放射音を用いた、衝撃力及び衝撃位置の同時同定
A Simultaneous Identification of the Impact Position and the Impact Force by Using Acoustic Response
精密工学専攻 6号 伊藤 康司
Yasushi Ito
1. 緒言
物体の破損に関係する衝撃力を測定することは重要であ り,これまでに衝撃力を同定する研究が多数報告されている.
例えば,井上ら(1)~(3)は衝撃力が加えられた弾性体に生じるひ ずみ応答を用いて衝撃力の同定を行っている.
一方,衝撃力により放射される衝撃音には,その衝撃力の 情報が含まれているはずである.放射音の測定による衝撃力 の同定が出来れば,衝撃体や被衝撃体から離れた位置に置い た測定素子による非接触測定が可能である.辻ら(4)により,
衝撃力と放射音との伝達関数を用いて,測定した放射音より 衝撃力を同定する研究が報告されている.この方法では,
FEM
解析により求めた任意の衝撃力に対する音圧のシミュ レーション値を基に,未知係数を用いて未知の衝撃力と音圧 を級数表示する.この未知の音圧と測定した音圧を用いて,最小二乗法により未知係数を決定し,衝撃力を同定している.
そのため,衝撃力と放射音との伝達関数を求める予備実験を 行う必要がないが,FEM 解析により衝撃力と放射音との関 連性を求める際に衝突した位置の情報が必要である.しかし,
正確な衝撃位置の測定が測定時に得られない場合も多い.辻 ら(5)は,二本のマイクロフォンの情報を用いて,衝撃位置を 同定する試みを行っている.しかし,この方法では,二本の マイクロフォンを結ぶ軸上に衝撃体が衝突した場合の位置 の同定,すなわち一軸上の位置のみの同定に限られていた.
そこで本研究では,先の方法の改良を行い,複数のマイク ロフォンから得られた放射音圧の時間変化と
FEM
解析を併 用して,衝撃力のみならず,衝撃位置の同定を同時に行う手 法を提案する.そして,実際の衝撃実験において,提案して いる手法により,衝撃位置と衝撃力の時間変化の同時同定が 十分可能であることを示し,本手法の有効性を明らかにする.2. 複数のマイクロフォンによる同定原理
平面に衝撃荷重が加わる問題を考える.上面に (x,
y)座標
を取る.実際の衝撃位置を(Xexp,Y
exp),衝突した位置だと予想
される任意の衝撃位置を(Xsim,Y
sim)とする.この位置に既知の
衝撃圧力の時間変化p
sim(t)を与え,FEM
解析を行い,衝撃音 圧の応答を得る.任意の衝撃圧力の時間変化
p(t)は p
sim(t)の重ね合わせによ
り式(1)のような未知係数A
nで表すことが出来る.
Nn
n sim
n
p t t
A t p
1
) ( )
( (1)
ここで,tn
= Δt×(n-1),Δt
は時間刻みである.p
sim(t)が加わったときの,音圧の時間変化を FEM
解析を用いて求める.そのときのマイクロフォンを設置した位置にお ける音圧の
FEM
解析による数値解析値をS
sim(i)( t )
で表す.こ こで,i はマイクロフォンの設置場所を示す番号である.衝 撃圧力と衝撃音圧の間には線形関係がある.すなわち,衝撃 圧力がA
n倍となった場合,衝撃音圧もA
n倍となる.したが って,式(1)で表される衝撃圧力p(t)に対する衝撃音圧の時間
変化S(i)(t)は,Ssim(i)(t)を用いて以下のように表される.
Nn
n i sim n
i
t A S t t
S
1 ) ( )
(
( ) ( ) (2)
辻ら(5)の手法では,Anの決定に一本のマイクロフォンのデ ータのみを用い,衝撃位置の決定には別のマイクロフォンの データを用いていた.本手法では,
A
nと衝撃位置の決定に全 てのマイクロフォンのデータを用いて行う手法を提案する.そのために,実際に測定されたマイクロフォン
i
の音圧の時 間変化S
ex p(i)( t )
と式(2)の解析音圧の差の二乗平均を以下のよ うに,i=1~M 本の全てのマイクロフォンのデータを用いて 表す.
2
1 1
) ( exp )
( 2
1 1
) 2 ( exp ) ( 2 2
max max
) ' ( ) ' 1 (
) ' ( ) ' 1 (
M
k i
K
k N
n
k i n k i sim n M
i K
k
k i k i r
t S t t S M A
t S t M S
E
(3)
ここで,t’k
(k=1,2,...K
max)は音圧を測定した時刻,K
maxは測定 時刻の総数,Mはマイクロフォンの本数である.最小二乗法 によれば,Anは次の連立一次方程式の解として得られる.
