九州大学学術情報リポジトリ
Kyushu University Institutional Repository
周辺付加物による垂直軸型風車の発電性能向上に関 する研究
渡邉, 康一
https://doi.org/10.15017/1807033
出版情報:Kyushu University, 2016, 博士(工学), 課程博士 バージョン:
権利関係:Fulltext available.
周辺付加物による垂直軸型風車の 発電性能向上に関する研究
平成 29 年 1 月
渡邉 康一
目次
記号一覧
第1章 序論 1
1.1 風力発電の現状………. 1
1.1.1 世界の電力消費の動向……… 1
1.1.2 地球温暖化問題と再生可能エネルギー……… 2
1.1.3 風力発電の起源と現在の風力発電の動向……… 3
1.2 本研究に関わる従来の研究成果………. 5
1.2.1 風を集める研究と風レンズ……… 3
1.2.2 レンズ風車の開発………. 7
1.2.3 垂直軸型風車(VAWT)に関する従来研究………. 8
1.2.4 垂直軸型風車(VAWT)の特徴……… 9
1.2.5 周辺付加物の垂直軸型風車(VAWT)への適用に関する研究……… 10
1.3 研究目的……… 11
1.4 研究方法………. 11
1.4.1 研究のアプローチ……… 11
1.4.2 論文構成……… 12
第2章 風洞実験法 13
2.1 風洞実験法……… 13
2.1.1 大型境界層風洞……… 13
2.1.2 実験に使用した直線翼固定ピッチ式垂直軸型風車………. 13
2.1.3 周辺付加物の形状……… 14
2.1.3.1 風レンズ型の周辺付加物……… 14
2.1.3.2 平板形状などを組み合わせた周辺付加物……… 16
2.1.4 出力性能実験法……… 16
2.1.5 流速測定実験法……… 18
2.1.6 流れ場の可視化実験法……… 19
第3章 数値計算法 21
3.1 数値計算法の概要……… 21
3.1.1 数値計算法の選定……… 21
3.1.2 部分段階法……… 23
3.1.3 対流項の離散化方法……… 24
3.1.4 物体の表現方法……… 24
3.1.5 計算格子……… 26
3.2 風洞実験と数値計算の結果の比較検証……… 28
3.2.1 数値計算から得られた流速分布の実験結果との比較……… 29
3.2.2 数値計算から得られた流れ場の可視化実験結果との比較………. 32
第4章 周辺付加物を用いたVAWTに関する 風洞実験と CFD解析 35
4.1 VAWT のトルクの発生メカニズムの調査……… 35
4.1.1 VAWT 周りの時間平均速度分布……… 35
4.1.1.1 流れの非対称性……… 35
4.1.1.2 主流方向速度の大幅な減速……… 38
4.1.2 ブレードの回転に伴う流れ場の周期的な変動……… 39
4.1.3 ブレードにトルクが発生するメカニズム……… 41
4.2 風レンズ(つば付きベンチュリ形状の付加物)の適用……… 50
4.2.1 平面型風レンズの適用………. 50
4.2.1.1 平面型風レンズがある場合の VAWT 周りの流れ場……… 50
4.2.1.2 つばの幅の効果……… 55
4.2.1.3 ディフューザ開き角の効果……… 55
4.2.1.4 ディフューザ長さの効果……… 57
4.2.1.5 インレットの効果……… 58
4.2.1.6 風レンズと風車の相対位置……… 60
4.2.2 曲面型風レンズの適用……… 63
4.3 風車形状を変化させた場合の風レンズの効果……… 66
4.3.3 風車形状を変化させた場合の出力変化……… 66
