九州大学学術情報リポジトリ
Kyushu University Institutional Repository
絶滅した長頸竜類の遊泳性能に関する研究
松岡, 晃史
https://doi.org/10.15017/4060210
出版情報:九州大学, 2019, 博士(工学), 課程博士 バージョン:
権利関係:
絶滅した長頸竜類の遊泳性能に関する研究
令和2年1月
松岡 晃史
目次
第1章 緒言 ... 1
1.1 背景と目的 ... 1
1.2 研究の手法 ... 2
1.3 論文の構成 ... 3
付表(Table 1.1) ... 4
付図(Fig. 1.1~Fig. 1.6) ... 5
第2章 運動方程式 ... 8
2.1 座標系とオイラー角 ... 8
2.2 運動方程式 ... 8
付表(Table 2.1) ... 10
第3章 流体力計算 ... 11
3.1 静的計算の概略と計算処理 ... 12
3.1.1 𝑥軸並進抵抗計算 ... 12
3.1.2 𝑧軸並進抵抗計算 ... 12
3.1.3 迎角変更計算 ... 13
3.1.4 左右同位相鰭角変更計算 ... 14
3.1.5 𝑦軸並進抵抗計算 ... 15
3.1.6 斜航角変更計算 ... 16
3.1.7 左右反位相鰭角変更計算 ... 17
3.2 動的計算の概略と計算処理 ... 18
3.2.1 フーリエ級数展開 ... 18
3.2.2 強制サージ計算 ... 18
3.2.3 強制ヒーブ計算 ... 20
3.2.4 純ピッチ計算 ... 21
3.2.5 強制スウェイ計算 ... 22
3.2.6 強制ロール計算 ... 23
3.2.7 純ヨー計算 ... 24
3.3 遊泳速度の決定 ... 26
3.4 CFDによる流体力計算の条件 ... 26
3.4.1 計算領域の仕様 ... 26
3.4.2 境界条件 ... 27
3.4.3 乱流条件 ... 27
3.4.4 メッシュ条件 ... 27
3.5 静的計算の結果 ... 28
3.5.1 𝑥軸並進抵抗計算 ... 28
3.5.2 𝑧軸並進抵抗計算 ... 29
3.5.3 迎角変更計算 ... 29
3.5.4 左右同位相鰭角変更計算 ... 30
3.5.5 𝑦軸並進抵抗計算 ... 30
3.5.6 斜航角変更計算 ... 31
3.5.7 左右反位相鰭角変更計算 ... 31
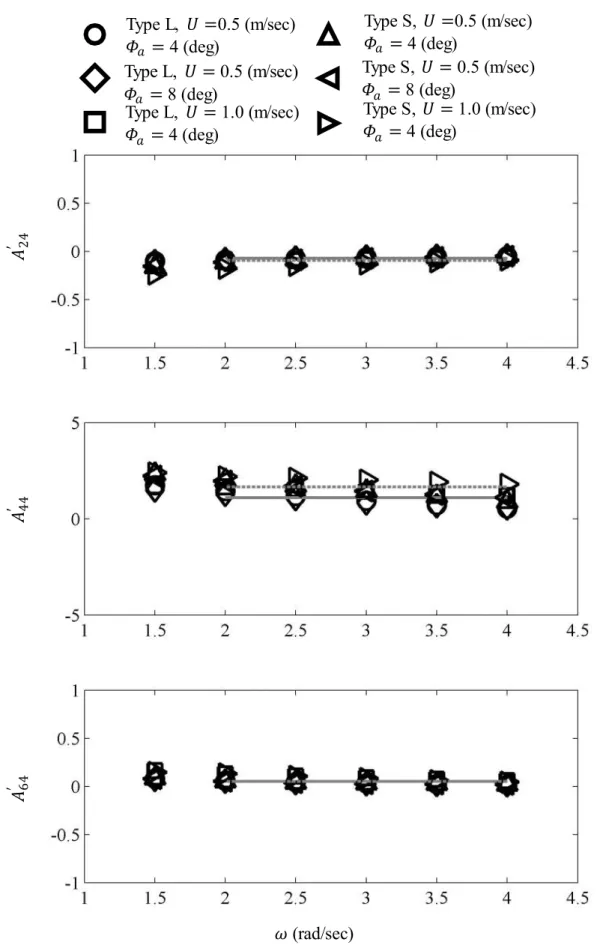
3.6 動的計算の結果 ... 32
3.6.1 強制サージ計算 ... 32
3.6.2 強制ヒーブ計算 ... 33
3.6.3 純ピッチ計算 ... 33
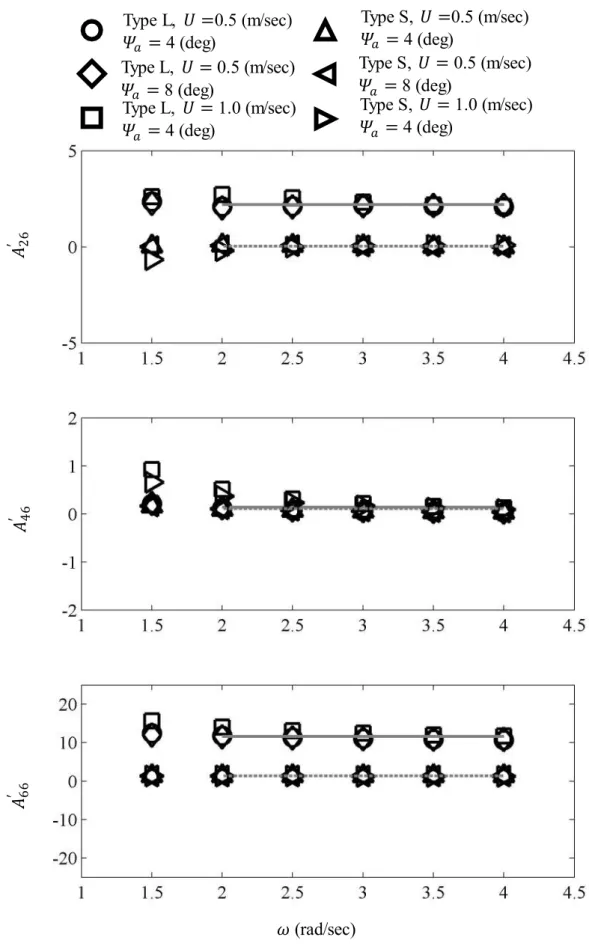
3.6.4 強制スウェイ計算 ... 34
3.6.5 強制ロール計算 ... 35
3.6.6 純ヨー計算 ... 35
3.7 第3章のまとめ ... 36
付表(Table 3.1~Table 3.5) ... 39
付図(Fig. 3.1~Fig. 3.44) ... 44
第4章 滑空遊泳シミュレーション ... 86
4.1 平衡状態の検討 ... 86
4.2 積分方法と時間ステップの検討 ... 87
4.3 縦方向滑空シミュレーション ... 87
4.4 安定性の検討 ... 88
4.5 制御手法 ... 90
4.5.1 PID制御器(古典制御理論)によるシミュレーション ... 90
4.5.2 LQI制御器(現代制御理論)によるシミュレーション ... 90
4.5.3 制御器の選択について ... 95
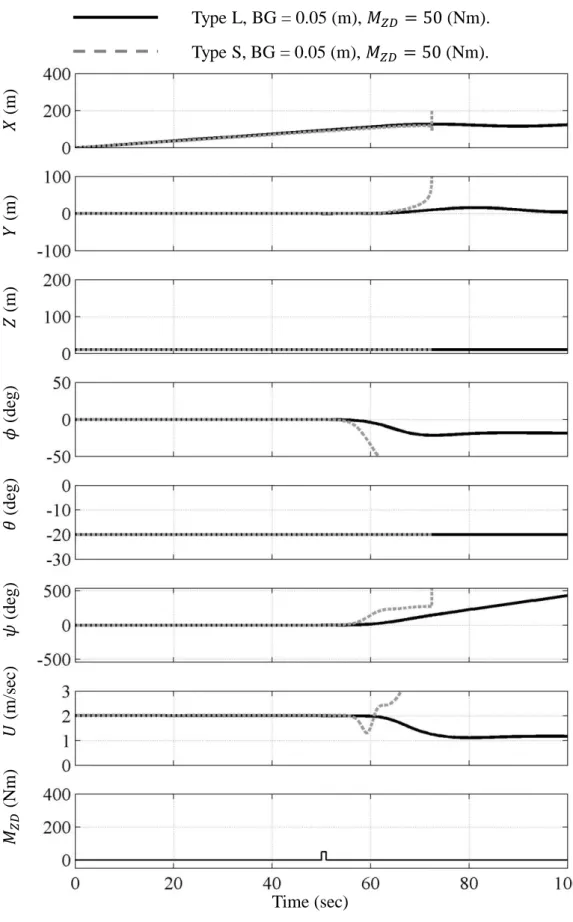
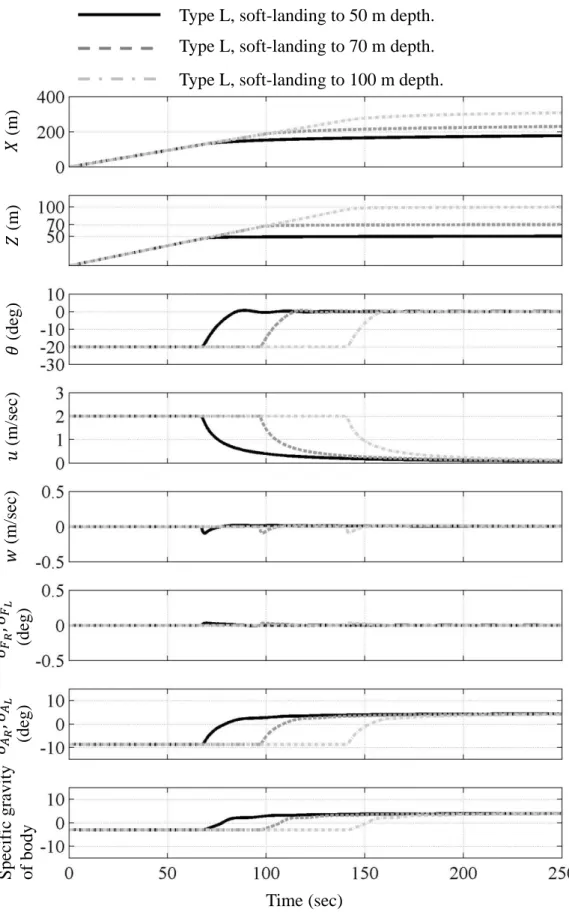
4.7 海底着底シミュレーション ... 96
4.8 旋回滑空遊泳シミュレーション ... 96
4.8.1 ヨー角変更(ステップ入力)シミュレーション ... 96
4.8.2 ヨー角(ランプ入力)シミュレーション ... 97
4.8.3 ロール角変更(ステップ入力)シミュレーション ... 98
4.9 第4章のまとめ ... 99
付表(Table 4.1) ... 101
付図(Fig. 4.1~Fig. 4.38) ... 102
第5章 前進速度の計算 ... 139
5.1 前進の方法 ... 139
5.2 計算条件 ... 140
5.3 鰭の動きで得られる前進速度の結果 ... 141
5.4 第5章のまとめ ... 142
