卒業研究論文
マルチエージェントモデルを用いた 避難行動のシミュレーション
学籍番号
01D8104038C
押野 麻由子
中央大学理工学部情報工学科 田口研究室
2005
年3
月あらまし
本研究では
,
マルチエージェントモデルを用いて,
災害時における人間の心理や行動 特性を考慮に入れた避難行動のシミュレーションを行う.
災害時の人間の避難志向に 着目し, シミュレーション上の避難者の属性に組み込む要素を決定した. 避難志向と周 囲の情報を元に,
移動方向と移動距離を決定し,
避難者の行動を表現する.
また,
火災 発生時を想定し,
異なる条件下におけるシミュレーションを行い,
避難者の行動の変化 について調べ,
考察する.
シミュレーションの実行結果を元に,
改善策を考案し,
より 安全な避難方法を提案する.
キーワード:マルチエージェントモデル
,
災害時における人間の心理と行動特性,
避難 行動のシミュレーション,
避難計画目次
第
1
章 はじめに... 1第
2
章マルチエージェントモデル
... 2
2.1
マルチエージェントモデルとは... 2
2.2
マルチエージェントシミュレータ(MAS)
概要... 3
第
3
章避難行動のシミュレーション
... 8
3.1 災害時における人間の行動特性 ...8
3.1.1
避難の見切り... 8
3.1.2
避難志向... 9
3.1.3
群衆行動... 10
3.2 シミュレータ上における避難行動のモデル化 ...11
3.2.1 空間の設定...11
3.2.2
避難者エージェントのルール設定... 13
3.2.3
改札・出口付近の避難者エージェントのルール設定... 21
3.2.4
火エージェントのルール設定... 22
3.3 シミュレーションの実行 ...23
3.3.1
シミュレーション方法... 23
3.3.2
実行結果... 23
第
4
章異なる条件下における検証
... 26
4.1
シミュレーションの設定... 26
4.2
実行結果... 27
4.2.1
条件1
および条件2
のシミュレーション実行結果... 27
4.2.2
条件3
および条件4
のシミュレーション実行結果... 28
4.2.3
条件5
および条件6
のシミュレーション実行結果... 30
4.2.4
条件7
および条件8
のシミュレーション実行結果... 32
4.3
改善策を考慮したシミュレーションの実行... 35
4.3.1
結果の考察... 35
4.3.2
改善策とシミュレーションの設定... 36
4.3.3
条件9
および条件10
のシミュレーション実行結果... 37
4.4
考察... 39
第
5
章 おわりに... 40
謝辞
... 41
参考文献
... 42
第1章 はじめに
日本は世界でも有数の災害大国である
.
これは,
地震や台風などの自然災害の発生率 が高いために言われていることであるが,
被害が拡大する要因として,
震災後の火の不 始末による火災や,
不適切な避難行動による群集なだれなど,
人為的ミスによる二次災 害の発生が挙げられる.
また,
災害が発生した時,
避難行動が的確に行われなければ,
さらに被害は拡大し,
多数の死傷者を出す大惨事につながってしまうこともある.
災害の発生を未然に防ぐことが出来れば理想的であるが
,
自然災害の発生は予測不 可能であり,
人為的ミスによる被害の拡大を完全に防ぐことも困難である.
そのため,
被害を最小限に抑えるには,
万が一災害に直面したときに,
冷静に対処し,
円滑な避難 が行えるよう,
適切な避難誘導と事前の避難計画が必要である.
本研究では
,
マルチエージェントモデルを用いて,
災害時における人間の心理と行動 特性を考慮した避難行動をモデル化し,
火災発生時を想定したシミュレーションを行 う.
異なる条件を与えてシミュレーションを実行し,
その結果を元に,
より安全で効率 的な避難計画を提案することを目的とする.
第2章 マルチエージェントモデル
2.1
マルチエージェントモデルとはマルチエージェントモデル
各々の内部属性に関連付けられた独自の意思決定メカニズムと行動計画に基づき
,
自立的に行動する活動主体のことをエージェント,
そしてそれらが相互関係をもつ集 合体のことをマルチエージェントという.
独立したルールを持つ複数のエージェントが
,
相互作用を及ぼすことによって,
シス テム全体の流れが生まれ,
また,
その全体の流れによってエージェントの個々の動きが 動的に変化し,
決定される.
この循環プロセスによってシステム全体の動きを表現する モデルのことをマルチエージェントモデルという.
マルチエージェントモデルの特性
マルチエージェントモデルの基本的な特性として以下の4項目があげられる
.
1.
自立性エージェントは人間などの直接的介入なしに動作し
,
自身の行動や内部状態を制御 することができる.