4.3.3.1 翼枚数を変化させた場合……… 66
4.3.3.2 翼厚を変化させた場合……… 66
4.3.3.3 翼のコード長を変化させた場合……… 67
4.3.3.4 ソリディティが同じで翼枚数が異なる場合……… 68
4.3.4 出力性能のレイノルズ数依存性……… 69
4.4 垂直軸型風車の性能をさらに向上させる周辺付加物形状の探究……… 70
4.4.1 対称型ベンチュリ形状付加物による出力増加特性……… 70
4.4.2 対称型平板形状付加物による出力増加特性……… 71
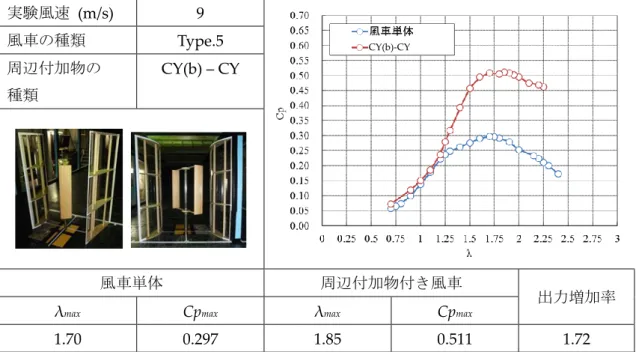
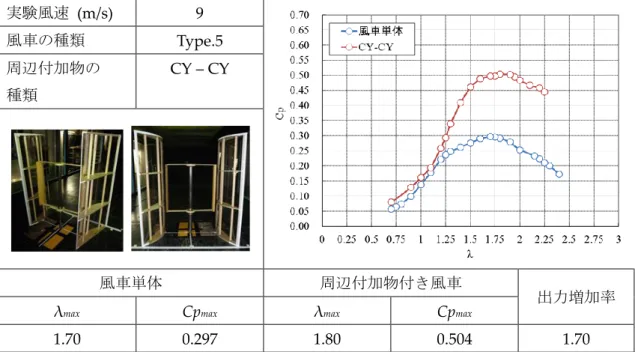
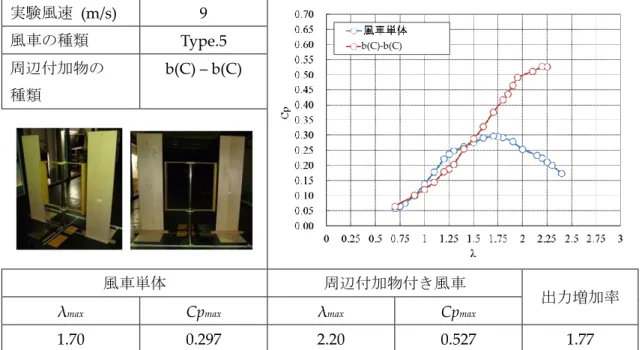
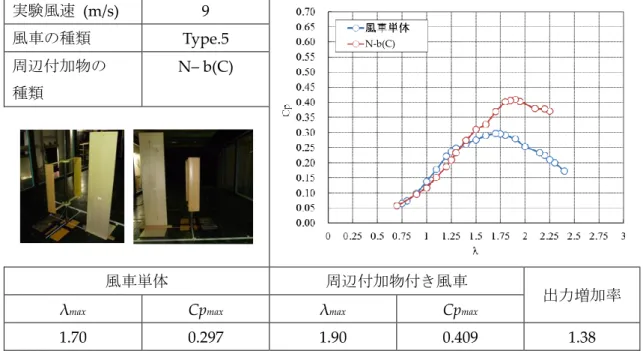
4.4.3 非対称形状付加物による出力増加特性………. 73
4.4.4 平板形状付加物による集風加速効果……… 75
4.4.5 平板形状付加物によって生成される低速域の効果……… 76
第5章 結論 79
謝辞 81
参考文献 82
Appendix 風洞実験結果データ集 85
A.1 出力性能実験結果……… 89
A.1.1 風車単体の出力性能実験結果……… 89
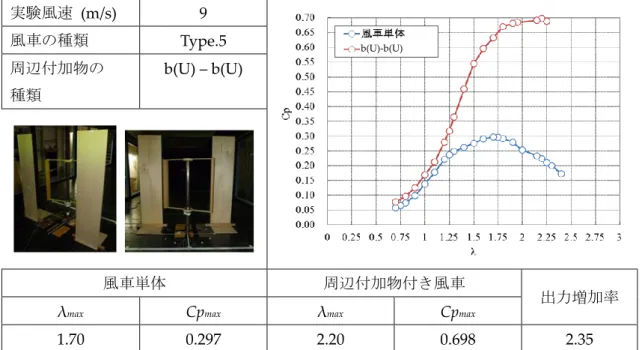
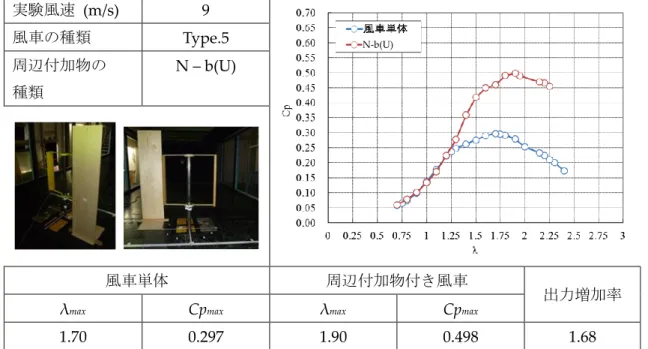
A.1.2 風レンズ付き風車の出力性能実験結果……… 95
A.1.3 平板形状などを組み合わせた周辺付加物付き風車の出力性能実験結果……… 120
A.2 流速測定実験結果……… 134
A.3 流れ場の可視化実験結果……… 136
A.3.1 風車単体周りの流れ場の可視化実験結果……… 136
A.3.2 風レンズ付き風車周りの流れ場の可視化実験結果……… 146
A.3.3 平板形状などを組み合わせた周辺付加物付き風車周りの流れ場の 可視化実験結果………. 154
記号一覧
U∞ [m/s] 上流側風速
ρ [kg/m3] 空気密度
Re [1] レイノルズ数 ν [m2/s] 動粘性係数 c [m] ブレードコード長 l [m] ブレードスパン方向長さ
r [m] 風車半径
Dwt [m] 風車直径(=2r)
Tw [m] 風洞測定部幅 n [1] 風車回転数
ω [rad/s] 回転角速度(=2πn)
[1] 風車回転周速比(=r U)
θ [deg] ブレード回転角
D [m] ディフューザ入口幅(=スロート幅)
φ [deg] ディフューザ開き角
Ldif [m] ディフューザ長さ Lin [m] インレット長さ
h [m] つばの幅
W [m] 風レンズ構造体高さ方向幅 A [m2] 風車投影面積(=Dwt×l)
Abrim [m2] 構造体投影面積(=(D+2Ldif×sinφ+2h)W )
Q [N・m] 風車発生トルク
P [W] 風車発生パワー(=Qω) CT [1] トルク係数(=Q 0.5U2rA) Cp [1] 出力係数(=P 0.5U3 A) Cpmax [1] 風車最大出力係数
1
第1章 序論
本研究は,風を集めて増速させる構造体を垂直軸型風車の周りに設置し,その発電性能 を向上させることを目的として行った.従来,水平軸型風車に適用され,効果を発揮して きた集風構造体“風レンズ”の,垂直軸型風車への応用である.研究成果について述べる に先立ち,本章では風力発電の現状と,本研究に関わる従来の研究成果についてまとめる.
