早稲田大学大学院国際情報通信研究科
博 士 論 文
論 文 題 目
人体通信を用いた人体部位 及び形状識別に関する研究
Study on Body Parts and Body Figure Identification Employing Intra-Body Communication
申 請 者
小林 直
Nao KOBAYASHI
国際情報通信学専攻 無線・衛星通信研究Ⅱ
目次
第 1 章 序論... 1
第 2 章 人体通信...6
2-1 電界方式・電流方式... 6
2-1-1 電界方式の研究動向...7
2-1-2 電流方式の研究動向...7
2-2 人体通信を利用したアプリケーション... 8
2-2-1 IBC誘導システム...9
2-2-2 タッチボイスシステム...10
2-2-3 モバイルヘルスケアシステム... 11
2-3 人体認識技術... 13
2-3-1 プローブの基礎特性...14
2-3-2 人体及び空間の伝搬特性...17
2-3-3 FDTD法を用いた電磁解析シミュレーション...18
2-4 むすび... 21
第 3 章 手首の動き識別方式...22
3-1 手首の動き識別方式概要... 22
3-2 手首の動き評価モデル... 23
3-2-1 FDTD 法を用いた手首の動き評価モデル...24
3-2-2 手首の動き実験評価モデル...27
3-2-3 手首の動き識別方式シミュレーション及び実験結果...28
3-3 手首の動き識別方式の評価モデル... 29
3-3-1 最適な装着箇所の評価結果...29
3-4 マハラノビスの距離を用いた評価概要... 31
3-5 手首の動き識別方式の識別結果... 32
3-6 手の形状識別... 36
3-6-2 ジャンケン識別評価結果...37
3-7 むすび... 38
第 4 章 指識別方式... 39
4-1 指識別方式概要... 39
4-2 指識別モデル... 41
4-3 指識別方式に最適なプローブ評価モデル... 43
4-3-1 指識別方式に最適なプローブ評価結果...44
4-3-2 指識別方式におけるシミュレーション評価結果...45
4-4 手首から各指までの伝搬特性... 46
4-5 指識別方式における評価概要... 47
4-6 指の識別情報の作成... 47
4-7 指識別方式における最大受信電力及び信号の到達時間を用いた実験概要... 50
4-7-1 最大受信電力及び信号の到達時間を用いた実験及び識別結果...51
4-7-2 最大受信電力差及び信号の到達時間差を用いた実験及び識別結果...53
4-7-3 到達時間差を用いた識別の課題...55
4-7-4 差分時間増幅法...56
4-8 指識別方式における位相差及び受信電力差を用いた識別... 59
4-8-1 位相差及び受信電力差を用いた実験概要...59
4-8-2 位相差及び受信電力差を用いた実験及び識別結果...60
4-9 拡張キー入力方式... 64
4-9-1 拡張キー入力モデル...64
4-9-2 拡張キー入力方式における位相差及び受信電力差を用いた実験概要...66
4-9-3 拡張キー入力方式における識別評価...66
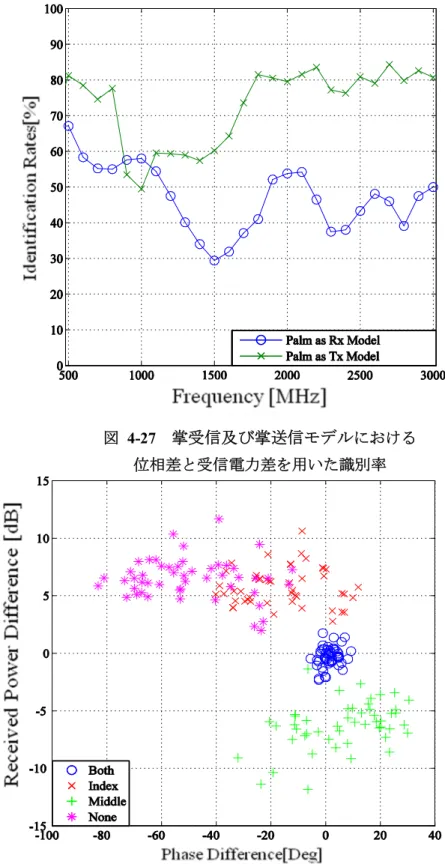
4-9-4 掌受信モデル及び掌送信モデルの識別結果...67
5-2 パームタイピング方式... 72
5-3 パームタイピング方式における位相差を用いた実験概要... 74
5-3-1 位相差を用いた実験及び識別結果...76
5-4 パームライティング方式... 78
5-4-1 パームライティング方式における位相差を用いた実験概要...78
5-4-2 位相差を用いた実験結果...79
5-5 掌上軌跡に基づく文字認識... 81
5-5-1 実験データの変形による文字認識...82
5-5-2 辞書データの作成...84
5-5-3 辞書データの変形による文字認識...85
5-6 むすび... 86
第 6 章 結論... 87
謝辞... 89
参考文献... 90
図目次
図 1-1 各章の位置付け... 5
図 2-1 人体通信を利用したアプリケーション... 9
図 2-2 IBC誘導システム... 9
図 2-3 タッチボイスシステムダイアグラム... 10
図 2-4 タッチボイスシステム...11
図 2-5 モバイルヘルスケアシステム... 12
図 2-6 Kinectを利用した体感ゲーム... 13
図 2-7 Six Senseのアプリケーション例... 14
図 2-8 プローブ構成図及び実験構成図... 15
図 2-9 プローブの装着状態... 15
図 2-10 プローブの入出力特性... 16
図 2-11 プローブの定在波比... 16
図 2-12 人体と空間における伝搬特性とノイズ... 18
図 3-1 手首の動き識別方式を利用した空間文字記述システム... 22
図 3-2 各装着状態におけるVSWR... 23
図 3-3 各装着状態におけるVSWR の標準偏差... 24
図 3-4 モデル化を行った人体手部... 26
図 3-5 縦方向における手首の動き識別... 27
図 3-6 人体手部におけるVSWR シミュレーション及び実験結果... 28
図 3-7 人体手部におけるシミュレーション及び実験結果のVSWR 差... 29
図 3-8 手首縦方向の実験結果... 30
図 3-9 手首横方向の実験結果... 31
図 3-10 参照サンプル数と識別率の推移... 32
図 3-15 ジャンケンモデル... 36
図 3-16 ジャンケンの識別結果... 37
図 4-1 指識別方式... 40
図 4-2 指識別方式を用いた電子手話システム... 41
図 4-3 指識別アプリケーション... 41
図 4-4 両側端受信モデル... 42
図 4-5 両側端送信モデル... 42
図 4-6 人体手部モデル及びプローブモデル... 43
図 4-7 各プローブを用いた人体手部の電界強度... 44
図 4-8 手首両側面から各指までの電界強度の差... 45
図 4-9 各指から右側端受信機までの伝搬特性... 46
図 4-10 各指から左側端受信機までの伝搬特性... 47
