学位論文
監視データを用いた航空交通の分析
九州大学大学院 工学府 航空宇宙工学専攻
小塚 智之
2017 年
概要
本研究の主題は,航空交通システムから得られた監視データの活用方法を提案し,実 際のデータに基づいた分析結果によって航空交通システムの現状把握,課題抽出および 解決策について研究することである.その成果は,航空交通量の増大によって航空交通 システムに起こりうる影響を予測し,より効率を向上させる研究に有益なデータを提供 することができる.
これらを主題とするに至った動機は,わが国において航空交通システムから膨大な量 のビックデータが得られているにもかかわらず,それらがほとんど活用されていないか らである.航空機の機体システムは,それらの研究結果から得られたデータを詳細に解 析し,より良いシステムを開発することでいくつかの飛躍的な発展を遂げてきている.
具体的には,飛行管理装置や自動操縦の導入,グラスコックピットによる情報の表示な どである.しかし,航空交通システムは,いまだ航空管制官の努力と技量に頼ったシス テムである.航空交通量の継続的な増加により,現在の人間の能力に依存したシステム のままでは運用が破綻しかねない,もしくは,著しく効率を低下させる状況の発生が予 測される.
こういった背景をふまえて,本研究では CARATS Open Data と呼ばれる最近に公開さ れた航空機監視データを用いて航空交通システムの現状を分析し,今後の航空交通管理 システム発展のための初歩的な検討を行なう.具体的には,航空機同士の干渉問題,空 域の構成問題,上空通過機の問題である.これらは,日本国内でこれまであまり扱われ てこなかったテーマである.議論が行われてこなかったにもかかわらず,いずれも航空 交通量の増加の影響を受けやすいテーマであり,ビックデータ解析による現状分析によ って早急に研究を進めていく必要がある.
本研究で得られた結果は,航空交通システムのデータを解析することで,現状の運用
からシステムを発展させるための知見が得られることを示している.本検討はまだ入口
の段階であるが,ビックデータの解析方法を開発し,データから得られる課題点を理解
してデータに基づいたシミュレーションを行なうことが有益であることを,解析結果と
ともに主張して学位論文とする.
目次
第 1 章 序論 ... 1
1.1 背景 ... 1
1.1.1 航空交通システムの役割 ... 1
1.1.2 世界の状況 ... 6
1.1.3 日本の状況 ... 9
1.1.4 現行システムと研究 ... 10
1.1.5 課題点 ... 11
1.1.6 データ環境 ... 12
1.2 研究目的 ... 13
1.2.1 本研究の主題 ... 13
1.2.2 本研究の必要性および動機 ... 13
1.3 分析方法 ... 14
1.3.1 仮説 ... 14
1.3.2 分析の方針 ... 15
1.4 論文構成 ... 15
第 2 章 解析のためのデータ ... 17
2.1 使用データ ... 17
2.1.1 SSR データの概要 ... 17
2.1.2 CARATS Open Data の概要 ... 18
2.2 フィルタ処理 ... 20
第 3 章 干渉評価 ... 24
3.1 過去の研究 ... 24
3.2 干渉の現状分析 ... 25
3.2.1 評価方法 ... 25
3.2.2 干渉評価結果 ... 26
3.3 干渉回避指示推定方法 ... 33
3.3.1 回避指示推定の目的 ... 33
3.3.2 軌道予測 ... 33
3.3.3 回避指示推定アルゴリズム ... 34
3.3.4 関東周辺の解析結果 ... 35
3.3.5 判別分析による解消方法の分類 ... 44
3.3.6 陸域全体の解析結果 ... 47
3.4 干渉評価の結論 ... 52
第 4 章 セクタ解析 ... 54
4.1 現在の空域構成 ... 54
4.1.1 空域の管理 ... 54
4.1.2 関連研究 ... 55
4.2 飛行セクタ判定法 ... 55
4.3 航空管制負荷解析 ... 57
4.3.1 機数ワークロード ... 58
4.3.2 密度ワークロード ... 58
4.3.3 密集ワークロード ... 59
4.3.4 調整ワークロード ... 59
4.3.5 高度変更ワークロード ... 60
4.4 解析結果 ... 60
4.4.1 セクタ解析の結果 ... 60
4.4.2 セクタ再構成の結果 ... 67
4.5 ワークロード定量化の課題 ... 69
4.6 セクタ解析の結論 ... 69
第 5 章 上空通過機および国際線航空機 ... 71
5.1 分析対象の選別 ... 71
5.1.1 フライトの分類 ... 72
5.1.2 国際線のウェイポイント ... 73
5.2 上空通過機の現状分析 ... 77
5.3 国際線出発の現状分析 ... 80
5.4 合流点での管制間隔 ... 83
5.5 上空通過機の飛行効率 ... 83
5.5.1 飛行状態推定 ... 83
5.5.2 飛行効率の解析 ... 84
5.6 解析結果の考察 ... 86
第 6 章 まとめ ... 88
6.1 本研究の成果 ... 88
6.2 今後の課題 ... 90
Appendix A 航空交通に関する諸規則 ... 92
Appendix B ADS-B データの活用 ... 99
Appendix C 方位角の導出 ... 103
Appendix D 航空機性能モデル ... 107
あとがき
参考文献
謝辞
省略形および頭字語
ACARS Automatic Communications Addressing and Reporting System ACC Area Control Center
ADS-B Automatic Dependent Surveillance- Broadcast AMAN Arrival MANager
ARSR Air Route Surveillance Radar
ASAS Airborne Separation Assurance System ATC Air Traffic Control
ATFM Air Traffic Flow Management ATM Air Traffic Management
CADIN Common Aeronautical Data Interchange Network
CARATS Collaborative Actions for Renovation of Air Traffic Systems CAS Calibrated Air Speed
CFDT Calculated Fix Departure Time
CPDLC Controller Pilot Data Link Communication CTAS Center TRACON Automation System
DP Dynamic Programming
EDCT Expected Departure Clearance Time ENRI Electronic Navigation Research Institute FAA Federal Aviation Administration
