令和元年度 修士学位論文
加振レーダ法による鉄筋振動変位と
コンクリートの弾性係数依存性に関する研究
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
情報通信システム分野第一研究室
指導教員 三輪 空司 准教授
学籍番号
T181D075 山田 玲央
加振レーダ法による鉄筋振動変位と
コンクリートの弾性係数依存性に関する研究
目次
第 1 章 序論 ... 3 1-1 研究背景 ... 3 1-2 研究目的 ... 4 第 2 章 原理 ... 5 2-1 加振レーダ法の原理 ... 5 第 3 章 計測システム及び装置概要 ... 8 3-1 計測システム概要 ... 8 3-2 ブロックダイアグラム ... 8 3-3 使用機器 ... 10 3-4 励磁コイル加振システム ... 12 第 4 章 フレッシュコンクリート供試体における計測 ... 15 4-1 計測システム概要 ... 15 4-2 伝播特性の評価 ... 16 4-3 フレッシュコンクリート供試体における加振レーダ計測結果 ... 17 4-4 弾性係数推定の仮説 ... 19 4-5 振動変位と弾性係数の関係 ... 21 第 5 章 有限要素法を用いた解析による考察 ... 23 5-1 解析概要 ... 23 5-2 解析結果 ... 25 第 6 章 加振レーダ法による振動変位計測 ... 38 6-1 イメージングの原理 ... 38 6-2 RC 供試体における振動変位... 40 6-2-1 実験概要 ... 40 6-2-2 RC 供試体における加振レーダ計測結果 ... 42 6-3 RC 供試体における加振レーダ計測とシミュレーションの比較 ... 59 第 7 章 結論 ... 63 7-1 結論 ... 63 7-2 今後の課題 ... 65 参考文献 ... 66 謝辞 ... 66 研究業績 ... 67 研究発表 ... 67第1章 序論
1-1 研究背景
近年、鉄筋コンクリート構造物の早期劣化が社会問題となっている。日本では1923 年の 関東大震災以後、防火や耐震などの有用性が認められ鉄筋コンクリート構造物が増加して いる。鉄筋コンクリートは、鉄筋がもつ破断しない粘り強さ(靭性)と引張強度、コンクリ ートがもつ高い圧縮強度を組み合わせたものである。しかし、大気中の二酸化炭素がコンク リート内部に侵入し炭酸化反応を起こすことによる中性化、塩化物イオンの影響で鋼材が 早期に腐食する塩害、コンクリート中の水分の凍結膨張が発生し長年にわたる凍結と融解 の繰り返しによってコンクリートが劣化する凍害、外力や施工ミスによって発生するひび 割れ等鉄筋コンクリート構造物の劣化要因は様々であり、それらによって連鎖的に劣化が 進行する。やがて鉄筋破断やコンクリートの崩落といった耐力低下、第三者被害の発生に結 び付く。また、この劣化過程において、コンクリートの見かけの弾性係数が低下する場合が 多いことも知られている。したがって、このコンクリートの見かけの弾性係数低下を評価で きればコンクリートの劣化を評価することが可能となると考えられる。弾性係数はコンク リートからコアを採取する直接法により弾性係数の評価が可能である。また、非破壊的には 弾性波伝搬速度によりコンクリートの弾性係数を評価する手法があるものの、非接触での 手法はこれまで提案されていない。 一方、これまで我々は弾性波とは独立な手法として、コンクリート表面に設置した励磁コ イルにより鉄筋を正弦振動し、ドップラレーダの原理により鉄筋振動変位を定量的に検出 する加振レーダ法を提案し、鉄筋腐食評価へ適用してきた。しかし、本手法は、鉄筋振動変 位の空間的もしくは時間的な相対変化から腐食を評価する手法にとどまっており、振動変 位の大きさだけから腐食の評価が困難、すなわち振動変位の絶対値の物理的意味が不明な 点が問題となっている。加振レーダ法における鉄筋の振動変位は加振力に依存するため、印 加電流や鉄筋かぶり、鉄筋径等により変化することがわかっている。一方、加振レーダ法で は鉄筋でコンクリートを圧縮し、そのひずみを振動変位として計測していると考えれば、鉄 筋の振動変位はコンクリートの硬さや弾性係数によっても変わることが予想される。した がって、振動変位とコンクリートの弾性係数、かぶり、鉄筋径等との関連が明らかとなれば、 振動変位からかぶりや鉄筋径に依存しないパラメータとして弾性係数の非破壊、非接触で の評価が可能になることが期待され、既知のパラメータから健全供試体の振動変位の基準 値を求めることができ、その基準値を用いて比較することで劣化を評価できる可能性があ る。 そこで本研究では、鉄筋振動変位がコンクリートの弾性変形により発生していると仮定 し、鉄筋振動変位から弾性係数依存性を評価する。そして、既存の加振レーダ法を利用して振動変位と弾性係数が時間経過で大きく変化するフレッシュコンクリートでの鉄筋振動変 位を計測し、鉄筋振動変位とコンクリートの弾性係数の関係性を把握する。また、FEM(有 限要素法)解析を用いて加振レーダ法を模擬した解析を行うことで健全状態での振動変位を 算出し弾性係数との関係を把握する。そしてRC 供試体において加振レーダ計測を行い実計 測でとFEM 解析での結果との比較を行い、振動変位の鉄筋径、かぶり、弾性係数の依存性 を把握する。
1-2 研究目的
本論文では、先行研究である加振レーダ法により算出される鉄筋振動変位がコンクリー トの弾性係数とどのような関係にあるかを検討することを目的とする。まず、既存の加振レ ーダ法を利用して振動変位と弾性係数が時間経過で大きく変化するフレッシュコンクリー トでの鉄筋振動変位を計測し、鉄筋振動変位とコンクリートの弾性係数の関係性を確認す る。その後FEM 解析を用いた弾性応力解析により加振レーダ法を模擬した解析を行うこと で弾性係数が変化したときの振動変位との相対的な変化を検討する。その後RC 供試体にお ける加振レーダ計測を行い、FEM 解析の結果と比較を行い鉄筋振動変位と弾性係数の関係 について検討した結果を述べる第 2 章 原理
2-1 加振レーダ法の原理
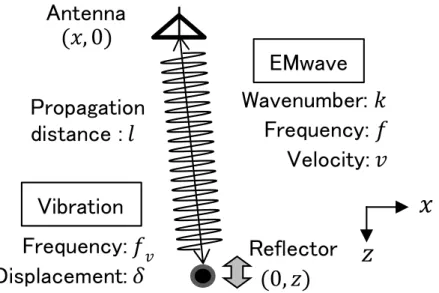