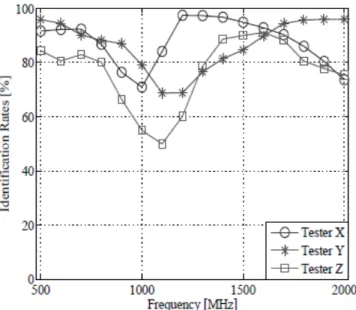
図 4-11 右側端受信における識別情報... 51
図 4-12 左側端受信における識別情報... 52
図 4-13 両側端受信モデルにおける識別情報... 53
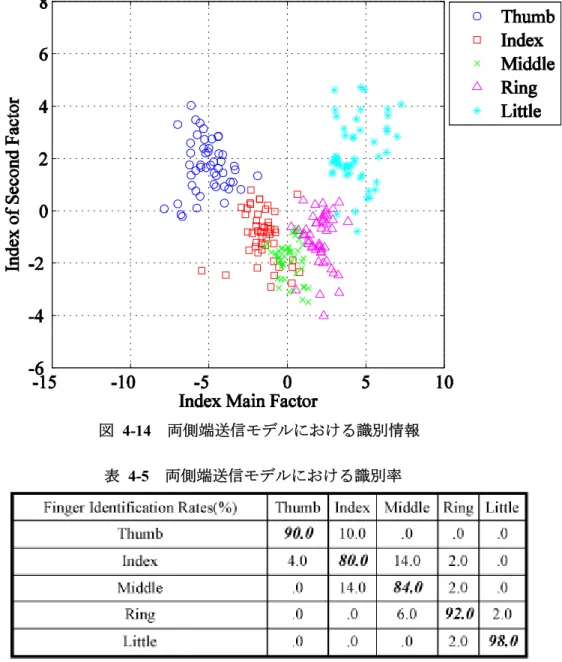
図 4-14 両側端送信モデルにおける識別情報... 54
図 4-15 分解能と識別率... 56
図 4-16 差分時間増幅法を用いた指識別... 57
図 4-17 差分時間増幅法を用いた増幅時間... 58
図 4-18 左側端受信モデルにおける受信電力差と位相差を用いた指識別率... 60
図 4-19 両側端受信モデルにおける受信電力差を用いた指識別率... 61
図 4-20 両側端受信モデルにおける位相差を用いた指識別率... 62
図 4-21 両側端受信モデルにおける全ての情報を用いた指識別率... 63
図 4-22 複数人における両側端受信モデルの指識別率... 63
図 4-23 EKIS端末構成例... 65
図 4-24 拡張キー入力を適用した携帯電話機... 66
図 4-25 掌受信モデルにおける識別率... 67
図 4-26 掌送信モデルにおける識別率... 68
図 4-28 掌送信モデルにおける周波数2.7 GHz の実験結果... 69
図 5-1 掌識別方式... 72
図 5-2 パームタイピング... 73
図 5-3 両側端受信モデルを適用した手部及びペン型プローブ... 74
図 5-4 掌識別方式概要... 75
図 5-5 ペン型プローブ構成図及びVSWR... 76
図 5-6 パームタイピング実験結果... 77
図 5-7 1.5 GHz における実験結果... 77
図 5-8 パームライティング... 78
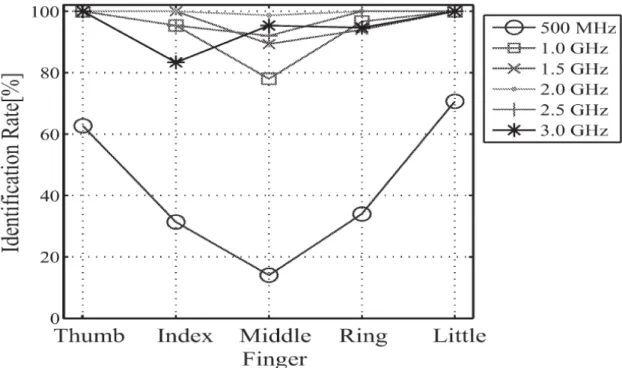
図 5-9 500 MHz における実験結果... 79
図 5-10 1.0GHz における実験結果... 80
図 5-11 2.0 GHzにおける実験結果... 80
図 5-12 3.0 GHzにおける実験結果... 81
図 5-14 1.5 GHz における実験結果... 83
図 5-16 アルファベット記述例... 85
表目次
表 2-1 各企業における人体通信の研究動向... 7
表 2-2 ネットワークアナライザのスペック... 17
表 3-1 手首の動き識別実験パラメータ... 27
表 3-2 複数の被験者における手の情報... 35
表 4-1 最大受信電力及び信号の到達時間を用いた実験パラメータ... 50
表 4-2 右側端受信機における識別率... 51
表 4-3 左側端受信機における識別率... 52
表 4-4 両側端受信機における識別率... 53
表 4-5 両側端送信モデルにおける識別率... 54
表 4-6 差分時間増幅法を適用した各指までの到達時間... 58
表 4-7 位相差及び電力差を用いた実験パラメータ... 59
表 5-1 被験者の掌の情報... 73
表 5-2 複数の被験者の掌の情報... 75
表 5-3 パームタイピング実験パラメータ... 76
表 5-4 パームライティング実験パラメータ... 79
表 5-5 ダイナミックタイムワーピング距離... 85
表 5-6 複数の被験者におけるダイナミックタイムワーピング距離... 86
第1章 序論
近 年 ,近 距 離 無 線 通 信 が 可 能 な 携 帯 電 話 や ゲ ー ム 機 と い っ た 機 器 類 ,近 距 離 無 線 通 信 を 利 用 し た 電 子 マ ネ ー 等 の シ ス テ ム ,高 速 通 信 の た め に 近 距 離 無 線 通 信 環 境 を 提 供 す る 無 線 ス ポ ッ ト 等 が 急 増 し て い る .こ れ ら の 増 加 に 伴 い ,情報端末の軽量化,小型化が注目を浴びている.情報端末の軽量化,小型化 技術が発達する事でウェアラブルな情報端末の使用形態が幅広くなり,様々な情報端末 を身に付けた状態で行動するユーザが増加すると考えられる.このような複数の情報端 末を身につけた場合,端末間を接続するBody Area Network(BAN)[1] の活用が期待で きる.BAN を構築する事で,身につけた複数の情報端末の連携・運用・管理が容易に なるだけでなく,端末も省電力化する事が可能になる.BANは2012年5月21日に標 準化作業が完了しており,通信範囲約3 m,最大伝送速度約10 Mbps,3 Vで数mAの 消費電力動作の無線デバイスを対象としている.また,周波数は体内埋め込み型(402 ~ 405 MHz),医用テレメータ(420 ~ 450 MHz),ISM帯(2.4 GHz),UWB(3.1 ~ 10.6
GHz)等があり,人体通信としては21 MHz及び32 MHzがある.ここで,人体通信と
は人体を信号の通信伝達媒体に用いて,体に装着した端末と体の外部,または体の内部 の端末との短い距離を結ぶ近距離無線通信である.人体通信のメリットとして,人体を 通信媒体とするので,ケーブルが不要である事,信号は人体内部または人体表面を通る ため,電磁波ノイズや障害物等からの影響を受けにくい.さらに,他の無線通信技術と 違い外部に発信する事を目的としていないので,送信電力及び消費電力が低いといった 特徴を持っている.
本論文は人体通信の特徴を活かした人体部位識別方式について評価した筆者の一連 の研究結果をまとめたものである.以下に各章の概要を述べる.
第1章 序論
式について述べる.また,各研究機関における人体通信の研究動向及び本論文で用いる人 体通信技術である Intra-Body Communication(IBC)を利用した研究例を複数紹介する.そ して,本論文の実験に用いている人体に装着するプローブの性能を評価し,電磁解析シミ ュレーションに用いる時間領域差分法(FDTD: Finite-Difference Time-Domain method)の概 要について述べる.さらに,人体部位識別方式の類似研究,システムとして,複数の技術 例を紹介し,本論文で述べる人体通信を用いた人体部位特定方式との差異について述べる.
