平成 23 年度 修士論文
シミュレータ・モデリング・最適化手法を 統合したモータ汎用最適設計システム
首都大学東京大学院 理工学研究科 電気電子工学専攻
小菅 崇裕
論文要旨
近年、モータはエアコン・洗濯機・掃除機などの家電製品をはじめ、自動車関係、医療 関係など様々な分野に用いられており、社会に必要不可欠な存在となっている。
またモータは化石燃料を用いるエンジンと異なり電気によって駆動するため、二酸化炭 素排出の面において環境への影響が大幅に軽減されるだけでなく、エネルギー変換効率に おいても大幅にエンジンを上回っている。自動車業界においてはエンジン駆動の自動車か らモータ駆動の電気自動車への移行が進みつつあり、モータの需要は今後も着実に高まっ てくることが予想されている。
このような背景を踏まえると、今後モータの需要の増加と共に、モータに求められる要 求はより高度化・複雑化することになろう。現在のモータ設計方法は、熟練者の経験に基 づく試行錯誤により、比較的低次元の設計問題として扱われることが多い。この方法では 高度化・複雑化した要求に応えるために更に詳細な設計、すなわち高次元の設計を実現す ることが重要となるが、熟練者の試行錯誤による設計では実用的な時間内に高度化・複雑 化した要求を満たす設計を実現することは極めて困難であることが指摘されている。
近年、このような課題を解決する為に
Genetic Algorithm(GA)
やSimulated Anneal-
ing(SA)
などの発見的最適化手法を用いてモータ設計を行う研究もされてきているが、実用化の領域には達していないのが現状である。
本研究では、上述のようなモータ設計を取り巻く現状を踏まえ、まず始めに「モータ設計 問題の抱える課題」、及び「設計問題に最適化手法を適用する際の課題」を明らかにした。
具体的には、「モータ設計の抱える課題」として、
1
設計パラメータ数の増加、2
問題構 造の複雑化、3
要求する目的の多様化に、一方「設計問題に最適化手法を適用する際の課 題」として、1
実際の設計問題と数理モデルの乖離、2
シミュレータ負荷による膨大な計論文要旨
ii
算時間に着目した。
「モータ設計の抱える課題」及び「設計問題に最適化手法を適用する際の課題」を双方 とも解決できる新たな枠組みに基づく設計システムが必要である。そこで本研究では、統 合的最適化の枠組みに基づく汎用的なモータ最適設計システムを構築すると共に、実際の モータ設計問題に適用し、設計者の試行錯誤により得られた最適な形状と比較を行い、その 有用性の検証を行った。なお、本研究で用いたサーフェスモータは、シミュレーションにか かる時間が膨大であることを考慮し、本研究ではモータ汎用最適システムにおいてシミュ レータ負荷が重い場合を対象とする方法を主として扱った。以下に本研究の成果を示す。
(
1
) モータ汎用最適設計システムの構築「モータ設計の抱える問題点」及び「モータ設計に最適化手法を適用する際の問題 点」を双方とも解決できる方法が必要であると考えられる。そこで、近年の電磁界 解析技術、モデリング技術、最適化手法の発展に着目し、シミュレータ・モデリン グ・最適化手法を統合したモータ設計における問題点を解決するための新たな汎用 最適設計システムを提案した。
(
2
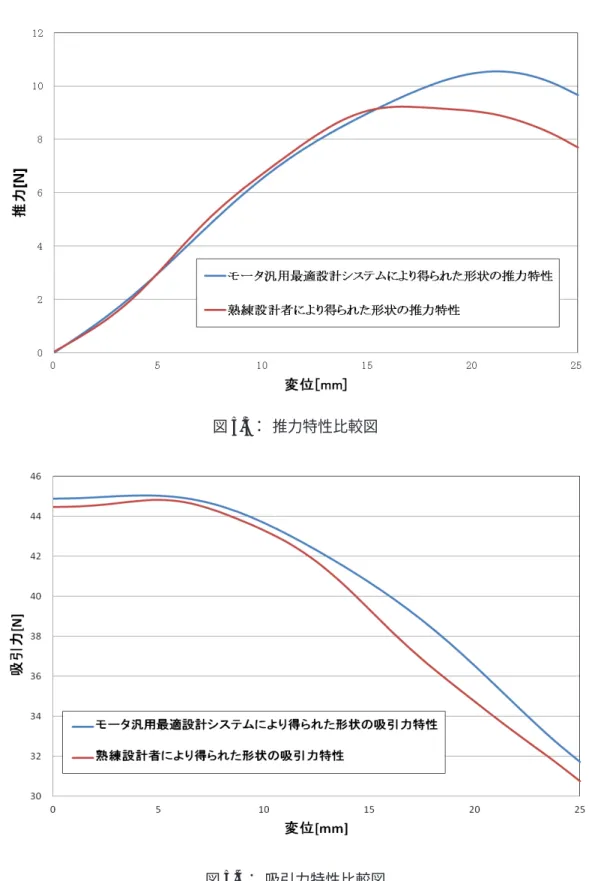
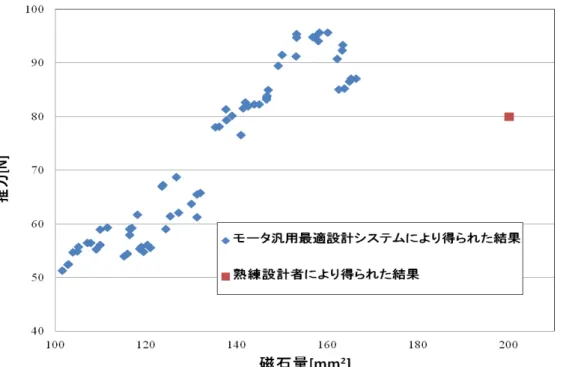
) サーフェスモータの単一目的最適設計サーフェスモータにおいて、水平に進む力(推力)の性能向上は実用化に向け大き な課題となっている。しかし、推力を上昇させようとすると、同時に垂直方向への 力(吸引力)も同時に上昇し吸引力により構造的にサーフェスモータが動作しなく なる。この事から、推力・吸引力の間にはトレードオフ関係が成立すると共に、吸 引力の上昇によりサーフェスモータが動作しないことから、吸引力が支配的な要素 であると考えた。そこで、本研究では吸引力を制約として扱うと共に、システムに 合致した新たな制約付加方法を提案し、サーフェスモータの推力特性の向上を目指 した。その結果、従来の熟練設計者により求められた最適な形状を上回る性能を持 つ形状を得ることができた。
(
3
) 目的間のトレードオフ関係を考慮したサーフェスモータの多目的最適設計近年、モータ設計は使用されるレアアースなどの材料不足から、磁石量を考慮した 設計が課題となっている。サーフェスモータにおいても磁石にレアアースを用いて おり、磁石量の低減が望ましい。しかし磁石量は推力と密接に関係するためトレー ドオフ関係が成立しており、また優先順位をつけることも困難であるため、推力・磁
論文要旨
iii
石量を目的とした
2
目的設計問題であるといえる。本研究では、多目的設計問題を 解くためシステムの多目的への拡張を行うとともに、従来の熟練者により求められ た最適な形状と比較し、推力上昇、または磁石量の低減するような形状を目指した。目次
論文要旨
i
1
序論1
1.1
本論文の背景と目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1.2
本論文の構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3
2
モータ汎用最適設計システム4
2.1
「モータ最適設計問題の抱える課題」及び「最適設計問題に最適化手法を 適用する際の課題」・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 2.2
