卒 業 論 文
題 目イオンスラスタにおける推力可変範囲拡大に関する
研究
氏 名 飯島 健介 所属教育分野 プラズマ理工学 指 導 教 員 中島 秀紀 教授 山本 直嗣 准教授 森田 太智 助教 九州大学工学部エネルギー科学科 提出年月 平成27年2月目次
第1 章 序論 ... 1 1.1 背景 ... 1 1.2 目的 ... 1 第2 章 推進器 ... 6 2.1 電気推進器 ... 6 2.2 イオンスラスタ ... 6 2.2.1 作動原理 ... 6 2.2.2 ビーム引き出し ... 8 2.2.3 イオンの中和 ... 9 2.3 マイクロ波放電型... 12 2.3.1 マイクロ波放電型中和器 ... 12 2.3.2 マイクロ波放電型イオンスラスタ ... 12 2.3.3 電子サイクロトロン共鳴(ECR) ... 12 2.3.4 磁気ミラー効果 ... 12 第3 章 DECIGO ...13 3.1 重力波 ... 13 3.2 DECIGO の概要... 14 3.3 期待できる科学 ... 14 3.4 DECIGO の制御... 15 3.5 DECIGO の軌道... 12 第4 章 実験体系 ...17 4.1 実験装置 ... 174.1.1 小型真空容器 ... 17 4.1.2 イオン源 ... 18 4.1.3 グリッド ... 20 4.1.4 その他の機器 ... 4.2 実験 ... 30 4.2.1 信号による電圧引き出し実験 ... 30 4.2.2 duty 比可変範囲測定 ... 32 4.2.3 電流引き出し実験 ... 34 第5 章 実験結果と考察 ... 41 5.1 実験結果 ... 34 5.1.1 信号による電圧引き出し実験 ... 34 5.1.2 duty 比可変範囲測定結果 ... 34 5.1.3 電流引き出し実験結果 ... 34 5.2 考察 ... 34 第6 章 結論と展望 ... 41 謝辞 ... 44
1
第
1 章 序論
1.1 背景
近年,地球観測や天文観測といった様々な宇宙開発計画が世界中で実行されている. 日本では,2014 年 12 月 3 日に宇宙航空研究開発機構 JAXA を中心として種子島宇宙セ ンターから打ち上げられた小惑星探査機「はやぶさ2」が耳に新しい.この小惑星探査機 「はやぶさ2」は,小惑星イトカワのサンプルを持ち帰り 2010 年 6 月 13 日に地球へ帰 還した小惑星探査機「はやぶさ」の後継機であり,太陽系の起源を解明する手がかりを得 ることを目的としている(1-1).「はやぶさ2」は太陽系の代表的なタイプである S 型,C 型,D 型の小惑星があるなか,「はやぶさ」が調査した S 型小惑星のイトカワと比較し,より始 原的な天体で,同じ岩石質の小惑星でありながら有機物や含水鉱物をより多く含んでい ると考えられる C 型小惑星を目指している.このように「はやぶさ」や「はやぶさ2」 は実際に天体から採取したサンプルを分析することで生命の起源に迫っている. この他にも重力波を観測することで宇宙誕生の謎を解明する計画がある.質量を持っ た物体が加速度運動をすると,その物体の周囲の時空の歪みが空間を伝播していく.この 波が重力波と呼ばれ,その存在は一般相対性理論の一つの帰結として理論的に予言され ている.重力波は,物体との相互作用が非常に小さく,強い透過力を持つため,高密度天体 の天文現象の内部を直接観測する新しい手段となり得る. 重力波の検出や,それによる天文学の創成を目指した研究は 1960 年代から行われてお り,現在までに世界中で大型重力波検出器が建設され,本格的な観測が始められている.こ れらの検出器は,連星中性子星の合体や超新星爆発によって発生する 100 Hz-1 kHz の 重力波をターゲットとしており,銀河系やその近傍の重力波イベントがあれば検出でき るだけの感度が実現されている.しかし,このようなイベントが起こるのは極めて稀と考 えられ本格的な天文学を行うには十分な観測体制ではない.十分な観測体制にするには 検出器の感度を上げ,観測することができる重力波源までの距離を広げることや,検出器 が観測できる周波数帯を広げるなどの改良が必要とされる(1-2). 現在,アメリカ合衆国や日本では,次期計画として,より高感度で重力波を検出する検出 器を建設する計画を進めており,これらの地上検出器が十分な感度を持つことができる のは地面振動の影響を避けることができる 10 Hz 以上の周波数帯であり,観測対象は連 星中性子星の合体や超新星爆発などのコンパクトで激しい天体現象が主となっている. 一方で,10 Hz より低周波の重力波を観測し,重力波によって宇宙誕生の謎を解明する ことや,多様な天文現象を観測するために,重力波検出器を宇宙空間に打ち上げる宇宙重 力波計画DECIGO が 2020 年前後を目安に進められている.宇宙空間では,地上検出器で 問題となっていた地面振動の影響が無い.さらに,レーザー干渉計の基線長を長くとるこ とができるため,低周波数の重力波に対する感度を高めることができる. DECIGO は 0.1~10 Hz の周波数帯に感度を持ち,地上の検出器や LISA では捉えるこ とが困難な,宇宙論的な距離にある波源からの重力波や,初期宇宙起源の重力波を観測す2 ることができる.DECIGO のレーザー干渉計のミラーはスラスタによって筐体の所定の 位置に制御されなければいけない(1-3).制御するために必要なスラスタの性能については 第3 章で述べる.本研究では DECIGO に用いるイオンスラスタの開発を目指すものとす る.