1.1 風力発電の現状
1.1.1 世界の電力消費の動向
電力は,生活水準の向上や高度情報化社会の形成のために,今や人類にとって必要不可 欠なエネルギーである.世界の電力消費量はこの40年間,継続的に増加している(図1.1(a) 参照)。地域別に見ると,先進国の多い北米・西欧地域,及びロシアやその他旧ソ連邦諸国・
東欧地域では大きな増加がみられないのに対し,開発途上国を多く抱えているアジア地域 において大きく消費量が増加し,昨今の世界の電力消費量増加の主要因となった。アジア 地域は,1994年以降,電力消費量で西欧地域を上回るようになり,2004年以降は北米をも 上回るようになった[1].この30年間はいわば,アジアの電化が進んだ時代だったといえる.
(a) (b)
図1.1 (a)世界の電力消費量の推移と(b)世界の未電化人口(地域別:2013年)
一方で,全世界においては 12 億もの人々が未だ電力供給を受けていない.この人数は,
日本の人口の10 倍に相当する[2].それらの人々の多くは,途上国の南アジアやサブサハラ アフリカに在住している(図 1.1(b)参照)。これらの人々が住む国々にとって,未電化率の 改善は大きな政策課題の一つとなっており,その実現のためには,電力供給インフラ(発 電、送配電、再エネによる分散型電源)に対する大規模な投資が必要とされている[1]。しか
2
しながら,近い将来,アジアの残る地域やアフリカへ電化の動きが進んでいく可能性は高 く,電力には今後まだまだ大きな需要が生まれることが予想される.
1.1.2 地球温暖化問題と再生可能エネルギー
将来,世界的に電力需要の増加が予想されることを前項で述べたが,次に現在の電力の 供給方法,発電方式に目を向けてみる.世界の発電電力量構成を図1.2に示す[3].2007年の 時点で,未だ発電量全体の61.8%は石炭,石油,天然ガスの化石燃料で賄われていることが 分かる.1988 年に NASA の J.ハンセンが地球温暖化の可能性を示唆してからまもなく 30 年が経過するが,残念なことに現在でも最も普及している発電の方法は,炭素含有量が他 の燃料と比べて高い,石炭による火力発電である.石炭は広い地域に豊富に分布し,価格 安定性,及び供給安定性に優れることが普及の背景にあるといわれている[3].しかしながら,
この化石燃料の使用は地球温暖化を着実に進行させている.図1.3に世界の,ここ 30年間 の燃料燃焼による二酸化炭素排出量と,平均気温上昇の推移を示す[2,4].二酸化炭素排出量 の増加に伴い,世界の平均気温も上昇している様子が見て取れる.地球温暖化による影響 については,ここで詳細を記載しないが,気象の変化に伴う海面の上昇,内陸の砂漠化,
自然災害の増加,感染症や病害虫の増加などが懸念されている[5].この地球温暖化に歯止め をかけるためには,二酸化炭素排出量の低減,すなわち化石燃料の使用量の低減が必要不 可欠であるが,一方で増加する電力需要も満たす必要がある.そこで注目されているのが,
太陽光や太陽熱,水力,風力,バイオマス,地熱などの再生可能エネルギーによる発電で
ある.図1.2(b)をみると,現状では再生可能エネルギーは水力を含めても,全体の18%に過
ぎない.しかしながら再生可能エネルギーはその名の通り,一度利用しても比較的短期間 に再生が可能で,資源が枯渇しない.また,環境に有害な排出物もないことから,化石燃 料にかわる将来のエネルギー源としてさらなる普及が望まれている.前述したように風力 エネルギーも,普及が望まれている再生可能エネルギーのうちの1つである.
(a) (b)
図1.2 世界の発電電力量構成
3
図1.3 世界の燃料燃焼による二酸化炭素排出量と平均気温上昇の推移
1.1.3 風力発電の起源と現在の風力発電の動向
風車の起源は紀元前まで遡る記録があるそうだが[6],風力による発電,それも翼に発生す る揚力を利用した発電に初めて成功したのはデンマークのP. ラクールだといわれており,
彼が風力発電に成功したのは125年前の1891年のことである[7].その後100年以上も発電 量がごくわずかであった風力発電は,ここ 20 年間で急激な導入拡大のフェーズに入った.
風力発電技術の進歩に加えて,地球環境悪化防止のための脱火力発電、及び放射性物質の リスク回避のための脱原子力発電の動きを追い風として,2015 年に世界の風力発電累積導 入量は1995年の70倍以上の約433GWまで増加した(図1.5参照)[8].同時に,発電コス ト低減のための努力が続けられ,世界では今や他の発電方式に対して競争力を持つコスト 水準となった(図1.5,及び表1.1参照)[8,9].
(a) (b)
図1.4 P.ラクール[7]と揚力型風車発祥の地デンマークMiddelgrundenの洋上風車
4
図1.5 世界の風力発電累積導入量と発電コストの推移
表1.1 発電方式別の発電コスト
風車自体に目を向けると,図1.5に示すように,徐々に大型化する傾向にある.大型化を 可能にしたのは,もちろん風車の設計・製造技術の進歩であるが,風車の大型化を促す理 由は別にある.1つ目の理由は,風車1機当たりの発電量の,効率的な増加の実現である.
ある面積Aを風速Vの風が通過する際の風力エネルギーPは,(1.1)式で表現される.
