題 名
快適性を考慮した人体‐シート系の連成振動解析
指 導 教 授 吉 村 卓 也 教 授
平 成 2 5年 2月 1 5日 提 出
首都大学東京大学院
理 工 学 研 究 科 機 械 工 学 専 攻 学修番号 11883305
氏 名 菊 地 俊 之
学位論文要旨(修士(工学)) 学位論文要旨(修士(工学)学位論文要旨(修士(工学))) 学位論文要旨(修士(工学))
論文著者名 菊地 俊之 論文題名:快適性を考慮した人体‐シート系の連成振動解析
本文
現在一般の家庭で自動車が広く普及するなど,人間が機械に触れる機会が非 常に多くなっている.人間が機械から受ける影響のひとつとして振動がある.
振動は人間に対してさまざまな影響を与えるものであり,快適性への影響など が考慮されるようになっている.機械を安全に,快適に使用できる性能が求め られるようになってきている.
私たちにとって最も身近な機械の一つとして,自動車が挙げられる.自動車 の振動が乗員に与える影響として,疲労や腰痛,動揺病(乗り物酔い)等があ る.これらを明らかにするために,着座した状態での人体の振動暴露について,
多くの研究が行われてきた.
近年,自動車設計では.性能の面での高度化・多様化が進んでおり,乗り心 地という乗員に対する快適性の向上が重要な課題となっている.自動車は多く の部品によって構成されている.それゆえに,自動車ボディに振動として入力 する部位はパワートレインやタイヤ(サスペンション)など多数存在する.自 動車への入力を低減させることで,快適性の向上を図ることが多いが,最終的 に人体への振動伝達を低減する必要がある.シートに着座した人体の暴露振動 を考えると,人体は直接触れるものから入力を受けており,そのひとつが自動 車のシートである.自動車のシートについて,過去にはウレタンの特性,振動 入力による人体の応答などの研究が行われてきた.
シートの構造として大まかには,骨格部であるフレーム,フレームを覆うウ レタン,フレームとウレタンを覆うシート生地の 3 つで構成される.設計にお いて,快適性の問題は主にウレタンの性能で対処されてきたと言える.
しかし,自動車の燃費向上のニーズにより,シートについても,軽量化が求 められている.振動低減とは矛盾したこの要求に対して,FEM などで予測した シートの共振周波数を,自動車ボディの共振周波数と一致させないことで快適 性の向上を行ってきた.シート乗員を含めた動特性の予測も行われているが,
人体及びシートの振動特性が複雑であるために精度の良い予測は困難である.
人体とシート,それぞれの振動特性を把握することも大切であるが,着座状
となり振動特性が変化することが予想される.シート骨格部の振動特性が人体 の振動特性に影響を与えているならば,快適性にも影響を与えている可能性が ある.快適性の問題を考えるために,シート骨格部ならびにシートに着座した 人体の振動特性を把握しておく必要がある.
本研究では,人体‐シート系の連成振動特性を把握すると共に,シート単体 の振動特性との違いを明らかにする.また,人体‐シート系の振動特性として 特にシートの骨格部の振動と,シートの快適性の評価の関連について考察を行 う.
本論文は,以下に示す全6章から構成される.
第 1 章では自動車の快適性の向上という背景と,全身振動評価に関する先行 研究について述べ,研究目的を明らかにする.
第2章では人体‐シート系の振動特性について述べる.3人の被験者,3脚の シートという条件で垂直加振実験を行い,実験モード解析を行った結果につい て述べる.抽出した各振動モードの動きについて述べ,人体‐シート系の振動 特性を把握する.被験者違い,シート違いによる振動特性の違いについて述べ る.
第3章ではシート単体の振動特性について述べる.2脚のシートについて被験 者無し状態での加振実験を行い,実験モード解析を行った結果について述べる.
抽出したシート単体での各振動モードの動きについて述べ,シートの骨格部の 振動特性を把握する.
第 4 章では人体‐シート系とシート単体の振動特性の比較について述べる.
被験者の有無によるシート骨格部の振動特性の違いについて述べる.また,シ ート単体の加振実験結果において,ヘッドレストの有無による振動特性の違い について述べる.
第 5 章ではシート振動の官能評価について述べる.まず官能評価を行うため に行った予備実験について述べる.垂直加振実験での実験モード解析結果をも とに,被験者がシート振動の違いを体感出来る振動入力を検討した.予備実験 結果より検討した振動入力を用いて,6名の被験者,2脚のシートについて行っ た官能評価実験について述べる.実験モード解析によって得られた,人体‐シ ート系の連成振動特性と,不快感の評価との関連性について述べる.
最後に第 6 章では,本研究で得られた知見についてまとめる.さらに今後解 決すべき課題について述べる.