Fig. 2-1 に加振 RC レーダにおけるドップラ変位計測の概念図を示す。簡単のため,単一 周波数 𝑓 の電波のドップラ信号について考える。今,原点 にある送信アンテナから,計測 対象に向け電波を照射し,点(𝑥, 0) にある反射体から反射された反射波を同一のアンテナで 受信するものとする。同時に計測対象を単一周波数 𝑓𝑣 で振動させる。ここで,振動周波数 は電波の周波数に比べ十分低いため,対象は電波に対し一様に振動するものとみなせる。こ のとき,反射体のパス方向変位 𝑢(𝑡) は一般に式(2-1)のように表される。 𝑢(𝑡) = 𝛿 cos(2𝜋𝑓𝑣𝑡) (2-1) ここで,𝛿,𝑓𝑣 はそれぞれ振動振幅,振動周波数である。さらに,センサから反射点までの 距離 𝐿 は 𝑥/𝑧 ≪ 1とすると式(2-2)で近似できる。 𝐿(𝑡) ≅ 𝑧 +𝑥2𝑧2 − 𝑢(𝑡) = 𝑙 − 𝑢(𝑡) (2-2) この反射体からの受信アンテナの位置における複素受信信号 𝑒̇(𝑓, 𝑡) は振動により反射波 の伝搬経路が時間的に微小変動するため,ドップラ効果により反射体の複素反射係数 𝑅 ̇ と 電波の波数を 𝑘 として式(2-3)のように表される。 𝑒̇(𝑓, 𝑡) = 𝑅̇𝑒𝑗(2𝜋𝑓𝑡−𝑘2𝑙)𝑒𝑗2𝑘𝛿 cos(2𝜋𝑓𝑣𝑡) (2-3) ここで,アンテナ特性,球面拡散項は無視した。また,一般に 𝑟 ≪ 1とすると,以下の近似 が成立する。 𝑒𝑗2𝑟cos𝜃≅ 1 + 𝑗𝑟𝑒𝑗𝜃− 𝑗𝑟𝑒−𝑗𝜃 (2-4) 今,電波の波長(数 cm)に対して,十分小さい振動変位(数 m)を考えると,𝑘𝛿 ≪ 1から, 受信信号𝑒̇(𝑓, 𝑡) は式(2-5)のように近似できる。 𝑒̇(𝑓, 𝑡) ≅ 𝑒̇0(𝑓, 𝑡) + 𝑒̇𝑑(𝑓 + 𝑓𝑣, 𝑡) + 𝑒̇𝑑(𝑓 − 𝑓𝑣, 𝑡) (2-5) 𝑒̇0(𝑓, 𝑡) = 𝑅̇𝑒−𝑗𝑘2𝑙 𝑒𝑗2π𝑓t (2-6)Fig. 2-1 加振レーダ法の概念図 𝑒̇𝑑(𝑓, 𝑡) = 𝑗𝑅̇𝑘𝛿𝑒−𝑗𝑘2𝑙𝑒𝑗2πf𝑡 = 𝑗𝑘𝛿𝑒̇0(𝑓, 𝑡) (2-7) ここで,𝑒̇0(𝑓, 𝑡) は加振を行わないときの受信信号と等価な信号であり,本論文では無変調 成分と呼ぶ。また, 𝑒̇𝑑(𝑓, 𝑡) は計測対象が単一周波数 𝑓𝑣 によって振動していれば発生する 信号であり,ドップラ成分と呼ぶ。 このとき,受信信号から直交検波により周波数 𝑓 及び,𝑓 ± 𝑓𝑣の成分のみを取り出して 得られる無変調成分及びドップラ成分の伝達関数 𝐻̇0(𝑓) ,𝐻̇𝑑(𝑓)はそれぞれ式(2-8),(2-9) のように表される3)。 𝐻̇0(𝑓) = 𝑅̇𝑒−𝑗2π𝑓2𝑙/𝑣 (2-8) 𝐻̇𝑑(𝑓 ± 𝑓𝑣) = 𝑗𝑘𝛿𝐻̇0(𝑓 ± 𝑓𝑣) ≅ 𝑗2π𝑓𝐻̇0(𝑓) 𝛿/𝑣 (2-9) ここで,波数 𝑘 = 2π𝑓/𝑣を用い,振動周波数 𝑓𝑣 はレーダ波の周波数 𝑓 に比べ十分低いた め,𝑓 ± 𝑓𝑣 ≅ 𝑓とした。一般に,上式は空間分解能を有していないが,電磁波の周波数 𝑓 を 中心周波数 𝑓𝑐 ,帯域幅 𝑓𝑤 で掃引しながら,それぞれの伝達関数 𝐻̇0(𝑓) , 𝐻̇𝑑(𝑓) を計測 し,逆フーリエ変換すればアンテナ位置 (𝑥, 0) で得られた複素インパルス応答(レーダ波 形) 𝑔̇0(𝑥, 𝑡) ,𝑔̇𝑑(𝑥, 𝑡) がそれぞれ式(2-10~11)で与えられる。 𝑔̇0(𝑥, 𝑡) = 1 𝑓𝑤 ∫ 𝐻̇0(𝑓)𝑒𝑗2π𝑓𝑡𝑑𝑓 𝑓𝑐+𝑓2𝑤 𝑓𝑐−𝑓𝑤 2 = 𝑅̇sinc {𝜋𝑓𝑤(𝑡 − 2𝑙 𝑣)} 𝑒 −𝑗2π𝑓𝑐(𝑡−2𝑙 𝑣) (2-10)
Displacement:
EMwave
Vibration
Frequency:
Frequency:
Reflector
Wavenumber:
Velocity:
Antenna
Propagation
distance :
𝑔̇𝑑(𝑥, 𝑡) = 𝛿 𝑣 d d𝑡𝑔̇0(𝑥, 𝑡) (2-11) ここで,無変調成分 𝑔̇0(𝑥, 𝑡) の絶対値は反射体までの往復時間 𝑡 = 2𝑙/𝑣 においてピークを 有する波形であり,通常のレーダ反射応答と等価な時間波形である。一方,正のドップラ波 形𝑔̇𝑑(𝑥, 𝑡)は無変調成分の微分波形及び振動変位 𝛿 に比例している。したがって,アンテナ から距離 𝑙 にある反射体の伝搬パス方向の振動変位 𝛿(𝑙) は無変調成分の微分波形とドッ プラ成分波形における反射波到達時刻の振幅比として式(2-12)で与えられる3)。 𝛿(𝑥, 𝑙) = 𝑣 |𝑔̇𝑑(𝑥, 2𝑙/𝑣)/ d d𝑡𝑔̇0(𝑥, 2𝑙/𝑣)| (2-12) ここで,式(2-12)は波形ベースの推定により得られる振動変位であり,孤立した 1 個の反射 体について適用可能なことに注意が必要である。
第 3 章 計測システム及び装置概要
本章では,加振レーダ計測のための計測システムについて述べる。3-1 計測システム概要
単一周波数のセンシング波の受信波形 𝑒̇(𝑓,𝑡) からレーダ応答(すなわちインパルス応 答)を得るには、周波数 𝑓 を広帯域に掃引して、その伝達関数を計測し、逆フーリエ変換 をすればよい。ネットワークアナライザは送信信号と同一周波数の直交する 2 つの参照信 号と受信信号とを掛け合わせ、その低周波成分を取り出す(直行検波)ことで各周波数の複 素伝達関数を計測できる。低周波成分を取り出す際にはローパスフィルタが用いられるが、 その帯域幅をIF(Intermediate Frequency)帯域幅と呼び、IF 帯域幅を狭くすればするほど SN 比の高い計測が可能であるが、帯域幅に逆比例して計測時間がかかるという特徴を有する 一方、本計測では 𝑓𝑣 のドップラ周波数遷移を起こした成分の複素伝達関数を計測するこ とが目的である。そのためには、送信信号が 𝑓 のとき,参照波を𝑓 − 𝑓𝑣 とする必要がある が、ネットワークアナライザ内部の参照周波数と送信周波数は同一であり、基本的にはドッ プラ成分のみの計測は困難である。 そこで、送信信号にネットワークアナライザの外部で加振周波数を加え、𝑓 − 𝑓𝑣 に変調 して送信アンテナから送信後、ドップラ効果によって周波数が 𝑓𝑣 だけ低下した周波数𝑓 の成分を受信することにより、ネットワークアナライザを用いてドップラ計測を可能とし た。また、この際、IF 帯域幅は加振周波数より十分小さくしておく必要がある。3-2 ブロックダイアグラム
