多目的遺伝的アルゴリズムによるシステム信頼性 の最適化設計に関する研究
Study on Optimal Design for System Reliability by Multiobjective Genetic Algorithms
2005 年 6 月
早稲田大学大学院情報生産システム研究科
情報生産システム工学専攻 ソフトコンピューティング研究
椋 田 實
- 目 次 -
第1章 序論 ... 1
第2章 システム信頼性最適化設計 ... 5
2.1 まえがき ... 5
2.2 システムの信頼性 ... 5
2.2.1 信頼度と故障率 ... 5
2.2.2 システムの不稼働率 ... 6
2.2.3 システム信頼性の向上 ... 7
2.3 冗長化構成によるシステム信頼性向上 ... 8
2.3.1 システム信頼度の計算方法 ... 8
2.3.2 システム不稼働率の計算方法 ... 9
2.4 信頼性最適化設計モデル ... 10
2.5 通信システムの信頼性最適化設計モデル ... 12
2.5.1 FTA(故障の木解析:Fault Tree Analysis) ... 12
2.5.2 最小カットセットによるモデリング手法 ... 13
2.5.3 システムの不稼働率モデルの構築例 ... 17
第3章 多目的遺伝的アルゴリズム ... 20
3.1 まえがき ... 20
3.2 遺伝的アルゴリズムの基礎 ... 20
3.3 非線形最適化問題への適用 ... 21
3.4 多目的遺伝的アルゴリズム ... 22
3.4.1 多目的 GA の構造 ... 23
3.4.2 遺伝子表現 ... 25
3.4.3 シェアリング ... 26
3.4.4 重み係数法による評価関数 ... 26
3.4.5 ランキングとランク度 ... 28
3.4.6 遺伝的操作(交叉と突然変異) ... 28
3.4.7 適応型スキームによる局所探索技法 ... 28
3.4.8 パレート解候補の更新 ... 30
3.4.9 遺伝的操作(選択) ... 31
3.4.10 集団数とパレート解の改善 ... 32
3.5 パレート解の評価方法 ... 32
3.5.1 弓形面積(arched area) ... 32
3.5.2 被覆率(cover rate) ... 33
3.5.3 パレート解の数 ... 34
3.5.4 MDI 法により選択した解の精度 ... 34
3.5.5 正規化したパレート解の図示 ... 34
第4章 適応型局所探索 GA による信頼性最適化設計 ... 36
4.1 まえがき ... 36
4.2 信頼性最適化問題 ... 37
4.3 適応型局所探索 GA ... 37
4.3.1 基本的な GA ... 38
4.3.2 適応型スキームを持たない局所探索による GA ... 38
4.3.3 適応型スキームを持った局所探索による GA ... 38
4.4 適応型局所探索 GA の構造 ... 39
4.4.1 基本的な GA(CGA) ... 39
4.4.2 na-GLS ... 40
4.4.3 a-GLS ... 41
4.5 数値実験 ... 42
4.5.1 テスト問題のその1(Test-1) ... 42
4.5.2 テスト問題のその2(Test-2) ... 44
4.5.3 実験結果の考察 ... 46
4.6 むすび ... 48
第5章 適応型ハイブリッド GA による信頼性最適化設計 ... 49
5.1 まえがき ... 49
5.2 信頼性最適化問題 ... 50
5.3 適応型ハイブリッド GA ... 50
5.3.1 遺伝的アルゴリズム ... 50
5.3.2 局所探索技術 ... 51
5.3.3 3種類の適応型ハイブリッド GA ... 51
5.4 適応型ハイブリッド GA の構成 ... 53
5.4.1 適応型ハイブリッド GA ... 53
5.5 数値実験 ... 54
5.6 むすび ... 57
第6章 多目的 GA による多目的システムの信頼性最適化設計 ... 58
6.1 まえがき ... 58
6.2 信頼性最適化モデル ... 59
6.3 ハイブリッド化戦略 ... 60
6.3.1 GA の実装 ... 61
6.3.2 局所探索 (LS) 技法 ... 64
6.3.3 ファジィ論理制御 (FLC) ... 66
6.4 数値実験 ... 68
6.5 むすび ... 73
第7章 多目的 GA による通信システムの信頼性最適化設計 ... 74
7.1 まえがき ... 74
7.2 光ファイバ通信ネットワークシステム ... 74
7.2.1 光ファイバ通信ネットワークシステムモデル ... 76
7.2.2 不稼働率と総コストの最適化モデル ... 77
7.2.3 記号の説明 ... 80
7.3 多目的遺伝的アルゴリズム ... 82
7.3.1 染色体の表現 ... 83
7.3.2 交叉 ... 84
7.3.3 突然変異 ... 84
7.3.4 改良パレート解保存戦略 ... 84
7.3.5 適応型スキームによる局所探索 ... 86
7.4 数値実験 ... 86
7.4.1 3種類のテスト用モデル ... 87
7.4.2 光ファイバ通信システムの共通の設計値 ... 92
7.4.3 数値実験 ... 93
7.4.4 実験結果の考察 ... 97
7.5 むすび ... 100
第8章 結言 ... 101
参考文献 ...104
謝 辞 ...110
- 図 目 次 -
図 1-1 章の相互関連図 ... 4
図 2-1 確率密度関数と信頼度 ... 6
図 2-2 サブシステムの直列接続 ... 9
図 2-3 サブシステムの並列接続 ... 9
図 2-4 サブシステムの直・並列接続 ... 9
図 2-5 直・並列接続の通信システムのブロック図 ... 14
図 2-6 サブシステムの予備回線(待機冗長機構) ... 14
図 2-7 システムの Fault Tree 図 ... 15
図 2-8 ネットワーク接続の通信システム ... 17
図 2-9 通信システムの Fault Tree 図 ... 17
図 3-1 提案の多目的 GA の構造 ... 24
図 3-2 親個体から次世代の親個体への生成の流れ ... 24