2012
年度 修士論文快適性を考慮した
人体‐シート系の連成振動解析
Vibration Analysis of Human -Seat Coupled System with Considering Comfort
首都大学東京大学院 理工学研究科 機械工学専攻 機械力学研究室 11883305 菊地俊之
指導教授 吉村 卓也 教授 玉置 元 助教
1-2 先行研究 ··· 2
1-3 目的 ··· 4
1-4 本論文の構成 ··· 5
第
2
章:人体‐シート系の振動特性 2-1 はじめに ··· 62-2 実験概要 ··· 6
2-2-1 実験について ··· 6
2-2-2 実験装置 ··· 6
2-2-3 シート ··· 6
2-2-4 実験条件 ··· 7
2-2-5 測定条件 ··· 11
2-2-6 解析条件 ··· 12
2-2-7 被験者データ ··· 12
2-3 実験結果の整理方法 ··· 13
2-3-1 偏分反復法 ··· 13
2-3-2 頭部・胴部の加速度変換方法 ··· 14
2-4 実験結果 ··· 16
2-4-1 実験結果(シートB) ··· 16
2-4-2 実験結果(シートA, C)··· 31
2-4-3 全被験者の実験結果 ··· 49
2-4-4 各シートのモードの比較 ··· 61
2-5 まとめ ··· 62
第
3
章:シート単体の振動特性 3-1 はじめに ··· 633-2 実験概要 ··· 63
3-2-1 実験について ··· 63
3-2-2 実験装置 ··· 63
3-2-3 シート ··· 63
3-2-4 実験条件 ··· 64
3-3-1 実験結果(シートB) ··· 67
3-3-2 実験結果(シートC) ··· 76
3-3-3 2脚のシートの実験結果の比較 ··· 86
3-4 まとめ ··· 88
第
4
章:振動特性の比較 4-1 はじめに ··· 894-2 比較の方法 ··· 89
4-3 被験者の有無による比較 ··· 89
4-3-1 各シートでの比較 ··· 89
4-3-2 被験者の有無比較のまとめ ··· 94
4-4ヘッドレストの有無による比較 ··· 95
4-4-1 実験概要 ··· 95
4-4-2 実験結果 ··· 96
4-4-3 ヘッドレスト有無の比較 ··· 108
4-5 各モードの寄与の大きさの比較 ··· 108
4-5-1 モードの寄与の大きさの表現方法 ··· 108
4-5-2 人体‐シート系での寄与の大きさ比較 ··· 109
4-5-3 シート単体での寄与の大きさ比較 ··· 114
4-6 まとめ ··· 117
第
5
章:シート振動の官能評価 5-1 はじめに ··· 1195-2 官能評価の予備実験概要 ··· 119
5-2-1 予備実験について ··· 119
5-2-2 実験装置 ··· 120
5-2-3 シート ··· 120
5-2-4 実験条件 ··· 121
5-2-5 被験者データ ··· 122
5-3 官能評価の予備実験結果 ··· 123
5-4 官能評価の予備実結果のまとめ ··· 125
5-5-3 シート ··· 126
5-5-4 実験条件 ··· 127
5-5-5 被験者データ ··· 128
5-5-6 官能評価方法 ··· 129
5-6 官能評価の本実験結果 ··· 130
5-6-1 狭帯域ごとの実験結果 ··· 130
5-6-2 被験者ごとの実験結果 ··· 136
5-7 官能評価の本実験結果のまとめ ··· 137
第
6
章:結論 6-1 結論 ··· 1386-2 今後の課題 ··· 140
参考文献 ··· 141
付録 A. ハンマリング実験 ··· 144
B. 各実験で測定したFRF ··· 158
第
1
章 諸論1
1-1
研究背景研究背景研究背景研究背景現在一般の家庭で自動車が広く普及するなど,人間が機械に触れる機会が非 常に多くなっている.人間が機械から受ける影響のひとつとして振動がある.
振動は人間に対してさまざまな影響を与えるものであり,快適性への影響など が考慮されるようになっている.機械を安全に,快適に使用できる性能が求め られるようになってきている.
私たちにとって最も身近な機械の一つとして,自動車が挙げられる.自動車 の振動が乗員に与える影響として,疲労や腰痛,動揺病(乗り物酔い)等があ
る[1],[2].これらを明らかにするために,着座した状態での人体の振動暴露につい
て,多くの研究が行われてきた.
近年,自動車設計において性能の面での高度化・多様化が進んでおり,乗り 心地という乗員に対する快適性の向上が重要な課題となっている.自動車は多 くの部品によって構成されている.それゆえに,自動車ボディに振動として入 力する部位はパワートレインやタイヤ(サスペンション)など多数存在する.
自動車への入力を低減させることで,快適性の向上を図ることが多いが,最終 的に人体への振動伝達を低減する必要がある.シートに着座した人体の暴露振 動を考えると,人体は直接触れるものから入力を受けており,そのひとつが自 動車のシートである.自動車のシートについて,過去にはウレタンの特性[3],振 動入力による人体の応答[4], [5]などの研究が行われてきた.
シートの構造として大まかには,骨格部であるフレーム,フレームを覆うウ レタン,フレームとウレタンを覆うシート生地の 3 つで構成される.設計にお いて,快適性の問題は主にウレタンの性能で対処されてきたと言える.
しかし,自動車の燃費向上のニーズにより,シートについても軽量化が求め られている.振動低減とは相反したこの要求に対して,FEM などで予測したシ ートの共振周波数を,自動車ボディの共振周波数と一致させない[6]ことで快適性 の向上を行ってきた.シート乗員を含めた動特性の予測[7],[8]や乗り心地評価[9]も 行われているが,人体及びシートの振動特性が複雑であるために精度の良い予 測は困難である.
人体とシート,それぞれの振動特性を把握することも大切であるが,着座状 態の振動特性の予測を可能とするためには,人体とシートの連成振動特性を考 慮する必要があると考えられる.シートに乗員が着座した状態で振動暴露され ることにより,人体‐シート間での連成振動が発生することで人体‐シート系 となり振動特性が変化することが予想される.シート骨格部の振動特性が人体 の振動特性に影響を与えているならば,快適性にも影響を与えている可能性が ある.快適性の問題を考えるために,シート骨格部ならびにシートに着座した
人体の振動特性を把握しておく必要があると言える.
1-2
先行研究先行研究先行研究先行研究自動車シートの快適性向上を目的として、これまで着座人体の全身振動応答 についてと,シートについての2方面から主に行われてきた.
着座人体の全身振動応答に関する研究として,人体の基本的な応答を調べる ために,剛体シート上に着座した状態での振動暴露実験の研究[4]が行われてきた.
剛体シート上で,鉛直(上下)方向や左右方向などの並進入力,またロールな どと言った回転入力や,異なる大きさの入力,直立や運転姿勢などの姿勢など といった様々な条件においての研究が行われてきた.そこからさらに,人体の 骨格と振動特性の関連についての研究[5], [10]もおこなわれてきた.これらの研究 によって,人体の振動特性が再現性や個体差などのばらつきをもち,伝達特性 が入力依存性であるという非線形性や,姿勢などの加振条件によって異なる応 答を示すということが明らかになっている.そしてISO2631-1[11]の人体全身振動 暴露評価の規格に基づいて人体の全身振動応答の研究が現在も行われている.
シートに関する研究について,安全性に関するものと快適性に関するものの2 つに分類ができる.
シートの安全性として、シートは人体が乗車時に着座するもので,衝突時に は乗員を保護する性能が要求される.衝突挙動についての研究として,乗員や 荷物が背面骨格部に衝突した場合の骨格部の応答についての研究[10]などがある.
シートの快適性向上のための実験的研究としては,剛体シートの加振実験で の人体応答を踏まえた上で,自動車シートでの人体の振動応答の研究が行われ てきた.そして,シートクッションの持つ振動特性と人体の振動特性の関係の 研究[3]が行われてきた.さらには,クッションと人体の境界に着目し,人体とシ ートの境界での振動と人体の応答との関係の研究[13]や,着座時のシート表面の 圧力分布の研究[14]が行われてきた.
3
Fig.1 Static interface pressure distribution measured on the rigid and soft seat surface by X. Wu, et al.
