九州大学学術情報リポジトリ
Kyushu University Institutional Repository
船型データベースを活用した船尾伴流場設計法に関 する研究
一ノ瀬, 康雄
http://hdl.handle.net/2324/2236217
出版情報:九州大学, 2018, 博士(工学), 課程博士 バージョン:
権利関係:
船型データベースを活用した 船尾伴流場設計法に関する研究
平 成 31 年 1月
一 ノ 瀬 康 雄
i
目 次
第 1 章 緒 論 ··· 1
1.1 研究背景 ··· 1
1.2 船型設計手法の整理 ··· 3
1.3 従来研究 ··· 6
1.3.1 力、馬力に基づく船型設計手法(A) ··· 6
1.3.2 流場に基づく船型設計手法(B)··· 8
1.4 研究目的 ··· 15
1.5 論文構成 ··· 16
第 2 章 推 進 性 能 および船 尾 伴 流 場 評 価 手 法 と その精 度 検 証 ··· 18
2.1 緒言 ··· 18
2.2 評価手法 ··· 19
2.2.1 CFD計算手法 ··· 19
2.2.2 馬力の算定手法 ··· 20
2.3 CFD計算手法の検証 ··· 24
2.3.1 数値解析不確かさ ··· 25
2.3.2 水槽試験によるCFD計算の精度検証 ··· 28
2.4 結言 ··· 36
第 3 章 船 型 データベースの構 築 とその評 価 ··· 37
3.1 緒言 ··· 37
3.2 船型表現手法および船型変形手法の検討 ··· 38
3.2.1 船型ブレンディング ··· 39
3.2.2 2次元船型ブレンディング ··· 41
3.2.3 3次元船型ブレンディング ··· 43
3.3 船型データベース ··· 45
3.3.1 船型データベース(33CT DBおよび82BC DB) ··· 47
3.3.2 船型データベース(749GT) ··· 49
3.4 船型データベースの特徴 ··· 58
3.4.1 推進性能 ··· 58
3.4.2 船尾伴流場 ··· 66
3.5 結言 ··· 72
ii
第 4 章 船 尾 伴 流 場 の詳 細 解 析 ··· 73
4.1 緒言 ··· 73
4.2 従来研究 ··· 74
4.3 模型船レイノルズ数における船尾伴流場 ··· 75
4.4 実船レイノルズ数における船尾伴流場 ··· 86
4.5 結言 ··· 91
第 5 章 伴 流 設 計 システム ··· 92
5.1 緒言 ··· 92
5.2 伴流設計システム ··· 93
5.3 伴流設計システムの妥当性確認 ··· 96
5.4 伴流設計システムによる実用船型設計 ··· 100
5.4.1 理想伴流の設計 ··· 103
5.4.2 伴流設計システムの出力船型 ··· 107
5.4.3 水槽試験による有効性の確認 ··· 112
5.4.4 船尾伴流に関する詳細分析 ··· 118
5.5 結言 ··· 124
第 6 章 結 論 ··· 125
付 録 .A 修 正 Spalart-Allmaras ( MSA )モデル ··· 129
付 録 .B 749 総 トン型 一 般 貨 物 船 原 船 型 ··· 131
謝 辞 ··· 135
参 考 文 献 ··· 136
表 図 題 一 覧 ··· 146
iii
記号一覧
𝜌 水または海水の密度 [kg/m3] 𝑔 重力加速度 [m/s2]
𝜋 円周率
𝐿𝑊𝐿 水線長 [m]
𝐿𝑃𝑃 垂線間長 [m]
𝐵 船幅 [m]
𝑑 喫水 [m]
𝑥, 𝑦, 𝑧 𝐿𝑃𝑃で無次元化したデカルト座標(𝑥:船長方向(船首から船尾方向
が正)、𝑦:船幅方向、𝑧:高さ方向(右手系))
𝛻 排水容積 [m3]
𝛥 排水量(𝛥 = 𝜌𝛻) [ton]
𝐶𝐵 方形係数(𝐶𝐵= 𝛻/(𝐿𝑃𝑃𝐵𝑑))
𝑉𝑆 船速 [m/s]
𝜈 動粘性係数 [m2/s]
𝑅𝑒 レイノルズ数(𝑅𝑒 = 𝑉𝑆𝐿𝑃𝑃/𝜈) 𝐹𝑟 フルード数(𝐹𝑟 = 𝑉𝑆/√𝑔𝐿𝑃𝑃)
𝑢, 𝑣, 𝑤 𝑉𝑆で無次元化した流速の速度成分
𝐷 プロペラ直径 [m]
𝑅 プロペラ半径 [m]
𝑟 𝑅で無次元化したプロペラ座標系における半径位置
𝜃 プロペラ座標系における周方向位置(直上:0度)
𝛿𝜉, 𝛿𝜂, 𝛿𝜁 実数設計パラメータ
𝑞𝑟𝑖𝜃𝑗
⃗⃗⃗⃗⃗⃗⃗⃗⃗ 入力伴流の速度成分
𝑝⃗⃗⃗⃗⃗⃗⃗⃗⃗ 𝑟𝑖𝜃𝑗
𝑘 船型データ伴流の速度成分
𝑑𝑘 入力伴流と船型データ伴流とのユークリッド距離 𝑃⃗ 𝑘 離散化された船体表面離散点
𝑎𝑖 船型ブレンディングバラメータ
𝛼 ダクト翼素への流れの流入角 [deg.]
𝑦+ 摩擦速度で無次元化した壁面からの距離
iv 𝑆 船体の浸水表面積 [m2]
𝐿𝐶𝐵 浮心位置(%𝐿𝑃𝑃表示,船体中央より船尾側が正)
𝑅𝑇 全抵抗 [N]
𝐶𝑇 全抵抗係数(𝐶𝑇 = 𝑅𝑇/(1/2𝜌𝑉𝑆2𝑆)) 𝐶𝑊 造波抵抗係数
𝐶𝐹0 相当矩形平板の摩擦抵抗係数
∆𝐶𝐹 粗度修正係数
1 + 𝑘 形状影響係数
𝜂 推進効率
1 − 𝑡 推力減少係数
1 − 𝑤𝑆 実船の有効伴流係数
1 − 𝑤𝑇 模型船の有効伴流係数
𝜀 実船と模型船の伴流係数の尺度影響係数(𝜀 = (1 − 𝑤𝑆)/(1 − 𝑤𝑇)) 𝜂𝑅 プロペラ効率比
𝜂𝑂 プロペラ単独効率 𝑇 プロペラ推力 [N]
𝑉𝑎 プロペラ前進速度 [m/s]
𝐶𝑇𝐻 プロペラ荷重度(𝐶𝑇𝐻= 𝑇 (1/2𝜌𝑉⁄ 𝑎2𝜋𝑅2))
EHP 有効馬力 [kW]
DHP 伝達馬力 [kW]
BHP 制動馬力 [kW]
1
第 1 章 緒論
1.1 研究背景
船舶設計において適切な船尾伴流を実現することは、船舶の省エネルギー(以下 省エネ)化はもちろんのこと、船体振動の低減ならびに船内外の騒音抑制を図る上で 極めて重要である(例えば [1] [2] [3])。 隠しデータ( [4] [5] [6] [7] [8] [9] [10])
船舶の省エネ化は、経済的観点で見ると、船の一生涯における建造、運航、解撤 に係るコストの 3 分の1を占めると言われる燃料費の削減に直結する。このため、船舶 の省エネ化は、船舶工学において最も重要な研究課題の一つである。また、環境保 護の観点からも、地球温暖化ガス(GHG)の削減に寄与する船舶の省エネ化に対する 社会ニーズは強い。例えば、国際連合の専門組織である国際海事機関(IMO)の海洋 環 境 保 護 委 員 会 (MEPC)は 、 世 界 共 通 の 温 室 効 果 ガ ス (GHG)の 削 減 スキ ー ム
(MARPOL 条約の改正)を 2011 年に採択した。この GHG 削減スキームは、EEDI
(Energy Efficiency Design Index:エネルギー効率設計指標)と呼ばれる船舶の省エネ 性能を定量化した国際指標の導入により、2013年から400GT以上の全ての船舶に対 してこの EEDI の認証取得を義務化するものである。さらに、海洋環境保護委員会
(MEPC)は船舶の省エネ化を今後より促進するため、2018年4月に2050年までに国 際船舶からの温室効果ガス(GHG)の総排出量を 2008 年比で半減させるという野心 的な目標を採択した [4]。