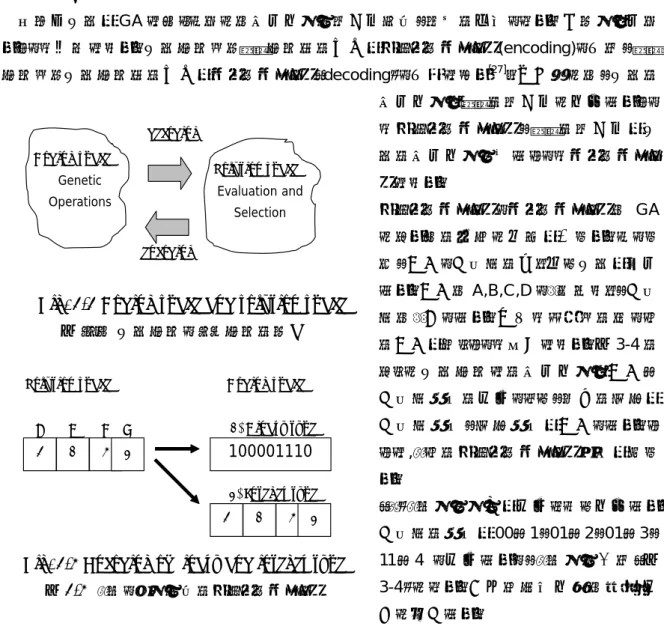
図 3-3 問題空間と GA 空間の関係 ... 25
図 3-4 2進と整数表現のエンコーディング ... 25
図 3-5 シェアリング度の計算 ... 26
図 3-6 ランク度の計算 ... 28
図 3-7 LS による近傍解の生成 ... 29
図 3-8 新個体による解候補群の更新 ... 30
図 3-9 弓形領域の面積 ... 33
図 3-10 被覆率の計算 ... 33
図 3-11 パレート解の正規化表示 ... 35
図 3-12 Model-3 のパレート解 ... 35
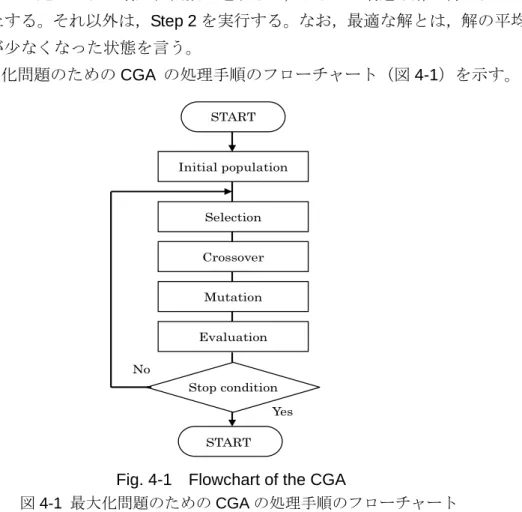
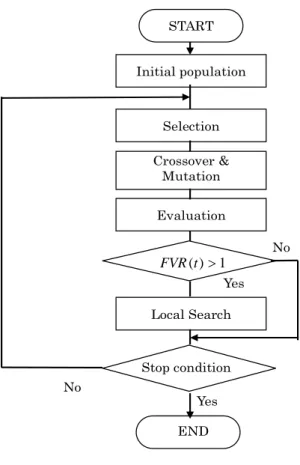
図 4-1 最大化問題のための CGA の処理手順のフローチャート ... 40
図 4-2 最大化問題のための na-GLS の処理手順のフローチャート ... 41
図 4-3 最大化問題のための a-GLS の処理手順のフローチャート ... 42
図 4-4 直列接続のシステム Test-1 ... 43
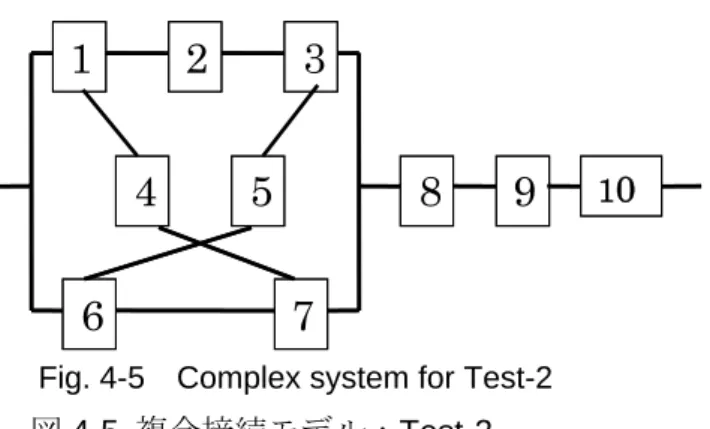
図 4-5 複合接続のシステム Test-2 ... 44
図 4-6 Test-1 と Test-2 において局所探索が働いた回数の比較 ... 48
図 5-1 Test-1 における a-hGAs の平均適合度の推移 ... 57
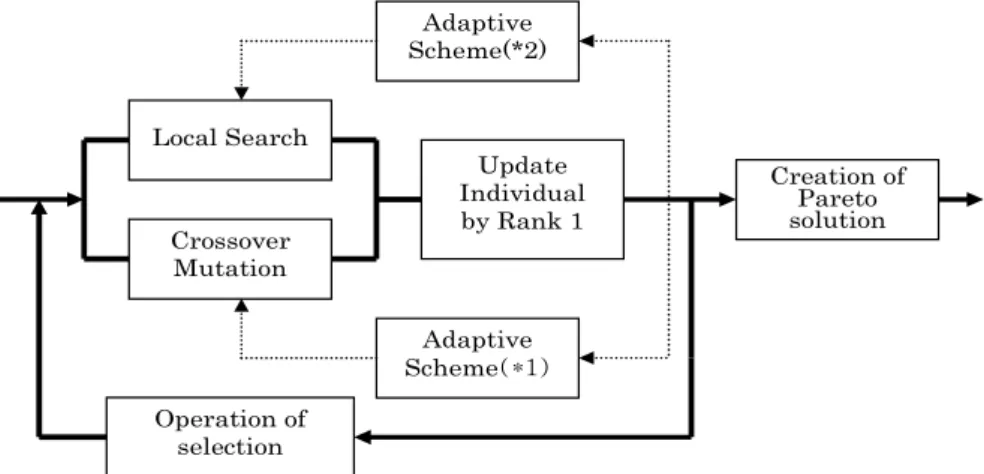
図 6-1 提案するハイブリッド GA の全般的な流れ ... 61
図 6-2 親染色体から子染色体の生成の流れ ... 62
図 6-3 メンバーシップ関数 ... 67
図 6-4 数値例(Ex.I)のシステム構成 ... 69
図 6-5 数値例(Ex.I)に対して得られたパレート解 ... 70
図 6-6 交叉確率の変化 ... 72
図 6-7 突然変異確率の変化 ... 72
図 7-1 光ファイバ通信システム(FO-system)の構成 ... 76
図 7-2 直列接続の通信モデル ... 77
図 7-3 サブシステムのブロック図 ... 78
図 7-4 提案した多目的 GA の探索手続き ... 82
図 7-5 多目的 GA の染色体の流れ ... 83
図 7-6 指向性遺伝子法の例 ... 86
図 7-7 直並列接続の通信システム ... 87
図 7-8 ブリッジ接続の通信システム ... 88
図 7-9 ネットワーク接続の通信システム ... 90
図 7-10 Model-1 のパレート妥協解 ... 96
図 7-11 Model-2 のパレート妥協解 ... 96
図 7-12 Model-3 のパレート妥協解 ... 96
図 7-13 弓型面積&被覆率の推移 ... 97
図 7-14 改良パレート解保存戦略の効果 ... 97
図 7-15 シェアリングの効果 ... 98
図 7-16 適応型スキームによる LS の効果 ... 98
図 7-17 適応型スキームによる LS の効果(2) ... 99
- 表 目 次 -
表 4-1 Test-1 の設計データ ... 44
表 4-2 Test-2 の設計データ ... 46
表 4-3 Test-1 の実験結果 ... 46
表 4-4 Test-2 の実験結果 ... 47
表 5-1 Test-1 と Test-2 の実験結果 ... 56
表 6-1 ファジーデシジョンテーブル&ルックアップテーブル ... 66
表 6-2 数値例(Ex.I)におけるシステム設計データ ... 69
表 6-3 パレート解の数 ... 71
表 6-4 正の理想解とのユークリッド距離 ... 71
表 6-5 シミュレーション計算時間 ... 71
表 7-1 直並列接続のサブシステムの設計データ ... 88
表 7-2 ブリッジ接続のサブシステムの設計データ ... 89
表 7-3 ネットワーク接続のサブシステムの設計データ ... 91
表 7-4 ネットワークを構成する機器の不稼働率 ... 92
表 7-5 ネットワークを構成する機器の価格 ... 92
表 7-6 光ファイバケーブルの価格($/m) ... 93
表 7-7 改良パレート解戦略の効果の比較表 ... 93
表 7-8 シェアリングと LS 効果の比較表 ... 94
表 7-9 適応型スキームと局所探索の効果の比較表 ... 95
表 7-10 Model-3 の探索結果の例 ... 95
表 7-11 適応型スキームと突然変異の組合せ効果 ... 99
第1章 序 論
現代社会ではインターネットに代表される情報通信システムを基盤とした各種業務シ ステムが多数稼動している。例えば,株式の売買を行うネット証券会社,個人の決済を対 象としたネット銀行,商店や企業が運営するネット通信販売,相互信頼で運用されている 電子メールシステム(E-mail)など,情報通信システムを基盤とした業務システムである。
これらは,従来の業務システムとの置き換え,あるいは共存しながら,急速に発展してい る。このような情報通信システムを支えているのが,通信基盤となる各種の通信システム である。特に,都市間を結ぶ通信システムはライフラインの一つとして重要であり,これ らの通信システムは高速かつ大容量の通信回線で,高信頼性が要求されている。一般に,
通信システムに機器故障,人的障害,自然災害による回線障害が発生した場合,企業や個 人は多大な損失を受ける。例えば,E-mailが半日停止すると,E-mailに依存した業務が中 断となり,単なる停止ではなく,情報の遅延や欠落のために大きな損失を受ける可能性が ある。さらに,証券や銀行の業務システムはリアルタイム性の高い情報を取り扱っている。
株の売買情報,為替決済情報,預金払戻し停止情報やクレジットの信用情報などである。
これらの情報がもし遅延した場合の社会的影響は大きい。このように,情報通信システムは 現代社会の基盤であり,システムの高信頼化設計問題は重要な研究課題のひとつである。