1.2 研究目的
重力波を通して宇宙誕生直後の世界を直接観測し,宇宙誕生の謎を解き明かすこと,ダ ークエネルギーの性質を解明すること,銀河に存在するブラックホール形成の観測を目 的とした宇宙重力波望遠鏡DECIGO に用いられるスラスタの研究を目的とする. DECIGO に用いるスラスタは高精度の制御を実現するために,高感度のローカルセン サーと低雑音のスラスタが必要となる.具体的には,太陽輻射圧などの外力を抑圧するた めに最大推力 100μN,自身の雑音が問題とならない推力雑音 0.1μN/𝐻𝑧12,広いドラッグフ リー制御を実現するための応答速度 10Hz 以上,長期間の運用にたえることのできる総イ ンパルス104以上でマイクロ波の投入電力が 2W,推進剤流量 0.05 sccm で 3 mA の電流を 引き出すことができるスラスタが求められる. 100μN 級のスラスタとして,イオンスラスタ,フィープスラスタ,コールドガスジェッ トといったスラスタがあるが,フィープスラスタは宇宙を汚すこと,コールドガスジェッ トは性能・燃費が悪いことを考慮し,比推力が高く,長期ミッションに適したイオンスラ スタを用いる. DECIGO では 0.1~100 μN の推力が必要となるため,本研究では 1000 倍の可変範囲を もったイオンスラスタを目標とする. イオンスラスタは放電室内部において,推進剤であるキセノンにマイクロ波を投入して, 推進剤をプラズマ化する.そして,スクリーングリッドとアクセルグリッドの間に与えら れた電位差でプラズマ化したイオンを加速させ,その反作用で推力を得るというしくみ になっている.そこで,スクリーングリッドには一定の電圧を印加し,アクセルグリッドに パルス的な電圧を印加させる.duty 比を制御することでイオンを加速させる時間を変化 させ,推力を変化させる. マイクロ波の投入電力,推進剤 Xe の流量,引き出す電流それぞれの目標値は表 1 のとお りである. 表1 目標値 投入電力 (W) 流量 (sccm) 電流 (mA) 2 0.05 33
参考文献
(1-1) JAXA 小惑星探査機「はやぶさ 2」 www.jaxa.jp/projects/sat/hayabusa2/index_j.hyml (1-2) 安藤正樹,川村静児:宇宙重力波望遠鏡 DECIGO (1-3) 川村静児:スペース重力波アンテナ DECIGO4
第
2 章 推進機
2.1 電気推進機
(2-1) 宇宙機の推進方式として,電気推進機と化学推進機の 2 種類があり,電気推進は化学推 進と比較すると,推力は务るものの比推力が約 10 倍あり,必要な燃料を大幅に減らすこと ができ,長期ミッションには適した推進方式となっている.電気推進機には,アークジェッ ト,ホールスラスタ,イオンスラスタといった種類がある.それぞれの推力密度と比推力を 図2.1 に示す.また,電気推進機は推進剤の加速方式により電熱加速型,電磁加速型,静電加 速型の3 種類の分別することができる. 電熱加速型:推進剤をジュール加熱して生成した高エントロピーガスがノズルを介して 空気力学的に加速され推力を得る 電磁加速型:プラズマ化した推進剤を直行する電磁界によって発生するローレンツ力で 加速して推力を得る 静電加速型:プラズマ化した推進剤中のイオンを推力方向に印加された電界により静電 加速することで推力を得る 図2.1 推進機の推力密度と比推力5 目的とするミッションにより,必要とされる推力密度,比推力が異なるので適切な推進方 式を選択する必要がある.電気推進機の主な特徴として以下の 3 点がある(2-2). 1. エネルギー源と推進剤を個別に調達し,任意の割合で調合 2. 推進剤に化学的に不活性な物質を利用 3. 加熱や加速に電熱的,静電的,電磁的手法を応用
2.2 イオンスラスタ
(2-3)2.2.1 作動原理
イオンスラスタはアーク放電やマイクロはなどで推進剤を加熱・電離させてプラズマ を生成し,2 枚からなる多孔状の電極に約 1000 V の高電圧を印加させてイオンを加速す るという静電加速型の推進装置である.イオンスラスタの物理過程は,①推進剤を電離す るイオン生成部,②生成されたイオンを静電的に加速して推力を得る加速部,③放出され たイオンビームを電気的に中和する中和部の 3 つの領域からなる.また,イオンスラスタ はスラスタのプラズマの生成方式によってその分類を行うことが多く,これまでに研究 されてきているイオンエンジンは大きく次の4 種類に分類できる. 1. 直流放電型:プラズマの生成時に,熱陰極からの電子による電離衝突を用いる. 2. 高周波誘導加速型:RF(Radio Frequency)型とも呼ばれ,高周波を放電室外部 から加えることで電子に電離衝突に必要なエネルギーを与えプラズマを生成する.3. マイクロ波放電型:ECR(Electron Cyclotron Resonance)型とも呼ばれ,マイクロ 波により静磁場中の電子を共鳴的に加速・加熱することで,電子による電離衝突がな される.
4. 接触電離型:推進剤よりも仕事関数の大きい物質に推進剤を接触させることでイオ ン生成を行う.