第3章 手首の動き識別方式
第 3 章では,人体の手首の動きを識別する手首の動き識別方式について述べる.手首の 動き識別方式は手首の縦方向及び横方向の傾きを識別することを目的としている.手首の 動き識別方式を用いる事で,携帯電話等の小型端末を持った手首の動きに合わせた機械操 作,空間上での文字の記述,手の形状認識等といった新しいヒューマンマシンインタフェ ースで活用が期待できる.手首の動き識別方式は人体にプローブを装着した状態で定在波 比(Voltage Standing Wave Ratio : VSWR)を計測し,手首と手の傾きの違いから手首の位置 を識別する.本方式の評価として,最初に,プローブを装着する手首に複数の装着箇所を 設け,装着箇所によるVSWRの違いを求める.次に,手首上面にプローブを装着した状態 におけるVSWRの計測実験とFDTD法を用いた電磁解析シミュレーションにより,人体手 部を評価する.評価対象としては,手首の角度が異なる三種のモデルを用いており,実験 結果及びシミュレーションモデルそれぞれにおいて,モデルによって定在比が異なる事を 示す.続いて,手首に設けた複数の装着箇所における縦方向及び横方向に手首を動かした 時のVSWRを計測し,識別率の観点から評価する.本評価結果から,縦方向の動きにおい てはプローブを手首の上面及び下面に装着,横方向の動きにおいてはプローブを手首左側 面及び右側面に装着する事で縦方向及び横方向の動きが識別可能である事を示す.
さらに,手首の動き識別方式のアプリケーション例として,手の形状認識技術の評価を する.本技術は手の形状を認識する事を目的としており,手話の認識,手の形状をキーと して認証を行うシステム,空間上での指識別方式等といった新しいサービスへの可能性を 持っている.本論文では手の形状認識としてジャンケンの形状を用いて評価しており,評 価結果から,手首の動き識別方式同様,VSWR を用いる事でグー,チョキ,パーそれぞれ
第4章 指識別方式
第 4 章では,人体部位識別方式として,指識別方式について述べる.指識別方式は人体 の指の識別を目的としており,本技術を実社会に用いる事で様々なサービスや福祉システ ムの利便性の向上が期待できる.例えば,ボタンで操作をする機器に対し,ボタンの代わ りに指を用いる事で,複数のボタンを使い分ける必要がなくなり,機器のユーザインター フェースを単純化する事が可能になる.
指識別方式の評価として,FDTD法を用いた電磁解析シミュレーションから各指の電界強 度を計算する.計算結果から,指識別方式に最適なプローブ及び指事に電界強度が異なる 事を明らかにし,指識別方式が実現可能であることを示す.続いて,実験では,実際に手 首両側面にリストバンド型プローブを装着し,手首から指先で触れるボタン型のプローブ までの到達時間差及び最大受信電力差,各周波数における位相差及び受信電力差を計測し,
評価する.評価方法として,正準判別分析を用いて指を正しく識別できる確率である識別 率を定義し,識別に有効なパラメータを求める.識別結果から,到達時間差及び最大受信 電力差を用いた指識別方式,位相差及び受信電力差を用いた指識別方式が実装可能である 事を示す.また,到達時間差及び最大受信電力差を用いた指識別方式に関しては,実シス テムを想定した場合に考えられる問題とその解決策である差分時間増幅法について述べ,
差分時間増幅法を用いる事で,到達時間差及び受信電力差を用いた指識別方式が実現可能 である事を示す.
さらに,指識別方式を用いたアプリケーションとして,拡張キー入力方式(Enhanced Key
Input Scheme : EKIS)を評価する.EKISは,携帯端末上にある電極等に指で触れた際に,
それがどの指で触れているか人体通信を用いて識別する事を目的としている.本技術を用 いる事でキー入力の迅速化及び簡略化等が可能になり,携帯電話等の片手で操作する小型 端末の操作性の向上が期待できる.本論文では二つの電極を持つ2種類のEKIS端末を用い て,電極に人差指で触れるモデル,電極に中指で触れるモデル,電極に人差指と中指それ
手に携帯電話やPDAといった小型端末を持たずに,掌上をタブレットやキー入力デバイス として用いる事が可能になる.また,掌上での機器操作,使用者の掌情報とキー入力情報 の併用も可能であり,強固なセキュリティシステムを構築する事が出来る.さらに,キー 入力を行う場所及びキーとする情報を使用者が独自に決定する事で,使用者特有の情報を 作成する事も可能になる.本論文では掌識別方式として,単スポット認識の観点から,掌 上に設けた複数の観測点を識別するパームタイピング方式を評価する.評価方法として,
ペン型プローブを用いて,掌上に設けた観測点に複数回触れ,その識別率を求める.また,
識別には指識別方式で効果的であった位相差を用いており,識別結果からパームタイピン グが実現可能である事を示す.
さらに,掌識別方式を用いたアプリケーションとして,掌上に文字を記述し,認識する 事を目的としたパームライティングを評価する.本技術を用いる事で,掌上をメモ帳とし て利用するだけじゃなく,掌上に記述された筆跡情報と使用者の掌の情報を組み合わせた 特有の情報も作成する事ができるようになる.本技術の評価方法として,パームタイピン グは単スポット認識として評価したが,パームライティングは掌上軌跡認識の観点から評 価する.また,文字の認識方法として,既存のOCRソフトを用いた文字認識及びダイナミ ックタイムワーピング距離を用いた文字認識をそれぞれ行い,評価結果から掌識別方式が 実現可能である事を示す.
第6章 結論
第6章では研究の成果をまとめ,結論を述べる.
人体部位形状認識
第2章 人体通信
・人体通信の研究動向及び人体通信を利用したシステムに付いて述べる.
・人体及び空間の伝搬特性,人体に装着するプローブの基礎特性を示す.
応用技術
応用技術 第3章 手首の動き識別方式
手首の動き識別方式の評価
シミュレーション及び実験から本 方式の妥当性を示す .
実験環境及び手首周辺における VSWRの違いから手首の動き識 別方式を評価する.
手の形状識別技術
ジャンケンの識別を評価する.
第5章 掌上識別方式 掌識別技術への応用
掌上に設けた観測点を識別するパーム タイピング,掌上に記述した文字を識別 するパームライティング実現のため,位 相差を用いた実験を行い評価する.
第4章 指識別方式 指識別方式の評価
シミュレーション及び実験から本方式の妥 当性を示す.
手首から各指までの到達時間差,受信電力 差,位相差を用いて,各指を識別し,指識 別方式を評価する.
拡張キー入力技術の評価
小型端末上での指識別方式を評価する.
第2章 人体通信
人体通信は人体に装着した通信端末と体の外部,または体の内部にある通信端末との 短い距離を結ぶ近距離無線通信である.人体通信を利用することで,人々は意識するこ となく,より簡単に,そして安全に情報のやり取りを実現することが可能になる.
人体通信が新しい通信方式として注目を浴びるようになったのは MIT のZinmerman [2] が通信媒体として人体を用いた論文が発端となっており,人体を伝送経路として用 いて,人体上及び人体近傍の電子装置間におけるデジタル情報の通信に成功している.
人体通信は人体周辺を伝送範囲とするので外部との通信を目的とした他の近距離無 線通信に比べて送信電力及び消費電力が非常に小さい.そして,その信号も人体内部ま たは人体表面を通るため,外部へ信号がもれにくい.さらに,人が能動的にリーダに近 付く,触れるといった行動をしなければ通信路が確立しないので,セキュリティ面にお いても非常に注目されている.また,自分自身の体を通信路として占有できるので大容 量の通信にも期待できる.
人体通信は送信電力が小さく,電磁波ノイズも小さい性質から様々な電子機器が置か れている医療現場での適用が期待されている.例えば,複数の生体センサを装着する必 要がある患者にとって,人体に装着した各種センサと機器を結ぶ煩わしいケーブルを省 く事が可能になるだけでなく,電磁波ノイズが少ない性質から人体通信を用いた無線環 境の構築も可能になる.上記の利点を考慮すると,端末間を結ぶ次世代の通信手段とし て,人体通信は有力な技術であると言える.
2-1 電界方式・電流方式
人体通信は大きく分けて電界方式 [2][3] と電流方式 [4]-[9] に大別することができ,
表2-1は各企業における人体通信の研究動向を示す.
