個別適合型運転診断・支援サービスを搭載した常時記録型
ドライブレコーダの開発と行動実証実験(FOT)
― 平成 22 年度(中間報告) タカタ財団助成研究論文 ―
研究代表者
永井 正夫
研究実施メンバー
研究代表者
東京農工大学大学院工学研究室教授
永井
正夫
研究協力者
東京農工大学大学院工学研究院教授
鎌田
崇義
東京農工大学大学院工学研究院特任准教授
ポンサトーン
ラクシンチャラーンサク
東京農工大学大学院工学研究院助教
林
隆三
東京農工大学大学院工学府教務職員
池西
俊仁
東京農工大学大学院修士課程二年
西郷
慎太朗
東京農工大学大学院修士課程一年
西江
剛
東京農工大学工学部四年
成島
直樹
目次
第 1 章 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1
1.1 本研究の背景と目的 2
第 2 章 実験 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4
2.1 実験概要 5
2.2 実験装置 6
2.3 被験者 15
2.4 データベース作成実験 16
2.5 評価実験 20
第 3 章 急ぎ運転検出手法と評価手法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 23
3.1 個別適合型運転支援システム概要 24
3.2 急ぎ運転検出手法 26
3.3 評価手法 33
第 4 章 実車両とドライビングシミュレータの加減速行動の比較 ・・・・・・・ 34
4.1 加速時の最大加速度と車間時間の分布 35
4.2 減速時の最大減速度と車間時間の分布 44
4.3 まとめ 54
第 5 章 評価実験結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 55
5.1 オフラインでの急ぎ運転検出性能の評価 56
5.2 リアルタイム実験結果 64
5.3 支援効果の調査 72
第 6 章 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 81
参考文献
1
第 1 章
緒言
2
1.1 本研究の背景と目的
昨年の日本の交通事故による死者数は4,863 人と 10 年連続で減少している (図 1.1) [1].これは衝突安全技術 や医療の進歩などにより,交通事故に遭っても被害が小さくて済むようになったためである.さらに事故発生 件数と負傷者数は2004 年以降減少傾向にある.これは事故を未然に防ぐ予防安全技術の効果と考えられる.し かし,事故発生件数は未だに年間70 万件以上と高い数値で推移している.また,堀田らの研究では急ぎ運転が 交通事故発生の大きな要因となっていること,事故発生時のドライバの心理状態・運転態度の統計(図 1.2)では 急ぎ運転が事故につながっていることが報告されている[2]- [3].そのため,交通事故を減少させるためには事故 原因の客観的な分析と予防安全技術のさらなる向上が重要といえる. そこで,潜在的事故であるヒヤリハットデータの収集・解析を行うことで事故原因を把握し,交通事故低減を 目指す研究が行われている[4].ヒヤリハットデータの収集には,タクシーやトラックを中心に普及が進んでい る衝撃感知時の映像を記録するタイプのドライブレコーダと,映像と併せて速度などの車両情報を同時に記録 するドライブレコーダが用いられている. 一方,予防安全技術の一つとして事故低減を目的とした運転支援システムが普及している.しかし,従来の運 転支援システムは平均的ドライバを基準とした運転支援を行うため,ドライバによっては適切な支援ができず, 煩わしさ等の不快感を与え支援効果が薄れやすい問題がある.この問題を解決するために本学において,個別 適合型運転支援システムの研究が行われている[5].個別適合型運転支援システムとは,ドライバ個人の運転履 歴を蓄積し運転傾向を学習することにより,すべてのドライバに対して適切な運転支援を行うシステムである. 数年前より,このシステムを用いて事故発生の大きな要因となっている急ぎ運転を検出し,警報によって運転 を支援する研究が行われている.過去の研究では加減速時における加速度の分布からいつもの運転パターンを 作成し,急ぎ運転の検出を行う手法が検討された[6].本報告では,いつもの運転と急ぎ運転では前方車との車 間時間が異なることから,加速度だけでなく車間時間を考慮した急ぎ運転検出手法を検討し[7],リアルタイム に急ぎ運転が検出可能であるかの確認とドライバによるシステムの評価を行う.システムの評価手法としては, 図1.2 の事故発生時の心理状態・運転態度の統計を基にしたアンケートを用いる.公道での急ぎ運転は危険で あることから,評価実験にはドライビングシミュレータを使用した.また,ドライビングシミュレータでの実 験が公道と同じであるか確認するため,実車両でもデータ計測を行い比較する.3
Fig.1.1 Traffic Accident Transition
4
第 2 章
実験
5
2.1 実験概要
本章では第3 章で述べる支援システムの評価実験を行う.公道での急ぎ運転は危険を伴うため,評価実験に はドライビングシミュレータを用いる.しかし,シミュレータ環境での実験が公道と同様であるか確認する必 要がある.そこで実車両とドライビングシミュレータでデータベース作成実験を行い,運転行動を比較する. 【実車両実験】 ・データベース作成実験 実車両で本学周辺の実験コースを走行し、データベース作成を行う.データ計測にはドライブレコーダを用 いる.作成したデータベースはドライビングシミュレータのデータベースとの比較に用いる. 【ドライビングシミュレータ実験】 ・データベース作成実験 ドライビングシミュレータで市街地を模擬した実験コースを走行し、データベース作成を行う.急ぎ運転検 出の閾値算出には,このドライビングシミュレータのデータベースを用いる. ・オフラインでの評価実験 実験コースをいつもの運転と急ぎ運転の2 パターンで走行し,それぞれでデータ計測を行う.計測データを オフラインで解析し,急ぎ運転の検出数を比較することで評価を行う. ・リアルタイムでの評価実験 支援システムを搭載したドライビングシミュレータで走行し,走行中にアンケートを行う.システムの評価 にはアンケート結果を用いる.6
2.2 実験装置
2.2.1 実験車両・計測機器 実車両による走行実験には日産自動車株式会社製のCube (UA-BNZ11)を使用した.この車両には常時記録型 ドライブレコーダ,車間距離計測用レーザーレーダ,GPS ユニットが取り付けられており,速度,車間距離等 の車両情報を記録する.車両の諸元を表2.1,外観を図 2.1,ドライブレコーダと各種センサの配置箇所を図 2.2 に示す. Model Overall length mm 3730 Overall width mm 1670 Overall height mm 1650 Wheel base mm 2430 Tread(Front/Rear) mm 1470/1455Minimum ground clearance mm 140
