変化が動作変更量に与える影響に関する評価
第1項
実験の背景・目的第一章で述べたように,振動刺激の周波数が変化するとき,運動錯覚や緊張性振動反射の 強さもまた変化することが知られている.例えば,運動錯覚現象は20-70 [Hz]で周波数が変 化する際に錯覚の明瞭度が増加することが知られている[38].また,緊張性振動反射は 20- 200 [Hz]で振動刺激の周波数が変化するとき,反射の強さが増大することが知られている [61].
一方,振動刺激によって人間の関節運動を,本人の意思と関係なく変更することが可能で あるが,この動作変更は振動刺激によって生起される運動錯覚や緊張性振動反射が原因と 考えられている.そのため,振動刺激による動作変更量もまた,振動刺激の周波数を変更す ることによって操作することができる可能性がある.本節の実験目的は,振動刺激による動 作変更量が振動刺激周波数の変化によって操作可能であることを確認することにある.
![図 1-1 上肢外骨格型パワーアシストロボットによる食事動作の支援 [25]](https://thumb-ap.123doks.com/thumbv2/123deta/9807702.1884840/12.892.195.709.177.528/図11上肢外骨格型パワーアシストロボットによる食事動作の支援.webp)
![図 1-3 上肢外骨格型パワーアシストロボットによる ”Task oriented perception-assist” [34]](https://thumb-ap.123doks.com/thumbv2/123deta/9807702.1884840/14.892.157.735.156.385/図13上肢外骨格型パワーアシストロボットによるTaskorientedperceptionassist34.webp)