M
i K
k
m k i sim k i
n N
n M
i K
k
m k i sim n k i sim
N m t t S t S
A t t S t t S
1 1
) ( ) ( exp
1 1
max
1
) ( ) (
) ,...
2 , 1 ( ) ' ( ) ' (
) ' ( ) ' (
max
(4)
ここで,FEM 解析による数値解析値Ssim(i)(t)は,衝撃位置
(X
sim,Y
sim)の関数でもあるが,これらのパラメーターを式(4)
と同様な形で最小二乗法により連立一次方程式に帰着させ て求めることは困難である.そこで,繰り返し計算により,
式(3)を最小とする衝撃位置(Xsim
,Y
sim)の値を求める. Fig.1
に,衝撃時の音圧測定から,衝撃位置,衝撃力の時間変化の同定 までのフローチャートを示す.衝撃位置(Xsim
,Y
sim)を変化させ
てE
rを計算し,E
rを最小にする(Xsim,Y
sim)を繰り返し計算を行
うことにより求め,同定値とする.そして,これらの値より 衝撃力の時間変化を求める.Fig.1 Flow chart to obtain impact force.
3. 実験方法
3.1 衝撃実験装置
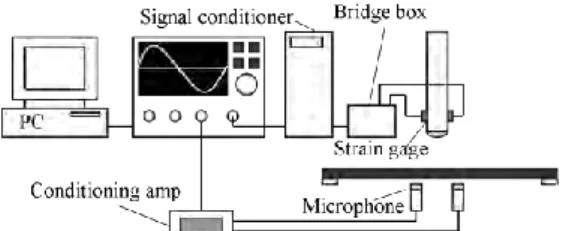
Fig.2
に測定システムの概略を示す.使用したマイクロフォンは,Bruel&Kjaer 社製の
Type4190(直径 12.7mm,長さ
17.6mm)で,測定可能な音圧変化の周波数帯域は 3〜20kHz
であり,各周波数に対して更正された音圧値が電圧として出
力される.辻らの報告(4)によるとマイクロフォンは,前面が キャップで保護された構造となっているため,実際の音圧の 測定素子はマイクロフォンの表面から
5mm
内側に入ってい ると推定されている.マイクロフォンの測定位置は,この位 置を実際の位置としている.また衝撃体側面に貼り付けたひずみゲージにより,ひずみ データも同時に記録する.このデータより衝撃力を算出し,
同定により得られた結果と比較し,衝撃力の同定結果の有効 性を検討する.全てのデータは
PC
により処理を行う.Fig.2 The Measuring System of the sound and the strain.
Fig.3 The configuration of the impact bar and aluminum plate.
Fig.4 The configuration of the impact bar and aluminum concave block.
Fig.3,Fig.4
に衝撃体および被衝撃体の詳細形状を示す.衝撃体として,アルミニウム丸棒を,被衝撃体として先の研 究から用いられているアルミニウム平板に加え,凹型ブロッ クを用いている.丸棒の先端側面は丸めてあり,先端は直径
10mm
の円形平面となっている.被衝撃体は下に厚さ5mm,
一辺
20mm
の正方形方のシリコンラバーシートを設置する ことにより支持している.これは,被衝撃体に外乱の力を作 用させず,なるべく自由に振動させるためである.リニアブ ッシュをガイドとして,丸棒を高さH=30mm
から自由落下 させることにより衝撃を加える.衝撃位置はFig.3,Fig.4
の ように中心を原点とし,(Xexp,Y
exp)で表す.丸棒の先端から 20mm
の位置にひずみゲージを貼り,衝撃体に生じるひずみ 変化から衝撃力を測定する.この測定は衝撃力の同定の精度 確認のために用いる.3.2 衝撃力の測定
衝撃棒の断面内の応力分布が一様であると仮定すれば,衝 撃棒断面に加わる力の時間変化
P
exp(t)
は,衝撃棒に貼付け た半導体ゲージより得られたひずみの時間変化ε
bar(t)
より 次のように与えられる.2 exp
( t ) E
bar bar( t ) 4 d
barP (5)
ここで,Ebar,
d
bar はそれぞれ,衝撃棒の縦弾弾性係数と直 径である.本研究では,この値が板上面に加わる衝撃力の時 間変化とほぼ等しいと考え,衝撃力の直接測定値として用い ている.4. FEM 解析
4.1 シミュレーションモデルの概要
有限要素法解析ソフト
ANSYS
を用いてFEM
解析を行う.Fig.5,Fig.6
に平板及び凹型ブロックのシミュレーションモデルを,Table 1,
Table 2
に平板,凹型ブロック及び空気のそ れぞれの機械的性質等を示す.被衝撃体の下方を取り囲むよ うに空気層を配置し,構造と気体(音響)の連成解析を行う.空気層側面および下面において音波は反射されるので,この 部分の境界条件は実際と異なる条件となっている.しかし,