加振レーダ計測を行うためのネットワークアナライザを用いた加振レーダシステムのブ ロックダイアグラムを Fig. 3-1 に示す。また、本システムによるセンシング波の変調の流れ について以下に示す。センシング波の変調は以下のような流れとなる 1. ネットワークアナライザの出力端子(OUT)から周波数 𝑓 で信号が送信されるこのと き、送信周波数は単一のものではなく中心周波数からあるスパンで周波数を変更しな がら送信される。 2. 位相分配器で信号の位相を0°と 90°に分配され、変調用発振器によって出力された周 波数𝑓𝑣で位相差が90°の信号がミキサで掛け合わされ、混合器で足しあわされることで ネットワークアナライザの周波数𝑓𝑛より加振周波数𝑓𝑣だけ変調された信号となる. 3. 変調された信号は送信側のアンテナよりセンシング波として出力され、励磁コイルに よって周波数𝑓𝑣で加振された計測対象によって反射し、ドップラ効果を受けて受信側の アンテナで受信される励磁コイルによって磁性体を加振する場合、励磁コイルに印加 される電圧の周波数の 2 倍の周期で振動をするため、実際に加振をするときは加振用 発振器の周波数は𝑓𝑣/2にする必要がある。 4. 受信された信号はネットワークアナライザにて取り込むネットワークアナライザは 受信側で直交検波を行うため、ネットワークアナライザの出力周波数からIF バンドの 幅10Hz でのみ取り込み、ドップラ成分以外の周波数成分を除去することが可能となる。
3-3 使用機器
実験で使用した機器を以下に示す。 Table 3-1 使用機器 1 名称 メーカー名 型番 設定 Network Analyzer ROHDE& SCHWARZ ZVL- Center:5GHz Span:8GHz Power:-8dBm IF Band Width:10Hz Number of points:151 Modulation Oscillator NF WF1973 𝑓𝑣:114Hz Amplitude:1.5𝑉𝑝−𝑝 Wave:Sine Phase:CH1=0°,CH2=88.5° Vibration Oscillator NF WF1948 𝑓𝑣/2:57Hz Amplitude:2.88𝑉𝑝−𝑝 Wave:Sine Power Amplifier NF BP4610 CV-EXT:10 倍Table 3-2 使用機器 2
名称 メーカー名 型番 定格
Power Amplifier1
Mini-Circuits ZRON-8G+ Frequency:2000MHz~8000MHz Gain:20dB Quadrature Hybrid Coupler Marki microwave QH-0R714 Frequency Range:0.7~14.5GHz Insertion Loss:-3dB Mixer Marki microwave M1-0008 LO/RF:0.01~8GHz IF:DC~2GHz
Combiner Mini-Circuits ZFRSC-123+ Frequency Range:DC~10GHz Termination Mini-Circuits ANNE-50+ Impedance:50Ω
Frequency:DC~18GHz Power
Amplifier2
Mini-Circuits ZVA-183+ Frequency:700MHz~18GHz Gain:26dB 計測に用いるアンテナであるボウタイスロットアンテナは、2 枚の銅板とセミリジットケ ーブルを用いて作成した。ボウタイスロットアンテナの寸法の概要図とボウタイスロット アンテナの写真を Fig. 3-2 に示す。また、計測時と同じ設定でキャリブレーションを行い空 中で取得した周波数特性を Fig. 3-4 に示す。 Fig. 3-2 作成したアンテナ、アンテナ寸法(上:上面 下:側面)
Fig. 3-4 アンテナの周波数特
3-4 励磁コイル加振システム
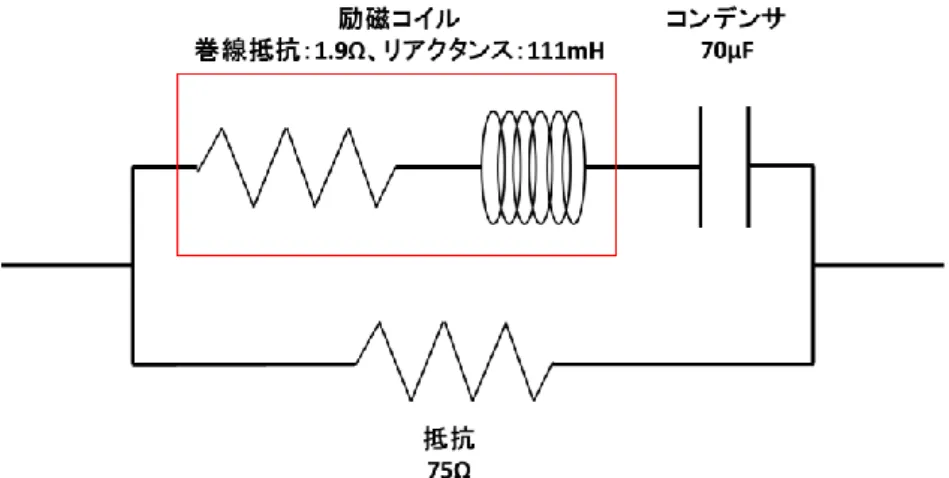
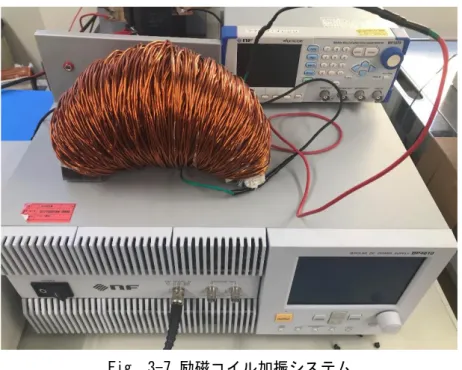
計測対象である鉄筋を加振させるために用いた励磁コイル加振システムの概要について 述べる。励磁コイルは渦電流損低減のため積層鋼板構造となっており、材質 35H360A、厚 さ 0.5 mm の板を 100 枚積層した構造になっている。また、コイルに巻いたエナメル線は、 直径φ:1.2 mm のポリアミドイミド銅線(AIW)を 500 回巻いて作成した。励磁コイルの写真 を Fig. 3-5 に示す。 励磁コイルは抵抗値が 1.9 Ω であるものの、インダクタンスが 111 mH であり、交流電流 を印加するとコイルに大きな電圧が発生する問題がある。一方、加振は単一周波数であるた め、コンデンサをコイルに直列に接続して直列共振回路を構成し、リアクタンス成分を 0 に することで、インピーダンスを低下させることが可能となる。直列共振回路の回路図を Fig. 3-6 に、励磁コイル加振システムの全体の写真を Fig. 3-7 に示す。Fig. 3-6 において直列共振 回路と並列に75 Ω の抵抗を接続したのは、アンプの電源を入れた際、直列共振回路はイン ピーダンスが無限大にみえるため開放状態と等価であり、定電流源として動作するアンプ の電圧制限によりシャットダウンすることや、また、電源オフ時にコイルやコンデンサに溜 まった電磁エネルギを熱として消費させるためである。Fig. 3-5 使用した励磁コイル
第 4 章 フレッシュコンクリート供試体における計測
この章では、弾性係数の変化が大きい状態である打設直後の粘性の高いフレッシュコン クリートにおける加振レーダ計測し算出した振動変位から弾性係数と振動変位の関係の考 察について述べる。4-1 計測システム概要
コンクリートの打設直後は水分が多く、電磁波が減衰しやすいためレーダでの測定が困 難な可能性があり、現状のシステムで加振レーダ測定が可能かどうか検証する必要がある。 そのため、コンクリート打設直後からの硬化過程における電磁波伝搬特性を計測した。30 cm×30 cm×10 cm、30 cm×30 cm×12 cm の厚みの異なる型枠を用いた。測定は 10 cm、12 cm 幅の間で行う。だ説直後コンクリート型枠両面に送受信ボウタイスロットアンテナを設置 した。計測時のブロックダイアグラムは以下のFig. 4-1-1 に示す。 Fig. 4-1-1 ブロックダイアグラム4-2 伝播特性の評価
