目次
第 1 章 序論 1.1 背景 1.2 研究目的 第 2 章 圧電リニアアクチュエータ( SPIDER )駆動精密ステ-ジシステムの概要 2.1 SPIDER駆動ステージの概要 2.2 SPIDER駆動ステージの動作原理 第 3 章 精密ステージシステムに対する可変忘却要素を用いた適応同定法 3.1 可変忘却要素(VFF)を用いたRLS(逐次最小二乗)法アルゴリズム 3.2 可変忘却要素に基づく適応同定 3.3 VFF-RLSのSPIDER駆動ステージへの応用 3.3.1 スティックスリップ現象 3.3.2 bang-bang制御を用いた摩擦補償法 3.3.3 可変忘却要素に基づく摩擦補償法 3.4 まとめと考察 第 4 章 精密ステージシステムのモデル予測制御法 4.1 モデル予測制御法の基本概念 4.2 モデル予測制御(MPC)の精密ステージへの適用 4.2.1 予測式の導出 4.2.2 シミュレーションモデル 4.2.3 モデル予測制御系の設計 4.2.4 実験結果 4.3 一般化予測制御(GPC)の精密ステージへの適用 4.3.1 予測式の導出 4.3.2 シミュレーションモデル 4.3.3 一般化予測制御系の設計 4.3.4 実験結果 4.4 まとめと考察 参考文献 謝辞第
1
章
序論
1.1
背景
近年, 半導体製造技術は急速にその高度化が進められている。国際半導体技術ロードマッ プ(ITRS)2004では45 nmノードまでは光源に ArF(波長193 nm)を用いた液浸技術で 達成され, それ以上微細なノードでは新技術が必要であり, ArF の対抗技術となる13.5 nm 波長の極紫外線(EUV)が利用されると発表された。このような ITRS 達成の鍵は半導体 露光装置であり, 微細化の解法には光源の短波長化とともに精密ステージの高度な制御技 術が大きく寄与している。 現在では, 次世代光源の一つとされる電子線(EB)露光に関する研究も進んできている。 これはEBを用いて, 回路パターンをウェハ上に描画していく方法である。EB露光自体は, 高い解像度が得られる方式として古くから知られ, 既にASIC(特定用途向けIC)に代表さ れる生産個数が少ない先端LSIの製造や次世代DRAM, MPUの研究開発用として, EB直接 描画装置は実用化・市販されている。しかし, 従来ステージ開発の分野で用いられてきたステッピングモータやリニアモータ
は磁気ノイズが生じるため, 電子ビームとの整合性が取れないという問題点がある。そこで 注目されているのが「非共振型超音波アクチュエータ(SPIDER:Synchronous Piezoelectric
Device drivER)」である。本アクチュエータの特徴は, 電磁力を用いないため磁気ノイズの
特性に優れており, 荷電粒子応用装置における動力源に最適である。しかし, 摩擦駆動方式 であるため摩擦変化の影響が大きく, 高速・高精度位置決めを実現させるためには摩擦補償 が必要不可欠となる。
1.2
研究目的
本研究では, 次世代超精密ステージ駆動用アクチュエータとして熊本県地域結集型共同 研究事業にて開発された非共振型超音波モータ(Synchronous PiezoelectricDevice driver:以
下ではSPIDERと略記)を用いて高精度位置決め制御の実現を目指す。同時に先に述べたよ うな次世代の超精密ステージに要求される制御性能の達成を目標とする。 SPIDERは独立行政法人科学技術信仰機構(JST)の支援により平成11年から平成16年 に か け て 行 わ れ た 「 熊 本県 地 域 結 集 型 研 究 事 業 」の 一 部 と し て 開 発 さ れ たも の で あ る 。 SPIDER駆動精密ステージは圧電素子をアクチュエータに用いるため, 磁気型のアクチュエ ータと違い, 電磁シールドを用いる必要が無く, 荷電粒子応用装置におけるステージ動力 源に最適となっている。反面, 摩擦駆動により駆動しているために摩擦補償が必要不可欠と なっている。 さらに現在では, 精密ステージに求められる位置決め精度はサブナノオーダ に達しており, これは, ほぼ計測分解能に一致する。よってエアスライドの極めて小さい摩 擦 力 で さ え 無 視 で き な い 領 域 に あ る 。 そ こ で 本 研 究 で は 以 前 か ら 研 究 が な さ れ て い る bang-bang 補償をはじめ, 速度情報が必要な従来の方法に対し, 速度情報に頼らない新たな 摩擦補償法として特性変化の検出が可能である可変忘却要素を用いた摩擦補償法を提案し, またアクチュエータの制約を考慮でき, パラメータの調整が容易で, 直感的であるという 利点をもつモデル予測制御(Model Predictive Control)(あるいはモデルに基づく予測制御
(Model-Based Predictive Control, MPC, MBPC)とも呼ばれる)を用いてセンサ分解能内への
より素早い位置決めを行うことを目的としている。 各章の構成は以下の通りである。 2章ではSPIDER駆動精密ステージの構成と動作原理について説明する。次に, 3章は「可 変忘却要素を用いた適応同定法」と題し, ステージを逐次的に同定し, その特性変化を検出 することで, 摩擦補償のタイミングを決めるという新しい摩擦補償法を提案する。加えて, bang-bang補償で構築した摩擦補償を更に発展させた形としてより高性能な位置決めが可能 であることを実験・検証する。ステージの位置決め目標は計測分解能内とし, 提案法を用い ることでより素早い位置決めを行うことが本章の目的である。 最後に, 4章では非線形性の摩擦を考慮したモデルにおいて摩擦補償つき最適制御系の構 築を目的にモデル予測制御, また一般化予測制御を導入し, その有効性を実験により検証 する。
第
2
章
圧電リニアアクチュエータ(
SPIDER
)
駆動精密ステージシステムの概要
2.1
SPIDER
駆動ステージの概要
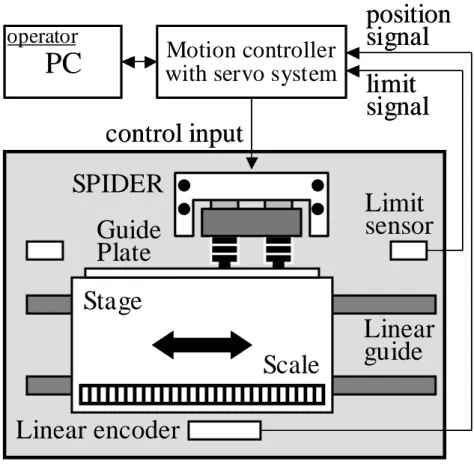
本研究で用いる実験装置の構成図を図2.1に示す。ホストPCから送られた入力指令はPCI スロットに装着したパラレルIOカードを利用して, サーボインターフェースユニット(モー ションコントローラ)を通してSPIDERに電圧として印加される。また, エンコーダとリミ ットセンサからはステージの位置及びストロークリミット信号が読み込まれ, モーション コントローラに送られる。ホストPCは, Visual C++によって制御プログラムを作成し, I/Fカ ードにはInterface Corporation製16/16 bit I/O PCIボードPCI-2753 を使用している。アクチュ エータを含むステージシステムはテックコンシェルジェ熊本, 太平洋セメント社等が参画 した共同研究開発事業により開発されたものである。SPIDERの外観の写真は図2.2に示す。 リニアエンコーダはミツトヨ製で計測分解能は電気分割ユニットのスイッチ切り替えによ り, 最小で10 nmが可能である(本実験ではアルゴリズムの構築という観点から主に100 nm を用いた)。制御入力となる圧電素子への最大印加電圧は±130 Vであり, 駆動周波数は1 kHz ~ 60 kHzの間で変更可能であり, ステージのストロークは約100 mmとなっている(4イ ンチウエハ対応)。圧電素子の特性については表2.1に示す。表に記載する通り, 静的な最大 伸縮素子発生力は4脚同時で660 N, 最大剪断素子発生力は4脚同時で1400 Nである。予圧力 は50 N, 摺動面の摩擦力は15 Nである。また, ガイドプレートの平均粗さが約0.2 µm(Ra 値)である事から伸縮方向に39 Vのオフセット電圧を加算することで表面粗さの影響を軽 減している。最大印加電圧等の仕様について表2.2に示す。 ここで電磁モータと比較した際のSPIDERの特徴を列記する。 1. 超音波振動を利用した摩擦駆動のモータである 2. 対象物を直接駆動できるため小型化できる 3. 位置決め応答などの制御性能が良い 4. 電磁ノイズを発生しない(磁気の影響なし) 5. 超小型, 薄型, 軽量, 構造が単純である このような特徴から, SPIDERは, 超小型化可能, 制御特性良好, 電磁ノイズがない, とい う電磁モータが不得意な用途への応用例が今後ますます増えると思われる。図2.1 ハードウェア構成図 図2.2 SPIDERの外観