Weight kg 1140
Capacity person 5
Total weight kg 1415
Turning circle m 4.4
Specific fuel consumption km/l 15.8
Drive system Steering
Front Strut
Rear Torsion beam
Front Ventilated disks
Rear leading trailing brake
Transmission
Final reduction ratio 4.072
Others
FF (electric 4WD) Power assisted rack-and-pinion Suspension
brake
4 Automatic Performance
Table 2.1 Specification of experimental vehicle NISSAN Cube
UA-BNZ11 Size
7
Fig.2.1 Experimental vehicle (Exterior)
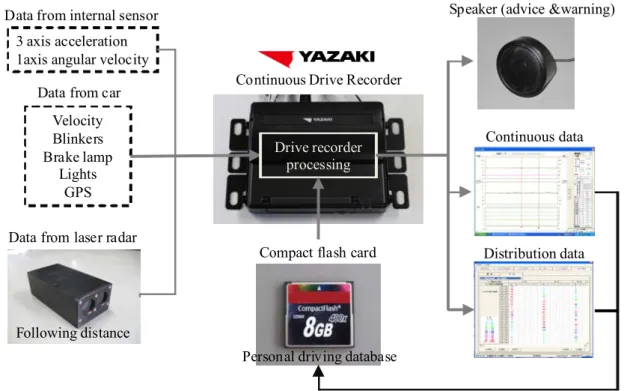
8 走行データ記録には,矢崎計器株式会社と本学が共同開発した常時記録型ドライブレコーダを用いる.ドラ イブレコーダの構成図を図2.3,諸元を表 2.2 に示す.このドライブレコーダは車両の信号から車速,ブレーキ ペダルON/OFF,本体に内蔵されたセンサから三軸方向加速度,Z 軸方向角速度,GPS からの位置情報,レー ザーレーダからの車間距離を計測する.加速度,角速度の軸方向は図2.4 に示す通りであり,取り付け方向に より軸方向は変更可能である.計測された連続データはコンパクトフラッシュカードへと記録される. Continuous data Distribution data Speaker (advice &warning)
Continuous Drive Recorder Velocity Blinkers Brake lamp Lights GPS 3 axis acceleration 1axis angular velocity
Following distance
Drive recorder processing
Data from car Data from internal sensor
Personal driving database Data from laser radar
Compact flash card
Data Sensor type Sensing data Connection method Sampling time
Estimated RS-232C
LAT [0.001/128°]
Estimated
Positional LNG
GPS position information Estimated
data is WGS84 ASL
Estimated velocity Estimated
direction
X-axis Gx A/D (Voltage input)
Y-axis Gy Z-axis Gz
Anguler Anguler velocity A/D (Voltage input)
velocity sensor [15/128 deg/s]
Vehicle Vehicle Vehicle velocity
velocity velocity pulse pulse cycle
Headway Headway RS-232C
distance distance D 0-15000[cm]
Table2.2 Specification of Drive Recorder
GPS data [0.1/128 m/s] [m] 1[s] Acceleration Acceleration sensor [1/170G] 10[ms] [0.2°] [0.001/128°] GPS module Time is UTC 10[ms] 111[ms] Pulse signal Sensor data Laser rader Z-axis ωz 10[ms]
9
車間距離計測に用いるレーザーレーダは,MDL 社製 LaserAce IM-150-R を用いた.レーザーレーダの外観図
を図2.5,設置図を図 2.6 に,諸元を表 2.3 に示す.
Fig.2.6 Location of Laser radar Fig.2.5 Laser radar
10
Wavelength [mm] 905
Beam Divergence [mRad] 2.5×0.2
Reflectorless Range [m] 0.5-150
Accuracy [cm] 5
Resolution [cm] 1
Rep Rate [Hz] 9
Eye safety - Class 1
2m cable with 9-pin D type
Power V 9 to 24
Protocol RS232
Operating temp °C -10 to +60
Protection Class IP67
Dimensions [mm] 103×54×38
Weight [g] 260
Table2.3 Specification of Laserradar MDL LaserAce IM-150-R Data I/O -3.2.2 ドライビングシミュレータ 本研究で使用するドライビングシミュレータの外観を図2.7 に示す.本ドライビングシミュレータは,実車 両同様の運転装置を有しており,道路環境や他車両の交通流などの設定を行うことにより,任意の交通状況や 走行場面(以下,シナリオ)を再現することが可能である. ドライビングシミュレータのシステム概要を図2.8 に示す.このシステムは,①自車両の車両運動を計算す る車両運動計算機,②走行環境や他車両を制御するシナリオ・制御計算機,③走行中の自車両の加速度を模擬 する動揺装置,④ステアリングシステム,ビジュアルシステム,サウンドシステム,運転席入力システムとい ったドライバインターフェイスから構成されている.以降で車両運動計算機,シナリオ・制御計算機,動揺装 置,ドライバインターフェイスについて説明を行う. 【車両運動計算機】 車両運動計算機では,運転席入力システムから送られてくるアクセルペダル,ブレーキペダル,ギヤポジシ ョン,操舵角などのドライバの操作入力や,シナリオ・制御計算機から送られてくる外部入力データを元に, 車両運動状態を計算する.そして,計算された車両運動状態を元に動揺装置やステアリングシステム,シナリ オ・制御計算機に信号を送り,実際の走行場面を再現する. 車両運動状態を計算するために搭載されている車両モデルは4 輪フルモデルであり,タイヤモデルにマジッ
11
クフォーミュラを用いた非線形タイヤモデルを用いることにより,現実の車両運動を忠実に再現することが可 能となっている.また,駆動方式等の各種設定及び車両重心位置,寸法等の各種パラメータを変更することに より,任意の車両モデルを設定することも可能である.