モータ汎用最適設計システム・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・6
2.2.1
モータ汎用最適設計システムのアルゴリズム ・・・・・・・・・・・・・・・9
2.2.2
モータ最適設計問題の分類によるシステムの対応 ・・・・・・・・・・・・10
3
システムの構成要素13
3.1
単一目的最適設計問題の場合・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 3.1.1
最適化手法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・13 3.1.2
モデリング手法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・18 3.1.3
サンプル点配置の方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・20 3.2
多目的最適設計問題の場合・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・24 3.2.1 Multi Objective Pariticle Swarm Optimization
・・・・・・・・・・・・・25 3.2.2
サンプル点の配置方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・27
4
サーフェスモータの最適設計29
目次
v
4.1
サーフェスモータ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・29 4.1.1
サーフェスモータの概要 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・29 4.1.2 SFM
の動作原理 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・30 4.1.3 SFM
の選択理由 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・30 4.2
単一目的最適設計問題においてのサーフェスモータの設計方針・・・・・・・・32 4.2.1
サーフェスモータの設計箇所 ・・・・・・・・・・・・・・・・・・・・・・・・・・・33 4.2.2
評価方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・33 4.2.3
制約によるペナルティ付加方法 ・・・・・・・・・・・・・・・・・・・・・・・・・35 4.3
多目的最適設計問題においての設計方針・・・・・・・・・・・・・・・・・・・・・・・・・36 4.3.1
設計箇所 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・37 4.3.2
評価方法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・37
5
シミュレーション結果39
5.1
単一目的最適設計問題・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 5.1.1
シミュレーション条件 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 5.1.2
シミュレーション結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・40 5.2
多目的最適設計問題・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 5.2.1
シミュレーション条件 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 5.2.2
シミュレーション結果 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43
6
結論48
A 50
参考文献
54
謝辞
57
1 序論
1.1 本論文の背景と目的
近年,モータはエアコン・洗濯機・掃除機などの家電製品をはじめ,電子機器,医療機 器,自動車など様々な分野において使用されており,我々の生活において必要不可欠な存 在となってきている。
モータは電気エネルギーを運動エネルギーに変換し,その効率は制御方法などの工夫に より
90
%以上となる。エンジンの変換効率といわれている15
%程度と比較すると,その エネルギー変換効率は大変優れている。また,運動エネルギーを取り出すために化石燃料 などを用いるエンジンは,排気ガスにより地球環境に悪影響を与えるのに対して,モータ は電気により駆動し排気ガスを出さない為,地球への悪影響を心配することなく使用する ことが可能である。自動車業界においては,エンジン駆動の自動車から,モータ駆動の電 気自動車への移行が進みつつある。このようなことを踏まえ,モータの需要は今後も着実 に高まっていくことが予想される。しかし,需要の高まりと同時に,モータに求める要求はより高度化・複雑化していくこ とが予想できる。現在のモータ設計方法は,熟練設計者の経験に基づく試行錯誤により,