付図(Fig. 5.1~Fig . 5.22) ... 143
第6章 滑空遊泳に至るまでの移行期の遊泳 ... 165
6.1 移行期のシミュレーション ... 165
6.2 被制御変数が1つだけの場合 ... 166
6.3 被制御変数を2つに増やした場合 ... 166
6.4 第6章のまとめ ... 167
付図(Fig. 6.1~Fig. 6.36) ... 168
第7章 結言 ... 204
謝辞 ... 211
参考文献 ... 212 図表一覧 ... 215
第1章 緒言
1.1 背景と目的
本研究の目的は長頸竜類の遊泳性能を精緻に裏付けることにある.長頸竜類 とは中生代を生きた水棲爬虫類である.中生代とは,地質時代の区分の一つであ り,三畳紀・ジュラ紀・白亜紀の三つの紀から成る.長頸竜類は,中生代には地 球の各地に生息していたが,白亜紀末には絶滅したと考えられている 1, 2 ) ため,
長頸竜類の生態を観察によって解明することは不可能である.
絶滅した長頸竜類の生態を解明すべく古生物学者たちは努力を重ねてきた3, 4,
5 ).彼らの主なアプローチは化石を発掘し,その化石を解釈するものである.こ の科学的なアプローチは長頸竜類の生態を解明しつつあるが,流体工学的・制御 工学的な裏付けに乏しいと言える.
船舶海洋工学分野では,海中を航走する水中ビークルの開発が進められてい
る6, 7 ).水中ビークルの開発には流体工学的・制御工学的アプローチが用いられ
ている8 ).このアプローチでは,まずCFD(Computational Fluid Dynamics)に より,水中ビークルに働く流体力が計算され,運動方程式を構成する各種流体力 係数が導出される 9, 10 ).次に運動方程式を数値積分することにより水中ビーク ルの運動が計算される.運動方程式(数学モデル)はモデルベースの制御器の設 計にも使用される.計算で得られた運動性能を検討した結果が水中ビークル設 計にフィードバックされ,様々な水中ビークルの開発が行われている8, 9 ).
また,船舶海洋工学分野の研究者たちは水棲生物の遊泳について理解を深め ようと努力している11 ) .水棲生物の遊泳を明らかにすることを通して,より効 率の良い推進装置の開発を行おうとする試みである.船舶海洋工学に限らず,航 空工学においても,空を飛ぶ鳥類の羽ばたきによる飛翔を空気力学的視点から 明らかにしようとする試みがなされている 12, 13, 14 ) .これらは水棲生物の遊泳や 鳥類の飛翔を数理モデルで明らかにする試みであり,実際に海亀を遊泳させて みてその特性を調べる研究 15 ) ,魚型ロボットや機械を製作することで水棲生物 の遊泳を模擬する研究 16, 17, 18),CFD によって水棲生物の遊泳を明らかにしよう とする研究19, 20, 21 )などが行われてきた.
長頸竜類については,滑空運動の安定性と鰭のコード長などの諸元を流体工 学的アプローチから考察する研究がすでに行われている1, 2)が,頸長頸竜類の遊
泳をシミュレーションにより再現したものではない.本研究では,頸の長い長頸
竜 Hydrotherosaurus と頸の短い長頸竜 Stenorhynchosaurus に対して流体工学
的・制御工学的アプローチを適用することで,二種類の長頸竜の遊泳性能がどの ように異なるかを明らかにする.本研究によって,化石の解釈から得られた長頸 竜類の遊泳性能が精緻に裏付けられる.
1.2 研究の手法
本 研 究で は 長 頸竜の Hydrotherosaurus 3 )と Stenorhynchosaurus( 旧名 : Brachauchenius)4 ) の二種類の遊泳性能を比較する.Fig. 1.1にHydrotherosaurus の標本骨格を示し,Fig. 1.2にStenorhynchosaurusの化石発掘風景を示す.前者 は長い頸部と小さな頭部を特徴としており,後者は短い頸部と大きな頭部を特 徴としている.化石の解釈からこれらの長頸竜は形状が異なるだけではなく,生 態と捕食活動も異なっていたことが分かっている 1, 2 ) .Hydrotherosaurus は水 中を海底に向かって遊泳してから,海底に生息する貝類などの海棲生物を口で すくい取って捕食していたと推定され,Stenorhynchosaurus は水中を鰭を絶え ず使って泳ぎ回りながら,海棲生物を捕食したと推定されている.このことから 長頸竜類の形状の違いと生態は密接に関わっていたと考えられる.長頸竜類の 捕食活動の概念図をFig. 1.3に示す.