𝑃 =12𝜌𝐴𝑉3 (1.1) ここでρは空気の密度である.(1.1)式から分かるように,風車が得られるエネルギーは受風 面積 A に比例するため,水平軸型風車であればロータ径を大きくすれば,その拡大率の 2 乗に比例した発電量が得られ,効率的に風車 1 機当たりの発電量を増加させることができ る.1機当たりの発電量が増加すると,設備利用率が向上し,同じ発電量を得るための機数 が少なくてすむ分,維持コスト,ひいては発電コストが低減できる点が好ましい.2つ目の 理由は,上空風の利用による,風力発電適地の拡大である.地表近くの風は地面とのシア
5
や,地形・建物などの後流の影響によって,上空の風よりも減速している.しかしながら,
地表近くでは風が弱い地域であっても,風車を大型化してハブの設置位置を高くし,減速 していない上空風を利用することができれば,効率的な発電をすることができる.すなわ ち,風力発電の適地を拡大することができる.図1.6は,米国においてハブ高さを高くした 場合の適地拡大を予想した結果である[10].この報告によると,2013年の80m級のハブ高さ から,近い将来140m級のハブ高さに風車を進歩させることによって,設備利用率30%を達 成する地域を1.67 倍に拡大できると予想している.以上の理由により,今後も風力発電に おいては風車の大型化の動きがしばらくは続いていくことが予想される.
(a) (b)
図1.6 ハブ高さの上昇による設備利用率30%達成見込地域の拡大予想
1.2 本研究に関わる従来の研究成果
1.2.1 風を集める研究と風レンズ
前節では式(1.1)を用いて,風力エネルギーPがロータ径の2乗に比例して大きくなること を述べたが,同時にこの式は風速Vが増加した場合,PがV の増加率の3乗に比例して大 きくなることを示している.すなわち,風車にあたる風速を高めることができれば,風車 を大型化するよりも効果的に発電量を高められることが分かる.加えて,風速を高めるこ とで風の弱い地域にも発電適地を拡大することができる.したがって,風車にあたる風を 集中させ,増速する技術は大型化と同様,あるいはそれ以上に風力発電にとって有用であ ると考えられる.
しかしながら,20世紀までは積極的に風のエネルギーを集める研究はいくつかの報告[13-18]
に見られるだけで少なかった.唯一集中的に行われていた研究は Gilbert, Foreman ら[13,14]
によるディフューザタイプの集風構造体の検討である.彼らは研究で,大きな拡大角を有 するディフューザに対し,その内壁に沿う流れを複数のスロットからの隙間流れにより境 界層制御し,流れの剥離による損失を防いでディフューザ内部の流量を増加させ,風エネ
6
ルギーの増加を図った(図 1.7(b)参照).他にもいくつかのアイディアがあったが,実用化 には至らなかった[18].
(a) (b)
図1.7 Gilbertらによるディフューザ付き風車のコンセプト
21 世紀に入ると,大屋ら[19,20]によって集風効果のある風車周辺構造物の価値は再発見さ れ,さらにその形状に工夫が施された.大屋らはディフューザの入口部にインレット,出 口部にリング状のつば(渦生成板)を取付けた“つば付きベンチュリ形状”の集風構造体 を風車の周りに設置し,発電量を風車のみの場合と比較して最大 5 倍程度まで向上させる ことに成功した[21].この集風構造体は,光学レンズが光を集めるように風を集めることが できるため,“風レンズ”と呼ばれている.風レンズは,風の2つの流体力学的性質を応用 している.1つ目は,ディフューザ形状の構造物を流れの中においたとき,ディフューザの 入口部で風が集められ増速する性質である.2つ目は,平板を流れの中に,流れを遮る向き でおいたとき,その背後に渦が形成されて低圧となり,その低圧部に向けて周囲の風が流 れ込む性質である.風レンズを利用した風車である“レンズ風車”はこの 2 つの性質を組 み合わせて利用し,風車を設置するベンチュリのスロート部で高い集風加速効果を得てい
る[22-24].図1.8にレンズ風車のメカニズムを図示する.
(a) (b)
図1.8 ディフューザの集風加速効果の可視化実験結果[20]とレンズ風車のメカニズム
7 1.2.2 レンズ風車の開発
開発当初,レンズ風車は風車に対して大きな集風構造体を有していたが(図1.9(a)参照), その後の研究[20]で形状が洗練され,コンパクトな形状でも高い性能が得られるようになっ た.このコンパクト化により風車への設置が容易になり,レンズ風車は実用化された[25]. 現在,最も大きなもので直径12.8mの風車への設置実績がある(図1.9(b)参照).
(a) (b) (c)
図1.9 レンズ風車: (a) 500Wプロトタイプ機; (b) 100kWコンパクト機; (c) 10kWマルチ ローター機
コンパクトタイプのレンズ風車は,通常の風車のおよそ 2.5倍の性能を持つ.2011 年に 3kW コンパクト機を用いて,博多湾において浮体型複合洋上発電の実証試験が実施された が(図1.10参照),野外実験でも期待された通りの性能を発揮した.
(a) (b)
図1.10 浮体型洋上発電の野外実証実験中のレンズ風車(3kW×2機)と実験結果
また、一方でマルチローターシステムへの適用についても研究が進められている.マル チローターシステムは,基本ユニットの風車を複数個,同じ垂直面内にタワーで支持した
8
集合風車システムである[26-29].ロータ翼の周囲に輪(ディフューザ)があるレンズ風車では,
風車間の干渉は翼のみの風車より強く,通常風車よりも大きな出力増加を得られることが 分かっている[30-32].現在,3基の風車によるマルチローターのレンズ風車が,フィールド試 験を実施中であり(図 1.9(c)参照),実用化に向けての認証試験を控えている.今後はさら なる効率向上のため,スタガード配置など,さらに最適な配置について研究が進められる 予定である.