比較的低次元の設計問題として扱われることが多い。高度化・複雑化した要求に応えるた めには,詳細な設計,すなわち高次元の設計を実現することが重要となるが,熟練設計者 の経験に基づく試行錯誤による設計方法では,実用的な時間内に高度化・複雑化した要求 を満たす設計を実現することは極めて困難であることが指摘されている。
第
1
章 序論2
上記のような課題を解決する方法として,最適化手法が注目されてきている。最適化手 法とは数ある選択肢の中から最適な組み合わせを選ぶための手法である。電力システムに おける複数発電機が存在するとき,どの発電機にどれだけ発電する量を割り当てるかという コストの最小限に抑えるような負荷配分問題,またデバイスを設計する際,ノイズを最小限 に抑えるため素子をどのように配置するかという問題など,工学分野をはじめ様々な分野 で最適化手法は活用されている。モータ最適設計問題においても,逐次的に解を求めてい くローゼンブロック法や,発見的最適化手法である
Genetic Algorithm(GA)
やEvolution Strategy(ES)
,Simulated Annealing(SA)
などを用いる研究もされてきているが,実用化 の領域には達していないのが現状である[7
][8
][9
]。そこで本研究では,上記のようなモータ設計を取り巻く現状を踏まえ,まず始めに「モー タ最適設計問題の抱える課題」,及び「最適設計問題に最適化手法を適用する際の課題」を 明らかにし,双方とも解決できる新たな枠組みが必要であると考え,統合的最適化の枠組 み[
13
][14
][15
]に基づく汎用的なモータ最適設計システムを構築した。また,最適設計問 題は目的の数に合わせてシステムの構築が必要となることを考慮し,「単一目的最適設計問 題」,及び「多目的最適設計問題」双方に対応できるようにシステムを構築した。そして,構築したシステムをサーフェスモータの単一目的最適設計問題,及び多目的最適設計問題 に適用し,熟練設計者の試行錯誤により得られた最適な形状と比較を行い,その有用性を 検証した。
第
1
章 序論3
1.2 本論文の構成
本論文は全
6
章から構成されており,各章の概要は以下の通りである.第1
章“
序論”
では, 本論文の目的と背景について述べる.第
2
章“
モータ汎用最適設計システム”
では,モータ最適設計問題,及び最適設計問題 に最適化手法を適用する際の課題について詳しく述べ,その課題を解決するための本研究 で提案するモータ汎用最適設計システムの概要,アルゴリズム,モータ最適設計問題の違 いによるシステムの対応について述べる。第
3
章“
モータ汎用最適設計システムの構成要素”
では,単一目的最適設計問題におけ るシステムの構成要素,多目的最適設計問題におけるシステムの構成要素と分類し,その 構成要素について詳しく述べる。第
4
章“
サーフェスモータの最適設計”
では,本研究で実験を行ったサーフェスモータ について述べ,単一目的最適設計問題における設計方針,多目的最適設計問題における設 計方針について述べる。第
5
章“
シミュレーション結果”
では,本研究で得られた単一目的最適設計問題におけ るシミュレーション結果,多目的最適設計問題におけるシミュレーション結果について述 べる。第
6
章“
結論”
では, 本論文の結論を述べる。付録では,第
4
章における部分の補足を行う。2 モータ汎用最適設計シス テム
本章では,「モータ最適設計問題の抱える課題」及び「最適設計問題に最適化手 法を適用する際の課題」について詳しく述べると共に,双方の課題を解決するた めに提案する「モータ汎用最適設計システム」の詳細,及びアルゴリズムについ て述べる。
2.1 「モータ最適設計問題の抱える課題」及び「最適設計問 題に最適化手法を適用する際の課題」
本研究では,
1
章で述べたモータを取り巻く環境の変化を踏まえ,「モータ最適設計問題 の抱える課題」及び「最適設計問題に最適化手法を適用する際の課題」を明らかにした。下記にその具体的な内容を示す。
モータ最適設計問題の抱える課題
•
設計パラメータ数の増加近年の技術進歩に伴い,より高品質・高性能なモータが要求され,高次元の設計 を実現することが必要となってくる。しかし,モータ設計は目的を満たす最適な形 状を得るためには,熟練設計者が試行錯誤を繰り返し設計を行う事が主流である。
そのため,設計パラメータの増加に伴い組み合わせの数も膨大となり,熟練設計者
第
2
章 モータ汎用最適設計システム5
の試行錯誤により最適な形状を求めることが困難となる。
•
問題構造の複雑化最適設計問題の解構造は,単純に最適な解が一つに定まるような構造(単峰性構 造)ではなく,凹凸が複数存在し局所的にみて最適な解が複数存在する構造(多峰 性構造)が多い。この場合,試行錯誤による設計では局所的にみた解を最適な解と して認識してしまい,最も最適な解を見つけることが困難となる。
•
要求する目的の多様化近年の技術進歩により,モータ設計は性能の向上やコストの削減,軽量化など要 求する目的の多様化が考えられる。そのため,高品質・高性能のモータを実現する には多様な要求を満たしつつ設計を行う必要がある。しかし,従来の試行錯誤を用 いた設計方法では,まず一つの目的に着目し,設計を行い,最適な形状を得てから,
次にその形状を基に他の目的において再度設計を行い,複数の目的を満たす形状の 設計を行っていく。そのため,要求を満たす形状を得るまでに大幅な時間を要する こととなる。
最適設計問題に最適化手法を適用する際の課題
•