2.
社会性何らかの言語を介して他のエージェントや人間と情報交換することができる
.
3.
反応性エージェント自身が自分自身の置かれた環境を認知し
,
その変化に対して適切に応 答することができる.
4.
自発性外部環境に対して単純な反応だけでなく
,
目標を持った自発的な行動を起こすこと ができる.
すなわち
,
エージェントモデルではエージェント自身が環境を認知し,
自律的に自分 自身を環境に対応させるように変化し,
加えて,
他のエージェントとも情報交換を行い,
目標を達成するためによりよい行動を自分自身で計画し,
実現することができる,
とい う特性を持っている.
2.2
マルチエージェントシミュレータ(MAS
)概要マルチエージェントシミュレータ
(MAS)
は,
マルチエージェントシステムを容易に 構築しシミュレートするために,
構造計画研究所が開発したソフトウェアである.
個々 の活動主体のルールとは違った,
集団内部に働く目に見えないメカニズムを決定し,
シ ミュレートすることでシステムの全体像をつかむことができる. MAS
の実行ルールに 使用されている記述言語は,
基本的にはMicrosoft
のVisualBasic
に沿ったものである.
1)
MAS
の特徴• MAS
のプログラム構成は,
階層構造であり,
最上位にはWorld
エージェントが存在する
. World
の下階層に「空間」や「エージェント」,
「変数」を配置し,
シミュレーションを構成している
.
•
マルチエージェントシミュレーションを行うために必要な関数がいくつか用意さ れており,
エージェントの配置や移動,
コレクションの取得などを容易に行うこと ができる.
•
エージェントのルールは関数の集まりで記述される.
シミュレーションの実行に 際して,
エージェント生成時に1度だけ実行され,
各エージェントに対して初期値 を与える関数Agt_Init
と,
ステップ毎にシミュレーションが終了するまで繰り返 し実行される関数Agt_Step
とに分かれている.
その他の関数は必要に応じてユー ザ自身が自由に定義することができる.
•
記述ルールには,
「エージェントルール」と「共通ルール」がある.
「エージェントル ール」は該当エージェントのみ参照可能であり,
「共通ルール」は全てのエージェン トが参照可能である.
•
二次元表示マップや数値出力によって,
エージェントの動作を視覚的に捉えるこ とができる.
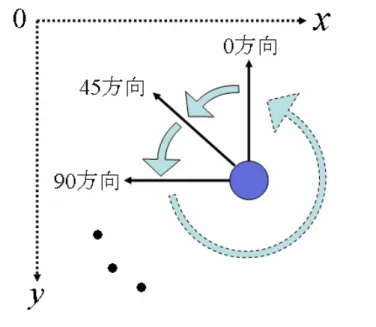
2) MAS
の仕様a)
空間の定義とDirection
の定義MAS
の空間の仕様とDirection
を図2.1
に示す.
MAS
の空間は二次元の座標空間で定義されており,
左上端をx = 0 ,
とし,
右 方向が= 0 y + x
方向,
下方向が+ y
方向である.
Direction
はエージェントの向きを表す変数であり, − y
方向を0
とし,
反時計回りに増加し
, 0
から360
までの方向が定義されている.
図
2.1
空間の仕様とDirection
b)
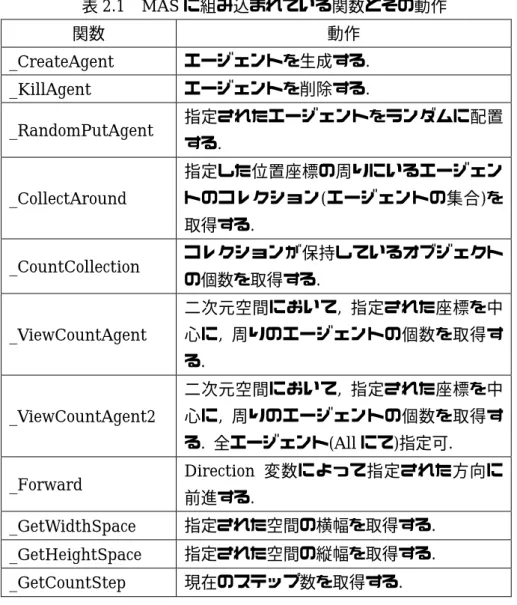
組み込み関数表
2.1
は,
本研究において,
シミュレーションに用いた組み込み関数の一覧である.
_CreateAgent
は,
指定したエージェントを生成する関数である.
例えば, 0
以上1
未満の乱数値を求めるランダム関数を用いて
,
その値がある値以下ならばエージェント を生成する,
などの操作を行うことができる.