6 図2.2 イオンスラスタの概略図 2.2.2 ビーム引き出し プラズマは正イオンと電子の密度が等しく,正と負の空間電荷量が釣り合った電位的 に安定な状態にある.プラズマの空間電位に対して負の電位を持つ電極が存在すると,空 間電荷のバランスが崩れ電子は反発されて正イオンの空間電荷だけが存在するシース が形成される.プラズマ中の電子はイオンと比較して移動度が大きく,エネルギー分布を 持っているため,イオンから取り出されるときにはイオンは遷移領域を経てからイオン シース領域において加速される.このときプラズマから取り出されるイオン電流量のこ とをイオン飽和電流と呼び,イオン飽和電流密度𝐽𝑝𝑖はイオンシースが安定に存在する条 件から求めることができ,以下の式(2-1)で表される. 𝐽𝑝𝑖 = 𝑒𝑛𝑝( 𝑘𝑇𝑒 𝑚𝑖) 1 2exp(−1 2) (2-1) この式からイオン飽和電流密度はプラズマ密度と電子温度の平方根に比例することが わかる.しかし,プラズマからイオンを引き出す場合は,イオン自らがもっている正の空間 電荷によって電界が変化し,その電界がイオンビーム電流量を制限する.また,イオンシー ス領域において,電流密度𝐽0と電極間の印加電圧𝑉0を用いて以下の式(2-2)のような関係が ある. 𝐽0 = 4𝜀0 9 ( 2𝑞 𝑚𝑖) 1 2𝑣0 3 2 𝑑2 𝛾 (2-2)
7 この式は,Child-Langmuir の式と呼ばれ,荷電粒子ビームの加速進行方向に対して輸送す る場合の最大電流密度を表す.1 つの孔から引き出すことができる最大のイオンビーム電 流は,理想的には引き出し電圧の 3/2 乗に比例して増加する.しかし,イオンは質量が大き いので速度が遅いので空間電荷効果を受けやすい.また,与えられた電極間隙」に対し絶 縁破壊電圧が存在することなどから,イオンビームの大きさには上限値がある.多量のイ オンビームを得たい場合は孔の数を増やせばよい. イオンスラスタでは,プラズマ生成部で発生した正イオンを静電界によって加速する ことでイオンビームの引き出しが行われる.イオンビームの引き出し部はプラズマに接 しているスクリーン電極と 1 mm 程度の短い間隔で置かれる加速電極,減速電極で構成さ れている.本研究では減速電極は使用しない.各電極には内径 1~3 mm の孔が多数あけら れ,その開孔率はスクリーン電極で約 70 %,加速電極で約 25%となっている.イオンビーム の下流領域には中和器から放出された電子やイオンとスラスタから漏出した中世粒子 との電離反応で生じた電子が存在し,ビームプラズマと呼ばれるイオンビームと,それを 取り囲むようにプラズマが存在した状態が形成されている.これらの電子が引き出し部 を通ってプラズマの生成部へ逆流しないようにアクセル電極が負の電位領域を形成し ている.
2.2.3 イオンの中和
イオンスラスタの外側に設置された中和器でイオンビームの中和が行われる.イオン スラスタが正のイオンを噴出するとイオンスラスタは負に帯電するため,噴出されたイ オンが再び引き戻されるため推力発生が不可能になる.このため,噴出したイオンと同数 の電子を放出する必要があるが,その電流量は中和器やビームプラズマのわずかな電位 の変化によって自動的に行われ,特別な制御を必要としない.8
2.3 マイクロ波放電型
2.3.1 マイクロ波放電型中和器
マイクロ波放電型中和器は中和器内部の一次電子はイオン源同様に ECR 加熱による プラズマから供給される.放電室内ではフロントヨークとバックヨークの間で磁気ミラ ーが形成されており,プラズマ中で生成された電子は,磁力線に沿ってヨークに近づくが ヨークの周りの強い磁場により逆側のヨークへ跳ね返される.電子はこのように磁気ミ ラー間を往復する間に,マイクロ波の電界により加速され,中性粒子に衝突し,プラズマが 生成されていると考えられている.また,磁気ミラー間に ECR 領域が含まれると,そこで電 子が共鳴的に加速されることで,より効率よくプラズマを生成することができる. イオンは引き出された電子の代わりに壁面に入射し,壁に衝突したイオンは再結合し て再びプラズマの材料として利用されるため低流量での作動が可能となる.中和器は専 用の電源によって負にバイアスされており,生成されたプラズマから電子が外部に向か って引き出され,オリフィス付近でさらに電離衝突を起こして電子を増加させる.また,中 和器オリフィスから出るプラズマジェットがイオンビームと接触することで,電子の通 り道を作り,中和器から放出された電子がイオンビームへの到達が容易になっている.仮 に電子のみを放出した場合,空間電荷により中和器付近で電子の移動が阻害され,電子を 加速させるための引き出し電圧が増加して電力も増加するため不利である.中和器電圧 は中和器の性能に直結し,性能が良いと低い中和器電圧でも効率的に電子を生成し,イオ ンビームに供給できるが,内部の务化やマイクロ波電力の低下などで徐々に性能が低下 すると電子を引き出すために,より大きな電力が必要になる. 図 2.3 マイクロ波放電型中和器の概要図9 図 2.4 ECR 放電によるプラズマ生成
2.3.2 マイクロ波放電型イオンスラスタ
マイクロ波帯域の交流電界で電子を加速し,この電子が中性粒子と電離衝突してプラズ マを生成,放電を維持するマイクロ波放電型をイオンスラスタに用いることで 3 つのメ リットがある. 1. スラスタの長寿命化と構造の簡略化 2. 単一マイクロ波源から互いに電位の異なるイオン源・中和器プラズマの同時生成が 可能 3. スラスタの迅速なスタートが可能10 図 2.5 マイクロ波放電型イオンエンジンの概要図
2.3.3 電子サイクロトロン共鳴 (ECR)