実際の最適設計問題と数理モデルの乖離最適設計問題に最適化手法を適用する際,最適化手法が適用可能なクラスまで問 題の定式化を行う必要がある。しかし,実際の最適設計問題は定式化が困難な場合 が多々存在し,無理に定式化を行い最適化手法を適用可能な状態にして最適設計問 題を解いたとしても,得られた解と実際の設計との乖離により最適化を行えない場 合が生じる。
•
シミュレータ負荷による膨大な計算時間モータ設計において,シミュレーション技術の発展により
2
次元解析・3
次元解析 を高精度で行えるようになった。しかし,シミュレーション解析にかかる時間が膨 大であるため,熟練設計者による試行錯誤回数,及び最適化手法による試行回数は 限られてくる。そのため,実用時間内に最適な形状を求めるのは困難となっている。第
2
章 モータ汎用最適設計システム6
2.2 モータ汎用最適設計システム
以上のような「モータ最適設計問題の抱える課題」及び「最適設計問題に最適化手法を 適用する際の課題」を踏まえると,双方ともに解決できる新たなシステム開発が望ましい。
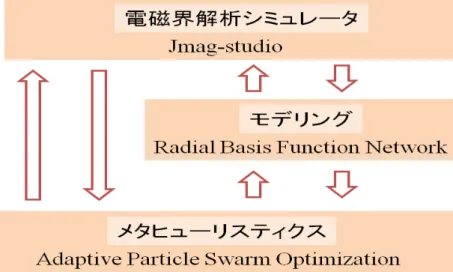
そこで本研究では,安田・河原林らが提案した「統合的最適化」の枠組みに着目した。「統 合的最適化」は,実システムのモデル化が比較的容易で,最適化手法が適用可能である電 気・電子・情報工学といった分野のみならず,工学全般への最適化手法の普及を目指し構 築された枠組みである。近年のコンピュータ計算能力向上による実用時間内での計算量の 飛躍的増加,有限要素法をはじめとするシミュレーション技術・モデリング技術の発展に よる,数理モデル化が困難な対象においての精緻なシミュレーション,また最適化手法の
1
種である数理計画法で必要であった微分可能性・連続性などを必要とせず,設計変数情 報とその評価値情報のみで最適化可能な,解直接探索型のメタヒューリスティクスの発展 など,最適化手法を取り巻く環境の変化,及び様々な諸技術の発展に着目し,最適化を取 り巻く周辺技術を最大限に活かすように構築されている。図
2.1
に統合的最適化の詳細を記す。以下の1
〜4
が統合的最適化の主要な枠組みとなっ図
2.1
: 統合的最適化の枠組み第
2
章 モータ汎用最適設計システム7
ている。1
数理モデルに基づく従来型最適化実対象を最適化手法を適用可能なクラスまで数理モデル化し,この数理モデルに対 して数理計画法やメタヒューリスティクスを適用して最適化を行う方法。最も一般 的な最適化の形態であり,実システムと数理モデル間に乖離が少ない場合,有効と なる。
2
シミュレータからの評価値情報を用いた最適化実対象をシミュレータで模擬し,シミュレータから得られる性能評価値を用いてメ タヒューリスティクスなどの解直接探索型最適化手法を適用して最適化を行う方法。
シミュレータの近似精度が高く,かつシミュレータ負荷が軽く計算時間が短い場合 に有効となる。
3
計測システムからの評価値情報を用いた最適化実対象を計測システムにより直接評価し,その性能評価値を用いてメタヒューリス ティクスなどの解直接探索型最適化手法を適用して最適化を行う方法。計測システ ムの負荷が軽く計算時間が短い場合に有効となる。
4
シミュレータ及び計測システムの情報から数理モデルを用いた最適化シミュレータや計測システムから得られる性能評価値を直接用いて最適化を行うの ではなく,その評価値情報を用いて数理モデルを構築し,数理モデル上において最 適化手法を適用し最適化を行う方法。シミュレータ・計測負荷が重い場合に非常に 有効となる。
本研究では,この統合的最適化の枠組みに基づき,シミュレータ,モデリング技術,及 び最適化手法を統合した,モータ最適設計のための新たなシステムを構築した。また最適 設計問題は,目的が単一である「単一目的最適設計問題」,目的が複数存在する「多目的最 適設計問題」に分けられ,目的の数に合わせてシステムの構築が必要となる。モータ最適 設計問題において,双方に対応できるようにシステムを構築した。本研究で提案するモー タ汎用最適設計システムの概要を図
2.2
に示す。第
2
章 モータ汎用最適設計システム8
モータ汎用最適設計システムは,主に下記の2
つの方法から構築される。(
1
) 電磁界解析シミュレータからの評価値情報を用いてメタヒューリスティクスにより 最適化を行う方法。(
2
) 電磁界解析シミュレータの評価値情報から構築した数理モデルを用いて最適化を行 う方法。これにより,シミュレータ負荷が軽く計算時間が短い場合は
(1)
を,シミュレータ負荷が 重く計算時間が長い場合は(2)
を用いることで,使用者の状況に合わせて設計を行う事を 可能とした。図
2.2
: モータ汎用最適設計システム第
2
章 モータ汎用最適設計システム9
2.2.1
モータ汎用最適設計システムのアルゴリズムモータ汎用最適設計システムのアルゴリズムについて説明を行う。シミュレータ負荷が 軽く,計算時間が短い場合のアルゴリズムについて説明を行う。
【電磁界解析シミュレータからの評価値情報を用いて最適化を行う方法】
Step 0:[
準備]
選択した最適化手法において,設計変数情報など初期条件に必要な情報を設定する。
Step 1:[
評価値算出]
電磁界解析シミュレータを用いてシミュレーションを行い,評価値情報を入手する。
Step 2:[
最適化手法による更新]
最適化手法を用いて設計変数情報の更新を行う。
Step 3:[
終了判定]
試行回数が設定した数に到達したならば終了,そうでなければ
Step 1
へ戻る。このように,基本的には最適化手法で必要な評価値情報をシミュレータから得ればよい方 法となっている。シミュレータ負荷が軽い場合には,試行回数を多く設定できるため,こ の方法が非常に有効となる。