衝 撃 時 刻 か ら
0.5ms
の と き の 空 気 中 の 音 波 の 到 達 距 離173mm
であり,この距離は,被衝撃体から放射された音波が境界に反射して戻る距離より十分大きく空気層を作成し ているため,測定時間
0.5ms
においては,音圧の計測位置に おける反射音の影響は尐ないと考えられる.被衝撃体の境界 条件はシリコンラバーシートの上に設置しているため複雑 であるが,被衝撃体の影響が表れるのは0.35ms
以降である ことが確認されている(4).これにより,衝突初期の短い時間 内であれば,被衝撃体の境界条件の影響が無視できると考え られる.したがって,被衝撃体には拘束条件を与えないもの とする.被衝撃体にはFig.7
に示されるような,滑らかに立 ち上がる単位ステップ状の関数を加える.立ち上がり時間は0.1ms,最大圧力は 1MPa
である.Fig.5 The configuration of the simulation model of the plate and the air.
Fig.6 The configuration of the simulation model of the concave block and the air.
Table 1 The mechanical properties of the aluminum plate and concave block for the FEM analysis.
Material Aluminum
Young’s modulus 70 GPa Poisson's ratio 0.34
Density 2700 kg/m
3Table 2 The mechanical properties of air for the FEM analysis.
Material Air
Acoustic velocity 346 m/s
Density 1.3 kg/m
3Fig.7 The time dependence of the pressure as the input for the FEMsimulation.
5. 衝撃位置と衝撃力の同時同定
5.1 平板での衝撃位置及び衝撃力の同定
アルミニウムの平板を被衝撃体として用い,衝撃位置及び 衝撃力の同時同定を行う.Fig.3 のように,三本のマイクロ フォンを平板下から
h=10mm
に設置した.ここで,各マイク ロフォンを,Mic.1,Mic.2,Mic.3 と表す.各々のマイクロ フォンの水平位置はMic.1(-30,0),Mic.2(30,0),Mic.3(-30,
-50)[mm]である.衝撃棒を自由落下させることで,衝撃位置 (-40,-40)[mm]に衝撃を加える.各々のマイクロフォンにより
測定された音圧の時間変化をFig.8
に示す.Mic.3
が最も衝撃 位置に近いことから,最初に立ち上がり,ついでMic.1
が立 ち上がる.Mic.2は他の二本のマイクロフォンに比べ衝撃位 置から遠いため,かなり遅れて立ち上がり,音圧の最大値も 低くなっている.Fig.8 The time dependence of the measured sound pressure from the three microphones which are placed at (-30,0),(30,0),
(-30,-50)[mm]. The impact position is (-40,-40)[mm].
二本のマイクロフォンのデータから衝撃位置の同定を行 う.
Fig.9
にMic.1(-30,0)[mm]と Mic.2(30,0)[mm]のデータを用
いて求めた,シミュレーションで与えた衝撃位置(Xsim,Y
sim)と E
rの関係を示す.Mic.1とMic.2
は,被衝撃体のx
軸上直下 に配置してあるため,得られたE
rの分布はx
軸に対して対称 になっている.そのため,極小値はx
軸に対して対称の位置の二箇所に表れている.従って,Mic.1,Mic.2の二本のマイ クロフォンからでは,鏡像の位置のどちらに真の衝撃位置が あるかを特定することは出来ず,
E
rを最小にする同定位置は(-45,40), (-45,-40)[mm]と二箇所得られる.この位置を衝撃位
置としたとき,同定された衝撃力の時間変化を
Fig.10
に示す.同時にひずみゲージによる測定値も示してある.同定値は,
ほぼ測定値と一致し,衝撃位置を決定することはできないが,
衝撃力の時間変化は同定出来ることが分かる.