望月は化石に肉付けすることによりHydrotherosaurusとStenorhynchosaurus を剛体モデルにモデル化している1, 2)ので,本研究ではこの剛体モデルを使用す ることにし,L型・S型モデルと呼ぶことにする.Fig. 1.4に長頸竜類モデルの概 形を示す.L型・S型ともに,胴体は回転体であり,四枚の鰭はそれぞれ上下対 称翼にモデル化されている.L型とS 型では全長に対する頸部の比率が異なり,
化石を考慮しL型では頸部が長く, S 型では短くなっている.鰭は胴体から伸 びる鰭の前方から 1/4 翼弦長にある鰭軸を中心に回転できる.鰭の断面形状に つ い て は NACA0012,NACA0020,NACA0033 の 三 種 類 が 検 討 さ れ た 結 果 NACA0020 が最も最適 1, 2 ) とされているので,本研究でもこの断面形状を用い ることにする.長頸竜類モデルは剛体モデルであり,頸部はまっすぐに固定され ている.これは,Fig. 1.5に示した長頸竜類(Muraenosaurus)骨格のスケッチか らも分かるように,頸部の骨は互いにがっちりと組み合わさっており,容易に動 かないと考えられているからである 5 ) .
この剛体モデルを用いて長頸竜類の遊泳を数値シミュレーションする.水中
ビークルと同様に,長頸竜類モデルの運動方程式を構築するが,この運動方程式 の質量行列と外力ベクトルには流体力係数が含まれる.これらの流体力係数は CFD で長頸竜類モデルに働く流体力計算し,得られた流体力を計算処理するこ とで得られる.流体力計算には,1/4に縮小したL型(1/4 L型)と1/5に縮小し たS型(1/5 S型)モデルおよび商用CFDソフトウェア(STAR-CCM+)を用いる.縮 小した長頸竜類モデルを用いることで,すでに行われた曳航水槽試験の計測結
果 1,2 ) と比較でき,精度を確認することが可能となる.長頸竜類モデルと縮小し
た長頸竜類モデルの要目はTable 1.1に示している.
長頸竜類が具体的にどのような遊泳形態をとったのかは化石からは明らかに なっていない.そこでFig. 1.6に示すような,四段階からなる遊泳を便宜上考え る.段階をそれぞれ推進段階,移行段階,縦方向滑空段階,旋回滑空段階と呼ぶ ことにする.推進段階とは長頸竜類が鰭を動かして前進速度を得る段階であり,
移行段階とは推進段階を終えた長頸竜類が安定的滑空に至るまでの移行期のこ とである.縦方向滑空段階とは縦方向に限定した安定的滑空を行う段階であり,
旋回滑空段階とは安定的な旋回滑空を行う段階である.本研究では,推進段階に おいて鰭を動かしたときの流体力を商用 CFD ソフトウェアで計算して前進速度 を求め,移行段階・縦方向滑空段階・旋回滑空段階の運動を数値シミュレーショ ンする.
1.3 論文の構成
本論文の構成を以下に示す.第 1 章では研究の背景と目的および手法と論文 の構成を説明する.第 2 章では長頸竜類の滑空遊泳に必要な運動方程式を説明 する.第 3 章では流体力計算と流体力係数の計算過程を説明し,得られた流体 力係数を示す.第 4 章では長頸竜類の滑空遊泳シミュレーションを行った結果 を説明する.第5章では商用 CFDソフトウェアを用いて鰭を動かしたときの流 体力を計算し前進速度を計算する.第 6 章では移行段階のシミュレーションを 説明する.第7章は結言とし,本研究の結論を述べる.
Type L ( 1/4 scale)
Type S ( 1/5 scale)
Full scale Type L
Full scale Type S Length of
Fuselage 2.111 (m) 1.163 (m) 8.442 (m) 5.814 (m)
Max
Breadth 0.860 (m) 0.890 (m) 3.44 (m) 4.45 (m)
Max Diameter
of Fuselage 0.230 (m) 0.230 (m) 0.92 (m) 1.15 (m)
Length of
Neck Part 1.277 (m) 0.329 (m) 5.109 (m) 1.647 (m)
Single Span Length of Front Fin
0.364 (m) 0.345 (m) 1.456 (m) 1.725 (m)
Single Span Length of Rear Fin
0.306 (m) 0.352 (m) 1.224 (m) 1.760 (m)
Chord Length
of Front Fin 0.110 (m) 0.075 (m) 0.440 (m) 0.375 (m)
Chord Length
of Rear Fin 0.098 (m) 0.082 (m) 0.392 (m) 0.410 (m)
Volume of
Body 0.0194 (m3) 0.0153 (m3) 1.242 (m3) 1.913 (m3) Table 1.1Principal Dimension of Plesiosauria models.
付表(Table 1.1)
Fig. 1.2 Stenorhynchosaurus, uncovered skelton, Hampe 4 ) .
付図(Fig. 1.1~Fig. 1.6)
Fig. 1.1 Hydrotherosaurus, holotype. Skelton in position of burial, Wells 3 ) .
Fig. 1.3 Difference of preying behavior of Plesiosauria.
𝑥
𝑥 𝑦 𝑦
𝑧 𝑧
Type L Type S
+ +
Type L
+ +
Type S
Inertial Coordinate System
Moving Coordinate System
Fig. 1.4 Overview of Type L and Type S coordinate systems and definition of fin angles.
Fig. 1.5 Sketch of skelton of Muraenosaurus, Noè et al 5 ) .
a is
Fig. 1.6 Concept of estimated style of swimming Plesiosauria.
第2章 運動方程式
2.1 座標系とオイラー角
長頸竜の運動の記述には,Fig. 1.3に示す、慣性座標系 − と動座標系 −
𝑥𝑦𝑧を用いる9, 22 ).慣性座標系とは空間の任意の位置に固定する直交座標系であ
り,動座標系とは長頸竜とともに回転・移動する座標系であり,その原点は長頸 竜類モデルの前後の鰭軸の中間位置に置く.滑空遊泳シミュレーション(第4章)
開始時には,これらの座標系の位置と方向は一致させる.二つの座標系の関係は オイラー角(𝜙, 𝜃, 𝜓)を用いて(2.1)から(2.4)式で表される.動座標系𝑥,𝑦,𝑧軸の 各方向に沿う速度を , , ,各軸周りの角速度を , , としている.
