九州大学 博士論文
進化的計算手法を用いた建築計画に関する研究
A Study of Architectural Planning Using Evolutionary Computing Methods
2009
年
1
月
井上 誠
Makoto Inoue
概要
集積回路などの小さなスケールから建築・造園,さらには地域や都市までのス ケールで,それぞれの空間計画分野がある.この場合の空間とはその目的に必要 なモジュール,部屋,建物などを指し,これらをある範囲内にいかに配置,または 範囲を分割することで部分空間を秩序付けるかという問題が空間計画である.こ の空間計画にはその対象に応じて計画要件や条件が多数あるため,空間計画を人 間が行うには経験や技能,さらにはセンスなどが必要とされている. 本研究の目的は進化的計算(EC)手法を用いて建築計画,主に建築平面(間取 り)計画を行うことに関する提案を行い,その実験と考察によって実際の建築計 画への利用可能性を示すことである.具体的には,ユーザにとって好ましい多様 な空間配置案を提示できる支援システムを構築することで,空間配置計画の未習 熟者であっても利用が可能で,空間配置計画の習熟者であれば業務短縮を可能と するものを目指している.また,この建築(空間)計画ではその複数の条件に合致 し,ユーザの好みや意図を反映する結果(計画案)を複数提示でき,さらにユーザ が思いもよらなかったがあり得る結果をも提案できる仕組みを目指すものとする. 計算機を用いて建築計画を行うには,まず空間構成をどのように表現するか,つ まりモデル化が必要である.それらのモデルの部屋に関する問題点の要約は次の 通りである.部屋間に隙間ができる場合がある.部屋空間の重複がある場合があ る.部屋の形状が矩形になり難い場合がある.一方,部屋の形状が変化できない, 一定である場合がある.部屋の形状が矩形のみで L 字形などのバリエーションが できない場合がある.部屋の位置が変更できない,一定である場合がある.建築を はじめとする空間計画分野ではその目的が多数にわたることが一般的である.多 目的を最適化する技術として進化的多目的最適化手法を用いることがあるが,空 間計画分野においてこの進化的多目的最適化手法を用いた研究はそれ程度多くな い.進化的多目的最適化と対話型進化計算を組み合わせた空間計画支援システム はまだない.この二つの進化計算手法の有効な組み合わせ方も研究課題の一つで ある. 進化的計算手法を用いた建築計画(支援)システムは空間配置案生成部と最適 化部からなる.空間配置案生成部は空間生成アルゴリズムと成長ルールを核とし て建築間取り案を生成し,最終的な最適化部は,要求仕様の多制約下で多目的を 最適化するための進化的多目的最適化(EMO)と,経験・知識・感性など定量化 が困難な目的をも満たす設計のための対話型進化的計算(IEC)からなる.本研究で行う主な項目は次の通りである. 1. 空間配置案を作成する新しい手法を提案すること. 2. この手法を建築間取り案作成に応用し,作成された間取り案が EC 手法によ る進化的多目的最適化できることを示すこと. 3. さらにユーザの経験,知識及び好みを多目的最適化に組込む枠組み(対話型 進化的計算)を導入し実験・研究をすること. 1 番目の空間生成アルゴリズムはセルラ・オートマトンにヒントを得たもので, その成長プロセスによって必要な部分空間を作成する.また成長ルールによって その形状をコントロールする仕組みを提案する.提案手法は生成される部分空間 の形,大きさ,位置の制約が少なく,部分空間の間の隙間の大きさが調整できる ことが特徴である.2 番目の進化的多目的最適化は建築計画に必要な 4 目的と 6 目 的を設定し,それぞれの場合について EMO 手法の一つである多目的進化的アル ゴリズム(MOGA)で生成された建築間取り案が最適化されることを実験的に示 す.また,多様な建築間取り案が生成できるようニッチ手法の EMO への導入の効 果も評価する.この実験結果は,提案した空間生成アルゴリズムと成長ルールが, 空間計画支援システムに応用できることを裏付ける.3 番目の EMO への IEC 手法 の導入検証のために複数の組み合わせの実験を行った.この実験には擬似人間に よる評価を用いた.次に被験による実験も行った. 本研究で成し遂げた独自性のある事項をまとめると,建築計画のための EC に よって最適化可能な空間生成アルゴリズム及びそのルールを作成し提案したこと, 今回設定した建築計画問題に合うように EMO(MOGA)を調整したこと,対話 型進化的多目的最適化として EMO に対話型進化的最適化手法の導入を試み,そ の組み合わせ方について有用な検証を行ったことが上げられる.また今までは空 間計画において制約が伴っていたが,本研究提案のものは空間計画支援システム に利用可能なレベルに達したと言える.
Abstract
Architectural (spatial) planning problems are how necessary rooms (subspaces) are arranged within a planning area or how the subspaces are ordered by dividing the area. The experience, the skill, and the sense, etc. are needed so that planners may hold the space plan because there are a lot of plan requirements and conditions in this space plan according to the objects.
The purpose of this research is to propose it concerning the architectural plan, es-pecially the (room layouts) plans by using Evolutionary Computation (EC) meth-ods, and the use possibility to actual architectural plans is shown by the experi-ments and consideration. It is general that the purposes extend to many in the space plan fields including Architecture. Evolutionary Multi-objective Optimiza-tion (EMO) methods might be used as a technology that optimizes multi-objective. However, there is too no research that uses this EMO in the space plan fields. In addition, there is no spatial planning support system that combines EMO with Interactive Evolutionary Computation (IEC) yet.
Architectural planning (support) system that uses EC methods of the proposal consists of the optimization part with spatial layout planning generation part. The spatial layout planning generation part consists of the space generation algorithm and the growth rules, generates the architectural room layout plans. The opti-mization part consists of EMO to optimize multi-objective under restrictions of specifications, and IEC for planning that fills difficult objectives to quantify like experience, knowledge, and sensibility, etc...
This research shows a proposal of the new method that makes the spatial layout plans, the made room layout plans should be able to be optimized by EC methods by applying this technique to the architectural room plan making, and the spa-tial generation algorithm and the growth rule proposes by the experiment can be applied to the spatial planning support system.
The original matter that is accomplished by this research is brought together as follows. It made and it proposed the spatial generation algorithm and the rule that were able to be optimized for architectural planning by EC, EMO has been adjusted to be suitable for the architectural planning problem of setting it this time, and the introduction of the IEC method was tried to EMO as the interactive
EMO and a useful verification was done about the how to combine. Moreover, it can be said that the one of this study proposal reached at the level that can be used for the spatial planning support system though the restriction had been accompanied in the space plan up to now.