FIR Flight Information Region FMS Flight Management System
GBAS Ground-Based Augmentation System GNSS Global Navigation Satellite System
ICAO International Civil Aviation Organization ILS Instrumental Landing System
JAXA Japan Aerospace eXploration Agency MLS Microwave Landing System
NextGen Next Generation air transportation system
OTR Oceanic Transition route
QAR Quick Access Recorder
RDP Radar Data Processing system
SESAR Single European Sky ATM Research
SSR Secondary Surveillance Radar
TAS True Air Speed
TMA Traffic Management Advisor TRACON Terminal Radar Approach Control Facilities VOR VHF Omni-directional radio Range
WAM Wide Area Multilateration
図目次
図 1.1 運用の現場,関連組織および研究開発の一例 ... 2
図 1.2 航空管制官等の定員と運航機数の推移 ... 3
図 1.3 航空路管制機関取扱い延べ機数 ... 3
図 1.4 通信の概念図 ... 4
図 1.5 誘導・航法の概念図 ... 5
図 1.6 監視の概念図 ... 5
図 1.7 NextGen の将来計画 ... 7
図 1.8 データ通信による運用の変化 ... 7
図 1.9 SESAR がもたらす便益 ... 8
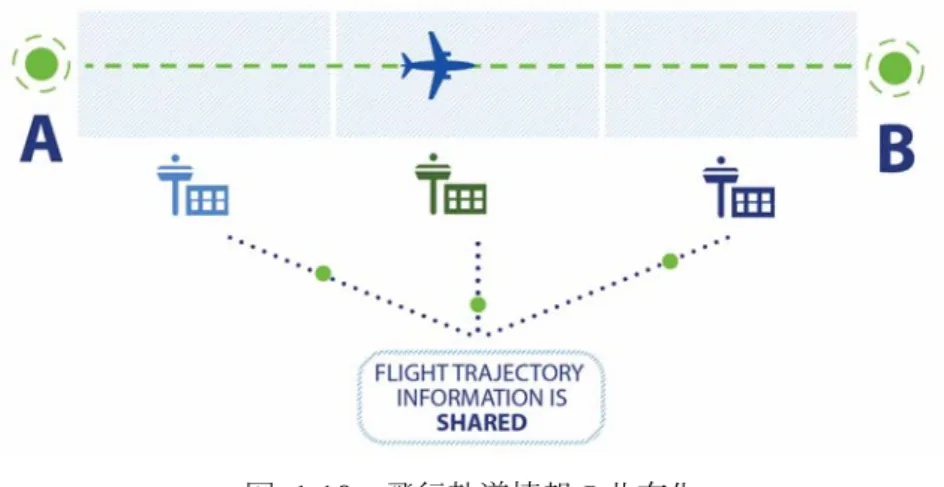
図 1.10 飛行軌道情報の共有化 ... 8
図 2.1 SSR データの全飛行軌跡 ... 18
図 2.2 CARTAS Open Data の誤差(東京→福岡の 2 便) ... 20
図 2.3 CARTAS Open Data の誤差(福岡→東京の 4 便) ... 20
図 2.4 連続する 3 点の位置情報 ... 21
図 3.1 保護空域 ... 26
図 3.2 干渉評価結果( 2012.5.7 ) ... 27
図 3.3 干渉評価結果( 2012.5.8 ) ... 27
図 3.4 干渉評価結果( 2012.5.9 ) ... 27
図 3.5 干渉評価結果( 2012.5.10 ) ... 28
図 3.6 干渉評価結果( 2012.5.11 ) ... 28
図 3.7 干渉評価結果( 2012.5.12 ) ... 28
図 3.8 干渉評価結果( 2012.5.13 ) ... 28
図 3.9 干渉評価結果( 2012.7.9 ) ... 29
図 3.10 干渉評価結果( 2012.7.10 ) ... 29
図 3.11 干渉評価結果( 2012.7.11 ) ... 29
図 3.12 干渉評価結果( 2012.7.12 ) ... 29
図 3.13 干渉評価結果( 2012.7.13 ) ... 30
図 3.14 干渉評価結果( 2012.7.14 ) ... 30
図 3.15 干渉評価結果( 2012.7.15 ) ... 30
図 3.16 干渉評価結果( 2012.9.3 ) ... 30
図 3.17 干渉評価結果( 2012.9.4 ) ... 31
図 3.18 干渉評価結果( 2012.9.5 ) ... 31
図 3.19 干渉評価結果( 2012.9.6 ) ... 31
図 3.20 干渉評価結果( 2012.9.7 ) ... 31
図 3.21 干渉評価結果( 2012.9.8 ) ... 32
図 3.22 干渉評価結果( 2012.9.9 ) ... 32
図 3.23 干渉評価結果( 42 日分) ... 32
図 3.24 ある時刻における航空機の 180 [ s ] 後の予測位置 (関東地方周辺) ... 35
図 3.25 干渉回避指示推定結果 パターンⅠ -1 :飛行経路 ... 37
図 3.26 干渉回避指示推定結果 パターンⅠ -1 :飛行経路(拡大図) ... 37
図 3.27 干渉回避指示推定結果 パターンⅠ -1 :高度変化 ... 38
図 3.28 干渉回避指示推定結果 パターンⅠ -1 :高度変化率 ... 38
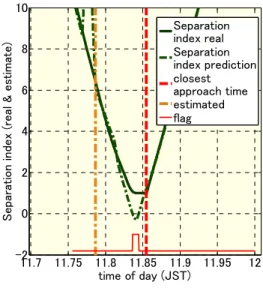
図 3.29 干渉回避指示推定結果 ... 38
図 3.30 干渉回避指示推定結果 パターンⅠ -1 :実・予測間隔指標 ... 38
図 3.31 干渉回避指示推定結果 パターンⅠ -2 :飛行経路 ... 39
図 3.32 干渉回避指示推定結果 パターンⅠ -2 :飛行経路(拡大図) ... 39
図 3.33 干渉回避指示推定結果 パターンⅠ -2 :高度変化 ... 39
図 3.34 干渉回避指示推定結果 パターンⅠ -2 :高度変化率 ... 39
図 3.35 干渉回避指示推定結果 パターンⅠ -2 :較正対気速度 ... 40
図 3.36 干渉回避指示推定結果 パターンⅠ -2 :実・予測間隔指標 ... 40
図 3.37 干渉回避指示推定結果 パターンⅠ -3 :飛行経路 ... 41
図 3.38 干渉回避指示推定結果 パターンⅠ -3 :飛行経路(拡大図) ... 41
図 3.39 干渉回避指示推定結果 パターンⅠ -3 :高度変化 ... 41
図 3.40 干渉回避指示推定結果 パターンⅠ -3 :高度変化率 ... 41
図 3.41 干渉回避指示推定結果 パターンⅠ -3 :較正対気速度 ... 42
図 3.42 干渉回避指示推定結果 パターンⅠ -3 :実・予測間隔指標 ... 42
図 3.43 干渉回避指示推定結果 パターンⅡ -1 :飛行経路 ... 42
図 3.44 干渉回避指示推定結果 パターンⅡ -1 :飛行経路(拡大図) ... 42
図 3.45 干渉回避指示推定結果 パターンⅡ -1 :高度変化 ... 43
図 3.46 干渉回避指示推定結果 パターンⅡ -1 :高度変化率 ... 43
図 3.47 干渉回避指示推定結果 パターンⅡ -1 :較正対気速度 ... 43
図 3.48 干渉回避指示推定結果 パターンⅡ -1 :実・予測間隔指標 ... 43
図 3.49 水平および垂直接近率 ... 46
図 3.50 ある時刻における航空機の 180 [s] 後の予測位置 (各 ACC 内) ... 48
図 3.51 回避指示の発生が推定される場所( 2013.1.7 ) ... 48
図 3.52 パターン 1 :飛行経路 ... 50
図 3.53 パターン 1 :高度 ... 50
図 3.54 パターン 2 :飛行経路 ... 51
図 3.55 パターン 2 :高度 ... 51
図 4.1 福岡 FIR 内の 4 つの ACC ... 61