Linear encoder
Linear
guide
Limit
sensor
SPIDER
Stage
Scale
PC
with servo system
Motion controller
control input
position
signal
operator
limit
signal
Guide
Plate
Linear encoder
Linear
guide
Limit
sensor
SPIDER
Stage
Scale
PC
with servo system
Motion controller
control input
position
signal
operator
limit
signal
Guide
Plate
20mm
preload mechanism
piezoelectric actuator
表2.1 圧電素子の特性 表2.2 SPIDERの仕様
660
×
10
-12m/V
Expand mode
7.8
×
10
3kg/m
3density
4(Shear mode)
×
4(Expand mode)
lay number
1010
×
10
-12m/V
Shear mode
6.0 mm
×
3.0 mm
×
0.6 mm
dimension [mm]
PB(Zr,Ti)O
3material
660
×
10
-12m/V
Expand mode
7.8
×
10
3kg/m
3density
4(Shear mode)
×
4(Expand mode)
lay number
1010
×
10
-12m/V
Shear mode
6.0 mm
×
3.0 mm
×
0.6 mm
dimension [mm]
PB(Zr,Ti)O
3material
• maximum voltage
:
±
130 V
• maximum displacement
:
0.5
µ
m
• drive frequency
:
25 kHz
■
Actuator
:
SPIDER
• scale resolution
:
20 nm
■
Sensor
:
linear encoder
• surface roughness(Ra)
:
0.2
µ
m
■
Guide plate
:
alumina ceramics
• stroke
:
100 mm
• postural change
: ±
7 s
(yaw/pitch)
■
Precision stage
• maximum voltage
:
±
130 V
• maximum displacement
:
0.5
µ
m
• drive frequency
:
25 kHz
■
Actuator
:
SPIDER
• scale resolution
:
20 nm
■
Sensor
:
linear encoder
• surface roughness(Ra)
:
0.2
µ
m
■
Guide plate
:
alumina ceramics
• stroke
:
100 mm
• postural change
: ±
7 s
(yaw/pitch)
2.2
SPIDER
駆動ステージの動作原理
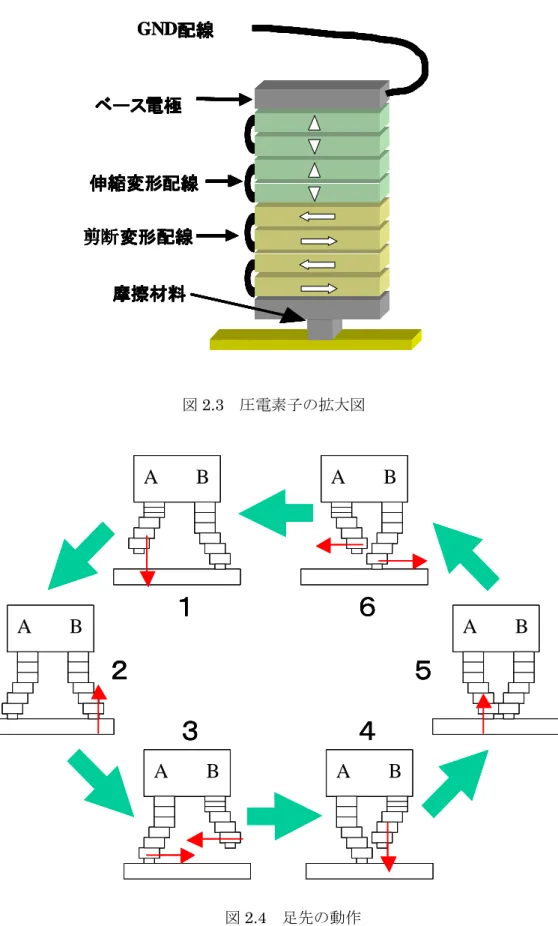
すでに述べた通り, 本研究で用いているステージ駆動用のアクチュエータ(SPIDER)は 圧電素子の積層化によって構成されている。この圧電素子に関しては二つの効果を得るこ とができる。一つは素子の変形によって電圧の発生する圧電効果, もう一つが電圧を印加す ることにより素子が変形する逆圧電効果である。本アクチュエータではこの逆圧電効果を 利用している。圧電素子に分極と同じ方向の電圧を印加すると縦に伸び横に縮む。また, 分 極と異なる方向の電圧を印加すると, 縦に伸び横に縮む。この二つの動作を組み合わせるこ とでステージを送り出すというものである。 実際に圧電素子を利用して作られるSPIDERの1脚を図2.3に示す。SPIDERの1脚は圧 電素子8層から構成されており, 脚を伸縮方向に変形させるための圧電素子と, 脚を剪断方 向(横方向)に変形させるための圧電素子がそれぞれ 4 層づつとなっている。ステージの 送り手順をより分かりやすく示したものが図2.4である。図中の番号はそれぞれ以下の動作 に対応している。ここで対となっている1方の脚をA脚, 他方をB脚とすると, 以下のよ うな動作を繰り返すことで足先が円軌道を描く。すなわち, SPIDER を固定し, ステージを 接触させればステージ送りが可能となるという原理になっている。 1. B脚の剪断部がステージの送り方向に変形(ステージ移動)。A脚はステージに接 していない状態でB脚と逆向きに変形する。 2. A脚の伸縮部が伸びステージと接触。 3. B脚の伸縮部が縮んでステージから離れる。 4. A脚の剪断部がステージの送り方向に変形(ステージ移動)。B脚の剪断部はステ ージに非接触状態のままAと逆方向に変形。 5. B脚の伸縮部が伸びステージと接触。 6. A脚の伸縮部が縮んでステージから離れる。 この一連の動作を行うにあたり, 印加電圧には正弦波状の電圧を用いている。伸縮部と剪 断部の位相差を90°, A脚とB脚の位相差を180°とすることで人間の歩行のようなスムー ズなステージ送りを実現している。また, 実際のSPIDERではA・B脚一対を4組とする計 8脚によりステージの送りを行っている。図2.3 圧電素子の拡大図
図2.4 足先の動作
摩擦材料
摩擦材料
摩擦材料
摩擦材料
伸縮変形配線
伸縮変形配線
伸縮変形配線
伸縮変形配線
ベース
ベース
ベース
ベース電極
電極
電極
電極
剪断
剪断
剪断
剪断 変形配線
変形配線
変形配線
変形配線
GND
配線
配線
配線
配線
摩擦材料
摩擦材料
摩擦材料
摩擦材料
伸縮変形配線
伸縮変形配線
伸縮変形配線
伸縮変形配線
ベース
ベース
ベース
ベース電極
電極
電極
電極
剪断
剪断
剪断
剪断 変形配線
変形配線
変形配線
変形配線
GND
配線
配線
配線
配線
摩擦材料
摩擦材料
摩擦材料
摩擦材料
伸縮変形配線
伸縮変形配線
伸縮変形配線
伸縮変形配線
ベース
ベース
ベース
ベース電極
電極
電極
電極
剪断
剪断
剪断
剪断 変形配線
変形配線
変形配線
変形配線
GND
配線
配線
配線
配線
摩擦材料
摩擦材料
摩擦材料
摩擦材料
伸縮変形配線
伸縮変形配線
伸縮変形配線
伸縮変形配線
ベース
ベース
ベース
ベース電極
電極
電極
電極
剪断
剪断
剪断
剪断 変形配線
変形配線
変形配線
変形配線
GND
配線
配線
配線
配線
A
B
A
B
A
B
A
B
A
B
A
B
1
2
3
4
5
6
A
B
A
B
A
B
A
B
A
B
A
B
A
A
B
B
A
B
A
B
A
B
A
B
1
2
3
4
5
6
A
B
A
B
A
B
A
B
A
B
A
B
1
2
3
4
5
6
A
B
A
B
A
B
A
B
A
B
A
B
A
A
B
B
A
B
A
B
A
B
A
B
1
2
3
4
5
6
第
3
章
精密ステージシステムに対する
可変忘却要素を用いた適応同定法
3.1
可変忘却要素を用いた
RLS
(逐次最小二乗)法
アルゴリズム
SPIDER駆動ステージの動特性は剛体の特性に加え, 摩擦駆動に起因した非線形特性も有 す る 。 す な わ ち, 系 全 体 と し て は 動 的 非 線 形 シ ス テ ム で あ る と い え る 。 し か し な が ら, bang-bang 制御に基づく簡単な構造の静止摩擦補償により, ある程度の制御性能が確保でき ることを考えると, 動的非線形性の影響は大きくはない。 ここでまずRLS(逐次最小二乗法)法の導出方法について述べる。 オンラインシステム同定に用いる入出力データを{
u(k),y(k):k=1,2,...}
(3.1) とし,この入出力データをARX(Auto-Regressive with eXogenous input)モデル) ( ) ( ) (k k k y = θTφ + ω (3.2) にフィッティングする。ただし, T n
b
b
a
a
,...,
,
,...,
]
[
1 2 1=
θ
(3.3) は同定すべき未知パラメータベクトルで, . )] ( ,..., ) 1 ( ), ( ,..., ) 1 ( [ ) ( T n k u k u n k y k y k − − − − − − = φ (3.4) は回帰ベクトルである。また,ω(k)は白色雑音であり, nはモデル次数である。 いま, システム同定のための評価規範として,∑