一般に,システムは処理機能により複数のサブシステムから構成され,さらに,サブシス テムは複数のユニットから構成されている。サブシステムには,ハードウェア及びソフト ウェアが含まれる。システムは,サブシステムを直列,並列あるいはブリッジ状に組み合 わせてシステムを構成する。一般に,システムの高信頼化設計を行う方法には,大きく2 つのアプローチがある。ひとつは,信頼性の高い部品やユニットを使用することで,「装 置の設計や製造において構成要素にフォールトが発生しないようにする方法」に基づくア プローチであり,フォールトアボイダンス(fault avoidance)と呼ばれている。しかし, サブ システムやユニットの高信頼化は製造コストに関する予算制約などのため,信頼度の高い 部品やユニットの選択にも限界がある。二つ目は,フォールトの発生は避けられないと言 う前提に基づくアプローチでフォールトトレランス(fault tolerance) と呼ばれている。フ ォールトトレランスは,付加装置や付加機能の影響を自動的に防ぎ,フォールトが起きて もシステムとしては正しい機能を保持させようとするアプローチである。言い換えると,
このアプローチではシステムの一部が故障しても他の部分がその不具合を補い,全体とし て正常に機能するような仕組みである。この考え方は非常に基本的なもので,大規模な通 信システムに古くから用いられている。フォールトトレランスの技術は,サブシステムや ユニットを並列に配置することで,その冗長性を利用して信頼性を向上させる。並列にサ
ブシステムやユニットを配置する場合,①予備のサブシステムやユニットとして故障時に 切り替えるタイプのものを待機冗長構成と呼び,②並列化したサブシステムやユニットに も同時に異なる仕事をさせるものを並列冗長構成と呼んでいる。本研究では,高信頼化シ ステムを実現させる手法として,並列冗長構成および待機冗長構成を想定している。
システムの高信頼化設計には,サブシステムの容量や重量など資源の制約下において,
各サブシステムのユニットを待機冗長構成や並列冗長構成とすることで,システム信頼度 や稼働率を最大化する信頼性最適化設計問題として扱える。このように信頼度や稼働率を 最 大 化 す る 問 題 は 他 の 資 源 を 制 約 条 件 と す る こ と で 単 一 目 的 の 非 線 形 整 数 計 画 (nonlinear integer programming: nIP) モデルとして定式化される。さらに,信頼度と総コ スト,稼働率と総コストなど,複数の資源が競合関係にあるシステムの設計は多目的信頼性 最適化問題となる。このような多目的最適化問題は多目的非線形整数計画(multiobjective nIP)モデルとして定式化される。
最適化設計問題を解くためのメタヒューリステックな手法として多くの遺伝的アルゴ リズム(Genetic Algorithm: GA)が研究されている。多目的非線形整数計画モデルを解く手 法としてGAの持つ多点探索という特徴に注目し,直接にパレート最適解を求めることを 目的とした多目的遺伝的アルゴリズム(Multiobjective Genetic Algorithm:多目的GA) に関 する研究が報告され,その有効性が検証されている。なお,パレート最適解とは他のすべ ての目的関数において実行可能な最適解に優越されないような解である。
本論文の構成は,第1章では研究の背景,第2章では不稼働率によるシステム信頼性モ デルを提示し,第3章では多目的GAの一方法を提案する。第4章と第5章では,単目的 信頼性最適化問題による単目的GA技法の検証,第6章では多目的信頼性最適化問題によ る多目的GA技法の検証,第7章では多目的GAを通信システムの信頼性最適化設計へ適 用する。初めに不稼働率による数学モデルを構築し,次に多目的GA技法の検証を行って いる。最後に,第8章では提案した多目的GAの技法の効果について結論を述べる。次に 各章の概要を説明する。
第2章では,システムの信頼度と稼働率を使用した信頼性最適化のための信頼度による モデル構築方法を説明する。次に,不稼働率による通信システムのモデル構築方法を提示 する。これは故障の木解析(Fault Tree Analysis: FTA)で使われる最小カットセット(minimal cut set)を用いてシステム不稼働率の数学モデルを構築する方法である。
第3章では,多目的最適化問題を取り扱うための多目的GAの一技法を提案する。一般 的にGA は多点探索による大域探索には優れているが,局所探索の機能は劣っている。こ のため厳密解法に比べ最終的に得られる解の精度が劣る可能性が高いという問題点があ る。また,GA は解集団のサイズ,最大世代数,交叉率,突然変異率などのパラメータを 事前あるいは状況に適応して調整することが必要である。さらに,多目的GAでは解がパ レート最適解となることから目的関数間でバランス(トレードオフ)の取れた多数の解が 存在する。パレート最適解を効率よく求めるためには,多目的に適したGA技法が必要あ
る。本論文では,多目的GAの技法として,①選択手法は改良パレート解保存戦略,②局 所探索は適応型スキームによる近傍探索技法,③均等なパレート最適解を求めるためのシ ェアリング技法を提案する。さらに,多目的GAにおいてパレート最適解が不明な場合の評 価方法として,弓形面積,被覆率,パレート解の数と正規化したパレート解の図示を採用 する。
第4章では,単目的信頼性最適化モデルを用いて適応型スキームによる局所探索技法を 提案し,その有効性を数値実験で検証する。この適応型スキームとはある解が最適解の近 傍にあると判断した場合,局所探索を働らかせる制御を行うことである。それは,広域探 索で最適解の近傍解を求め,さらに局所探索で最適解を求めるためである。局所探索は広 域探索を抑える働きがあるが,この抑制を制御して局所探索の効果を発揮させるのがこの 適応型スキームである。
第5章では,適応型ハイブリッドGAを用いて,単目的信頼性最適化モデルによる信頼 度の最適化設計を行う。ハイブリッド型遺伝的アルゴリズムを実現する適応型スキームは 交叉率と突然変異率を制御する方法を提案し,数値実験によって,その有効性を検証する。