(2-4) 荷電子粒子は真空中でローレンツ力を受け,この向心力によって磁力線を軸としたサ イクロトロン運動という回転運動を行う.空間に磁場のみが存在する場合,電子の運動方 程式は式(2-3)で表される. 𝑚𝑒 𝑑𝑣 𝑑𝑡 = 𝑒𝑣 × 𝑩 (2-3) ここで,𝑚𝑒は電子の質量,vは速度ベクトル,e は素電荷,B は磁束密度である.電子はこの式 にしたがって回転運動をし,その軌道の半径は式(2-4)で表される. 𝑟𝐿 =𝑚𝑣⊥ |𝑒|𝐵 (2-4) そして,これはラーマー半径と呼ばれる.𝑣⊥は電子の垂直成分の速度ベクトルである.磁場 が強いほど,速さが小さいほどラーマー半径は小さくなる.プラズマは反磁性を示すので, 電子の場合,その回転方向は磁場方向に対して右回りとなる.イオンの場合,磁場方向に対 して左回りとなる.また,電子の回転の周波数は,サイクロトロン周波数呼ばれ式(2-5)で表 される. 𝜔𝑐𝑒 = 𝑣⊥ 𝑟𝐿 = |𝑒|𝐵 𝑚 (2-5)11 電子は電場と逆向きに加速されるため,磁場中の電子の回転方向と逆向きに,回転速度が 等しい電場をかけると電子は加速され,電場から効率的にエネルギーを受け取ることが できる.これが電子サイクロトロン共鳴と呼ばれる. 磁場がある場合,角周波数𝜔𝑟𝑓のマイクロ波を,サイクロトロン周波数が𝜔𝑐𝑒>𝜔𝑟𝑓となる 磁場からプラズマ中へ入射すると,透過し,右回り偏波が励起される.また,𝜔𝑟𝑓=𝜔𝑐𝑒とな るとき電子サイクロトロン波と呼ばれる.この電子サイクロトロン波が,弱磁場へ伝播 し,𝜔𝑟𝑓=𝜔𝑐𝑒の電子サイクロトロン共鳴ライン付近で減衰して,電磁波のエネルギーが運 動エネルギーに変換されると,電子は磁力線に拘束されながら周辺の中性粒子と加速的 に電離反応が起こり,電子サイクロトロンプラズマが生成される.また,電子サイクロトロ ン共鳴を起こすときに必要な磁束密度の大きさを𝐵𝑟𝑒𝑠とすると𝐵𝑟𝑒𝑠は式(2-6)で表される. 𝐵𝑟𝑒𝑠 = 𝑚𝜔𝑟𝑓 |𝑞| (2-6) 図 2.3 電子サイクロトロン共鳴の原理
12 図 2.4 電子サイクロトロン共鳴の概念図
2.3.4 磁気ミラー効果
電子サイクロトロン共鳴プラズマでは,電子は中性粒子を電離させるために電場によ って十分なエネルギーを得るまで加速されなければならない.そのため,本推進機では電 子が往復運動を行う磁気チューブと呼ばれる磁束管を利用して動きを制限している.こ の往復行程に ECR 層が含まれていると,効率よく加速でき,プラズマの生成率を高める効 果がある. ミラー磁場を述べると,磁場に垂直な方向の荷電粒子は磁力線の周りをまわるような 軌道を運動する.プラズマ中に図のような磁力線が存在し,図の点 O に旋回の中心をもち, 磁場に垂直な成分と磁場に平行な成分の速度 v0 をもつ粒子があるとする.荷電粒子の運 動エネルギーの保存より式(2-7)が成り立つ. 𝑣2 = 𝑣 ⊥2+ 𝑣||2 =𝑣⊥,02+ 𝑣 ||,02 =𝑣02 (2-7) また,運動の条件から式(2-8)(2-9)が成り立つ. 𝑣⊥ = 𝑣 sin 𝜃 (2-8) 𝑣|| = 𝑣 cos 𝜃 (2-9) 磁場が緩やかに変化する場合,磁気モーメントが一定であることを考慮すると,磁場強度 が増加するに従って平行成分の速度が減尐し,ある磁場強度で荷電粒子は磁場の弱い方 向へ反射される.このような磁場による荷電粒子の反射を磁気ミラーと呼ぶ.磁気モーメ13 ントは式(2-10)で表される. μ= 1 2 𝑚𝑣⊥2 𝐵 (2-10) また,磁気モーメントの一定性から式(2-11)(2-12)が成り立つ. 1 2 𝑚𝑣⊥,02 𝐵0 = 1 2 𝑚𝑣⊥2 𝐵 (2-11) 𝑠𝑖𝑛2𝜃 0 𝐵0 = 𝑠𝑖𝑛2𝜃 𝐵 (2-12) また,荷電粒子が反射する点での磁場強度は,𝑣||=0,θ=90°であるため式(2-13)が成り立つ. 𝐵𝑟𝑒𝑓 = 𝐵0 𝑠𝑖𝑛2𝜃 0 (2-13) 図 2.5 磁気ミラー効果による粒子の閉じ込め B O 0 v v0
14
参考文献
(2-1) 前田優士:イオンエンジンにおけるマイクロ波放電式中和器の寿命評価に関する, 研究,平成 25 年度,九州大学卒業論文 (2-2) 平岡義章:小型マイクロ波放電型中和器の性能向上に関する研究,平成 23 年度, 九州大学修士論文 (2-3) イオンエンジンの作動原理 art.aees.kyushu-u.ac.jp/research/principle.html (2-4) 高村秀一:プラズマ理工学入門,森北出版(1997)15
第 3 章 DECIGO
3.1 重力波
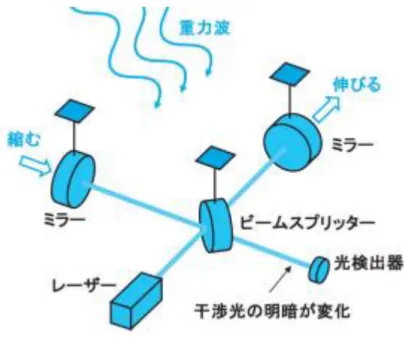
アインシュタインの一般相対性理論によると,質量をもった物質が動くと,時空にゆが みが光速で潮汐的に伝わっていく.また,すべてを貫通し,減衰しないと考えられており, これは電磁波と同様に空間を伝播する横波である.重力波は Einstein 方程式を,弱い重力 場を仮定し,線形近似することで導くことができる(3-1). 図3.1 重力波の伝播 検出には基本的にマイケルソン・レーザー干渉計が用いられ,これはミラー,光検出器, ビームスプリッターで構成されている.ビームスプリッターの一方に置かれた光検出上 では干渉縞が表れており,干渉計に重力波が到達すると,一方の腕の光路長が伸び,もう一 方の腕の光路長が縮むため,干渉縞の明暗が変化する.この明暗を観測することで重力波 を検出することができる.16
図3.2 重力波の検出方法
3.2 DECIGO の概要
DECi-hertz Interferometer Gravitational wave Observatory (DECIGO)は主に,0.1~1 Hz の周波 数帯を観測帯域とする宇宙空間における重力波望遠鏡である.DECIGO の概念図を下に 示す.DECIGO は 3 つの宇宙機 S/C を正三角形状に 1000 km 離して打ち上げ,宇宙機内に 積まれた直径 1m で質量 100km のミラーで干渉計を構成している.この干渉計の基線長 の変動をレーザー光を利用して観測することで,重力波を観測することができる.また,こ の 1000 km の基線長はレーザー光の回折による拡がりとミラーの直径から決められてお り,重力波による空間の歪みの変動を観測する場合は,基線長が長いほど高感度に観測す ることができるが,その一方で基線長を長くすると,レーザー光の回折の影響で干渉計を 構成できなくなることから宇宙機に積まれたミラーで干渉計を実現できる限界の長さ になっている.各 S/C 内でミラーは非接触保持されており,重力波の観測の妨げとなる太 陽輻射圧などの外乱が光路長変動の測定の雑音にならないように設計されている.S/C 内 のミラーの筐体に対する相対位置は筐体に取り付けられたローカルセンサーによって 計測され,S/C の外部にあるスラスタ用いて筐体の位置をコントロールすることによって, ミラーは常に筐体内の所定の位置に制御されている.DECIGO は地球と同じく太陽周回 軌道に複数打ち上げられる予定であり,計画では単独 1 ユニットを 2 つ別々に軌道上に設 置し,さらに 2 ユニットを重ねて配置し,計 3 点で重力波の観測が行われる.レーザー光源 にはショットノイズと輻射圧のバランスから,出力 10W,波長 532nm のレーザーを用いる. この光源は各 S/C に搭載されており,各 S/C 内のミラー間の距離を,2 つの方向から独立に 計測するように設計されている.このように複数の干渉計の信号を用いることで,感度を 上げることや,相関をとることで雑音を取り除くことができ,重力波に対する感度を上げ ることができる(3-2) .