図 4.2 東京 ACC 周辺 ... 61
図 4.3 各セクタにおける 1 日の合計機数ワークロード( 42 日分) ... 62
図 4.4 T11 Kanto West Sector の平均機数ワークロード( 42 日分) ... 63
図 4.5 各セクタにおける 1 日の平均密度ワークロード( 42 日分) ... 64
図 4.6 機数ワークロードの高いセクタ( 2012 年 5 月 7 日) ... 64
図 4.7 密度ワークロードの高いセクタ( 2012 年 5 月 7 日) ... 65
図 4.8 Kanto West Sector の機数ワークロード( 2012 年 5 月 7 日) ... 66
図 4.9 Kanto West Sector の密度ワークロード( 2012 年 5 月 7 日) ... 66
図 4.10 Kanto West Sector の密集ワークロード( 2012 年 5 月 7 日) ... 66
図 4.11 Kanto West Sector の調整ワークロード( 2012 年 5 月 7 日) ... 67
図 4.12 Kanto West Sector の高度変更ワークロード( 2012 年 5 月 7 日) ... 67
図 4.13 セクタ再構成前の機数ワークロード平均値 ... 68
図 4.14 セクタ再構成後の機数ワークロード平均値 ... 68
図 5.1 1 日の総フライト数 ... 72
図 5.2 フライト種別ごとのフライト数 ... 72
図 5.3 フライト種別ごとの巡航高度( 2012.5.7 ) ... 73
図 5.4 洋上航空交通業務経路とウェイポイント ... 74
図 5.5 出入口ウェイポイントの平均通過機数( 42 日分) ... 75
図 5.6 日本上空を飛行する上空通過機の飛行経路( 2012.5.7 ) ... 78
図 5.7 上空通過機の機種内訳( 2012 年 5 月 7 日 - 2012 年 7 月 15 日) ... 78
図 5.8 解析対象ウェイポイント ... 79
図 5.9 上空通過機飛行経路例 29 : LANAT → 4 : PUTER ( 2012.5.7 ) ... 79
図 5.10 上空通過機飛行経路例 40 : BORDO → 4 : PUTER ( 2012.5.7 ) ... 80
図 5.11 国際線出発機の機種内訳( 2012 年 5 月 7 日 - 2012 年 7 月 15 日) ... 81
図 5.12 国際線出発機経路例 成田国際空港 → 4 : PUTER ( 2012.5.7 ) ... 81
図 5.13 国際線出発機経路例 成田国際空港 → 5 : ADNAP ( 2012.5.7 ) ... 82
図 5.14 国際線出発機経路例 成田国際空港 → 6 : ABVET ( 2012.5.7 ) ... 82
図 5.15 解析対象ウェイポイントにおける管制間隔 ... 83
図 5.16 PUTER における管制間隔 ... 83
図 5.17 飛行状態推定の流れ ... 84
図 5.18 効率解析で比較する飛行経路 ... 85
図 5.19 PUTER 上空通過機の経路と大圏コース ... 85
図 5.20 飛行時間と燃料消費量の差 ( 2012.5.7 : LANAT - PUTER ) ... 86
表目次
表 1.1 CARATS で述べられている課題点 ... 12
表 2.1 SSR データの概要 ... 17
表 2.2 CARATS Open Data ( 2012 年度版)の概要 ... 19
表 2.3 GPS データによる解析対象機 ... 20
表 3.1 干渉評価の解析範囲 ... 27
表 3.2 回避指示推定の結果 ... 35
表 3.3 回避指示の詳細分類 ... 36
表 3.4 回避指示の目的 ... 36
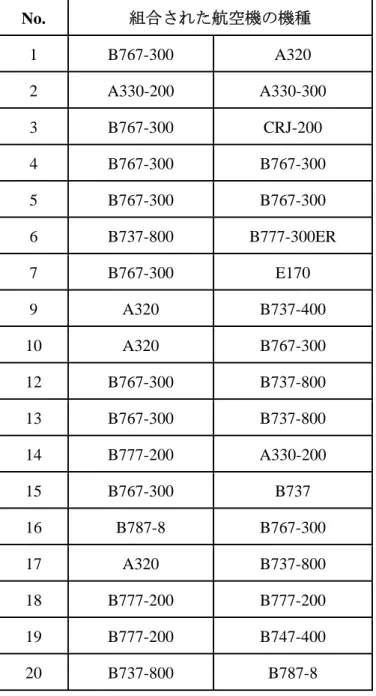
表 3.5 回避指示推定によって抽出された組合せ ... 45
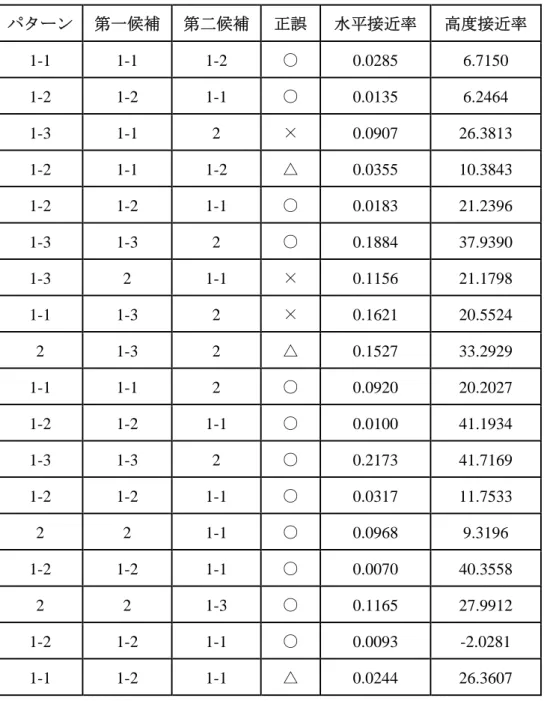
表 3.6 判別分析による回避方法推定の結果 ... 47
表 3.7 回避指示推定のパターン別発生件数 ... 49
表 4.1 機数ワークロードの上位 5 つのセクタ ... 62
表 4.2 密度ワークロードの上位 5 つのセクタ ... 62
表 5.1 出入口ウェイポイントの通過機数( 42 日分) ... 75
第 1 章 序論
序論は,以下の 4 節から構成される.はじめに,本研究の背景について述べる.ここ で,航空交通システムの役割,趨勢および問題点について整理する.次に,本論文の研 究目的である,データを活用して航空交通システムの現状を分析することと,現状分析 結果を踏まえることによっていかにシステムの効率向上に役立つか,について述べる.
加えて,その主題を研究するに至った動機について触れる.その後,本論の分析方法に ついて,研究を進めるために立てた仮説を中心に説明する.最後に,本論文の構成と概 略について述べる.
1.1 背景
1.1.1 航空交通システムの役割
本節では,航空交通管理が実施する事項を整理し,その特徴である“多くの航空機を 同時に扱うこと”について述べる.続いて,近年の航空交通量の増加状況について示し,
航空交通管理の改良の必要性を述べる.
航空会社が 1 機の定期旅客便を飛行させるためには,数多くの機関,施設,専門職等 が有機的に結びつき,協力することで運用が行なわれている.その中で航空交通管理は,
航空交通に関するシステム全体において,航空機を安全かつ効率的に運用するための支
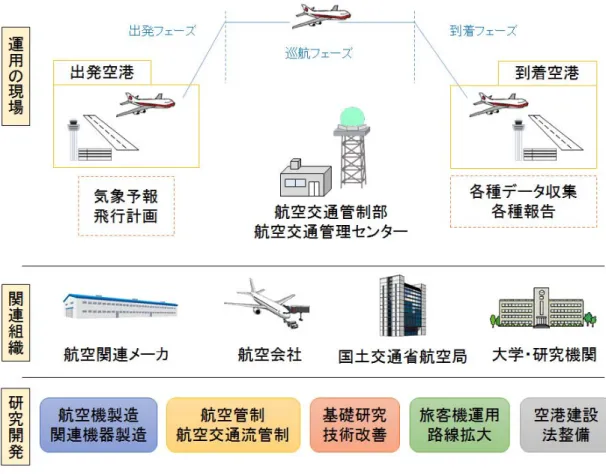
援全般を行なう分野であると言うことができる.図 1.1 に,ある航空機が出発空港から
到着空港まで飛行する運用部分と,それらに関連する組織および研究開発についての概
念図を示す.“運用の現場”として示している部分が,航空交通管理が適用されている
フィールドである.
図 1.1
運用の現場,関連組織および研究開発の一例
航空交通管理システムは,航空交通管理に関わる航空管制,航空交通流管理,空域管 理および管制情報処理などの技術が,有機的につながり一つのまとまりとして運用され ているもの全体のことと定義する.現在の航空交通管理システムにおいて航空管制官は,
出発空港から到着空港までの全フェーズにおいて,多数の航空機の運航の安全性と効率 性を確保するための支援を行なっている.航空管制官が行なう業務の分類の詳細を,
Appendix A に示す.図 1.1 によると,出発空港において,気象予報および飛行計画を
収集する.出発した航空機に対しては,航空交通管制部で監視し,適切な助言を与える.
到着空港では,気象状況の報告等の各種データを収集する.このように,航空管制官を 含む航空交通管理システムが民間航空機の運航を監視し,管理している.
関連組織においては,航空交通システムに関連した装備品をメーカが開発する.それ らを用いて,航空会社が定期旅客便を運航し,国土交通省航空局に所属する航空管制官 が航空管制を行なう.そのための基礎研究や,得られたデータの解析を,各研究機関等 が行なっている.