Fig.2.7 TUAT driving simulator
Input System ・Gas pedal ・Brake pedal ・Steering wheel angle ・Turn signal
Visual PC Projector
Absolute axis x, y, z, roll, pitch, yaw
Visual System Scenario PC Control PC Monitor Scenario – Control Calculator Actuator PC Desired
acceleration Displacementand angle Control
unit (AC servo motor)Actuator
Motion System Vehicle Dynamics
Calculator D-Space
Steering
reaction torque Voltage
Motor driver AC servo motor Steering System Sampler ・Engine speed ・Vehicle velocity Speaker Sound System ・Road noise ・Engine sound ・Wind noise ・Other vehicle sound ・Narration
Input System ・Gas pedal ・Brake pedal ・Steering wheel angle ・Turn signal
Visual PC Projector
Absolute axis x, y, z, roll, pitch, yaw
Visual System Scenario PC Control PC Monitor Scenario – Control Calculator Actuator PC Desired
acceleration Displacementand angle Control
unit (AC servo motor)Actuator
Motion System Vehicle Dynamics
Calculator D-Space
Steering
reaction torque Voltage
Motor driver AC servo motor Steering System Sampler ・Engine speed ・Vehicle velocity Speaker Sound System ・Road noise ・Engine sound ・Wind noise ・Other vehicle sound ・Narration
12 【シナリオ・制御計算機】 シナリオ・制御計算機では,車両運動計算機から送られてくる車両運動状態を元に,自車両の位置情報や変 数データを計算する.計算されたデータを元に,車両運動計算機やビジュアルシステム,サウンドシステムに 信号を送り,実際の走行場面を再現する. シナリオ・制御計算機には,任意の走行場面を再現するために,三菱プレシジョン株式会社製のシナリオ作 成ツールがインストールされている.このツールには,他車両の走行制御や障害物の発生制御等を行うために 必要な関数があらかじめ組み込まれており,付属のグラフィック・ユーザ・インターフェイス(以下,GUI)を使 用することで,容易に実験シナリオを作成することが可能である. また,シナリオ・制御計算機ではシナリオ作成ツールを用いることで,車両運動計算機から送られてくるデ ータを元に,車間時間や衝突予測時間を計算し変数として保持することが出来る.この変数は,付属の通信ラ イブラリを使用することで,図2.9 に示すように,車両運動計算機への外部入力データとして出力することが 可能であり,本研究ではこれらを利用して加速度や車間距離などの走行データを収集している. 【動揺装置】 動揺装置は,図2.10 に示す AC サーボモータ駆動型アクチュエータを 6 つ用いることで,6 自由度の運動を 作り出すことが可能となっている.また,ドライビングシミュレータ上で実車と同様の加速度感を実現するた めに,図2.11 に示すような加速度模擬を行っている.実車の加速度をドライビングシミュレータで模擬する際
Cabin
Scenario – Control Calculator
Vehicle Dynamics Calculator
External output data External input data
Indicator Driver
Cabin
Scenario – Control Calculator
Vehicle Dynamics Calculator
External output data External input data
Indicator Driver
13 には,初動加速度にキャビンの並進運動を,持続加速度にキャビンの傾斜を用い,2 つの模擬加速度の和によ り加速度の模擬を行っている. 【ドライバインターフェイス】 ドライバインターフェイスは運転席入力システムやステアリングシステム,ビジュアルシステム,サ ウンドシステムから構成される.運転席入力システムは図2.12 に示す実車両を模擬した運転席でアクセ ルペダルやブレーキペダル,ステアリングなどの入力を行うシステムのことである. 運転席での操作は車両運動計算機やシナリオ・制御計算機を通してステアリングシステム,ビジュア ルシステム,サウンドシステムに入力される.
Fig.2.10 Actuator for motion system (AC servo motor)
Time Accel er ati on Acceleration due to translation
Acceleration due to inclination Summation of both accelerations Time Accel er ati on Acceleration due to translation
Acceleration due to inclination Summation of
both accelerations
14 ・ステアリングシステム ドライバのステアリング操舵角を入力として受け取り,操舵反力を返すシステムである. ・ビジュアルシステム 車両モデルによって計算された車両位置と車両角に応じて車両走行の様子を表示するシステムで,映 像は球面スクリーンに投影される. ・サウンドシステム 車両の運動状態に応じてエンジン音,タイヤのスキーム音,風切音などをリアルタイムに合成してシ ステムである.また,シナリオ上で設定することにより,WAVE 形式のサウンドを再生できる.本研究 ではこれを利用し,警報による支援を行っている.
15
2.3 被験者
本実験では男性17 名を被験者とした.被験者情報を表 2.4 に示す.表中の運転頻度は月に何回運転を行って いるか,運転経験は運転免許保有歴を表している.ただし,被験者j は二輪車を日常的に運転しており,括弧 内に二輪車の運転情報を示す. a~k は実車両実験を,a~e および l~q はドライビングシミュレータ実験を行った被験者である.本学の規定で 実験車両の運転は運転免許保有歴 2 年以上の教員または大学院生に限られている.そのため,a~k の年齢は 23~34 歳,運転免許保有歴は 3~15 年,l~q の年齢は 21~23 歳,運転免許保有歴は 2~4 年と成っている.また, シミュレータ運転時に頭痛や吐き気を催すシミュレータ酔いと呼ばれる症状がある.シミュレータ酔いを起こ すドライバはシミュレータ実験の被験者から外しているため,f~k は実車両実験のみを行っている. Drivingsimulator [time/month] [Year] [km/year]
a 34 5 15 8000 b 23 1 5 100 c 23 1 4 300 d 23 9 4 10000 e 23 1 4 300 f 23 4 4 1000 g 24 1 5 100 h 23 4 4 500 i 24 0.25 3 100 j 23 4 5 1500 k 24 4 5 2000 l 22 0.25 3 900 m 23 0.25 3 800 n 22 0 4 0 o 21 2 3 150 p 22 0.2(25) 2(3) 200(15000) q 23 9 4 500 ☓ ○ Table 2.4 Subjects Annual mileage Driving experience Frequency of drive ○ ○ ○ ☓ Subject Age Real car Experiment
16
2.4 データベース作成実験
2.4.1 実車両実験・実験コース 本実験ではデータベース作成のため,全長約12km の実験コース 1 周を 1 トリップとし,各被験者に 10~20 トリップの走行をさせる.実験は10~18 時の間に行い,時間帯によって交通量は変化している. 実験コースは以下の図2.15 に示す本学周辺のコースを設定した.このコースは農工大通りの制限速度 30km/h の区間,連雀通りや小金井街道などの制限速度40km/h の区間,東八道路の制限速度 60km/h の区間から構成さ れる.図2.13(a)~(c)に各区間の道路環境を,以下に特徴を示す. ・制限速度30km/h 区間 歩行者や自転車が多く,センターラインがない道路の区間. ・制限速度40km/h 区間 片側1 車線道路で,交通量は道路によって様々な区間. ・制限速度60km/h 区間 片側2 車線の中央分離帯を持つ幹線道路の区間. 以上のように様々な運転場面の起こるコースとなっている.このコースを1 周するためには被験者の平均で約 30 分を必要とする.17
(a) Legal speed 30km/h section (b) Legal speed 40km/h section
(c) Legal speed 60km/h section
A C D E F H I J K G A C D E F H I J K G
Road section 1 (Legal speed 30km/h) Road section 2 (Legal speed 40km/h) Road section 3 (Legal speed 60km/h) Traffic signal B A C D E F H I J K G A C D E F H I J K G
Road section 1 (Legal speed 30km/h) Road section 2 (Legal speed 40km/h) Road section 3 (Legal speed 60km/h) Traffic signal
B
18 2.4.2 ドライビングシミュレータ実験・実験コース 本実験ではデータ計測のため,全長約5km 実験コース 2 周を 1 トリップとし,各被験者に 10 トリップの走 行をさせる.実験には本研究用に作成したシナリオを用いた.シナリオでは実車両実験を模擬するため,道路 ごとに歩行者や対向車を含めた交通流を設定し,前方車は速度と進行方向をランダムに変化させた.走行時間 帯は実車両実験と同じく昼間とした. 実験コースは実車両実験コースを模擬できるように,図2.14 に示すドライビングシミュレータの市街地コー スを設定した.図中に示すように実験コースには30km/h,40km/h,50km/h の制限速度があり,それぞれが図 2.13(a)~(c)に示す道路環境(車線数,制限速度,交通流)を模擬している.図 2.14(a)~(c)に各区間の道路環境を, 以下に特徴を示す. ・制限速度30km/h 区間 歩行者がおり,センターラインがない道路の区間. ・制限速度40km/h 区間 片側1 車線道路の区間. ・制限速度50km/h 区間 交通量の多い片側2 車線道路の区間. 以上のように実験コースは実車両実験コースと同様の道路環境となっている.また,区間F の走行を終了する と自動的に区間A に移動するが,両区間の背景はリンクしているため違和感なく走行を続けることが可能であ る.このコースを1 周するためには被験者の平均で約 10 分を必要とする.