17 図 3.2 DECIGO の概要
3.3 期待できる科学
DECIGO の目標感度が実現すると非常に大きな実りのある科学を得ることができる. 得られる成果としては大きく 2 つに分けて,宇宙の起源や構成に対する知見と,ブラック ホールや中性子星の合体,ガンマ線バーストといった激しい天体現象に対する知見があ る. DECIGO が目的とする周波数帯は,連星によるバックグランドの重力波が無いため,宇 宙論的な距離にある天体からの重力波や初期宇宙の起源の重力波が観測可能になる.中 性子連星合体により発生した重力波は宇宙膨張のために位相変調される.しかし,重力波 は透過性がとても高いので,他では観測が困難な極限状態の初期宇宙を調べることがで きるため,宇宙の起源や構成に対する知見を得ることが期待できる.DECIGO は宇宙論的 な距離に存在する連星からの重力波を高い SN 比で観測する感度を持っているため,1 年 あたり数万個の連星を観測が可能となり,宇宙論や天文学の研究を行う上で革新的な道 具になり得る.例えば,全宇宙のエネルギーの約 3/4 を占めると言われているダークエネ ルギーの性質を決めることができる.遠方の超新星爆発の観測等は,最近の宇宙の膨張速 度と時間と共に加速していることを示唆している.また,この要因は負の圧力を持つダー クエネルギーに起因していると説明されており,連星からの重力波を精密に観測するこ とで赤方偏移を従来と独立な方法で決定することができる.この観測を行うことで宇宙18 膨張を支配するダークエネルギーの性質を解明する手がかりを得られる可能性がある. 一方,天文学的な面では,DECIGO は地上検出器や LISA では観測することのできない周 波数帯の重力波を観測することができ,それらと相補的な情報を得ることが期待できる. また,高感度で天体のイベントを観測することができるため,連星の合体などの激しい天 体現象の統計量を求め,銀河の形成などに対する知見を得ることが期待できる.DECIGO では,連星中性子星の合体イベントを地上検出器の観測周波数帯に入る数年前から観測 することができるため,合体イベントの時期の予測を行うことができる.さらに,DECIGO によって宇宙論的な距離に存在する太陽質量の 1000 倍程度のブラックホール連星の合 体を観測することができるので,銀河の中心に存在するブラックホールや,銀河の形成の メカニズムを解明することが期待できる(3-3)(3-4) . 図 3.3 DECIGO の目標感度
3.4 DECIGO の制御
DECIGO は 1000 km 離れた S/C の間でレーザー干渉計を構成するとても大型な観測機 であるため,干渉計や S/C のドラッグフリー制御には,かなりの制御が求められる. 干渉計基線長の制御においてはミラーに働く重力や電磁力を抑圧し干渉計が動作す ることが重要で,前述のレーザー光の波長よりも良い精度の制御が求められる.DECIGO が目標とする 0.1 Hz 付近の変動成分としては,3×10−18m/𝐻𝑧12以下と見積もられている. また,この精度は地上の重力波検出器では実現されているため,実現可能な値とされてい る.また,ミラーと S/C 間のドラッグフリー制御においては,ミラーを基準とし S/C に働く 太陽光輻射や天体重力などを抑圧し,S/C 変動がミラーの変動を引き起こさないこと,変 動がローカルセンサーの線形領域に収まっていることなどが要求される.このことか19 ら,RMS 変動 0.1 mm 以下,0.1 Hz 付近の変動で 3×10−10m/𝐻𝑧12以下の相対変動が求められ る.