[ 𝑥 𝑦 𝑧
] = [𝐸] [ ] (2.1)
[𝐸] = [
cos𝜃cos𝜓 cos𝜃sin𝜓 −sin𝜃
sin𝜙sin𝜃cos𝜓 −cos𝜙sin𝜓 sin𝜙sin𝜃sin𝜓 +cos𝜙cos𝜓 sin𝜙cos𝜃 cos𝜙sin𝜃cos𝜓 +cos𝜙sin𝜓 cos𝜙sin𝜃sin𝜓 −sin𝜙cos𝜓 cos𝜙cos𝜃
] (2.2)
[ ̇ ̇ ̇
] = [𝐸]−1[ ] (2.3)
[ 𝜙̇
𝜃̇
𝜓̇
] = [
1 sin𝜙tan𝜃 cos𝜙tan𝜃 0 cos𝜙 −sin𝜙 0 sin𝜙sec𝜃 cos𝜙sec𝜃
] [ ] (2.4)
2.2 運動方程式
長頸竜類に働く重力・浮力・流体力からなる運動方程式は動座標系上で記述さ れる.運動方程式を行列で表すと(2.5)式になる.左辺の𝑀は質量・慣性モーメン ト・付加質量・付加慣性モーメント・重心位置からなる6 × 6の行列であり,右 辺のベクトルは流体力・質量・慣性モーメント・付加質量・付加慣性モーメント・
重力・浮力からなる外力ベクトルである.行列𝑀を(2.6)式に示し,外力ベクトル は(2.7)から(2.12)式にそれぞれ示す.これらの式に含まれている記号はTable 2.1 にまとめている.この運動方程式を数値積分することにより長頸竜類モデルの 位置・姿勢角・速度・角速度からなる時系列情報を得る.
𝑀 × [ ̇ ̇ ̇ ̇ ̇ ̇]𝑇= [𝐹𝑥 𝐹𝑦 𝐹𝑧 𝑀𝑥 𝑀𝑦 𝑀𝑧]𝑇 (2.5)
𝑀 =
[
𝑚 + 𝐴11 0 𝐴13 0 𝑚𝑧𝐺+ 𝐴15 0
0 𝑚 + 𝐴22 0 −𝑚𝑧𝐺+ 𝐴24 0 𝑚𝑥𝐺+ 𝐴26
𝐴31 0 𝑚 + 𝐴33 0 −𝑚𝑥𝐺+ 𝐴35 0
0 −𝑚𝑧𝐺+ 𝐴42 0 𝐼𝑥𝑥+ 𝐴44 0 𝐼𝑥𝑧+ 𝐴46
𝑚𝑧𝐺+ 𝐴51 0 −𝑚𝑥𝐺+ 𝐴53 0 𝐼𝑦𝑦+ 𝐴55 0
0 𝑚𝑥𝐺 + 𝐴62 0 𝐼𝑧𝑥+ 𝐴64 0 𝐼𝑧𝑧+ 𝐴66 ]
(2.6)
𝐹𝑥= −(𝑚 + 𝐴33) + (𝑚 + 𝐴22) − (−𝑚𝑥𝐺+ 𝐴35) 2+ (𝑚𝑥𝐺+ 𝐴26) 2 +(−𝑚𝑧𝐺+ 𝐴24) − 𝐴31 + 𝑢𝑢 2+ 𝑣𝑣 2+ 𝑤𝑤 2+ 𝛿
𝐹𝑅𝛿𝐹𝑅 2𝑅
+ 𝛿
𝐹𝐿𝛿𝐹𝐿 2𝐿+ 𝛿
𝐴𝑅𝛿𝐴𝑅 2𝑅+ 𝛿
𝐴𝐿𝛿𝐴𝐿 2𝐿− (𝑚 − 𝜌∇)g sin 𝜃
(2.7)
𝐹𝑦 = (𝑚 + 𝐴33) − (𝑚𝑥𝐺− 𝐴35) − (𝑚𝑧𝐺+ 𝐴15) − (𝑚 + 𝐴11) +𝐴31 − 𝐴13 + 𝑣 + |𝑣|𝑣| | + 𝑟 + |𝑟|𝑟| |
+(𝑚 − 𝜌𝛻)g sin 𝜙 cos 𝜃
(2.8)
𝐹𝑧= −(𝑚 + 𝐴22) − (−𝑚𝑧𝐺+ 𝐴24) 2+ (𝑚𝑧𝐺+ 𝐴15) 2− (𝑚𝑥𝐺+ 𝐴26) +(𝑚 + 𝐴11) + 𝐴13 + 𝑢𝑢 2+ 𝑤 + |𝑤|𝑤| | + 𝑞 + |𝑞|𝑞| | + 𝛿
𝐹𝑅 𝑅+ 𝛿
𝐹𝐿 𝐿+ 𝛿
𝐴𝑅 𝑅+ 𝛿
𝐴𝐿 𝐿+ (𝑚 − 𝜌𝛻)g cos 𝜙 cos 𝜃
(2.9)
𝑀𝑥= (−𝑚𝑧𝐺+ 𝐴24) − (𝐼𝑥𝑧+ 𝐴64) − ((𝐼𝑧𝑧+ 𝐴66) − (𝐼𝑦𝑦+ 𝐴55))
−(𝐴62− 𝐴53) + (𝐴26+ 𝐴53) − (𝐴33− 𝐴22)
+(𝑚𝑧𝐺+ 𝐴51) − 𝐴31 + 𝐾𝑝 + 𝐾|𝑝|𝑝| | + 𝐾𝛿𝐹𝑅 𝑅+ 𝐾𝛿
𝐹𝐿 𝐿
+𝐾𝛿𝐴𝑅 𝑅+ 𝐾𝛿𝐴𝐿 𝐿− (𝑚𝑧𝐺− 𝜌𝛻𝑧𝐵)g sin 𝜙 cos 𝜃
(2.10)
𝑀𝑦= −(𝑚𝑧𝐺+ 𝐴15) + (−𝑚𝑧𝐺+ 𝐴42) + (𝑚𝑥𝐺+ 𝐴62)
−(𝐼𝑥𝑧+ 𝐴46) 2+ (𝐼𝑥𝑧+ 𝐴64) 2− ((𝐼𝑥𝑥+ 𝐴44) − (𝐼𝑧𝑧+ 𝐴66)) +(−𝑚𝑥𝐺+ 𝐴35) + 𝑀𝑢𝑢 2+ 𝑀𝑤 + 𝑀|𝑤|𝑤| |
+𝑀𝑞 + 𝑀|𝑞|𝑞| | + 𝑀𝛿𝐹𝑅 𝑅+ 𝑀𝛿𝐹𝐿 𝐿+ 𝑀𝛿𝐴𝑅 𝑅+ 𝑀𝛿𝐴𝐿 𝐿
−(𝑚𝑧𝐺− 𝜌𝛻𝑧𝐵)g sin 𝜃
(2.11)
𝑀𝑧= −(−𝑚𝑥𝐺+ 𝐴53) + (𝐼𝑥𝑧+ 𝐴46) − ((𝐼𝑦𝑦+ 𝐴55) − (𝐼𝑥𝑥+ 𝐴44))
−(𝐴51+ 𝐴24) + (𝐴15+ 𝐴42) + 𝐴13 +𝑁𝑣 + 𝑁|𝑣|𝑣| | + 𝑁𝑟 + 𝑁|𝑟|𝑟| | +(𝑚𝑥𝐺− 𝜌𝛻𝑥𝐵)g sin 𝜙 cos 𝜃
(2.12)
付表(Table 2.1)
Table 2.1 Nomenclature.
Symbol Description
𝐴 Added mass and added moment of inertia.
Maximum diameter of main body.
𝐹𝑥, 𝐹𝑦, 𝐹𝑧 Hydrodynamic force on 𝑥−, 𝑦−, 𝑧 −axis.
g Gravity acceleration.
𝐼 Moment of inertia.
𝑀𝑥, 𝑀𝑦, 𝑀𝑧 Hydrodynamic moment on 𝑥−, 𝑦−, 𝑧 −axis.
𝑢𝑢, 𝑣𝑣, 𝑤𝑤
𝑣, 𝑣 𝑣,
𝑢𝑢, 𝑤, 𝑤 𝑤 𝑀𝑢𝑢, 𝑀𝑤, 𝑀𝑤 𝑤
𝑁𝑣, 𝑁𝑣 𝑣
Hydrodynamic coefficients with respect to velocity. , , means force on 𝑥 −, 𝑦 −, 𝑧 −axis, respectively.