1.2.3 垂直軸型風車(VAWT)に関する従来研究
冒頭で述べたように,本研究では集風構造体を,垂直軸型風車(Vertical Axis Wind
Turbine:以下VAWTと呼ぶ)に適用する.1.2.1項,1.2.2項では集風構造体と,水平軸型
風車を用いたレンズ風車について述べたが,次に本項では,集風構造体を適用する VAWT に関する従来研究について述べる.VAWT には様々な種類のものが存在するが,本研究で は直線翼固定ピッチ型のVAWTを使用したため,これに関するものに絞って記載する.
翼に発生する揚力を利用して発電する“揚力型”の垂直軸型風車を初めて発明したのは,
フランスの G.J.M.ダリウスである.彼は図 1.11(a)に示すような曲線的なロータブレードを 持つVAWTを発明し,1931年に特許を取得した[33].この曲がり羽根の形状は,回転時に遠 心力による曲げ変形をブレードに生じさせず,引張応力のみが作用するように,縄跳びの 綱形状をしたものであった.しかしながら,実際には風力と遠心力の組み合わせでブレー ドが変曲し,疲労破壊を引き起こすことが分かった.また,曲り羽根は製作が難しく,大 型風車の場合は輸送,組立が大変な上,風車の自己起動性もよくなかった.そのため,系 統連系用の大型ダリウス風車は,1980 年代にはカナダやカリフォルニアのウインドファー ムで相当数が運転されていたにもかかわらず,その後撤去された[12].
(a) (b) (c)
図1.11 (a) カナダEoleプロジェクトの4MWダリウス風車(1987-1993)[34]; (b) ダリウスの 特許を取得した風車; (c) マクダネル・ダグラス社が開発したジャイロミル風車[35]
9
“ダリウス型風車”と言えば図 1.11(a)のような曲がり羽根形状の風車を指すことが多い が,ダリウスは彼の取得した特許の中で,“製作容易可のために羽は直線でもよい”とも記 述しており,特許の図にも描いていた(図1.11(b)参照).ダリウスが特許に記載した直線翼 のVAWT は,空気力学的性能を向上するために,1 回転中にブレードのピッチ角を変更で きる構想のもので,Walterら[36], Fanuciら[37], Brulleら[38]が研究し,1970年代の中頃にマク ダネル・ダグラス社(現ボーイング社)等によって開発された(図 1.11(c)参照)[35].しか しながら,“ジャイロミル風車”と呼ばれたこの風車は,複雑な機構を有することから,故 障しやすくコスト高で,商品化には至らなかった[12].
固定ピッチ式の直線翼垂直軸型風車は,ジャイロミル風車と同じく1970年代の中頃から,
日本の関ら[12]によって研究された.関らは固定ピッチ式の直線翼垂直軸型風車を 30年以上 研究し,図1.12に示すような翼型の開発や,最大110kWの風車の野外試験などを行った.
現在,垂直軸型風車は,もっぱら小型の電源として使用されているようで,大型のもの を紹介する文献などは見当たらない.
(a) (b)
図1.12 関らの風車とTWT翼型
1.2.4 垂直軸型風車(VAWT)の特徴
VAWTは水平軸型風車にはない,以下の長所を持っている.
1) 無指向性であり,水平軸風車のように頻繁に変化する風向に回転面を対向させる必要 がない.
2) 発電機などの重量物を地表近くに置くことができ,整備などが容易である
3) 風向に回転面を対向させる必要がないため,風向への駆動に伴うジャイロスコピック な荷重を受けない.
4) 地上からの垂直方向の風速分布の影響を受けない.
5) 垂直軸風車によって風から取り出した機械的エネルギーは,簡単な駆動軸によって下
10
方へ伝達することが出来る.これは地上の機械室内に負荷を設置する上で便利である.
さらに直線翼固定ピッチ形式の場合は以下の長所も持ち合わせる.
1) 可変ピッチ機構を無視することで構造上のまとまりが良くなり,製造保守費用が低下 する.
2) 風車サイズが大きくなると遠心力による負荷が減少する.
3) 直線翼のため量産加工が簡単で加工コストが低い.
4) 多段積みが可能であり,設置スペースとの兼ね合いで大型化が可能である.
5) 幾何学的な有利さからダリウス型よりも高い変換効率が得られる, とも言われている[
1.2.5 周辺付加物の垂直軸型風車(VAWT)への適用に関する研究
VAWT への周辺付加物の設置による性能向上の研究としては,ここ数年のものとして,
Upstream Deflector[39](図1.13(a)参照)や,Omni-Direction-Guide-Vane(ODGV)[40](図1.1.3(b) 参照)などがある.これらの研究は,風車に当たる風の向きを変化させることにより,風 車の出力を向上させようとする試みである.本研究では,風車にあたる風速自体を加速さ せる視点で,周辺付加物をVAWTに適用する.
(a) (b)
図1.13 VAWTへの周辺付加物の適用例
11 1.3 研究目的
本研究は,下記の3点を目的として行う.
1) VAWTで高い出力が得られる風レンズ形状についての研究
効果的にVAWTの出力を増加させる風レンズの形状パラメータを研究する
効果的にVAWTの出力を増加させる風レンズの設置位置を研究する
VAWTの形状が変化した場合にも同様に出力増加効果が得られるかを研究する
VAWT周りのレイノルズ数が変化した場合の出力増加効果について研究する 2) VAWTのトルク発生メカニズムの解明
3) VAWTの性能をさらに向上させる周辺付加物形状の探究
1.4 研究方法
1.4.1 研究のアプローチ
1) VAWTで高い出力が得られる風レンズ形状の調査
風洞での出力性能実験にて,まずVAWTにつば付きベンチュリ形状である風レンズを 適用し,風レンズの形状,及び風車との主流方向の相対位置を変化させることで,効 果的に出力を増加させる風レンズの形状を探る.すなわち,どのような形状の風レン ズが効果的に出力増加を達成するかをパラメトリックスタディにより調べる.また,
風車の翼枚数,翼型,及び翼コード長を変化させ,風車の形状が変化した場合にも同 様に出力増加効果が得られるかを確認する.加えて,実験風速を変化させることで実 験のレイノルズ数を変化させ,レイノルズ数が変化した場合の出力変化についても調 査する.