= −=
k i i k ki
i
J
1 2(
)
)
(
)
(
θ
λ
ε
(3.5) を用いる。ただし, ε(k)は時刻iにおける予測誤差である。このような評価規範を定義する ことによって, 未知パラメータθ の推定値(θˆ N( ))は決定される。ここでRLS法は = ∑ ∑ = − = N k N k T k k y k k N 1 1 1 ) ( ) ( ) ( ) ( ) ( ˆ ϕ ϕ ϕ θ
(3.6) まず, 行列P(N)を 1 1 ) ( ) ( ) ( − = = ∑N k T k k N P ϕ ϕ (3.7) とおき, これを共分散行列と呼ぶ。すると, ) ( ) ( ) 1 ( ) ( 1 1 N P N N N P− = − − +ϕ ϕT
(3.8) が得られる。同様にして, ) ( ) ( ) ( ) ( ) ( ) ( 1 1 1 N y N k y k k y k N k N k ϕ ϕ ϕ = ∑ + ∑ − = =
(3.9) (3.7)から(3.9)式を(3.6)式に代入して変形を行うと, 次のようになる。
{
( ) ( )ˆ( 1)}
) ( ) ( ) 1 ( ˆ ) ( ) ( ) ( ) ( ) ( ) ( ˆ 1 1 − − + − = + = ∑− = N N N y N N P N N y N k y k N P N T N k θ ϕ ϕ θ ϕ ϕ θ(3.10) (3.8), (3.10)式が RLS法であるが, (3.8)式中の P(N)をオンラインで計算すること は困難である。そこで, 逆行列補題を用いて, (3.8)式をオンライン計算が可能な形式に変 形しよう。ここで, 逆行列補題とは, ある正則行列Aに対して次式が成立することをいう。 1 1 1 1 1 1 ( ) ) (A+BC − =A− −A− B I +CA− B − CA−
(3.11) ここで, B, Cは適切な次元の行列(あるいはベクトル)である。 (3.8)式に逆行列補題を適用すると, 次式が得られる。 ) ( ) 1 ( ) ( 1 ) 1 ( ) ( ) ( ) 1 ( ) 1 ( ) ( N N P N N P N N N P N P N P T T ϕ ϕ ϕ ϕ − + − − − − =
(3.12) さらに, (3.10)式の右辺第2項に含まれるP(N−1)ϕ(N)は(3.12)式を用いると次のよう に変形できる。 ) ( ) ( ) 1 ( ) ( 1 ) ( ) 1 ( ) ( ) ( N N N P N N N P N N P T ϕ ε ϕ ϕ ϕ − + − =
(3.13) (3.13)式を(3.10)式に代入すると, ) ( ) ( ) 1 ( ) ( 1 ) ( ) 1 ( ) 1 ( ˆ ) ( ˆ N N N P N N N P N N T ϕ ε ϕ ϕ θ θ − + − + − =
(3.14) ただし,
) 1 ( ˆ ) ( ) ( ) (N =y N −ϕT Nθ N− ε
(3.15) このようにして導出された(3.14),(3.15),(3.12)式がRLS法である さて, 時変システムのパラメータ推定を行う場合, 過去のデータを指数的に忘却する方 法が有効である。これは現時刻k よりτサンプル以前の観測値に対してλτの指数重みをか ける方法であり, 評価規範 ∑ = − = N k k N N k I 1 2 ) ( ) (θ λ ε (3.16) を最小化することに対応する。ここで, λは忘却要素(forgetting factor)と呼ばれる1以下 の正数である。また, λ τ − = 1 1 (3.17) より過去の測定値に対する重みは約0.3より小さくなるため, このτはメモリホライズンと 呼ばれる。例えば, λ=0.995のときは, τ=200となる。すなわち, 200個以上過去のデー タに対する重みは, 0.3より小さくなり, それらのデータはほとんど利用されない。 ここでは, 剛体モードを動的線形システムに, また, 摩擦特性を静的非線形と考える。更 に, 摩擦の特性が静止・極低速・低速から高速で区分的に変化すると考えると, 忘却要素を 導入した RLS 同定法により各区分での高精度な同定が期待できる。また, 静止から極低速 への素早い区分変化と, それ以外の速度域での大部分の時間を占める駆動を考えると, 忘 却要素の大きさを可変とすることが有効であると推測できる。 すなわち, 速度域により区分的に変化する特性を可変忘却要素を用いた適応同定法によ り, 高速かつ高精度に同定可能であると期待できる。 そこで可変忘却要素を用いたRLS同定法のアルゴリズムを以下に示す。 Step 1: 予測誤差ε(k)の計算
)
1
(
ˆ
)
(
)
(
)
(
k
=
y
k
−
φ
T
k
θ
k
−
ε
(3.18) Step 2: ゲインK(k)の計算 ) ( ) 1 ( ) ( ) 1 ( ) ( ) 1 ( ) ( k k P k k k k P k K Tφ
φ
λ
φ
− + − − = (3.19) Step 3: パラメータ推定値θˆ k( )の更新)
(
)
(
)
1
(
ˆ
)
(
ˆ
k
θ
k
K
k
ε
k
θ
=
−
+
(3.20) Step 4: 忘却要素λ(k)の計算)
(
)
(
)
(
1
1
)
(
2 0k
k
K
k
k
Tε
φ
λ
=
−
−
∑ (3.21)ただし, min ) ( λ λ k < のときは,λ(k)=λminとおく。 Step 5: 共分散行列P(k)の更新
( )
=( )
1 [I −( ) ( ) (
k K k ]P k −1)
k k Pφ
Tλ
(3.22) なお, Step 4で∑0は追従速度を決定するパラメータである。∑0を小さくすると追従性が向上 し, 反対に大きくすると適応速度が減少する。また, λminは忘却要素の下限であり, このパ ラメータもユーザが設定する。Step 4からわかるようにε2(k)=0の時, つまり対象が定常状 態の時, λ(k)は1に近づき, ε2(k)>> 0の時, つまり対象が変動した時, λ(k)は1から自動 的に小さくなり追従特性を向上させる。3.2
VFF
‐
RLS
の
SPIDER
駆動ステージへの応用
特に静止摩擦の影響がどのように反映されるのかを目的とし, 特にステージの速度に着 目し以下の3通りの入力信号に対する同定実験を行った。 1. M系列信号(39V-65V):ステージ静止無し 2. M系列信号(0V-65V):ステージ静止あり, 単一方向へ移動 3. M系列信号(-32.5V-+32.5V):ステージ静止あり, 双方向へ移動 各実験での同定条件, 並びに同定結果を以下図3.1から図3.8で示し説明する。ここでは 比較のためオフラインLS同定結果の結果もあわせて示す。 1.のステージ静止なしの実験におけるオフラインLS 法による同定結果を図3.1 に, VFF ‐RLS法による同定結果を図3.2に示す。ここで同定条件はサンプリング時間0.5ms, 入力 は振幅39V-65VのM系列信号でオフラインLS法, VFF‐RLS法とも2次のARXモデル を使用している。図3.1における(a)はステージへの入出力データであり, (b)はコヒー レンス関数を表す。ここで, コヒーレンス関数とは, 系の入力と出力の因果関係の度合を示 すもので0から1の間の値をとる。コヒーレンス関数が1の場合は, その周波数において, 系 の出力がすべて測定入力に起因していることを示しており, コヒーレンス関数が 0 の場合, その周波数については, 系の出力は測定入力にまったく関係ないということになる。またコ ヒーレンス関数が0から1の間の値をとる場合は, 測定とは無関係な信号, 系の内部で発生 しているノイズ, 系の非直線性, または系の時間遅延などがあると考えられる。次に(c) は同定モデルの周波数特性を示し, (d)はオフラインLS法における実験出力とモデル出力 の比較を示している。図3.2における(a)は速度データ, (b)はパラメータ推定値, (c) は前節で示した可変忘却要素の変化を示し, (d)はVFF‐RLS法による実験出力とモデル 出力の比較を示す。