これまでのわが国の航空交通量であれば,航空機の運航を監視および制御する航空管
制官を前提として,その航空管制官を支援する機器を開発することで安全性と効率性を 確保することができた.データ
[1],[2]によると, 2015 年度の世界の全損事故発生率は 100 万回のフライトに対して 0.32 回である.しかし,航空管制の現場は高度な集中力が必 要なことから約 30 分でシフトを交代するような激務
[3]であり,加えて航空交通量に対 する要求は年々増加している.航空交通量の変化について, 1998 年以降の推移を図 1.2 に示す
[4].図 1.2 より,航空管制官等の定員は微減傾向にあるが,運航機数はほぼ毎年 増加していることがわかる.
図 1.2
航空管制官等の定員と運航機数の推移
図 1.3
航空路管制機関取扱い延べ機数
また,参考文献 [5] より,航空路の被管制航空機数の推移を図 1.3 に示す.図 1.3 よ
り,航空路管制機関の取扱い機数もほとんどの年で増加していることがわかる.さらに,
わが国周辺のハブ空港における国際旅客数は, 2007 年から 2013 年の年間平均増加率が 香港国際空港で 4.2 [%] ,仁川国際空港および金浦空港で 4.5 [%] ,加えて成田国際空港 および東京国際空港でも 1.1 [%] である.これらの数値より,国内だけでなく,周辺諸 国でも航空交通量が増加していることがわかる.この傾向が今後も継続し,航空交通量 が増加し続ければ,現在の航空交通管制では対応できなくなると予想される.また,航 空交通量が飽和し,航空交通が主要な社会インフラのひとつとなっているわが国の経済 的発展にも影響を及ぼすことになる.
一方,計算機をはじめ情報通信,衛星利用などさまざまな技術の進歩があり,航空管 制に関連する技術においても,従来の航空管制に取り入れ可能な技術を取り込むことが 行われている.特に,航空交通システムは CNS/ATM と呼ばれる分野によって,その構 成が分類される
[6]. CNS/ATM は,それぞれ通信( Communication ) ,航法( Navigation ),
監視( Surveillance )および航空交通管理( Air Traffic Management , ATM )である.航空 交通管理( ATM )は将来システムの中核であり, CNS はそれを実現するためのハード ウェアを構成要素とするサブシステムである.将来の航空交通システムにおいては,こ の航空交通管理において新しい技術を導入し,機械が航空管制官の業務を補佐して精密 な計測と制御を行う.その効果により,安全性の向上ばかりでなく,運航効率の向上,
交通容量の拡大を図ることが期待されている.図 1.4 ~図 1.6 に, CNS のそれぞれの 概念図を示す.
図 1.4 の通信における特徴は,音声交信によるパイロットと航空管制官の情報共有で
空港
MTSAT
航空交通管制センター
管制業務
通信施設
データ 通信
通信 Communication
音声 通信
CPDLC
等図 1.4 通信の概念図
ある.洋上等の限定された環境では,音声交信をしなくても管制指示を伝えることがで き る 航 空 管 制 官 - パ イ ロ ッ ト 間 デ ー タ リ ン ク 通 信 ( Controller Pilot Data Link Communication , CPDLC )や,全国の空港等に設置された端末等を網羅する航空交通情 報システム( Common Aeronautical Data Interchange Network , CADIN )の利用による運航 に必要な情報の共有等も行なわれている.
空港
誘導・航法 Navigation
VOR/DME VOR/DME
MTSAT
GNSS
電波 航法
衛星 航法
GBAS等
図 1.5 誘導・航法の概念図
空港
MTSAT
航空交通管制センター
監視 Surveillance
GNSS
位置 相互 情報
通信 測位
情報
ADS‐B
等図 1.6 監視の概念図
図 1.5 の誘導・航法には,超短波全方向式無線標識施設( VHF Omni-directional radio
Range , VOR )等の航空保安無線施設や, ILS ( Instrumental Landing System )および MLS
( Microwave Landing System )等の精密計器進入システム等がある.近年では,精密進 入方式のための,全地球航法衛星システム( Global Navigation Satellite System , GNSS ) を用いた地上型衛星補強システム( Ground-Based Augmentation System , GBAS )の開発 も行なわれている.
図 1.6 の監視の役割は,主にレーダ設備を用いて航空機の動態情報を取得することで ある.得られた情報を用いて,航空管制官は航空機の監視を行なう.監視レーダにも様々 なものが開発されており,二次監視レーダ( Secondary Surveillance Radar , SSR )のよう な既存のものに加えて,広域マルチラテレーション( Wide Area Multilateration , WAM ) や放送型自動従属監視( Automatic Dependent Surveillance- Broadcast , ADS-B )の利用が 進んでいる.これらについては,次章および Appendix B でより詳細に述べる.
監視は,航空交通管理においてセンサの機能に相当し,監視データを解析することは,
制御対象である航空交通の特性を調べることである.現状のパフォーマンスを分析する ばかりでなく,モデル化を行って将来の交通管理システムのコンセプトを検討するため にも必要である.これまでわが国では,監視データを解析して将来のシステムの検討に 役立てることは,あまり行われてこなかった.監視によって得られたデータを用いて,
現状を分析することがどのように有益であるかを本論文は議論する.
航空交通管理は航空機の安全かつ効率的な運航の役割を果たす要であり,航空交通量 が増加している現在において,高性能化の必要性が高まっている.欧米ではすでに,
CTAS ( Center TRACON Automation System ), TMA ( Traffic Management Advisor )および AMAN ( Arrival MANager )などのシステムが実用化されている.日本においては,東 京国際空港を中心に,航空交通管理システム導入の議論がなされている.
1.1.2 世界の状況
研究を始めるにあたり,国外の研究状況について確認する.特に,世界の航空分野を 牽引する米国と欧州は,航空交通システムの改革に積極的に取り組んでいる.本節では,
米国と欧州の航空交通に関する取り組みについて述べる.
米国は,連邦航空局( Federal Aviation Administration , FAA )により, NextGen ( Next
Generation air transportation system )と呼ばれる次世代航空交通システムの開発のための
プロジェクトを実施している
[7].図 1.7 に, NextGen が示している将来への計画につい
て示す
[8].
図 1.7
NextGen
の将来計画図 1.8 データ通信による運用の変化
図 1.7 より, NextGen では期間を定めて,具体的に導入するシステムを明確に示して
いることがわかる.また,特に ADS-B の普及と活用に力を入れていることもわかる.
参考文献 [8] の中では,新しいデータ通信のシステムも提案されている.図 1.8 には,
運航の様々な段階におけるデータ通信の将来像が述べられている.このようなシステム
の開発にも,現在の監視データを用いることでモデル化およびシミュレーションを行い,
そのシステムの実現にデータの活用が大きな寄与を果たすことができる.
図 1.9
SESAR
がもたらす便益図 1.10 飛行軌道情報の共有化
欧州は,欧州航空航法安全機構( European Organization for the Safety of Air Navigation ),
通称ユーロコントロール( Eurocontrol )を中心として, SESAR ( Single European Sky ATM
Research )と呼ばれるプロジェクトを実施している
[9]. SESAR では,図 1.9 に示すよう
に,運用における具体的数値目標が定められている.また,参考文献 [10] に示されてい
るように, SESAR においても空地間,航空管制官同士,空港間など航空交通管理シス テム全体の通信情報共有の必要性についても触れられている.図 1.10 には,例として 地上での飛行軌道の情報共有について示す
[11].
欧米ではこのように,将来計画および明確な目標を定め,多くの資源を投入して研究 開発が行われている.航空交通管理に関する研究は,軌道最適化,交通流管理,間隔制 御等において数多く発表されている.その例として,隔年で開催されている USA/Europe Air Traffic Management R&D Seminar が挙げられ,その発表原稿等は自由に閲覧すること ができる
[12].これらの研究は概して先進的であり,参考になるものが多い.