Fig.11
にMic.1(-30,0)[mm]と Mic.3(-30,-50)[mm]を用いた場
合の,E
rの分布を示す.Mic.1, Mic.2
を用いた場合と同様に,E
rの分布はMic.1
とMic.3
を結ぶ直線(x=-30mm)を中心軸としてほぼ対称となり,(-50,-35)と(0,-35)[mm]の二箇所で極小 値を取り,衝撃位置を特定することができない.Fig.12にこ れら二箇所それぞれの衝撃位置の同定値とした場合の衝撃 力 の 時 間 変 化 を 示 す . 同 定 位 置 が , 実 際 の 衝 撃 位 置
(-40,-40)[mm]に対してずれてしまっていることから,衝撃力
の同定値は,直接測定による結果と異なる結果となっている.Fig.13
にMic.2
とMic.3
を用いた場合のE
rの分布を示す.Mic.1,2
あるいは,Mic.1,3と異なり極小値は(-45,-40)[mm]に おける一つのみであり,この位置が衝撃位置の同定値と求め られ,実際の衝撃位置(-40,-40)[mm]とほぼ一致している.また
Fig.14
より,このときの衝撃力の時間変化は,直接測定した値とほぼ等しい.Mic.2,3 のデータを用いた際のみ衝撃位 置が決定できる理由としては,Mic.2,3 の線上で実際の衝撃 位置(-40,-40)[mm]と対称となる位置(-22.0,-61.6)[mm]が平板 の 端 部 分 で あ っ た こ と が 考 え ら れ る . 実 際 の 衝 撃 位 置
(-40,-40)[mm]よりも鏡像位置(-22.0,-61.6)[mm]の方が平板側
面からの反射の影響が早く出るため,差が生じFig.13
のよう にE
rの最小値が一意に決まり,衝撃位置が求められる.Fig.16 Time dependence of the impact pressure.
Fig.15 Distribution of the E
r.
Fig.14 Time dependence of the impact pressure.
Fig.13 Distribution of the E
r.
Fig.12 Time dependence of the impact pressure.
Fig.11 Distribution of the E
r.
Fig.10 Time dependence of the impact pressure.
Fig.9 Distribution of the E
r.
三本のマイクロフォン全てのデータを用いた際の
E
rの分布を
Fig.15
に示す.E
rの分布は一つの極小値しかなく,一意的に衝撃位置を特定できる.(Xsim
,Y
sim)=(-45,-40)[mm]で E
rは 最小値を取り,このときの衝撃力の時間変化をFig.16
に示す.両者はほぼ等しく,衝撃力の時間変化と衝撃位置が同時に同 定出来ることが確認された.二本のマイクロフォンにより得 られた同定値と比べても,三本のマイクロフォンのデータを 用いた衝撃力の同定値の方が実測値に近く,三本のマイクロ フォンのデータを同時に使うことにより,高い同定精度が得 られることが分る.
5.2 凹型ブロックでの衝撃位置及び衝撃力の同定
アルミニウムの凹型ブロックを被衝撃体として用い,衝撃 位置及び衝撃力の同時同定を行う.Fig.4 のように,三本の マイクロフォンを平板下から
h=10mm
に設置した.ここで,各マイクロフォンを,Mic.1,Mic.2,Mic.3 と表す.各々の マイクロフォンの水平位置は
Mic.1(-30,0),Mic.2(30,0),
Mic.3(-30, -50)[mm]である.衝撃棒を自由落下させることで,
衝撃位置(-40,40)[mm]に衝撃を加える.
三本のマイクロフォン全てのデータを用いた際の
E
rの分布を
Fig.17
に示す.E
rの分布は平板同様,マイクロフォンを三 本 用 い る こ と で 一 つ の 極 小 値 と な り , 衝 撃 位 置 を
(X
sim,Y
sim)=(-45,-45)[mm]と特定出来る.このときの衝撃力の時
間変化を
Fig.18
に示す.両者はほぼ等しく,凹型ブロックのように放射音に反射の影響が加わるような場合でも衝撃位 置及び衝撃力の時間変化を同時に同定出来ることを確認し た.