シートクッション,シートと人体の境界面,人体とそれぞれの振動特性が明 らかになり,それらを組み合わせ人体とシートの両方を考慮した振動特性につ いて考えられるようになった.
そして,快適なシートの性能を予測するために,実験結果を用いた理論的研 究として,モデル化やモデルを用いたシミュレーションが行われている.シー ト着座時の振動特性や乗り心地の予測を目的とした,様々な手法を用いたモデ ルの作成やシミュレーション[15], [16], [17]が多く行われている.
Fig.2 Analysis Model by OTA
シートの共振周波数について,フロアパネルとの共振周波数を重ならないよ うに設計は行われている.しかし,シートについて様々な研究が行われてきた 一方で,シート骨格部の振動特性に着目した研究は最近まで行われてこなかっ た.人体着座時のシート骨格部の周波数応答関数を測定した研究[18]も行われて いるが,人体着座時の人体とシート,両方の周波数応答関数の測定をしている 研究例はない.人体着座時の人体とシートの周波数応答関数を測定し,実験モ ード解析を行い,人体とシートにどのような振動が生じているのかを明らかに することが必要であると言える.
Fig.3 Measured intra-subject variability of the seat with human occupant lateral and fore-aft resonant frequency by Leon Lo, et al.
1-3
目的目的目的目的自動車の快適性向上のために,人体とシート,それぞれの振動特性だけでな く,人体がシートに着座した状態,つまり,人体‐シート系としてシート骨格 部ならびにシートに着座した人体の振動特性を把握することが必要である.
本研究では,人体‐シート系の連成振動特性を把握すると共に,シート単体 の振動特性との違いを明らかにする.また,人体‐シート系の振動特性として,
人体に影響を及ぼすシートの骨格部の振動と,シートの快適性の評価の関連に ついて考察を行う.
5
1-4
本論文の構成本論文の構成本論文の構成本論文の構成本論文は,以下に示す全6章から構成される.
第1章 緒論
自動車の快適性の向上という背景と,全身振動評価に関する先行研究につい て述べ,研究目的を明らかにする.
第2章 人体‐シート系の振動特性
人体‐シート系の振動特性について述べる.3人の被験者,3脚のシートとい う条件で垂直加振実験を行い,実験モード解析を行った結果について述べる.
抽出した各振動モードの動きについて述べ,人体‐シート系の振動特性を把握 する.被験者違い,シート違いによる振動特性の違いについて述べる.
第3章 シート単体の振動特性
シート単体の振動特性について述べる.2脚のシートについて被験者無し状態 での加振実験を行い,実験モード解析を行った結果について述べる.抽出した シート単体での各振動モードの動きについて述べ,シートの骨格部の振動特性 を把握する.
第4章 振動特性の比較
人体‐シート系とシート単体の振動特性の比較について述べる.被験者の有 無によるシート骨格部の振動特性の違いについて述べる.また,シート単体の 加振実験結果において,ヘッドレストの有無による振動特性の違いについて述 べる.
第5章 シート振動の官能評価
シート振動の官能評価について述べる.まず官能評価を行うために行った予 備実験について述べる.垂直加振実験での実験モード解析結果をもとに,被験 者がシート振動の違いを体感出来る振動入力を検討した.予備実験結果より検 討した振動入力を用いて,6名の被験者,2脚のシートについて行った官能評価 実験について述べる.実験モード解析によって得られた,人体‐シート系の連 成振動特性と,不快感の評価との関連性について述べる.
第6章 結論
本研究で得られた知見についてまとめる.さらに今後解決すべき課題について 述べる.
第
2
章人体‐シート系の振動特性
6
2-1
はじめにはじめにはじめにはじめにシートに人体が着座した状態でどのような振動が生じているかを明らかにす る為には,人体とシート両方の周波数応答関数(FRF)を測定する必要があると言 える.本章では,人体‐シート系の連成振動特性を把握することを目的として 行った,人体‐シート系の垂直加振実験について記す.
2-2
実験概要実験概要実験概要実験概要2-2-1 実験について実験について実験について実験について
本章では,人体‐シート連成系の振動特性の把握をするために,3脚のシート について,3人の被験者で垂直加振実験を行った.シートと被験者の人体部の加 速度を加速度計で,また人体‐シート間の境界面の加速度はシートパッドを用 いて,計44軸の加速度を計測した.
2-2-2 実験装置実験装置実験装置実験装置
本実験で使用した実験装置の一覧を表2.1に示す.
加振台は,首都大学東京が保有する1軸加振台(Z軸)を使用した.フィルタ で80Hz以上の周波数域をカットしたランダム波をLabViewで作成し,加振台に 入力した.
Table 2.1 Experimental Instrument
Instrument Manufacturer Model
Vibration Excitor EMIC F-200-BM/A
Function Generator NI LabView
FFT Analyzer NI PXI-1042
Analog Filter NF 3624
Accelerometer PCB M352 C65,C66
Tri-axial Accelerometer PCB 356 A32/NC,A24/NC Seat Pad Accelerometer PCB 356 B40/B41
2-2-3 シートシートシートシート
本実験で使用するシートは 3 種類である.その 3 種類のシートについての説 明を表2.2に示す.シートA とシートBの間で,設計コンセプトが変わってお り,物理的な繋がりはない.シート B は新しく設計されたシートであり,シー トCはシートBの改良版である.
Table 2.2 Experimental Seat Seat Characteristic
A Conventional Type
B New Type
C Improve Type of B
2-2-4 実験条件実験条件実験条件実験条件
振動加速度計測定位置
図2.1にISO2631で定義される座標軸を示す.これに基づき本実験での座標軸
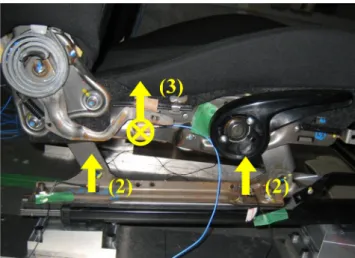
は,人体着座時の前方向をX,左方向をY,上方向を Zとする.表 2.3および図 2.2(a), (b), (c), (d)に人体‐シート,人体とシートの境界面での加速度計測定点を 示す.図2.2中には,表2.3と対応する番号と軸の向きを矢印で示す.