第6章では,多目的GAの技法のひとつであるパレート解保存戦略,局所探索と適応型 スキームによる交叉率と突然変異率の制御法を提案する。適応型スキームにはファジィ論 理制御(FLC)を用いて交叉率と突然変異率を制御する方法を提案する。また,局所探索 は単目的化した評価値を用いた改訂シンプレックス探索法を提案する。これらの多目的 GAの技法を多目的な信頼性最適化問題の数値実験によって,その有効性を検証する。
第7章では,提案したシステム不稼働率による数学モデルの構築方法を用いて通信シス テムモデルを構築する。次に不稼働率と総コストを最適化の基準として,通信システムの パレート最適妥協解を求める方法を提案し,多目的GAの有効性を数値実験によって検証 する。この多目的GAの技法は第3章で提案した多目的GAの技法を具体化したものであ り,①改良パレート解保存戦略,②適応型スキームを用いた局所探索技法,③パレート解 を均等に分散化させるシェアリング技法などである。なお,実験に使用する通信システム モデルは,①直並列接続の通信システム,②ブリッジ接続の通信システム,③複雑なネッ トワーク構成の通信システムの3モデルである。これらのモデルを用いて多目的GAの技 法の有効性を数値実験により検証する。
第8章では,結論として,本研究で得られた多目的信頼性最適化問題に対する多目的 GAの成果を要約する。
本論文では,システムの高信頼化設計における信頼性最適化の手法としてハイブリッド 型多目的GAを提案した。このハイブリッド型多目的GAを多目的信頼性最適化設計に適 用し,その有効性を数値実験により検証する。
図1-1 章の相互関連図
(第1章 序論)
研究の背景と目的
(第2章 システム信頼性最適化設計) 並列冗長構成および待機冗長構成に よるシステム信頼性最適化設計と不稼 働率によるモデリング方法を提案する。
(第3章 多目的遺伝的アルゴリズム) 多目的最適化設計のための多目的 GAのいくつかの技法を提案する。
(第7章 多目的GAによる通信システムの信頼性最適化設計)
多目的最適化設計問題として,通信システムにおける信頼 性最適化設計のための多目的信頼性最適化モデルを用いて,
ハイブリッド型多目的GAの有効性を検証する。
(第8章 結言)
本論文を総括すると共に今後の研究課題 を検討する。
(第5章 適応型ハイブリッドGAによる信頼性最適 化設計)
単目的信頼性最適化モデルを用いて,適応型 ハイブリッドGAの有効性を検証する。
(第6章 多目的 GA による多目 的システムの信頼性最適化設 計)
多目的信頼性最適化モデル を用いて,多目的GAのための 技法(ファジィ論理制御等)の 有効性を検証する。
(第4章 適応型局所探索 GA による信頼性最適 化設計)
単目的信頼性最適化モデルを用いて,適応型 スキームによる局所探索技法を提案し,その有 効性を検証する。
第2章 システム信頼性最適化設計
2.1 まえがき
情報通信システムは現代社会の基盤であり,情報通信システムの高信頼化設計問題は重 要な研究課題の一つである。高信頼性が要求されるシステムの設計では,高信頼度と高稼 働率,総コストの低減化がひとつの目標である。一般に,システムは処理機能により複数 のサブシステムから構成され,さらに,サブシステムは複数のユニットから構成されている。
本論文でのシステムの高信頼化はフォールトトレランスの考え方に基づき各サブシステ ムのユニットを待機冗長構成や並列冗長構成とすることで実現する。このようなシステム は,サブシステムやユニットのコスト,容量や重量など資源の制約下において,システム 信頼度や稼働率を最大化する信頼性最適化設計問題として扱える。
さらに,多目的最適化問題とは,信頼度と総コスト,稼働率と総コストのように,複数 の資源が競合関係にある最適化問題である。このような複数個の目的関数を伴う多目的な 最適化問題は多目的非線形整数計画(multiobjective nIP: mo-nIP)として定式化される[9]。
この章では,システムの高信頼化設計問題として,不稼働率と総コストを最小化する通 信システムの最適設計を例にして,システムの不稼働率による数学モデルのモデリング手 法を提案する。
2.2 システムの信頼性
システムの信頼性と信頼度は日本工業規格で,次のように定義されている。信頼性
(reliability)は,「アイテムが与えられた条件で規定の期間中,要求された機能を果たすこと
ができる性質」(JIS Z8115)と規定されている。また,信頼度(reliability)は,「アイテムが 与えられた条件で規定の期間中,要求された機能を果たす確率」(JIS Z8115)と規定され ている。故障とは「アイテムが規定の機能を失うこと」と定義されている。なお,信頼度 をRとしたとき,F =1−Rを不信頼度(unreliability)と呼ぶ。ここで,アイテムとは,シス テム,サブシステムやユニットを意味する。
2.2.1 信頼度と故障率[10]
システム信頼性の諸特性を表す最も基本的な尺度が信頼度と故障率である。ここで,X
(X ≥0)をある製品の寿命とする。同じ製品でも材料のばらつき,工程の状況や使用環 境などでX はばらつく,一般に,X は確率変数と呼ばれ,正規分布,指数分布やワイブ
ル分布に従うことが知られている。寿命X の確率密度関数 f(x)が既知のとき,信頼度関 数を
∫
∞=
>
≡ X t
tf x dx
t
R ( ) Pr{ } ( )
と定義する。これは寿命が任務時間t以上の稼動,
つまり,t時間以内に故障しない確率を表し,t=0 の時点でR(0)=1であり,時間の経過につれて減 少し,最後は0に近づく,逆に,t時間以内に故 障する確率は
∫
=
≤
≡ X t t f x dx
t
F ( ) Pr{ } 0 ( )
で表わされる。F(t)を故障分布関数と言う。ここで,R(t)+F(t)=1である。
ここでは,確率分布は指数分布であるとして,論点を進める。そこで,確率密度関数お よび信頼度関数R(t)は,
) 0 ( )
(
) 0 , 0 (
) (
≥
=
=
≥
>
=
∞ − −
−
∫
e dx e tt R
t e
t f
t t
t t
λ λ
λ
λ
λ λ
と表現できる。さらに,平均故障寿命(Mean Time To Failure: MTTF)と故障率
λ
(t)は次 のように展開できる。MTTF ) 1
(
MTTF= 1
λ
=λ
=λ
tここで,tは経過時間である。MTTFは非修理システムの故障寿命の平均時間である。