電界方式の特徴として,送信端末及び受信端末と人体が直接触れる必要がなく,さら に信号経路に絶縁体があっても通信が可能である.しかし,人体の周りに誘起した電界 はコモンモード雑音の影響を受けやすく,その信号も地面へ逃げるため,検出できる信
体を導管として生成された信号を伝送する方式である.電流方式は電界方式と比べ送受 信機が安価であり,構成も比較的単純である.また,人体とグラウンドは容量結合して いるため,コモンモード雑音の影響も受けにくい.しかし,安定した通信を行うために は人体に電極を接触させている必要がある.
2-1-1 電界方式の研究動向
電界方式の研究動向として,[2] では,1 nAより低い電流と500 KHz帯のキャリア周 波数を用いて,データ転送速度9.6 Kbpsを達成している.また,本方式では入力インピ ーダンスに特殊な電気光学センサを用いており,本センサは人体を通して不安定で弱い 電界の測定に役立つ高い入力インピーダンスを持っている.しかし,身体がシールドの 役割をしたり,装置上に手を置いたりすると電界は変調できなくなる恐れがある.
続いて,[3] は[2] より,高い転送速度と動作範囲の拡張を達成している.[3] の電界 センサは,電気光学結晶とレーザーライトで実装している.これは受信側で電圧の上下 による電気光学結晶の光学的な性質の変化をレーザー光で検出する技術を用いた電界 センサが読み出し,伝送を行う方式である.
表 2-1 各企業における人体通信の研究動向
Panasonic KDDI NTT
Method Electric Current Electric Current Electric Field Frequency(Hz) 533 K 3 M(Center Frequency) 5 M - 20 M
Data Rates(Bps) 3.7 K 17 M 230 K 10 M -
Modulation ASK OFDM ASK ASK
ている.[7] では人体伝搬の特性と MSK,QPSK,16QAM の三つの変調方式を用いて 人体に適している変調方式を実験により評価している.評価結果から,人体伝搬の特性 は,移動しない状態かつ送信機と受信機の距離が最も短い場合に通信の質が高い事が示 されており,変調方式においてはMSKが最も EVMが低く,人体通信に適切な変調ス キームであると評価されている.
[5] は電流方式を用いた高速通信の研究であり,OFDMを用いた高速通信を実現して いる.また,1-40 MHzの周波数帯域において人体と空間における伝播損失の違いを明 らかにしている.
本論文で利用している IBC は電流方式に基づいており,人体表面に微弱な電磁波を 送信し,人体の内部または外部と通信を行う.
2-2 人体通信を利用したアプリケーション
人体通信を用いたシステムはユーザが自立的に,またはユーザやシステムの意思で容 易に情報の送受信が可能なため,様々な利便性を持ったアプリケーションを構築する事 ができる.例えば,ヘッドフォン型の人体通信端末と音楽プレイヤー型の人体通信端末 を装着することで,音楽プレイヤーからヘッドフォンまで体を伝って音楽を配信するこ とが可能となり,有線による煩わしい配線が不要となる.また,リストバンド型の人体 通信端末にユーザが個人情報を入力すると握手による名刺交換が可能になり,鍵情報を 入力するとドアノブに触れるだけで解錠する事も可能になる.また,医療情報を入力す る事で,病院へ緊急搬送された際に,瞬時に医療記録または応急処置情報等を病院側は 参照する事が可能になり,迅速な処置が行える.このように,日常生活で人体通信を活 用したアプリケーションは膨大に考えられる.これは人体通信が世の中をより便利にす る可能性を秘めていると言い換える事ができる.
次節にて我々の研究室で検討されている人体通信を利用したアプリケーションであ る IBC 誘導システム,タッチボイスシステム,モバイルヘルスケアシステムについて 述べる.
2-2-1 IBC 誘導システム
図2-2は盲目の人や高齢者の人が目的の場所までを人体通信を用いて誘導する事を目 的とした IBC 誘導システムである[6].IBC 誘導システムは利用者が耳と足に送受信端 末を装着し,交通情報や近辺の施設案内の情報が送信されている道路を歩く事で,各種 情報を耳に装着した端末から得る事が可能である.以下に動作例の詳細を示す.
1. 利用者は情報が送信されている道路を歩く.
2. 足の端末と道路が密着することで通信が始まる.
3. 足の端末で得た情報が人体を通して耳の端末へと伝わる.
4. 耳の端末で得た情報を音声に変換することで,道路情報等を聞く事 ができる.
図 2-1 人体通信を利用したアプリケーション
Rx
2-2-2 タッチボイスシステム
本節で述べるタッチボイスシステム[10] はヘッドフォン型の端末を装着したユーザ がタッチボイスシステム本体正面に付属しているボタン(Plate)に触れる事で動作する.
このボタンにユーザが触れると,ボタンに触れている指から装着しているヘッドフォン まで,体を経由して音声が再生される.図2-3は我々の研究室で提案及び実装したタッ チボイスシステムの概要図であり,図2-4はタッチボイスシステムの実機である.実機 では四つのボタンを用いて,四種類の音声を流しており,実験では全てのボタンにおい て異なる音声を再生する事に成功している.本システムも IBC 誘導システムと同様に 目の障害を持った人々やお年寄りの人々の支援を対象としている.例えば,駅の切符売 り場で切符が売られている自動販売機に本システムを適応すると,切符販売機のボタン 以外の場所に触れると販売しているボタンの場所を知らせる音声が再生され,切符の値 段が羅列されているボタンに触れると値段の音声が再生され,目的地までの切符のボタ ンの位置及び値段を知ることができる.
図 2-3 タッチボイスシステムダイアグラム Information
TTrraannssmmiitttteerr
TrTraannssmmiitttterer T
Trraannssmmiitttterer T
Trraannssmmiitttterer ATATTT PPllaattee A
ATTTT PPllaattee ATATTT PPllaattee A
ATTTT PPllaattee
DD//AACCoonnvveerrtteerr
MuMullttii--TTrraacckk VoVoiicceeSiSiggnnaall
S
SttoorraaggeeFiFillee Multi-Track Voice Signal Sequence Control
SShhiieelldd
2-2-3 モバイルヘルスケアシステム
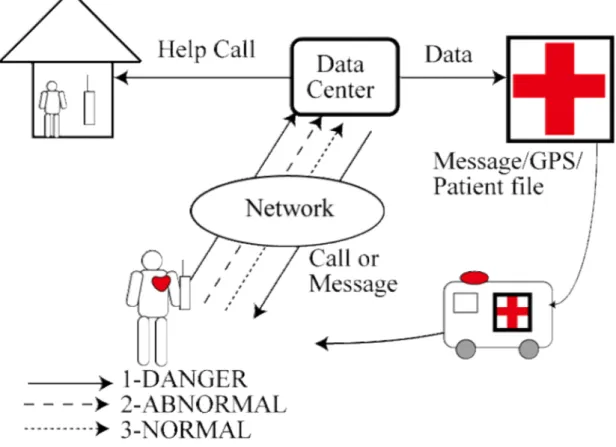
情報通信技術を医療分野に応用する際,医療機器など各デバイスと通信機器を結ぶ手 段としても人体通信は期待されている.[11] は人体通信を用いたモバイルヘルスケアシ ステムであり,入院中もしくは自宅療養中の患者の心拍数,血圧等の健康管理をワイヤ レスで可能にする事を目的としている.本システムによって従来の患者と医療機器間を 有線で結ぶケースに比べ,機器を取り付ける際の煩雑な作業を軽減し,患者にとっても 身体の負担の少ないシステムを構築する事が可能になる.こうした患者の健康情報をモ ニタリングするシステムは様々な技術によって活用が検討されている.