19
Fig.2.14 Driving simulator experimental course (b) Legal speed 30km/h section
(a) Legal speed 40km/h section
(c) Legal speed 50km/h section
Section A Section C Section E Section F Section B Section D
Single-lane road
(Legal speed 40km/h)
Two-lane road
(Legal speed 50km/h)
Narrow road (5.5m) (Legal speed 30km/h)
Traffic signal
①
②
③
④
⑤
20
2.5 評価実験
2.5.1 概要 評価する急ぎ運転検出手法は,第3 章で説明する「加減速度の度数分布による検出手法(以下,AID 手法)」, 「主成分分析による検出手法(以下,PCA 手法)」,「全被験者の閾値の平均(全速度域共通)による検出手法 (以下,共通閾値手法)」の3 種類とする.被験者と実験コースはドライビングシミュレータによるデータベー ス作成実験と同じであり,閾値算出には作成したデータベースを用いる. オフラインでの評価用のデータ収集のため,以下の実験を行った.実験は2 周を 1 トリップとし,合計 2 ト リップの走行を行う.1 トリップはいつもの運転を,もう 1 トリップは急ぎ運転を指示し走行をさせる.いつ もの運転のトリップと急ぎ運転のトリップは別日程で行っている.それぞれの走行データをオフラインで解析 し,手法ごとに急ぎ運転の検出数を比較することで評価を行う. リアルタイムでの急ぎ運転検出能力の確認とドライバによる支援システムの評価のため,以下の実験を行う. 実験は1 周を 1 トリップとし,手法ごとに走行をさせる.ただし,被験者にはどの検出手法で警報による支援 を行っているかは知らせていない.また,評価には次項で説明するアンケートを用いる. 2.6.2 アンケート ドライバによる評価には図2.15 に示すアンケートを用いた.アンケート調査は図 2.16 に示すフローチャート に沿って行っている.図2.14 に示す区間 A~F のそれぞれで心理状態(急いでいたか),警報が鳴った場合はそ のときの煩わしさ,心理状態・運転態度について調査する.さらに,警報が鳴った次の区間では安全運転で心 掛けた点について調査する.アンケートは図2.14 に示す①~⑤の地点に設けた信号待ちイベントを利用して行 い,記憶が曖昧になることを避けている.また,実験終了時に全区間での警報の煩わしさについて調査を行う. 心理状態・運転態度のアンケート項目は第1 章の図に示した事故発生時の心理状態・運転態度として回答数 が多かったものを採用した.21
Section A・B・C・D・E・F Were you hurried in this section?
Not at all Neither hurried nor not hurried very hurried ⇔
1 2 3 4 5
Warning in this section Did you feel botheration?
Not at all Neither bothersome nor not bothersome very bothersome ⇔
1 2 3 4 5
Mental states of Drivers
□ Feeling hurried
□ Thinking about Something else □ Feeling Absent-mined
□ Not paying Attention ・ Looking away from the road □ Driving carelessly
□ Feeling tired
□ Agitated because Didn't know the road well □ Normal Drinving
Warning in next section
Did you pay attention to safety driving ?
Yes No
particularly
□ Acceleration・Deceleration □Head way distance □ Velocity
□ etc ( )
Finished driving
Did you feel botheration in this trip?
Not at all Neither bothersome nor not bothersome very bothersome ⇔
1 2 3 4 5
22
Warning previous section? Warning this
section?
Research safety driving
Research hurry driving
Research botheration and mental state
Driving this section
Driving next section YES
YES
NO
NO
23
第 3 章
24
Fig.3.1 Schematic diagram of assistance system with individual adaptation
3.1 個別適合型運転支援システム概要
運転支援システムとは予防安全技術のひとつで,ドライバが安全に運転できるように情報提示,警告,操作 の支援などを行うシステムのことである.従来の運転支援システムは平均的なドライバを基準とし,全てのド ライバに対して同じ基準の運転支援を行っている.そのため,ドライバによっては運転状態と運転支援が一致 せず,適切な支援が行えない.その結果としてドライバに不快感を与え,支援の効果が薄れてしまう可能性が ある.この問題を解決するために本学において個別適合型運転支援システムの研究が行われている. 個別適合型運転支援システムは個人の運転特性や癖などに適応する支援システムであり,予防安全技術の向 上を現行以上に図ることができる技術である.図 3.1 に個別適合型運転支援システムの概要図を示す.個別適 合型運転支援システムは個人ごとのいつもの運転の走行データを蓄積し,走行パターンを作成する.作成した 走行パターンを基に支援を行うことで,すべてのドライバに対して適合した運転支援を行う.Driving behavior
prediction
Hazardous/Anomaly
detection
Information guidance,
warning, system intervention
Integrated
sensing
Current
driving
Ordinary
driving
Comparison
Storage
+
_
Driving database
Ordinary driving Behavior analysis by Data mining 個別適合型運転支援システムにより運転支援を行う手順を以下に示す.また,個別適合型運転支援システム のフローチャートを図 3.2 に示す. (1) 現在の運転 ドライバの運転をリアルタイムに計測し,走行データを取得する. (2) 走行データの蓄積 過去から現在までの走行データを連続的に蓄積する.この時蓄積されるデータには,急ぎ運転や通常運転な ど,様々な運転状況のデータが含まれる. (3) データマイニングによる運転行動の抽出 蓄積された走行データからデータマイニングを行い,ドライバ個人の運転の特徴,癖を抽出し,ドライバの 「いつもの」運転を抽出する. (4) 現在の運転との比較 データマイニングにより得られた個人のいつもの運転行動と,現在の運転行動を比較する. (5) 支援 いつもの運転行動と現在の運転行動に差があれば,ドライバへ支援を行う.25
Fig.3.2 Flowchart of individual adaptation assistance system
Current driving behavior
Storage all driving data to database
Ordinary driving behavior
analysis by Data mining
(4) Comparison