目 次
第 1 章 序論 1 1.1 背景と従来の問題点・課題 . . . . 2 1.1.1 背景 . . . . 2 1.1.2 従来の問題点と課題 . . . . 3 1.2 目的とアプローチ . . . . 5 1.3 空間計画支援システムの全体構成 . . . . 7 1.4 章構成 . . . . 9 第 2 章 関連技術と関連研究 11 2.1 関連技術 . . . 12 2.1.1 人工生命 . . . 12 2.1.2 ボロノイ図 . . . 12 2.1.3 進化的多目的最適化 . . . 13 2.1.4 対話型進化的計算 . . . 17 2.2 関連研究 . . . 18 第 3 章 空間生成アルゴリズム 24 3.1 アルゴリズムの提案 . . . . 25 3.1.1 空間生成アルゴリズム . . . 25 3.1.2 成長ルール . . . 27 3.1.3 実験で用いた成長アルゴリズムと成長ルール . . . 29 3.1.4 遺伝子コーディング . . . 30 3.2 空間生成アルゴリズムの実験 . . . . 32 3.3 間取り計画への応用 . . . . 37 第 4 章 進化的多目的最適化 39 4.1 最適化部の手順 . . . 404.2 間取り問題の目的(4 部屋の場合) . . . 41 4.3 進化的多目的最適化(4 部屋の場合)実験 . . . 46 4.3.1 実験条件 . . . 46 4.3.2 評価実験結果 . . . 48 4.3.3 考察 . . . 52 4.4 間取り問題の目的(6 部屋と廊下の場合) . . . 54 4.5 進化的多目的最適化(6 部屋と廊下の場合)実験 . . . 57 4.5.1 実験条件 . . . 57 4.5.2 評価実験結果 . . . 57 4.5.3 考察 . . . 61 第 5 章 対話型進化的多目的最適化 65 5.1 対話型システムの意義と課題 . . . . 66 5.2 システム構成 . . . 67 5.2.1 EMO と IEC の組み合わせ . . . . 67 5.2.2 擬似人間の設定 . . . 67 5.3 実験 . . . 70 5.4 考察 . . . 82 第 6 章 建築計画支援システム主観評価実験 85 6.1 実験仕様 . . . 86 6.1.1 目的と概要 . . . 86 6.1.2 実験の手順 . . . 89 6.1.3 実験の説明 . . . 89 6.2 評価実験 . . . 92 6.2.1 各目的値の結果 . . . 92 6.2.2 アンケート結果 . . . 94 6.3 考察 . . . 105 第 7 章 考察と今後の課題 108 第 8 章 結言 112 謝辞 115
公表論文 124
1.1
背景と従来の問題点・課題
1.1.1
背景
集積回路(図 1.1),電子部品の基板配置,出版物及びウェブページのレイアウ トデザイン,建築(図 1.2)や庭園の設計,地域及び都市計画などの空間配置案作 成には技能,知識,経験,美的センスや感性などが必要である.また複数の評価 項目を満たすような多目的最適化も多くの空間計画で求められる.さらにこれら の多目的がお互いにトレードオフの関係にある場合や定性的な場合も多く,その 最適化は容易ではない.そのため空間計画の支援システムが求められている. 空間計画の実務では計画を担当する者が単独であったり計画手法が固定されて いたりしていては多様な計画案は作成できない.計画者にとって計画条件が多数 であったり複雑過ぎたりする場合は複数の計画案を作成・検討することは出来な いことも少なくない.さらには 1 つの計画案すら導き出すことが出来ない場合も ある.人間が行う空間計画の手法は,部分から全体を積み上げるボトムアップ型 アプローチ,全体から部分へと流れるウォーターフォール型アプローチとそれら を繰り返すアプローチが多い.部分空間を変更する場合にその空間に影響される 周辺を調整または変更する必要が出てくることがほとんどであるため,人間の用 いている上記のアプローチでは一から計画をやり直す事も少なくない.これらの ことからも空間計画支援システムの需要が高い.図 1.2: スケルトン・インフィル住宅(SI住宅)[28].国土交通省の普及促進す る集合住宅のあり方で,建物のスケルトン(柱・梁・床等の構造躯体)とインフィ ル(住戸内の内装・設備等)とを分離した工法による共同住宅.インフィル部分 の個々の計画ニーズが見込まれる.
1.1.2
従来の問題点と課題
(a) 間取り生成 空間配置案作成支援システムを設計するには,まず空間構成をどのように表 現するか,つまりモデル化が必要である.建築間取りの分野でもこれまでい ろいろなモデルが提案されてきた [43, 44, 45, 48].それらのモデルの部屋に 関する問題点の要約は以下の通りである(詳細は第 2.2 節で述べる).なお, ここでは建築の空間の場合を想定しているため,「部屋」という表現を用いて いる.建築以外の一般的な空間計画の応用先のためには「部分空間」とする. 1. 部屋間に隙間ができる場合がある. 2. 部屋空間の重複がある場合がある. 3. 部屋の形状が矩形になり難い場合がある. 4. 一方,部屋の形状が変化できない,一定である場合がある. 5. 部屋の形状が矩形のみで L 字形などのバリエーションができない場合 がある. 6. 部屋の位置が変更できない,一定である場合がある. (b) 間取り計画のための多目的 建築をはじめとする空間計画分野ではその目的が多数にわたることが一般的 である.多目的を最適化する技術として進化的多目的最適化手法を用いることがあるが,空間計画分野においてこの進化的多目的最適化手法を用いた研 究はそれ程度多くない.例えば,徳田らは集合住宅配置計画 [64] の,谷垣ら は一戸建て住宅部屋配置計画 [62] の,各目的に比重を掛け合わせて単目的に することで最適化を行っている.目的の比重を予め限定することは,トレー ドオフ関係にある複数の目的の関係性を固定してその優劣を判定することに なり,また建築の利用者や計画者の意図を計画に反映する可能性を狭めるこ とにもなる.多目的の関係性を維持しつつ多様な解を導き出すことが課題で ある. (c) 定性的要素の最適化 従来の対話型進化計算ではユーザ評価だけで進化計算が進められるのが一般 的である.しかし建築などの空間計画分野では短時間での視覚情報や直感だ けでは個体の優劣の判断ができない.また計画の専門家であっても計画に必 要な項目のチェック漏れが生じることもある.そこで定量的要素は計算機で 最適化を行い,計算機では難しいと思われる定性的要素を対話型進化計算で 行うといった組合せが有効だと思われる. 進化的多目的最適化と対話型進化計算を組み合わせた空間計画支援システム はまだない.この二つの進化計算手法の有効な組み合わせ方も研究課題の一 つである. 目的数が 5 つ以上のような多数目的の場合,進化計算が途中で進まなくなる 問題も近年指摘されている [23] .その一つの解決策として多数目的の中から 重要なものを選択し進化的計算に用いる「意思決定者の選好 [42]」が提案さ れている.この意思決定者の選好の一つの仕組みとしての対話型技術利用の 可能性もある.
1.2
目的とアプローチ
本研究の目的は進化的計算手法を用いて建築計画,主に建築平面(間取り)計画 を行うことに関する提案を行い,その実験と考察によって実際の建築計画への利 用可能性を示すことである.具体的には,ユーザにとって好ましい多様な空間配 置案を提示できる支援システムを構築することで,空間配置計画の未習熟者であっ ても利用が可能で,空間配置計画の習熟者であれば業務短縮を可能とするものを 目指している.また,この建築(空間)計画ではその複数の条件に合致し,ユー ザの好みや意図を反映する結果(計画案)を複数提示でき,さらにユーザが思い もよらなかったがあり得る結果をも提案できる仕組みを目指すものとする. 本研究の建築計画支援システムは建築計画エスキース段階でのブロック・プラ ン作成の支援的利用を想定している.そしてその計画対象は集合住宅の一住戸の 間取り計画を例に上げ,計画空間のモジュール化,部屋の形状などを限定するこ とで最適化の探索空間を制限している.また,間取り成立のための目的も建築計 画的に最小限の一般的なものとしている. 本研究の主な目的を以下にまとめる. 1. 空間配置案を作成する新しい手法を提案すること.特に今まで出来なかった 以下の点を同時に満たすことを目標にする. (a) 部屋(部分空間)の形状が計画対象に適した,まとまりのあるものが生 成できる. (b) 部屋の位置,大きさが計画対象に応じた自由度で変化できるものとする. (c) 計画範囲に無駄な隙間が生じ難いものとする. (d) 進化的計算(EC)による最適化に適したものとする. 2. この手法を建築間取り案作成に応用し,作成された間取り案が EC 手法によ る多目的最適化(進化的多目的最適化(EMO))できることを示すこと. 3. さらに EMO に対話型進化的計算(IEC)手法を導入し,今までに無かった ユーザの経験,知識及び好みをも含む多目的最適化システムを構築すること. 本研究のアプローチを次に示す.1. 人工生命にヒントを得て空間配置案生成のためのアルゴリズムとルールを提 案する. 2. その提案のアルゴリズムとルールをプログラミングする. 3. 実験で使用する建築のマンションの一住戸の間取りのための設定をする. 4. 進化計算での目的(多目的)を設定する. 5. 進化的多目的最適化と対話型進化計算を今回の問題に合うように調整し組合 せを検討する. 6. 以上の条件でプログラムを走らせ進化計算実験を行う. 7. 実験の結果得られた間取りと目的値の進化状況を観察及び評価を行う.