次に,本研究で扱うサーフェスモータのように,シミュレータ負荷が重い場合に用いる アルゴリズムを下記に示す。
【電磁界解析シミュレータの評価値情報から構築した 数理モデルを用いて最適化を行う方法】
Step 0:[
準備]
初期サンプル点数
N
start,追加サンプル点数N
add,総サンプル点数N
maxを設定し,N
startだけ初期サンプル点x
を生成する。Step 1:[
サンプル点の評価値算出]
シミュレーションを行い,目的の数のサンプル点評価値情報を入手する。
Step 2:[
応答曲面生成]
モデリング手法を用いて,各目的の評価値情報に対応した応答曲面を生成する。
Step 3:[
最適化手法適用]
第
2
章 モータ汎用最適設計システム10
生成した応答曲面に最適化手法を適用し,応答曲面上の解を得る。
Step 4:[
サンプル点の追加]
応答曲面より得られた解をもとに,
N
addだけサンプル点を追加する。Step 5:[
終了判定]
現在のサンプル点数
N
がN > N
maxならば終了,そうでなければStep 1
へ戻る。このようにモデリング手法を用いて応答曲面を生成し,その応答曲面上において最適化 手法を適用し,最適解を探索することにより,シミュレーション回数をサンプル点数に抑 制することができ,シミュレーションに要する時間を大幅に減らし良好な解を探索するこ とが可能な機構となっている。
2.2.2
モータ最適設計問題の分類によるシステムの対応モータ最適設計問題のような最適化を行う問題は,大きく分類すると,最適化すべき目 的が一つである「単一目的最適化問題」,最適化すべき目的が複数存在する「多目的最適化 問題」の
2
種類となる。下記にその二つの説明を行う。単一目的最適化問題は,目的が一つしか存在しない最適化問題のことを指す。目的が一 つであることから最適な解を一意に決定することが可能となる。そのため,最適化手法の 適用が比較的容易となる。
多目的最適化問題とは,複数の目的関数を持つ最適化問題である。多目的最適最適化問 題は
2
種類存在し,1
目的間に明確な優先順位がたてられる場合,2
目的間に優先順位が 存在しない場合,がある。1
の場合は目的間にトレードオフ関係が存在するが,優先順位 の高い目的を制約として,単一目的最適化問題として扱うことが可能である。2
の場合に は,目的間にトレードオフ関係が存在し,かつ目的間に優先順位をつけることが困難な場 合である。この場合,単一目的最適化問題のように一意に解を決定することができない。そのため,ある目的では他の解より優れているが,他の目的においては劣るという解の集 合であるパレート最適解(非劣解)を求めることが,
2
においての目標となる。パレート 最適解について,下記に説明を記載する。第
2
章 モータ汎用最適設計システム11
図
2.3
:f − x
平面におけるパレート最適解 図2.4
:f
1- f
2平面におけるパレート最適解パレート最適解
一般的に,目的間にトレードオフ関係が成立し,かつ優先順位が存在しない多目 的最適化問題には,全ての目的関数を同時に最小化する最適解(完全最適解)は存 在しない。そのため,複数の目的関数を同時に改善することが不可能な解であるパ レート最適解を求めることが重要となる。
2
目的,1
変数の最小化問題において図2.3
,図2.4
を用いて説明する。図2.3
,図2.4
において,解の優越関係は以下のよう に定義される。(
1
)f(x
1) ≤ f(x
2)
の時,x
1はx
2に優越する。(
2
)f(x
1) ≺ f(x
2)
の時,x
1はx
2に強い意味で優越する。この時,ある数
x
0に対して優越するx
が存在しない時,x
0 をパレート最適解とい う。目的関数f
1の最適解をx
1,目的関数f
2の最適解をx
2とすると,図2.3
,図2.4
のおいてパレート最適解は図中のx
1,x
2で囲まれた部分となる。本研究では,このように,最適化問題を分類することで,下記のようにモータ最適設計問 題を分類した。
•
単一目的最適設計問題第
2
章 モータ汎用最適設計システム12
最適化すべき目的が一つのみである最適設計問題。
•
多目的最適設計問題–
目的間で明確な優先順位がつく場合最適化すべき目的が複数あるが,その目的間に明確な優先順位が存在してい る場合の最適設計問題。この場合,優先順位が高い目的を制約として扱う事に より,有制約単一目的最適設計問題として扱う事が可能となる。
–
目的間に優先順位がつかない場合最適化すべき目的が複数あるが,その目的間に優先順位が存在しない場合の 最適設計問題。この場合,優先順位が定まらないため,トレードオフの関係が 成立しており,全ての目的において他を上回る設計を見つけることは出来ない。
そのため,パレート最適化(非劣解)集合を求め,使用者の要求に合わせて選 択できることが望ましい。
最適設計問題は単一目的最適設計問題と多目的最適設計問題により,システムの構成要 素を一部変更する必要性がある。そのため,より構成要素の分類を明確化する為にも,こ のように分類した。
また,単一目的最適設計問題は,無制約単一目的最適設計問題にも適用可能な事,及び最 適設計の対象としたサーフェスモータの実用化向上から有制約単一最適設計問題を,多目 的最適設計問題は,目的間に優先順位がつかない場合の多目的最適設計問題を扱うとした。
3 システムの構成要素
本章では,構築したモータ汎用最適設計システムを構成する構成要素について 述べる。
2