このような船舶の省エネ化に対する強い社会ニーズを背景に、近年建造される船舶 の船尾には、多様な省エネ付加物が搭載されている(例えば [5] [6])。この省エネ付 加物は、作動条件である船尾伴流場の影響を強く受ける([6]〜 [10])。そのため、近 代的な船型設計においては船体の推進性能の向上だけでなく、省エネ付加物を含め た船舶全体の性能向上を目的とした船型設計が極めて重要である。
一方、近年船員の労働環境保護および船舶の放射ノイズがクジラなどの海洋生物 へ与える影響への国際的関心の高まり(例えば [11])に伴い、船体振動の低減ならび に船内外の騒音抑制に関する国際規制の議論が進んでいる。そのため、今後、船主
2
との契約条件により従来から厳しい振動・騒音基準に基づき設計していた客船等船種 に加え、振動・騒音の基準が比較的緩かった肥大船等の船種についても、厳しい振 動・騒音基準に基づく高度な船舶設計が求められる。船体振動および騒音の主たる 発生源は、主機振動とプロペラキャビテーションである。特にプロペラのキャビテーショ ンは、振動騒音問題とともにエロージョン(壊食)の発生ならびに推進効率の低下の複 合的問題を生じさせる重要な設計課題である [2]。プロペラキャビテーションの一般的 対策はプロペラ展開面積比の増加であるが、プロペラ展開面積比の増加には一般的 にプロペラ単独効率の低下が伴う [1]。そのため、船後プロペラのキャビテーション低 減に最も有効な対策法は、プロペラの作動条件である船尾形状により誘起される伴流 場の改善である。このように船型の誘起する船尾伴流場の改善は、船舶の省エネ化お よび振動騒音の主因となるプロペラキャビテーションの低減を両立させるための極めて 重要な設計課題である [2]。
本研究の目的は、省エネ付加物を含む船舶の省エネ化と船体振動および騒音の 低減に資する船尾伴流場設計法の開発である。本研究では、特に省エネ付加物の性 能向上とプロペラキャビテーションの低減を目的とした船尾伴流場設計法の開発を行 う 。 本 研 究 で 提 案 す る 設 計 法 は 、3 次 元 CAD(Computer-Aided Design) と CFD
(Computational Fluid Dynamics)計算の普及により、近年設計現場で大量に生成され
ている 3 次元船型データと CFD 計算流場をデータベースとして活用する船尾伴流場 設計法である。この設計現場の資産を活用した設計手法より、データベース蓄積に伴 い設計精度が向上し、かつ実用的な時間内での設計が可能な船尾伴流場設計法の 実現を目指す。
3
1.2 船型設計手法の整理
本研究で対象とする船型設計手法を「評価手法」と「評価対象」を基準として Table 1.1 に示すように整理する。なお、本研究で対象とする「2Bii. DB 流場逆設計」は、船 型設計に関する従来研究がない新しい分野である。
まず、評価手法には、「1. 数値シミュレーション(CFD)」と「2. データベース解析
(DB)」とがある。それぞれの評価手法の(強み)と(弱み)を挙げると次のようになる。
Table 1.1 An example of organizing the hull form design method.
評価手法 1. 数値シミュレーション
(CFD)
2. データベース解析
(DB)
評 価 対 象
( 目 的 関 数
)
A.
力
、 馬 力
( 積 分 値
)
1A. CFD設計 2A. DB設計
B.
流 場
i.
順 問 題
(
形 状→ 流 場)
1Bi. CFD流場順設計 2Bi. DB流場順設計
ii.
逆 問 題
(
流 場→ 形 状)
1Bii. CFD流場逆設計 2Bii. DB流場逆設計
(本研究の対象)
1. 数値シミュレーション(CFD)
(強み)
• 従来データのない形状に対しても、相応の評価が可能である。
(弱み)
• 評価精度を上げるためには、一般に高い計算コスト(計算時間)がかかる。
4 2. データベース解析(DB)
(強み)
• 数値シミュレーションと比較し、設計コストが小さい。(設計チャート(後述)等)
• 設計パラメータの変化に対する評価値の変化が明示的である。
• データベース解析により有用な知見が得られる。(船型可分原理(後述)等)
(弱み)
• データベースの外挿範囲に対する設計が困難である。
• データ収集と構築に相応の時間とコストが必要である。
受注産業である船舶の船型設計では、他の流体機械の設計と比較して設計期間が 短いことが多く、ときには数日の内に船型設計を実施する場合もある。このため計算機 能力が大幅に向上した現在も、数値シミュレーションに基づく船型設計とともに、デー タベース解析に基づく船型設計手法が比較的多くの設計現場で採用されている。
次に、評価対象を「A. 力、馬力(積分値)」と「B. 流場」に分けて整理する。船型設 計の評価関数(目的関数)は、抵抗値(力)、馬力など積分値で表現できる。このため、
一般に船型設計最適化問題の評価対象は、A の積分値のみで整理できる。このため、
提案されているほとんどの船型設計手法が「A. 力、馬力(積分値)」を評価対象とする。
しかし船型設計における積分値の評価は、模型船と実船との尺度影響等の未解明 な現象を含む不確実性の高い推進性能評価手法に基づき行われる。このため、船型 設計においては、流場とその物理現象の把握が極めて重要である(例えば [12])。実 際に、数多くの先進的な船型開発で実績をあげた塙は著書 [13]で、「船型設計を行 う場合、理論諸計算および水槽試験も重要ですが、ブラックボックスの答えだけを求め るのでなく、最も大切なことは、造波の源である船体表面上の圧力分布がどうなるかを、
設計者自身が考え、推定し、それを回流水槽で確かめて、船体形状と船体周り流れを 自分で理解することです。そして、諸計算および水槽試験成績の内容を、源を知ること で完全に把握し、設計に反映させるのです。勿論、粘性その他の問題についても同様 です。」と述べている。流場とその物理現象の把握を実現するためには、船型設計手 法の評価対象に「B. 流場」を加えることが必要である。評価対象に流場を加えることで、
より確実性のより高い船型設計が実現できることはもとより、流場現象の把握が可能と なり新しい設計アイディアの創出につながる。しかし、評価対象を流場とした船型設計 手法に関する研究は極めて少なく、本研究で対象とする船尾伴流場の設計は、現在
5
も熟練技術者の経験知に基づいた試行錯誤的手法により実施されている。
最後に、「i. 順問題」と「ii. 逆問題」の整理について述べる。評価対象を「B. 流場」
とした場合、評価対象の次元が馬力などの積分値と比較して高いため、評価対象であ る流場を設計システムの入力として使用し、この入力に対応する形状(船型)を求める いわゆる「ii. 逆問題」を解くことができる。なぜかというと、評価対象が馬力(積分値)な どの1次元の値の場合、同一の馬力を持つ船型が複数あるため船型形状が一意に定 まらない。一方、評価対象が船尾伴流場のような高次元ベクトル場合、この高次元ベク トルを満たす船型形状が一意に定まる可能性があるためである。本研究では、この「ii.