図2-5は複数の生体情報センサと人体通信を用いてネットワークを構築し,健康管理 のためのモニタリングシステム[11] である.本システムは患者の生体情報を取得するた めに人体通信を用いており,小型のセンサを身につける事で日常生活における自分の健 康管理を容易に行う事ができる.計測するデータとしては,心電図,血圧,血中酸素,
脳波を想定しており,これらを計測する各センサは人体を通信路として用いて,ネット ワークを構築する.また,複数のセンサから得られたデータは同じく体に身につけた中 継ハブで一箇所に集められる.そして,収集した各種生体情報は患者自身が自分の健康
図 2-4 タッチボイスシステム
た場合,モバイル端末の GPS を用いて適切な場所へ速やかに救急車を手配したり,近 隣住民に緊急の連絡を行い,早期に処置を行うことも可能になる.
図 2-5 モバイルヘルスケアシステム
2-3 人体認識技術
前節までに人体通信の概要及びアプリケーションを複数紹介し,人体通信が従来の無 線通信技術に置き換わる利便性のある通信技術である事を述べた.本論文で述べる人体 部位識別方式は,既存の無線通信技術に置き換わる技術では無く,人体の動き,人体の 部位を識別するために通信を用いる事を目的としている.本論文で述べる人体部位識別 方式以外で人体の動きを認識する技術としては,カメラを用いた画像認識を利用したシ ステムが多く,代表例として図2-6に示す体感型ゲームとして活用されているMicro Soft
社のKinect[12]がある.また,現実世界のどこにいてもデジタルな情報を扱えるMITの
Sixth Sense[13]では,人体に小型カメラと小型プロジェクタ,各指にセンサを装着し,
人の行動や人体部位をインタフェースとしたアプリケーションが複数提案されている.
Six Senseのアプリケーション例として図2-7にジェスチャーから写真撮影,掌上を電話
の入力インタフェースとして利用する使用例を示す.さらに,カメラといった画像認識 技術を使用せず,人体の部位を識別する方式として,人体の指に加速度センサを装着し,
指の動きとセンサの状態から指の動き,状態を識別する技術の検討もされている [14][15].本論文ではカメラや加速度センサを利用するのではなく,人体に装着するプ ローブと外部のプローブとの電磁波の送受信から手首の動き,指の識別,掌上の識別を 評価している.そこで,本節では人体の部位識別技術に用いるプローブの基礎特性と人 体と空間の伝搬特性及びノイズによる影響を実験により評価する.また,本論文のシミ ュレーション評価で用いるFDTD法の概要について述べる.
2-3-1 プローブの基礎特性
本論文の実験では人体に装着するプローブを表2-2の性能を持つネットワークアナラ イザの送信,受信ポートに接続し,評価している.従って,プローブの基礎特性はネッ トワークアナライザの送信,受信ポートに接続し,評価する.
図2-8はプローブの構成図及び実験の構成例を示しており,プローブは直径1 cmの 円形銅板を信号電極,信号電極から2 cm離れたゴム板(5 cm × 5 cm) に接着させた基 準電極で構成されている.また,信号電極とゴム板の間には発泡スチロールを敷き,基 準電極には低周波及び高周波(10 MHz~3.0 GHz)の電磁シールドをしている. また,
本論文でのプローブの使用方法として,人体に装着するプローブとして扱う場合は,被 験者からみて手首の上面,下面,右側面,左側面(図2-9)を装着箇所とし,プローブ の円形銅板を人体皮膚に接触させている.また,人体に装着しない外部プローブとして 扱う場合は,プローブを机等に固定し,円形銅板に触れて使用している.人体に装着す るプローブ,装着しないプローブ共にネットワークアナライザに接続し,実験を行う.
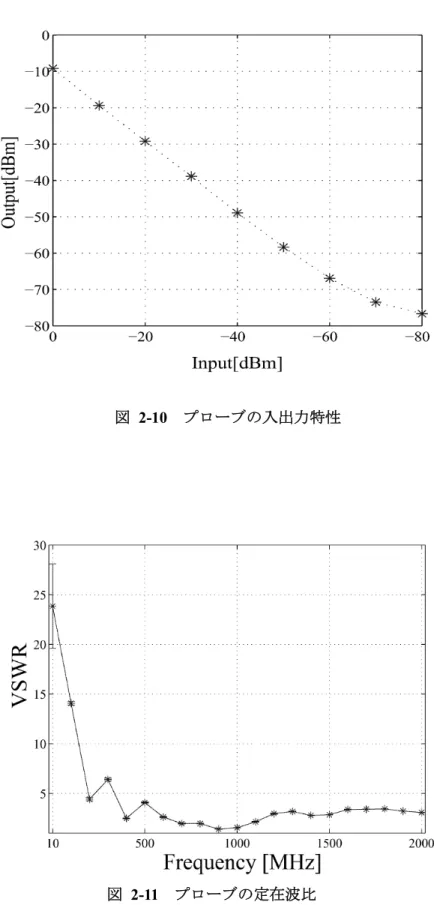
次に,本プローブの周波数1.5 GHzにおける信号の入出力特性を図2-10に示す.本 図から送信電力が‐40 dBmになるまで,受信電力は送信電力に比例し低下している事 が分かる.さらに,1.5 GHz以外の周波数(100 MHz~3.0 GHz)においても同様に‐40dBm までは受信電力は送信電力に比例する傾向を確認した.さらに,図 2-11 はプローブを 手首上面に装着した状態で周波数100 MHz~3.0 GHzにおける100 MHz毎に50回計測
図 2-7 Six Senseのアプリケーション例
5cm
Network Analyzer 5cm 1cm
以下に比べ低い事を確認した.以上の結果から本論文では標準偏差が 0.5 以下であり VSWRが5以下である周波数500 MHz以上及び送信電力‐40 dBm以上を識別に有効な 周波数として定義し,実験及び数値解析シミュレーションに用いる.
図 2-8 プローブ構成図及び実験構成図
図 2-10 プローブの入出力特性
図 2-11 プローブの定在波比
2-3-2 人体及び空間の伝搬特性
本項では人体と空間の伝搬特性の比較評価をするため,手首の左側面に受信機として 扱うプローブを装着し,送信電力が‐20dBm の机に固定したボタン型プローブの円形 銅板に触れ,体を伝搬路とした受信結果とボタンに触れずに同距離の空間を伝搬路とし た受信結果を比較し,人体伝搬特性を評価する.
図 2-12 は人差指で触れたボタン型プローブから手首に装着した受信機までの伝搬特 性と同環境における空間の伝搬特性及びノイズを示している.この結果から,本実験環 境では周波数3.0 GHzまでは空間より人体が伝搬に支配的であり,測定周波数に対して も十分な信号強度が確保されている事を確認した.
表 2-2 ネットワークアナライザのスペック
2-3-3 FDTD 法を用いた電磁解析シミュレーション
人体をモデル化した電磁界解析において FDTD 法は頻繁に用いられており,本論文 でも実験に加え,FDTD法を用いた評価を行っている.FDTD法の解析対象は伝搬特性 やSAR等多種多様であり[16]-[18],本論文の実験では電界強度及び定在波比を計算によ り求めている.