_KillAgent
は,
指定したエージェントを削除する関数である.
出口に到達した避難者エージェントは脱出に成功したエージェントとみなし
,
この関数を用いて削除した.
_RandomPutAgent
は,
指定したエージェントを空間内にランダムに配置する関数である
.
他のエージェント(
壁や他の避難エージェント)
と重らないように,
初期の避難 エージェントはこの関数を用いてランダムに配置されている.
_CollectAround
は,
指定した位置座標の周りにいるエージェントのコレクションを取得する関数である
.
この関数は 座標,
座標,
視野,
空間名,
エージェント名を引 数に取る関数であり,
ある特定の座標を中心に,
指定したセル数だけ離れた範囲内にあ る指定した種類のエージェントの集合を取得する.
この関数を用いて避難者エージェ ントの位置座標を中心に,
視野内の出口を取得し,
避難者エージェントから出口までの 距離を算出した.
図2.2
は, _CollectAround
の引数の1
つである「視野」についての説 明である.
図中の数字は, 0
を中心としたときの,
中心からの距離を表し,
この値を視野 という.
視野が0
であれば中心のみ,
視野が1
であれば図の「0
」「1
」の部分を指定で きる.
視野を2
とした場合は,
図の「0
」「1
」「2
」の部分,
つまり図2.2
の網掛け部分の 範囲を指定することができ,
この範囲内に含まれるエージェントの集合を取得するこ とができる.
x y
表
2.1
MAS
に組み込まれている関数とその動作関数 動作
_CreateAgent
エージェントを生成する.
_KillAgent
エージェントを削除する.
_RandomPutAgent
指定されたエージェントをランダムに配置する
.
_CollectAround
指定した位置座標の周りにいるエージェン トのコレクション
(
エージェントの集合)
を 取得する.
_CountCollection
コレクションが保持しているオブジェクトの個数を取得する
.
_ViewCountAgent
二次元空間において
,
指定された座標を中 心に,
周りのエージェントの個数を取得す る.
_ViewCountAgent2
二次元空間において
,
指定された座標を中 心に,
周りのエージェントの個数を取得す る.
全エージェント(All
にて)
指定可.
_Forward Direction
変数によって指定された方向に前進する
.
_GetWidthSpace
指定された空間の横幅を取得する.
_GetHeightSpace
指定された空間の縦幅を取得する.
_GetCountStep
現在のステップ数を取得する.3 3 3 3 3 3 3
3 2 2 2 2 2 3
3 2 1 1 1 2 3
3 2 1 0 1 2 3
3 2 1 1 1 2 3
3 2 2 2 2 2 3
3 3 3 3 3 3 3
図2.2
視野の範囲_CountCollection
は,
コレクションの保持しているオブジェクトの個数を取得する 関 数 で あ る. _CollectAround
で 指 定 し た 範 囲 の エ ー ジ ェ ン ト の 集 合 を 集 め て,
_CountCollection
を用いれば,
そのコレクションを構成するエージェントの個数を取得することができる
.
例えば,
改札付近の指定された範囲のコレクションを取得し,
そ のコレクションに含まれる避難者エージェントの個数を調べることによって,
改札付 近の特定の範囲内に存在する避難者の人数を取得することができる.
_ViewCountAgent
は,
指定された位置座標を中心に,
周りのエージェントの個数を取得する関数である
.
この関数は 座標,
座標,
視野,
エージェント名を引数に取る 関数であり,
ある特定の座標を中心に,
指定したセル数だけ離れた範囲内にある指定し た種類のエージェントの個数を取得する.
この関数を用いて,
避難者エージェントの進 行方向にある障害物(
単種類)
の有無や,
周囲の避難者の密度,
火の占有度を調べた.
x y
_ViewCountAgent2
は,
指定された空間内の,
位置座標を中心に,
周りのエージェントの個数を取得する関数である
.
指定エージェント名をAll
とすることで,
範囲内の全 エージェントの総個数を取得することができる.
この関数を用いて,
移動方向に避難 者・火・壁など全ての障害物の有無を調べることができ,
状況に応じた回避行動や移動 速度の変更を行った.
_Forward
は, Direction
変数の値により指定された方向へ,
指定した距離だけ移動する関数である
.
この関数を用いて, Direction
変数の値によって定められた目的地方向 への1
ステップあたりの移動距離を定め,
改札・出口付近の避難者エージェントの脱出 方向への移動を表現した.
_GetWidthSpace
と_GetHeightSpace
は,
空間の大きさを取得する関数である.
例えば
,
この関数を用いて,
空間を座標によって分割し,
エリア毎にエージェントの行動を 変化させることができる.