逆問題」を構築できる「B. 流場」の特徴を活かした船尾伴流場設計法を開発する。
参考文献の順番が変わらないようにここで始めに参考文献を参照しておく。
(例えば [14]) [15](例えば [16] [17] [18] [19] [20] [21] [22] [23] [24] [25] [26]
[27] [28] [29] [30] [31]) [32] [33]
6
1.3 従来研究
前節の船型設計手法の整理に基づき船型設計手法の従来研究について概観する。
1.3.1 力、馬力に基づく船型設計手法( A)
船型設計の評価対象を、「A. 力、馬力(積分値)」とする研究は、船型設計手法に 関する研究の主流をなす研究テーマであり数多くの研究が行われ成果をあげている。
① CFD設計(1A)
CFDに基づく船型最適化はSBD(Simulation Based Design)とも呼ばれ、水槽試験 と比較して多数の船型評価が安価にできるため、現在最も主流に研究されている船型 設計手法である(例えば [14])。
CFD に基づく船型最適化研究では、一般に設計システムを、性能評価ツール、形 状変形ツール、最適化ツールの三つで構成する [15]。ここで、性能評価ツールには、
ポテンシャル理論をベースに造波抵抗を推定するパネル法や、船尾伴流場の粘性影 響考慮できる Reynolds-averaged Naiver Stokes Equation(以下、RaNS)を基礎とした 数 値 計 算 手 法 が 採 用 さ れ る 。 最 適 化 ツ ー ル に は 、SQP(Sequential Quadratic Programming)または GA(Genetic Algorithm)といった単目的および多目的の非線形 最適化手法が適用される。これまで、三つのツールそれぞれに対して船型最適化に適 した手法の提案とその有効性の検証が行われ、数多くの有望な成果が得られている
(例えば [16]〜 [33])。
一方、CFD に基づく船型最適化手法の課題は、計算時間の長さと船型設計システ ムのブラックボックス化である。船型設計では前述のとおり数日の期間内に船型を決定 することがあるが、CFD に基づく船型最適化手法では一般に計算コストの高い CFD と 非線形最適化手法との組み合わせで設計システムを構築するため、一回の船型検討 に数週間の計算時間がかかることが多い。このため、計算時間の長さが制限となり CFDに基づく船型設計システムが設計現場に適用できないという課題がある。
次に、船型設計システムのブラックボックス化について述べる。線形造波抵抗理論 のように高度なモデル化により流体力学的現象を理論的に捉えられる計算手法に対 して、現在主流のRaNSを基礎としたCFD手法は船尾の複雑な剥離現象等の解析が できる代わりに、船型と剥離の関係性といった物理現象の理論的解明が一般に困難
7
である。また、CFD 手法と組み合わせる非線形最適化手法も、非線形現象の最適化 が実現できる代わりに、結果として出た最適船型がなぜ最適かといった原因の把握が、
一般に困難である。このように、RaNS を基礎とした CFD 手法と非線形最適化手法を 組み合わせる CFD に基づく船型最適化手法は、船型の設計過程が一般にブラック ボックス化される。
しかし、船型設計は模型船と実船との尺度影響等未解明で不確実性の高い推進性 能評価を基に実施される(例えば [34] [35])。このため、どの設計範囲で性能が極端 に悪化するか、または設計点においてその性能は安定的に発揮されるかといった設計 空間における性能分布や物理現象の把握に関わる情報は、設計者の意思決定に極 めて重要な意味を持つ(例えば [36] [37] [38])。そのため、船型の設計過程がブラッ クボックス化される CFD に基づく船型最適化手法から得られる設計情報は、設計者に とって参考となるものの設計者の意思決定には不十分である。このため、CFD に基づ く船型最適化手法は、計算時間の課題もあり、未だに造船所の設計現場に広く普及 していないと著者は考える。
② DB 設計(2A)
William Froude による実船と模型船との相似則の確立以降、数多くの水槽試験が
実施されている。水槽試験は実船実験と比較して安価に性能評価が行えることから、
系統的に船型を変更した水槽試験が多数実施され、その結果はデータベースとしてま とめられている。
水槽試験データベースとしてまず挙げられるものは、船の排水量比(𝛥/𝐿3)、柱形係 数(𝐶𝑃)、船幅と喫水の比(𝐵/𝑑)を系統的に変更した模型船の水槽試験結果を、速度 比(VS/√𝐿)と剰余抵抗との関係で整理した Taylor チャート [39]である。その後、Todd は方形係数(𝐶𝐵)、船長と船幅の比(𝐿/𝐵)、船幅と喫水の比(𝐵/𝑑)を系統的に変更し た約100隻の水槽試験結果をシリーズ60のチャート [40]として公表している。国内で は、山縣の図表 [41]、1955 年から約 10 年の期間をかけて製作された船舶技術研究 所の肥大船型に対する系統的模型試験結果 [42]、ならびに内航船に関する系統的 模型試験結果 [43] 等が代表的なチャート式の水槽試験データベースとして公表さ れている。これらの設計チャートを用いた船型設計手法は、数値シミュレーションと比 較して設計時間も短く設計コストが小さくため、現在も主要目の決定等、船型設計に 広く活用されている [44]。
8
これらの系統的な模型試験結果は、船型学をめざましく発展させた。その成果の一 つが船型可分原理 [45]の発見である。船型可分原理は良好に設計された肥大船型 では、船首 Entrance 曲線部が造波抵抗を、船尾 Run 曲線部が形状抵抗および自航 要素を主に支配するという、水槽試験データベースから導かれた船型と推進性能の関 係性である。船型可分原理により、従来船長船幅比および方形係数のみで構成され ていた図表は、船長方向の横断面積分布である𝐶𝑃カーブ形状を考慮した船型パラ メータに基づく図表に高度化された。多賀野 [46]は、造波抵抗理論を基に、多数の 実用船型の水槽試験結果を統計解析し、造波抵抗を主要目比と𝐶𝑃カーブから推定す る方法を提案し、推進性能に対して造波抵抗が支配的な方形係数(𝐶𝐵)が 0.55 から 0.65 のいわゆる痩型船に対して、提案手法により実用上十分な精度で造波抵抗が推 定できることを示した。また 1990 年代後半になると、ニューラルネットワーク等を応用し た水槽試験データベースの解析 手法および船型設計法の研究が松村 [47]、金井 [48]らにより実施されている。金井 [48]は、造波抵抗、形状抵抗といった抵抗要素だ けでなく、自航要素についても水槽試験データベースからニューラルネットワークを利 用した推進性能推定法を構築し、これを船型最適化に応用することで約 10%の伝達 馬力DHPの低減に成功している。これらの水槽試験データベースを活用した船型設計 法の研究は、推進性能を支配する不変的な船型パラメータの発見およびその定式化 と、時代とともに高性能化する性能データの解析により発展し、船舶の高性能化に貢 献している。