Assistance
(1)
(2)
(3)
(5)
26
3.2 急ぎ運転検出手法
本研究で提案する急ぎ運転検出手法について,以下で述べる.3.2.1 イベントデータの定義
ドライバは急ぎ運転時において,少しでも早く目的地に着こうとする衝動に駆られるため,通常 運転時に比べてペダル操作時の加減速度が大きくなり車間距離が短くなる傾向がある[8].このため, 加速度と車間距離に注目し急ぎ運転検出を行う.車間距離のように前方車との関係を表す指標に車間 時間がある.車間時間とは自車が現在の速度を保った場合に前方車がいる地点に到達するまでにかか る時間である.車間時間Thw は,図 3.3 に示すように車間距離 R,速度を V とすると,以下の式で求 めることができる.V
R
T
hw
(3.1)
本研究で用いる手法では1 回の加減速行動を 1 イベントとし,急ぎ運転検出を行う.特徴量とし て用いるデータは以下の3 種類である. 加減速イベント開始時の速度 (Vst) 加減速イベント中の最大加速度および最大減速度 (Accmax)(Decmax) 加減速イベント開始時の車間時間 (Tst) 図 3.4 に減速イベント時の特徴量の取得例を示す.図中の横軸は時間軸で,縦軸は上からそれぞれ 速度,加速度,車間時間,車間距離,ブレーキON/OFF となっている. 図 3.3 のブレーキ ON/OFF を 見ると 2 秒付近でブレーキ使用が開始され,5.5 秒付近でブレーキを離していることがわかる.この ブレーキ使用開始時から終了までを1 回の減速イベントとする.ブレーキ使用開始時の速度と車間時 間をそれぞれ速度 Vst,車間時間 Tst として取得する.この減速イベント開始から終了までの間に計 測された減速度の最大値を最大減速度Decmax とする. 加速イベント時は加速度が 0.04G を越えたときを加速イベント開始,0.04G を下回ったときを加速 イベント終了とする.この加速イベント開始から終了までの間に計測された加速度の最大値を最大加 速度Accmax とする.その他の特徴量の求め方は減速イベント時と同様である. 加速度と車間時間は速度域毎に異なる傾向を持つと考え,以上のように定義されたイベントデータ を速度Vst により 20km/h 毎に分類する.分類したイベントデータ毎に最大加減速度と車間時間の度数 分布を作成し,急ぎ運転検出に用いる.Fig.3.3 Example of Headway distance and velocity
Head way distance
Velocity
R
27 0 1 2 3 4 5 6 7 0 20 40 60 V elo ci ty [ km /h ] 0 1 2 3 4 5 6 7 -0.2 0 0.2 A cceleration [G ] 0 1 2 3 4 5 6 7 0 2 4 6 T im e hea dw ay [ s] 0 1 2 3 4 5 6 7 0 50 100 H ead w ay d ist an ce [ m ] 0 1 2 3 4 5 6 7 OFF ON B ra ke pe da l O N /O FF Time [s] Decmax Tst
Braking start point Braking end point
Vst
3.2.2 加速度(減速度)による急ぎ運転検出
急ぎ運転時は加減速度が大きくなることから,この検出手法では分類した速度域毎に最大加速度お よび最大減速度の度数分布から閾値を算出し,急ぎ運転検出を行う [8].得られた度数分布を正規分布 に近似し,近似した分布の累積確率が95%となる点を閾値に設定する.各加減速イベントの最大加速 度(最大減速度)をdi,最大加速度(最大減速度)の平均値をμ,標準偏差をσとすると,閾値 T(d) は以下の式で求めることができる.
n k kd
n
11
n i id
n
1 2 21
(
)
2
)
(
d
T
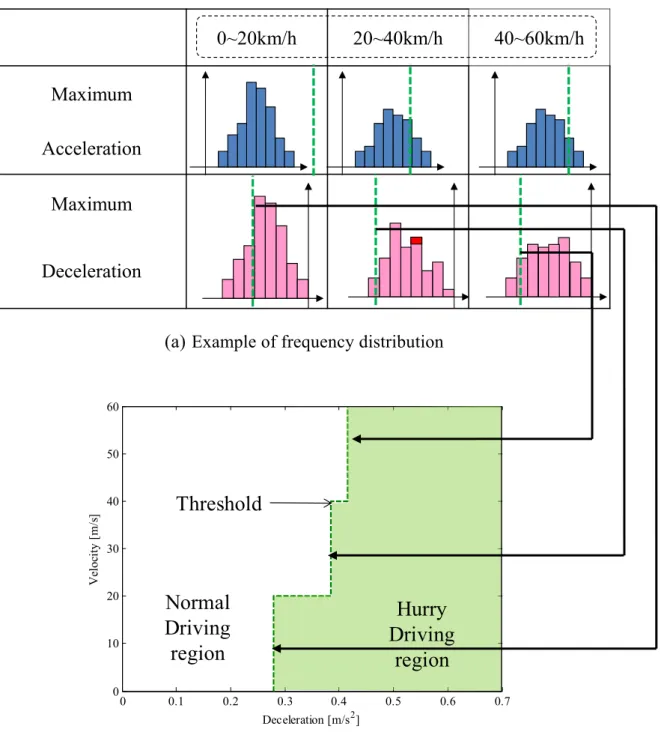
図3.5 に加減速イベントから度数分布を作成する例を示す.図 3.5(a)のように取得した特徴量を用い て,図 3.5(b)のように加減速イベントを速度域毎に分類し度数分布を作成する.この度数分布から得 られた閾値を図3.6(a),(b)に緑破線で表す.図 3.6(b)に示す閾値を超えた領域(緑色の領域)を急ぎ運 転と仮定し,この領域に含まれる加減速イベントを急ぎ運転として検出する.(3.2)
(3.3)
(3.4)
Fig.3.4 Example of feature quantity in deceleration event
28 0 1 2 3 4 5 6 7 0 20 40 60 V elo ci ty [k m /h ] 0 1 2 3 4 5 6 7 -0.2 0 0.2 Ac ce le ra ti on [ G ] 0 1 2 3 4 5 6 7 OFF ON Br ak e p ed al ON/ OF F Time [s]
Dec
maxBraking end point Braking start point
V
st0~20km/h 20~40km/h 40~60km/h
Maximum
Acceleration
Maximum
Deceleration
Assortment by
velocity
Fig.3.5 Building of frequency distribution
(a) Example of feature quantity in deceleration event
29
0~20km/h 20~40km/h 40~60km/h
Maximum
Acceleration
Maximum
Deceleration
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0 10 20 30 40 50 60 Deceleration [m/s2] V elo city [ m /s ]Normal
Driving
region
Hurry
Driving
region
Threshold
Fig. 3.6 Example of threshold (deceleration)
(a) Example of frequency distribution
30
3.2.3 加速度(減速度)と車間時間による急ぎ運転検出
急ぎ運転時は加減速度が大きくなり車間距離が短くなることから,この検出手法では前方車追従時 における加速度と車間時間の分布から閾値を算出し,急ぎ運転検出を行う[8]. まず,前方車追従状態について定義する.車間時間には前方車追従状態と単独走行状態の2 つの状 態が混在している.前方車追従状態と単独走行状態を分けるために車間時間の分布を混合正規分布に 近似し,2 つの分布に分離する.2 つの分布のうち,車間時間が短い分布を前方車追従状態と仮定する. 近似した分布のパラメータから累積確率 99.7%となる値を閾値として算出し,この車間時間以下のイ ベントデータを前方車追従状態とする.例として図 3.7 に追従状態の判別閾値を示す.図中の緑色の 領域を追従状態と仮定し,この領域内の車間時間での加減速行動について急ぎ運転検出を行う. この急ぎ運転検出手法では急ぎ運転に関係する成分を抽出するため,主成分分析を用いる.主成分 分析とは,複数の変数が存在する場合にそれらの間の相関を考慮した合成変数に変換することで,複 数の変数が全体として持っている情報をより解釈しやすくして抽出する方法である.主成分分析によ る閾値算出を行った例を図3.8 に示す.図 3.8(a)の青線が主成分分析によって得られた各主成分の軸で ある.また各主成分の分布の例として図3.8(b),(c)を示す.図 3.8(b),(c)の分布を正規分布に近似し,0
1
2
3
4
5
6
7
8
Time headway[s]
Threshold (μ+3σ)
Car following state
Cruising state
31 近似した分布の95%が含まれる領域をいつもの運転と仮定して閾値を設定する. 加減速イベントの各主成分を xk,xk の平均値をμ,xk の標準偏差をσとすると,閾値 T(x)は以下 の式で求めることができる.