𝐾𝑝 𝑝, 𝐾𝑝, 𝑀𝑞, 𝑀𝑞 𝑞 𝑁𝑟, 𝑁𝑟 𝑟
Hydrodynamic coefficients with respect to angular velocity.
𝐾, 𝑀, 𝑁means moment on 𝑥−, 𝑦−, 𝑧 −axis, respectively.
𝛿𝐹𝑅𝛿𝐹𝑅, 𝛿𝐹𝐿𝛿𝐹𝐿,
𝛿𝐴𝑅𝛿𝐴𝑅, 𝛿
𝐴𝐿𝛿𝐴,
𝛿𝐹𝑅 , 𝛿𝐹𝐿, 𝛿𝐴𝑅 , 𝛿𝐴𝐿 𝐾𝛿
𝐹𝑅, 𝐾𝛿
𝐹𝐿, 𝐾𝛿𝐴𝑅, 𝐾𝛿𝐴𝐿, 𝑀𝛿𝐹𝑅, 𝑀𝛿𝐹𝐿, 𝑀𝛿𝐴𝑅, 𝑀𝛿𝐴𝐿
Hydrodynamic coefficients with respect to fin angle.
𝑚 Mass.
( , 𝑥, 𝑦, 𝑧) Moving coordinate system.
( , , , ) Inertial coordinate system.
, , Angular velocity on moving coordinate system (See Fig.
1.4).
, , Velocity on moving coordinate system (See Fig. 1.4).
𝑅, 𝐿 Front fin angle. Where suffix R means right and suffix L means left (See Fig. 1.4).
𝑅, 𝐿 Rear fin angle. Where suffix R means right and suffix L means left (See Fig. 1.4).
𝜙, 𝜃, 𝜓 Eulerian angle.
(𝑥𝐵, 0, 𝑧𝐵) Position of center of buoyancy.
(𝑥𝐺, 0, 𝑧𝐺) Position of center of gravity.
𝜌 Water density.
𝛻 Volume.
第 3 章 流体力計算
第 2 章で説明した運動方程式には,長頸竜類の形状によって異なる値を取る 流体力係数が含まれているが,これらの値を得る方法として以下の三つが挙げ られる.
1. 推定式から得る方法.
2. 曳航水槽で流体力を計測し,得られた流体力を計算処理する方法.
3. CFDによって得られた流体力を計算処理する方法.
1. の方法は,(翼に関する精度のよい流体力係数の簡易的な推定は可能なので
9),)翼(鰭)の流体力が支配的な航空機の様な形状の場合は問題が無い.しか し,胴体の影響が大きいと考えられる長頸竜類モデルに適用した場合,胴体の正 確な流体力を簡易に推定することが難しい 23).2.の方法は長頸竜類モデルを 使用した流体力計測には多大な労力が必要と考えられるため本研究では行わな い.以上を踏まえて,本研究では 3.に示した CFD を用いる方法で流体力を計 算する.本研究では,商用CFDソフトウェア(STAR-CCM+ 8.06.007)を流体力計 算に用い,得られた流体力を計算処理することで,流体力係数を得る.
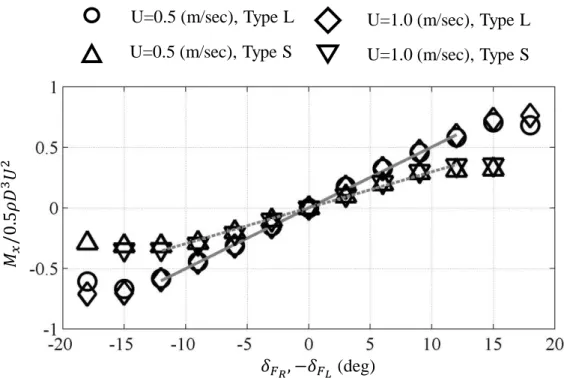
流体力係数は静的流体力係数と動的流体力係数に分類できる.静的流体力係 数は,長頸竜類モデルに迎角・斜航角・鰭角を設定したときの定常状態を計算す る静的計算によって得られる.迎角は長頸竜類モデルの頭部を上げる時を正と し,斜航角は頭部を右に振るときを正としている.鰭角とは鰭軸を中心とした回 転角であり,Fig 1.3に示したように,後縁上げを正としている.動的流体力係数 は,強制動揺を与えた状態の非定常状態を計算する動的計算によって得られる.
これらの計算を行い,得られた流体力を計算処理することで,第 4 章で述べ る運動シミュレーションに必要な流体力係数を得る.
第 3 章では,最初に静的計算と動的計算の概略とそれぞれの計算処理の方法 について説明する.次に,流体力計算で必要な一様流れの流速の推定について説 明し,最後に静的流体力計算と動的流体力計算の結果を示して流体力係数の値 をまとめる.
3.1 静的計算の概略と計算処理
3.1.1 𝑥軸並進抵抗計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈(= )の一様流れを 設定し,長頸竜類モデルの迎角・斜航角・鰭角を0に設定する.長頸竜類モデル の形状は上下非対象(鰭の位置が胴体中心軸から下方)なので迎角が 0 の場合 も𝑦軸周りにモーメント𝑀𝑦が働く.よって,流体力・流体力モーメント𝐹𝑥,𝐹𝑧, 𝑀𝑦を計算する.この計算を𝑥軸並進抵抗計算と呼ぶ.得られた流体力・流体力モ ーメントは,静的流体力係数 𝑢𝑢, 𝑢𝑢,𝑀𝑢𝑢を用いて(3.1)から(3.3)式で表され る.
𝐹𝑥 = 𝑢𝑢 2 (3.1)
𝐹𝑧 = 𝑢𝑢 2 (3.2)
𝑀𝑦 = 𝑀𝑢𝑢 2 (3.3)
これらの式を密度𝜌,代表長さ ,代表速度𝑈を用いて(3.4)から(3.6)式のよう に無次元化することで,無次元化された静的流体力係数 ′𝑢𝑢, ′𝑢𝑢,𝑀′𝑢𝑢が計算
できる24, 25 ).ただし,[ ⋅ ]′(ダッシュ)は無次元化を表している.無次元化につ
いては以下同様とする.
𝐹′𝑥 = 𝐹𝑥
0.5𝜌 2𝑈2 ≡ ′𝑢𝑢 (3.4)
𝐹′𝑧 = 𝐹𝑧
0.5𝜌 2𝑈2 ≡ ′𝑢𝑢 (3.5)
𝑀′𝑦 = 𝑀𝑦
0.5𝜌 3𝑈2 ≡ 𝑀′𝑢𝑢 (3.6)
3.1.2 𝑧軸並進抵抗計算
計算領域に長頸竜類モデルの下方から上方に流れる速度𝑈(= )の一様流れを 設定する,長頸竜類モデルは計算領域内に水平に置かれ,ヒレ角は0である.長 頸竜類モデルの形状は前後非対象なのでx軸方向の力𝐹𝑥や𝑦軸周りのモーメント 𝑀𝑦が働く.よって,流体力・流体力モーメント𝐹𝑥,𝐹𝑧,𝑀𝑦を計算する.この計 算を𝑧軸並進抵抗計算と呼ぶ.得られた流体力・流体力モーメントは,静的流体 力係数 𝑤𝑤, |𝑤|𝑤,𝑀|𝑤|𝑤を用いて(3.7)から(3.9)式のように表される.
𝐹𝑥 = 𝑤𝑤 2 (3.7)
𝐹𝑧 = |𝑤|𝑤| | (3.8)
𝑀𝑦 = 𝑀|𝑤|𝑤| | (3.9) これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.10)から(3.12)式 のように無次元化することで,無次元化された静的流体力係数 𝑤𝑤′ ,|𝑤|𝑤′ ,𝑀|𝑤|𝑤′ が計算できる.