1.1.3 日本の状況
わが国の航空交通に関する研究は,航空宇宙全般を扱う国立研究開発法人宇宙航空研 究開発機構( Japan Aerospace eXploration Agency, JAXA )および CNS/ATM を扱う国立研 究開発法人海上・港湾・航空技術研究所内の電子航法研究所( Electronic Navigation Research Institute , ENRI )が中心となって行っている. JAXA 航空技術部門における航 空交通管理の研究は,気象に関わるテーマに資源を集中し,研究が行われている. ENRI は航空交通システム全般の研究開発を行なうわが国唯一の研究機関であり,航空交通シ ステムに関わる数多くの研究がなされている
[13]-[15].
欧米における航空交通管理の研究開発の進展および国際民間航空機関( International Civil Aviation Organization , ICAO )における国際的な標準化に呼応し,航空局は航空交 通システムの長期ビジョンの策定を行う目的で「将来の航空交通システムに関する研究 会」を発足させ, 2010 年に「将来の航空交通システムに関する長期ビジョン」をまと め た
[16]. こ れ ら の 取 り 組 み は , 航 空 交 通 シ ス テ ム の 変 革 に 向 け た 協 調 的 行 動
( Collaborative Actions for Renovation of Air Traffic Systems , CARATS )と呼ばれており,
日本における航空交通システムの改革における指針となっている. CARATS では,航空 交通システムの将来目標,現行の課題,変革の方向性および実現に向けた取組みについ て述べられている.また,大学ではそれまで航空交通管理に関する研究はほとんど行わ れていなかったが, CARATS において大学を含む産官学の連携が謳われている.この指 針を受けて,近年,複数の大学によって航空交通システムの研究が進められており,情 報交換等も行なわれるようになった.
日本の航空交通システムを取り巻く環境は,欧米と比較して特殊な環境にある.具体
的には,日本の地形は帯状であり,主要な航空幹線が限られていることや空港に着陸す
る航空機も特定の方向に大きな航空交通の流れをもっていることが多い.このため,全 方向から多数の航空機が集まる欧米のシステムをそのまま日本に適用するよりも,航空 交通の特徴にあったシステムを日本で独自に開発し,適用するほうが効率的であると考 えられる.
1.1.4 現行システムと研究
航空交通システムの研究について CNS/ATM の観点から整理し,残された課題点を次 節に述べる.
通信については,パイロットと航空管制官の間で音声交信が用いられている.そのた め,通信施設ごとに周波数が設定されている.航法については,以前は航空保安施設と 呼ばれる航空機の航行を援助する施設の利用が中心であったが,現在では GPS 等を利 用した衛星航法システムの活用が拡大している.監視については,航空交通管制( Air Traffic Control , ATC )に用いられるレーダが中心となっており,これらは現在も使用さ れている.さらに,マルチラテレーションシステムのような,次世代の監視システムの 研究・試験も行われている.航空交通管理では,人間である航空管制官が業務を行なっ ているため,その負荷を少しでも低減できるよう,段階的に半自動化の研究が行われて いる.
これらの研究は,前述のように欧米を中心に多くの研究が行われている.それらの研 究を大別すると,研究テーマとして以下の 7 項目を挙げることができる.
① 航空交通のシステム全体の研究
② 航空機の飛行軌道最適化( Trajectory Optimization ) ③ 航空機の飛行軌道予測( Trajectory Prediction )
④ 大規模空港などへの到着機管理( Arrival Management )
⑤ 航空機同士の干渉検知と解消( Conflict Detection and Resolution ) ⑥ 気象予報や GNSS など航空交通を支援するシステム
⑦ CNS 等の航空交通を支援する地上施設
航空交通管理の研究の目的は,安全性を向上させながら運航効率と容量拡大の要求に
対応する新しいシステムを実現することである.そのためには,現状に対する十分な理
解が必要である.特に,理想的な自動化によってどれほどの便益がえられるか,あるい
は容量の拡大が期待できるかを定量的に解析することが重要である.現状の理解のため にはすべての機体の運航データを解析する必要があり,九州大学では監視データを用い た解析を行って混雑空港への到着機の効率低下の問題を分析している.具体的には,監 視データから燃料流量などの飛行情報を推定し,動的計画法( Dynamic Programming , DP )やコストインデックス( Cost Index , CI )を用いて燃料消費量および飛行時間に最 適解を与える飛行軌道最適化の結果と比較した論文が発表されている
[17]-[22].また,大 規模空港に到着する数多くの到着航空機に対して,他機との間隔を考慮した軌道最適化 を行い,到着機管理を行なった研究も報告されている
[23].これらの研究では,運航効率 の潜在便益が定量的に示されており,参考文献 [23] においては,合流点における到着時 刻を最適化することで,合流時の干渉解消が達成されることが発表されている.また,
参考文献 [23] は監視データを用いた航空交通の分析の一つであるが,到着管理システム の潜在便益を定量化して新しいシステムの導入の必要性を明らかにすると同時に時間 を管理することが運航効率の観点からも優れていることを示し,到着管理システムのコ ンセプトの提案になっている.本論文においては,第 5 章において同様のツールを用い た議論を行っているが,運航効率の客観分析ばかりでなく,監視データを用いた分析の 有用性を第 3 章から第 5 章において示す.
1.1.5 課題点
航空交通システムに関して解決すべき現在の問題点は, CARATS の「将来の航空交通 システムに関する長期ビジョン」の中で述べられている.
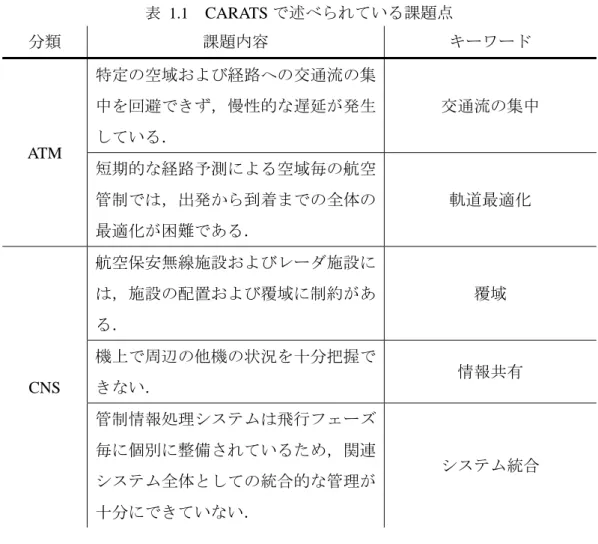
表 1.1 に航空交通システムに関連した課題点についてまとめる.まとめかたは,
CARATS で述べられている複数の課題点の中から,本研究に関連するものを抽出して再
整理し,課題内容を端的に表すキーワードを独自に追加した.
「将来の航空交通システムに関する長期ビジョン」によると, CNS においては,監
視技術の向上とシステム全体における情報共有が求められていることがわかる. ATM
においては,慢性的な遅延の発生および出発から到着までの軌道全体を管理することの
困難さが読み取れる.本研究では,特に ATM の課題について,解決策を考える為に有
益となる分析結果を示すことを目指す.
表 1.1
CARATS で述べられている課題点
分類 課題内容 キーワード
ATM
特定の空域および経路への交通流の集 中を回避できず,慢性的な遅延が発生 している.
交通流の集中
短期的な経路予測による空域毎の航空 管制では,出発から到着までの全体の 最適化が困難である.
軌道最適化
CNS
航空保安無線施設およびレーダ施設に は,施設の配置および覆域に制約があ る.
覆域
機上で周辺の他機の状況を十分把握で
きない. 情報共有
管制情報処理システムは飛行フェーズ 毎に個別に整備されているため,関連 システム全体としての統合的な管理が 十分にできていない.
システム統合
1.1.6 データ環境
航空交通システムの研究には,機体システムと同様にデータの計測・記録技術および 計算機の発展が関わっている
[24].そのため,本節では,データ技術である情報のデジタ ル化および計算機の歴史について概要を述べる.