以上のように,信頼度とは,故障の発生確率により定まる値であることがわかる。また,
故障の発生は稼働率(2.2.2を参照)にも大きく関係している。
2.2.2 システムの不稼働率[11]
システムの信頼度はシステムが故障しない確率であるが,稼働率はシステムが稼動する 確率である。不稼働率はシステムが故障等で稼動できない確率である。例えば,年単位の 不稼働率が0.01とすると,年に1%の期間が稼動できないことになる。平常運転を想定す ると通信システムのような場合,不稼働率の方が直感的で扱いやすい指標である。
平均故障時間間隔(Mean Time Between Failures: MTBF)は次に故障が起こるまでの平 均時間である。MTBFは修理可能なシステムの定義であり,MTTFは非修理なシステムの 定義である。双方とも,平均故障時間から見ると同じような意味と言える。ここでは,MTBF を用いて,稼働率を定義する。稼働率やMTBFの単位は,年や時間である。なお,ここで
R (t) f (x)
t F (t)
x f (x)
図 2-1 確率密度関数と信頼度
・・・・・・・・ (2-3)
・・・・・・・・ (2-1)
・・・・・・・・ (2-2)
・・・・・・・・ (2-4)
は1年を8760時間として計算を行うこととする。
故障回数 全稼動時間
=
MTBF
8760 ) MTBF(hours )
MTBF(years =
稼働率(availability: A )は,システムが故障しない場合は1.0となり,故障で全く稼動 しない場合は0.0となる。本論文では,稼働率の定義は次の通りとする。
MTBF MTTR
MTBF
= +
A
ここで,MTTR:故障の平均修復時間,MTBF:平均故障時間間隔である。MTTR は故障 が発生してから修復までの平均時間である。
不稼働率(unavailability: U )は U =1−Aと定義される。不稼働率は,一定期間でシ ステムが稼動していない時間の比率である。なお,通信システムの設計では評価値として 不稼働率を使用している[12]。
2.2.3 システム信頼性の向上
一般に,システムは処理機能により複数のサブシステムから構成され,さらに,サブシス テムは複数のユニットから構成されている。サブシステムには,ハードウェア及びソフト ウェアが含まれる。一般に,システムの高信頼化設計を行う方法には,大きく2つのアプ ローチがある。ひとつは,信頼性の高い部品やユニットを使用することで,「装置の設計 や製造において構成要素にフォールトが発生しないようにする方法」に基づくアプローチ であり,フォールトアボイダンス(Fault Avoidance)と呼ばれている。しかし, サブシステ ムやユニットの高信頼化は製造コストに関する予算制約などのため,信頼度の高い部品や ユニットの選択にも限界がある。二つ目は,フォールトの発生は避けられないと言う前提 に基づくアプローチでフォールトトレランス(Fault Tolerance) と呼ばれている。
フォールトトレランスとは,付加装置や付加機能の影響を自動的に防ぎ,フォールトが 起きてもシステムとしては正しい機能を保持させようとするアプローチである。言い換え ると,このアプローチではシステムの一部が故障しても他の部分がその不具合を補い,全 体として正常に機能するような仕組みである。この考え方は非常に基本的なもので,大規 模な通信システムに古くから用いられている。フォールトトレランスの技術は,サブシス テムやユニットを並列に配置することで,その冗長性を利用して信頼性を向上させる。並 列にサブシステムやユニットを配置する場合, 予備のサブシステムやユニットとして故 障時に切り替えるタイプのものを待機冗長構成と呼び, 並列化したサブシステムやユニ ットにも同時に異なる仕事をさせるものを並列冗長構成と呼んでいる。本研究では,高信 頼化システムを実現させる手法として,並列冗長構成および待機冗長構成を想定している。
(1) 並列システム・・・一般的な冗長化構成である。
9 待機冗長構成(待機冗長機構): 故障が発生した場合,自動的に切り替える仕組
・・・・・・・・ (2-5)
・・・・・・・・ (2-6)
みを持っている構造である。この故障が想定内なら予備のサブシステムが稼動す るので,システム全体に影響はおよばない。
9 並列冗長構成(並列冗長機構): 常に並行してサブシステムが稼動している構造 である。故障時は縮退運転となる。ただし,予備のサブシステムを並行運転して いる場合は,故障が想定内ならシステム全体に影響はおよばない。
(2) 2重化システム・・・同じ処理を2つのサブシステムが行う構成である。
9 通常は2つのサブシステムとも同じ処理を行っている。並列冗長構成と似ている が,2つのサブシステムが同じ処理をしているところが異なる。故障が起きた場 合,ひとつのサブシステムで運転が行われるため,システム全体に影響がおよば ない。
9 この構造は,大型のWebサーバシステムなど,無停止システムの場合に使われる。
また,通信システムの中継機器や端末機器など無停止が要求される機器に使われ る。
以上のように2種類のシステムがあるが,他に「同じ処理を複数のシステムが行い,そ の結果を比較しながら処理を行う」と言う構造のシステムもある。このような構造は,非 常に高い信頼性を確保することを求められるシステムで採用される。たとえば,スペース シャトルのコンピュータシステムや原子炉の制御システムなどである。
2.3 冗長化構成によるシステム信頼性向上
2.3.1 システム信頼度の計算方法
一般に,n個のサブシステムやユニットから構成されるシステムの信頼度の計算方法に ついて述べる。サブシステムの基本的な接続には,直列接続と並列接続がある[13]。直列接 続の場合は,どれかひとつ以上のサブシステムが故障したときにシステムが故障するとし,
並列接続の場合は,並列冗長構成と見なして,すべてのサブシステムが故障したときにシ ステムが故障すると想定する。なお,本論文における信頼性最適化設計においては,待機 冗長構成の場合も予備系サブシステムが瞬時に切り替ると考えて,予備系サブシステムを 含めて並列冗長構成と見なすことにする。
図2-2のようにサブシステムを直列に接続した場合,
4 3 2
1 R R R
R
R= ⋅ ⋅ ⋅