ここで図3.1 と図3.2 の(d)より, 実験出力とモデル出力の一致度よ り, LS同定, RLS同定ともに良好な同定結果が得られていることがわかる。また, RLS同定 ではパラメータの初期値を全てゼロとしているため, 実験開始時の忘却要素が小さい値と なり, 積極的にパラメータの適応化を行っていることが確認できる。LS 同定でのパラメー タ推定値とRLS同定のパラメータ推定値(最終値)を比較すると, aパラメータ(分母情報) はほぼ一致していることが確認できる。 次に, 2.のステージ静止あり, 単一方向へ移動の実験におけるオフライン LS 法による同 定結果を図3.3に, VFF‐RLS法による同定結果を図3.4に示す。同定条件はサンプリング 時間0.5ms, 入力は振幅0V-65VのM系列信号でオフラインLS法, VFF‐RLS法とも2次 のARXモデルを使用している。図3.3における(a)(b)(c)(d)は1.実験と同じく, 入出 力データ, コヒーレンス関数, 同定モデルの周波数特性, オフライン LS 法における実験出力とモデル出力の比較を示している。同様に図3.4における(a)(b)(c)(d)は1.実験と 同じく,速度データ, パラメータ推定値, 可変忘却要素, VFF‐RLS法による実験出力とモデ ル出力の比較を示している。2.の実験結果であるが, ステ-ジ静止と極低速域の動作(非線 形性)が含まれるため, オフラインLS同定ではモデル出力と実験出力に誤差が見られる。 しかしながら, RLS同定では忘却要素の変化によりモデル出力は良く一致していることが確 認できる。 次に, 3.のステージ静止あり, 双方向へ移動の実験におけるオフライン LS 法による同定 結果を図3.5に, VFF‐RLS法による同定結果を図3.6に示す。同定条件はサンプリング時 間0.5ms, 入力は振幅-32.5V-+32.5VのM系列信号でオフラインLS法, VFF‐RLS法と も2次のARXモデルを使用している。図3.5における(a)(b)(c)(d)は 1.実験と同じ く, 入出力データ, コヒーレンス関数, 同定モデルの周波数特性, オフライン LS 法におけ る実験出力とモデル出力の比較を示している。同様に図3.6 における(a)(b)(c)(d)は 1.実験と同じく, 速度データ, パラメータ推定値, 可変忘却要素, VFF‐RLS 法による実験 出力とモデル出力の比較を示している。3.の実験も2.と同様に入出力間のコヒーレンスが高 いにもかかわらず, LS同定ではモデル出力に誤差が見られる。これに対し, RLS同定では双 方向への移動にも関わらず実験出力に良く一致していることが確認できる。 最後に, ステージが静止から動作へ変化する瞬間に摩擦特性が大きく変化するというこ とを考慮し, 同定入力に0Vをその基準とした矩形波信号を印加した時のオフラインLS法 による同定結果を図3.7に, VFF‐RLS法による同定結果を図3.8に示す。同定条件はサン プリング時間0.5ms, オフラインLS法, VFF‐RLS法とも2次のARXモデルを使用してい る。図3.7における(a)(b)(c)(d)は1.実験と同じく, 入出力データ, コヒーレンス関数, 同定モデルの周波数特性, オフラインLS法における実験出力とモデル出力の比較を示して いる。同様に図3.8における(a)(b)(c)(d)は1.実験と同じく, 速度データ, パラメータ 推定値, 可変忘却要素, VFF‐RLS法による実験出力とモデル出力の比較を示している。こ の結果をより, 予想通り矩形波が印加しステージが移動したときに忘却要素が変化し, モ デル変化を適応的に同定していることが確認できる。すなわち, ステッパのような高速位置 決めを繰り返すような系では, 速度ゼロの検出(特性変化)が忘却要素に着目することによ り可能であり, このタイミングで摩擦補償が可能であると期待できる。
(a)入出力データ (b)コヒーレンス関数 (c)同定モデルの周波数特性 (d)実験出力(細)とモデル出力(太) 図 3.1 オフラインLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 0 20 40 60 80 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 P o si ti o n [m m ] 0 0.2 0.4 0.6 0.8 1 1.2 0 20 40 60 80 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 P o si ti o n [m m ] 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 10-6 10-4 10-2 100 10 0 10 1 10 2 10 3 10 4 -400 -300 -200 -100 0 frequency (rad/sec) p ha se ga in 10-6 10-4 10-2 100 10 0 10 1 10 2 10 3 10 4 -400 -300 -200 -100 0 frequency (rad/sec) p ha se ga in 0 500 1000 1500 2000 2500 0 5 10 15 Number of samples P o si ti o n [m m ] 0 500 1000 1500 2000 2500 0 5 10 15 Number of samples P o si ti o n [m m ]
(a)速度データ (b)パラメータ推定値 (c)可変忘却要素 (d)実験出力(細)とモデル出力(太) 図 3.2 VFF-RLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 20 25 30 35 40 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 20 25 30 35 40 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 Time [s] O ut p ut 0 0.2 0.4 0.6 0.8 1 1.2 0 5 10 15 Time [s] O ut p ut
(a)入出力データ (b)コヒーレンス関数 (c)同定モデルの周波数特性 (d)実験出力(細)とモデル出力(太) 図 3.3 オフラインLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 20 40 60 80 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 5 10 15 Time [s] P o si ti o n [m m ] 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 20 40 60 80 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 1.4 0 5 10 15 Time [s] P o si ti o n [m m ] 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 10-6 10-4 10-2 100 100 101 102 103 104 -400 -300 -200 -100 0 Frequency (rad/s) p ha se ga in 10-6 10-4 10-2 100 100 101 102 103 104 -400 -300 -200 -100 0 Frequency (rad/s) p ha se ga in 0 500 1000 1500 2000 2500 0 2 4 6 8 10 12 14 Number of samples P o si ti o n [m m ] 0 500 1000 1500 2000 2500 0 2 4 6 8 10 12 14 Number of samples P o si ti o n [m m ]