FDTD法はMaxwell方程式において時間微分を離散化し,電場及び磁場をタイムステ
ップ数に合わせて交互に計算する手法である.以下に基礎式として用いるMaxwell方程 式を示す.
t t r t B
r
E
( , )
) ,
( ・・・(2.1)
) , ) ( , ) (
,
( J r t
t t r t D
r
H
・・・(2.2)
) , ( ) ,
(r t r t
D
・・・(2.3)
0 ) ,
(
B r t ・・・(2.4)
図 2-12 人体と空間における伝搬特性とノイズ
ここで,
,
,
を透磁率,誘電率,導電率とすると,構成方程式B
H ,D
E, EJ
を用いて(2.1)及び(2.2)を下記の電界,磁界形式に変換する.・・・(2.5)
そして,YEEアルゴリズムを用いて,電界
E
Z及び磁界Hを定式化すると下記の式にな る.・・・(2.6)
・・・(2.7)
・・・(2.8)
・・・(2.9)
k z j i t k
j i CHXLZ
1
2 , 1 2 , 1 2)
, 1 2 , 1
(
k y j i
t k
j k i
j i t k
j i C
EZLY
1
2 ) , 1 , ( 2
2 ) , 1 , 1 ( 2 )
, 1 , ( 2 )
, 1 , (
σ
k x j i
t k
j i k
j i t k
j i C
EZLX
1
2 ) , 1 , ( 2
2 ) , 1 , ( 1 2 )
, 1 , ( 2 )
, 1 ,
( σ
2 ) , 1 , ( 2
2 ) , 1 , ( 1 2 )
, 1 , ( 2
2 ) , 1 , ( 1 2 ) , 1 , (
k j i
t k
j i k
j i
t k
j i k
j i C
EZ
σ σ
2 )}
, 1 2 , 1 ( 2 )
, 1 2 , 1 ( 2 ){
, 1 , (
2 )}
, 1 2 , ( 1 2 )
, 1 2 , ( 1 2 ){
, 1 , (
2 ) , 1 , ( 2 )
, 1 , ( 2 )
, 1 , (
2 1 2
1
2 1 2
1
1
k j i H k
j i H k
j i C
k j i H k
j i H k
j i C
k j i E
k j i C k
j i E
n y n
y EZLY
n y n
y EZLX
n Z EZ
n Z
・・・(2.10)
他の成分である電界のxy成分及び磁界のyz成分も同様に導く事が出来る.以上の式 から,特定の時間ステップ
n
における磁場H は,その半ステップ前での電場Enと 1 ステップ前の磁場から求めることができ,時間ステップがn1nでの電場En1は,半 ステップ前の磁場 Hと1 ステップ前の電場Enから求めることができる.初期値につ いては,Enから計算されるので,アンテナの根元にEnだけを与える.また,アンテ ナの給電電圧は下記の式で計算する.) ( )
, (
2 1
t Z F
t V r E
k t t
Z
・・・(2.11)
) (t
F は時間波形を表しており,本論文では正弦波を用いているためF(t)は下記になる.
) cos(
)
(t
t
Fまた,計算結果の正確さを保つため,空間の増分値x,y,z波長λ に比べて十分 の1以下に設定し,時間ステップtは下記のCourant の安定化条件[17] を満たす値に設 定する.
・・・(2.12)
以上がFDTD法の基礎概念であり,人体の筋肉組織における誘電率及び導電率,吸収 境界条件等を元に人体及びプローブをモデル化し,計算する.
)}
2, , 1 ( ) 1 2, , 1 ( 2){
, 1 2 , 1 (
2)}
, 1 , ( 2)
, 1 1 , ( 2){
, 1 2 , 1 (
2) , 1 2 , 1 ( )
2, , 1
( 2
1 2
1
k j i E k
j i E k
j i C
k j i E k
j i E k
j i C
k j i H k j i H
n y n
y HXLZ
n Z n
Z HXLY
n X n
X
2 2
2
1 1
1
1
z y
x
t
2-4 むすび
本章では人体通信の概要,人体通信を利用したアプリケーションとして,IBC誘導シ ステム,タッチボイスシステム,モバイルヘルスケアシステムの3種について述べた.
さらに,本論文の実験で用いるプローブの基礎特性の評価として,人体にプローブを接 着した状態における周波数とVSWR の関係,信号の入出力特性,人体及び空間の伝搬 特性を求めた.本結果から,周波数500 MHz以上及び送信電力‐40 dBm以上が有効な パラメータである事,3.0 GHzまでは空間より人体が伝搬に支配的である事を明らかに した.
第3章 手首の動き識別方式
本章では人体通信を用いて人体の手首の動きを識別する手首の動き識別方式[19] に ついて述べる.最初に手首の動き識別方式で使用する人体手部のモデル化を行い,FDTD 法を用いた数値計算を行う.また,数値計算と同様の実験を行い,手首の動き識別方式 の妥当性を示す.次に,手首の動き識別方式として,プローブを装着した被験者の定在 波比を計測し,手首の縦方向及び横方向の動きを識別し,手首の動き識別方式が実現可 能である事を示す.さらに,手首の動き識別技術の応用として,手部の形状識別方式に ついて述べ,実現例として,ジャンケンの識別を行い評価する.評価結果から,手首の 動き及び形状識別方式が実現可能であることを示す.
3-1 手首の動き識別方式概要
提案する手首の動き識別方式は手首の傾きを識別することを目的としており,携帯電 話等の小型端末を持った手首の動きに合わせた機械操作,手の形状認識,空間上での文 字の記述(図3-1)等の新しいヒューマンマシンインタフェースで活用が期待できる.
図 3-1 手首の動き識別方式を利用した空間文字記述システム
3-2 手首の動き評価モデル
手首の動き識別方式の実験では図2-8のプローブとネットワークアナライザを利用し,
識別に最適な手首の装着箇所を評価する.評価対象としては,図2-9の上面,下面,右 側面,左側面の計4箇所を評価対象としている.
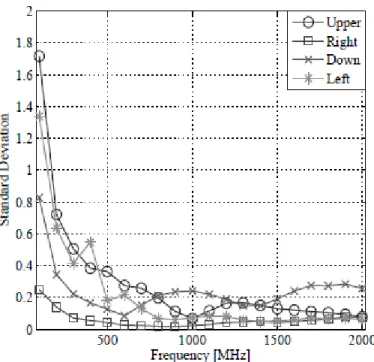
図3-2は手の甲と手首を水平に伸ばした状態での各装着箇所におけるVSWRである.
このVSWRは試行回数50回における平均値を示しており,図3-3は標準偏差を示して いる.本結果から各装着箇所の値は同一でない事が明らかであり,手首の動き識別にお いて装着箇所による違いが生じる可能性がある事を確認した.
図 3-2 各装着状態におけるVSWR
3-2-1 FDTD 法を用いた手首の動き評価モデル
本節では手首の動き識別方式における評価として,FDTD法を用いた電磁解析シミュ レーション及び同様の実験を行い,手首の動き識別方式が実現可能であることを述べる.
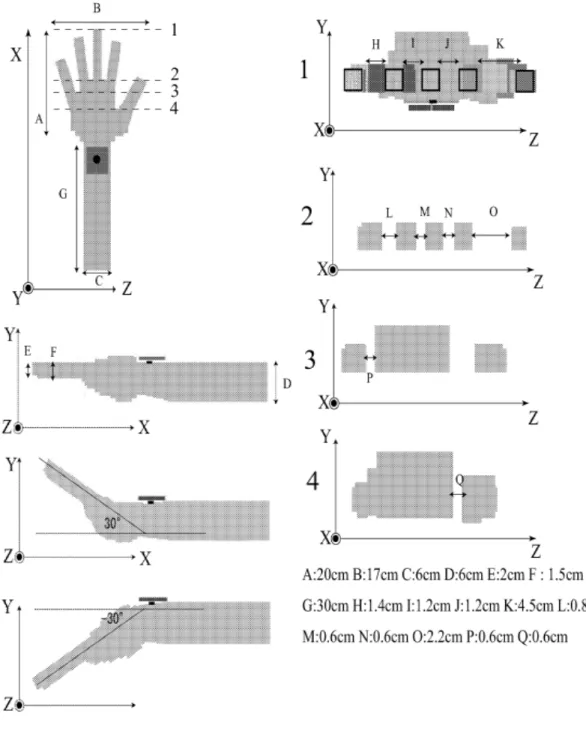
図3-4は電磁解析シミュレーションに用いた簡易人体手部モデルを示しており,本手 部モデルは筆者の手の情報及び図3-5の手首を+30°,‐30度に傾けた状態の写真を元に 構築している.また,全体の大きさ,指間の長さ等の詳細は図3-4中に示している.