と論理積の演算式となる。ここで,R:システム信頼度,R1~R4:各サブシステムの信 頼度である。図2-3のようにサブシステムを並列に接続した場合,
) 1 )(
1 )(
1 )(
1
( R1 R2 R3 R4
R= − − − −
と不信頼度の論理積となる。ここで,R:システム信頼度,R1~R4:各サブシステムの 信頼度である。
・・・・・・・・ (2-7)
・・・・・・・・ (2-8)
R2
R1 R3 R4
R2 R1
R3
R4
Fig.2-2 Series connection Fig.2-3 Multiple connection of a subsystem of a subsystem
図2-2 サブシステムの直列接続 図2-3 サブシステムの並列接続 図2-4のようにサブシステムが直・並列に接続されたシステムの場合,並列接続したブロ ックを,さらに直列に接続するので,
)) 1 )(
1 ( 1 ))(
1 )(
1 ( 1
( R1 R2 R3 R4
R= − − − − − −
となる。ここで,R:システム信頼度,R1~R4:各サブシステムの信頼度。
R2
R1 R3
R4
Fig.2-4 Series and multiple connections of a subsystem
図2-4 サブシステムの直・並列接続 2.3.2 システム不稼働率[11]の計算方法
n個のサブシステムやユニットから構成されるシステムの不稼働率の計算方法につい て述べる。サブシステムの基本的な接続には,直列接続と並列接続がある。なお,計算の 考え方は信頼度計算と同じである。並列接続は並列冗長構成と見なすことにする。システ ムは信頼度計算で使用した図 2-2,2-3,2-4 を使用する。なお,図中のR1をU1と読み替 えて使用する。
サブシステムを直列に接続したシステム(図 2-2)の場合,どれかひとつ以上のサブシ ステムに故障が発生したときにシステムが故障する。システムの不稼働率は,稼働率の論
・・・・・・・・ (2-9)
理積となり,次のように表現できる。
) 1 )(
1 )(
1 )(
1 (
1 U1 U2 U3 U4
U = − − − − −
ここで,U:システム不稼働率,U1~U4:各サブシステムの不稼働率。
サブシステムを並列に接続したシステム(図 2-3)の場合,すべてのサブシステムに故 障が発生したときにシステムが故障する。システムの不稼働率は,サブシステムの不稼働 率の論理積となり
4 3 2
1 U U U
U
U = ⋅ ⋅ ⋅
と表せる。この式が成立つ条件は,サブシステムやユニットが並列冗長構成の場合であ る。もし,並列冗長構成でなく,単に並列に配置してあるばあいは,あるサブシステムが 故障して,このサブシステムに割当てられた業務が停止することになる。例えば,都市間 の通信システムにおいて,通信回線が並列に2回線あり,この回線は常に全回線が通信容
量の100%で情報通信が行われていると仮定すると,並列ではあるが冗長構成にはなれな
い。あるいは,回線切替え装置がない場合も同様に冗長構成にはなれない。
サブシステムを直・並列に接続したシステム(図2-4)の場合は次のように表せる。
) 1
)(
1 (
1 U1 U2 U3 U4
U = − − ⋅ − ⋅
ここで,U:システム不稼働率,U1~U4:各サブシステムの不稼働率。
2.4 信頼性最適化設計モデル
高信頼化を実現する最も代表的な方法の1つに並列冗長構成や待機冗長構成を採用し た設計方法があり,これを冗長化設計と呼ぶ[14]。冗長化設計はフォールトトレランスなシ ステムを実現するための方法である。「安定した運用」という目的を実現するためには,
高い信頼性が要求される。冗長性を持たせるには予備のサブシステムやユニットが必要で ある。しかし,予備のサブシステムやユニットを配置することは製造や設置に関わるコス トが高くなるため,経済性の低下につながる恐れがある。したがって,これらの高信頼性 システムを実現するためには,高い信頼性と経済性の両方を考慮しなければならない。信 頼性と経済性を考慮して,効果的に冗長化設計を導入することは,二目的非線形整数計画 (bi-criteria nonlinear integer programming: bi-nIP) 問題への定式化により具体化される。シ ステムの最適化はシステム信頼度の最大化とシステム構築コストの最小化を同時に考慮 する。
そのような最適設計問題で想定するシステムは, n個のサブシステムからなり,第jサブ システムは同じ信頼度を持つxj個のユニットが並列に冗長構成とする。なお,各サブシス テムのユニット数xjは決定変数である。高信頼化システムを設計するために必要なi種類 諸資源の非線形制約条件gi(x) (i=1,2, …, m) の下で,目的関数である非線形な信頼度R(x)
・・・・・・・・ (2-10)
・・・・・・・・ (2-12)
・・・・・・・・ (2-11)
とシステムのコストC(x)を最適化する問題は,次のようなbi-nIPモデルに定式化される[15]。
bi-nIP:
ここで,x=[x1 x2 ・・・ xn] で,rj(xj)とcj(xj)はそれぞれサブシステムjにおけるユニットの 信頼度とコストであり, biは資源iの制限量,xjLとxjUはユニット数xjの下限と上限である。
このモデルを,n個の決定変数,m個のシステム制約条件,q個の目的関数を伴う多目 的非線形整数計画問題に一般化すると,次のように書き直すことができる[1][13]。
mo-nIP:
n j
x x x
m i
b g
q t
f z
U j j L j
i i
t t
, , 2 , 1 integer, :
,..., 2 , 1 , ) ( t.
s.
,..., 2 , 1 ), ( min
= K
≤
≤
=
≤
=
= x
x
ここで, ft(x)はt番目の非線形な目的関数,gi(x)はi番目の非線形なシステム制約条件 である。なお,目的値ztは正の値をとる。
さらに,複数の決定変数がある場合は,次のように書き直すことができる。
mo-nIP:
l k
n j
x x x
m i
b g
q t
f z
U kj kj L kj
i l i
l t
t
, , 2 , 1 , , 2 , 1 integer :
,..., 2 , 1 , ) , , , ( t.
s.