しかし、これらの設計チャートおよびデータベースは、省エネ付加物等のない裸殻 状態を対象としたデータベースであり、近年ほとんどの肥大船で採用されている省エネ 付加物との干渉を踏まえた設計には直接的に使用できない。さらに、これらの設計 チャートおよびデータベースは全抵抗値のような積分値を対象としたものであり、キャビ テーションの低減といった流場に関わる船型設計への応用は困難である。そのため、
近代的なプロペラ・省エネ付加物に適した船型の設計に必要な流場情報を含む船型 データベースの拡張および、この船型データベースを用いた設計手法の確立が求め られている。
1.3.2 流場に基づく船型設計手法(B)
船型設計の評価対象に「B. 流場」を採用することは、流場とその物理現象の把握 の観点から極めて重要である。しかし、評価対象を流場とした船型設計手法に関する
9
研究は極めて少なく、本研究で対象とする船尾伴流場の設計は、現在も熟練技術者 の経験知に基づいた試行錯誤的手法により実施されている。これは、船型設計の目 的である省エネ化等に対して流場は間接的な評価関数(目的関数)であり、「A. 力、
馬力(積分値)」と比較してその評価の取り扱いが難しく、また流場に基づく船型設計 手法がそれ単独ではなく力、馬力に基づく船型設計手法と組み合わせにおいてのみ 船型設計手法として成立するためである。
しかし、船型設計では流場現象の把握が極めて重要であり、流場に基づく船型設 計手法の確立が必要である。また、近年 PIV 等の工学的計測法(例えば [49] [50]
[51])およびCFDの発展(例えば [51] [52] [53])に伴い、船尾伴流場と省エネ付加物
の干渉効果および作動原理が流場データから明らかになりつつある。例えばダクト型 省エネ付加物の場合、船型形状が誘起する伴流のダクト翼素への流入角の周方向分 布がダクトの省エネ効果に強い影響を与えることがわかっている([6]〜 [10])。これら の知見を船型設計に反映させるためには、流場に基づく船型設計手法の確立が必要 である。
本項では、これらの流場に基づく船型設計手法について、前節の整理に従い従来 研究を概観する。
① CFD流場順設計(1Bi)
流場、特に大規模 3 次元剥離を伴う船尾伴流場の推定には、RaNS に基づく CFD が有効である。Van der Ploeg [3]は、キャビテーション低減に資する伴流場の改善と
DHPの最小化を目的として、CFD と最適化理論を組み合わせた CFD 設計(1A)のフ
レームワークを応用し、DHPと船尾伴流場の多目的最適化を実施している。船尾伴流 場の取り扱いは、伴流分布のプロペラ主方向のプロペラ流入角の周方向 1 次微分の プロペラ面平均値となる積分値としており本研究で定義する流場設計と厳密には異な るものの、船尾伴流場を評価対象(目的関数)としている点が興味深い。しかし、この 研究は、本研究で対象とする省エネ付加物の性能向上は設計目的として含まれてお らず、また CFD設計(1A)と同様に計算時間の長さに課題がある。
② DB 流場順設計(2Bi)
流場データベースの構築に向けた取り組みとして、まず挙げられるのは日本造船研 究協会において 1984 年から実施された SR196「船尾形状設計法(粘性流場)に関す
10
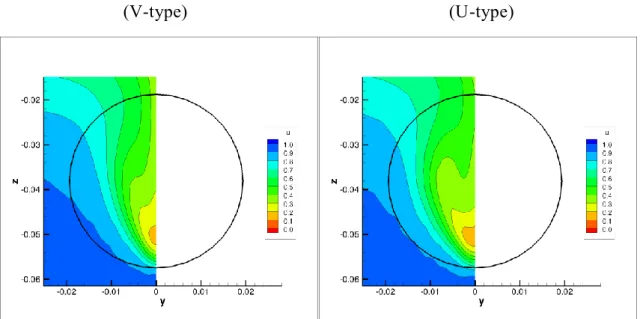
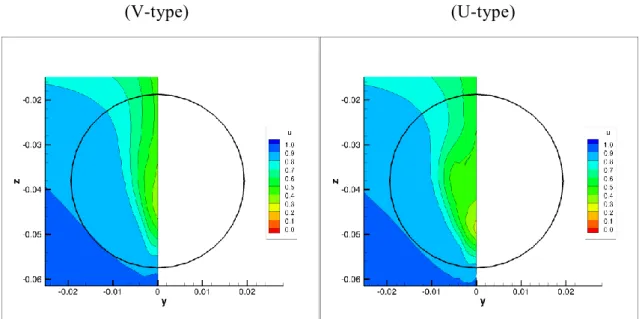
る研究」 [54]である。この研究では、異なる船尾フレームライン形状を持つ6船型につ いて、境界層理論および RaNS に基づく理論検討、系統的模型試験による粘性抵抗 および伴流分布の詳細な調査が行われた。その結果、当時主流であった船体抵抗を 低減させる V 型の船尾フレームライン船型に対して、伴流係数を改善するプロペラ軸 と同心の船尾縦渦を形成する U 型の船尾フレームライン船型の推進性能上の優位性 が認識され、これらの成果により船尾伴流場設計の推進性能に対する重要性が確認 された。
Kimら [55]は、肥大船と痩せ型船型を合わせて20隻の船型形状とプロペラ面の伴
流分布(水槽試験結果)との船型データベースを構築し Neuro-fuzzy system による伴 流場推定システム(Fig. 1.1)を開発した。システムで推定したプロペラ軸方向伴流のプ
ロペラ70%位置の周方向分布と比較対象との検証結果をFig. 1.2に示す。システム推
定伴流は伴流分布の定性的な傾向は捉えられているものの、定量的には最大 0.3 以 上の推定誤差がある。これは 20 隻の水槽試験結果では、船型データベースを構成す るデータ数としては少なすぎることを示している。このため推定精度を向上させるため にはデータ数を増やす必要がある。しかし、水槽試験による数百、数千程度の船型と 船尾伴流場のデータベースの構築には、大きなコストがかかるためその実現は困難で ある。
これに対して、本研究では近年設計現場で大量に生成されている 3 次元船型デー タと CFD 計算流場をデータベースとして活用し、最大 3,000 船型程度の船型データ ベースを構築することにより、データ数の課題を克服する。
またこの DB 流場順設計は、船型を入力として、この船型が誘起する船尾伴流を出 力として推定するもとで、所望の伴流を実現するための船型を提示する手法ではなく、
所望の船尾伴流を実現するためには試行錯誤的手法による船型設計を必要とする。
11
Fig. 1.1 Structure of neuro-fuzzy system for wake distrtribution [55].
Fig. 1.2 Comparison of axial wake distribution between target and inferred [55].
③ CFD流場逆設計(1Bii)
評価対象を「B. 流場」とした場合、流場を入力としてそれに対応する形状(船型)を 求めることが可能となる。これは、同一の馬力を持つ船型が複数あり、形状が一意に定 まらない「A. 力、馬力(積分値)」とは異なる、評価対象を「B. 流場」とした場合の強み である。しかし、船尾伴流場は大規模な剥離現象を伴う、極めて非線形な流場である ため、所望の船尾伴流場から対応する船型を求める、いわゆる逆問題を解くことは一 般に困難である。そのため、CFD流場逆設計では船型表現に強い制約がかかる。
12
Stuck ら [56]は、Adjoint 法により RaNS の逆問題を解き、所望の伴流分布を実現