章において,モータの最適設計問題には大きく分類して,単一目的最 適設計問題,多目的最適設計問題が存在することを説明した。最適化手法を適用 する際,単一目的最適設計問題において用いたシステムを多目的最適設計問題に 直接適用することができない。そのため,構成要素を変化させ対応させる必要が ある。そこで,単一目的最適設計問題における構成要素,多目的最適設計問題に おける構成要素を分類して説明を行う。3.1 単一目的最適設計問題の場合
単一目的最適設計問題においては,各要素において図
3.1
に記載するものを用いた。3.1.1
最適化手法数理計画法などの最適化手法を用いるためには,微分可能性や連続性などが必要である。
しかし,シミュレータから評価値情報を得て直接最適化を行う場合,微分可能性や連続性 などは得られないため,数理計画法を適用することが困難である。そこで我々は,近年注 目が集まってきているメタヒューリスティクス[
1
]に着目した。メタヒューリスティクスは第
3
章 システムの構成要素14
図
3.1
: 単一目的におけるシステムの構成要素評価値情報,及び設計変数情報のみで最適化を行う事が可能なため,シミュレータを用い ることが可能な手法である。
本研究では,メタヒューリスティクスとして,
Particle Swarm Optimization(PSO)
[4
] を基に山口らによって提案された適応型Paticle Swarm Optimization(APSO)
[5
]を用い た。以下にAPSO
の原型となるPSO
について,次にAPSO
についての説明を行う。Particle Swarm Optimization
Particle Swarm Optimization(PSO)
は単純化された社会のシミュレーションを通じて 開発されたメタヒューリスティクスの一つである。基本的な概念は,鳥の群れがえさを探 す行動研究によって導かれた「情報を群れ全体で共有する」という仮定に基づき構築され ている。すなわち,群を構成する個体が独立して行動するのではなく,群を構成する個体 の個別最良情報(pbest
)と,群全体の共通の最良情報(gbest
)を組み合わせ,一定の 規則に従って行動するという概念である。PSO
の探索は個体の位置情報(x
i)
とその評価 値情報f (x
i)
という少ない情報を扱う点や簡単なベクトルの合成による非常にシンプルな アルゴリズムでありながらも,非線形な問題構造をもつ最適化問題に対しても高速化か つ最適性の高い探索性能を有することが確認されている。PSO
は多点による探索であり,第
3
章 システムの構成要素15
個々の
Particle
が群全体の情報を共有しながら探索を行う点も大きな特徴である。n
次元空間における一つの
Particle
は,n
次元ベクトルであるx
i= (x
i1, x
i2, · · · , x
ij, · · · , x
in)
T,v
i= (v
i1, v
i2, ..., v
ij, ..., v
in)
T をもっている。さらに各Particle
はそれまでの探索で発見し たそれぞれの最良解pbest
i= (pbest
i1, pbest
i2, · · · , pbest
ij, · · · , pbest
in)
T と,その評価値f(pbest
i)
を記憶している。群としては,すべてのParticle
がこれまでの探索で発見した最良解
gbest
i= (gbest
i1, gbest
i2, · · · , gbest
ij, · · · , gbest
in)
T と,その評価値f(gbest
i)
を 記憶している。PSO
の探索では各Particle
がこれらpbest, gbest
の情報を用いた以下の式により移動 が行われる。v
ijk+1= w · v
kij+ c
1· rand
1ij· (pbest
kij− x
kij) + c
2· rand
2ij· (gbest
kj− x
kij) (3.1) x
k+1ij= x
kij+ v
ijk+1, i = 1, 2, · · · , m; j = 1, 2, · · · , n (3.2)
なお,
rand
1ij, rand
2ijは,0
から1
の間に分布する一様乱数,w, c
1, c
2はそれぞれの項に対 する重みパラメータであり,w
は慣性パラメータと呼ばれている。またk
は反復回数であ る。各Particle
は現在の位置x
ki から,それぞれの最良解へ向かうベクトル(pbest
ki− x
ki)
, 郡全体の最良解へ向かうベクトル(gbest
k− x
ki)
を利用した式で更新され,移動ベクトルv
ik+1を得る。ここで生成されたv
ik+1によりx
k+1i を得る。この操作の繰り返しにより解の 探索が行われる。このように複数の探索点を用いる点,またParticle
が個別の情報と共に 郡全体の情報を利用するという点が,PSO
のアルゴリズムの一番の特徴と考えられる。図3.2
にPSO
のイメージ図を載せる。適応型
PSO
本研究で用いる適応型
PSO
では,従来PSO
において固定パラメータであったc
1,c
2が 探索状況に応じて以下の式により逐次的に改善される。c
k+11i= c
k1i+ α
ki(cbest
k1− c
k1i), i = 1, 2, · · · , m (3.3) c
k+12i= c
k2i+ α
ki(cbest
k2− c
k2i), i = 1, 2, · · · , m (3.4)
α
ik= 0
1/T
max(3.5)
第
3