6. 最急降下法による効率化
FEM
解析を用いることにより衝撃位置と衝撃力を同時に 同定出来ることを確認出来た.しかし本手法では衝撃位置を 変化させた解析を多数行うため,衝撃力同定を行うまで多大 な時間がかかる.そこで最急降下方を用いることにより,尐 ない解析数で衝撃位置を同定する手法を提案する.最急降下 方とは最適化問題に対する反復法であり,ある点における,負の勾配方向で関数を最小化することによって次の点を探 す手法である.本手法で用いる場合,まず探索を開始する点
(X
1,Y
1)を決め,x,y
軸でその前後となる点を含めた五点で解析を行い,Erを求める.そして
x,y
方向でそれぞれ比較を 行い,負の勾配方向にステップ幅S
移動させ,その点(X2,Y
2)
で同様の比較を行う.これを繰り返し,中心の点が最小にな ったとき,その点(XN,Y
N)が E
rの分布全体での極小値となり,衝撃位置と特定出来る.前述の平板での衝撃実験での結果を 用いて,(X1
,Y
1)=(90,60)[mm],ステップ幅 S=40mm
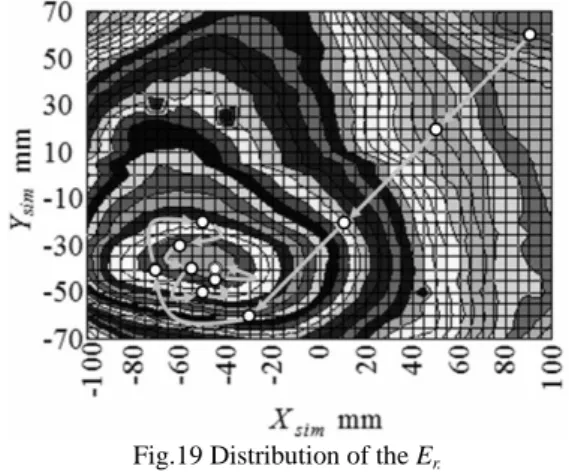
で衝撃位 置探索を行った結果をFig.19
に示す.また衝撃位置を同定す るまでに辿った探索点をTable 3
に示す.最適なステップ幅 を用いて,この手法を使った場合,解析数を数十分の一にす る こ と が 出 来 る . し か し ,Fig.19
の(Xsim,Y
sim)=(-25,-40),
(30,70)[mm]のような E
rが最小値ではない極値を特定する場合もある.
Fig.19 Distribution of the E
r.Table 3 The route to identify the impact position.
X
1,Y
190,60 X
5,Y
5-70,-40 X
9,Y
9-50,-50 X
2,Y
250,20 X
6,Y
6-50,-20 X
10,Y
10-45,-45 X
3,Y
310,-20 X
7,Y
7-60,-30 X
11,Y
11-45,-40 X
4,Y
4-30,-60 X
8,Y
8-55,-40 7. 結論
FEM
解析により求めた衝撃力と放射音との関連性を利用 して,複数のマイクロフォンにより測定した放射音のみを用 いて,衝撃位置と衝撃力の時間変化を同時同定する手法を提 案した.種々の実験を行い,放射音を用いて,衝撃位置及び 衝撃力の時間変化を同時同定することが十分可能であるこ とを確認した.以下に,本研究により得られた結果を示す.(1)
二本のマイクロフォンを使ったとき,二本のマイクロフ ォンを結ぶ直線と鏡像位置にある二箇所の衝撃位置を 特定することが出来ない場合がある.(2)
三本以上のマイクロフォンを使うことにより,衝撃位置 と衝撃力の時間変化を同時同定出来る.(3)
平板のみでなく,反射の影響がある凹型ブロックにおい ても,三本以上のマイクロフォンにより衝撃位置と衝撃 力の時間変化を同時同定出来る.(4)
最急降下法を用いることにより,より効率的に衝撃位置 を決定することが出来る.参考文献
(1) 井上
裕嗣,岸本 喜久雄,渋谷 寿一,小泉 尭,逆解析による衝撃荷重の推定,逆解析のための最適伝達関数, 日本機械学会論文集.A編,57-543
(1991) pp.2727-2734.
(2) 井上
裕嗣,石田 宏之,岸本 喜久雄,渋谷 寿一,逆解析手法を用いた衝撃荷重の測定,伝達関数の推定法の比 較検討と計装化シャルピー衝撃試験への応用,日本機械 学会論文集.A編,57-534
(1991) pp.424-429.
(3) 井上
裕嗣,池田 直人,岸本 喜久雄,渋谷 寿一,小泉 尭,衝撃力の大きさと方向の逆問題解析,日本機械学会論文 集.A編,59-559
(1993) pp.572-579.
(4) 辻
知章,栗本 貴文,渋谷 寿一,FEM
解析を併用した放射音圧測定による平板の衝撃力の同定,日本機械学会論 文集.A編,74-742