する手法を提案している。これらの CFD を活用した船尾伴流設計法は、現在の試行 錯誤的な伴流設計に非常に対して有用である。所望の伴流分布を持つ船型を得るた めに毎回多数のCFD計算を行う必要があり、時間的な制約条件の厳しい実用の船型 設計での使用に課題がある。
Chen ら [57]は、船型形状の自由度に制約を持たせ Levenberg-Marquardt 法によ り、RaNS の逆問題を解くことで、所望の伴流分布を実現する手法を提案している。
Chen らの手法により設計した船型の伴流と検証対象伴流との比較を、コンテナ船(痩 せ型船型:Fig. 1.3)とバルクキャリア(肥大船型:Fig. 1.4)に分けて図に示す。痩せ型 船型であるコンテナ船(Fig. 1.3)ではかなり高い精度で伴流設計が実施されており、検 証対象と設計船型の伴流の相対平均誤差は 2%である。一方、船尾で大規模な 3 次 元剥離が発生しやすい肥大船型であるバルクキャリア(肥大船型:Fig. 1.4)では、検証 伴流との差が痩せ型船型と比較して大きく、検証対象と設計船型の伴流の相対平均
誤差は11%である。
Fig. 1.3 Axial wake distribution within propeller disk for estimated and target hull in Hamburg container vessel [57].
13
Fig. 1.4 Axial wake distribution within propeller disk for estimated and target hull in Post Panamax beam’s bulk carrier [57].
これらの結果から CFD 流場逆設計は船尾伴流場設計手法として有望であるものの、
計算時間の長さと船型表現(船型の自由度)の制約に課題がある。
④ DB 流場逆設計(2Bii)
本研究で対象とするのはこの DB 流場逆設計である。CFD の実用化に伴い設計現 場には近年、従来にない多量の船型群および細密な船型・流場データが生成されて いる。本研究ではこの船型・流場データから船型データベースを構築し、流場から船 型を設計する逆問題を解く船尾伴流場の設計手法を提案する。CFD 計算では、船体 表面圧力等の流場データは、水槽試験と異なり特別にセンサーをつけて計測しなくて も、常に算定・評価されている値である。そのため、CFD 計算結果をデータベースとす ることは、造船所の過去の設計資産を活用することにもつながる。しかし、この船型設 計に極めて有用な流場データを船型設計に応用する手法の従来研究はない。
このDB流場逆設計には、三つの強みがある。
まず一つは計算時間の短さで、本研究で構築する DB流場逆設計に基づく船尾伴 流場設計手法は、事前に船型データベースを構築しておくことで、数十分程度で所望 の船尾伴流を実現する船型が得られる。これは、一回の船型検討に数週間の計算時 間がかかることが多いCFDに基づく船型設計法に対して強みとなる。
14
次に二つ目は、評価対象を「B. 流場」にした設計手法であるため、流場設計による 流場現象を理解した船型設計とデータベース解析による知見の創出ができることであ る。
三つ目は、所望の船尾伴流場から対応する船型を求めるいわゆる逆問題を解くた め、従来試行錯誤的手法により実施されていた船尾伴流が自動化されることである。
本研究では、DB流場逆設計に基づく船尾伴流場設計手法の開発として、RaNS を 基礎とした CFD から推定した流場情報を、船型データベースとしてとりまとめ、その解 析を行うことで物理現象の把握に資する船尾伴流場の設計手法を開発する。
15
1.4 研究目的
本研究の目的は、以下の二つである。
1. RaNS を基礎とした CFD による流場情報の大規模船型データベース(最大 2,730隻)の構築
2. データベース蓄積に伴い設計精度を向上させることができるプロペラおよび省 エネ付加物に適した船尾伴流場の実用的な設計手法の開発
この研究目的を達成するために、以下の4項目を実施する。
1. 水槽試験との比較によるCFD計算の不確かさ解析および精度検証 2. 大規模船型データベースの構築と、その妥当性および特徴の確認 3. 船型データベースを用いた船尾流場の詳細解析による流場特性の確認 4. 船尾伴流場法(伴流設計システム)の提案と実証設計による有効性の確認
• 実証設計の設計目的
① ダクト型省エネ付加物の省エネ効果の改善
② プロペラキャビテーションの低減
• 有効性の実証方法
伴流設計システムで設計した船型の模型船を製作し、システム出力船型の 水槽試験を実施する。この結果から設計目的の達成とシステムの有効性に ついて確認する。
16
1.5 論文構成
本論文は、「船型データベースを活用した船尾伴流場設計法に関する研究」と題し、
6章で構成されている。
第1章は緒論であり、本研究の必要性ならびに関連する研究を整理して概説し、船 尾伴流場設計法に関する研究課題について述べるとともに、本研究の目的と論文構 成を示す。
第 2 章では、まず本研究で使用する推進性能および船尾伴流場の評価手法につ いて詳説するとともに、CFD 計算手法の不確かさ解析および、水槽試験による精度検 証を実施し、本研究で使用する数値解析手法とその計算精度について詳細に議論す る。
第 3 章では、船型データベースの構築手法と船型データベースの概要について整 理する。まず過去の設計資産を活用しながら大規模な船型データベースを効率的に 構築することできる船型ブレンディング法についてその詳細を述べる。次に、本研究の 対象船型である載貨重量 33,000 トンのケミカルタンカー(以下、33CT)、82,000 トンの バルクキャリア(82BC)および 749 総トン型一般貨物船(749GT)の 3 船型の船型デー タベースの特徴について議論する。
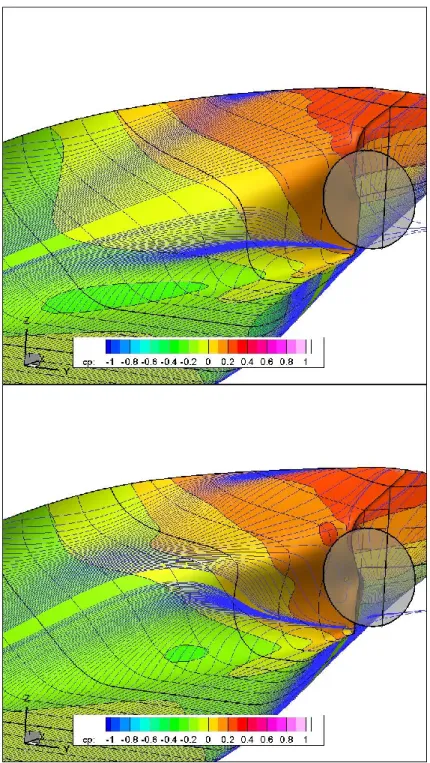
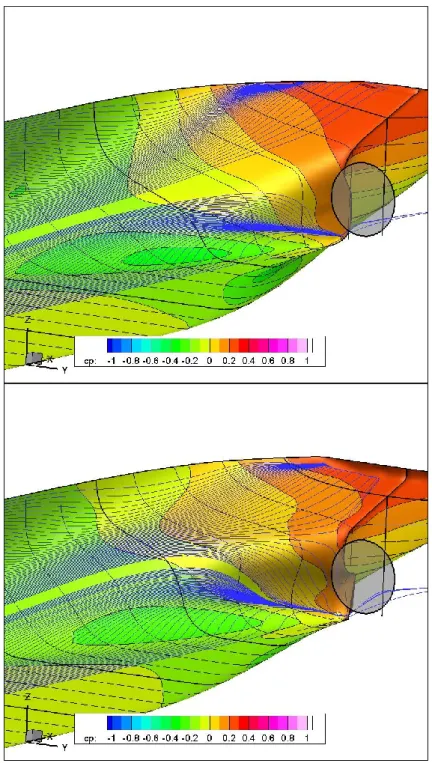
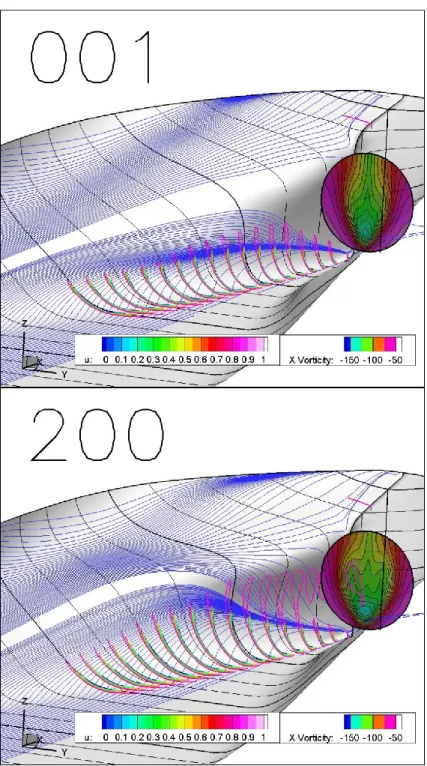
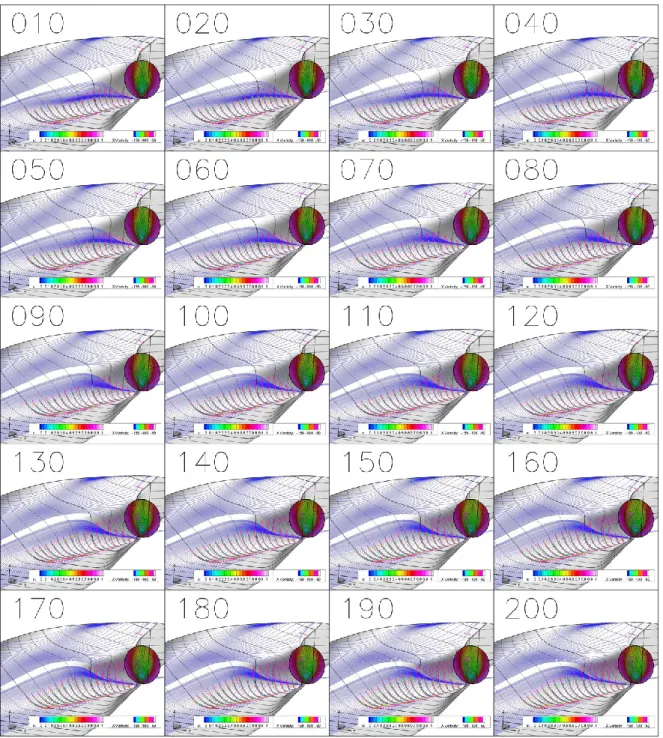
第4章では、本研究で対象とする船型と船尾伴流場の関係について詳細に議論す る。まず、境界層理論を含む船尾フレームライン形状に関する従来研究を概観する。
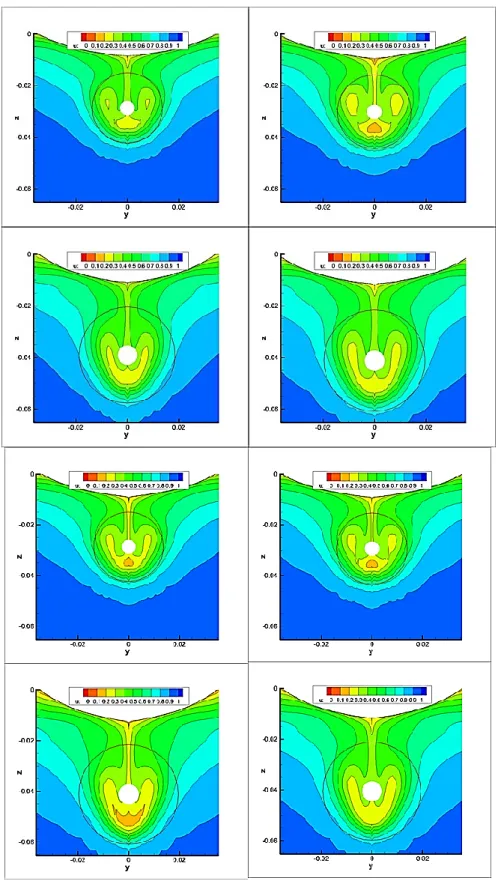
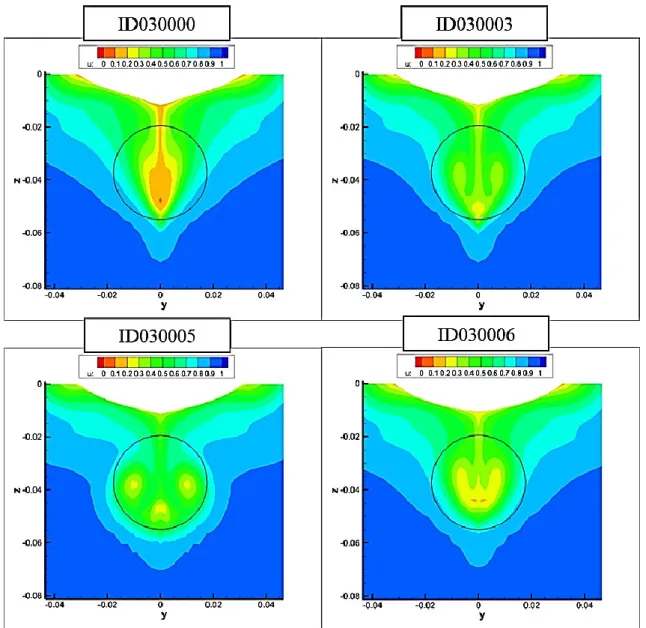