(a)速度データ (b)パラメータ推定値 (c)可変忘却要素 (d)実験出力(細)とモデル出力(太) 図 3.4 VFF-RLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 1.4 -10 0 10 20 30 40 50 60 70 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 1.4 -10 0 10 20 30 40 50 60 70 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a 1 a2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a 1 a2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 0 2 4 6 8 10 12 14 Time [s] O ut p ut 0 0.2 0.4 0.6 0.8 1 1.2 0 2 4 6 8 10 12 14 Time [s] O ut p ut
(a)入出力データ (b)コヒーレンス関数 (c)同定モデルの周波数特性 (d)実験出力(細)とモデル出力(太) 図 3.5 オフラインLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 -50 0 50 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 -0.6 -0.4 -0.2 0 0.2 0.4 Time [s] P o si ti o n [m m ] 0 0.2 0.4 0.6 0.8 1 1.2 -50 0 50 Time [s] C o nt ro l in p u t [V ] 0 0.2 0.4 0.6 0.8 1 1.2 -0.6 -0.4 -0.2 0 0.2 0.4 Time [s] P o si ti o n [m m ] 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 1 Frequency [rad/s] C o he re nc e 10-6 10-4 10-2 10 100 101 102 103 104 -400 -300 -200 -100 0 Frequency (rad/s) p ha se ga in 10-6 10-4 10-2 10 100 101 102 103 104 -400 -300 -200 -100 0 Frequency (rad/s) p ha se ga in 0 500 1000 1500 2000 2500 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Number of samples P o si ti o n [m m ] 0 500 1000 1500 2000 2500 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Number of samples P o si ti o n [m m ]
(a)速度データ (b)パラメータ推定値 (c)可変忘却要素 (d)実験出力(細)とモデル出力(太) 図 3.6 VFF-RLS法による同定結果 0 0.2 0.4 0.6 0.8 1 1.2 -20 -15 -10 -5 0 5 10 15 20 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 -20 -15 -10 -5 0 5 10 15 20 Time [s] V e lo c it y [m m /s ] 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a 2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a 2 b1 b2 0 0.2 0.4 0.6 0.8 1 1.2 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 0.9998 0.9999 1 Time [s] F o rg e tt in g f ac to r 0 0.2 0.4 0.6 0.8 1 1.2 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Time [s] O ut p ut 0 0.2 0.4 0.6 0.8 1 1.2 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 Time [s] O ut p ut
(a)入出力データ (b)コヒーレンス関数 (c)同定モデルの周波数特性 (d)実験出力(細)とモデル出力(太) 図 3.7 オフラインLS法による同定結果 0 1 2 3 4 5 6 -100 -50 0 50 100 Time [s] C o nt ro l in p u t [V ] 0 1 2 3 4 5 6 -2 0 2 4 6 8 Time [s] P o si ti o n [m m ] 0 1 2 3 4 5 6 -100 -50 0 50 100 Time [s] C o nt ro l in p u t [V ] 0 1 2 3 4 5 6 -2 0 2 4 6 8 Time [s] P o si ti o n [m m ] 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 Frequency [rad/s] C o he re nc e 0 1000 2000 3000 4000 5000 6000 7000 0 0.2 0.4 0.6 0.8 Frequency [rad/s] C o he re nc e 101 102 103 104 0 0.2 0.4 0.6 0.8 Frequency [rad/s] C o he re nc e 10-5 10-4 10-3 10-2 10-1 10 0 101 102 10 3 104 -400 -300 -200 -100 0 frequency (rad/sec) p ha se ga in 10-5 10-4 10-3 10-2 10-1 10 0 101 102 10 3 104 -400 -300 -200 -100 0 frequency (rad/sec) p ha se ga in 0 1 2 3 4 5 6 -2 -1 0 1 2 3 4 5 6 7 P o si ti o n [m m ] Time [s] 0 1 2 3 4 5 6 -2 -1 0 1 2 3 4 5 6 7 P o si ti o n [m m ] Time [s]
(a)速度データ (b)パラメータ推定値 (c)可変忘却要素 (d)実験出力(細)とモデル出力(太) 図 3.8 VFF-RLS法による同定結果 0 1 2 3 4 5 6 -100 -80 -60 -40 -20 0 20 40 60 80 100 Time [s] V e lo c it y [m m /s ] 0 1 2 3 4 5 6 -100 -80 -60 -40 -20 0 20 40 60 80 100 Time [s] V e lo c it y [m m /s ] 0 1 2 3 4 5 6 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a 2 b1 b2 0 1 2 3 4 5 6 -2 -1.5 -1 -0.5 0 0.5 1 Time [s] P ar a m e te r a1 a 2 b1 b2 0 1 2 3 4 5 6 0.9998 0.9999 1 Time [s] F o rg e tt in g f a c to r 0 1 2 3 4 5 6 0.9998 0.9999 1 Time [s] F o rg e tt in g f a c to r 0 1 2 3 4 5 6 -2 -1 0 1 2 3 4 5 6 7 Time [s] O ut p ut 0 1 2 3 4 5 6 -2 -1 0 1 2 3 4 5 6 7 Time [s] O ut p ut
3.3
精密ステージシステムの摩擦補償
3.3.1
スティックスリップ現象
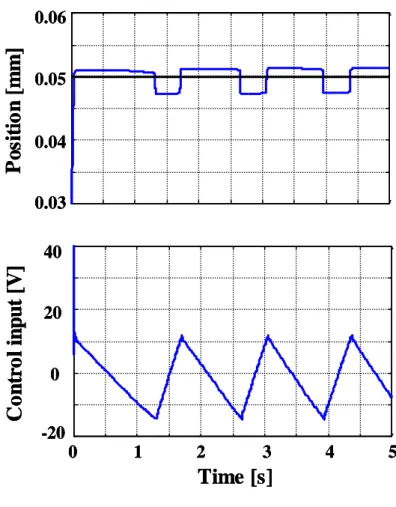