データの記録自体は,古代から直接物に記録して保存することが行われていた.その 後,データの記録に大きな変化をもたらしたのが, 1900 年以降である.レコードおよ び磁気テープなどが 20 世紀初頭に発明され,アナログデータとして記録する技術が発 展した. 20 世紀後半になると,デジタルデータとしてデータを記録する技術が開発さ れた.ハードディスク,半導体メモリおよびコンパクトディスク等の開発により,計算 機で容易に処理が可能な大量のデータを保存できるようになった.
データ処理においては, 20 世紀に登場した電子計算機は現在も処理能力の向上が進
められている.計算能力の向上は,前述の大量のデータを処理可能にし,機器の小型化
や自動化に大きな貢献をもたらした.これらデータの計測・記録技術および計算機の高
性能化によって,ビックデータの解析が可能になった.
航空交通システムに関連するデータには,様々なものがある.最新のデータ取得環境 について見渡せば,大きく分けて機上データ,監視データ,通信データ,衛星データお よび気象データがある.機上データには, QAR ( Quick Access Recorder )データがある.
監視データには,二次監視レーダ( Second Surveillance Radar , SSR )データ,放送型自 動従属監視( Automatic Dependent Surveillance – Broadcast , ADS-B )データ,航空路監 視レーダ( Air Route Surveillance Radar , ARSR )データがあり,本論文で利用する CARATS Open Data は ARSR データを統合したものである.
以上のように,航空交通システムの解析を行なうためのデータは数多くあり,目的に 応じて選択することで,効果的に解析を行なうことができる.
さらに,国土交通省航空局によって, 2014 年に CARATS Open Data の 2012 年度版が,
2016 年に CARATS Open Data の 2013 年度版および 2014 年度版が公開されている
[25]. このように,世界各国でもデータ公開の潮流があり,今後もますますデータの活用は進 んでいくものと思われる.
1.2 研究目的
1.2.1 本研究の主題
本研究の主題は,航空交通システムの解析のためのデータ活用方法を提案し,実際の データに基づいた分析結果によって航空交通システムの現状把握,課題抽出および解決 策の検討を行なうことである.分析した結果は,航空交通量の増大によって航空交通シ ステムにどのような影響が起こり,どうすれば効率を向上できるか明らかにすることに 役立つ.
1.2.2 本研究の必要性および動機
前節の背景において述べたように,次世代の航空交通管理研究の目的は,航空交通量 の増加に対応することである.図 1.2 に示したように,航空交通量は増加しているにも かかわらず,航空管制官等の定員数に注目すると,その数は微減傾向にある.よって,
航空管制官 1 人あたりが処理しなければならない航空機数は増加していくことが予想
され,同様の傾向が継続すれば,いずれは航空管制官の処理能力を超えてしまうことも
予想できる.このため,航空交通システムの効率を向上させ,容量を拡大することが必
要である.今日の航空管制においては,人間である航空管制官にその監視と制御が任さ
れている.そのため,現行の航空管制システムにおいて,航空管制官を支援する機能は 極めて限られている.航空交通管理システムを自動化するためには,航空管制官が行っ ている業務をモデル化する必要があり,モデル化を行うためには,航空管制官が実際に どのような判断をし,管制指示を発出したかをデータから分析する必要がある.
本研究を行う動機は,わが国において実データを活用した航空交通システムの研究が 少ないことである.欧米では多様な研究機関と多くの大学が航空交通システムの研究を 行っており,互いに競い合う環境ができている.翻ってわが国においては,先述の通り,
電子航法研究所を中心とした限られた専門家によってのみ研究が行われている.そのた め,ビックデータの解析という人的資源の必要な研究について参加することは,わが国 の将来の航空交通システムのために少なからず寄与できると考えている.
さらに最近,日本では監視データの公開が行われるようになった.データの公開は,
共同研究によるものと一般公開の 2 種がある.これらの方法によってデータを活用する ことができるようになり,これまで述べたデータ活用を実際に行うことができる環境が できつつあることが,もうひとつの動機である.
1.3 分析方法
データの解析にあたっては,課題に仮説をたてて解析を行い,その結果から課題の有 無を確認する方法が効率がよい.分析内容を決定するにあたり,前述した課題に対する 仮説を立てる.仮説に対してそれぞれの解析方法を提案し,解析結果を示して課題を明 らかにするという方法を採用する.
1.3.1 仮説
前述の課題点を参考にし,整理した 3 つの課題から,以下の仮説を立てる.その後,
下記の 3 つの課題に対して分析を進める.分析方法は確立されていないため,データを
用いた分析方法を新たに提案する.
1.3.2 分析の方針
分析の方針は,前述の 3 つの課題ごとに立てるものとする.
①の干渉問題について,まず現在の空域で干渉が発生しているかどうかを評価する.
干渉が全く発生していない場合,仮説の通り,航空管制官が干渉を検知してパイロット に管制指示を与え,干渉を解消しているといえる.したがって,監視データから航空管 制官の干渉解消方法を解析し,航空交通システムの自動化において参照できるようにす る.
②のセクタ問題について,日本の空域は,大きな空域が小さなセクタと呼ばれる空域 に細分化されている.セクタ構造の詳細は, Appendix A に示す.このセクタごとのワー クロードを定量化し,セクタによる航空交通量の集中度合いを示す.また,セクタごと のワークロードを用いて,セクタの分割方法を決めるセクタ再構成も試みる.
③の上空通過機問題について,実際の運用現場では,上空通過機と国際線航空機との 間の高度干渉が指摘されている.本問題では,指摘されている干渉による効率の低下が 起こっているのか,定量的に示すことを試みる.
1.4 論文構成
第 2 章では,航空交通システムに関連するデータについて整理する.特に,本研究で
① 航空機が衝突せずに安全に運航できている背景には,航空管制官が航空 機間の干渉を検知し,その予測に基づいて干渉を解消しており,その監 視および制御にはノウハウがある.(干渉問題)
② 航空官制は予め区分けされた空域によって分担され,2名以上の航空官 制官が官制業務にあたっている.分担にあたっては官制業務のワークロ ードを過度に集中しないように空域が設計されている.空域のワークロ ードを定量化すれば,どの空域に交通流が集中しているのか明らかにで きる.(セクタ問題)
③ 航空機の機上では他機の情報がわからないため,上空通過機や国際線な どの運航の種類が異なれば,航空機間の干渉等によりその効率を低下さ せている可能性がある.(上空通過機問題)
利用するデータについては,その特性を詳細に検討する.また,データに対して解析前 に実施するフィルタ処理についても述べる.
第 3 章では,航空機間の干渉評価の方法および結果について述べる.また,干渉評価 方法の応用例として,航空管制官の管制指示を推定する方法を提案する.
第 4 章では,航空管制が実施されている我が国の空域について分析する.分析にあた っては,航空管制官にかかるワークロードの構成要素を推定して定量的に示すことによ り,セクタへの航空交通量の集中度合いを分析する.
第 5 章では,日本を離発着する国際線と,日本の空域の上空通過機について,現状の 飛行方法を中心に分析する.
第 6 章において,本研究のまとめを述べる.
論文の最後に,本論文を補足する Appendix ,参考文献および将来の航空交通システ
ムについて述べたあとがきを載せる.
第 2 章
解析のためのデータ
本章では,本研究で用いたデータに関する詳細を述べる.各データの特徴を整理する ことで,解析に選択したデータの妥当性を示す.また,データは誤差等を含むので,解 析のためにデータに施した処理についても述べる.
2.1 使用データ
次章以降の現状分析では,主に SSR data および CARATS Open Data を用いる.それぞ れを用いた理由について述べる. SSR データは位置の精度が比較的高いことと,本研究 に用いた覆域は東京国際空港周辺であり,日本の中で特に航空交通が混雑している空域 を扱うことができるためである. CARATS Open Data は, Appendix A に示す 4 つの ACC を飛行する航空機を全て扱うことができ,そのデータが 1 年間に渡って 42 日分あるた め,統計的な解析ができることにある.
2.1.1 SSR データの概要
SSR データは,東京都調布市(国立研究開発法人海上・港湾・航空技術研究所電子航 法研究所内)に設置されている二次監視レーダの取得データである.