章 システムの構成要素16
図
3.2
:PSO
のイメージ図ここでステップ幅
α
,c
1i及びc
2i(i = 1, 2, . . . , m)
は各Particle
ごとに独立に調整される。α
iは探索状況に応じて,0
又は1/T
maxの2
つに選択される。また,cbest
k1iとcbest
k2iはあ るイテレーションにおいてgbest
を更新したParticle i
の持つパラメータの値を表す。上 述の適応型PSO
のアルゴリズムを以下に示す。【適応型
PSO
のアルゴリズム】Step 0:[
準備]
Particle
数2 ≤ m ∈ R
1,Particle
のパラメータ0 < w ∈ R
1を設定し,k = 1
とす る。また,最大反復回数T
maxを設定する。Step 1:[
初期化]
各
Particle
の初期位置x
0i と初期速度v
0i を実行可能領域内にランダムに与える。更 に,重み係数c
11i,c
12iを0 < c
11i< 3
,0 < c
12i< (3 − c
11i)
,i = 1, 2, · · · , m
に示す領 域内にランダムに設定する。gbest
更新回数のカウンターをg
i= 0
,i = 1, 2, · · · , m
とする。pbest
0i= x
0i, i = 1, 2, · · · , m
gbest
0= pbest
0ig第
3
章 システムの構成要素17
とおく。ただし,i
g= arg min
i
f(pbest
0i)
1Step 2:[
速度と位置の更新]
各
Particle
の速度v
iと位置x
iを次式で更新する。v
ijk+1= w · v
kij+ c
k1i· rand
1ij· (pbest
kij− x
kij) + c
k2i· rand
2ij· (gbest
kj− x
kij) x
k+1ij= x
kij+ v
ijk+1, i = 1, 2, · · · , m; j = 1, 2, · · · , n Step 3:[ pbest
とgbest
の更新]
各
Particle
のもつ最良解情報pbest
とParticle
全体が共有している最良解情報gbest
を以下の式で更新する。I
1= { i | f (x
k+1i) < f (pbest
ki), i = 1, 2, · · · , m }
とし,
pbest
k+1i= x
ki+1, i ∈ I pbest
ki+1= pbest
ki, i ∈ I gbest
k+1= pbest
k+1igとおく。ただし,
i
g= arg min
i
f(pbest
k+1i) Step 4:[
パラメータα
の設定]
f(pbest
k+1ig) ≥ f(pbest
k+1)
であれば,α
ki= 0, i = 1, 2, · · · , m
とする。さもなければ,g
ig= g
ig+ 1
I
2= { i | g
i< g
ig, i = i
g, i = 1, 2, · · · , m } α
ki= 0, i = ∈ / I
2α
ki= 1/T
max, i = ∈ I
2 とする。Step 5:[
パラメータc
1とc
2の更新] c
k+11i= c
k1i+ α
ik(cbest
k1− c
k1i) c
k+12i= c
k2i+ α
ik(cbest
k2− c
k2i) Step 6:[
終了判定]
k = T
maxならば終了。さもなければk = k + 1
としてStep 2
へ行く。1
arg min
は,最小値を実現する変数値を表す第
3
章 システムの構成要素18
3.1.2
モデリング手法シミュレータ負荷が重い場合に用いるモデリング手法では,
Radial Basis Function Net- work
(RBFN
)を用いた。RBFN
は3
層型のフィードフォワード型ニューラルネットワー クの一種である。RBFN
では基底関数としてガウス分布を用いており,その重ね合わせに より多峰性の複雑な応答曲面を生成することができる。中間素子数をm
,中間層と出力層 の重みをω
j(j = 1, . . . , m)
ネットワークの出力をO(x)
とすると,ネットワークの出力は 以下の式で与えられる。O(x) =
mj=1
w
jh
j(x) (3.6)
上式
(3.6)
において,h
j(x) (j = 1, 2, 3, · · · , m)
は基底関数を表し,一般に中間層の非線形 出力関数には次式のガウス分布関数が用いられている。h
j(x) = exp( − (x − x
j)
T(x − x
j)
r
2j) (3.7)
式
(3.7)
において,x
jとr
jはそれぞれj
番目の基底関数の中心と半径である。次に
RBFN
ネットワークにおける学習に焦点を当てる。学習用データx
jにおける教師 値y
j(j = 1, 2, 3, . . . , p)
とネットワークの出力値O(x
j)(j = 1, 2, 3, . . . , p)
との差の2
乗和 を加え,さらに一部の素子だけが過剰に反応するのを避け,ノイズの影響をできる限り小 さくするため重み係数w
j(j = 1, 2, 3, · · · , p)
に対する抑制項を加えた次式で定義されるエ ネルギーE
を最小にする。E =
pi=1
(y
i− O(x
i))
2+
mj=1
λ
jw
j2(3.8)
上式
(3.8)
においてλ
iはWeight Decay
と呼ばれるパラメータであり,λ
j= 10 × 10
−2程度 の小さな値が推奨されている。本研究ではこの値を用いた。RBFN