_GetCountStep
は,
現在のステップ数を取得する関数である.
例えば,
この関数を用いて
,
ある一定の周期を定めることができる.
また, 1
ステップあたりの時間を定めて おけば,
経過時間をステップ数で把握することができ,
時間の経過とともにエージェン トの動きを変化させることもできる.
c)
その他のMAS
の設定と特徴•
コントロールパネルコントロールパネルはシミュレーションの制御
,
パラメータの設定を行う.
シミュレ ーションの制御で可能な操作は「実行」,
「ステップ実行」,
「一時停止」,
「停止」である.
パラメータの設定はWorld
直下の変数についてのみ可能である.
設定されたパラメー タは実行中リアルタイムに変更することができる.
設定の種類には,
「ボタン」,
「トグ ルボタン」,
「スライドバー」,
「直接入力」がある.
これを用いて「初期配置の避難者数」,
「延焼確率」
,
「指示の有無」などを設定した.
図2.3
は本研究で用いたコントロールパネ ルの図である.
詳細は3.2
節で述べる.
図
2.3
コントロールパネル•
出力の設定出力画面設定の種類には
,
「時系列グラフ」,
「棒グラフ」,
「二次元表示マップ」,
「数値 画面出力」,
「ファイル出力」がある.
空間内のエージェントの移動状態や数値的な変化 をリアルタイムに表示させることができる.
これを用いて,
設定空間内の避難者の移動 の様子を表示した.(
図2.4)
また,
生存者数・死亡者数を数値出力した.
図
2.4
二次元表示マップ第3章 避難行動のシミュレーション
3.1
災害時における人間の心理と行動特性自然災害や火災などの災害に直面したとき
,
人々はどのような心理を抱き,
どのよう な行動をとるのか.
また,
どのような行動が避難者の生死をわけるのか.
災害時におい て,
時間の経過とともに変化する人の行動とその特性について述べる.
なお,
この考え方は
[1], [2]
を参考にしている.
建物火災などの閉所空間における避難行動の際に
,
生死をわける決定的なポイント として,
「避難の見切り」の問題,
決定的危機的場面における人間の「避難志向」の問題が あげられる.
3.1.1
避難の見切り火災発生時には
,
火災の進行状況と,
その状況把握の度合いによって人々がとる行動 は大きく異なる.
避難行動は,
火災発生から避難に至るまでの経過時間にともない,
以 下のように分類することができる.
第一期「異常認知・火災の覚知」(情報の探索期)
この時期
,
人々は煙や音によって異常を認知する.
しかし,
この段階ですぐに避難を 開始する人はあまりいない.
まず,
その異常が何であるかを確かめ,
それによって「対 応行動」を決定しなければならない.
「煙」が異常であれば,
「煙」を出す元になるものは 何か,
その煙の臭いは何か,
どこから出ているのか,
誰かが何かしたのか,
何時からか,
などといった情報を求め探索に出る.
そして場合によっては,
異常の発見が様々なミス によって「火災の覚知」に至らず,
避難行動に遅れをもたらすことがある.
第二期「危険の認知」(避難の模索期)
この時期までは
,
人々は全員比較的落ち着いており,
身のまわりを見渡して避難を図 る.
その場に居合わせた人々が運命共同体を意識して,
全員一致協力する.
当然のこと ながら外部への脱出を試みるが,
外部に通じる道には,
既に相当の勢いで煙が噴き上げ ているため,
人々は目や鼻を刺す煙の凄まじさにたじろぎ,
その恐ろしさに退却してしまう
.
このあたりで人々は「危険」をはっきりと自覚する.
そこで,
この危険に対しての,
差し当たりの防衛策をとる.
例えば,
タオルを濡らし,
口と鼻を室内に流入した煙から 守るということである.
しかし,
ただ待っていたのでは危険は回避できない.
タオルで いくらか楽になった呼吸を整え,
再度避難を試みる.
しかし,
議論していた数分の遅れ で煙は先ほどよりも勢いを増し,
猛煙となり,
とても突入できる状態ではない.
断固た る決断の遅れが事態をさらに悪化させ,
危険の覚知は切迫の度合いを高める.
第三期「窮地の認知」(必死の脱出期)
この段階では全員の一体的行動は破れてバラバラになる
.
各々がこれと思う必死の 脱出を試みるのである.
人々は自分がとるべき行動の決断を迫られる.
たまたま選んだ 決断が,
脱出につながるか否かはその場の状況によって異なるが,
そのときの決断と行 動が,
その人間の生死を分けるのである.
人々の行動は
,
情報の探索から危険の認知,
そして窮地の認知と切迫し,
かつ急迫す る.