1.3
空間計画支援システムの全体構成
建築間取り案作成支援システムは空間配置案生成部と最適化部からなる.空間 配置案生成部は第 3 章の空間生成アルゴリズムと成長ルールを核として建築間取 り案を生成し,最終的な最適化部は,要求仕様の多制約下で多目的を最適化する ための進化的多目的最適化(EMO)と,経験・知識・感性など定量化が困難な目 的をも満たす設計のための対話型進化的計算(IEC)[61] からなる.図 1.3 はその 全体像を示す.第 3 章で述べる空間生成アルゴリズムと成長ルールは建築間取りに 限定されるものではなく,汎用的な空間配置案生成手法であり,図 1.3 の構成をほ とんど変えることなく,他分野の空間配置案生成支援システムとすることができ る.IEC を組み込んだ場合は,生成された間取りをユーザが評価できるよう,間 取り図として可視化する必要がある.図 1.3 上半分の空間配置案生成部にはユーザ へ可視化した間取り図を提示するための間取り図生成部が,下半分の最適化部に は IEC が組み込まれている. 図 1.3: 空間配置案生成部(上部)と最適化部(下部)からなる建築間取り案生成 支援システム.EC による空間計画支援システムは以下の様に間取り(プラン)を最適化する: 1. 初期個体の染色体を構成する座標は乱数で,または前もって手動で初期化さ れる. 2. 空間生成アルゴリズムと成長ルールは染色体からそれらに対応する間取り データを作成する. 3. EMO 部で間取りデータの多目的(定量的要素)に対する評価を行い,その 評価に基づき進化的最適化を行う. 4. 間取り図生成部は間取りデータから図(プラン)を作成しグラフィカル・ユー ザ・インタフェース(GUI)上に表示する.ユーザはそれらを見て評価(定 性的要素を含む)を行い,その評価に基づき EC 部で進化的最適化を行う. 5. 統合部では EMO 部と EC 部の統合を行う.実際には EMO 部と EC 部は一 体的に遺伝的最適化を行う. 6. 最適化された個体群(染色体)を次世代のものとして 2 へ返す. 7. 以上のステップを必要な間取りが得られるまで繰り返すことで間取りを最適 化する.
1.4
章構成
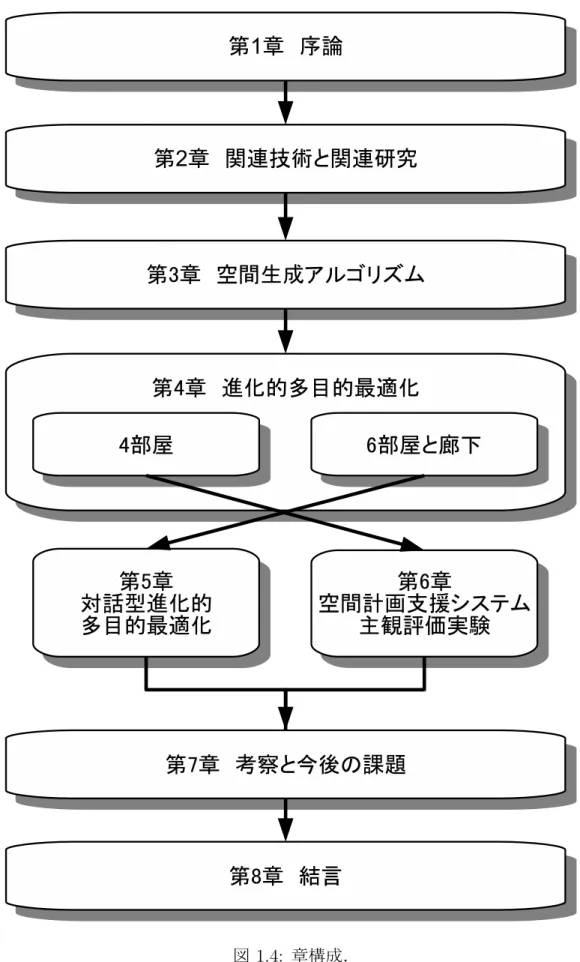
図 1.4 に章と章の関係を示す. • 第 1 章では序論として,研究の背景とこれに関する問題点と課題,研究の目 的とアプローチについて述べる. • 第 2 章では,本研究に関係する技術と研究についてまとめる. • 第 3 章では,第 1 章と第 2 章を受けて,空間計画支援システムの空間配置案 生成部を構成する空間生成のための成長アルゴリズムとその成長を制御する 成長ルールを提案する.その空間生成アルゴリズムを用いて空間レイアウト を作成しその特徴を述べる. • 第 4 章では,第 3 章で得られた建築間取り案を進化的手法で最適化する最適 化部について述べ,進化的多目的最適化(EMO)による建築間取り案の最 適化を実験的に評価する.具体的には集合住宅の 1 つの住戸内に部屋を配置 する問題を扱う.4 部屋を計画する場合と 6 部屋及び住戸内廊下を計画する 場合の 2 種類の実験を行う. • 第 5 章では,対話型進化計算(IEC)を EMO に組入れた手法による建築間 取り案の最適化を実験的に評価する.擬似人間を用いた実験によって IEC と EMO 組み合わせ方について検討を行う.ここでは 6 部屋と住戸内廊下の最 適化を行う. • 第 6 章では,IEC を EMO に組入れた手法による建築間取り案の最適化を被 験者実験により評価する.ここでは 4 部屋の計画を行う. • 第 7 章では研究全体と特に第 4 章,第 5 章及び第 6 章で行った実験とその結 果に対する考察と今後の課題に付いて述べる. • 第 8 章では結言を述べる.2.1
関連技術
2.1.1
人工生命
最近ではロボットのような物理的な形を持った動的な機械を指す場合もあるが, 一般にコンピュータ内でアルゴリズムによって動的に変化する個体あるいは個体 群を指す.人工生命の代表的な仕組みの 1 つにセルラ・オートマトンがある.一 定間隔に並んだ細胞状の自動機械のことで,決められた隣接関係などのルールに よって時系列に変化していく仕組みである.生物が生長,進化する過程をモデル 化している.そのルールは単純なものであっても結果は時間経過と共複雑なもの となることを利用する [60].本研究の空間生成アルゴリズムは一部この原理にヒン トを得て,成長プロセスを導入している.人工生命が常に動的に変化するものが 多い一方,本論文で提案の成長アルゴリズムは成長の限界を設けており,その時 点で空間の生成を完了するものとしている.2.1.2
ボロノイ図
前節で本論文提案の空間生成アルゴリズムが人工生命の概念を一部導入してい ると述べた.人工生命は時系列変化や成長プロセスを含んでいる.一方,ボロノ イ図は一般に母点からの距離を基にその部分空間を決定しているが,同時に成長 プロセスによる部分空間の生成の特徴も持っている.本論文で提案しているシス テムでの生成した空間計画案を観察すると各空間の成長の始点を中心とした空間 となっていることが解る.この視点で提案のアルゴリズムを解釈した時に計算幾 何学分野で扱われているボロノイ図 [1, 50, 51] に該当することが理解できる.詳 細は第 3.1.1 節で述べる.点 p と点 pnとの間のユークリッド距離を d(p,pn) とする と点 piのボロノイ領域 V (pi) は式 2.1 と図 2.1 で表される [51].一般にボロノイ図 は空間の分析やデータ圧縮技術に用いられる.空間計画に用いることはほとんど ない.特許検索で大規模集積回路(VLSI)のモジュールの位置決定に用いるもの はあったが,ボロノイ領域をモジュール空間そのものとして用いてはいない.よっ て本論文提案の空間生成アルゴリズムに独自性の可能性がある. V (pi) ={p|d(p, pi) ≦ d(p, pj), j ≠ i} (2.1)図 2.1: ボロノイ図
2.1.3
進化的多目的最適化
EMO の概要 進化的計算(EC)[14, 27, 60] では単目的を最適化するものが一般的であった. しかし近年は多目的の最適化を目標とする進化的多目的最適化(EMO)の研究が 進んできている.特に工学や計画設計分野における問題の最適化への EC 応用を 目標とした場合,その分野での問題は目的が複数存在するものがほとんどである ため,EC を用いて最適化を行う必要があれば EMO 手法を導入することは必然だ と言える. EMO の手法 具体的な EMO の手法は様々に提案されている [5, 55].その初期である 1985 年 には非パレート・アプローチによる Vector Evaluated Genetic Algorithm(VEGA) [57] が Schaffer によって提案された.次にパレート・アプローチによる手法とし て Goldberg による非劣勢ソーティング [13] が,Fonseca らによる Multi-Objective Genetic Algorithm(MOGA)[7] が提案された.それ以後様々な手法が提案され ている [4, 52].その多くがパレート・ランキングを基にして適応度を求め,遺伝 的操作を行うための個体選択に利用している.近年では Non-dominated Sorting Genetic Algorithm-II ( NSGA-II ) [6] が良く用いられる EMO 手法である.を使用しているが,それは MOGA が離散値問題にも対応できることやニッチング が導入できること [5],進化的多目的最適化の研究を始めるにあたってまずはその 体表的な手法で行いたいということが選択の理由である. パレート・アプローチ MOGA はパレート・アプローチによる EMO アルゴリズムである.ここでは EC での選択過程における適応度の根拠にパレート最適性によるランクを用いること をパレートアプローチとしている.パレート最適性とはイタリアの経済学者,社 会学者である Vilfredo Federico Damaso Pareto(1848-1923) が提唱したもので,複 数の目的を持つ事項の優劣関係を求める概念である.多目的を重み付けし単目的 に変換する方法もあるが,これでは優劣判断において多目的のトレードオフ関係 を考慮したことにならない. パレート最適解 多目的計画において,目的関数を f1, ..., fp,実行可能集合を X とするとき, fi(x)≤ fi(x∗) ∀i = 1, ..., p (2.2) fi(x) < fi(x∗) ∃i ∈ {1, ..., p} (2.3) が成り立つ x∗ ∈ X のことをパレート最適解,または非劣解と呼ぶ [46]. パレート・ランキング
Fonseca らの MOGA の場合,個体 i のパレート・ランク riは,i 番目の個体の
は全ての目的に関して優越されている比較対象個体が ni個とすると式 2.4,図 2.2
で表される.