次に,人体に装着するプローブは図2-8と同サイズでモデル化しており,アンテナ部 は直径1cmの円形金属板となっている.この円形の中心部に正弦波電圧のピークが1V の給電点を設け,手首の上面にプローブを装着し,計算する. 解析には周波数500 MHz
から2.0 GHzまでを100 MHz刻みで使用しており,解析領域の空間離散間隔Δx,Δy,
Δzは使用する周波数の最短波長の1/10以下である0.2 cmとし,47.0 cm × 25.2 cm × 28.8 cmを全領域とした.また,時間離散間隔はCourantの安定条件よりΔt = 3.0 psとし,吸 収境界条件には6層のPML(Perfectly Matched Layer)[18]を適用,筋肉組織における誘
図 3-3 各装着状態におけるVSWR の標準偏差
態を0°とし,掌から指先を+30°傾けたモデルと手首を-30°傾けたモデルにおける給電点 のVSWRを下記の計算で求めた.
給電点での電圧,電流を
V
in ,I
inとすると,入力インピーダンスと入力アドミッタン スは次式で与えられる.in in in in
in
I
jX V R
Z
・・・(3.1)in in in
in G jB Z
Y 1 ・・・(3.2)
給電線の特性インピーダンスを
Z
0[]とすると,反射係数は次式になる.0 0
Z Z
Z Z
in in
・・・(3.3)従ってVSWRは次式で計算される.
1
VSWR 1
・・(3.4)図 3-4 モデル化を行った人体手部
3-2-2 手首の動き実験評価モデル
手首の動き識別方式の電磁解析モデルに用いた人体手部モデルは手首上面にプロー ブを装着した状態における縦方向の VSWR を求めている.そこで,同様の評価を行う ため,手首上面にプローブを装着し,実験を行う.実験パラメータは表3-1の通りであ り,手首に装着するプローブは手首を動かしても,円形銅板が手首から離れない位置に リストバンドで固定する.そして,図2-8のプローブ,手首,指先が水平になった状態 である0°,図3-5の手首を縦方向に‐30°,+30°傾けた状態におけるVSWRをそれぞれ 計測する.
図 3-5 縦方向における手首の動き識別
3-2-3 手首の動き識別方式シミュレーション及び実験結果
図3-6にVSWRのシミュレーション及び実験結果,図3-7にそれぞれの‐30°と+30°
の差を示す.本結果から,シミュレーション結果は900 MHzまで,実験結果は800 MHz まで+30°のVSWRが‐30°を上回っているが,シミュレーション結果は1.0 GHz以上,
実験結果は900 MHz以上においては-30°のVSWRが0°,+30°を上回る事を明らかにし た.また,シミュレーション結果と実験結果との完全一致はしていないが,この原因と して,シミュレーションにおいては実験環境の再現不足,実験においてはプローブの装 着箇所のズレやノイズ等が考えられる.しかし,図 3-7 に示すように‐30°と+30°の VSWR差は類似傾向にあり,両結果共に+30°と‐30°のVSWRが異なる事から手首の動 き識別が実現可能であると言える.
図 3-6 人体手部におけるVSWR シミュレーション及び実験結果
3-3 手首の動き識別方式の評価モデル
本節では,前節で評価を行った手首上面以外の下面,左右両側面にプローブを装着し,
実験を行って,最適な装着箇所を評価する.本研究における最適な装着箇所は最も低い VSWRを得た装着箇所ではなく,手首を動かすことで最も変動するVSWRを得る装着 箇所である.対象とする手首の動きとして,手首を上下に縦方向,左右に横方向動かし,
それぞれの動きにおいて最適な装着箇所を求める.縦方向の動きは前節の通り手首を‐
30°,0°,+30°傾けた状態でのVSWRを計測し,‐30°と+30°との差を求める.横方向の 動きもプローブの中心を基準に手首を‐30°,0°,+30°傾けた状態でのVSWRを計測し,
‐30°と+30°との差を求める.
3-3-1 最適な装着箇所の評価結果
図 3-7 人体手部におけるシミュレーション及び実験結果のVSWR 差
まで+30°の VSWR が‐30°の VSWR より上回るが,それ以上の周波数では,‐30°の VSWRが+30°のVSWRに比べ上回る事を示している.
従って,VSWR差が0に近い値となる周波数以外において,手首上面及び下面に装着 したVSWR差は手首両側面に装着箇所したVSWR差より,差が大きく,縦方向の識別 に効果的である事を明らかにした.
同様に図3-9は試行回数50回における各装着箇所の横方向に‐30°と+30°傾けた状態 におけるVSWR差の平均値を示している.ここで,手首両側面における周波数1.0 GHz から1.2 GHzにおいて,‐30°及び+30°のVSWR差が0に近づく事が分かる.従って,
VSWR差が0に近い値となる周波数以外において,手首両側面に装着したVSWR差は 手首上面及び下面に装着箇所したVSWR 差より,差が大きく,横方向の識別に効果的 である事を明らかにした.
図 3-8 手首縦方向の実験結果
3-4 マハラノビスの距離を用いた評価概要
本節では前節で行った実験に対し,数値的評価を行うためにマハラノビスの距離を用 いた判別分析[21] で識別率を求め,各モデルを評価する.マハラノビスの距離を D と し,グループの平均をα,グループの標準偏差をβとすると変数xにおけるDは
・・・(3.5)
で表される.同様に,各グループとの確率的な距離を求め,最も距離が短いグループに 変数 X は判別される.そして,全ての変数に対して判別分析を行い,正しく判別され た割合を識別率とし,評価を行う.
図 3-9 手首横方向の実験結果
3-5 手首の動き識別方式の識別結果
本論文では,最初に識別に妥当なサンプル数を評価するため,手首上面にプローブを 装着した状態で,縦方向の動きである手首を縦方向に+30°,0°,‐30° 傾けた状態にお けるVSWRを125 回計測し,サンプル数と識別率の関係性を求める.評価方法として,
サンプル数を 5 つ追加する毎に識別率を求め,識別率の推移から評価を行う.図 3-10 は周波数500 MHz,1.0 GHz,1.5 GHz,2.0 GHzにおけるサンプル数と識別率の関係を 示している.本結果から,125 個のサンプル数において80 %を超える識別率に関して は50 個のサンプル数における識別率と比べ増減が5 %以内である事が分かった.従っ て,50 個のサンプル数において,識別率が80% 以上を得た周波数に関しては,安定性 があり,識別に効果的であると言える.
図 3-10 参照サンプル数と識別率の推移
図3-11 は実験回数 50 回における各装着箇所の縦方向の識別率を示しており,図 3-12 は横方向の識別率を示している.本結果から,前節で VSWR の差が大きかった縦方向 では上下面にプローブを装着した場合,横方向では手首両側面にプローブを装着した場 合の識別率が高くなることを明らかにした.また,縦方向及び横方向共に周波数1.0 GHz
~1.2 GHz においては手首上下共に識別率が著しく低下した.これは,図 3-8,図 3-9 から縦方向及び横方向の+30°と‐30°のVSWR差が周波数1.0 GHz~1.2 GHz周辺で0に 近く,+30°と‐30°の識別が困難であった事が原因として考えられる.しかし,その他 の周波数では,80%を超える周波数も複数存在する事から,特定の周波数を用いる事で 手首の動きを識別する事は可能である.