スティックスリップ現象とは, 摩擦の速度負勾配特性の影響によって精密ステージの位 置が目標値近傍で振動する現象である。ここで図3.9においてステージにおける摩擦の速度 負勾配特性示す。 スティックスリップ現象の発生プロセスは以下の通りである。 1. 摩擦の影響によりステージが目標値に到達せずに静止する。 2. 積分(I)制御器の積分動作により, 制御入力が徐々に増大する。 3. 制御入力が静止摩擦力を上回るとステージは動き出すが, 動作に伴い動摩擦が減 少し, 必要以上の力が印加され目標値を超えてしまう。 4. この動作が正方向, 負方向に繰り返されることでステージの位置が目標値近傍で 振動する。 実際にSPIDER駆動精密ステージを用いPID制御(制御帯域幅50 Hz, サンプリング時間 0.5 ms, 計測分解能100 nm)により位置決め制御実験を行った。その時のスティックスリ ップ現象発生時の制御入力及び位置出力波形を図3.10に示す。 このように, スティックスリップ現象は摩擦力の影響によるところが大きいため, 摩擦 駆動を駆動原理とする本精密ステージにおいては, このスティックスリップ現象を回避す ることが重要課題となる。 図3.9 SPIDER駆動ステージの摩擦の速度負勾配特性 -40 -30 -20 -10 0 10 20 30 40 -80 -60 0 20 40F
ri
c
ti
o
n
u
[
V
]
-40 -20 60 8016
13
0
1
拡大図
Steady-state velocity v [mm/s]
-40 -30 -20 -10 0 10 20 30 40 -80 -60 0 20 40F
ri
c
ti
o
n
u
[
V
]
-40 -20 60 8016
13
0
1
16
13
0
1
拡大図
Steady-state velocity v [mm/s]
図3.10 スティックスリップ現象
3.3.2
bang-bang
制御を用いた摩擦補償法
前節で述べたようなスティックスリップ現象を防ぎ, 整定時間の短縮を図るため, PID制 御系にbang-bang制御に基づく摩擦補償法を導入した。bang-bang制御とは, ステージが摩擦 の影響によって静止してしまった際, 事前に同定した静止摩擦力相当の補償電圧 { Fsp, Fsn} をフィードフォワード的に加えることで摩擦によるステージの静止を防ぐというものであ る。ここでFsp は正方向補償電圧で, Fsp = 5.3 [V], Fsn は負方向補償電圧, Fsn = -4.9 [V]とし た。bang-bang制御つき制御系のブロック図を図3.11に示す。 bang-bang 制御を用いて目標値 0.05mmのステップ位置指令を加えた時の実験結果を図 3.12に示す。図でわかるようにbang-bang制御により補償電圧が制御入力に加算されること によりステージが動きだすため, PID制御のみの場合と比べて目標値への追従が早くなって いることが確認できる。-20
0
20
40
C
o
n
tr
o
l
in
p
u
t
[V
]
0
1
2
3
4
5
Time [s]
0.03
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
-20
0
20
40
C
o
n
tr
o
l
in
p
u
t
[V
]
0
1
2
3
4
5
Time [s]
-20
0
20
40
C
o
n
tr
o
l
in
p
u
t
[V
]
0
1
2
3
4
5
Time [s]
0.03
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
0.03
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
図3.11 bang-bang制御つき制御系のブロック図 (a)位置 (b)制御入力 図3.12 PID制御+bang-bang制御のステップ応答波形
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
0
0.2
0.4
0.6
0.8
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
0.04
0.05
0.06
P
o
si
ti
o
n
[
m
m
]
0
0.2
0.4
0.6
0.8
-2
0
2
4
C
o
n
tr
o
l
in
p
u
t
[V
]
0
0.2
0.4
0.6
0.8
Time [s]
-2
0
2
4
C
o
n
tr
o
l
in
p
u
t
[V
]
0
0.2
0.4
0.6
0.8
Time [s]
:PID :PID+bang-bang :Reference :PID :PID+bang-bang :Reference :PID :PID+bang-bang :Reference :PID :PID+bang-bang :Referenceposition
NRUSM
bang-bang compensation
error
F
sp
( x )
F
sn
( x )
pos err
< vel =0>
d
dt
vel
s
k
i
SPIDER
error
F
sp
( x )
Fsn ( x )
pos err
< vel =0>
d
dt
vel
i
s
k
i
pos_ref
position
NRUSM
bang-bang compensation
error
F
sp
( x )
F
sn
( x )
pos err
< vel =0>
d
dt
vel
s
k
i
s
k
i
‐
SPIDER
error
F
sp
Fsn
pos err
< vel =0>
d
dt
vel
Controller
pos_ref
position
NRUSM
bang-bang compensation
error
F
sp
( x )
F
sn
( x )
pos err
< vel =0>
d
dt
vel
s
k
i
s
k
i
SPIDER
error
F
sp
( x )
Fsn ( x )
pos err
< vel =0>
d
dt
vel
i
s
k
i
pos_ref
position
NRUSM
bang-bang compensation
error
F
sp
( x )
F
sn
( x )
pos err
< vel =0>
d
dt
vel
s
k
i
s
k
i
‐
SPIDER
error
F
sp
Fsn
pos err
< vel =0>
d
dt
vel
Controller
pos_ref
3.3.3
可変忘却要素に基づく摩擦補償法
これまでの研究においてbang-bang制御に基づく摩擦補償法を提案してきた[5]。この方法 は前述の通りステージ静止時の位置追従誤差に着目し, オフラインにて同定した静止摩擦 力相当の補償電圧(Fsp , Fsn)をフィードフォワードでオン・オフ的に入力ucに印加する。これ に対し今回提案する手法は, ステージ静止状態の検出ではなく, 可変忘却要素の値により 自動的に補償電圧を加えるタイミングを判定するアルゴリズムである。つまり, 摩擦状態の 変化がVFFによりリアルタイムで同定可能であるため, このVFFの変化に着目し摩擦補償 電圧を印加する手法を提案する。 ステージ駆動用アクチュエータであるSPIDERに図3.13(a)上段のような制御入力を与え る。ここで, 図3.13 (b)はその時の速度変度, 図3.13 (c)は忘却要素の変化を表し, このと きの速度と忘却要素の関係を図3.14のように表せる。図よりステージの動作直後と静止直 前の時(0 mm/s近傍)に忘却要素は大きく減少する。この結果より, 速度負勾配となるストラ イベック領域において忘却要素は減少する。ステージが微速のストライベック領域以外で は忘却要素にあまり変化は見られない。これらの結果を考慮することにより, ステージが止 まる寸前のストライベック領域において制御入力に摩擦補償電圧を加え続けることが有効 であることがわかる。 この補償アルゴリズムのフローチャートを図3.15に示す。フラグは摩擦補償を行うスト ライベック領域を検出するために用いる。SPIDERの同定モデルは2次のARXモデルであ るため積分項、粘性項を考慮にいれている。よって摩擦変化つまり静止摩擦から動摩擦へ の変化, 動摩擦から静止摩擦への変化の時にストライベック領域を経由する。このストライ ベック領域において摩擦特性(摩擦状態の遷移)が変化する。つまり対象が変動したとみ なし忘却要素が1より自動的に小さくなり追従特性を向上させる。前述より, 忘却要素はス テージの動作直後のストライベック領域においての摩擦特性の変化が生じるため忘却要素 の値は1より減少する。そしてステージが静止する直前, つまりストライベック領域に達す るまでは忘却要素は 1 の安定状態になるように減少しストライベック領域到達後に忘却要 素は変動しステージが静止すると忘却要素は1の安定状態から変動しない。そのためステ ージが動作直前に減少し, その後増加する, 再び減少する直前の曲線においてストライベ ック領域に達したと思われる段階で静止摩擦相当の電圧を加えるフラグを立てる。この摩 擦補償を行うタイミングとなるフラグ, つまりしきい値の値は今回, 試行錯誤的に決定し た。(a)制御入出力 (b)速度 (c)忘却要素 図3.13 入出力信号と忘却要素の時間応答波形 0 1 2 3 4 5 -100 -50 0 50 100 0 1 2 3 4 5 -2 0 2 4 6 8 Time [s]