図 2.2: Fonseca らによるパレート・ランキング法 [7].点 A∼H は個体を,丸括弧 内の数字はその個体のパレート・ランクを表す.ここでは目的関数値 f1,f2が最 大となるほど最良としている. 一般に多目的最適化では一つの最適解を求めるのではなく,多様なパレート最 適解を求めることが目標とされている.EMO によって得られた多様な解を案とし てユーザに提示することが本研究システムの目的である.それを最終的な解とし て絞り込むことは計画における次のステップである. MOGA の適応度 MOGA は解の多様性を保持するための手法であるニッチングが導入されている. まずは個体 i と個体 j との目的関数値空間での距離 dij を式 2.5 で求める.なお, fmax k ,fkminは個体 k の目的関数値の最大値と最小値とする.なお,本研究では目 的関数値空間ではなく個体の表現型である間取りにおいて個体間距離 dij を求めて いる(第 4.3.1 節参照). dij = v u u t∑M k=1 ( f (i) k − f (j) k fmax k − f min k )2 (2.5) 個体 i からの範囲(σshare)を指定し,比較対象である個体 k がその範囲内に存 在する場合にその距離 dikに応じて 0 から 1 を割り当てる関数をシェアリング関数
Sh(dik) として式 2.6 のように定める. Sh(dik) = { 1− dik σshare (dik ≤ σshareのとき) 0 (それ以外のとき) (2.6) シェアリング関数 Sh(dik) と,ランク riの個体数 µ(ri) からニッチ・カウント nci を式 2.7 で求める. nci = µ(r∑i) j=1 Sh(dij) (2.7) 個体 i の平均適応度 Niを式 2.8 で求める.これはランク順でソートした場合に その個体 i が何番目に位置しているかを意味する. Fi = N − ri−1 ∑ k=1 µ(k)− 0.5(µ(ri)− 1) (2.8) 平均適応度 Fiをニッチ・カウント ncjで割ることでニッチングを行う(式 2.9). Fj′ = Fj/ncj (2.9) 最後に式 2.10 によって平均適応度 Fi′の正規化を行う. Fj′ ← Fjµ (r) µ(r) ∑ k=1 Fk′ Fj′ (2.10) 以上のようにして求められた平均適応度 Fi′を EC の選択過程での基準値として 使用することで EMO が可能となる. EMO の問題点と課題 進化的多目的最適化では,解の多様性維持と進化計算の進行度合いがトレード オフ関係にあるとされている.つまり,解の多様性を求めようとすると進化計算 の進行度合いが遅れ,速い進化計算の進行を求めようとすれば解の多様性が失わ れる傾向にあると言われている.また,目的が多数(明確な定義は無いが 4 程度 以上)の場合を多数目的と呼び,問題や最適化アルゴリズムにも依るが目的数が 6 前後から進化的計算の進行が低下していくことが指摘されている [23, 24].この 問題を解決するための研究も始まったばかりであり,パレート・アプローチ以外 の方法を導入する方法が提案されている [23, 24, 71].
2.1.4
対話型進化的計算
一般的な進化的計算では個体の適応度を基に遺伝的操作を行う個体の選択を行 う.予め設定した目的関数によって個体の適応度が求められる.一方,対話型進化 的計算ではユーザが個体の表現型を見て評価を行い,その値を基に個体の適応度 とする.よって対話型進化的計算では予め目的関数を設定する必要が無く,目的関 数を設定することが困難な問題を最適化するのに向いている.美的要素,ユーザの 好みや経験などの定性的要素に関して最適化が出来るため,デザインや工学分野 での利用が想定できる [60, 61].対話型進化的計算システムを図 2.3 に示す.ユー ザが評価対象を見聞きし,ユーザの好み,知見,知識を基に主観的または予め設 定した目的関数値を含めて総合的に評価し,個体毎に評価点を決める.評価は 10 段階,5 段階,2 段階など様々なものがある.それらの評価値を EC の「評価」で の適応度(フィットネス)として用いることで対象の最適化を行う. 図 2.3: 対話型進化的計算システム 人間が評価を行うため,疲労などを考慮すると評価する個体数や回数が限られ る.また,評価にばらつきがあり安定性もないため,一般にその評価にはノイズ が含まれている.設定を変えた複数の評価実験を行う際にはその実験ケースの順 序が評価に大きく影響するなどの問題もある.2.2
関連研究
この節では本研究に関連する研究のサーベイを行い,本研究との類似点と相違 点を述べる.また,これを受けて最後には本研究の独自性を提示する.独立した空間や物の配置計画
本研究は「空間」計画を行う.空間計画とは部分空間(例えば部屋など)を計 画範囲に配置する,言い換えれば計画範囲を分割することになる.空間計画では そのほとんどの場合,部分空間が重なることや部分空間の間に隙間ができること を避けることが要求される. 一方,独立した空間や物の場合は計画範囲にいくつかの物をその位置と方向を変 えて配置することを目的とするものが多い.それらの物が重ならない限り,物と物 との間に隙間があっても,計画案として成立する.そのため空間計画と比べて計画 案の生成が容易である.例えば,室内での家具の配置を最適化する研究 [12, 16, 37] がそれにあたる.また,独立した空間の配置計画では,[19] が対話型遺伝的アルゴ リズムによって定形のカード(矩形)のレイアウトを,[33] が有向グラフと対話型 遺伝子アルゴリズムを用いて大きさが可変の矩形の位置を決定する研究を行って いる.ビン・パッキング問題
本研究で扱う空間計画に似た問題としてビン・パッキング問題 [67, 68] やパレタ イジング問題 [63] が上げられるが,ビン・パッキング問題の目的はできるだけ隙 間を少なくし多くの物を詰め込むことである.この問題は物の向きと位置の最適 化を行う.詰め込む物の大きさと形状が固定される点が本論文で扱う問題にない 制約である.対角
2
座標を設計パラメータとするモデル
上述の空間配置案作成の研究以外に,矩形の部屋の対角 2 座標を設計パラメー タとするモデル化も容易に考えられる [22](図 2.4).しかし,この方法では部屋 同士の部分重複や部屋間の隙間が生じやすい.それらのような間取りとして成立 しない個体は進化的計算(EC)において評価することができない.また,作成できる部屋形状が矩形に限られることも間取りの多様性が限られるため不利である. 図 2.4: 対角 2 座標によるアプローチを使用して作られた間取り例.例えば,居間 (L,黄色)の形と位置は点 L1 と点 L2 によって決定される.この方法は部屋の重 なりや部屋間の隙間が生じやすい傾向を持っている.
空間二分割によるフロア・プランニング
空間二分割の繰り返しによる方法 [38] で生成できる部屋の形状は矩形のみであ るため,この手法で生成できる空間案数は他の手法と比べて比較的少ないものと なる.この研究は寸法を持った空間計画を狙ったものではなく計算幾何学的研究 であるため,部分空間の大きさを定義する事は行っていない.現実の空間を計画 するためにはそれらの情報も別に付加する必要がある.グラフを用いた室配置
各部分空間をグラフのノード,部分空間の繋がりをグラフのパスと見立てるこ とで,グラフを用いた空間構成の分析手法に関する研究が古くから多数存在する [15, 43, 44, 48].しかし,グラフはトポグラフィー,つまり空間を抽象化して捉え ているため建築の間取りのような現実の2次元や3次元の空間を直接的に表現し ているわけではない.そのためグラフを用いて空間の計画を行うことは一般に困 難であると言える. そこで [35] は直交グラフを用いることでグラフでも室配置を表現している.直 交グラフでは,部屋の境界となる壁をグラフの辺,壁の交点をグラフの点として平面グラフを構成し,各点の座標によって部屋の寸法が決定される.この論文で は進化的計算手法ではなく希求水準法 [42] を用いた多目的最適化によって直交グ ラフを決定し,その室配置を設計者が直接的にグラフの角点を修正する「対話型」 の繰り返しによって室配置の最適化を行っている点も本論文とは大きく異なる点 である.[10] は矩形双対グラフを用いて区画配置の最適化を行っている.矩形双 対グラフは,矩形領域の配置問題において各配置要素間の隣接関係を効率的に扱 うために Kozminski ら [30] によって導入された方法である.計画範囲を隙間無く 区画することが出来るが,生成される部分空間は矩形のみでその大きさも制限さ れる.