表 2.1
SSR
データの概要日時 2012 年 2 月 21 日 00:00 ~ 24:00 (JST)
覆域 最大 250 [NM] , 40,000 [ft]
解析範囲 12,000 [ft] 以上,北緯 36.5 [deg] 以南
データ間隔 10 [s]
分析に使用したデータの概要を,表 2.1 に示す.また,解析範囲における全ての航空 機の飛行軌跡を,図 2.1 に示す.
図 2.1
SSR
データの全飛行軌跡解析範囲は,エンルートを対象としているため 12,000 [ft] 以上とした.これは,高度 帯によって航空機の速度に差があり,航空機間の間隔の取り方が異なることからエンル ートとターミナルを同じ基準で扱うことができないためである.また,北緯 36.5 [deg]
以南を解析対象としたのは,計算時間を短縮させるとともに,東京国際空港に進入する 航空機が主に南側から飛行する,日本で最も混雑する空域が含まれるようにするためで ある.図 2.1 より,東京国際空港および成田国際空港といった航空交通の混雑地域が含 まれていることがわかる.
2.1.2 CARATS Open Data の概要
CARATS Open Data は段階的に公開されており, 2017 年 1 月現在において, 2012 年度 版, 2013 年度版および 2014 年度版が利用可能である. CARATS Open Data は,国土交 通省航空局が CARATS 推進の一環として公開したものである.その目的は,より多く の大学や研究機関がデータ公開によって研究に参加し,航空交通システムの研究の裾野 を広げることである.本研究では,初期に公開された 2012 年度版の CARATS Open Data を用いることとし,以下,本文中の CARATS Open Data は 2012 年度版とする.まず本 節では, 参考文献 [25] を参照し CARATS Open Data について概要を述べる.
CARATS Open Data の概要を,表 2.2 に示す.本データは,航空路レーダ情報処理シ
ステム( Radar Data Processing system , RDP )から得られる. RDP は, ARSR および洋上 航空路監視レーダ( Oceanic Route Surveillance Radar , ORSR )からの位置情報と,管制 情報処理部( Flight Data Processing Section , FDPS )からの飛行計画情報を処理する.そ して,航空管制官が航空管制を行う際に使用するレーダ画面等を備えた管制卓に表示さ せるシステムである.
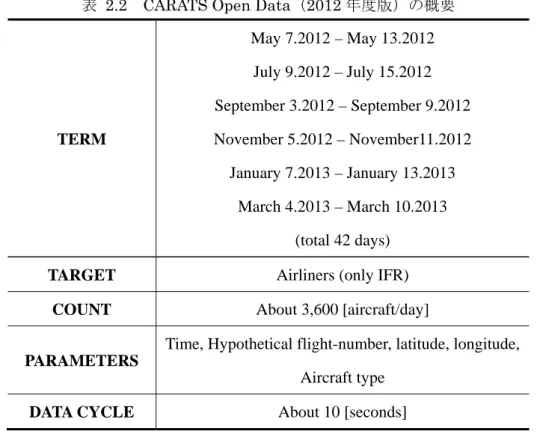
表 2.2
CARATS Open Data(2012
年度版)の概要TERM
May 7.2012 – May 13.2012 July 9.2012 – July 15.2012 September 3.2012 – September 9.2012 November 5.2012 – November11.2012
January 7.2013 – January 13.2013 March 4.2013 – March 10.2013
(total 42 days) TARGET Airliners (only IFR)
COUNT About 3,600 [aircraft/day]
PARAMETERS
Time, Hypothetical flight-number, latitude, longitude, Aircraft type
DATA CYCLE About 10 [seconds]
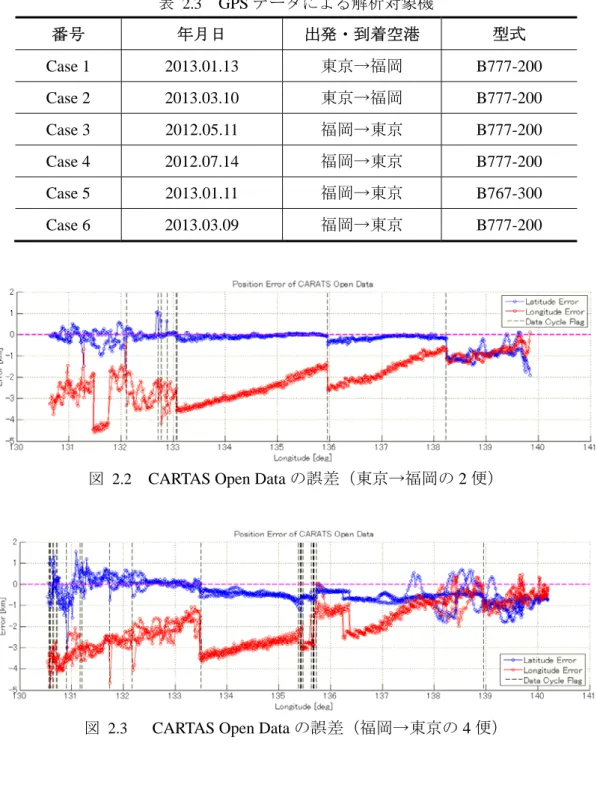
CARATS Open Data は変換誤差,位置誤差および丸め誤差等を含むため,初めにデー
タの精度を確認する.参考文献[26]では,航空機の機内で取得した GPS logger data と CARATS Open Data を比較し,精度解析を行っている.参考文献[26]の結果を引用して,
CARATS Open Data の精度について述べる.
参考文献[26]では,数あるデータの中で位置誤差の比較的小さい GPS logger data を真 値とみなしている.ここでの誤差の定義は,真値と仮定した GPS logger data と比較した
CARATS Open Data の南北方向および東西方向の位置の差を,地球を真球近似して求め
たものである.それぞれ,北および東を正としている.使用されている GPS logger data の詳細を,表 2.3 に示す.論文中に述べられている GPS logger data からの差を,東京→
福岡の 2 便と福岡→東京の 4 便のそれぞれについて,図 2.2 および図 2.3 に示す.
結果より,CARATS Open Data は誤差が比較的大きいことがわかる.誤差の主要な原
因は,時刻の丸め誤差および位置誤差である.このため,解析前に CARATS Open Data
に対してフィルタ処理を行なう必要がある.
表 2.3
GPS データによる解析対象機
番号 年月日 出発・到着空港 型式
Case 1 2013.01.13 東京→福岡 B777-200
Case 2 2013.03.10 東京→福岡 B777-200
Case 3 2012.05.11 福岡→東京 B777-200
Case 4 2012.07.14 福岡→東京 B777-200
Case 5 2013.01.11 福岡→東京 B767-300
Case 6 2013.03.09 福岡→東京 B777-200
図 2.2
CARTAS Open Data の誤差(東京→福岡の 2 便)
図 2.3
CARTAS Open Data の誤差(福岡→東京の 4 便)
2.2 フィルタ処理
データは,それぞれ固有の誤差を含んでいる.また,データを取得するハードウェア の能力から,異常値の混入を完全に防ぐことはできない.このため,データを解析する には,それ以前に何らかのフィルタ処理が必要である.
ここでは,本研究において CARATS Open Data に対し,時刻の丸め誤差および位置誤
差に関して解析前に行なったフィルタ処理の方法について述べる.次章以降では,フィ
ルタ処理を行なったデータを用いて解析を行なう.
機体固定座標系における 3 軸方向の加速度を求め,その大きさから異常値を判定する.
航空機はその構造的な制約から大きな加速度をとらないため,容易に異常値を抽出する ことができる.
具体的方法は,以下の通りである.
まず,連続する 3 点の位置情報から,対地速度および加速度を求める.位置関係を,
図 2.4 に示す.図 2.4 における x , y , z は,機体固定座標系における各軸である.