次に、船尾フレームライン形状を V 型から U 型に系統的かつ連続的に変化させた船 型データベースを対象に U 型船型の圧力コンター線の傾斜と負圧部の拡大などの船 尾流場と船尾フレームライン形状との関係、また船型変更と船尾流場の連続性につい て詳細に議論する。
第 5 章では、前章までの成果を基礎に船型データベースの設計応用手法として、
熟練技術者の試行錯誤により従来行われてきた船尾伴流設計に対して、船型データ ベースを活用した船尾伴流場法(伴流設計システム)を提案し、その有効性を検証す
17
る。まず、1 個抜き交差検証により伴流設計法のデータベース解析手法としての妥当 性を検証する。次に実設計での伴流設計システムの有効性の実証として、ダクト型省 エネ付加物の省エネ効果の改善とプロペラキャビテーションの低減を目的として設計 する理想伴流を入力伴流として提案の伴流設計システムにより船型設計を行い、設計 した船型において目的とした改善効果が得られているかを、水槽試験による伴流計測、
推進性能試験で確認する。
第6章は結論であり、本研究で得られた成果をまとめ、今後の課題を示す。
18
第 2 章 推進性能および船尾伴流場評価手法と その精度検証
2.1 緒言
本章では、本研究で使用する推進性能および船尾伴流場の評価手法について詳 説するとともに、評価手法の検証を行う。
2.2 節では、上記評価手法についてその詳細を述べる。本研究では粘性影響の強 い船尾伴流場の流場推定および推進性能評価を行うため、対象とする流場の支配方 程式を 3 次元 RaNS 方程式とする。また、本研究で実施する馬力算定の手法につい てその詳細を述べる。
2.3節では、CFD計算手法の検証を行う。まず、ITTC Recommended Procedures and
Guidelines [58] に記載の手法に基づき、本研究で使用する計算手法の数値解析不
確かさを求める。次に、船型データベースを作成する載貨重量33,000トンのケミカルタ ンカー(33CT)、82,000 トンのバルクキャリア(82BC)および 749 総トン型一般貨物船
(749GT)の 3 船型について、数値解析と大型模型船を用いた水槽試験を行い、本研 究で使用するCFD計算手法の精度検証を行う。
19
2.2 評価手法
2.2.1 CFD 計算手法
本研究で対象とする船体周りの流場の支配方程式は、(2.1)式で表される疑似圧縮 性を導入した保存形式の3次元 RaNS方程式である。
𝜕𝑞
𝜕𝑡 +𝜕(ⅇ − ⅇ𝑣)
𝜕𝑥 +𝜕(𝑓 − 𝑓𝑣)
𝜕𝑦 +𝜕(𝑔 − 𝑔𝑣)
𝜕𝑧 + ℎ = 0 (2.1)
𝑞 = [ 𝑝 𝑢 𝑣 𝑤
], [ⅇ, 𝑓, 𝑔] = [
𝛽𝑢 𝛽𝑣 𝛽𝑤
𝑢2+ 𝑝 𝜈𝑢 𝑤𝑢
𝑢𝑣 𝑣2 + 𝑝 𝑤𝑣
𝑢𝑤 𝑣𝑤 𝑤2+ 𝑝]
, ℎ = [ 0 𝑓𝑥 𝑓𝑦 𝑓𝑧
]
[ⅇ𝑣, 𝑓𝑣, 𝑔𝑣] = [
0 0 0
𝜏𝑥𝑥 𝜏𝑦𝑥 𝜏𝑧𝑥 𝜏𝑥𝑦 𝜏𝑦𝑦 𝜏𝑧𝑦 𝜏𝑥𝑧 𝜏𝑦𝑧 𝜏𝑧𝑧
] , 𝜏𝑖𝑗 = (1
𝑅𝑒+ 𝜈𝑡) (𝜕𝑢𝑖
𝜕𝑥𝑗 +𝜕𝑢𝑗
𝜕𝑥𝑖)
(2.2)
ここで、𝛽は疑似圧縮性パラメータ、𝑝は圧力、𝑢、𝑣、𝑤は𝑥、𝑦、𝑧方向1の速度、𝑅𝑒はレイ ノルズ数、𝑣𝑡は渦動粘性係数である。また、𝑓𝑥、𝑓𝑦、𝑓𝑧はプロペラが𝑥、𝑦、𝑧方向に発生 する推力(体積力)を表し、本研究では無限翼数プロペラ理論に基づく簡易プロペラ モデル [59]で推定する。
本研究では、海上技術安全研究所(以下、海技研)開発の NEPTUNE [60]および、
NEPTUNEに対して重合格子対応等の機能強化を実施したNAGISA [61] [62]を3次
元RaNS方程式の計算ソルバーとして使用する。NEPTUNEおよびNAGISAは、(2.1) 式を有限体積法により離散化した方程式の数値解を算定する。ここで、空間離散化は 流体変数をセル中心に配置した構造格子で行う。対流項(ⅇ, 𝑓, 𝑔)は、Roe 法に基づ く 3 次風上差分(MUSCL type)で、拡散項(ⅇ𝑣, 𝑓𝑣, 𝑔𝑣)は 2 次の中心差分でそれぞれ 離散化しており、時間微分の離散化は陰解法の1次後退差分である。また、本研究で は自由表面の計算に、Level-Set法を採用する。
本研究では乱流モデルとして、修正 Spalart-Allmaras(MSA)モデル [63]を採用し
1 𝐿𝑃𝑃で無次元化したデカルト座標(𝑥:船長方向(船首から船尾方向が正)、𝑦:船幅方 向、𝑧:高さ方向(右手系))
20
た。修正 Spalart-Allmaras(MSA)モデルの詳細を付録.A に記す。この乱流モデルの
採用理由は、この乱流モデルが計算の安定性に優れており、また海技研での船型設 計における適用実績 [64] [65]が豊富で、実船スケールの計算についても平田ら [66]
により 200,000DWT タンカー龍光丸を対象とした実測データとの検証が行われている
ためである。なお、物体壁面第 1 層の境界層の厚み方向の格子間隔は、𝑦+ < 1とし、
壁関数モデルは採用せず、また付録.A の(A1.2)式に含まれる係数𝐶𝑉𝑂𝑅は、水槽試験 結果の伴流分布との比較によって10 に設定する。
本研究では、回転するプロペラ周りの流れを直接計算するのではなく、プロペラを、
体積力を発生させるプロペラ面としてモデル化し、RaNS 方程式に体積力分布を与え、
自航状態の数値解を算定した。なお、体積分布は、無限翼数プロペラ理論に基づくモ デル [59]で算定した。
計算格子について述べる。船体周りの格子は、船長𝐿𝑃𝑃で無次元化されており、計 算領域は、船首から上流に1.5船長、船尾から下流に2.5船長、幅方向に1.5船長で ある。計算格子は、模型船レイノルズ数に対応した計算では HO 型トポロジー、実船レ イノルズ数に対応した計算では OO 型トポロジーの構造格子を採用し、境界層方向第 1層目の格子間隔は、両レイノルズ数ともに𝑦+ < 1として、壁関数は使用していない。
なお、構造格子の生成には海技研と有限会社エイ・シー・ティーとが共同開発した
AutoDes [67]を採用し、半自動的に均一品質の格子を生成した。
2.2.2 馬力の算定手法
実 船 の馬 力 算 定 手 法 について述 べる。 本 研 究 では、749 総 トン型 一 般 貨 物 船
(749GT)のみに対して馬力算定を行う。そのため、本項で示す係数は、749GT を対象 としたものである。
制動馬力(BHP)は、軸系の伝達効率(𝜂𝑇)と伝達馬力(DHP)により(2.3)式で算定す る。本研究では、伝達効率(𝜂𝑇)として軸受け等による損失 1/1.03 に減速逆転機のギ ア損失として 1/1.02を乗じた値を採用する。
BHP = DHP/𝜂𝑇 (2.3)
伝達馬力 (DHP)は、有効馬力(EHP)と推進効率(𝜂)で算定し、推進効率 (𝜂)は
21
(2.5)式のとおり、推力減少係数(1 − 𝑡)、実船の有効伴流係数(1 − 𝑤𝑆)、プロペラ効