Figure 2.1 Coordinate of ISO2631 Table 2.3 Arrangement of Accelerometers
No. Sensor Location Number of Accelerometers Direction Part
1 Center of Shaking Table 1 z Floor
2 Rail 4 z
3 Seat Cushion Frame 2 y, z
4 Backrest Frame 4 x, y, z
5 Seat Pad on Seat Cushion Surface 1 x, y, z
6 Seat Pad on Backrest Surface 1 x, y, z
7 Head (Head Gear) 3 x, y, z
8 Shoulders 2 x, y, z
9 Breast 1 x, y, z
Seat
Boundary
Human Body
8
人体とシートの境界面の加速度を測定するためにシートパッドを用いた.シ ートパッドとは,円盤状のゴム板の中央部に 3 軸の加速度センサーが内蔵され ているものである.シートパッドを,シートから人体への入力となる座面部と 背面部にそれぞれ設置した.
Figure 2.2(a) Rail and Seat Cushion Surface
Figure 2.2(b) Backrest
Figure 2.2(c) Seat Pad on Seat Cushion Surface
Figure 2.2(d) Human Body
10
加振波形
入力する加振波形についての条件を表2.4に示す.加振台中央部に設置した1 軸加速度計で,入力波形の計測を行った.
Table 2.4 Input Waveform Frequency 1~80Hz
Form Random Wave Magnitude 0.3m/s2(r.m.s.)
本実験で入力した波形のパワースペクトルを図2.3に示す.
Figure 2.3 Input Power Spectrum
入力波形として,高周波域までパワースペクトルが平坦なものを使用した.
シートポジション
シートには,様々な位置調節機構が備わっているが,条件を同一にするため に,シートについてポジションを設定した.A, B, Cの3種類のシートについて 同様に以下の条件で実験を行った.
スライド(前後位置)について,加振台の中央部と被験者が乗った時の重心 位置を合わせるために,最後部より4ノッチ前方に出したところとした.
リクライニング(後傾)について,背もたれ(バックレスト)は,最も前傾 したところを基準点として,基準点から4ノッチ(基準点から+8°)倒したとこ ろで固定した.垂直軸に対して,背もたれは21°後傾している.
リフター(座面部の高さ)については,最上段の位置で固定した.
1 10 20 30 40 50 60 70 80
10-6 10-5 10-4 10-3
Frequency[Hz]
Power Spectrum[(m/s2 )2 ]
着座姿勢
人体の振動特性は,着座姿勢によって変化する.そのため,図2.4に示すよう に着座姿勢を統一した.
腰を深くシートに座り,臀部が簡単には動かないようにした.腰部の位置を 決めた後に,バックレストに自然に寄りかかり,背筋を伸ばして前方の目印 1 点を見る.足は大腿部の裏側が一様に座面と触れるように,足の固定治具の位 置を調整する.
各シートにつき 3 回測定し,姿勢が変化していないか再現性のチェックを行 った.指先の位置を確認するためにマーキングをし,足の位置の確認には,治 具の位置を基準に数値で計測した.頭部の位置の再現性として,図2.3に示す様 に,レーザー墨だし機で被験者の左耳たぶを照射し,毎回の測定で位置が変わ らないことを確認した.
頭部は,運転時にヘッドレストを用いない事を想定し,被験者が触れないよ うにヘッドレストを取り外した.
Figure 2.4 Posture of Subject
2-2-5 測定条件測定条件測定条件測定条件
本実験についての測定条件を表2.5に示す.
Table 2.5 Measurement Condition Samping Frequency 1kHz
Sampling Number 4096 Window Function Hanning
本実験では,約72秒の振動入力で暴露された時の,加速度計で計測された44 軸の加速度について,時系列データを計測した.
また,本実験では,1脚のシート,1人の被験者につき,3回の測定を行った.
12
2-2-6 解析条件解析条件解析条件解析条件
本実験での解析条件を表2.6に示す.
Table 2.6 Analysis Condition Analysis Frequency 1~80Hz Number of Averages 52
Overlap Ratio 66.6%
1回の測定につき 52回のスペクトル平均を行うことにより加速度伝達率を算 出する.この測定を 3 回行い,その平均値を伝達率とする.この処理を 3 脚の シート,3人の被験者について解析を行った.
2-2-7 被験者データ被験者データ被験者データ被験者データ
本実験における被験者3名の身長,体重を表2.7に示す.
Table 2.7 Subject Data Height [m] Weight [kg]
Sub.1 1.68 48.0
Sub.2 1.73 62.0
Sub.3 1.79 73.0
同一の身体的特徴ではなく,身長,体重に偏りの少ない3名を被験者とした.
標準体型より痩せ型である被験者1,標準的な体型の被験者2,標準体型より大 型の体格である被験者3とする.
2-3
実験結果の整理実験結果の整理実験結果の整理実験結果の整理方法方法方法方法2-3-1 偏分反復法偏分反復法偏分反復法偏分反復法
本研究では, Matlabで作成された機械力学研究室の内製プログラムを使用し て,モード特性の同定を行う.そこで,偏分反復法[19]の理論について説明する.
偏分反復法は,多自由度法の1つであり,計測された周波数応答関数(FRF)に 対して,その中に含まれる複数の固有モードを同時に同定するものである.
一般的に,実験によって得られる FRFは,未知のパラメータの数以上のデー タを含んでいる.もし,FRF の測定値が誤差を含まないならば,理論式の曲線 で完全に一致させることができるはずである.しかし,一般には測定データに は何らかの誤差が含まれているため,完全に一致させることはできない.その ため,同定を行う際には測定データと理論式によって構成される曲線の誤差が 最も小さくなるようにパラメータを決定する.このための最も一般的な方法が 最小二乗法[20]である.そして,この考えに基づいて周波数領域における最小二 乗法を適用したものが,偏分反復法である.
ある解析周波数内にある n 個のモードで表現される,加振点を i,応答点を j とした際のFRFは以下のように表現される.
( )
C Dj jV U j
jV U F
G X
n
r r dr
r r dr
r
r r i
j − +
+ + + −
− +
= +
=
∑
= 2
1 ( )
)
(ω σ ω ω σ ω ω ω
ここで,−C/ω2,Dは,剰余剛性と剰余質量を表し,解析の対象周波数域にあ る n 個のモードでは表現できない対象周波数域の外にあるモードの影響を考慮 するための項である.
同定が必要であるパラメータは,ωdr,σr,Ur,Vr,C,Dの 6 種類存在する.この うち,ωdr,σrは加振点や応答点によらないパラメータであり,全体項と呼ばれ ている.全体項は,式よりも明らかなように非線形項である.一方,Ur,Vr,C,D は加振点や応答点によって異なっているパラメータであり,局所項と呼ばれる.