n k kx
n
11
n i ix
n
1 2 21
(
)
2
)
(
x
T
図3.9 に各主成分による閾値と閾値によって区切られた領域を示す.図中の赤の破線が閾値である. 各領域は以下に示すように解釈することができる. 領域1 前方車との車間時間が短く,加速度も小さいことから,細かい加減速行動で車間距離を短く保って いると考えられる.そのため,前方車を煽っている状態と解釈できる. 領域2 車間時間が短く,加速度は大きいことから,車間距離をつめて前方車の加減速行動に合わせた急 加減速行動を行っている状態や前方に急に表れた車両などに対するヒヤリハットが起こった状態と解 釈できる. 領域3 加速度は大きいが,車間時間は長いことから,運転は荒くなっているものの前方車との距離は十 分にとっている状態と考えられる.そのため,やや攻撃的な運転と解釈できる. 領域4 加速度は小さく,車間時間も長いことから,心理的に余裕のある安全運転を行っている状態と解釈 できる. これらより,領域1,2 の状態を急ぎ運転として仮定して,領域 1,2 に含まれる加減速イベントを 急ぎ運転として検出する.(3.5)
(3.6)
(3.7)
32 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 20 40 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 0 20 40 0 0.2 0.4 0.6 0.8 1 0 1 2 3 4 5 6 Acceleration [G] T im e he ad w ay [ s] Threshold of second principal component 2 1 Threshold of first principal component
The first principal component line The second principal component line
3 4
Safety driving
Aggressive driving
0 0.2 0.4 0.6 0.8 1 0 1 2 3 4 5 6
Acceleration [G]
T
im
e h
ead
w
ay
[
s]
2
1
3
4
Normal driving
Hurry driving
Threshold of first principal component Threshold of second principal componentFig.3.8 Example of principal component analysis
(b) First principal
component
(c) Second principal component
(a) Threshold and region
33
3.3 評価手法
【ドライビングシミュレータと実車両の比較手法】 ドライビングシミュレータでの実験が公道の同じであるか確認するため,ドライビングシミュレ ータと実車両のデータベースを比較する.データベースのうち比較に用いるデータは加減速行動中の 最大加減速度と車間時間の度数分布の形状,平均・標準偏差とする. 【オフラインでの急ぎ運転検出性能の評価手法】 オフラインで各検出手法のいつもの運転時と急ぎ運転時の急ぎ運転検出数を算出する.いつもの 運転時の検出数に対する急ぎ運転時の検出数を各手法で比較する.いつもの運転時の検出数に対して 急ぎ運転時の検出数が多いほど,急ぎ検出性能が高いと評価する.また,検出したイベントの時系列 データから各手法で検出したイベントがどのような状況であったかを調査し,急ぎ運転や異常運転を 検出しているか確認する. 【リアルタイムでの急ぎ運転検出性能の評価手法】 各走行区間でドライバに急ぎ運転を行っていたかのアンケート結果からドライバが急ぎ運転を行っ ていた区間の数を求める.アンケートは1 の「まったく急いでいなかった」,2 の「あまり急いでいな かった」,3 の「どちらでもなかった」,4 の「やや急いでいた」,5 の「とても急いでいた」の 5 段階 評価とし,4 以上と回答した区間を急ぎ運転区間とみなす.全被験者の急ぎ運転区間の合計を Sh,急 ぎ運転区間のうち警報がなった区間をSd とすると,ドライバ自身が考える急ぎ運転の検出率 Dh は以 下の式で求めることができる.V
R
T
hw
(3.8)
この急ぎ運転検出率Sd を比較するでリアルタイムでの急ぎ運転検出性能の評価を行う. 【ドライバによる支援システムの評価手法】 走行終了時に行った警報の煩わしさに関するアンケートと警報が鳴った回数から,各手法のドライ バにとっての煩わしさを評価する.煩わしさは 1 の「まったく煩わしくなかった」,2 の「あまり煩わ しくなかった」,3 の「どちらでもなかった」,4 の「やや煩わしかった」,5 の「とても煩わしかった」 の5 段階評価とする.また,個々の区間で警報が鳴った時に行った煩わしさと心理状態のアンケート からどのようなタイミングでのドライバにとって煩わしくないかを調査する. 【警報による支援効果の評価手法】 警報が鳴った後のアンケートで安全運転を心掛けたかを調査する.安全運転を心掛けたと回答した 区間で被験者が,実際にいつもの運転に比べ安全運転を行ったかを区間走行中の時系列データから確 認し,支援効果の評価を行う.また,特に安全運転を心掛けなかったと回答した被験者でも同様に確 認し,ドライバが無意識に安全運転を行う効果があるか評価する.34
第 4 章
実車両と
ドライビングシミュレータの
加減速行動の比較
35
4.1 加速時の最大加速度と車間時間の分布
実車両とドライビングシミュレータの加速行動を比較するため,実車両実験とシミュレータ実験両 方を行った被験者の加速イベント中の最大加速度の分布を図 4.1~4.3 に,分布の平均と標準偏差を表 4.1~4.2 に示す.赤いヒストグラムが実車両,青いヒストグラムがドライビングシミュレータのデータ である.また,ヒストグラムを正規分布に近似した結果を実線で示す. まず,図4.1~4.3 と表 4.1 から,いずれの被験者においてもドライビングシミュレータの最大加速度 の平均は実車両に比べ,0~20km/h では大きく,40~60km/h では小さくなることがわかる.また被験者 によっては,双方の最大加速度の平均は低速度になるほど一致しなくなる傾向がある. 次に,図4.1~4.3 と表 4.2 から,いずれの被験者においてもドライビングシミュレータの最大加速度 の標準偏差は実車両に比べ,全ての速度域で大きくなることがわかる.また,双方の最大加速度の標 準偏差は低速度になるほど一致しなくなる傾向がある. これらのことからドライビングシミュレータの最大加速度の分布は低速度になるにつれて一致しな くなっていく.これは低速度域でのアクセルペダルの踏みすぎが原因であると推測される. ドライビ ングシミュレータでは実車両に比べ全般的に速度を低く感じ,特に低速度域において速度感の誤差率 が大きいことがわかっている[8].ドライバが速度を低く感じることから,目標よりも速度を出しすぎ てしまうことが予想される.この際,アクセルペダルを踏みすぎるため,大きな加速度が生じると考 えられる.また,速度感の表現には画角(走行風景が映し出される範囲)が関与しており,画角が大 きくなるにつれて誤差率は小さくなる[8].本学のシミュレータではドライバの左右にスクリーンが配 置されていないことも速度感に影響している.36
0
0.1
0.2
0.3
0.4
0.5
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.1
0.2
0.3
0.4
0.5
0
0.5
Subject b
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0
0.5
Subject c
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0
0.5
Subject d
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0
0.5
Subject e
Acceleration[G]
Fr
eq
ue
nc
y[
-]
37
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0
0.5
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0
0.5
1
Subject b
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0
0.5
Subject c
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0
0.5
Subject d
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0
0.5
Subject e
Acceleration[G]
Fr
eq
ue
nc
y[
-]
38
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.5
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.5
1
Subject b
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.5
1
Subject c
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.5
1
Subject d
Fr
eq
ue
nc
y[
-]
0
0.05
0.1
0.15
0.2
0.25
0.3
0
0.5
1
Subject e
Acceleration[G]
Fr
eq
ue
nc
y[
-]