C
on
tro
l i
np
ut
[
V
]
Time [s]Po
si
tio
n
[m
m
]
0 1 2 3 4 5 -50 -40 -30 -20 -10 0 10 20 30 40 50 Time [s]V
el
oc
ity
[m
m
/s
]
0 1 2 3 4 5 1.0 0.99997 Time [s]Fo
rg
et
tin
g
fa
ct
or
図3.14 速度と忘却要素の関係 図3.15 提案摩擦補償アルゴリズムのフローチャート(1サンプル分) 0 4 8 12 20
velocity v [mm/s]
16 0....99999 1F
or
ge
tt
in
g
fa
ct
or
0 4 8 12 20velocity v [mm/s]
16 0....99999 1F
or
ge
tt
in
g
fa
ct
or
no
e(k)>0
yes
no
start
λ
(k)>
λ
(k
−
1)
u
←
u
c+u
spno
no
u
←
u
c+u
snyes
k
←
k+1
yes
1
−
λ
(k)<
σ
flag
←
1
flag=1
yes
e(k)<0
u
←
0
yes
initial value: flag=0
no
flag
←
0
end
k
k
r
(
)
=
)
(
)
(
)
(
k
r
k
y
k
e
=
−
k k y( )= での出力 ステップでの指令可変忘却要素に基づく摩擦補償をSPIDERの位置制御系において実験検証した。前章で述 べたSPIDERのプラントモデル P(s) を以下に示す。 ) ( ] mm/V )[ ( 1 1 p s s k s P + = (3.23) ここでk1 = 1364, p1 = 215である。ここでは, 設計仕様として制御器C(s)はPID制御とし, サンプリング時間 0.5ms, 制御帯域幅 50 Hz, ステップ指令に対するオーバーシュートは 20 % 以内とした。 設定した制御器C(s)は, ) 1 ( ) 1 ( ) ( ) 1 ( ) ( 3 4 1 2 s T s T s T s T s C + + ⋅ + = (3.24) ここでT1 = 5.62×10-4, T2 = 0.0159, T3 = 5.31×10-4 , T4 = 0.00465である。
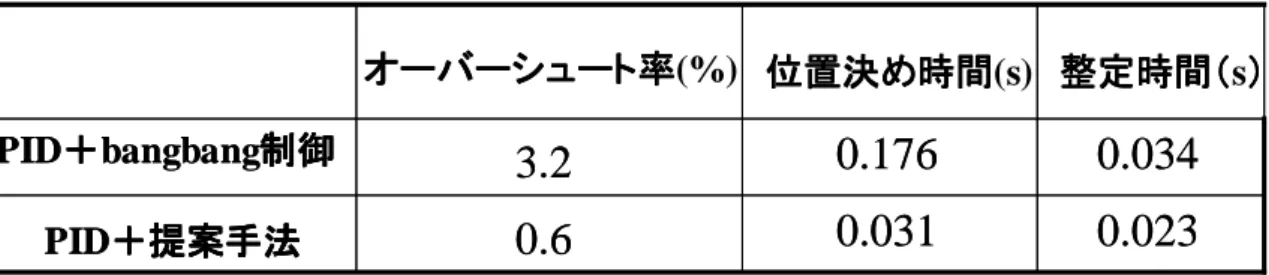
実験にあたっては, (1) PID制御のみ (2) PID+ bang-bang制御による摩擦補償 (3) PID+提 案手法として比較検討した。えられたステップ応答波形を図3.16に示す。更にその拡大図 を図3.17に示す。図3.16より(1)のPID制御のみは前述に述べたように摩擦の影響による ス テ ィ ッ ク ス リ ッ プ 現 象 が 生 じ る た め 目 標 値 に 追 従 で き て い な い こ と が 分 か る 。(2) の
PID+ bang-bang制御は摩擦の影響によるスティックスリップ現象はbang-bang制御により多
少補償されるが位置決め時間は0.176 s という結果になった。(3) のPID+提案手法の提案 手法は, 連続した摩擦補償が可能になったため位置決め時間が0.031 sと大幅に改善できた。 さらに整定時間においても提案手法のほうが早く整定時間に到達した。(2)と(3)の結果の定 量的な比較を表3.1にまとめる。 また図 3.17 より従来の方法より静止摩擦相当の補償電圧が早く入力に加わるため立ち上 がり時間が改善できている。
表3.1 PID+ bang-bang制御とPID+提案手法の結果の定量的な比較表
0.023
0.031
0.6
PID
+
+
+
+提案手法
提案手法
提案手法
提案手法
0.034
0.176
3.2
PID
+
+
+
+
bangbang
制御
制御
制御
制御
0.023
0.031
0.6
PID
+
+
+
+提案手法
提案手法
提案手法
提案手法
0.034
0.176
3.2
PID
+
+
+
+
bangbang
制御
制御
制御
制御
オーバーシュート
オーバーシュート
オーバーシュート
オーバーシュート 率
率
率
率
(%)
位置決
位置決
位置決
位置決 め
め
め
め時間
時間
時間
時間
(s)
整定時間
整定時間
整定時間
整定時間 (
(
(
(
s
)
)
)
)
(a)制御出力 (c)制御出力(拡大図) (b)制御入力 (c)制御入力(拡大図) 図3.16 提案摩擦補償をもつPID制御系のステップ応答波形 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0.01 0 0 0.1 0.2 0.3 Time [s] 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0.01 0 0 0.1 0.2 0.3 Time [s] :Reference :PID :PID+bang-bang :Proposed :Reference :PID :PID+bang-bang :Proposed 0 0.1 0.2 0.3 -30 -20 -10 0 10 20 30 Time [s] C o n tr o l in p u t [V ] 0 0.1 0.2 0.3 -30 -20 -10 0 10 20 30 Time [s] C o n tr o l in p u t [V ] 0.046 0.048 0.05 0.052 0.054 P o si ti o n [ m m ] 0.046 0.048 0.05 0.052 0.054 P o si ti o n [ m m ]
0
0.02
0.04
Time [s]
0.06
0.08
0.046 0.048 0.05 0.052 0.054 P o si ti o n [ m m ] 0.046 0.048 0.05 0.052 0.054 P o si ti o n [ m m ]0
0.02
0.04
Time [s]
0.06
0.08
:Reference :PID :PID+bang-bang :Proposed :Reference :PID :PID+bang-bang :Proposed 0 0.02 0.04 0.06 0.08 -20 -10 0 10 20 30 Time [s] C o n tr o l in p u t [V ] 0 0.02 0.04 0.06 0.08 -20 -10 0 10 20 30 Time [s] C o n tr o l in p u t [V ]図3.17 ステップ波形出力における立ち上がりの比較 0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s]
提案制御法
提案制御法
従来制御法
従来制御法
:
従来制御手法
:
提案制御手法
0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s] 0 0.01 0.02 0.03 0.04 0.05 0.06 P o si ti o n [ m m ] 0 0.04 0.08 0.12 0.16 0.2 Time [s]提案制御法
提案制御法
従来制御法
従来制御法
:
従来制御手法
:
提案制御手法
:
従来制御手法
:
提案制御手法
3.4
まとめと考察