局所項は,どれも線形項である.
パラメータの推定については,未知のパラメータが線形項のみであれば線形 の最小二乗法によって解くことができる.しかし,FRF には先に示したとおり 非線形である未知のパラメータが存在する.そこで,非線形項のパラメータ推 定のために,初期値として固有振動数とモード減衰比を与え,FRF を初期値の
(1)
14
モード特性のまわりでテーラー展開することで非線形項を線形化する.このよ うな手順を踏むことで推定したいモード特性の変更量を求め,実験計測により 得られた FRFとの誤差が小さくなるよう反復計算することでパラメータを推定 する方法が偏分反復法である.偏分反復法の特徴としては,反復計算によって モード特性を同定するために比較的精度が良いことが挙げられる.しかし,計 算のために非線形項の初期値が必要であり,何らかの方法によって初期値を決 定する方法を必要とする.そこで,本研究室のプログラムでは,モード指示関
数(MIF)を用いてモードの固有振動数を推定する方法を用いている.MIFについ
て,具体的には本実験の結果を実例として2-4に示す.
2-3-2 頭部・胴部の加速度変換方法頭部・胴部の加速度変換方法頭部・胴部の加速度変換方法頭部・胴部の加速度変換方法
本実験での解析において,頭部と胴部を剛体とみなして解析を行った.頭部 に取り付けた 3 つの 3 軸加速度計の測定値から頭部の重心の加速度,肩部に 2 つ,胸部に1 つ取り付けた計 3 つの 3軸加速度計の測定値からの胴部の重心の 加速度を以下の関係式を用いることにより算出する.
(1) 剛体上の任意の点間の変位関係式 重心と点iの変位関係式
剛体の重心を座標原点とする重心の変位と点iの変位の間には次式が成り立つ.
−
−
−
=
z y x G G G
i i
i i
i i
zi yi xi i i i
z y x
x y
x z
y z
z y x
θ θ θ θ
θ θ
1 1 1
0 1
0 1
0 1
これを次のように表す.
G i
i SU
U = ただし,
−
−
−
=
=
0 0 0 ,
i i
i i
i i
i i i
x y
x z
y z
I P O
P S I
さらにこのとき,
(2)
(3)
(4)
−
− =
I O
P
Si 1 I i
(2) 剛体運動の測定と重心への縮約
剛体上の n 点
(
n≥2)
で振動応答を測定したとすると,剛体の運動を決定でき る.測定ベクトルをV( )
n×1 とすれば,測定点の幾何学的関係によって,UG
R
V&&= &&
ただし,
−
−
−
−
−
−
≅
0 1
0 1
0 1
0 1
0 1
0 1
1 1
1 1
1 1
1 1 1
n n
n n
n n
n n n
x y
x z
y z
x y
x z
y z
z y x z y x
M M
&
&
&
&
&
&
M
&
&
&
&
&
&
従って,剛体運動を決定するには,上式に最小二乗法を適用することにより,
[
R R]
R VU&&G = T −1 T &&
これを簡単に次式で表す.
V R
U&&G = +&&
ここで,R+は行列Rの擬似逆行列を表し,
[ ]
RTR RTR+ = −1 である.
式(8)によって重心の運動が決定し,これにより剛体上の任意の点の運動を表す ことができる.例えば,点iの応答は,次式により表される.
G i
i SU
U&& = &&
(5)
(6)
(7)
(8)
(9)
(10)
(11)
16
2-4
実験結果実験結果実験結果実験結果2-4-1 実験結果実験結果実験結果実験結果(シートシートシートシートB)
これより,シートB に被験者 1 が着座した状態で加振実験を行った時の実験 結果を示す.
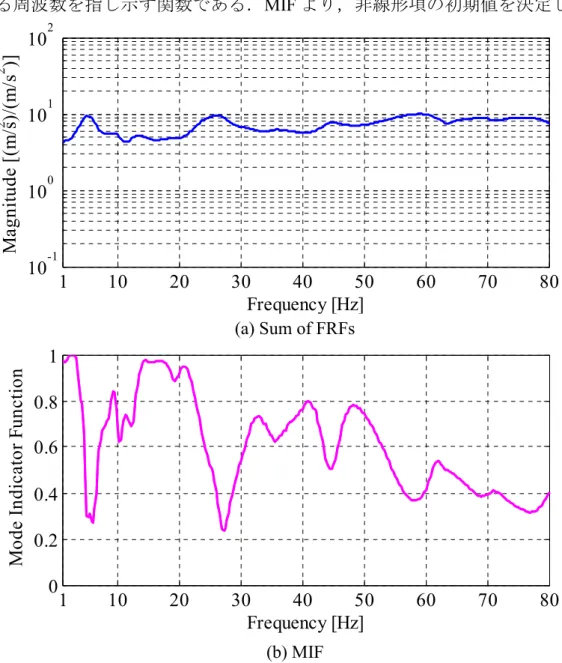
計測した加速度の時系列データを周波数領域に変換を行った.18 個の加速度 センサーで計測した44個のFRFの二乗和の平方根(Sum of FRFs)と,モード 指示関数(MIF)を図2.5に示す.図2.5の上部のグラフ(a) Sum of FRFsは,各 周波数における振幅の大きさを示し,下のグラフ(b) MIFは0≦MIF≦1の値をと り,固有振動数において位相が±π/2で極小値となることから固有モードの存在 する周波数を指し示す関数である.MIFより,非線形項の初期値を決定した.
(a) Sum of FRFs
(b) MIF
Figure 2.5 Subject 1-Seat B (Human-Seat System)
1 10 20 30 40 50 60 70 80
10-1 100 101 102
Frequency [Hz]
Magnitude [(m/s2 )/(m/s2 )]
1 10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8 1
Frequency [Hz]
Mode Indicator Function
計測した並進44軸の伝達率に対してカーブフィットを行うことにより,モー ド特性を抽出する.モード特性同定には多点偏分法を用い,得られた44軸の伝 達率を同時に参照してモード特性を抽出した.表2.8はカーブフィットによって 求められた固有振動数,モード減衰比を示す.12個の固有モードを抽出した.