3.5 DECIGO の軌道
DECIGO の制御に対して高度な精度が求められるため,受ける外力を最低限におさえ ることのできるより安定な軌道の選択がとても重要になってくる.その際に考慮するべ きことは以下の点が挙げられる. 1. S/C 間の相対加速度が小さい 2. S/C 生存からの要請で,太陽電池発電が困難でない 3. 通信の要請で,地球からの距離が遠すぎない 4. 推力/重量からの要請で,軌道投入が困難でない 今現在は打ち上げる軌道の候補として地球公転軌道上を地球の後ろに追随する軌道が 有力となっている. 図 3.4 DECIGO の軌道20
参考文献
(3-1) チン タン:小型重力波観測衛星 DECIGO Pathfinder 用試験マス制御系の開発, 東京大学大学院,修士論文 (3-2) 安東 正樹,川村静児:宇宙重力波望遠鏡 DECIGO (3-3) 川村静児:スペース重力波アンテナ DECIGO (3-4) 重力波プロジェクト推進室 Tamago.mtk.nao.ac.jp/spacetime.decigo_j.html21
第 4 章 実験体系
4.1 実験装置
4.1.1 小型真空容器
実験には,内径 0.6 m,長さ 1 m の円筒型 SUS 製真空チャンバを使用した.この小型真空 容器は全実験を通して電気的にアースされ,基準電位となっている.使用した真空排気装 置を図 4.1 に示す. ・ロータリーポンプ 1 台 (排気速度 900 l/sec) ・ターボ分子ポンプ 1 台 (排気速度 520 l/sec) ロータリーポンプは粗排気用に,ターボ分子ポンプは高真空時にそれぞれ使用した.到達 圧力は 0.6×10−5 Torr であった.圧力の計測にはピラニーゲージとイオンゲージを用い た.それぞれの写真を図 4.2 に示す. 図 4.1 小型真空容器22
23
4.1.2 イオン源
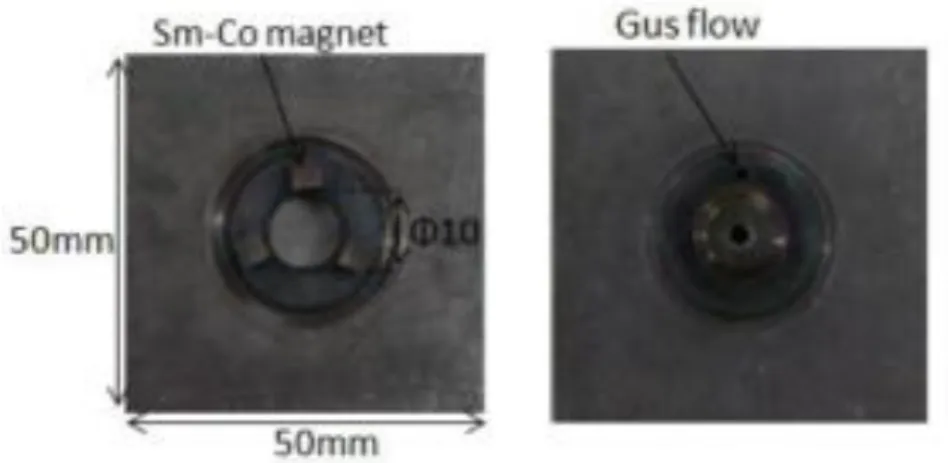
本研究では,平岡が設計した中和器と杉田が設計したイオンスラスタ(4-1)をイオン源と して使用した.杉田が設計したイオンスラスタを図 4.3 平岡が設計した中和器を図 4.4 に 示す.以下より,杉田のイオンスラスタをイオン源 A,平岡が設計した中和器をイオン源 B とする.イオン源 A は 50×50 mm の箱型で Al 製の放電室の周りに 4×4×12 のサマリウ ムコバルト磁石(Sm-Co 磁石)を 9 個設置し,長さ 12 mm 内径 21 mm の放電室を採用し ている.この磁石は脆くて欠けやすい欠点があるが,高い磁気特性を持ち,また温度特性に 優れ高温での使用にも比較的向いている.イオン源 B は銅製で,長さ 32 mm,内径 21 mm, 外径 25 mm の放電室を採用しており,放電室の周囲に 4×4×12 mm のサマリウムコバル ト磁石を 9 個配置し,それらをバックヨーク,フロントヨークと呼ばれる軟鉄製部品で挟 んでおり,放電室周囲の磁石の数によって内部磁場の形状を変更することができ,フロン トヨークの内側にもサマリウムコバルト磁石を図 4.5 のように 3 つ配置している.これら のサマリウムコバルト磁石と放電室を挟むヨークによって磁気回路を形成している.外 側のサマリウムコバルト磁石の数が 9 個のときの磁場形状を図に示す.すべての実験に おいて放電室内部に磁気ミラーを形成させ,効率よくプラズマを生成できるようにして いる.マイクロ波周波数 1.6 GHz では 57 mT の位置で ECR 層を形成する.フロントヨーク には直径 10 mm の穴が空いており,そこをオリフィスとしいている.この穴が電子の放出 出口となる. バックヨークの中心に SMA コネクタを介してアンテナを固定した.アンテナにはモリ ブテン製で,直径 1 mm,29 mm の円柱型で直線のものを採用した.マイクロ波は SMA コネ クタを通してアンテナに伝送している 図 4.3 イオン源 A 図 4.4 イオン源 B24
図 4.5 イオン源 A の概略
図 4.6 イオン源 B の概略 図 4.7 可視化したイオン源 B
25 図 4.9 イオン源 B の磁場形状 (T)
4.1.3 グリッド
本研究では自分で新しく設計したグリッドと平岡のグリッドの 2 種類のグリッドを使 用した.平岡のグリッドは本研究の条件のもとに設計されたものではないため,新たにグ リッドを設計した.以下より,平岡のグリッドをグリッド A,新しく設計したグリッドをグ リッド B とする.下の図 4.7 図 4.8 はグリッド B のオリフィス側かと外側から見た写真で ある.グリッドには目標値の電流である 3 mA でイオンビームの発散角がより小さい値と なるように,アクセルグリッドとスクリーングリッドの厚さ,孔径の大きさを選んだ.それ ぞれの大きさは表 4.1 表 4.2 に示している.2 枚のグリッドは,スクリーングリッドをオリ フィスプレートに固定し,またその上からアクセルグリッドをセラミックねじで 1 枚に 固定されている.26 図 4.7 グリッド (オリフィス側) 図 4.8 グリッド (外側) 表 4.1 アクセルグリッドとスクリーングリッドのパラメーター (グリッド A) 孔径 (mm) 厚さ (mm) 孔数 (個) ピッチ (mm) アクセル 0.7 0.3 91 1.5 スクリーン 1.2 0.3 91 1.5 表 4.2 アクセルグリッドとスクリーングリッドのパラメーター (グリッド B) 孔径 (mm) 厚さ (mm) 孔数 (個) ピッチ (mm) アクセル 0.7 0.3 19 1.5 スクリーン 0.9 0.4 19 1.5 また,この 2 枚のグリッドから出るイオンビームの軌道は図 4.9 図 4.10 のとおりである. グリッド A の発散角は 25.64,グリッド B の発散角は 11.59 で,グリッド B の発散角が小さ いことがわかる.このイオンの軌道はイオンビーム計算プログラムを用いた.黄線がイオ ンビーム軌道,赤線がポテンシャルを示している.