それぞれの供試体で計測した周波数特性、時間波形をFig. 4-2-1~4 に示す。 Fig. 4-2-1 左:30×30×10 の供試体の周波数特性(赤:打設直後 青:70 時間後) 右:30×30×12 の供試体の周波数特性(赤:打設直後 青:70 時間後) Fig. 4-2-1~2 より、どちらの供試体でも 5 GHz で約 20 dB 減衰していることが確認できる。 これより、打設直後は水分が多いため高周波の部分での減衰が確認できる。しかし、3 GHz 以下での低周波での減衰は 10 dB 以下であり、加振レーダ法により計測可能なレベル であると考えられる。 Fig. 4-2-3 左:30×30×10 の供試体の時間波形 右:30×30×12 の供試体の時間波形 Fig. 4-2-3 より、時間波形では供試体の厚みによる振幅の減衰はあまり見られず、経過時間 と共に振幅は約42%増加している。2 つの供試体のピークの到達の時間の差(0.206 ns)は、2 cm の厚みによる差から発生したものと考えられる。また比誘電率に関してだがどちらの供 試体も約 25 から 17 に減少していることより、コンクリート中の水分が水和反応によって 使用され、減少したものと考えられる。4-3 フレッシュコンクリート供試体における加振レーダ計測結果
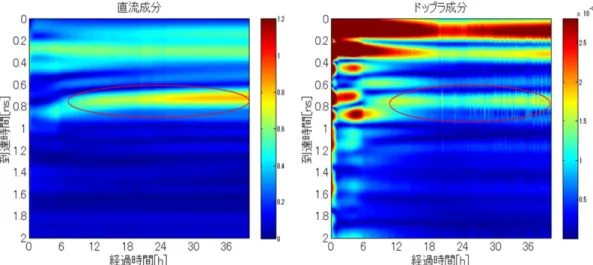
励磁コイルによる加振計測で、(15×15×40 かぶり 4 cm,)の供試体を計測した。冶具を 装着した後の配置図を Fig. 4-3-1 に示し、冶具は励磁コイルの足の間に木版を敷き、その下 部にアンテナを配置する。励磁コイルは両端のジャッキで、アンテナは木版についているネ ジで、双方独立に調整できるような状態にある。 また、15×15×40 かぶり 4 cm の直流成分、ドップラ成分の鉄筋の応答が確認できる位置で の単発波形をFig. 4-3-2 にレーダプロファイルを Fig. 4-3-3 に示す。また、同時に計測した 同じサイズの別の供試体でコンクリートの内部温度と室温をデータロガー測定した。その 結果を Fig. 4-3-3 に示す。 実際に使用した供試体の配合を Table. 4-3-1 に示す。 Table.4-3-1 供試体の配合 V W/C s/a W C S G Ad V S1 S2 3.15 2.68 2.68 2.86 1000.0 0.47 0.39 176.0 375.4 344.8 344.8 1151.2 0.375 4.5 60 0.47 0.39 10.56 22.52 20.69 20.69 69.07 0.023 4.5 Fig. 4-3-1 連続加振レーダ計測の配置図Fig. 4-3-2 連続加振レーダ計測における鉄筋が確認できる位置での単発波形 (左:直流成分 右:ドップラ成分)
Fig. 4-3-2 連続加振レーダ計測結果(左:直流成分 右:ドップラ成分)
内部温度が上昇し、フレッシュコンクリート供試体では打設から6 時間後に直流成分、 ドップラ成分共に鉄筋の位置に応答が見られる。直流成分は6h~36h の間に振幅が約 2 倍 (0.4 から 0.8)に増加していることが確認できる また別日に行ったプロクター貫入抵抗試験でコンクリートの凝結の始発が6 時間後であ ることからこの連続加振レーダ計測での結果と比較しても硬度が増加していくことが確認 できる。 直流成分、ドップラ成分より算出した振動変位をFig. 4-3-4 に示す。 コンクリート中のセメントの水和反応により凝結が始まり打設から鉄筋の位置に応答が 見え始める6 h~24 h の間に振動変位は大幅に減衰していることから硬度が出てきているこ とが確認できる。また、別日に同じ配合で打設し超音波で計測したデータをFig. 4-3-5 に示 す。 Fig. 4-3-5 別日に同じサイズで計測した超音波伝播速度の計測結果 超音波の伝播速度も打設から6 時間後に伝播速度が速くなっていることから、コンクリ ートが水和反応を起こし硬度が増加し始めていることを示している。
4-4 弾性係数推定の仮説
これまで、鉄筋コンクリートを強制的に腐食させながら、加振レーダ法によって振動変位の時間的変化を求め、その増加傾向から、鉄筋腐食の評価が可能であることを示した。一方、 加振レーダ法では、健全な供試体の状態でも数m オーダの振動変位が得られることに着目 した。健全状態で鉄筋振動変位が算出されるということは、励磁コイルからの加振力によっ て、鉄筋よりも相対的に柔らかいかぶりの部分でのコンクリートが弾性体として作用し、縮 んでいることが予想される。コンクリートは応力ひずみ線図からわかるように、降伏点まで の挙動は弾性体として作用する。そこで、加振レーダ法によって求められる鉄筋振動変位が、 コンクリートの弾性係数と関係性を持っていると考え、以下のような仮説をたてることと する。 弾性係数を推定するためのパラメータのイメージ図を Fig. 4-4-1 に示す。 弾性係数は 1 軸圧縮荷重に対して発生した一様な内部応力をその荷重によるひずみで除し た値であり、一般に弾性体の弾性変形領域では、応力とひずみは比例する。加振レーダ法に よって求めた鉄筋振動変位 𝛿 が、コンクリートの弾性変形により発生していると仮定する と、ひずみ相当量 𝜀 は鉄筋かぶりを 𝐿 とすると式(2-13)のように表される。 𝜀 ≅𝛿 𝐿 (4 − 1) また、鉄筋の加振により発生する圧縮力によるコンクリート内部の応力分布が一様である とすると、加振によるコンクリート内の鉄筋―コイル方向の疑似的な応力 𝜎𝑝 は式(4-2)の ように仮定できる。 Fig. 4-4-1 弾性係数推定モデルの各パラメータ
𝜎𝑝≅ 𝐾 𝐹 𝐴 (4 − 2) ここで、𝐹 はコイルによる鉄筋への加振力であり、𝐴 は加振力が鉄筋に作用する領域の等 価断面積、𝐾 は円柱形である鉄筋によりコンクリートを圧縮する際の 3 次元的な応力分布 を一様な応力分布に対応させる係数である。以上の式より加振レーダ法より得られる疑似 的な弾性係数𝐸𝑝 を式(4-3)のように定義することができる。 𝐸𝑝≅ 𝜎𝑝 𝜀 = 𝐾 𝐹 𝐴 𝐿 𝛿≅ 𝐶 𝛿 (4 − 3) 𝐶 は定数であり、鉄筋径、かぶり、供試体サイズ等によって決まる。上記の仮説に基づけば、 弾性係数と加振レーダによる振動変位が逆比例の関係にあることが予想される。
4-5 振動変位と弾性係数の関係