Table 2.8 Modal Characteristics of Seat B (Human-Seat System)
fr: Damped Natural Frequency [Hz]
ζr: Modal Damping Ratio [%]
Order fr[Hz] ζr[%]
1st 4.02 15.4 2nd 5.18 11.5 3rd 6.01 15.2 4th 9.81 9.80 5th 12.2 11.1 6th 21.0 14.0 7th 25.8 8.63 8th 36.1 14.6 9th 44.8 5.96 10t h 58.3 9.05 11t h 67.3 6.47 12t h 77.3 7.99
加速度の計測を行った44点より抽出したモード特性が,シートと人体のどち らが支配的であるかを判別するために,シート部と人体部の FRFに分離して,
それぞれについてSum of FRFsとMIFを求めた.
シートは,レール部4 点,座面骨格部 2 点,背面骨格部 4点の計測点につい ての応答20軸を用いる.人体は,頭部3点,肩部2点,胸部1点の計測点につ いての18軸を用いる.
座面部と背面部のシートパッドについては,人体とシートの境界にあるので,
シートにも人体にも含まないものとした.
18
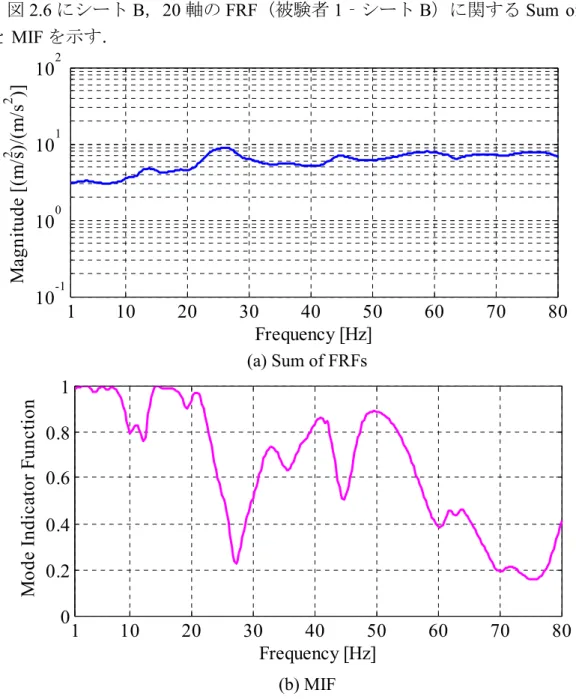
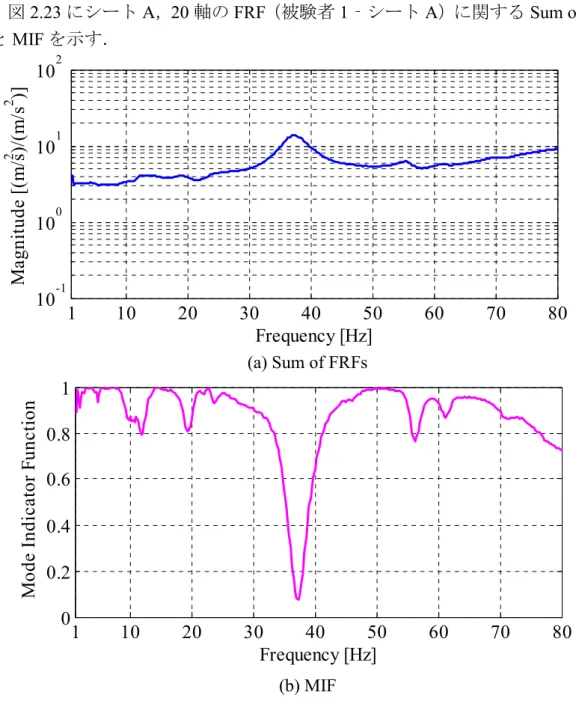
図2.6にシートB,20軸のFRF(被験者1‐シートB)に関するSum of FRFs とMIFを示す.
(a) Sum of FRFs
(b) MIF
Figure 2.6 Seat B (Human-Seat System)
図 2.6(a)より,10Hz からシートの振幅が大きくなっていき,それ以降も振幅
が大きい状態を維持している.特にシートBでは,26Hz付近で振幅が最大値と なっている.また,図2.6(b)より,シートの振幅が大きくなるところで,MIFの 値が極小値を示している.
1 10 20 30 40 50 60 70 80
10-1 100 101 102
Frequency [Hz]
Magnitude [(m/s2 )/(m/s2 )]
1 10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8 1
Frequency [Hz]
Mode Indicator Function
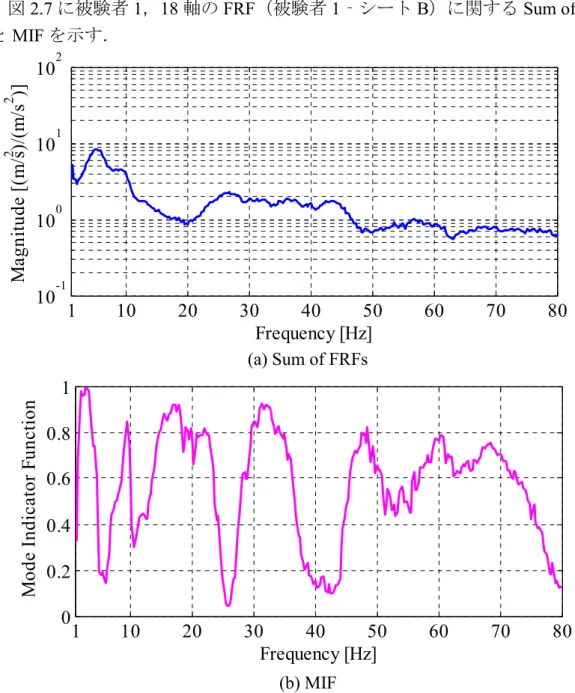
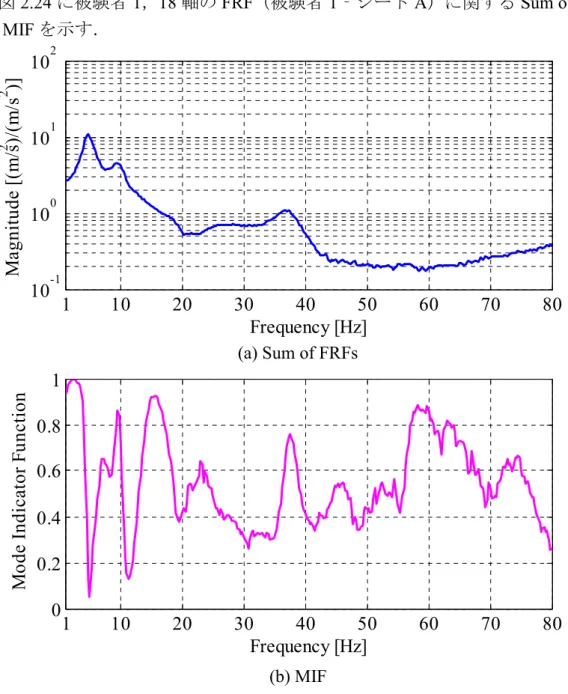
図2.7に被験者1,18軸のFRF(被験者1‐シートB)に関するSum of FRFs とMIFを示す.