27
図 4.9 グリッド間から出るイオンの軌道(グリッド A)
28
4.1.4 その他の機器
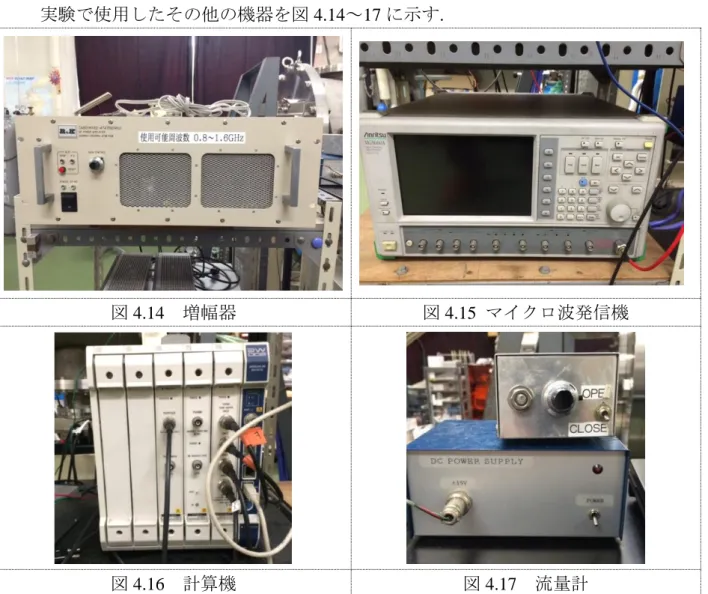
実験で使用したその他の機器を図 4.14~17 に示す.
図 4.14 増幅器 図 4.15 マイクロ波発信機
29
4.2 実験
4.2.1 信号による電圧引き出し実験
本研究では DECIGO で使用する推力可変であるスラスタを開発する.最初に,イオンス ラスタのアクセルグリッドに印加する電圧をパルス的に変化させる回路を作成した.回 路図を図 4.11 に示す.これによってアクセルグリッドとスクリーングリッドの間でイオ ンを加速させる時間をパルス的に変化させ,推力を変化させる.実験では 4V の電圧の信号 をそれぞれ 100 Hz の周波数と 200 Hz の周波数であたえた.この回路において,それぞれの 信号とその信号によって引き出された電圧の関係を実験した. 図 4.11 回路図(4-2)30
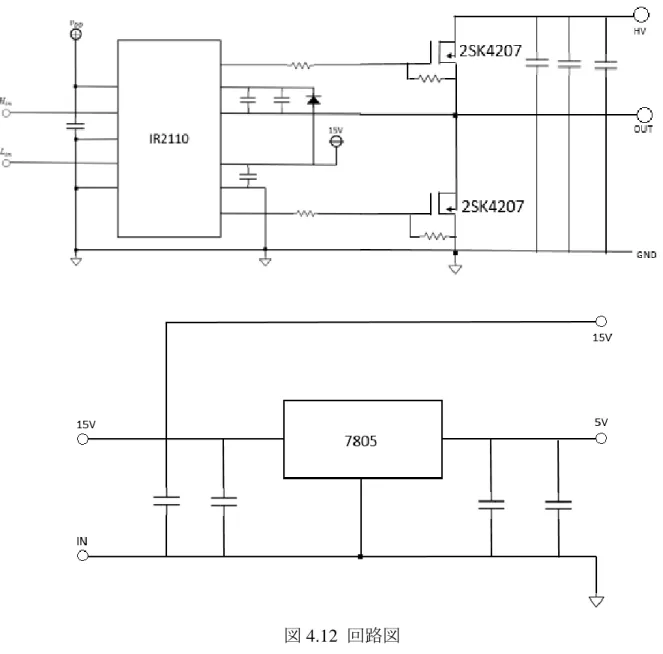
4.2.2 duty 比可変範囲測定
グリッド A を付けたイオン源 A にマイクロ波を投入してプラズマを生成したあとに 2 枚のグリッド間に電圧を印加する.パルス電圧の印加時間を制御することで推力を変化 させるため,duty 比の可変範囲を調べる. 4.2.1 で作成した回路に duty 比を変化させる回路を付け加え,測定では信号の周波数や duty 比を変化させ,duty 比の可変範囲の測定をした.回路図を図 4.12 に示す. 測定した電流はビーム電流でスクリーングリッドからアクセルグリッドを通ってイ オンスラスタの外に出て行く電流であり,電圧はアクセルグリッドにかけている電圧で ある.電流はイオンスラスタの前方に置かれたコレクタから算出される.回路には電源か らスクリーングリッドに 500 V の電圧をかけており,アクセルグリッドに信号で 500 V の 電圧が印加された時は電位差がなくなり,電流が流れない.信号がなくなると,500 V の電 位差が生じて電流が流れる.使用したマイクロ波は 2.45 GHz である.31
32
4.2.3 電流引き出し実験
DECIGO では 0.1~100μN というかなり小さい推力の制御が求められるため,低流量の推 進剤で,そして,低電力で安定して十分なプラズマを維持できるようにイオン源 B を採用 した.さらに,このイオン源 B に duty 比制御に用いたグリッド A よりも,イオンビーム発散 角が小さいグリッド B を取り付けて実験を行った.これによって,より安定したイオンビ ームを引き出すことができる.グリッドのイオン放出口の前方に電子コレクタを設置し, このイオン源とグリッドに投入したマイクロ波の電力と引き出した電流値を測定した. この実験は,推進剤にキセノンを使用し,推進剤流量は 0.05 sccm,マイクロ波周波数は 1.6 GHz,圧力 0.6×10−5 Torr の条件のもと行った33
参考文献
(4-1) 杉田健策:小型マイクロ波放電式イオンスラスタのマイクロ波周波数依存性,平成 23 年度,九州大学修士論文
(4-2) FAST HIGH VOLTAGE TRANSISTOR SWITCHES
34
第 5 章 実験結果・考察
5.1 実験結果
5.1.1 信号による電圧引き出し実験結果
実験結果を図 5.1 と図 5.2 に示す.信号の電圧を Signal ,引き出された電圧を Output とし た。 図 5.1 100 Hz の信号 図 5.2 200 Hz の信号 100 Hz,200 Hz どちらの場合でも,回路に加えた信号により出力された電圧のグラフか ら電圧と信号が同じタイミングになることが確認できた.35
5.1.2 duty 比可変範囲の測定結果