,..., 2 , 1 ), , , , ( min
2 1
2 1
K K
K K
=
=
≤
≤
=
≤
=
=
x x x
x x x
ここで,ft(x1,x2,K,xl)はt番目の非線形な目的関数,gi(x1,x2,K,xl)はi番目の非線形な システム制約条件である。x1,x2,K,xlはl種類の決定変数である。例えば,光ファイバ通 信システムの一つを例にすると,決定変数は,サブシステムj における光ファイバ線数,
ケーブルの心線数や筐体のカード収納数などに相当する。
情報通信システムの場合,高信頼化と低コスト化,高稼働率化と低コスト化は競合する 問題であり,システム信頼度や稼働率,総コストを最適化するシステム設計では,コスト と信頼性(信頼度,稼働率,MTBF等)のトレードオフを考えなければならない。このた め,現実的には状況・環境に応じて適切な妥協点を求める必要がある。
通信システムの信頼性最適化設計の指標として不稼働率を用いている[12]。信頼度は故障 が起こる確率であり,故障の修復時間は関係しない。修理ができないシステム(通信衛星
・・・・・・・・・・・ (2-13)
・・・・・・・・・・・ (2-14)
・・・・・・・・・・・ (2-15)
∑
∏
=
=
=
=
=
=
n
j j j n
j j j
x c C
f
x r R
f
1 2
1 1
) ( )
( ) ( min
) ( )
( ) ( max
x x
x x
n j
x x x
m i
b x g g
U j j L j
n
j
i j ij i
, , 2 , 1 , integer :
, , 2 , 1 , ) ( )
( s.t.
1
K K
=
≤
≤
=
≤
=
∑
=
x
・・・・・・・・・・・ (2-16)
など)の場合,評価の指標として信頼度やMTTFを使用する。しかし,修理が可能なシス テムの場合,稼働率や MTBFや MTTR が望ましい。特に,不稼働率の場合,システムが 故障で停止している時間を表すので指標として理解しやすい。
2.5 通信システムの信頼性最適化設計モデル
インターネットの基盤となる通信システムは都市間を結ぶ広域なものから構内やビル 内のコンピュータ機器を結ぶ局所的なものまで存在する。この通信システムは 都市間を 結ぶ中長距離通信システム, 都市内の拠点を結ぶ都市通信システム, ビルやローカル 地域内の機器を結ぶ構内通信システム, 個人住宅内の機器を結ぶ宅内通信システムがあ る。それぞれの通信システムは通信目的と利用環境が異なるため,その通信技術や機器構 成が異なる。
これら通信システムの形状は,その通信目的と通信距離により異なる構成が採用されて いる。ネットワークのトポロジー(形状)には次のような構成がある。
① スター型: コンピュータや装置間を相互に接続する小規模や中規模の通信ネットワ ークに使われる。最近では,小規模なものはSwitching HUBを階層状に接続した階層 構造の通信システムが多く使われている。
② バス型: コンピュータや装置間の相互接続に小規模な通信システムの構成に使われ る。最近は,この形状のものが少なくなった。
③ リング型: ビルや地域を相互に接続する中規模な通信システムの構成に使われる。
光ファイバを使って高速で大容量の通信システムが構築できる。これは幹線向きの通 信システムである。
④ ネットワーク型: 複数の都市と都市を相互に網接続する大規模な通信システムに使 われる。この場合,都市間を見ればポイントとポイントを結ぶ中長距離通信システム である。
信頼性最適化設計モデルには,中長距離通信システムを用いる。中長距離通信システム は都市間を結ぶ広域なネットワークなので,ポイントとポイント間通信システムをサブシ ステムと見なした通信システムと言える。例えば,図2-4の直並列接続の構成である。
2.5.1 FTA(故障の木解析: Fault Tree Analysis)[16][17]
Fault Tree Analysisには,イベントツリー(Event Tree)とフォルトツリー(Fault Tree)の 2つがある。モデルの構築にはフォルトツリーを使用する。FTAは図式による解析手法で ある。特定の事象とその原因となる事象の関係を図式で表現する。事象記号は,事象
(event):矩形の枠で,事象を表す。入力と出力は論理値である。最大レベルの事象をト ップ事象(top event, root event)と呼び,最初に起こる最低レベルの事象を基本事象と呼 ぶ。
基本事象(basic event, terminal event):丸形の枠で事象を表す。基本となる事象を表す
ので,この事象からすべてが発生する。この他に,否展開事象,通常事象がある。たとえ ば,自動車を想定すると,基本事象は「アクセルの故障」や「ブレーキの故障」などであ る。
この場合,トップ事象は「自動車の故障」である。アクセルの故障やブレーキの故障,
タイヤのパンクなどが発生すると自動車は走行することができない。
これらの事象を連結するのが論理ゲートである。論理ゲートは,① ANDゲート(AND gate):すべての入力事象が起きたときの出力事象が起こる。つまり,演算は論理積であ る。② OR ゲート(OR gate):入力事象のうち,どれかひとつが起きれば,出力事象が 起こる。つまり,演算は論理和である。 制約ゲート(INHIBIT gate):このゲートは入力 事象が起きると共にある条件を示す事象が起きたときのみ出力事象が起こる。本論文の構 築では使用しない。
Fault Tree Analysisには,最小カットセット(minimal cut set: MCS)と最小パスセット (minimal path set: MPS)という考え方がある。カット(cut)とは基本事象の集合であり,
カットに含まれるすべての基本事象が起こった時に,トップ事象が発生することを示すも のである。通常,複数のカットが存在する。トップ事象を起こすために,必要にして十分 なカットセットを最小カットセットと呼ぶ。つまり,カットに含まれるすべての事象が起き たときに,トップ事象が起こるカットの最も少ない集合が最小カットセットである。また,
同じような基本事象の集合であるが,その中に含まれるすべての基本事象が起こらないと きに,トップ事象が起こるものをパスとよび,必要で最小限のパスを最小パスセットと呼 ぶ。モデルの構築には最小カットセットを使用する。最小カットセットは,システムの弱 い点を摘出するものであり,FTAでは最小パスセットより重要である。
2.5.2 最小カットセットによるモデリング手法
システム信頼度の数学モデルの構築にも最小カットセットが使われている[19]。本論文で は,故障分析の最小カットセットを基にしてシステムの不稼働率による数学モデルの構築 方法を提案する。システムの不稼働率モデルを構築するには,最小カットセットを組み合 わせる。次に,構築手順を示す。
① 設計対象のシステムのFault Tree (FT)を作成する。
② FTから故障発生の関係を論理式で表現する。
③ 論理式を展開して最小カットセットを求める。
④ 各々のカットに対する不稼働率を求める。
⑤ 各々の不稼働率を直列接続とみなしてシステムの不稼働率を求める。
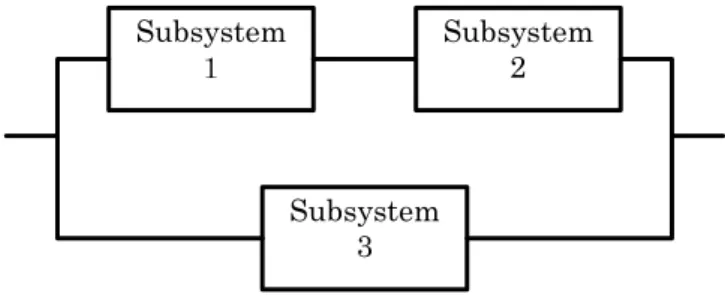