(a) Sum of FRFs
(b) MIF
Figure 2.7 Subject 1 (Human-Seat System)
図2.7(a)より,人体は主に 10Hz以下の周波数域において,振幅が大きくなっ
ており,人体主体の振動になっていることが分かる.20~50Hz の周波数域にお いても,人体の振幅が大きくなるということが分かる.
1 10 20 30 40 50 60 70 80
10-1 100 101 102
Frequency [Hz]
Magnitude [(m/s2 )/(m/s2 )]
1 10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8 1
Frequency [Hz]
Mode Indicator Function
20
シートB,被験者1に関するSum of FRFsとして,人体‐シート(全測定点の 44軸),シート(20軸)と人体(18軸)を比較したものを図2.8に示す.
Figure 2.8 Comparisons of FRFs (Seat B)
図 2.8 により,低周波域(~10Hz)では人体が主体のモードであり,10~50Hz 付 近では人体-シート連成のモード,それより高周波域になると人体の応答が見 られなくなることから,シート主体のモードとなることがわかる.
1 10 20 30 40 50 60 70 80
10-1 100 101 102
Frequency[Hz]
Magnitude [(m/s2 )/(m/s2 )]
Human-Seat Seat
Human
ここでは,抽出したモードがどのような動きをしているかを示す.これから 示すモード形状の表示点について,説明を図2.9に示す.
(a) Top View (b) Front View (c) Side View
(2): Rail (6): Seat Pad on Backrest (3): Seat Cushion Frame (7): Head
(4): Backrest Frame (8) and (9): Trunk (Chest) (5): Seat Pad of Seating Face
Figure 2.9 Display of Format of Mode Shape
モード形状の表示点として,人体部を表示する為に,頭部と胴部に関して,
FRFの重心への縮約と,任意の点間への変換を用いることで,図2.9に示す表示 点でモードの動きを表現する.
(7)
(8) & (9) (6) (4)
(5)
(2) (2)
(3) (7)
(8) & (9) (6) (4)
(5) (3) (3)
(2) (2)
(4) (7)
(8) and (9) (2)
(2) (2)
(2)
22
1次モード
1次モードの動きを図2.10に示す.
Figure 2.10 1st Mode Shape
1 次モードは,f=4.02[Hz]で,背面骨格部が前後方向に動き,それと逆位相で 人体も動く.人体の応答として,頭部はピッチ方向に回転をしており,胴部の 前後方向の動きと少し位相差が生じている.このモードは,シートよりも人体 の振動が支配的であり,人体が主体となるモードであった.
2次モード
2次モードの動きを図2.11に示す.
Figure 2.11 2nd Mode Shape
2 次モードは,f=5.18[Hz]で,人体の上下方向の共振である.座面部のシー トパッドは,人体の上下方向と同位相で動いている.頭部は,胴部の上下方向 の動きと同位相でピッチ方向に回転している.2次のモードも人体の振動が支配 的な,人体主体のモードである.
3次モード
3次モードの動きを図2.12に示す.
Figure 2.12 3rd Mode Shape
3次モードは,f=6.01[Hz]で,人体の上下方向のモードである.3次モードでの 頭部の応答は回転ではなく,胴部と同位相で上下に動く.胴部は背面骨格部と 逆位相で動き,これにより胴部には少し前後方向の動きが見られる.3次のモー ドも人体の振動が支配的な,人体主体のモードである.
4次モード
4次モードの動きを図2.13に示す.
Figure 2.13 4th Mode Shape
4次モードは, f=9.81[Hz]で,人体の前後方向のモードである.
胴部の前後方向の動きに対して,頭部は90°の位相差でピッチ方向の回転の動 きをする.またこの時,胴部は背面骨格部と逆位相で動いている.背面部のシ ートパッドは背面骨格部と同位相で動いている.この 4 次モードも,人体の振 動が支配的な,人体が主体のモードである.
24
5次モード
5次モードの動きを図2.14に示す.
Figure 2.14 5th Mode Shape
5 次モードは,f=12.2[Hz]で,人体-シート連成のモードである.背面骨格部 が前後方向に伝達率が 1.5の大きさで動いている. 背面骨格部は,胴部の前後 方向に対して,90°位相が遅れて前後に動く.頭部も同様に胴部の前後方向に対 して90°位相が遅れてピッチ方向に回転する.
6次モード
6次モードの動きを図2.15に示す.
Figure 2.15 6th Mode Shape
6次モードは,f=21.0[Hz]で,人体-シート連成のモードである.座面骨格部 より上の部分全体が同位相で左右に動いている.背面部のシートパッドも背面 骨格部と同位相で左右に動いている.人体について,頭部と胴部は同位相で左 右に動いていて,胴部は座面骨格部に対して,位相差180°で動いている.
7次モード
7次モードの動きを図2.16に示す.
Figure 2.16 7th Mode Shape
7 次モードは,f=25.8[Hz]で,人体-シート連成のモードである.このモード は背面骨格部の前後方向共振のモードで,人体‐シート系の特徴的なモードで ある.シート骨格の構造として,背面部の骨格が前後方向に共振するモードが 励起されることは予想された.また,このモードはその他のモードに比べて振 幅が大きくなると予想されたが,実際に背面骨格部の右上部(測定点(4)b)での伝 達率が5に達していた.
座面骨格部が少し左右に振動しており,背面骨格部は前後に振動しながら,
左右にも振動していることがわかる.胴部は背面骨格部と同位相で動いており,
背面骨格部が斜め前方に動くのに押されるように,右肩部が大きく動く.頭部 はほとんど動いていない.
背面部と座面部のシートパッドは,ぞれぞれの骨格部と同位相で動く.
26
8次モード
8次モードの動きを図2.17に示す.