逐次同定にあたり可変忘却要素を導入することにより特性変化, 特に摩擦状態の遷移が 確認できることを示し, 高精度で同定できることを示した。つまりオンラインでの適応同定 において通常の逐次同定よりも可変忘却要素を導入した逐次同定法がより高精度に同定可 能であることがわかった。また, 可変忘却要素に着目して摩擦補償を行うことにより表3.1 より従来法より提案手法の方が位置決め時間においては82 %, オーバーシュート率におい ては81% 改善でき, 従来の摩擦補償よりも高精度かつ高応答の位置決めが可能となること を実験により検証した。 この提案法が従来のアルゴリズムと最も異なる点は摩擦補償電圧を加える時に従来法で は速度情報に着目することで補償電圧のタイミングをとっていることに対して提案手法は 速度情報に頼らず, 忘却要素に着目することで補償電圧のタイミングをとっている。このこ とは計測分解能の高分解能化に伴い空気振動ですら敏感に反応してしまうため, 従来の速 度情報による摩擦補償が困難になるという問題点を無視できる。かつ従来法では静止摩擦 のみの補償であったが忘却要素は摩擦の特性変化を検出できるため前述したストライベッ ク領域全体の摩擦補償をおこなうことができる。後述したことは図3.17により立ち上り時 間が従来法より改善した最も大きな理由である。 また, この提案法の摩擦補償アルゴリズムは今回適用した精密ステージのみならず, 摩 擦補償が必要なアクチュエータ全般に成り立つアルゴリズムである。また今回適用したア クチュエータである精密ステージにおいては何度も実験を繰り返した結果において補償電 圧を加えるしきい値を設定したが, 今後は全般に成り立つしきい値の設定の仕方を考える 必要性がある。第
4
章
精密ステージシステムの
モデル予測制御法
4.1
モデル予測制御法の基本概念
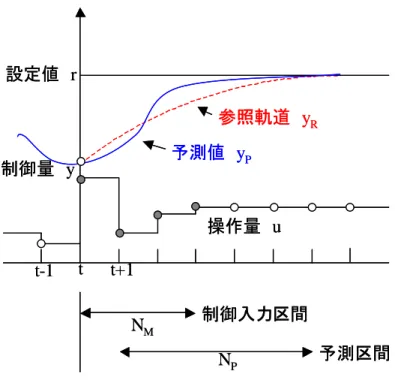
本節では, モデル予測制御について説明する。予測制御ではディジタルコンピュータの著 しい機能性能向上, 小型化, 低廉化から, プロセス制御の分野の計装・制御機器は, この半 世紀の間にアナログ方式からディジタル方式へと大きく変貌を遂げた。それに伴い, プロセ ス制御も従来のアナログ方式によるシングルループ PID フィードバック制御だけのものか ら, より高度で総合的な多変数モデルベース制御をディジタル方式で実現する動きが進ん だ。このような潮流の中で, 1970 年代後半にモデル予測制御 (Model Predictive Control :MPC) が生まれた。今日, モデル予測制御は, プロセス制御の分野において, 最も親しまれ 応用されている高度な制御方式となっている。さらに, 最近では, ロボット制御などの分野 にもモデル予測制御の基本的考え方やアルゴリズムの適用が図られている。 モデル予測制御の基本的な考え方を図4.1を用いて説明する。なお, SISO系を対象に説明 するが, 多変数系でも考え方は同じである。 まず, 現時刻 tにおいて制御量 y(t)を測定し, y(t)を始点として設定値 rに徐々に近づく 参照軌道 (理想とする応答) yR(t+j)を計算する。つぎに, 未来の制御量の予測値 yP(t+j)を求 め, 予測区間 [t+1, t+NP] において予測値が参照軌道にできるだけ近づくように, 制御入力 区間 [t, t+NM -1] の操作量 u(t), u(t+1), …, u(t+NM –1) を決定する。得られた操作量のうち 現時刻に対応する u(t)のみを実際にプロセスに加え, 次のサンプリング時刻t+1までその値 に保持する。ここで, 参照軌道は, モデル予測制御と呼ばれる制御方式のすべてで用いられ ているものではないが, 操作量の急激な変化を避ける一つの方式として用いられている。 時刻 t+1において制御量 y(t+1)が測定されれば, あらためて時刻 t+1を現時刻とみまし, 予測区間ならびに制御入力区間を1ステップ未来にスライドさせ, 参照軌道の設定, 未来の 予測値の計算を行い, 予測値と参照軌道とができるだけ近づくように操作量を決定してい く。以下, この手順を繰り返す。このように, モデル予測制御はステップごとに予測区間, 制 御入力区間をスライドし, オープンループの最適化問題を解く手法である。
図4.1 モデル予測制御の基本概念 またモデル予測制御では, 各サンプル時刻で未来の制御量の動きを予測しなければなら ない。そのためには, 操作量と制御量の動的な因果関係を表現できるモデルが必要となる。 当然, モデルの精度の良し悪しがそのまま制御性能の優劣となって現れる。しかし, 化学プ ロセスのように大規模かつ複雑な制御対象の精密な物理モデルを構築することは極めて困 難であるため, 一般には, 一次遅れ+むだ時間などの線形モデルが利用される。モデル予測 制御のモデルとしては, インパルス応答モデルおよびステップ応答モデルが工業的に広く 利用されている。一方で, 理論面からの研究では, 状態空間モデルが広く利用されている。
![表 2.1 圧電素子の特性 表 2.2 SPIDER の仕様660× 10 -12 m/VExpand mode7.8×103kg/m3density4(Shear mode)× 4(Expand mode)lay number1010×10-12m/VShear mode6.0 mm×3.0 mm× 0.6 mmdimension [mm]PB(Zr,Ti)O3material660×10-12m/VExpand mode7.8×103kg/m3density4(Shear mode)×4(Expand](https://thumb-ap.123doks.com/thumbv2/123deta/6322515.1097618/7.892.180.731.162.444/表21圧電素子の特性表22SPIDERの仕様66×112mVExpand××.webp)
![図 3.11 bang-bang 制御つき制御系のブロック図 ( a )位置 (b)制御入力 図 3.12 PID 制御+ bang-bang 制御のステップ応答波形0.040.050.06Position [mm]00.20.40.60.80.040.050.06Position [mm]0.040.050.06Position [mm]00.20.40.60.8-2024Control input [V]00.20.40.60.8Time [s]-2024Control input [V]00.20.4](https://thumb-ap.123doks.com/thumbv2/123deta/6322515.1097618/26.892.208.733.140.1134/制御つき制御ブロック位置b制御入力図PID制御+ステップ.webp)
![図 3.14 速度と忘却要素の関係 図 3.15 提案摩擦補償アルゴリズムのフローチャート(1サンプル分)0481220velocity v [mm/s]0....99999161Forgetting factor0481220velocity v [mm/s]0....99999161Forgetting factore(k)>0noyesnostartλ(k)>λ(k−1)u←uc+uspnonou←uc+usnyesk←k+1yes1−λ(k)<σflag←1flag=1yese](https://thumb-ap.123doks.com/thumbv2/123deta/6322515.1097618/29.892.217.658.205.509/速度忘却要素関係図提案アルゴリズムフローチャートサンプル.webp)
![図 3.17 ステップ波形出力における立ち上がりの比較00.010.020.030.040.050.06Position [mm]00.040.080.120.160.2Time [s]00.010.020.030.040.050.06Position [mm]00.040.080.120.160.2Time [s]00.010.020.030.040.050.06Position [mm]00.040.08 0.12 0.16 0.2Time [s]提案制御法提案制御法従来制御法従来制御法:従来制御手法:](https://thumb-ap.123doks.com/thumbv2/123deta/6322515.1097618/32.892.122.763.372.802/ステップ波形出力おける立ち上がり比較PositionTimePositionTimePositionTime提案制御法提.webp)