4-3 節の(4-3)式を用いてフレッシュコンクリートの振動変位が弾性係数と反比例してい るものとし4-3 節の(4-3)式を用いてから算出した弾性係数と 𝐸𝐷 ≅ 𝜌𝑣𝑢2 ( 𝜌:密度) (4-4) の導出式を用いて超音波伝播速度から算出した弾性係数の比較を Fig. 4-5-1 に示す。 Fig. 4-5-1 振動変位から算出した弾性係数と超音波伝播速度から算出した弾性係数との 比較)(フィッティングのためC = 0.09275) 先述した振動変位の大幅に減衰している時間に弾性係数は大幅に増加していることが確 認できコンクリートの硬度が出ているものと確認できる。超音波法と比較しても硬度が確 認されている時刻でのグラフの概形が一致するのでこれは振動変位と弾性係数が反比例の 関係にあり、振動変位の弾性係数に対する依存性があり打設直後のフレッシュコンクリー トにおいて凝結始発の時刻より弾性係数の増加に伴って振動変位が減少する可能性を示唆 している。
第 5 章 有限要素法を用いた解析による考察
この章では、フレッシュコンクリートにおいては振動変位と弾性係数が反比例の関係に あることを受けて、健全状態の供試体においてどのような関係にあるか調査するため RC 供 試体に対する加振レーダ法の有限要素法モデルを作成し、シミュレーションにより鉄筋振 動変位を解析した結果と考察について述べる。FEM 解析を用いて弾性係数を変化させた時 に振動変位がどのように変化するか解析結果をもとに考察する。5-1 解析概要
株式会社フォトンのPhoto-Series 電磁場解析ソフト EDDY で解析した各節点ごとの接点 力を弾性応力解析ソフト ELAS へ受け渡し、節点力を用いて ELAS で弾性振動解析を行う 連成解析を行った。現状では固有振動数の3 分の 1 以下である低周波数(57 Hz)での実験を 行っているため静解析に近似しているが、連成解析を行うことによって、高周波数による動 解析として解析を行うことができる。また、各ステップの節点力を自動で受け渡していくた め、解析時間の短縮にもつながるというメリットがある。そのため、EDDY と ELAS には同 一の時刻テーブルを設定する必要がある。連成解析実行までの流れをFig. 5-1-1 に示す。解 析動作中の流れをFig. 5-1-2 に示す。 Fig. 5-1-1 連成解析実行までのフロー EDDY 解析設定 ・解析モデル(EDDY)読み込み ・条件設定 ・出力項目設定 ・ファイル保存 ELAS 解析設定 ・解析モデル(ELAS)読み込み ・条件設定 ・ファイル保存 連成解析実行 ・EDDY保存ファイル読み込み ・ELAS保存ファイル読み込み ・連成解析実行Fig. 5-1-2 解析フロー 解析に使用したモデルをFig. 5-1-3 に示す。モデル中の RC 供試体の寸法は W100×H100×D300 mm の 1/2 モデルになっている。ELAS における変位拘束は励磁コイル全体とコンクリート 底面としている。 Fig.5-1-3 連成解析モデル Table 5-1 EDDY パラメータ コイルへの印加電流 10900[AT] 周波数 56 [Hz] (1 周期 33 分割) 鉄筋の電気伝導率 6.48× 106 [S/m]
Table 5-1 ELAS パラメータ 鉄筋 w/c63 w/c47 w/c30 弾性係数 [MPa] 206 31.20 35.23 45.19 ポアソン比 0.3 0.2 0.2 0.2 体積弾性率 [MPa] 172 17.3 19.5 25.1 ELAS 上では実際の弾性係数をパラメータで入力すると、コンクリート部分の弾性係数が鉄 筋の弾性係数に対して大きいため、鉄筋の拘束力が強い事と、鉄筋周囲の界面状況が実際の 供試体とは異なる可能性があるため鉄筋の変位がうまく確認できないためここでは 1/1000 倍にすることで鉄筋の変化を見やすくしている。
5-2 解析結果
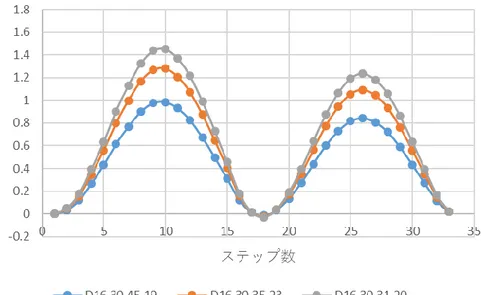
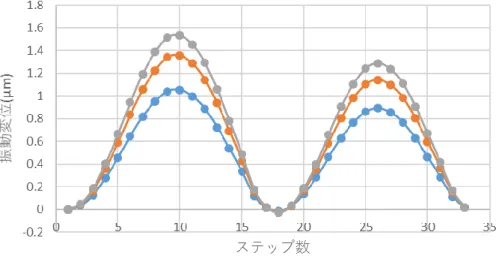
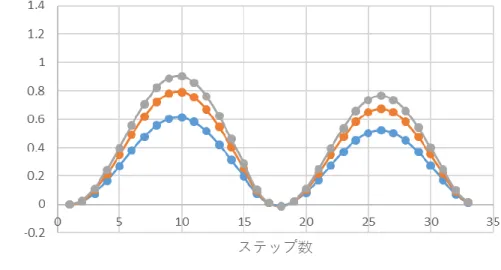
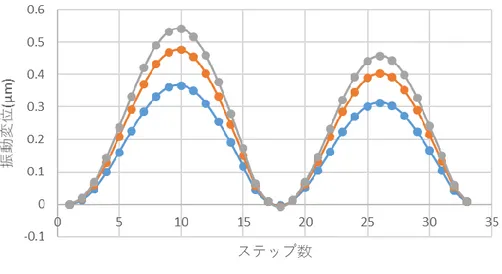
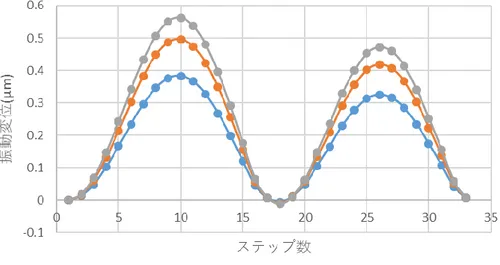
FEM 解析後の鉄筋の y 方向の変位の状態を Fig. 5-2-1 に示す。本節で示している振動変位 は鉄筋中央下部表面の y 方向の変位の最大値と最小値の差を振動変位として示している。 各モデルにおける振動変位を Table 5-2-1~9 に示し、各ステップにおける変位量を Fig.5-2-2~10 に示し、かぶりによる振動変位の違いを Fig.5-2-11~13 に、鉄筋径による振動変位の違 いをFig. 5-2-14~16 に弾性係数による振動変位の違いを Fig.5-2-17~19 示す。また、かぶりと 鉄筋径が同じ供試体の場合、コンクリート内の応力は同じになると考えられるため、反比例 が成立するとすれば、定数 𝐶 は一定値を取ると考えられる。したがって、振動変位 𝛿 と 弾性係数 𝐸 の真値との積 𝛿𝐸 はかぶりと鉄筋径が同じ供試体の場合、弾性係数によらず同 様になる。そこで、弾性係数45.19 MPa を基準にした際の 𝛿𝐸 の差も示した。 Fig. 5-2-1 FEM 解析後の鉄筋の y 方向の変位の状態Fig. 5-2-2 かぶり 3cm D13 鉄筋 各ステップにおける変位量
Fig. 5-2-4 かぶり 3cm D19 鉄筋 各ステップにおける変位量
Fig. 5-2-6 かぶり 4cm D16 鉄筋 各ステップにおける変位量
Fig. 5-2-8 かぶり 5cm D13 鉄筋 各ステップにおける変位量
Fig. 5-2-10 かぶり 5cm D19 鉄筋 各ステップにおける変位量
Fig. 5-2-12 w/c47 鉄筋径による違い
Fig. 5-2-14 w/c63 かぶりによる違い
Fig. 5-2-16 w/c30 かぶりによる違い
Fig. 5-2-18 D16 鉄筋 弾性係数による違い