直・並列接続の光ファイバ通信システム(図 2-5)を使って,モデルの構築法を説明す る。ここで求める目的関数は稼働率最適化のためのシステムの評価尺度である。通常,通 信系の信頼性評価には不稼働率が使われている[12]。本論文でも,不稼働率を評価尺度とし て採用している。システムは複数のサブシステムをネットワーク形状に接続して構築する。
サブシステムとは都市間をポイントとポイントで結ぶ光ファイバ線と線路,中継器,両端
の伝送機器などで構成される通信システムである。サブシステムは要求回線とは別に待機 冗長機構の予備回線(図2-6)を備えているとする。
図2-5 直・並列接続の通信システムのブロック図
Cable lines
Fig. 2-6 backup lines of subsystem Subsystem
Backup cable lines
図2-6 サブシステムの予備回線(待機冗長機構)
(A)最初,提案のモデル式との比較のために,並列冗長構成におけるシステムの 不稼働率(US)を計算する。
直列接続の不稼動率は,稼働率の論理積で表現でき,並列接続の場合,並行冗長機構成 であれば,不稼働率は不稼働率の論理積で表現できる。この設計条件は,「並行するサブ システムがすべて予備回線として使用できる」ことである。次に,システム不稼働率の計 算式を示す。
Subsystem
1 Subsystem
2
Subsystem 3
Fig.2-5 Optic-fiber communication network system model
ここで,US:システム不稼働率,A1~A2:各サブシステムの稼働率,U1~U4:各サブシステム の不稼働率。
(B)提案する最小カットセットによるシステム不稼働率(UM)の計算手順を説明する。
ここで,注意することは,設計条件が(A)とは異なることである。設計条件は,「並行す るサブシステムは要求回線なので,予備回線として使用できない」ことである。この結果,
故障時のバックアップ回線はサブシステム内の予備回線のみで,ネットワーク状に接続さ れている回線網はバックアップとして使用できません。
Step 1: システムの最小カットセットを求める。これはシステムが不稼動状態になる
事象の組合せをすべて調べることである。
(1) システムのブロック図(図2-5)を見ながらFault Tree(FT)をANDゲートとORゲー トを使用して作成する [16][17][18]。並列接続はANDゲートで,直列接続はORゲートで図式 化する。トップ事象(T) は,「通信回線が停止する」である。基本事象(Bi) は,「サブ システムの故障」である。
(2) 論理式を展開して MCS を求める。FT を論理式に書き直す。AND ゲートは論理積,
OR ゲートは論理和で,基本事象からトップ事象までを論理式にする。次に,論理式を展 T
B1 B2
B3 OR gate
AND gate
基本事象 Top 事象
Fig. 2-7 Fault Tree of system
・
+
図2-7 システムのFault Tree図
3 2 1 3 2 3 1
3 2 1
3 2 1
) 1 )(
1 ( 1 (
) 1
(
U U U U U U U
U U U
U A A U
S− +
=
⋅
−
−
−
=
⋅
⋅
−
=
・・・・・・・・・・・ (2-17)
開する。
ここで,T:トップ事象,B1,B2,B3:各サブシステムの故障が起こる確率。
システムのMCSは論理式の和で区切られた項である。つまり,どれか一つのカットが起こ る時にトップ事象が起こる。このシステムのMSCは
[ S1, S3 ], [ S2, S3 ]
となる。ここで,S1: Subsystem-1, S2: Subsystem-2, S3: Subsystem-3である。
Step 2: 各MCSの状態に対する不稼働率を求める。
カットの要素 [ S1, S3 ] は並列の関係にある。S1とS3が補間関係(BackUpが可能)に ある場合,不稼働率はU1×U3となる[12]。 しかしながら,S1とS3は要求された回線数をす べて使用していることを前提としている。 このため,補間関係にはない。
そこで,S1と S3の内,最初に故障するサブシステムをカットの不稼働率とするのが,最 善である。ゆえに,S1と S3の不稼働率の最大値を,このカットを組み合わせたものを不 稼働率とする。
ここで,Ua: S1とS3を組み合わせたMCの不稼働率, Ub: S2とS3を組み合わせたカット の不稼働率, U1: サブシステムS1の不稼働率, U2: サブシステムS2の不稼働率,
U3: サブシステムS3の不稼働率。
Step 3: 一般にカットは複数存在する。これらのカットは,少なくても一つのMCに故
障が起きた場合,システムは不稼動状態となる。ゆえに,直列接続と見なすことができる。
つまり,稼働率の論理積で表現できる。 稼働率の論理積を不稼働率で表すと (1-Ua)(1-Ub) となる。
ここで,UM:システムの不稼働率。
(1) サブシステムの不稼働率が非常に小さな値(10-4)の場合,高次項は小さな値となるこ とから省略できる。通常,システムの信頼度は10-1オーダーであるが,不稼働率はサブシ ステムの数乗に比例するので,高次項を省略することができる。
3 2 3 1 3 2
1
)
( B B B B B B B
T = + ⋅ = +
} , max{
} , max{
3 2
3 1
U U U
U U U
b a
=
=
b a b a
b a
M
U U U U
U U
U
− +
=
−
−
−
=
) 1 )(
1 ( 1
・・・・・・・・・・・ (2-18)
・・・・・・・・・・・ (2-19)
・・・・・・・・・・・ (2-20)
・・・・・・・・・・・ (2-21)
(2) UaとUbが10-4の位ならUa×Ubは10-8の位となり,省略が可能である。
b a
M
U U
U ≅ +
2.5.3 システムの不稼働率モデルの構築例
ネットワーク接続の中長距離光ファイバ通信システム(図 2-8)を使って,A 地点と B 地点間の通信を想定したシステムの不稼働率モデルを構築する。
SubSys 2
SubSys 3
SubSys 10
SubSys 14 SubSys
12 SubSys
1
SubSys 4
SubSys 7
SubSys 9
SubSys 6 SubSys
11
SubSys 5 SubSys
8
SubSys 13
SubSys 15 Point A
Point B Point C
Point D
Fig.2-8 network connection of communication system
図2-8 ネットワーク接続の通信システム
・・・・・・・・・・・ (2-22)
T
OR gate
AND gate
Terminal event
Root event
Fig. 2-9 Fault Tree of system model B11
B13 B14
B4
B12
+
・
+
B1
+
B9
・
B5 B6 B7 B6 B8
+
+
・
+
・ B7
・
B3
B2
+
B9
B12
B13 B14
B11
+
・
・
B6 B8
+ +
B4 B5
B6
・
B8 B9
+
B12
B13 B14
B11
+ +
+
+
・ B10
図2-9 通信システムのFault Tree図