2) VAWTのトルク発生メカニズムの解明
垂直軸型風車は水平軸型風車に比べて空気力学的特性が不明な部分が多い.高い出力 が得られる周辺付加物の形状を発見するためにはVAWTのトルク発生メカニズムの解 明が不可欠である.よって,垂直軸型風車まわりの流れ場と,ブレードへの空気力の 作用の仕方を,CFDによって調査する.
3) VAWTの性能をさらに向上させる周辺付加物形状の探究
VAWT は風に対する回転軸の方向が水平軸型風車とは異なるため,水平軸型風車とは 異なる空気力学特性を持つと考えられる.そのため,最適な周辺付加物の形状もVAWT 特有の形状である可能性が高い.よって,風レンズの適用と,メカニズムの解明に取 り組んで得られた知見をもとにして,よりVAWTに適した形状を風洞実験とCFDによ り調査する.
12 1.4.2 論文構成
本論文の構成は以下の通りである.
第2章:風洞実験結果を示す.具体的には,出力性能実験,流速測定実験,可視化実験の 結果を示す.
第3章:垂直軸型風車周りの流れ場の数値計算結果を示す.具体的には,流れ場の様子,
流速やブレードに発生するトルク分布等を可視化する.
第4章:実験結果,及び数値計算結果で得られた結果から,効果的な風レンズ形状や,流 れ場が出力性能に与える影響,トルクの発生メカニズム等について考察する.
第5章:本論文を総括する.
13
第2章 風洞実験法
2.1 風洞実験法 2.1.1 大型境界層風洞
実験に用いた風洞は,九州大学応用力学研究所の大型境界層風洞である.3.6m幅×2m高 さ×15m長さの測定部を有し,最大風速は30m/sである.実験の際,風車及び風レンズ構造 体によるブロッケージの影響を防ぐため,主流方向長さ6mにわたり天井,及び両側壁を解 放し,セミオープンの測定部として実験を行った.図2.1に大型境界層風洞の構造と特性を 示す.
図2.1 大型境界層風洞の構造と特性 図2.2 実験で使用した垂直軸型風車
2.1.2 実験に使用した直線翼固定ピッチ式垂直軸型風車
実験に用いた垂直軸型風車を図2.2に示す.直線翼固定ピッチ式であり,ピッチ角は常に 0°とした.ブレード,支持アームともに木製である.風車直径Dwt=0.7m,ブレード長さl=0.7m で,Twを風洞測定部の幅と置いたとき,Dwt/Tw=0.19 である.図2.2のように座標系を定義 したとき,風車は中心が床面からの高さz=0.7mとなるように設置した.翼枚数は2枚翼,
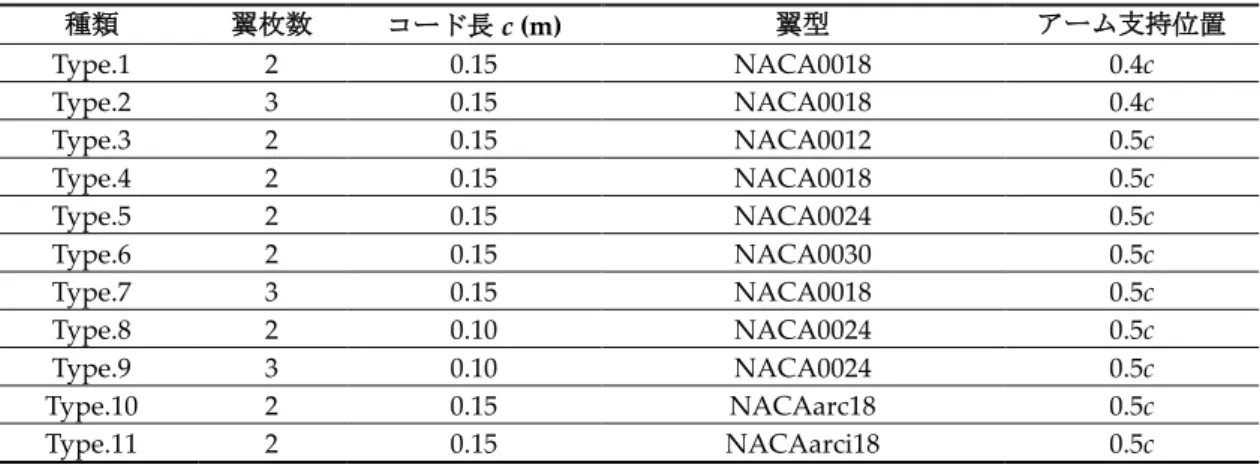
または3枚翼とした.翼のコード長は主にc=0.15m,一部の実験ではc=0.1mのものを用い た.翼型は主にNACA系列の対象翼を用い,一部の実験では翼の中心線を風車回転半径の 曲率に合わせた円弧翼を用いた.また,翼に対するアームによる支持位置は,翼の前縁か ら 0.4c,または 0.5c とした.表 2.1に使用した風車の形状をまとめる.表 2.1 に記載した
NACAarcXXの翼型記号は,NACA00XXの対象翼型の中心線を風車回転半径の曲率に合わ
せて変形させた円弧翼を示す.この翼型は他の研究においてもしばしば使用されている[10,11].