Table 5-2-1 かぶり 3cm D13 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 1.31 3.0 35.23 1.15 2.0 45.19 0.87 0.0 Table 5-2-2 かぶり 3cm D16 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 1.48 1.0 35.23 1.30 0.0 45.19 1.00 0.0 Table 5-2-3 かぶり 3cm D19 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 1.56 0.4 35.23 1.38 0.8 45.19 1.07 0.0 Table 5-2-4 かぶり 4cm D13 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 0.82 1.0 35.23 0.72 0.4 45.19 0.55 0.0 Table 5-2-5 かぶり 4cm D16 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 0.92 1.0 35.23 0.81 0.0 45.19 0.62 0.0
Table 5-2-6 かぶり 4cm D19 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 1.22 0.8 35.23 1.08 0.5 45.19 0.84 0.0 Table 5-2-7 かぶり 5cm D13 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 0.50 3.0 35.23 0.43 2.0 45.19 0.33 0.0 Table 5-2-8 かぶり 5cm D16 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 0.55 1.0 35.23 0.48 0.0 45.19 0.37 0.0 Table 5-2-9 かぶり 5cm D19 鉄筋変位量の結果 弾性係数𝐸 [MPa] 変位量𝛿 [μm] 𝛿𝐸の差 [%] (基準は弾性係数 45.19) 31.20 0.57 1.0 35.23 0.51 0.1 45.19 0.39 0.0 第4 章(4-3)より、𝛿𝐸が一定であれば振動変位と弾性係数が反比例であることが成立 つ。Table 5-2-1~9 より以上のモデルで𝛿𝐸の差が 3%以下なので Table 5-2-1~9 の結果は反比 例している。また、同じ鉄筋径、かぶりのモデルにおいて弾性係数が大きくなるほど振動 変位が減少していることが確認できる。これは弾性係数の違いによりコンクリートによる 鉄筋の変位拘束が変化していることが示唆され、健全供試体においても4 章で述べたフレ ッシュコンクリートと同様の弾性係数依存性があることが示唆される。 Fig. 5-2-11~13 より同じかぶりであれば鉄筋径が細くなるほど振動変位が減少しているこ とが確認できる。これは鉄筋に作用する力がおよぼす表面積が大きくなるためである。
Fig. 5-2-14~16 より同じ鉄筋径であればかぶりが深くなるほど振動変位が減少しているこ とが確認できる。これは鉄筋に作用する力がかぶりが深くなるごとに減少しているためで ある。 Fig. 5-2-17~19 より弾性係数が増加ると振動変位が減少していることが確認できる。これ は弾性係数が増加することで鉄筋の拘束力が増加するためである。以上のことより、行っ たFEM 解析の結果が妥当であることが言える。
第 6 章 加振レーダ法による振動変位計測
6-1 イメージングの原理
本論文で対象とするような鉄筋を計測対象とする場合,不要反射波の干渉により所望波 (鉄筋)のピーク振幅を正しく抽出できず,(2-5)式の振動変位は不正確となってしまう.一 般に RC レーダでは孤立した物体の直上を移動しながら取得した波形を取得位置順に並べ た場合,その反射波の到達時刻はFig. 6-1-1 のように放物線状のプロファイルを示し,スキ ャン方向の空間分解能は悪い.そこで,本報告では時間シフトしたレーダ波形を重ね合わせ るキルヒホッフマイグレーション法4)と呼ぶ合成開口処理を用いる.送受一体型レーダ波形 の時間軸は,𝑣/2を乗じてアンテナから反射体までの距離 𝑙 の関数とみなせる.このとき, ある距離 𝑙 に現れる波は,アンテナを中心とする半径 𝑙 の球面上の任意の点から到来した ことを示す.その波源位置を推定するため,仮想波源(𝑥,𝑧)を仮定すると,𝑛番目のアンテ ナ位置(𝑥𝑛,0)から仮想波源までの距離 𝑅 は式(6-1)で表される. 𝑅(𝑥𝑛,𝑥,𝑧) = √(𝑥𝑛− 𝑥)2+ 𝑧2 (6-1) 光速を𝑐 ,比誘電率を 𝜀𝑟 とすれば,媒質の伝搬速度は 𝑣 = 𝑐/√𝜀𝑟 であり,アンテナ位置 (𝑥𝑛,0) で得られた受信波形を 𝑔(𝑥𝑛,𝑡) と表記すると,ある仮想波源(𝑥,𝑧)から各アン テナ位置に到来した波の振幅は 𝑔(𝑥𝑛,2𝑅/𝑣) に表れる.したがって,Fig. 6-1-2 のように アンテナ位置を中心に距離𝑅の同心円状に波形振幅 𝑔(𝑥𝑛,2𝑅/𝑣) を分布させ,すべてのア ンテナ位置についてこの操作を足し合わせれば,真の反射点では同一位相の波が足し合わ され評価関数値は成長する.一方,それ以外の場所では,位相がランダムに足し合わされる ことから評価関数値は低いままとなる.無変調成分とドップラ成分に対応したイメージン グ画像𝑢̇0(𝑥,𝑧),𝑢̇+(𝑥,𝑧)は式 6-2,6-3 で表される. 𝑢̇0(𝑥,𝑧) = ∑ d d𝑡𝑔0̇ (𝑥𝑛,2𝑅(𝑥𝑛,𝑥,𝑧) 𝑣⁄ ) 𝑁 𝑛=1 (6-2) 𝑢̇+(𝑥,𝑧) = ∑𝑁𝑛=1𝑔+̇ (𝑥𝑛,2𝑅(𝑥𝑛,𝑥,𝑧) 𝑣⁄ ) (6-3) 本処理は反射波の振幅情報も保存されていることから,真の反射体位置(𝑥𝑟,𝑧𝑟)での鉄筋の 反射振幅を用いて,式(6-4)により鉄筋の振動変位が得られる.これが,イメージングベース の鉄筋振動変位推定アルゴリズムである. 𝛿(𝑥𝑟,𝑧𝑟) = 𝑣|𝑢̇+(𝑥𝑟,𝑧𝑟)/𝑢̇0(𝑥𝑟,𝑧𝑟)| (6-4)粗骨材の入った RC 供試体と弾性係数と振動変位の関係性を鉄筋かぶりや鉄筋径もパラメ ータとし確認する。また、実際に実験によって求めたパラメータを用いて弾性係数の推定を 試みる。 Fig. 6-1-1 レーダプロファイルの取得 Fig. 6-1-2 マイグレーション処理の概念
#1
#2
#3
アン テ ナ 位
置を中心に
同心円状に
受信振幅を
空間に分配
反射点位置の
振幅が成長
全ての受信波
形について同
様な処理を行
い積算
深さ
水平位置
6-2 RC 供試体における振動変位
6-2-1