L
システム(木構造)による間取り計画
玄関を根として各部屋の関係性を記述した木と各部屋に該当する矩形空間を準 備し,その木の関係性に従って玄関から順に計画範囲に部屋を配置していく.こ の方法では各部屋の関係性や動線に問題がない間取りが生成できる.一方でそれ 以外の間取りは生成できない.また部屋の形状も予め準備したものに限定される.設計資産(データベース)よるプラン作成
[31] は過去の設計事例(設計資産)による設計事例データベースから概念設計 (空間の接続関係)を検索し,それを基に基本設計を行う.次に室面積データベー スから各室の面積を割当て最終的な平面プランを得ている.設計資産(データベー ス)を利用するため室接続関係が良好なプランが得られるが,各室に面積を与える 段階で室接続関係が失われる場合があること,部屋形状は矩形のみであること,計 画する敷地の形状も単純なもののみに限定されること等,解決すべき課題がある.独立建築計画最適化
セルの成長によって部屋空間を作成し,独立住宅の間取りを最適化する研究 [62] は,本研究に最も近い研究と言える.異なる点はまずセルの増殖ルールを 1 方向 ずつ遺伝子で指定していることである.本研究のような基点(種)の位置関係で 空間の境界を決定するものではないため,部屋形状のまとまりが不利であり,ま た部屋間に隙間ができることなどの課題がある.次に最適化する部分が室形状最適化と動線・室配置最適化の多重ループの構造になっている.最適化する部分が 二重になっていることで,一方の最適化が進んだとしても,もう一方に変化があ ればその最適化が意味をなさないことなる.目的の評価関数の設定では本研究と 共通する点が多いが,最適化においてはパレート・アプローチによる多目的最適 化ではなく複数の目的を単目的に統合した評価関数を用いている点が異なる. [54] はゾーニング配列→クラスター配列→室配列と言う風に空間の大きさを段 階的に小さくし計画していくことで,建物全体の形状がまとまりやすく,部屋間 の関係性も保ちながら間取りの計画を可能にしている.これにより実用的な間取 り案が作成できている.しかし空間の形状は目標面積に合致する矩形パターンの 組み合わせである.そのために部屋間に隙間が出来ることがあり,その場合の隙 間は廊下として利用するなどの調整を設計者が手動で行うようである.各段階で 計画範囲に部分空間をパッキングできるかの全数探索検索を行い,条件に合致す るかをチェックしている.全数探索を行っているため条件によっては高い計算コス トを必要とし,条件を厳しくすれば計算コストを抑えることは出来るが得られる 間取りのパターンが限定されるというジレンマが存在する.また,矩形以外の平 面の部屋が出来ない.このシステムは設計支援システムであるので最終建築計画 (間取り)案の作成には設計者が空間の調整を行っている. [59] は,各階の平面を 3×3 の室ユニットとし,3 次元室配置システムによって 3 階建て住宅計画を行っている.ユニット数を限定したことで計画のバリエーショ ンは限られるが,複数階の計画を目標にした点を今後の研究の参考にしたい. 独立建築(病院)の平面計画の研究 [21] では,部屋を定形としてその配置のみ によって計画を行うため,部屋の形状を自由に変化することができないという制 約がある. [25] は,正方形のセルをモジュールとし,そのセルを複数用いて部屋とする.セ ルの成長に関する染色体は成長進行方向の組で構成される.オフィスとすること が出来る部分を限定し,その範囲を分割することで計画を行っている.
集合住宅(配置)計画最適化
[64] では計画範囲をグリッド状に切り,集合住宅の 1 住戸を 1 つのセルに割り当 てている.集合住宅全体の形状をまとめる仕組みが無いままでセルを独立した状 態で住戸を割り当てると探索空間が広くなりすぎると思われる.そのため集合住 宅全体の形状がまとまり難いために,一般的に利用できるような計画案が得られていないようである.[20] も集合住宅の 1 住戸を 1 つのセルに割り当て,各セルの ポテンシャルをリカレントな関数として設定,最適化することで集合住宅の計画 を行っている. [53] の研究では,正方形のセルをモジュールとし,そのセルを複数用いて部屋と する.遺伝子型は開始点からセルの辺の進行方向とその距離で構成され,長方形 以外の自由な記述が可能である.最適化は EC を用いている.セルの一辺を隣接す る部屋との出入り口として接続することで間取り全体を構成する.よって間取り の中に隙間が出来易く,間取りの輪郭,つまり建物全体の形状も矩形にまとまり 難い.敷地に余裕のある独立住宅の計画であれば問題はないであろう.
多目的土地利用計画
[34] は多目的土地利用計画への遺伝的アルゴリズムの応用を行っている.建築計 画とは対象のスケールが異なる点や空間の形状は変えずにある一定のエリアの利 用を割り当てる点が本研究とは大きく異なる.大規模集積回路のフロア・プラン問題
大規模集積回路(VLSI,または LSI)のフロア・プランニングも盛んに行われ ている研究テーマのひとつである. [41] は通常のビン・パッキング問題と同様の方法,つまり水平・垂直制約グラフ を用いて部分空間の位置を決定し,矩形空間を計画範囲内にパッキングしている. よって作成できる部分空間の形状は矩形のみで計画範囲内に隙間も生じる.[49] は, 最初に計画範囲を定めず,一定の条件下で必要なモジュールをプランニングする. よって空間全体の形状は一定でなく,その中にデッドスペースも生じる.[58] では, 初期配置,自由空間バランス,コンパクション,形状変更,配線領域割当,アス ペクト比調整の順にフロア・プランを行う.これも作成できる部分空間の形状は 矩形のみで計画範囲内に隙間も生じる.[65] は必要な回路モジュールを矩形で配置 するのではなくフレキシブルに変形させて配置することで LSI 全体をコンパクト 化している. 建築計画とは目的,条件,スケールなどが異なるが,必要な部分空間を目的に 合わせ,かつ無駄な空間を最小化しながら配置する点など共通する事項が多い.EMO
への
IEC
の導入
[26] では EMO と IEC とを組合せて EC を行うことでユーザ評価に伴う疲労軽減 について実験・研究を行っている.[3] では実験のタスクとしてフロア・プランを 取り上げているが,各部屋の2方向の寸法を最適化しているだけであり,部屋の 位置は一定である.研究の目的は多目的対話型遺伝的アルゴリズム(多目的 IGA) とパラレル対話型遺伝的アルゴリズム(パラレル IGA)等の提案と評価であり,部 屋の最適化問題ではない.[56] は多目的フィットネス値空間上で参照点をユーザが 指定することによる「対話型」によって進化的多目的最適化の探索を有効に行う という試みである.本研究は表現型(計画案)に対する評価を「対話型」として いる点で異なる.[2] は 80,160,240,400,560,800 世代で個体の表現型と目的 値を表示し対話型プロセスを GA に割り込ませることで航空機設計を行っている.本研究の独自性(まとめ)
• 部屋(部分空間)の形状が計画対象に適した,まとまりのあるものが生成で きる. • 部屋の位置,大きさが計画対象に応じた自由度で変化できるものとする. • 計画範囲に無駄な隙間が生じ難いものとする. • 間取りの現実性と自由度をもった多様性の両方を求める. • 空間計画を進化的多目的最適化する. • 対話型進化的計算を導入することにより,予め設定した定性的要素以外の ユーザの持つ定性的要素も最適化する.3.1
アルゴリズムの提案
3.1.1
空間生成アルゴリズム
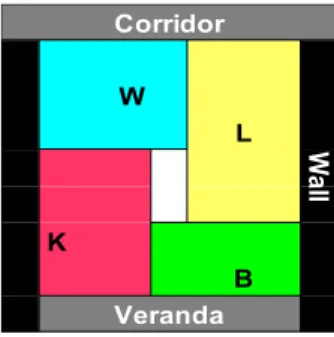