𝐹′𝑥 = 𝐹𝑥
0.5𝜌 2𝑈2 ≡ ′𝑤𝑤 (3.10)
𝐹′𝑧= 𝐹𝑧
0.5𝜌 2𝑈2 ≡ ′|𝑤|𝑤 (3.11)
𝑀′𝑦 = 𝑀𝑦
0.5𝜌 3𝑈2 = 𝑀′|𝑤|𝑤 (3.12)
3.1.3 迎角変更計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈(= √ 2+ 2 ≒ ) の一様流れを設定する.また,迎角を𝛼に,斜航角と鰭角は0に設定する.長頸 竜類モデルの形状は左右対象なので𝑦軸方向の力は働かない.よって,流体力𝐹𝑥, 𝐹𝑧と流体力モーメント𝑀𝑦を計算すればよい.この計算を迎角変更計算と呼ぶ.
得られた流体力・流体力モーメントは静的流体力係数 𝑢𝑢,𝑢𝑢,𝑀𝑢𝑢, 𝑤𝑤,𝑤, 𝑀𝑤を用いて(3.13)から(3.15)のように表される.
𝐹𝑥 = 𝑢𝑢 2+ 𝑤𝑤 2 (3.13)
𝐹𝑧 = 𝑢𝑢 2+ 𝑤 (3.14)
𝑀𝑦 = 𝑀𝑢𝑢 2+ 𝑀𝑤 (3.15)
迎角𝛼は速度 と速度𝑈を用いて表される.𝛼が十分に小さいときは(3.16)式の ように近似でき,
𝛼 ≒sin𝛼 (3.16)
sin𝛼は速度𝑈と によって(3.17)式のように表せるので,
sin𝛼 =
𝑈 (3.17)
(3.16)と(3.17)式から迎角𝛼 は(3.18)式となる.
𝛼 ≒𝑈 (3.18)
(3.13)から(3.15)式を密度𝜌,代表長さ ,代表速度𝑈を用いて(3.19)式から (3.21)のように無次元化することで,無次元化された静的流体力係数 𝑤𝑤′ , 𝑤′ , 𝑀𝑤′が計算できる.
𝐹′𝑥 = 𝐹𝑥
0.5𝜌 2𝑈2 ≡ ′𝑢𝑢( 𝑈)
2
+ ′𝑤𝑤( 𝑈)
2
≒ ′𝑢𝑢+ ′𝑤𝑤𝛼2 (3.19) 𝐹′𝑧 = 𝐹𝑧
0.5𝜌 2𝑈2 = ′𝑢𝑢( 𝑈)
2
+ ′𝑤(
𝑈) ≒ ′𝑢𝑢+ ′𝑤𝛼 (3.20) 𝑀′𝑦 = 𝑀𝑦
0.5𝜌 3𝑈2 = 𝑀′𝑢𝑢( 𝑈)
2
+ 𝑀′𝑤(
𝑈) ≒ 𝑀′𝑢𝑢+ 𝑀′𝑤𝛼 (3.21) 無次元化された静的流体力係数 𝑤𝑤′ , 𝑤′,𝑀𝑤′を計算するには最小二乗法を用 いる.𝑤𝑤′ は𝛼に関する2次関数にフィットし𝛼2の係数を計算して求め,𝑤′と𝑀𝑤′ は𝛼に関する1次関数にフィットし𝛼の係数を計算して求める.
3.1.4 左右同位相鰭角変更計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈(= )の一様流れを 設定し,長頸竜類の迎角・斜航角を0に設定する.この時,前鰭か後鰭のいずれ かに左右同じ鰭角を設定し,流体力𝐹𝑥,𝐹𝑧と流体力モーメント𝑀𝑦を計算する.こ の計算を左右同位相鰭角変更計算と呼ぶ.前鰭に鰭角 𝑅, 𝐿を設定したとき静 的流体力係数 𝛿
𝐹𝑅𝛿𝐹𝑅, 𝛿
𝐹𝐿𝛿𝐹𝐿, 𝛿
𝐹𝑅, 𝛿
𝐹𝐿,𝑀𝛿
𝐹𝑅,𝑀𝛿
𝐹𝐿が計算できる.後鰭に 鰭角 𝑅,
𝐿を設定したとき静的流体力係数 𝛿
𝐴𝑅𝛿𝐴𝑅,𝛿
𝐴𝐿𝛿𝐴𝐿,𝛿
𝐴𝑅,𝛿
𝐴𝐿,𝑀𝛿
𝐴𝑅, 𝑀𝛿
𝐴𝐿が計算できる.前鰭に鰭角を設定したとき,(3.22)から(3.24)式のように流 体力・流体力モーメントは表せる.
𝐹𝑥 = 𝑢𝑢 2+ 𝛿
𝐹𝑅𝛿𝐹𝑅 2𝑅+ 𝛿
𝐹𝐿𝛿𝐹𝐿 2𝐿
(3.22) 𝐹𝑧 = 𝑢𝑢 2+ 𝛿
𝐹𝑅 𝑅+ 𝛿
𝐹𝐿 𝐿 (3.23)
𝑀𝑧= 𝑀𝑢𝑢 2+ 𝑀𝛿
𝐹𝑅 𝑅+ 𝑀𝛿
𝐹𝐿 𝐿 (3.24)
これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.25)から(3.27)し きのように無次元化する.
𝐹′𝑥 = 𝐹𝑥
0.5𝜌 2𝑈2 ≡ 𝑢𝑢′ + 𝛿
𝐹𝑅𝛿𝐹𝑅
′
𝑅 2 + 𝛿
𝐹𝐿𝛿𝐹𝐿
′
𝐿
2 (3.25)
𝐹′𝑧 = 𝐹𝑧
0.5𝜌 2𝑈2 ≡ 𝑢𝑢′ + 𝛿
𝐹𝑅
′
𝑅+ 𝛿
𝐹𝐿
′
𝐿 (3.26)
𝑀′𝑦 = 𝑀𝑦
0.5𝜌 3𝑈2 ≡ 𝑀𝑢𝑢′ + 𝑀𝛿
𝐹𝑅
′
𝑅+ 𝑀𝛿
𝐹𝐿
′
𝐿 (3.27)
前鰭の静的流体力係数を計算するため最小二乗法を用いる.左右の鰭は同じ 翼断面を採用しているので,(3.25)式については鰭角
𝑅,
𝐿に関する2次関数
にフィットし,2次の係数を する. と 式についても同様に鰭角
𝑅,
𝐿に関する1次関数にフィットし,1次の係数を1/2する.
後鰭に鰭角を設定したとき,(3.28)から(3.30)式のように流体力・流体力モー メントは表せる.
𝐹𝑥 = 𝑢𝑢 2+ 𝛿
𝐴𝑅𝛿𝐴𝑅 𝑅 2 + 𝛿
𝐴𝐿𝛿𝐴𝐿 2𝐴𝐿
(3.28) 𝐹𝑧 = 𝑢𝑢 2+ 𝛿
𝐴𝑅 𝑅+ 𝛿
𝐴𝐿 𝐿 (3.29)
𝑀𝑧 = 𝑀𝑢𝑢 2+ 𝑀𝛿
𝐴𝑅 𝑅+ 𝑀𝛿
𝐴𝐿 𝐿 (3.30)
これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.31)式から(3.33) 式のように無次元化する.