39 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 0.149 0.088 0.080 Driving simulator 0.261 0.115 0.076 Real car 0.117 0.076 0.074 Driving simulator 0.123 0.074 0.065 Real car 0.159 0.094 0.075 Driving simulator 0.172 0.083 0.062 Real car 0.135 0.099 0.081 Driving simulator 0.205 0.105 0.081 Real car 0.130 0.083 0.074 Driving simulator 0.201 0.098 0.070
Subject Vehicle Average of maximum acceleration [G] Table4.1 Average of maximum acceleration
c d e a b 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 0.0661 0.0322 0.0241 Driving simulator 0.1261 0.0574 0.0255 Real car 0.0374 0.0222 0.0157 Driving simulator 0.0642 0.0307 0.0277 Real car 0.0530 0.0244 0.0162 Driving simulator 0.0880 0.0389 0.0175 Real car 0.0513 0.0447 0.0264 Driving simulator 0.1056 0.0464 0.0269 Real car 0.0499 0.0237 0.0160 Driving simulator 0.1220 0.0520 0.0242 Vehicle Standard deviation of maximum acceleration [G] Subject
Table4.2 Standard deviation of maximum acceleration
e a b c d 同様に各被験者の加速イベント中の車間時間の分布を図4.4~4.6 に.分布の平均と標準偏差を表 4.3~4.4 に示す.なお,先行研究で車間時間 6 秒以下を前方車追従状態としていることから,車間時間 6 秒以下のイベントデータのみを用いた[8]. 図4.4~4.6 と表 4.3~4.4 から,ドライビングシミュレータの車間時間の平均は実車両に比べて小さく, 標準偏差は大きくなる傾向があることがわかる. これは先述のようにドライビングシミュレータでは速度を低く感じるため,速度を出しすぎてしま うことが原因であると考えられる. ドライビングシミュレータは実車両に比べ,全般的に距離を短く感じ,高速度域において距離感の 誤差率が大きくなることがわかっている[8].ドライバが距離を短く感じることから,車間距離を長く することが予想される.図4.7 に被験者 a の加速イベント開始時の車間距離の分布を示す.ただし, 車間距離60m 以下のイベントデータのみを用いている.図 4.7 から車間距離の最頻値はドライビング シミュレータの方が大きいことがわかる.このようにドライビングシミュレータでは実車両よりも車 間距離を長くとっているが,速度を出しすぎてしまうため車間時間は短くなる. また,ドライビングシミュレータでは実車両に比べ,車間時間が1 秒以下での加速イベントが頻繁 に見られた.これはドライビングシミュレータでの実験は安全性が確保されているため,被験者の緊 張感が薄れてしまったためと考えられる.このことも車間時間の平均が短くなった原因であると言え る.
40
0
1
2
3
4
5
6
0
0.1
0.2
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.2
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
41
0
1
2
3
4
5
6
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.2
0.4
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.1
0.2
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
42
0
1
2
3
4
5
6
0
0.1
0.2
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.1
0.2
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.1
0.2
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
43 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 3.074 2.390 2.829 Driving simulator 3.054 2.286 2.013 Real car 3.670 3.991 3.521 Driving simulator 3.086 3.797 2.166 Real car 3.625 3.555 3.010 Driving simulator 3.430 3.506 3.926 Real car 3.361 2.785 2.462 Driving simulator 2.856 2.313 2.102 Real car 3.187 3.029 2.915 Driving simulator 3.308 2.782 2.594 d
Table4.3 Average of Time headway(acceleration) Vehicle Average of Time headway [s] Subject a b c e 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 1.346 1.471 1.885 Driving simulator 1.374 1.400 1.272 Real car 1.104 1.198 0.932 Driving simulator 1.715 1.828 1.771 Real car 1.183 1.219 0.909 Driving simulator 1.406 1.568 1.464 Real car 1.267 1.486 1.184 Driving simulator 1.332 1.238 1.228 Real car 1.071 1.268 0.937 Driving simulator 1.424 1.433 1.608 Standard deviation of Time headway [s]
e d c
Table4.4 Standard deviation of Time headway(acceleration) Subject a b Vehicle 0 10 20 30 40 50 60 0 0.5 0~20[km/h] Fr eque nc y[ -] Real car Driving simulator 0 10 20 30 40 50 60 0 0.1 0.2 20~40[km/h] Fr eque nc y[ -] 0 10 20 30 40 50 60 0 0.1 0.2 40~60[km/h] Fr eque nc y [ -]
Head way distance [m]
44
4.2 減速時の最大減速度と車間時間の分布
加速時と同様,実車両実験とシミュレータ実験両方を行った被験者の減速イベント中の最大減速度の 分布を図4.8~4.10 に,分布の平均と標準偏差を表 4.5~4.6 に示す. 図4.8~4.10 を見ると,実車両の分布は速度域や被験者に因らず 0.1~0.2G を中心とした正規分布とな っているが,ドライビングシミュレータでは速度域や被験者によって分布形状が異なっていることが わかる.ドライビングシミュレータでは0~20km/h の速度域では 0.05G 以下の非常に弱い減速度と 0.3G 付近を中心とする分散の大きな正規分布を組み合わせた形状になっている.20~40km/h,40~60km/h の速度域では被験者b のように 0~0.6G 程度まで様々な大きさの減速度が観測される分布や,被験者 e のように0.05G 以下と 0.6G 程度の 2 種類の減速度に別れた分布など一貫性が見られない.被験者 e などに見られる2 種類の減速はそれぞれどのような運転状況で起こるのかを調べるため, 図4.11 に被験者 e の減速イベント時の最大減速度とその減速イベント終了時の速度の散布図を示す. 図4.11 を見ると実車両では減速終了時に 0km/h になる減速,すなわち停止行動で観測される最大減速 度と,停止行動以外の減速行動で観測される最大減速度に差は見られない.しかし,ドライビングシ ミュレータでは最大減速度が0.3G 以下での停止行動が行われていない.これはドライビングシミュレ ータのブレーキの調整が難しく,ほとんど踏まないと小さい減速しかせず,少し踏みすぎると大きな 減速になってしまっているためと推測する. そのため2 種類の最大減速度に別れた分布形状が見られると考えられる.45
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
0.2
0.4
Subject b
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
0.5
Subject c
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