第 1 章で述べたこれまでの研究では困難であった以下の 2 点を目指した空間生 成アルゴリズムを提案する. 1. 計画する部屋の大きさ,形状,位置が可変 2. 無駄な隙間が少ない 空間二分割の繰り返しでは隙間無く計画範囲を分割できるが,部分空間の形状 は矩形に限定される [38].矩形のみの間取りではパターン数が少なく,建築計画に は不十分である.そのため本研究では成長アルゴリズムによる空間分割を提案し ている.直線以外の線分で計画範囲を分割すれば,矩形以外の形状の部分空間が 隙間無く計画できる可能性はあるが,提案の成長アルゴリズムより複雑なアルゴ リズムと遺伝子コーディングとなることが予想される.成長アルゴリズムはその 仕組みや染色体がシンプルでスキーマも EC にも適していると考える. 次にアルゴリズムの概略を述べる.まず,各部分空間(本論文の場合は部屋)の 成長開始座標点である「種」を計画範囲空間に配置する.次に,種から近い距離 の点(本論文の場合はセル)の集合をその種の部分空間とする.距離の定義とそ の測定ルール,及び種座標を制御することで空間配置案生成を行う. 建築間取り案生成に応用する空間生成アルゴリズムを以下に示す.ここでの空 間は離散化されたセルで構成されているものとし,座標と距離はこのセルで表わ す.種座標からの距離に基づいて部分空間を徐々に形成することを,本論文では 「成長」と表現している. 1. 各部屋の成長開始点(種)を m× n セル上へランダムにあるいは知見に基づ いて初期配置する. 2. 各部屋を隣接セルへ成長させる. 3. 成長方向に他の部屋や壁などの障害物がある場合はその方向へは成長しない. 4. 上記 2 と 3 を成長できなくなるまで反復する.このアルゴリズムは,セルラ・オートマトンにヒントを得たものである. この空間生成アルゴリズムを部屋の間取り作成支援システムへ応用する場合,部 分空間が部屋に,全体空間が居住空間になる.図 3.1 はアルゴリズムに基づいた部 分空間の成長過程の概要を示す. 図 3.1: 提案アルゴリズムに基づく建築間取りの成長過程の例.成長の順序は上段 の左から右へ,そして下段の左から右へと進む.L,K,W,B は居間,台所,水 廻り,寝室を表す. 提案の空間生成アルゴリズムを今後改良していくための理論的背景として,ボロ ノイ図との類似性の視点から提案アルゴリズムを解釈することが有用であると思 われる.本アルゴリズムで形成される部分空間は種座標に支配されるので,離散ボ ロノイ図,長方形ボロノイ図 [51] に近い性質を持っている.ボロノイ図も growth model による解釈が可能 [51] であり,本空間生成アルゴリズムの各部屋(空間)を 逐次的に成長させることは,このボロノイ図の性質に矛盾するものではない. ボロノイ図は母点からの距離によってボロノイ領域を定義するため,その領域 形状は距離の定義に依存する [51].今後の展開として逐次成長ではなく,ボロノイ 図のアルゴリズムで間取りを一括生成する場合は,ボロノイ図の視点から生成形
状が解析できる.例えば,市街地距離を用いれば部分空間の境界線は水平・垂直 だけでなく 45 度や 135 度などのものにすることができ,Karlsruhe 距離を用いれ ば部分空間の境界線はある中心から出る放射線と円弧の組合せにすることができ る.更には線ボロノイ図などを使用することも考えられる. また,逐次成長させる本空間生成アルゴリズムでの成長速度は,ボロノイ図で の距離に対応すると考えられる.例えば,本論文の実験で行ったような一律の成 長速度はメッシュ空間の市街地距離に相当すると考えられる.種座標間の距離に 応じて,あるいは,他から成長して来る生成空間との隙間距離に応じて成長速度 を制御するなど,将来複雑な成長ルールを導入した場合でも,対応するボロノイ 図の距離の観点から考察することで生成される空間形状が理論的に解析できる可 能性がある. 母点からの距離で支配空間を決定するボロノイ図は,計画範囲を隙間無く,部 分空間の位置,大きさ,形状を,計画対象に適した範囲で,自由に計画できる.こ れは成長アルゴリズムの特徴に酷似し,同位であるといえる.そのため研究の今 後の発展のためにもこの件について記述した.
3.1.2
成長ルール
第 3.1 節の空間生成アルゴリズムの枠組みの下で,部分空間の成長形成方法(成 長の方向,順序,成長量,他の部分空間との衝突時の成長制限方法など)を記述 したものが成長ルールある.前節の空間生成アルゴリズムがいろいろな分野の空 間配置問題に対する1つの共通思想を定義しているのに対し,成長ルールは空間 配置の応用問題毎に,部分空間の成長形成の方法を設計しておく点が異なる. 距離定義と種座標からの距離計測方法によっていろいろな部分空間形状が形成 できる他,成長方法や他部分空間との衝突対処法でいろいろな形状生成が可能に なる. 成長方法には,例えば次のような例が考えられる. • 4 方向のうち n (=1, 2, 3, or 4) 方向ずつ順に成長させる場合, • 斜めセル方向に成長させる場合とさせない場合, • 各部分空間が同時成長する場合と順に成長する場合, • 成長速度が全部分空間で同じ場合と部分空間毎に異なる場合,• 成長速度が全ての成長方向で同じ場合と方向毎に異なる場合,など. また成長してくる他の部分空間に接した時の対応にもいろいろな対処処理が考 えられる.大別すれば, • 成長方向に障害物がないセルのみ成長を続ける場合(図 3.2 左), • 上下左右の成長方向の内2つの合成方向つまり角方向を含む一部分でも障害 物がある時にはその方向の成長を全ての部分空間のセルについて止める場合 (図 3.2 中央), • 上下左右の成長方向の内2つの合成方向つまり角方向に障害物があり,その 2方向のどちらかに障害物がない時に,その一方のみの方向に成長する場合 (図 3.2 右) などの処理が考えられる.この処理によって部分空間の間に隙間が生じること,部 分空間が正方形や長方形以外の不整形状になるなどの現象がそれぞれ生じる. 図 3.2: 同じ種と異なるルールによる間取り生成例. このように成長ルールによって空間配置結果が異なるため,計画分野や要求仕 様によって成長ルールを調整したり修正したりする必要がある.建築間取り案作成 の場合の一般的な要求仕様では,生成する空間は矩形を基本とし,その一部が欠け た L 字形や十字形などの形状までにしたいと言うものが考えられるが,成長ルー ルはそれらの部屋形状が生成可能となるように調整及び修正をする必要がある. 以上を踏まえ,本論文での建築間取り案作成で用いる成長ルールを次のように 設定する.
• 各部屋は同時ではなく順に成長する. • 各部屋の成長方向について, – 上下左右成長方向の各々の隣接セルに障害物や他の部屋がなければ,そ の方向へ成長できる. – 障害物や他の部屋がある場合はその方向への成長をここで終える. – 既に成長した隣接する上下左右方向の合成方向である斜め方向につい て,もし障害物や他の部屋がなければ,成長する. 成長に順序があることについて,成長が同時であれば部分空間の成長に衝突が 生じる場合が生じる.この衝突の回避のためにはどちらの部分空間をそこへ成長 させるかの「優先順位」を決める必要が出てくるが,今回採用している成長順序 がその優先順位と同位であるとも言える.次に,成長順序をランダムにしなかっ たのは,一つの染色体が常に一つの間取りを生成するという対応関係を重視した ためである.なお,成長順序を染色体に組み込むことは発展研究として可能性が あると考えている.
3.1.3
実験で用いた成長アルゴリズムと成長ルール
実験で用いた成長アルゴリズムと成長ルールの Problem Analysis Diagram(PAD) [11] を図 3.3 で示す.本研究は主に建築の部屋を目標にしているため,部屋の形状 が矩形(正方形,長方形)を基本とし,計画範囲に隙間が出来にくくするために 矩形の角が欠けた L 字形や凸形などまでを許容するものとして成長ルールを決定 している.上下左右ごとに方向フラグを設定し,成長方向ごとに1つでも障害物 に当たればその方向の成長を止めることにしている.このことで部屋の境界線が ジグザグにならず部屋の形状が矩形になりやすくなる.斜め方向(角)を上下左 右方向と分けて処理することによって矩形以外の形状を作ることができる.