𝐹′𝑥= 𝐹𝑥
0.5𝜌 2𝑈2 ≡ 𝑢𝑢′ + 𝛿
𝐴𝑅𝛿𝐴𝑅
′
𝑅 2 + 𝛿
𝐴𝑅𝛿𝐴𝐿
′
𝐿
2 (3.31)
𝐹′𝑧 = 𝐹𝑧
0.5𝜌 2𝑈2 ≡ 𝑢𝑢′ + 𝛿
𝐴𝑅
′
𝑅+ 𝛿
𝐴𝐿
′
𝐿 (3.32)
𝑀′𝑦 = 𝑀𝑦
0.5𝜌 3𝑈2 ≡ 𝑀𝑢𝑢′ + 𝑀𝛿
𝐴𝑅
′
𝑅+ 𝑀𝛿
𝐴𝐿
′
𝐿 (3.33)
後鰭の静的流体力係数を計算するには,最小二乗法を用いる.左右の鰭は同じ 翼断面を採用しているので,(3.31)式については鰭角
𝑅,
𝐿に関する最小二乗 法で2次関数にフィットし, 2次の係数を1/2して後鰭の静的流体力係数とす る.(3.32)と(3.33)式についても同様に鰭角
𝑅,
𝐿に関する最小二乗法で 1 次 関数にフィットし,1次の係数を1/2して後鰭の静的流体力係数とする.
3.1.5 𝑦軸並進抵抗計算
計算領域に長頸竜類モデルの右側から左側に流れる速度𝑈(= )の一様流れを 設定する.長頸竜類モデルは計算領域内に水平に置かれ,ヒレ角は0である.長 頸竜類モデルの形状は前後非対象なので x 軸方向の力と z 軸まわりのモーメン トが働く.よって,流体力𝐹𝑥,𝐹𝑦と流体力モーメント𝑀𝑧を計算する.この計算を 𝑦軸並進抵抗計算と呼ぶ.得られた流体力・流体力モーメントは,静的流体力係 数 𝑣𝑣, |𝑣|𝑣,𝑁|𝑣|𝑣を用いて(3.34)から(3.36)式のように表される.
𝐹𝑥 = 𝑣𝑣 2 (3.34)
𝐹𝑦 = |𝑣|𝑣| | (3.35)
𝑀𝑧 = 𝑁|𝑣|𝑣| | (3.36)
これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.37)から(3.39)式 のように無次元化することで,無次元化された静的流体力係数 𝑣𝑣′ , |𝑣|𝑣′ ,𝑁|𝑣|𝑣′
が計算できる.
𝐹′𝑥 = 𝐹𝑥
0.5𝜌 2𝑈2 ≡ ′𝑣𝑣 (3.37)
𝐹′𝑦 = 𝐹𝑦
0.5𝜌 2𝑈2 ≡ ′|𝑣|𝑣 (3.38)
𝑀′𝑧= 𝑀𝑧
0.5𝜌 3𝑈2 ≡ 𝑁′|𝑣|𝑣′ (3.39)
3.1.6 斜航角変更計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈(= √ 2+ 2 ≒ ) の一様流れを設定する.長頸竜類モデルの斜航角を𝛽に,迎角・鰭角を0に設定 する.ここでは,流体力𝐹𝑥,𝐹𝑦と流体力モーメント𝑀𝑧を計算する.この計算を斜 航角変更計算と呼ぶ.得られた流体力・流体力モーメントは,静的流体力係数
𝑢𝑢, 𝑣𝑣, 𝑣,𝑁𝑣を用いて(3.40)から(3.42)のように表される.
𝐹𝑥= 𝑢𝑢 2+ 𝑣𝑣 2 (3.40)
𝐹𝑦 = 𝑣 (3.41)
𝑀𝑧 = 𝑁𝑣 (3.42)
斜航角𝛽は速度 と速度𝑈を用いて表される.𝛽が十分に小さいとは(3.43)式の ように近似でき,
𝛽 ≒sin𝛽 (3.43)
sin𝛽は𝑈と によって(3.44)式のように表せるので,
sin𝛽 =−
𝑈 (3.44)
(3.43)式と(3.44)式から斜航角𝛽は(3.45)式となる.
𝛽 ≒−
𝑈 (3.45)
(3.40)から(3.42)式を密度𝜌,代表長さ ,代表速度𝑈を用いて(3.46)式から (3.48)のように無次元化することで,無次元化された静的流体力係数 𝑣𝑣′ ,𝑣′,𝑁𝑣′ が計算できる.
𝐹′𝑥= 𝐹𝑥
0.5𝜌 2𝑈2 ≡ ′𝑢𝑢( 𝑈)
2
+ ′𝑣𝑣( 𝑈)
2
≒ ′𝑢𝑢+ ′𝑣𝑣𝛽2 (3.46) 𝐹′𝑦 = 𝐹𝑦
2 2 ≡ − ′𝑣(−
) ≒ − ′𝑣𝛽 (3.47)
𝑀′𝑧 = 𝑀𝑧
0.5𝜌 3𝑈2 ≡ −𝑁′𝑣(−
𝑈 ) ≒ −𝑁′𝑣𝛽 (3.48)
無次元化された流体力係数 𝑣𝑣′ , 𝑣′,𝑁𝑣′を計算するには最小二乗法を用いる.
𝑣𝑣′ は𝛽に関する 2次関数にフィットし𝛽2の 2次の係数を計算して求める. 𝑣′と 𝑁𝑣′は𝛽に関する1次関数にフィットし𝛽の1次の係数を計算して求める.
3.1.7 左右反位相鰭角変更計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈(= )の一様流れを 設定し,長頸竜類モデルの迎角と斜航角は0に設定する.この時,前鰭か後鰭の いずれかに左右で反位相になるように鰭角を設定(具体的には
𝑅 = − 𝐿,
𝑅 =
− 𝐿となるように設定)し,流体力モーメント𝑀𝑥を計算する.この計算を左右 反位相鰭角変更計算と呼ぶ.前鰭に鰭角
𝑅,
𝐿を設定したとき,静的流体力係 数𝐾𝛿
𝐹𝑅,𝐾𝛿
𝐹𝐿を計算でき,後鰭に鰭角
𝑅,
𝐿を設定したとき,流体力係数𝐾𝛿
𝐴𝑅, 𝐾𝛿
𝐴𝐿を計算できる.前鰭に鰭角を設定したときの流体力モーメントは流体力係数 𝐾𝛿
𝐹𝑅,𝐾𝛿
𝐹𝐿 を用いて(3.49)式で表される.
𝑀𝑥 = 𝐾𝛿
𝐹𝑅 𝑅+ 𝐾𝛿
𝐹𝐿 𝐿 (3.49)
これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.50)式のように 無次元化することで,無次元化された静的流体力係数𝐾𝛿
𝐹𝑅
′ ,𝐾𝛿
𝐹𝐿
′ が計算できる.
𝑀′𝑥 = 𝑀𝑥
0.5𝜌 3𝑈2 ≡ 𝐾𝛿
𝐹𝑅
′
𝑅+ 𝐾𝛿
𝐹𝐿
′
𝐿 (3.50)
前鰭の流体力係数を計算するには最小二乗法を用いる.左右の鰭は同じ翼断 面を採用しているので,(3.50)式については鰭角
𝑅,
𝐿に関する1次関数にフ ィットし,得られた1次の係数を1/2する.
前鰭に鰭角を設定したときの流体力モーメントは流体力係数𝐾𝛿
𝐴𝑅,𝐾𝛿
𝐴𝐿 を用
いて(3.51)式で表される.
𝑀𝑥 = 𝐾𝛿
𝐴𝑅 𝑅+ 𝐾𝛿
𝐴𝐿 𝐿 (3.51)
これらの式を密度𝜌,代表長さ ,代表速度𝑈(= )を用いて(3.50)式のように 無次元化することで,無次元化された静的流体力係数𝐾𝛿
𝐴𝑅
′ ,𝐾𝛿
𝐴𝐿
′ が計算できる.