0.2
0.4
Subject d
Fr
eq
ue
nc
y[
-]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0
0.2
0.4
Subject e
Deceleration[G]
Fr
eq
ue
nc
y[
-]
46
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject b
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject c
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject d
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject e
Deceleration[G]
Fr
eq
ue
nc
y[
-]
47
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject b
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject c
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
Subject d
Fr
eq
ue
nc
y[
-]
0
0.2
0.4
0.6
0.8
1
0
0.5
Subject e
Deceleration[G]
Fr
eq
ue
nc
y[
-]
48 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 0.140 0.204 0.262 Driving simulator 0.178 0.392 0.436 Real car 0.102 0.165 0.174 Driving simulator 0.203 0.375 0.460 Real car 0.097 0.168 0.199 Driving simulator 0.125 0.271 0.366 Real car 0.101 0.163 0.188 Driving simulator 0.248 0.407 0.461 Real car 0.103 0.160 0.188 Driving simulator 0.244 0.419 0.448 b c d e
Table4.5 Average of maximum deceleration
Subject Vehicle Average of maximum deceleration [G]
a 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 0.089 0.075 0.078 Driving simulator 0.162 0.164 0.161 Real car 0.058 0.054 0.064 Driving simulator 0.158 0.182 0.194 Real car 0.064 0.056 0.063 Driving simulator 0.141 0.186 0.171 Real car 0.062 0.066 0.077 Driving simulator 0.163 0.210 0.194 Real car 0.064 0.064 0.070 Driving simulator 0.234 0.268 0.277 c d e
Subject Vehicle Standard deviation of maximum deceleration [G] a
b
Table4.6 Standard deviation of maximum deceleration
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0
10
20
30
40
50
60
Maximum deceleration[m/s]
V
el
oci
ty
(
decel
er
at
ion end)
[
m
/s
]
Real car
Driving simulator
49 同様に各被験者の減速イベント中の車間時間の分布を図4.12~4.14 に.分布の平均と標準偏差を表 4.7~4.8 に示す.なお,ここでも車間時間 6 秒以下のイベントデータのみを用いた. 図4.12~4.14 と表 4.7 から加速時と同様にドライビングシミュレータの車間時間の平均は実車両に比 べて小さくなる傾向があることがわかる.さらに図4.12~4.14 と表 4.8 から加速時の傾向よりは弱いも のの,標準偏差は大きくなる傾向があることが読み取れる.車間時間1 秒以下の減速イベントが実車 両に比べて多いことも共通している. これらのことから加速時と同様,ドライビングシミュレータの方が車間距離をとって走行している が速度を出しすぎてしまっているため,車間時間が短いと考えられる.また,ドライビングシミュレ ータでは安全性が確保されているため,被験者の緊張感が薄れてしまったため,車間時間1 秒以下の 減速イベントが頻繁に見られたと言える.
50
0
1
2
3
4
5
6
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.2
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.1
0.2
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.1
0.2
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
51
0
1
2
3
4
5
6
0
0.2
0.4
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.1
0.2
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.1
0.2
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
52
0
1
2
3
4
5
6
0
0.2
Fr
equency[
-]
Subject a
Real car
Driving simulator
0
1
2
3
4
5
6
0
0.2
0.4
Subject b
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject c
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject d
Fr
eq
ue
nc
y[
-]
0
1
2
3
4
5
6
0
0.2
0.4
Subject e
Time headway[s]
Fr
eq
ue
nc
y[
-]
53 0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 2.533 2.650 3.413 Driving simulator 2.527 1.975 2.215 Real car 3.321 3.540 2.563 Driving simulator 3.553 3.342 2.847 Real car 3.451 3.301 2.542 Driving simulator 3.137 3.114 3.196 Real car 2.736 2.646 2.104 Driving simulator 2.256 1.650 1.874 Real car 2.942 2.866 2.310 Driving simulator 2.477 2.054 2.294 a b c d e
Table4.7 Average of Time headway(deceleration) Subject Vehicle Average of Time headway [s]
0~20[km/h] 20~40[km/h] 40~60[km/h] Real car 1.268 1.615 1.637 Driving simulator 1.364 1.061 1.193 Real car 1.234 1.037 0.643 Driving simulator 1.358 1.340 1.642 Real car 1.269 1.265 0.760 Driving simulator 1.240 1.354 1.415 Real car 1.282 1.419 0.938 Driving simulator 1.160 1.028 1.203 Real car 1.141 1.212 0.739 Driving simulator 1.189 1.054 1.459 b c d e
Table4.8 Standard deviation of Time headway(deceleration) Subject Vehicle Standard deviation of Time headway [s]
54
4.3 まとめ
実車両とドライビングシミュレータで加減速行動の比較を行った結果,最大減速度の分布が大きく 異なることが判明した.これはブレーキペダルが実車両をうまく模擬できていないため,操作が難し いことに起因すると考えられる.最大加速度も実車両とドライビングシミュレータの速度感の違いか ら低速度域での分布の平均・標準偏差が異なることがわかった.また,ドライビングシミュレータで は安全性が確保されているため,ドライバの緊張感が薄れてしまい,車間時間1 秒以下という危険な 運転をたびたび行ってしまうことが判明した. これらのことからドライビングシミュレータと公道では同じ実験を行うことは難しいと考えられる. このため,評価対象の急ぎ運転検出手法がドライビングシミュレータにおいても急ぎ運転を検出可能 であるか確認し,リアルタイムでの評価が行えるか確認する.55