図 3.3: 実験で用いた成長アルゴリズムと成長ルールの PAD.
3.1.4
遺伝子コーディング
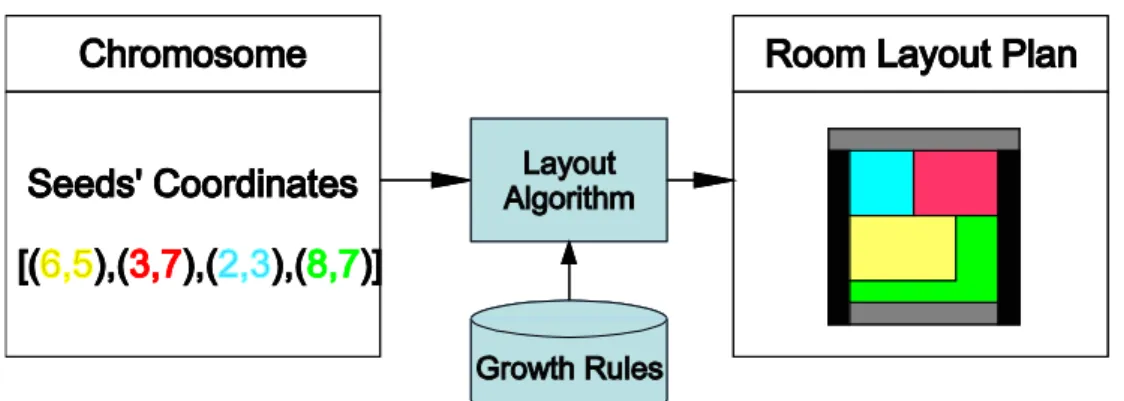
本研究では EMO によって間取りの最適化を行うため,各部屋(部分空間)の種座 標の集まりを染色体と定義する.例えば,図 3.1 左上の染色体は [(6,5),(3,7),(2,3),(8,7)] のように表現される.なお,図の左上を原点とし,下方向の座標, 右方向の座標の 順に部屋数分の座標組を記述している.染色体と間取りとの関係を図 3.4 に示す. 成長アルゴリズムと成長ルールが一つの染色体から一つの間取りを生成する.3.2
空間生成アルゴリズムの実験
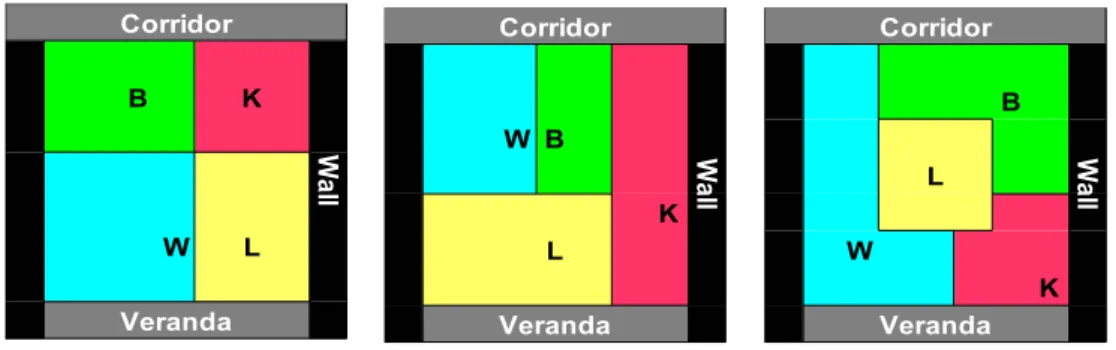
各部屋の種座標をランダムに生成し,提案アルゴリズムと成長ルールで部屋を 成長させて得られた間取りの特性を観察する [22].これは図 1.3 の空間配置案生成 部(上部)出力であり,まだ最適化部処理は行われていない.提案のアルゴリズ ムと成長ルールが間取りを生成できるかを確認することがここでの目的である. 観察によると,生成される部屋の形状は基本的に長方形や正方形であり,さら に L 字形,凸形,十字形などの四角形の角の一部が欠けた形状の部屋も作成でき る(図 3.5). 図 3.5: 生成された様々な形の部屋の例(最適化前). 間取りにはそれほど大きな隙間を作ることがない.隙間ができる場合でも,幅 1m 程度に留まっている(図 3.6).止まってしまった成長方向には再度成長しない という成長ルールによってこの隙間は生じている. 隙間の生じる頻度は少なくサイズも小さいので,建築計画支援システムには問 題のないレベルである.さらに必要であれば成長過程終了後に隙間を埋めるプロ セスを導入することも可能であろう.図 3.6: 部屋間に生じた隙間の例. 部屋座標(種)の重なりがある場合,間取りにおいて現れない部屋が生じる(図 3.7).必要な部屋数を確保するためには,部屋の成長開始点(種)座標の生成時 にシステムは部屋座標の重なりの有無を確認する必要がある.部屋形状が L 字形 の場合,建築計画的に見て細く長くなりすぎることがある(図 3.1 の右下).これ を回避するためには,あるステップで成長を止める必要がある. 図 3.7: 種座標が同じ(重なる)場合は必要な部屋数 n が生成されない.この例で は水廻り(W)と台所(K)が重なっているため,台所が間取りには現れていない. 本空間生成アルゴリズムと成長ルールでは,長方形の単純な組み合わせの間取 り,他の部屋で囲まれた島状態で計画範囲の端の障害物に接していない部屋を持 つ間取り,L 字形の部屋を持つ間取りも生成できる(図 3.8).しかし“「」”のよ うな L 字形の向かい合った組み合わせは生成できない [22].
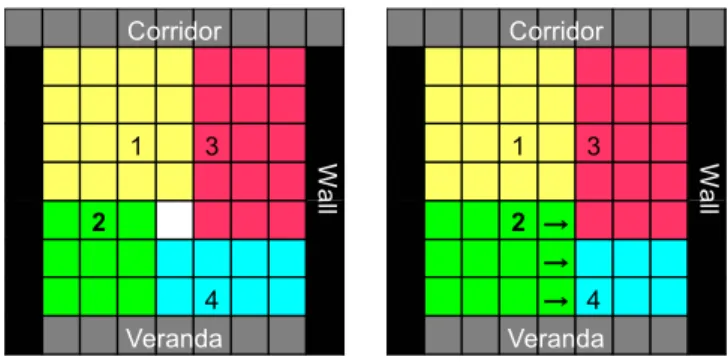
図 3.8: 正方形や長方形の部屋で構成される間取りの例(左と中央)と計画範囲の 境界に接しない島状の部屋がある間取りの例(右). 空間配置案生成部には,間取り案を制御する 3 つの要因,つまり部屋種座標の初 期値,成長順序及び成長速度がある.部屋種座標の初期値は,部屋の配置と位置 決定において支配的な要因である.また部屋の種の位置関係が部屋の大きさを決 定している(図 3.9).どの部屋から成長させるかの成長順序も生成間取り案に影 響を及ぼす.今回の間取りの基本設定で,間取りの最小単位であるセルは 1m 単位 の離散データである.そのため種の間のセル数が奇数である場合は,当然このシ ステムはその中央(セルの中)に境界線を引くことが出できない.この場合どち らか一方の部屋がそのセルを埋めることになる.そこで複数の部屋の間には優先 順位が必要となる.優先順位つまり成長ステップの順序が,競合する位置にある セルがどちらの部屋になるかを決定する要因となっている(図 3.10).なお,セル の最小単位をもっと細かいものにすれば,近似的ではあるが,各部屋の成長プロ セス順序をなくし同時とすることもできる.成長速度は,主に部屋の形状に影響 を与える.矩形だけでなく L 字形や凸形などの部屋生成を可能にし,また制限す ることもできる.成長プロセスにおいて,次の成長方向に障害物や他の部屋があ る場合,実験で用いた成長ルールは,それ以降のその方向への成長を止める.こ の部屋形状への制約は,隙間が生じる要因にもなっている.成長ルールの例外処 理や時間的な変更によって隙間を回避できることもある.