図 3-11 手首縦方向の動き識別結果
続いて,手の大きさが異なる被験者において縦方向及び横方向の実験を行い,識別率 を求めた.実験では3人の被験者それぞれ 50回ずつ計測を行い,評価した.表 3-2は 各被験者の手の情報を示しており,手首縦方向の動きでは手首上面,手首横方向の動き では手首右側面を用いて実験を行った.図3-13は縦方向の識別結果,図3-14は横方向 の識別結果を示している.本結果から,各被験者によって最も高い識別率,最も低い識 別率の周波数は異なったが,全ての被験者において縦,横方向の動きで共に80 %を超 える識別率を得た.従って,複数の被験者においても最適な装着箇所は有効であり,手 首の動きを識別できる事を示した.また,各被験者における識別率に差が見られた大き な要因として,手の大きさ,プローブの装着位置の違いが考えられる.しかし,全ての 被験者に共通して,周波数900 MHz~1.2 GHzにおいて最も低い識別率を計測しており,
これらの周波数以外を用いる事で,効果的に識別が可能であると言える.最後に同様の 実験を右手首においても実施した所,左手首と同様に手首上下の動きでは手首の上下面 が有効であり,左右の動きでは手首の左右両側面が有効である事を確認した.
図 3-12 手首横方向の動き識別結果
表 3-2 複数の被験者における手の情報
図 3-13 複数人における手首縦方向の動き識別結果
3-6 手の形状識別
本章では手首の動き識別の応用として,手の形状識別の実験を行い,評価する.
3-6-1 ジャンケン識別評価モデル
本論文では手の形状識別の実例として,ジャンケンの識別を行う.図 3-15 は手首上 面にプローブを装着した人体手部におけるグー,チョキ,パーの状態を示している.本 図から,グー,チョキ,パー時における手首と甲の傾きが異なる事が分かる.そこで,
実験では甲の角度に着目し,縦方向の識別で効果的であった手首上面を用いて,プロー ブを装着した状態におけるグー,チョキ,パー時のVSWRを50回ずつ計測し,評価す る.実験に用いたパラメータは表3-1の通りであり,前章で実験を行った複数の被験者 にける識別率をそれぞれ求める.
3-6-2 ジャンケン識別評価結果
図3-16は複数の被験者におけるグー,チョキ,パーの識別率の平均値を示している.
本結果から,手首の動き識別と同様,各被験者によって最も高い識別率,最も低い識別 率は存在し,その周波数も異なる事を明らかにした.しかし,手首縦方向及び横方向の 動きと同様に80 %以上の識別率を得る周波数が存在し,実現が可能である事を明らか にした.
図 3-16 ジャンケンの識別結果
3-7 むすび
本章では,人体の手首の動きを識別する手首の動き識別方式について評価した.検討 方法として,手首の上面に装着したプローブした状態で手首を縦方向に‐30°,0°,+30°
傾けた時のVSWRを実験及び FDTD法を用いたシミュレーションから評価した.評価 結果から実験結果とシミュレーション結果は完全な一致はしなかったが,周波数が 1.0 GHz以上における手首を‐30°傾けた状態のVSWRが,手首を0°,+30°傾けた状態を上 回る事を明らかにし,両結果共に+30°と‐30°のVSWRが異なる事から手首の動き識別 が可能である事を明らかにした.また,手首に装着するプローブの位置を手首上面,下 面,手首両側面に変えた場合と縦方向及び横方向に手首を+30°,0°,‐30°傾けた状態 における実験を行い,マハラノビスノ距離を用いて算出した識別率の観点から評価を行 った.評価結果から手首縦方向の識別では手首上面及び下面にプローブを装着したモデ ルの識別率が80 %を越え,手首の両側面にプローブを装着したモデルに比べ,識別に 効果的である事を明らかにした.また,手首横方向の識別では手首の両側面にプローブ を装着したモデルの識別率が80 %を超え,手首上面及び下面にプローブを装着したモ デルより識別に効果的である事を示した.さらに,手首の動き識別方式を用いた応用技 術として手の形状の識別ではジャンケンで使用されるグー,チョキ,パーを評価した.
結論として,手首上面にプローブを装着することで識別率が80 %以上となり,手首縦 方向及び横方向の動きと同様に実現が可能である事を確認した.
第4章 指識別方式
本章では最初に,人体の指識別を目的とした指識別方式(Finger Identification Scheme:
FIS) [22]-[24]の概要を述べる.次に,FDTD 法を用いた電磁解析シミュレーションを
行い,指識別方式の妥当性を示す.そして,受信電力,位相,到達時間等の識別に用い るデータを測定し,実際に指の識別を行う.さらに,指識別方式を用いたアプリケーシ ョンとして,携帯端末上での指の識別を目的としたEnhanced Key Input Scheme(EKIS)
の提案及び基礎特性を評価する.
4-1 指識別方式概要
指識別方式(図4-1)を実社会に用いると様々なサービスや福祉システムが考えられ る.例えば,複数のボタンを使い分けるシステムでは,ボタンの代わりに指を用いる事 で機器のユーザインターフェースを単純化する事ができる.また,人体に装着する端末 に複数の情報を入力しておき,各指と複数の情報を関連付ける事で,ユーザの意思によ って必要な情報だけを入出力する事が可能になる.従って,両手の指を用いると10通 りの異なった情報の入出力が可能になり,例えば,数字の0-9を各指にあてはめれば,
数字入力の簡易化が可能になる.逆にユーザが複数の情報を入手するときに,触れた指 によって情報を識別して保存することも可能である.さらに,複数の指でボタン型の端 末に触れた場合には,一本の指の識別と異なる情報とする事で10通り以上の情報の入 出力が可能である.この複数の指の組み合わせ技術を利用することで,情報の数は膨大 な量となる.
図4-2は指識別方式による電子手話システムである.同システムでは,指と文字を関 連付ける事で,ボタン型の端末に触れた際に指を識別して指に入力してある文字を出力 するというシステムある.実際に使うイメージとして,ユーザの体にスピーカー付の通
また,日常生活での指識別方式の活用例を考えると,複数のボタンがある装置への適 応が望ましい.図4-3では指識別方式を適用したピアノとキーボードであり,キーを通 信端末となっている.これはピアノの側にユーザの指情報を入れておき,通信端末であ るピアノの鍵盤と指が触れることで通信が始まり,ピアノにあらかじめ登録してある演 奏曲の指の情報と実際に触れたキーの指とを照らし合わせ,正しい指で押さえているか 判断する事が可能である.
さらに,バイオメトリクス認証技術に関しても指識別方式の応用が可能であると考え られる.現在の人体の指を識別する代表的な技術として,指紋認証,静脈認証,カメラ を使った映像による認証などを挙げることができる.これらの技術は,ユーザが特定の デバイスを身につける必要はないが,それぞれ問題がある.指紋認証においては年齢と ともに指紋が変化したり,薄くなったりする場合がある.また,静脈認証やカメラを使 って映像による認証は認証するための装置を設置するのに多額の費用がかかり,安易に アプリケーションに組み込むことが困難である.しかし,指識別方式を用いた場合,通 信端末を人体に装着する事で,簡単かつ安価にアプリケーションに組み込ませることが できる.
図 4-1 指識別方式
4-2 指識別モデル
本節では指識別方式実現のために,二つのモデルを提案する.第一のモデルは,右即 端受信機(Right Receiver:RRx)と左即端受信機(Left Receiver:LRx)を持つリストバン ド型端末とシステムが提供するボタン型端末で構成されている.なお,右即端及び左即 端は装着者から見て手首の左側面と右側面を意味し,システムが提供するボタン型端末 は送信機になり,リストバンド型の端末を装着したユーザがボタン型端末に触れる事で,
信号の受信を行い,指の識別を行う.本論文では,図4-4に示す第一のモデルを両側端 図 4-2 指識別方式を用いた電子手話システム
図 4-3 指識別アプリケーション
♪
♪
Transmitter:LTx)から送信された信号をボタン型端末が受信し,指の識別を行う.本論 文では,このモデル2を両側端送信(Two Transmitters:2Tx)モデルと名付ける.
図 4-4 両側端受信モデル
図 4-5 両側端送信モデル