の学習とは,上式(3.8)
のエネルギーE
を最小とするような重みベクトルw = (w
1, w
2, · · · , m)
Tを決定すること である。ここで次の行列を定義する。
H =
⎡
⎢ ⎣
h
1(x
1) · · · h
m(x
1) .. . . .. .. . h
1(x
p) · · · h
m(x
p)
⎤
⎥ ⎦ (3.9)
第
3
章 システムの構成要素19
Λ =
⎡
⎢ ⎢
⎢ ⎣
λ
10 · · · 0 0 λ
2· · · 0 .. . .. . . .. .. . 0 0 · · · λ
m⎤
⎥ ⎥
⎥ ⎦ (3.10)
y = (y
1, y
2, · · · , y
p)
T(3.11)
式
(3.8)
のエネルギー最小化により,最終的に重みベクトルω
は,w = (H
TH + Λ)H
Ty (3.12)
とあらわすことができる。さらに上式
(3.12)
において,A = H
TH + Λ (3.13)
とおけば,
RBFN
の学習はA
−1を求めることに帰着される。このように
RBFN
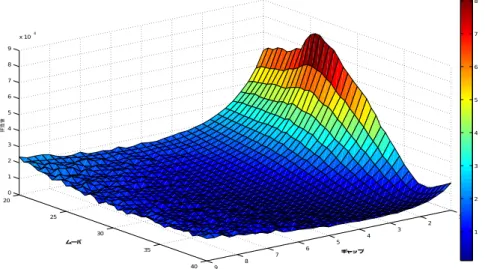
では基底関数の中心と半径を固定することにより,逆行列を求める問 題に帰着できるので,学習が非常に速いという特徴を有している。図3.3
に元の関数の形 状,図3.4
にサンプル点500
点の時,RBFN
によりフィッテングを行った形状を示す。図
3.3
: 元の関数形状 図3.4
: サンプル点500
点の時,RBFN
によりフィッティングした形状第
3
章 システムの構成要素20
図
3.3
,図3.4
から,関数形状がほぼ一致しており,RBFN
によるフィッティングの精度 が高いことが分かる。基底関数の半径
基底関数の半径は応答曲面の精度に影響を与える重要なパラメータである。基底関数に 一律な半径を与える方法がいくつか提案されており,代表的な式として以下の
2
つの式が ある。r = d
max√
nmn (3.14)
r = d
max√ n √
nm (3.15)
このとき,
d
maxはサンプル点間の最大距離,n
は次元数を表す。数値実験により,2
次元 の場合においては式(3.14)
は精度が高いが,高次元になると式(3.15)
の方が精度が高いこ とが知られている[11
][12
][13
]。本研究では,次元数が2
次元の場合においては式(3.14)
,3
次元以上においては式(3.15)
を用いることにする。3.1.3
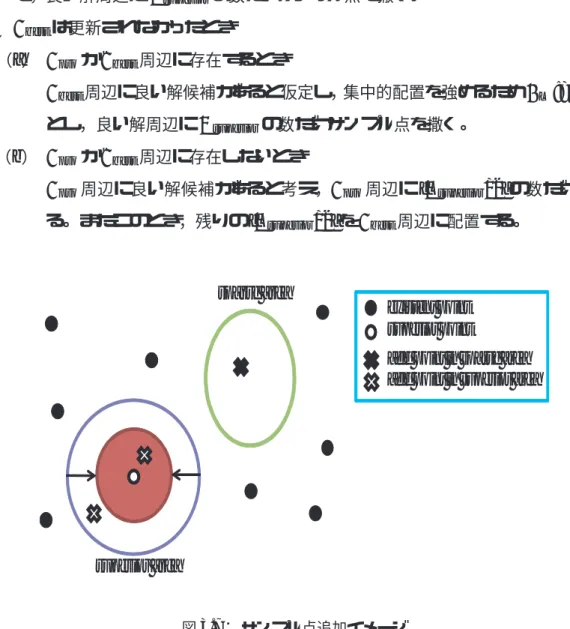
サンプル点配置の方法シミュレータ負荷が重い場合において,サンプル点の配置方法は重要な要素となってく る。少ない数のサンプル点で高い精度のモデリングを行うことが可能となれば,より少な い計算時間で最適化を行うことが可能となる。本研究におけるサンプル点の追加方針は,
以下の
2
点とした。•
最適解周辺の近似精度向上のため,良い解周辺にサンプル点を配置する。•
局所解に陥ることを防ぐため,疎な領域にサンプル点を配置し全体をモデリング する。探索前半は広範囲の探索を狙い,全体のモデリングを行うために疎な領域へのサンプル点 配置の割合を多くし,探索後半は良い解周辺の集中的探索をするため,良い解周辺へのサ ンプル点配置の割合を多くした。
第
3
章 システムの構成要素21
サンプル点の配置方法上記の指針をもとにサンプル点の配置を行った。一回に追加するサンプル点数を
N
add,疎 な領域に追加するサンプル点数をN
sparse,良い解周辺に追加するサンプル点数をN
superior, サンプル点を追加する総回数をC
total,サンプル点を追加した回数をC
とすると,関係式 は以下の式(3.16)
,式(3.17)
のように表す。ただし[ ]
はガウス記号を表す。N
add= N
superior+ N
sparse+ 1 (3.16)
N
sparse=
1 − C C
totalN
add+ 0.5
(3.17)
式
(3.16)
においての末尾項の1
は,応答曲面により得られた最適解である。また,疎な領域及び良い解周辺を以下のように定義した。
•
疎な領域–
総距離による判定実行可能な領域内にランダムに多く点を撒き,撒かれた点と全ての既存のサン プル点との総距離を計算し,その中で総距離が最も大きい点を疎な領域の点と する。
–
混雑距離による判定各次元において,領域の端点を含めた全ての点における混雑距離を計算し,そ の中で最も混雑距離の大きい区間の中点をその次元の成分とする。その操作を 次元ごとに行い,生成された点を疎な領域の点とする。
総距離による判定,及び混雑距離による判定のイメージを図
3.5,3.6
に示す。本研究 においては,総距離による判定・混雑距離による判定を交互に行った。•
良い解周辺良い解周辺は探索過程で得られた最も良い解周辺とした。なお,探索序盤は広範囲 の探索,探索終盤は最適解周辺の集中的な探索を狙い,以下の式
(3.18)
,式(3.19)
により良い解周辺のサンプル点配置を行った。このとき,rand
は0
から1
の間の一 様乱数,C
Lは集中的探索に度合いを定量的に扱う変数,変数の上限値をx
max,下 限値をx
min,x
addは良い解周辺に配置するサンプル点とした。第
3
章 システムの構成要素22 Ar
x= x
max− x
minC
L(3.18)
x
add= x + 2rand() · Ar
x− Ar
x(3.19)
図
3.5
: 総距離による疎な領域判定のイメージ図