図 3.9: 部屋の種座標のわずかな違いが異なる間取りをもたらす.左図の種 2 が右 方向に一つ移動することにより,右図では 2 と 4 の部屋の大きさが変わり,隙間が 無くなっている. 図 3.10: 間取り生成における成長順序が異なれば異なる間取りを生成する.図中 の数字は成長順序を表す.左図における種 3 と 4 の順序を右図では逆にすること で,部屋 3 と 4 の大きさが変化し隙間が無くなっている. このアルゴリズムを用いた間取り生成では,個体の持つべきデータは種座標だ けであり(第 3.1.4 節),部屋の寸法や向きに関する情報は不要である.そのため, 第 4 章の EC 手法による最適化時には,染色体の情報量を比較的少なくすることが できる. 各セルの部屋割当ての組合せ数,つまり間取り総数について,次の 3 種類の方 法で検討を行う. 1. 7× 7=49 のセルをそれぞれ独立にランダムに 4 種類の部屋に割り当てる場合 の,組合せ数は 449(; 3.17 × 1029) 通りになる.
2. 7× 7=49 のセルを一つの空間として二等分して行きそれを 3 回繰り返し 4 つ の部屋を作る(正方形と長方形のみ)場合,文献 [38] では,その間取り総数 は 49,344 通りである.これは同じ条件である 7×7=49 のセルの場合で,分割 パターンと線引きの選択数より次の通り算出した.(6C3× 2 + (6C2×6C1)× 18 + (6C1×6C1×6C1)× 2 − (6C1×6C1))× 4! =49,344. 3. 7×7=49 のセルの中に 4 種類の種の取り得る組み合わせ数は49P4 = 49×48× 47× 46 = 5, 085, 024 通りである.これにさらに成長させる部屋の順序を考慮 すると,4 部屋の場合は 4!=24 通り乗算され,122,040,576 通りとなる.ただ し,本提案アルゴリズムでは種座標の組合せが異なる場合でも同じ間取りに なることがある(図 3.11)ため,生成され得る間取りの総数は 122,040,576 通 りよりも少ない.実際のパターン数は計算か実験により確かめる必要がある. 図 3.11: これら左右 2 つの間取り図の種座標は異なるが,種間のバランスが同じ であるため,同じ間取りが生成されている. 以上の間取り総数を表 3.1 にまとめる. 表 3.1: 間取り総数 独立セル・ランダム 449通り 二分割手法[38] 49,344通り 本提案手法 122,040,576通り未満 提案アルゴリズムと成長ルールは計画する空間配置問題に必要な部分空間の形 状を作成することができ,さらに最適化を行う探索空間を有効に限定することが できるため空間配置案生成にとって有用である.
3.3
間取り計画への応用
空間計画は様々な分野にわたるが,本論文では建築計画(間取り案の作成及び その最適化)を扱う.具体的には,1m× 1m のセルを最小単位(モジュール)と し,集合住宅(例えば図 3.12 のような)の 7m× 7m と 12m × 7m 住戸の間取り案 を作成することとする(図 3.1).住宅は建築の代表的なものであり,建築計画研 究の題材として相応しいと考えるからである.そして集合住宅の住戸のような限 定された範囲内に隙間無く部屋を計画することは敷地に建つ独立住宅の計画より も難しく,もしこの条件で計画できるのであれば独立住宅も可能であると考える からである. 図 3.12: 集合住宅と住戸の間取り例.左図は,国土交通省 WEB ページより「スケ ルトン・インフィル (SI) 住宅」[28](※図とモデルの縮尺は異なる) 日本の伝統的家屋建築では,メートル単位(1,000mm)ではなく三尺 (910mm など) を最小単位とする事も多いが,本論文では現代的な集合住宅の住戸を扱うの で 1m を最小単位とした.この単位は計画対象や計画コンセプトに応じて様々に設 定できる. 一般的な鉄筋コンクリート造では 7m× 7m が経済的にも理にかなったもの(経 済スパン:スパンは平面における構造体のピッチ,または柱間の距離)と言われて いる.一級建築士の資格試験・設計課題の対策においても 7m×7m を基本と指導し ている事が多い [29, 70].実際の設計では状況に応じて多少の変動はあるが,本論 文での問題設定もこのスパンを用いる.なお,7m× 7m の間取りの場合の共同通 路とベランダのスラブ(床)は片持ち梁によって支持するものとする.12m× 7mの間取りの場合は 7m× 7m スパンを 2 つ並べ,共同通路の 2m 幅のスラブはスパ ン内とし,ベランダのスラブは片持ち梁での支持とする. 本論文ではこの住戸内に居間,台所,水廻り,寝室の 4 部屋の場合と更に寝室 を 2 室と住戸内廊下を加えた場合の 2 通りの配置案を作成する.どちらの場合に おいても計画範囲の周囲は,平面図の上方向が北とすると,北側を共同廊下(玄 関側),東西側を隣接住戸の壁,南側をこの住戸のベランダとする.この周囲は空 間生成アルゴリズムにおける成長の限界点(障害物)としての機能も果たす. 各部屋の境界は壁を意味する.実際の建築ではその壁に出入り口や窓などを設 置する必要があるが,本論文の間取り案作成支援システムではそれらの具体的な 位置の決定は行わない.また本システム上では壁の厚みも表現していない. 提案の空間生成アルゴリズムと成長ルールが各部屋の成長開始点「種」からそ れらの部屋を障害物(他の部屋と住戸の周囲)まで成長させることで,種の初期 座標を中心にした部屋の形状,大きさ,位置を決定する.
![図 1.1: VIA Nano Processor[66].](https://thumb-ap.123doks.com/thumbv2/123deta/6429474.644482/10.892.339.553.761.971/図-via-nano-processor.webp)
![図 1.2: スケルトン・インフィル住宅(SI住宅)[28].国土交通省の普及促進す る集合住宅のあり方で,建物のスケルトン(柱・梁・床等の構造躯体)とインフィ ル(住戸内の内装・設備等)とを分離した工法による共同住宅.インフィル部分 の個々の計画ニーズが見込まれる. 1.1.2 従来の問題点と課題 (a) 間取り生成 空間配置案作成支援システムを設計するには,まず空間構成をどのように表 現するか,つまりモデル化が必要である.建築間取りの分野でもこれまでい ろいろなモデルが提案されてきた [43, 44,](https://thumb-ap.123doks.com/thumbv2/123deta/6429474.644482/11.892.236.656.156.342/スケルトンインフィルスケルトンインフィインフィルかつまり.webp)
![図 2.1: ボロノイ図 2.1.3 進化的多目的最適化 EMO の概要 進化的計算(EC)[14, 27, 60] では単目的を最適化するものが一般的であった. しかし近年は多目的の最適化を目標とする進化的多目的最適化(EMO)の研究が 進んできている.特に工学や計画設計分野における問題の最適化への EC 応用を 目標とした場合,その分野での問題は目的が複数存在するものがほとんどである ため,EC を用いて最適化を行う必要があれば EMO 手法を導入することは必然だ と言える. EMO の手法 具体的な](https://thumb-ap.123doks.com/thumbv2/123deta/6429474.644482/21.892.290.602.148.418/ボロノイしかし進化多目最適EMOおけるするものほとんど言える.webp)
![図 2.2: Fonseca らによるパレート・ランキング法 [7].点 A∼H は個体を,丸括弧 内の数字はその個体のパレート・ランクを表す.ここでは目的関数値 f 1 ,f 2 が最 大となるほど最良としている. 一般に多目的最適化では一つの最適解を求めるのではなく,多様なパレート最 適解を求めることが目標とされている.EMO によって得られた多様な解を案とし てユーザに提示することが本研究システムの目的である.それを最終的な解とし て絞り込むことは計画における次のステップである. MOGA の適応度](https://thumb-ap.123doks.com/thumbv2/123deta/6429474.644482/23.892.295.600.190.480/パレートランキングパレートランクパレートシステム絞り込む.webp)
![図 3.3: 実験で用いた成長アルゴリズムと成長ルールの PAD. 3.1.4 遺伝子コーディング 本研究では EMO によって間取りの最適化を行うため,各部屋(部分空間)の種座 標の集まりを染色体と定義する.例えば,図 3.1 左上の染色体は [(6,5),(3,7),(2,3),(8,7)] のように表現される.なお,図の左上を原点とし,下方向の座標, 右方向の座標の 順に部屋数分の座標組を記述している.染色体と間取りとの関係を図 3.4 に示す. 成長アルゴリズムと成長ルールが一つの染色体から一つの間](https://thumb-ap.123doks.com/thumbv2/123deta/6429474.644482/38.892.154.759.185.793/アルゴリズムコーディング間取り集まり間取りアルゴリズムルール.webp)