実験結果を図 5.3~図 5.6 に示す. 図 5.3 信号と電流 (100 Hz) 図 5.4 信号と電圧 (100 Hz) 図 5.5 信号と電流 (1 kHz) 図 5.6 信号と電流 (duty 比 99.9%) 図 5.3 と図 5.4 は,回路に duty 比が 20%,周波数が 100 Hz の信号を印加した結果である. あらかじめ,スクリーングリッドには電源から 500V の電圧がかかっており,アクセルグリ ッドに信号によって 500V の電圧が印加されたときには,スクリーングリッドとアクセル グリッドの間の電位差が 0V になり,電流が流れていない.逆に,信号が無く,アクセルグリ ッドに印加される電圧が 0V のときは,スクリーングリッドとアクセルグリッドの間に電 位差 500V が生じ,電流が引き出されていることが実験から確認することができた. 図 5.5 は,回路に 1 kHz の信号を印加した結果である.正常に電流が引き出せている図 5.3 と比較して,電流の引き出しの立ち上がりになまりができ,尐しの遅れやノイズが生じ る結果となった. 図 5.6 は,回路に duty 比が 99.9%の信号を印加した結果である.このときも,周波数を高 くしたときと同様に,電流の引き出しに尐しの遅れやノイズが生じた.これによって,この 回路に印加させる duty 比の可変範囲は 1~100%の 100 倍の範囲であることが確認でき た.36
5.1.3 電流引き出し実験結果
実験結果を図 5.7 に示す. 図 5.7 マイクロ波の投入電力と引き出した電流 電流引き出し実験の結果として,マイクロ波の投入電力 2W,推進剤流量 0.05 sccm では 35μA と,目標値 3 mA の約 1/100 の電流しか引き出すことができなかった.37
5.2 考察
実験それぞれについて考察する. 1つ目の信号による電圧の引き出し実験では実験結果のとおり,周波数を変化させて も,与えた信号と同じタイミングで電圧を引き出すことができ,正常に HTS transistor switch で制御することができていることが確認できた. 2つ目の duty 比の可変範囲の測定は,まず正常に電流を引き出せたときを考察する.か ら,duty 比が 20%,周波数が 100 Hz の信号によって,アクセルグリッドに 500 V の電圧が引 き出されたとき,スクリーングリッドにはあらかじめ,電源から 500 V の電圧が印加され ており,電位差が 0 V となるため,電流が流れないことが実験から確認することができた. 次に,正常に電流を引き出すことができなかったときを考察する.信号の周波数を 1 kHz, duty 比を 99.9%にすると,実験結果のグラフからわかるように,電流の立ち上がりになま りが見え,ノイズが入る結果となった.これはスイッチング間隔がきちんと制御できてい ないことが考えられるため, MOSFET に高速 MOSFET を採用し,スイッチの遮断時に生 じる過渡的な高電圧を吸収するためにスナバ回路を追加するとよいと考えられる.これ によって信号を切り替えた瞬間に生じたノイズを取り除くことができると考えられる. 3つ目の電流引き出し実験では,目標値の約 1/100 の電流しか引き出すことができなか った.この実験では低流量・低電力で安定してプラズマを維持できるようにイオン源 B を 使用した.しかし,イオン源 B はイオン源 A と比較してオリフィス径が小さいことなどの 要因でイオン源としては適していなかったことが考えられ,電子の引き出しには適して いたがイオンの引き出しには適していなかったと考えられる.38
第 6 章 結論と展望
本研究では,DECIGO に用いられる 0.1~100μN の推力の可変範囲があり, 2W, 0.05sccm で 3 mA の電流を引き出すことのできるイオンスラスタについて研究した. ・信号を送るとその信号と同時に電圧を引き出すことができる回路を作成し,実験結果か らも回路が正常に働いていることが確認できた. ・duty 比が 20%,周波数が 100 Hz の信号では duty 比を正常に制御することができ,電流の 引き出しにも成功した. ・推力の可変範囲については,目標値の 1/10 の可変範囲である 100 倍の可変範囲まで duty を制御することができた.しかし,それ以上の duty 比では正常に電流を引き出すことが できなかった. ・実験を行った duty 比で正常に電流を引き出せるように, スイッチング時に生じていた ノイズを取り除くために回路に高速 MOSFET を使用し,合わせてスナバ回路を採用し, 回路を改良する必要がある。 ・電流の引き出しについては,目標値の 1/100 までの電流しか引き出すことができなかっ た. ・低流量・低電圧で安定してプラズマを維持できるように採用したイオン源 B はイオン 源 A と比較してオリフィスの径が小さい.そのため,電子の引き出しには適していたが, イオンの引き出しには適しておらず,今回の実験では適していなかった. ・DECIGO に必要とされる推力がとても低いため,尐量の電流を引き出すためのプラズマ を安定して維持することは難しい.39