Figure 2.17 8th Mode Shape
8 次モードは,f=36.1[Hz]で,人体-シート連成のモードである.このモード は,背面骨格部が主にロール方向に動くモードである.これは,最も入力に近 いレール部 4 点の中で,右後ろ部が大きく振動して,それが座面骨格部と背面 骨格部に伝わり,ロール方向に動くモードになっている.
上部から見た図より,背面骨格部の左上部(測定点(4)a)での前後方向の振幅 が右上部(測定点(4)b)よりも大きくなっている.これは,背面骨格部の右下部
(測定点(4)d)が前後方向に動いており,背面骨格部がフレームの形状を保持し ながら,回転をするように動いている.
人体は,座面骨格部の左右方向の動きにより胸部がロール方向に動き,背面 骨格部の回転の動きにより肩部はヨー方向に動く.
9次モード
9次モードの動きを図2.18に示す.
Figure 2.18 9th Mode Shape
9 次モードは,f=44.8[Hz]であり,人体‐シート連成のモードである.このモ ードは背面骨格部のねじれモードである.背面骨格部は,ねじれることでヨー 方向の動きをする.
正面から見ると,座面骨格部が左右方向に動き,この時,背面骨格部は座面 骨格部とは逆位相で左右方向に動く.この時,背面骨格部の下部2点(測定点(4)c, d)は座面骨格部と同位相で動いているが,上部2点(測定点(4)a, b)は座面骨 格部とは逆位相で動く.背面骨格部は形状を保持しながら振動している.
上面から見ると,背面骨格部の左側2点(測定点(4)a, c)と右側2点(測定点
(4)b, d)が逆位相で前後方向に動いている.
座面部のシートパッドは座面骨格部と同位相で左右方向に動く.これに伴い,
人体の胴部は,座面骨格部の動きから位相90°遅れて,ロール方向に動く.
28
10次モード
10次モードの動きを図2.19に示す.
Figure 2.19 10th Mode Shape
10次モードは,f=58.3[Hz]で,シート主体のモードである.シート骨格部の動 きとしては,背面骨格部が前後方向に動き,またレール部が左側を軸に上下に 回転するように動いている.人体の応答はほぼ見られず,座面部のシートパッ ドは座面骨格部と同位相で左右方向に動き,背面部のシートパッドはレール部 と同位相で上下方向に動いている.
11次モード
11次モードの動きを図2.20に示す.
Figure 2.20 11th Mode Shape
11次モードはf=67.3[Hz]で,シート主体のモードである.シート骨格部の動き として,背面骨格部が前後方向に大きく動いている.背面骨格部の上部2点(測
定点(4)a, b)と下部(測定点(4)c, d)で前後方向に位相差が180°で動く.レール
部から座面骨格部へ伝わり,座面骨格部から背面骨格部へと位相差をもちなが ら振動が伝わっているモードである.
この時,人体の応答はほとんど見られないが,背面部のシートパッドは座面 骨格部の前後方向の動きにより大きく上下方向に動いている.
30
12次モード
12次モードの動きを図2.21に示す.
Figure 2.21 12th Mode Shape
12次モードは,f=77.3[Hz]で,シート主体のモードである.このモードでの骨 格部の動きとして,レール部が左側を軸に回転するように動いていて,それが 座面骨格部に伝わり,背面骨格部の下部2点(測定点(4)c, d)が逆位相で動く.
背面骨格部はヨー方向に動く.背面部のシートパッドは背面骨格部と逆位相で 斜め上下方向に動く.このとき人体はほとんど応答が見られない.
2-4-2 実験結果実験結果実験結果実験結果(シートシートシートシートA,,,,C)
本実験では合計 3 種類のシートで実験を行ったが,これまで 1 種類のシート についての解析結果を示した.そこで,残りの 2 つのシートについての解析結 果を示す.同様に被験者1について述べる.
シートA
被験者1,シートAでの加振実験におけるモード解析結果を表2.9に示す.10 個の固有モードを抽出した.
Table 2.9 Modal Characteristics of Seat A (Human-Seat System)
fr: Damped Natural Frequency [Hz]
ζr: Modal Damping Ratio [%]
Order fr[Hz] ζr[%]
1st 3.72 16.2 2nd 4.78 13.5 3rd 8.79 19.7 4th 10.4 16.9 5th 12.1 13.9 6th 20.1 9.37 7th 22.5 9.00 8th 37.6 6.17 9th 55.6 4.52 10th 61.1 4.94
被験者1,シートAでの解析結果として,約60Hzより高周波域ではモードが 抽出されなかった.
32
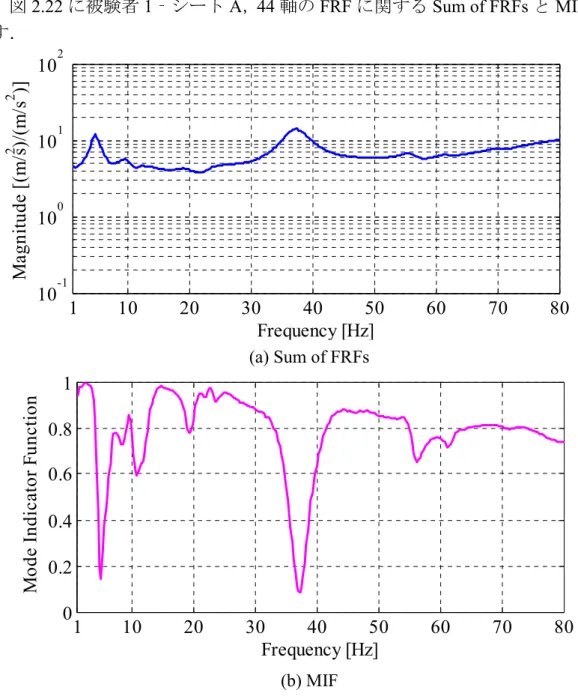
図2.22に被験者1‐シートA,44軸のFRFに関するSum of FRFsとMIFを示 す.
(a) Sum of FRFs
(b) MIF
Figure 2.22 Subject 1-Seat A (Human-Seat System)
図2.22(a)よりシートAでは,Sum of FRFsの値が37Hz付近で最大値となって いることが分かる.
シートBの時と同様に,シート部に関するFRFと,人体に関するFRFに分離 をする.
1 10 20 30 40 50 60 70 80
10-1 100 101 102
Frequency [Hz]
Magnitude [(m/s2 )/(m/s2 )]
1 10 20 30 40 50 60 70 80
0 0.2 0.4 0.6 0.8 1
Frequency [Hz]
Mode Indicator Function