NACAarciXXの翼型記号は,NACAarciXXの翼型を上下反転させた形状を示す.
Dwt
l
x z y
14
表2.1 実験で使用した風車の形状
種類 翼枚数 コード長c (m) 翼型 アーム支持位置
Type.1 2 0.15 NACA0018 0.4c
Type.2 3 0.15 NACA0018 0.4c
Type.3 2 0.15 NACA0012 0.5c
Type.4 2 0.15 NACA0018 0.5c
Type.5 2 0.15 NACA0024 0.5c
Type.6 2 0.15 NACA0030 0.5c
Type.7 3 0.15 NACA0018 0.5c
Type.8 2 0.10 NACA0024 0.5c
Type.9 3 0.10 NACA0024 0.5c
Type.10 2 0.15 NACAarc18 0.5c
Type.11 2 0.15 NACAarci18 0.5c
2.1.3 周辺付加物の形状
2.1.3.1 風レンズ型の周辺付加物
風車の周りに図2.3,図2.4に示すような,鉛直方向に同一の断面をもつつば付きベンチ ュリ型の周辺付加物(以下,今回の研究で使用したこの形状を風レンズ形状と呼ぶことに する)を設置した.
図 2.3 はディフューザ部が平面形状の風レンズ(以下,平面型風レンズと呼ぶ)である.
平面型風レンズは,アルミパイプで補強したウッドラック板を用いて製作した.ディフュ ーザ長さはL,つばの幅はh,ディフューザ開き角はφ,スロート部の幅D,高さWである。
実験では,L,h,φを変化させて,出力性能の変化等を調べた.D=0.8m,高さはW=1.43m
(=1.79D)とし,鉛直方向には風車単体を十分に覆う形状とした.
(a) Plan view (b) Photograph
図 2.3 平面型風レンズの形状: (a) 平面図 (風レンズの高さは W);
(b) 実物写真 (L = 1.14D m, φ = 10°, h = 0.5D m).
15
(a) (b)
図2.4 曲面型風レンズの形状: (a) 平面図 (b) 実物写真
表2.2 実験で使用した風レンズの形状 種類 インレット
形状,開き ディフューザ 開き角φ
ディフューザ
長さL つばの幅h
Type.A 平面,10° 5° 1.14D 0.25D
Type.B 平面,10° 5° 1.14D 0.50D
Type.C 平面,10° 10° 1.14D 0.25D
Type.D 平面,10° 10° 1.14D 0.50D
Type.E 平面,10° 15° 1.14D 0.25D
Type.F 平面,10° 15° 1.14D 0.50D
Type.G 平面,10° 20° 1.14D 0.25D
Type.H 平面,10° 20° 1.14D 0.50D
Type.I 平面,10° 10° 0.57D 0.25D
Type.J 平面,10° 10° 0.57D 0.50D
Type.K 平面,10° 20° 0.57D 0.25D
Type.L 平面,10° 20° 0.57D 0.50D
Type.M 平面,10° 30° 0.57D 0.25D
Type.N 平面,10° 30° 0.57D 0.50D
Type.O なし 20° 0.57D 0.25D
Type.P なし 20° 0.57D 0.50D
Type.Q 曲面型 0.25D
図 2.4 はディフューザ部が曲面形状の風レンズ(以下,曲面型風レンズと呼ぶ)である.
φ=20°,L=0.57Dの平面型風レンズのつばの幅を半分とし,その分ディフューザの開きを大
きくした形状である.曲面型風レンズは,木板で補強したアクリル板を用いて製作した.
スロート部の幅Dと,鉛直方向高さWは平面型風レンズと同じである.
実験に使用した風レンズの形状を表2.2にまとめる.インレット,ディフューザ,及びつ ばの形状がそれぞれ異なる風レンズに,AからQの形状記号を順に振って識別した.
h=0.5D Flat-panel-type
diffuser Curved-surface-type diffuser
φ=20°
h=0.25D
16
2.1.3.2 平板形状などを組み合わせた周辺付加物
前項と同じく,風車の周りに図2.5(a)に示すような,鉛直方向に同一の断面をもつ周辺付 加物を設置した.ただし,この一連の実験では付加物を設置する領域を,図 2.5(b)に示す Lx,Lyの内部とあらかじめ決めておき,限られた領域を用いて風エネルギーに対する出力を 比較することで,より効果的に出力増加が得られる形状を別の視点から探しなおした.具 体的には,図2.6に示すような曲面(または平面)形状の付加物を検討し,VAWT周りに設 置した.図2.5(b)のLx(m),Ly(m)は式(1),式(2)のように設定した.この寸法は,高橋 ら[41]が設計,製作したディフューザ構造体に合わせて設定している.ベンチュリ形状の付 加物については,スロート位置がx = 0となるように設置した.Fig. 3に付加物の形状とあ わせて略記号を示す.以降,付加物の形状を“(yが正の領域に設置した曲面の略記号)-(y が負の領域に設置した曲面の略記号)”と表記する.各曲面の詳細な形状データについては,
文献を参照されたい[42].
-0.295 ≤ Lx ≤ 0.428 (2.1) -0.756 ≤ Ly ≤ -0.400,0.400 ≤ Ly ≤ 0.756 (2.2)
2.1.4 出力性能実験法
出力性能実験は,風車に非接触トルク計(定格 0.5N・m)を接続し,無負荷から徐々に 負荷をかけた状態での風車のトルクQ (N・m),および回転数n (Hz)を計測し,発電量P(W)
=Q・2πn を算出することで出力性能曲線を得た.トルクの算出精度は±0.2%である.機器 の仕様を表2.3に示す.実験風速は主にU∞=6m/s,一部の実験でU∞=6,8,10m/sとした.