率比(𝜂𝑅)およびプロペラ単独効率(𝜂𝑂)を用いて算定する。ここで、推力減少係数
(1 − 𝑡)は、船尾後方においてプロペラが作動することにより、船体後部の流れが加速
され圧力低下が発生し船体抵抗が増加する現象に関する係数であり、実船または模 型船の有効伴流係数(1 − 𝑤𝑆または1 − 𝑤𝑇)は、プロペラ面に流入する流速と船速と の比率を表す係数で、プロペラ効率比(𝜂𝑅)は、一様流中を単独で作動するプロペラ のトルクと船後流場で作動するプロペラトルクとの比である。なお、(2.5)式よりわかると おり、1 − 𝑡が大きいほど(推力減少率(𝑡)が小さいほど)、1 − 𝑤𝑆が小さいほど(有効伴 流率(𝑤𝑆)が大きいほど)、推進効率は高くなる。
DHP = EHP/𝜂 (2.4)
𝜂 = 1 − 𝑡
1 − 𝑤𝑆𝜂𝑂𝜂𝑅 (2.5)
実船の有効伴流係数(1 − 𝑤𝑆)は、模型船の有効伴流係数(1 − 𝑤𝑇)に伴流率の尺 度影響係数 (𝜀)を乗じて推定する。伴流率の尺度影響係数 (𝜀)には、矢崎チャート [68] から得られる値に、経験定数として1/1.03 を乗じた値を採用する。
有効馬力(EHP)は、無次元化された全抵抗係数(𝐶𝑇)から(2.6)式で算定され、実船 の全抵抗係数(𝐶𝑇)は、造波抵抗係数(𝐶𝑊)、相当矩形平板の摩擦抵抗係数(𝐶𝐹0)、
粗度修正係数(∆𝐶𝐹)および形状影響係数(1 + 𝑘)から(2.7)式で算定する。
EHP = 1
2𝜌𝑉𝑆3𝑆 ∙ 𝐶𝑇 (2.6)
𝐶𝑇 = 𝐶𝑊+ (1 + 𝑘) ∙ 𝐶𝐹0+ Δ𝐶𝐹 (2.7)
ここで、𝜌 は水または海水の密度、𝑆 は船体の浸水表面積である。また本研究では、
749GT に対する粗度修正係数として、∆𝐶𝐹 = 0.4 × 10−3を、相当矩形平板の摩擦抵
抗係数(𝐶𝐹0)は、Schoenherrの式 [69]を採用する。
また、造波抵抗係数(𝐶𝑊)、形状影響係数(1 + 𝑘)、推力減少係数(1 − 𝑡)、実船の 有効伴流係数(1 − 𝑤𝑆)、プロペラ効率比𝜂𝑅は、水槽試験結果がある場合には水槽試
22
験結果を採用し、CFD計算結果のみの利用可能な場合にはCFD計算結果を水槽試 験から得られた修正係数(Correlation Factor)で補正した値を採用する。修正係数の
詳細は2.3.2 項で述べる。
次に、プロペラ単独効率(𝜂𝑂)の算定手法について述べる。水槽試験結果が利用可 能な場合には、水槽試験結果で得られたプロペラ単独性能曲線から作動点のプロペ ラ単独効率(𝜂𝑂)を算定する。一方、CFD 計算結果のみ利用可能な場合には、プロペ ラの作動点でのプロペラ荷重度(𝐶𝑇𝐻)から(2.8)式で算定される運動量理論の理想効
率(𝜂𝑜𝑝𝑡−𝑖𝑑𝑒𝑎𝑙)と 749GT 設計プロペラの効率(𝜂𝑜𝑝𝑡)の比を基準に、対象船型のプロペ
ラ作動点でのプロペラ荷重度(𝐶𝑇𝐻)から算定される運動量理論の理想効率(𝜂𝑂−𝑖𝑑𝑒𝑎𝑙) を用いて(2.9)式で簡易算定する。
𝜂𝑂−𝑖𝑑𝑒𝑎𝑙= 2 1 + √1 + 𝐶𝑇𝐻
(2.8) 𝜂𝑂 = 𝜂𝑂−𝑖𝑑𝑒𝑎𝑙× 𝜂𝑜𝑝𝑡/𝜂𝑜𝑝𝑡−𝑖𝑑𝑒𝑎𝑙 (2.9)
Fig. 2.1 に MAUプロペラチャートと理想効率(𝜂𝑜𝑝𝑡−𝑖𝑑𝑒𝑎𝑙)と関係を一例として示す。
749GTの設計条件において設計船速付近のプロペラ効率は0.5から0.6程度であり、
本研究で採用した𝜂𝑜𝑝𝑡/𝜂𝑜𝑝𝑡−𝑖𝑑𝑒𝑎𝑙は 0.779である。
23
Fig. 2.1 Comparison of propeller efficiency between MAU series propeller and ideal efficiency [70].
24
2.3 CFD 計算手法の検証
本計算手法の検証として不確かさ解析を実施する。本研究で採用した不確かさ解 析の手法は、ITTC Recommended Procedures and Guidelines [58] に記載の手法で、
Roache [71]によって提案されたFactor of Safety(FS)を用いる方法をベースとしている。
本研究の対象船は、載貨重量33,000 トンのケミカルタンカー(33CT)、82,000トンの バルクキャリア(82BC)および749総トン型一般貨物船(749GT)の3船型である。Table 2.1 に3船型の主要目を示す。
Table 2.1 Principal dimensions of object ships.
33CT 82BC 749GT
𝐿𝑃𝑃 [m] 170.5 222.0 79.0
𝐵 [m] 27.7 32.3 13.0
𝑑 [m] 10.0 12.2 4.7
𝐶𝐵 0.79 0.87 0.72
MS No. 852 842 869
Model 𝐿𝑃𝑃 [m] 6.200 7.631 6.771
Model Scale 1 / 27.50 1 / 29.09 1 / 11.67
Date of Model Test March, 2015 March, 2013 December, 2016
なお、本研究では 749GT について 2 船型の水槽試験を実施する。一つは本章で
述べる 749GT 原船型であり、もう一つは第 5 章で述べる本研究で提案する伴流設計
システムの出力船型(改良船型)である。本章で述べる 749GT 原船型は、著者が研究 開発に参加した「日本船舶海洋工学会の内航海運のための省エネ母船型の研究開 発プロジェクト」 [72](以下、内航船プロジェクトと記す)で開発された船型であり、詳細 を付録.Bに記す。この 749GT 原船型は、従来研究の CFDを活用した船型最適化研 究の成果を反映した船型(MS No. 869)で、省エネ付加物を搭載しない裸殻状態にお いて 1990 年に建造された船を基準に 38.1%の CO2排出量削減を達成した高い省エ ネ性能を有する優秀船型である。
本節では、原船型とするこれら3船型のCFD結果と水槽試験結果の比較検証を行
25
うとともに、749GT 船型に対して格子スタディを行い、本研究で採用した格子および CFDの数値解析不確かさを算定した。
2.3.1 数値解析不確かさ
749GT船型を対象に、本研究の計算格子およびCFD計算の数値解析不確かさ解
析を実施した。計算格子は、満載・トリムなしの喫水状態に対して、HO 型トポロジー 180 万セル(両舷:Condition(A))の構造格子で、船首上流側 24 セル、船長方向 104 セル、船尾下流側 48セル、境界層方向に80セルとし、二重模型流れに対してガース 方向128セル(両舷)、造波計算に対しては3%船長程度の乾舷をとり128セル(両舷)
で構成されている。境界層方向第1層目の格子間隔は、𝑦+ < 1である。Fig. 2.2 に格 子例を示す。
Fig. 2.2 An example of CFD gird.