実験概要実験に使用したRC 供試体は、群馬大学環境創生理工学科小澤研究室作である。W400× H100×D300 mm の角柱であり、D13 D16 D19 異形鉄筋、かぶりは 30 mm、40mm、50mm で w/c を 30、47、63 の 3 種類である(w/c は水に対するセメントの比率である)。寸法と供試体 の概要をFig. 6-2-1 に、計測イメージ図と概要図を Fig. 6-2-2 に配合表を Table 6-2-1~3 に示 す。
また前述の配合の円柱供試体を用いて載荷試験を行い圧縮強度と弾性係数を求めた。その 結果をTable 6-2-4 に示す。
Fig. 6-2-1 左:供試体の寸法 右:供試体の概要
Table 6-2-1 w/c30 の配合表 W/C 単位量(kg/m3) W C S G 混和剤 Ad* Air S1 S2 1.00 3.15 2.64 2.73 2.86 1000 0.30 150 500 731.00 1169 7 0.9 359 372 30 4.5 15 21.93 35.07 0.21 10.77 11.16 Table 6-2-2 w/c47 の配合表 W/C 単位量(kg/m3) W C S G 混和剤 Ad* Air S1 S2 1.00 3.15 2.64 2.73 2.86 1000 0.47 184 392.42 675.64 1127.75 3.92 4.5 337.82 337.82 30 5.52 11.77 20.48 33.83 0.11773 10.13 10.34 Table 6-2-3 w/c63 の配合表 W/C 単位量(kg/m3) W C S G 混和剤 Ad* Air S1 S2 1.00 3.15 2.64 2.73 2.86 1000 0.63 180 284.84 752.22 1155.15 2.85 4.5 376.11 376.11 30 5.4 8.55 22.81 34.65 0.08545 11.28 11.53
Table 6-2-4 載荷試験により算出される圧縮強度と弾性係数
6-2-2
RC 供試体における加振レーダ計測結果
振動変位の精度を上げるためイメージングベースの振動変位算出を行った。鉄筋に対し てアンテナが直交する方向に100 mm 間を 5 mm ずつ 20 点移動させて計測を行いマイグレ ーション処理を施した。各供試体における計測範囲の加振レーダ波形を横方向に並べたレ ーダプロファイルとマイグレーション処理を施した結果を Fig. 6-2-3~29 に示す。比誘電率 はそれぞれ、12、11、10 としている。 Fig. 6-2-3 45.19 GPa D13 かぶり 3cm W/C [%] 圧縮強度 [N/mm2] 弾性係数 [GPa] 63 28.18 31.20 47 41.81 35.23 30 79.59 45.19Fig. 6-2-4 45.19 GPa D16 かぶり 3 cm
Fig. 6-2-6 45.19 GPa D13 かぶり 4 cm
Fig. 6-2-8 45.19GPa D19 かぶり 4cm
Fig. 6-2-10 45.19 GPa D16 かぶり 5 cm
Fig. 6-2-12 35.23 GPa D13 かぶり 3 cm
Fig. 6-2-14 35.23GPa D19 かぶり 3cm
Fig. 6-2-16 35.23GPa D16 かぶり 4cm
Fig. 6-2-18 35.23GPa D13 かぶり 5cm
Fig. 6-2-20 35.23GPa D19 かぶり 5cm
Fig. 6-2-22 31.20GPa D16 かぶり 3cm
Fig. 6-2-24 31.20GPa D13 かぶり 4cm
Fig. 6-2-26 31.20GPa D19 かぶり 4cm
Fig. 6-2-28 31.20GPa D16 かぶり 5cm
マイグレーション処理を行うことで不要反射波と鉄筋反射を明瞭に分離できる結果とな った。マイグレーション後の波形から算出した振動変位をTable 6-2-5~7 に示す。 Table 6-2-5 31.20GPa における振動変位[μm] 31.20GPa D13 D16 D19 3cm 6.48 7.42 6.63 4cm 5.12 5.39 6.04 5cm 2.99 4.46 4.47 Table 6-2-6 35.23GPa における振動変位[μm] 35.23Gpa D13 D16 D19 3cm 3.65 4.41 5.75 4cm 4.45 5.64 5.8 5cm 3.57 4.01 4.41 Table 6-2-7 45.19GPa における振動変位[μm] 45.19GPa D13 D16 D19 3cm 5.37 7.12 7.64 4cm 3.91 5.46 5.47 5cm 3.25 3.3 3.92 Table 6-2-5~7 中計測不良により極端に振動変位が小さいまたは大きい結果の部分には赤く 塗りつぶしてある。これはかぶりが浅いことにより直達波と反射波が干渉したことが原因 であると思われる。 Table 6-2-5~7 を元に鉄筋径、かぶり、弾性係数による違いを Fig. 6-2-30~33 に示す。(グラ フ中FEM 解析で見られたような変化が見られなかった点には赤い三角形で示してある。)
Fig. 5-2-31 45.19GPa 鉄筋径による違い
Fig. 5-2-33 D19 弾性係数による違い 鉄筋径による違いでは、径が太くなるにつれて振動変位が増大する結果となった。これ は径が太くなることで、鉄筋に作用する力が大きくなるため振動変位が増大している。 かぶりによる違いでは、かぶりが深くなるにつれて、振動変位が減少する結果となっ た。これはかぶりが深くなるにつれて鉄筋に作用する力が弱まるため振動変位が減少して いる。 弾性係数の違いでは概ね弾性係数が増加すると振動変位が減少する傾向が見られた。 このことよりFEM 解析で確認できた傾向が見られたため計測としての妥当性が示唆さ れる。 しかし、FEM 解析で算出された振動変位が実計測で得られる振動変位よりも小さいため、 (4-3)式中の係数 K について検討する必要がある。
6-3
RC 供試体における加振レーダ計測とシミュレーションの比較