(a) Photograph (b) Plan view
図2.5 周辺付加物の形状と設置位置: (a) 全景写真; (b) 平面図
17
Ellipsis Plan view
(Flow from left)
Inlet Diffuser Symmetrical designation
CR
-
CR
Ellip- soidal shape
Polinom-inal
approxi-mation CR-CR
CY(b)
-
Cycloidal shape (with brim)
CY(b)- CY(b)
CY
-
Cycloidal shape (no brim)
CY-CY
S
-
Flat
shape Flat shape S-S
b(U) b(C) b(D)
-
- -
b(U)-b(U) b(C)-b(C) b(D)-b(D)
N
-
(With no
structure) - -
N-N 図2.6 周辺付加物の形状と表現記号.
表2.3 出力性能実験で使用した機器の仕様
機器 製造者 型式 測定精度
Torque detector
ONO SOKKI Co. Ltd. (Kanagawa, Japan) SS-100
±0.2% F.S
Torque converter TS-2600
AC servo-control system SANYO DENKI Co. Ltd. (Tokyo, Japan) PY0A 150A - 0.452m 0.756m
0.452m0.452m0.452m 0.756m0.756m0.646m
b(U)
b(C) b(D)
18 2.1.5 流速測定実験法
流速測定実験は,ACトルクモーターによって回転数n (Hz)で風車を回転させ,その回転 数における風車周辺流速を,風車の上流側で測定した.流速測定にはI型プローブを用いた.
プローブはスタンドに固定し(図2.7参照),スタンドの位置を移動させながら計測した.流 速の計測位置を図2.8に示す.風車単体の場合と,風レンズ付き風車の場合で,計測位置は 同じである.また,実験に使用した機器の接続と型番を図2.9と表2.4に示す.実験風速は U∞=6m/sである.
(a) (b)
図2.7 流速測定に用いた,I型プローブ・静圧管つきのスタンド 図2.8 流速測定位置
図2.9 流速測定実験に使用した機器の接続
19
表2.4 流速測定実験に使用した機器の型番
2.1.6 流れ場の可視化実験法
流れ場の可視化実験にはスモークワイヤー法を用いた.鉛直方向に風車を2等分する高 さに熱線を張り,煙を流して流れ場を観察した.風レンズ後方の流れを可視化する場合に は,風レンズの後方にワイヤーを設置した.風レンズのみではなく風車がある場合には,
ACトルクモーターによって回転数n (Hz)で風車を回転させた.スリットをはめたプロジェ クタで,鉛直方向に垂直な面(観察面)を多方向から照らし,風洞上部からデジタルビデオカ メラ,及びデジタル一眼レフカメラで撮影した.可視化剤にはアルミ粉又は鉄粉を混ぜた 流動パラフィンを用いた.実験風速はU∞=1m/sである.実験に使用した機器の接続を図2.10 に,機器の型番は表2.5に示す.
図2.10 流れ場の可視化実験に使用した機器の接続
表2.5 流れ場の可視化実験に使用した機器の型番
機器 製造 型番
I-type probe NIHON KAGAKU KOGYO MODEL 0251R-T5
Servo motor SANYO SOKKI P20B13400DXS00
Bridge NIHON KAGAKU KOGYO MODEL1011 CTA
ANEMOMETER
Linearizer NIHON KAGAKU KOGYO MODEL1023 LINEARIZER
Filter SAN-EI instrument co.LTD MS-521
AC servo-control system SANYO DENKI PY0A 150A
機器 製造 型番
Servo motor SANYO SOKKI P20B13400DXS00
Power supply TOSHIBA SLIDAC S130
Digital video camera SONY DCR-TRV50
Digital camera NICON D500
Projector RIKAGAKU SEIKI co.LTD HILUX-HR
AC servo-control system SANYO DENKI PY0A 150A
20
21
第3章 数値計算法
3.1 数値計算法の概要
本節では本研究で用いた数値計算法の概要について説明する.
3.1.1 数値計算法の選定
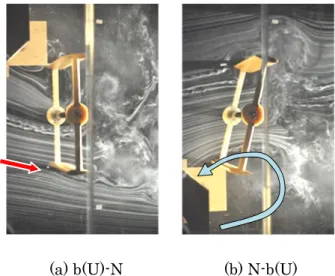
図 3.1 は藤沢ら[]による垂直軸型風車のブレード周りの可視化実験結果を示している.こ の結果から見て取れるように,垂直軸型風車のブレード周りの流れ場は,時に翼表面から の大きな剥離が発生する流れであることが分かる.
(a) (b)
図3.1 藤沢らによる垂直軸型風車のブレード周りの可視化実験結果(1997年)
垂直軸型風車まわりの流れ解析を行う際に,着目すべきポイントは以下の4点である.
1) ブレードと近寄り流の関係が,ブレード回転角によって大きく異なる.
2) 回転角によっては,ブレードまわりの流れが大規模に剥離する.
3) 上流側をブレードが通過することによって乱れた後流の影響を,下流側のブレード が受ける.
4) 回転の速さによって,上記すべての度合が変わってくる.
これらのことから,計算は非定常計算であり,かつ翼まわりの流れ(その後流も含む)を 正しく模擬できる方法である必要がある.これをふまえて計算を行おうとするとき,難点 は以下の3点である.
翼が移動する(移動境界問題).
翼まわりの計算である(流線型物体周りの流れ).