26
一方、33CT および 82BC についても 749GT 船型と基本的に同じの計算格子を生 成する。ただし、33CT および 82BC については、模型船と実船のレイノルズ数影響を 含む船尾流場の詳細解析を実施するデータベースの構築を目的とし、特に着目する 満載トリムなしのプロペラ周りの流場に対しては造波の影響は小さく無視できるものとし て、二重模型流れを計算対象とした。このとき、模型船レイノルズ数に対し、160万セル
(i×j×k=209×97×81: 両舷)の HO 型トポロジー構造格子、実船レイノルズ数に対し 240 万セル(i×j×k=321×73×105:33CT 船型)、220 万セル(i×j×k=321×73×97:82BC 船型)のOO 型トポロジー構造格子をそれぞれ採用した。
749GT 船型に対する格子スタディの結果を Table 2.2 に示す。ここで、𝐶𝑇𝐷𝑀は二重
模型流れの抵抗係数、𝐶𝑇𝐹𝑆は造波計算の抵抗係数、𝐶𝑊は造波抵抗係数で、CFD で は𝐶𝑇𝐹𝑆−𝐶𝑇𝐷𝑀で評価する。また、Conditions は船長、ガース方向、境界層方向の格子 数を表す。相当矩形平板の摩擦抵抗係数(𝐶𝐹0)には CFD、水槽試験(EFD)ともに
Schoenherr の式 を採 用 する。EFD と CFD とのレイノルズ数 (𝑅𝑒) の差 (それぞれ
1.11×107、1.00×107)は水温の季節変動の範囲内である。なお、水槽試験(EFD)とは、
2.3.2 項に詳説する水槽試験である。
数値計算不確かさ𝑈𝑆𝑁を𝑈𝑆𝑁2 = 𝑈𝑆𝐺2 + 𝑈𝑆𝐼2で算定した結果を Table 2.3 に示す。ここ で、𝑈𝑆𝐺は計算格子に起因する不確かさ、𝑈𝑆𝐼は反復計算に起因する不確かさである。
また、CFD では造波抵抗係数𝐶𝑊= 𝐶𝑇𝐹𝑆− 𝐶𝑇𝐷𝑀で評価するため、造波抵抗係数の不 確かさ𝑈𝑆𝐶𝑊は、二重模型流れの抵抗値の不確かさ𝑈𝑆𝐷𝑀と造波計算の抵抗値の不確 かさ𝑈𝑆𝐹𝑆から𝑈𝑆𝐶𝑊2 = 𝑈𝑆𝐷𝑀2 + 𝑈𝑆𝐹𝑆2 で算定する。Table 2.3から抵抗値、自航要素に対す る𝑈𝑆𝑁は概ね数%の範囲にあり、本研究で構築する予定のデータベースの船型データ 数(数百〜数千)の計算規模を考慮すれば、本研究のCFD計算手法および格子は妥 当な数値解析不確かさレベルを有している。
27
Table 2.2 Resistance and self-propulsion factor for grid uncertainty analysis.
Fr=0, Re=1.00×107 Fr=0.222, Re=1.00×107
(A) (B) (C) (D) (A) (B) (C) (D)
Conditions
176×128
×80
240×128
×80
176×176
×80
240×176
×112
176×128
×80
240×128
×80
176×176
×80
240×176
×112
CTDM×103 3.6027 3.5309 3.6016 3.5465 - - - -
CTFS×103 - - - - 3.7392 3.6261 3.7453 3.6435
CW×103 - - - - 0.1365 0.0952 0.1438 0.0971
1 + k 1.2278 1.2033 1.2274 1.2086 - - - -
1 - t 0.8266 0.8278 0.8252 0.8285 - - - -
1 - wT 0.6098 0.6165 0.6087 0.6230 - - - -
R 1.0095 1.0115 1.0076 1.0126 - - - -
Table 2.3 Summary of numerical uncertainties.
USG USI USN based on
CTDM 2.3% - 3.9% 0.0% 2.3% - 3.9% %CTDM (Condition A) CTFS 3.8% - 6.4% 0.2% 3.8% - 6.4% %CTFS (Condition A)
CW 4.4% - 7.4% 0.2% 4.4% - 7.4% %CTFS (Condition A) 1 + k 2.3% - 3.9% 0.0% 2.3% - 3.9% %(1 + k) (Condition A)
1 - t 0.3% - 0.6% 0.1% 0.3% - 0.6% %(1 - t) (Condition A) 1 - wT 3.0% - 5.1% 1.0% 3.2% - 5.2% %(1 - wT) (Condition A)
R 0.4% - 0.7% 0.0% 0.4% - 0.7% %R (Condition A)
* p is assumed to be 2.5 – 3.5. FS = 3 is applied. Error between condition (A) and (D) is adopted for uncertainties estimation.
28
2.3.2 水槽試験による CFD 計算の精度検証
本研究で使用するCFDの精度検証を目的に、水槽試験を実施した。水槽試験は、
33CT、82BC、749GTそれぞれの原船型について、Table 2.1に示した船長 6.2 mから 7.6mの大型模型船を製作し、海技研の三鷹第 2水槽(以下、400m水槽)で実施した。
400m 水槽は、長さ 400m、幅 18m、深さ 8m の Fig. 2.3 に示す船型性能試験用の大 型長水槽である。
水槽試験解析法は、海技研の標準試験法 [73]に準ずる。伴流計測は、1 本の球 状5孔ピトー管を船幅、喫水方向の2次元にトラバーサ装置でトラバースさせることで、
船尾プロペラ面の伴流分布を計測した [74] [75]。なお、CFD 計算では舵を省略して いるが、模型船の伴流計測をのぞき、抵抗・自航試験では舵を装着した試験を実施し ている。Fig. 2.4 に33CT、82BC、749GTそれぞれの原船型の水槽試験の様子を示す。
Table 2.4 と Table 2.5 に 33CT と82BC それぞれの水槽試験結果を、Table 2.6 に
749GT 船型の水槽試験結果を示す。水槽試験結果と計算結果の差は、造波計算は
749GT 船型の全抵抗係数(𝐶𝑇𝐹𝑆)で 5.0%程度、形状影響係数(1 + 𝑘)は 82BC にお
いて最大 6.3%である。本研究では、計算負荷の高い大規模船型データベースを構築
するため計算格子密度(格子数)に制限をかけており、近年の船舶 CFD に国際ワーク
ショップ [76] [77]の結果を参照すると、本研究の CFD計算は妥当な計算精度を有し
ていることがわかる。また、自航要素については、同ワークショップ [76] [77]での報告 でも指摘されているように、推力減少係数(1 − 𝑡)と比較して有効伴流係数(1 − 𝑤𝑇)に おいて水槽試験結果と CFD 計算値の差が大きい。特に 82BC は肥大度が高いため 船尾伴流の不安定性の影響で試験結果と計算結果の差が大きい。これは国際ワーク ショップの対象船型 JBC(Japan Bulk Carrier [77])と同等の結果である。このため、JBC の結果と本計算の計算格子数等の計算条件を勘案すれば、本計算は妥当な計算精 度を有していると判断できる。
29
Fig. 2.3 Overview of 400m towing tank in NMRI.
30
MS No.852 (33CT)
MS No.842 (82BC)
MS No. 869 (749GT original hull form)
Fig. 2.4 Photographs of towing tests for 3 hull forms.
40 Continue
Fr = 0.200 ,Vs = 10.90 [knot]
Fr = 0.210 ,Vs = 11.44 [knot]
Fr = 0.220 ,Vs = 11.99 [knot]
31
Table 2.4 Tank test measurements and computational results for 33CT.
EFD CFD Error
1 + 𝑘 1.246 1.208 -3.0%
1 − 𝑡 0.835 0.831 -0.5%
1 − 𝑤𝑇 0.659 0.646 -2.0%
Table 2.5 Tank test measurements and computational results for 82BC.
EFD CFD Error
1 + 𝑘 1.310 1.227 -6.3%
1 − 𝑡 0.842 0.837 -0.6%
1 − 𝑤𝑇 0.542 0.582 7.4%
Table 2.6 Tank test measurements and computational results and correlation factor for 749GT original hull form.
Correlation factor
EFD CFD EFD / CFD EFD - CFD Error
𝐶𝑇𝐹𝑆× 103 3.883 3.689 - - 5.0%
𝐶𝑊× 103 0.325 0.136 2.38 - -
1 + 𝑘 1.231 1.228 - -0.003 0.2%
1 − 𝑡 0.825 0.827 - -0.002 0.2%
1 − 𝑤𝑇 0.596 0.610 - -0.014 2.3%
𝜂𝑅 1.007 1.009 - -0.002 0.2%
* Re adjustment is adopted to CFD CTFS with Schoenherr’s formula from 1.00×107 to 1.11×107.
![Fig. 1.2 Comparison of axial wake distribution between target and inferred [55].](https://thumb-ap.123doks.com/thumbv2/123deta/9843785.1896289/17.892.237.671.483.780/fig-comparison-axial-wake-distribution-target-inferred.webp)
![Fig. 2.1 Comparison of propeller efficiency between MAU series propeller and ideal efficiency [70]](https://thumb-ap.123doks.com/thumbv2/123deta/9843785.1896289/29.892.260.654.138.428/fig-comparison-propeller-efficiency-series-propeller-ideal-efficiency.webp)