𝑀′𝑥 = 𝑀𝑥
0.5𝜌 3𝑈2 ≡ 𝐾𝛿
𝐴𝑅
′
𝑅+ 𝐾𝛿
𝐴𝐿
′
𝐿 (3.52)
前鰭の流体力係数を計算するには最小二乗法を用いる.左右の鰭は同じ翼断 面を採用しているので,(3.52)式については鰭角 𝑅, 𝐿に関する1次関数にフ
ィットし, 1次の係数を1/2する.
3.2 動的計算の概略と計算処理
3.2.1 フーリエ級数展開
長頸竜類モデルに正弦波状の周期的動揺(円周波数:𝜔)を与えて非定常状態 を計算すると,長頸竜類モデルに働く流体力 , , ・流体力モーメント𝐾, 𝑀, 𝑁はフーリエ級数展開 26, 27) で表すことができ,0 次成分と基本周波数成分を取 り出すと次式となる. 0, 0, 0, 𝐾0, 𝑀0, 𝑁0はそれぞれの 0 次成分, cos 𝜀𝑋 cos 𝜀𝑌, cos 𝜀𝑍, 𝐾 cos 𝜀𝐾, 𝑀 cos 𝜀𝑀, 𝑁 cos 𝜀𝑁はコサイン成分, sin 𝜀𝑋 sin 𝜀𝑌, sin 𝜀𝑍, 𝐾 sin 𝜀𝐾, 𝑀 sin 𝜀𝑀, 𝑁 sin 𝜀𝑁はサイン成分であり,𝑡は時間を示している.
= 0+ cos𝜀𝑋cos𝜔𝑡 + sin𝜀𝑋sin𝜔𝑡 (3.53)
= 0+ cos𝜀𝑌cos𝜔𝑡 + sin𝜀𝑌sin𝜔𝑡 (3.54)
= 0+ cos𝜀𝑍cos𝜔𝑡 + sin𝜀𝑍sin𝜔𝑡 (3.55) 𝐾= 𝐾0+ 𝐾cos𝜀𝐾cos𝜔𝑡 + 𝐾sin𝜀𝐾sin𝜔𝑡 (3.56) 𝑀= 𝑀0+ 𝑀cos𝜀𝑀cos𝜔𝑡 + 𝑀sin𝜀𝑀sin𝜔𝑡 (3.57) 𝑁= 𝑁0+ 𝑁cos𝜀𝑁cos𝜔𝑡 + 𝑁sin𝜀𝑁sin𝜔𝑡 (3.58) CFD ソフトウェアによって計算された流体力・流体力モーメントを上記のよ うにフーリエ級数展開し,得られたフーリエ級数を計算処理することで,必要な 流体力係数を得る.
3.2.2 強制サージ計算
計算領域に長頸竜類モデルの前方から後方に流れる速度𝑈の一様流れを設定 し,長頸竜類モデルの迎角・斜航角・鰭角を0に設定する.この時,長頸竜類モ デルに(3.59)式で表される振幅 𝑎の強制動揺を与え,流体力 , と流体力モーメ ント𝑀を計算する.これを強制サージ計算と呼ぶ.
𝑥 = 𝑎sin𝜔𝑡 (3.59)
速度𝑈の一様流れを考慮すると,長頸竜類モデルと一様流れの相対速度は (3.60)式のように表され,両辺微分することで,(3.61)式となる.
𝑥̇ = = 𝑈 + 𝑎𝜔cos𝜔𝑡 (3.60)
𝑥̈ = ̇ = − 𝑎𝜔2sin𝜔𝑡 (3.61) 運動方程式からサージに関する部分を取り出し,両式を代入することにより,
強制サージによって長頸竜類モデルに働く流体力や流体力モーメント X, Z, M が計算できる.
= 𝑢𝑢|𝑈 + 𝑎𝜔cos𝜔𝑡|(𝑈 + 𝑎𝜔cos𝜔𝑡) + 𝐴11 𝑎𝜔2sin𝜔𝑡 (3.62) = 𝑢𝑢|𝑈 + 𝑎𝜔cos𝜔𝑡|(𝑈 + 𝑎𝜔cos𝜔𝑡) + 𝐴31 𝑎𝜔2sin𝜔𝑡 (3.63) 𝑀 = 𝑀𝑢𝑢|𝑈 + 𝑎𝜔cos𝜔𝑡|(𝑈 + 𝑎𝜔cos𝜔𝑡) + 𝐴51 𝑎𝜔2sin𝜔𝑡 (3.64)
|𝑈 + 𝑎𝜔cos𝜔𝑡|(𝑈 + 𝑎𝜔cos𝜔𝑡)は𝑈/ 𝑎𝜔 ≫ 1 (前進速度が動揺速度に比べて 格段に大きい)とすると(3.65)式のように近似できる.
|𝑈 + 𝑎𝜔cos𝜔𝑡|(𝑈 + 𝑎𝜔cos𝜔𝑡) = 𝑎2𝜔2| 𝑈
𝑎𝜔+cos𝜔𝑡| ( 𝑈
𝑎𝜔+cos𝜔𝑡)
(3.65)
= 𝑎2𝜔2(( 𝑈
𝑎𝜔)
2
+1 2+ 2𝑈
𝑎𝜔cos𝜔𝑡) + ⋯ ⋯
≒𝑈2+1 2 𝑎
2𝜔2+ 2𝑈 𝑎𝜔cos𝜔𝑡
この式を(3.62)式から(3.64)式に代入し,(3.66)から(3.68)式を得る.
= 𝑢𝑢(𝑈2+1 2 𝑎
2𝜔2+ 2𝑈 𝑎𝜔cos𝜔𝑡) + 𝐴11 𝑎𝜔2sin𝜔𝑡
= (𝑈2+1 2 𝑎
2𝜔2) 𝑢𝑢+ (2𝑈 𝑎𝜔) 𝑢𝑢∗ cos𝜔𝑡 + 𝐴11 𝑎𝜔2sin𝜔𝑡 (3.66) = 𝑢𝑢(𝑈2+1
2 𝑎
2𝜔2+ 2𝑈 𝑎𝜔cos𝜔𝑡) + 𝐴31 𝑎𝜔2sin𝜔𝑡
= (𝑈2+1 2 𝑎
2𝜔2) 𝑢𝑢+ (2𝑈 𝑎𝜔) 𝑢𝑢∗ cos𝜔𝑡 + 𝐴31 𝑎𝜔2sin𝜔𝑡 (3.67) 𝑀 = 𝑀𝑢𝑢(𝑈2+1
2 𝑎
2𝜔2 + 2𝑈 𝑎𝜔cos𝜔𝑡) + 𝐴51 𝑎𝜔2sin𝜔𝑡
= (𝑈2+1 2 𝑎
2𝜔2) 𝑀𝑢𝑢+ (2𝑈 𝑎𝜔)𝑀𝑢𝑢∗ cos𝜔𝑡 + 𝐴51 𝑎𝜔2sin𝜔𝑡 (3.68)
𝑢𝑢∗ , 𝑢𝑢∗ ,𝑀𝑢𝑢∗ の上添え文字アスタリスク([ ⋅ ]∗)はそれぞれ 𝑢𝑢, 𝑢𝑢,𝑀𝑢𝑢 の振動成分を示している.これらの式を(3.53),(3.55),(3.57)式と比較する.
0 = (𝑈2+1 2 𝑎
2𝜔2) 𝑢𝑢 (3.69)
cos𝜀𝑋 = (2𝑈 𝑎𝜔) 𝑢𝑢∗ (3.70)
sin𝜀𝑋 = 𝐴11 𝑎𝜔2 (3.71)