図 2.4 連続する 3 点の位置情報
時刻 t
iおよび t
i1における対地速度 V
GSは,それぞれ式 (2.1) および式 (2.2) で求められる.
i i
i
i
t t
r dt t dr
V
1
GS
( ) (2.1)
1 2
1 1
GS
( )
i i
i
i
t t
r dt t dr
V (2.2)
ここで, r は 2 点間の距離である.また,式 (2.3) より,真トラック角を求める.真ト ラック角とは,真方位で表した航空機の飛行経路方向のことである.式 (2.3) の導出は,
Appendix C に示す.
i i i
i i
i
i i i i
t
1 1
1
1 1
TRUE_TRK
cos cos
sin sin
cos
sin ) cos
(
tan (2.3)
加速度によるデータ処理方法
① 位置異常値(位置誤差の大きい部分)の除去 ② 時刻の丸め誤差の推定
③ 上昇率による高度異常値の除去
④ 手動で異常値を抽出
ここで,
TRUE_TRK[deg] :真トラック角, [deg] :緯度, [deg] :経度である.以 上より, x , y , z 方向の加速度をそれぞれ以下のように求める.
i i
i i
i i
i
x
t t
t t
t V t t V
a
1
TRUE_TRK 1
TRUE_TRK GS
1
GS
( ) ( ) cos ( ) ( )
)
(
i i
i i
i i
y
t t
t t
t t V
a
1
TRUE_TRK 1
TRUE_TRK 1
GS
( ) sin ( ) ( )
)
(
i i
i V i i V
z
t t
t V t t V
a
1
1
) ( )
) ( (
(2.4)
ここで, a
x( t
i) , a
y( t
i) , a
z( t
i) は,それぞれ x , y , z 方向の加速度 [ m/s ]
2を表す.これ らの加速度が式 (2.5) を満たすときに, 3 点目の位置情報を異常値として抽出する.
5 ) (
i
x
t a
5 ) (
i
y
t a
5 ) (
i
z
t a
(2.5)
①の段階においては, t
iから t
fにかけて連続的に行い, t
i, t
i1, t
i2の 3 点を用いて判定 を行う.異常値として 3 点目を削除した場合は,次の処理を t
i1, t
i3, t
i4について行い判 定を継続する.
次に,時刻の丸め誤差について処理を行なう. CARATS Open Data は時刻パラメータ を整数に丸めているため,各時刻に丸め誤差を含んでいる.このため,②の段階におい ては,位置誤差等を無視して時刻の推定を行う.方法としては,時刻誤差を考慮した閉 区間において,加速度が最小となる時刻を直線探索法
[27]により求める.
③では,昇降率 V
Vを式 (2.6) により求め,しきい値によって昇降率の高い位置情報を 抽出し,高度パラメータに含まれる異常値を除去する.
i i
i i i
V
t t
H H dt t dH
V
1
)
1(
1 2
1 2 1
)
(
i i
i i i
V
t t
H H dt t dH V
(2.6)
④では,③までの処理を行なった上で,次章で説明する航空機間の干渉評価を行ない,
干渉が発生した場合に該当のフライトを抽出して異常値の判定を行なうものである.本
方法では,干渉発生の原因となっているデータの該当部分について全て確認し,通常の
運用の範囲ではありえないと考えられる位置情報を抽出し,元のデータの該当する位置
情報を削除する.今回の結果では,そのほとんどが高度パラメータの瞬間的な異常値で
ある.例えば,他の航空機と 1,000 [ft] の高度差を確保して交差する際に,一方の航空機
の位置データがもう一方の航空機に重なるもしくは非常に接近した位置に瞬間的な異
常値として現れるものであった.実際の航空機において以上のような挙動は極めて可能
性が低いので,手動での削除は妥当なものであると判断している.
第 3 章
干渉評価
航空交通量が増加した際に,最も大きな問題となるのは航空機同士の干渉である.
干 渉の定義は,航空機同士が規則で定められた安全な空間的間隔を確保できておらず,異常 接近の危険性がある状態である.大きな問題となる理由は,航空機数の増加により特定 箇所に航空機が集中し,干渉の発生リスクが増加するためである.干渉の発生リスクが 増加すれば,航空交通の高い安全性が損なわれることになる.さらに,干渉を予測し解 消するための業務を行なうことで,航空管制官にかかる負荷も増大する.このように,
航空機間の干渉問題は,早期に取り組まなければならない課題である.
本章では,航空機間の干渉およびその解消方法の発見を目的とする.まず, CARATS
Open Data を用いて,航空機間の干渉の現状について分析する.さらに,航空管制官が
実際にどのようにして干渉を解消しているのかをデータから抽出し,今後の干渉解消方 法提案の参考とする.
3.1 過去の研究
干渉に関する研究は,大別して,①衝突回避,②干渉検知,③干渉解消に分類できる.
また,衝突回避や干渉解消は,その干渉を予測する時間的長さの違いによって,長期間,
中期間,短期間に分けることができる.衝突回避はその大部分が中距離および短距離で あり,干渉解消は中距離に分類されるものが多い.
衝突回避については,航空機モデルと各種最適化手法を用いて回避軌道を生成する研
究
[28]や, ACAS を用いた研究
[29], ASAS ( Airborne Separation Assurance System )を用い
た研究
[30]などが数多く報告されている.干渉検知は干渉解消と合わせて報告されている
ことが多い.また,航空管制官のワークロードを考慮した干渉回避の研究
[31]も報告され ている.他に関連研究として,コンフリクトフリーの最適軌道を生成した研究
[32]や航空 機の意図を推定して軌道予測を行った研究もある
[33].これらから,ある距離を置いて干 渉を検知し,確率と最適化手法を用いて最適軌道を生成する研究が注目されているとい える.
実際のデータを用いた研究としては,データから干渉解消手法を抽出した研究
[34],[35]やニューラルネットワークおよびサポートベクターマシン等の手法を用いて干渉回避 の方法を分類した研究
[36]もある.しかしながら,実際のデータを用いて網羅的に干渉解 消方法を整理した研究は,ほとんど見られない.
本章で行う干渉評価方法および回避指示推定の方法は,参考文献 [37] に報告した内容 が基礎になっている.次節以降に,その詳細を述べる.
3.2 干渉の現状分析
3.2.1 評価方法
まず,干渉の評価方法の手順について説明する.以下に手順を示し,以降,それぞれ の詳細について述べる.
①では,まず評価対象の空域において,飛行している航空機の 2 機の組合せを,時刻 ごとに作成する.次に,それらの組合せにおいて,式 (3.1) および式 (3.2) から水平面相対 距離 d [NM] および高度差 Δh [ft] を求める.
1 1 1
1 1
2 2 2
2 2 1
sin sin cos
cos cos
sin sin cos
cos cos 2 sin 1 2
R R d
(3.1)
1
2
![図 1.7 NextGen の将来計画 図 1.8 データ通信による運用の変化 図 1.7 より, NextGen では期間を定めて,具体的に導入するシステムを明確に示して いることがわかる.また,特に ADS-B の普及と活用に力を入れていることもわかる. 参考文献 [8] の中では,新しいデータ通信のシステムも提案されている.図 1.8 には, 運航の様々な段階におけるデータ通信の将来像が述べられている.このようなシステム](https://thumb-ap.123doks.com/thumbv2/123deta/9922194.1921624/18.892.179.802.115.498/データによるシステムがわかるもわかる新しいシステムシステム.webp)
![表 3.1 干渉評価の解析範囲 空域 洋上管制区を除く 福岡 FIR 航空機 定期旅客便 高度帯 12,000 [ft] 以上 sufficient separation proximity 図 3.2 干渉評価結果( 2012.5.7 ) sufficient separation proximity 図 3.3 干渉評価結果(2012.5.8) sufficient separation proximity 図 3.4 干渉評価結果( 2012.5.9 )](https://thumb-ap.123doks.com/thumbv2/123deta/9922194.1921624/38.892.203.772.125.1142/干渉評価解析範囲空域洋上管制除く福岡航空機定期旅客高度以上.webp)