第5 章で FEM 解析により算出された振動変位と第 6 章 6-2 で算出された振動変位を比 較するとFEM 解析で算出された振動変位が小さい結果となった。これは実験での誤差 と、FEM 解析での鉄筋周囲の変位拘束条件によることが原因であると考えられる。 しかしFEM 解析での結果より振動変位と弾性係数が反比例の関係にあるため、FEM 解 析の振動変位にフィッティングのための適当な係数 𝐾 を乗じた際に 6-2 節で算出された 振動変位とどれくらいの誤差があるか確認することにより実験での振動変位の妥当性を確 認する。 そこで実験とFEM 解析での振動変位の RMS 誤差が最小となる 𝐾 を求めた( 𝐾 = 5.98 でRMS 誤差は1.10)。導出した 𝐾 を FEM 解析で算出した振動変位にかけた表を Table 6-3-1~3 に示す。 Table 6-3-1 31.20GPa における振動変位[μm] 31.20GPa D13 D16 D19 3cm 7.83 8.85 9.33 4cm 4.92 5.51 7.30 5cm 2.99 3.29 3.41 Table 6-3-2 35.23GPa における振動変位[μm] 35.23GPa D13 D16 D19 3cm 6.88 7.77 8.25 4cm 4.30 4.83 6.46 5cm 2.57 2.87 3.05 Table 6-3-3 45.19GPa における振動変位[μm] 45.19GPa D13 D16 D19 3cm 5.17 5.98 6.40 4cm 3.31 3.71 4.99 5cm 1.97 2.21 2.33Table 6-3-1~3 をもとに実験の結果との比較を Fig. 6-3-1~3 に示す。
Fig. 6-3-1 D13 鉄筋 FEM 解析と実験との比較
Fig. 6-3-3 D19 鉄筋 FEM 解析と実験との比較
Fig. 6-3-1~3 より係数Kをかけることによって振動変位が実験から算出した振動変位と近く なっている。このことより算出した係数 𝐾 の妥当性が示唆される。
また、係数 𝐾 をかけた振動変位と実験の振動変位との誤差を Fig. 6-3-4~6 に示す。
Fig. 6-3-5 D16 鉄筋 FEM 解析と実験との RMS 誤差 Fig. 6-3-6 D19 鉄筋 FEM 解析と実験との RMS 誤差 Fig. 6-3-6~9 より弾性係数35.23GPa(w/c 47)では他の2つより平均的に RMS 誤差が大きく なった。これはRC 供試体での測定値が不備があったためである。計測に不備があったも のを除いてRMS 誤差の平均を取ると約 24%となった。24%の RMS 誤差の範囲内であれば FEM 解析の結果から実際の計測での振動変位を推定することができる可能性を示唆してい る。 またこれによりモデル式(4-3)式中のパラメータ(鉄筋径、かぶり、弾性係数)が既知であ れば加振レーダ計測における振動変位が推測可能である可能性が示唆され、振動変位と弾 性係数の依存性があることを示唆される。
第 7 章 結論
7-1 結論
本研究では、弾性係数を把握したRC 供試体とモルタル供試体において加振レーダ法を用 いた鉄筋振動変位計測を行い、弾性係数と鉄筋振動変位の関係性を示した。また、仮説式に より、算出した鉄筋振動変位から弾性係数への依存性を調査した。また、FEM 解析を用い ることでかぶり、鉄筋径、弾性係数の変化による相対的な振動変位の変化を確認した。 第 1 章は序論であり、鉄筋コンクリート構造物における弾性係数の意義についてふれ、加 振レーダ法によって算出される鉄筋振動変位を用いた弾性係数依存性について述べた。 第 2 章では、加振レーダ法の原理について述べ、加振レーダ法により RC 構造物内の鉄筋 のみを振動させることで、その振動変位の計測を行うことができることを確認した。 第 3 章では、実験的に RC 構造物内の鉄筋の振動変位の計測を行うために構築した計測シ ステムや、システム内に用いられている機器について述べた。 第 4 章では、弾性係数と振動変位の関係を調査するにあたり、時間変化による振動変位の 変化を確認するためフレッシュコンクリートでの連続加振レーダ計測を行い評価した。ま た、鉄筋振動変位から弾性係数への依存性を評価するための仮説をたて、式を示した。フレ ッシュコンクリートが水和反応を起こし硬化を始める凝結始発のタイミングで、振動変位 が約 60%減衰することから弾性係数が増加していることが確認された。このことよりフレ ッシュコンクリートの状態では振動変位が弾性係数に反比例することが確認できた。 第 5 章では、弾性係数、かぶり、鉄筋径のパラメータが変化した際の振動変位を FEM 解 析で求めた。FEM 解析により求めた変位量は弾性係数を 1/1000 としたにもかかわらず実験 値の 1/6 程度となってしまったが、これはソフト側の変位拘束条件によるものだと思われ る。しかし、弾性係数が減少すると、鉄筋径が太くなると、かぶりが浅くなると振動変位が 増加することが確認できたので解析結果は妥当であると思われる。 第 6 章では、弾性係数、鉄筋径、かぶりがそれぞれ異なる RC 供試体に対するイメージン グベースの加振レーダ計測を行い各々で振動変位を算出した。計測不備によるデータを除 けば概ね FEM 解析で見られた変化が確認できた。しかし FEM 解析により算出された振動 変位は RC 供試体における加振レーダ計測により算出された振動変位より小さい結果とな っているので、フィッティングのための適当な係数𝐾を算出し、加振レーダ計測との比較を行った。その結果RMS 誤差が約 24%となった。そのため約 24%の誤差の範囲内であるなら ば、鉄筋径、かぶり、弾性係数が既知であれば加振レーダ計測における振動変位が推測可能 である可能性が示唆された。これにより本研究の目的である、振動変位と弾性係数の依存性 を確認でき、一点の加振レーダ計測から健全供試体の基準となる振動変位が算出可能とな り劣化評価を行える可能性を示唆できた。
![Table 5-1 ELAS パラメータ 鉄筋 w/c63 w/c47 w/c30 弾性係数 [MPa] 206 31.20 35.23 45.19 ポアソン比 0.3 0.2 0.2 0.2 体積弾性率 [MPa] 172 17.3 19.5 25.1 ELAS 上では実際の弾性係数をパラメータで入力すると、コンクリート部分の弾性係数が鉄 筋の弾性係数に対して大きいため、鉄筋の拘束力が強い事と、鉄筋周囲の界面状況が実際の 供試体とは異なる可能性があるため鉄筋の変位](https://thumb-ap.123doks.com/thumbv2/123deta/6270529.1094355/25.892.129.769.163.317/パラメータポアソンパラメータコンクリートに対して大きい異なる.webp)