その間の状況の認知,
避難ルートの認知,
決断,
実行と,
個人のもつ経験やパーソ ナリティ,
火災知識,
また他者への依存などによって大きく左右されることになる.
そ して,
避難の一瞬一刻の遅れが生と死を分けるのである.
3.1.2
避難志向突発する災害時に
,
人々は強い恐怖に襲われ,
あわてふためく.
その状態において,
人々の知的・行動的レベルは大幅に低下し,
また変容する.
多かれ少なかれ,
退行,
可塑 性低減,
視野狭窄,
まわり道行動の不可能といった状態が生じてくるものと覚悟するべ きである.
従って,
防災心理学ではフール・プルーフ,
フェイル・セーフという2
つの 鉄則を建てる.
前者は,
いざという場合,
人々の頭の働きは低下して,
あたかも愚者の ごとくになる,
それをあらかじめ計算にいれて対策を練っておかなければならないと いうことである.
後者は,
災害非常時の場合,
人々は得てして失敗しがちなものである,
従って,
いざというときに備えるには,
たとえ失敗したとても大丈夫なようにしておく べきだということである.
以下に避難時において無意識のうちにとりやすい行動と,
そ の傾向について述べる.
1)
常用行動無意識のうちに
,
人は普段行き慣れた道を避難経路としやすい.
避難時には,
部分に とらわれ全体を見渡す能力が低下することも理由の一つであるが,
他の経路や出入り 口を考慮に入れる前に,
逃げ遅れるという不安要素が重なり,
日常利用する出入り方向 に殺到する.
2)
危険回避行動予想される危険を避け
,
火や煙などの直接的危険から逃れようとする.
経験のない人 ほど,
「いざとなれば一分間くらい息をとめて,
煙に逆らって脱出してみせる.
」という が,
それは実際不可能に近い.
黒く熱をおびた猛煙は,
人々に容赦なく襲いかかり,
体 全身に突き刺すような激痛を与える.
「窮地」の自覚で「必死」にならなければ,
その痛み に耐えて熱煙に突入することはできない.
このため,
人々は危険に対して退却行動をと る.
3)
同調行動出口などの目的地が認識できず
,
行くべき方向が定まっていないとき,
人は他者が向 かう方向,
または,
他者が大勢集まる方向に移動する.
危機的場面で大勢が一気に逃げ 出すとき,
その動きは心理的に強い誘引力となって人々に働きかける.
4)
開放空間への移動煙の影響で
,
息ができない,
目もろくに開けられないといった窮地の状況の中で,
人 は外気と突破口を求めて明るい方向や広い方向,
すなわち,
開放空間に移動する. 5)
リーダーの指示する方向への移動予期せぬ突然の災害発生に人々は動揺し
,
冷静さや自己判断力を失う.
恐怖状況下に おいて,
人は著しく不安定であり,
極端に被暗示性に富む.
そのため,
権威あるものに 依存し,
その指示に従う.
6)
攻撃的傾向避難とは
,
強いマイナスの状況や領域から脱出することであり,
その方向にエネルギ ーが結集される.
人々は嫌でも「人よりも早く脱出しよう」という衝動に駆り立てられ る.
しかし,
それを不当に阻むものが出てくると,
その状況を打破し,
前進を遮る周囲 の人々を押し退けてでも脱出しようとする.
こうした様々な基本的傾性のいずれが現実化するかは
,
置かれた物理的環境や,
火災 の状況,
リーダーの在り方や,
情報の存在などによって異なるであろうし,
また人々の 過去の経験や火災の知識,
それにパーソナリティ要因も交錯する.
3.1.3
群衆行動避難者の人数が多ければ多いほど
,
また,
危機的状況が切迫すればするほど, 3.1.2
節 で述べたような避難志向は高まる.
不安感や危機感が人々を駆り立て,
同一方向に進ま せる.
それが群衆行動となり,
最悪の場合パニックを引き起こす. [3]
によれば,
パニッ クとは「生命に対する直接的かつ切迫した危険を認知した不特定多数の人々が,
危険を 回避するために,
限られた脱出路に向ってほぼ同時に殺到することによって生じる混 乱」であるとされる.
脱出口の希少性などの物理的環境特性や,
個々人の心理と行動特性
,
また,
連帯感の欠如や集団規範の崩壊,
群集過密状態のような群集の持つ集団的特 性など様々なことが要因となり,
パニックは起こりうる.
3.2
シミュレータ上における避難行動のモデル化3.2.1
空間の設定1) 1
セルの大きさの定義[5]
によれば,
一般的に99
%の人の肩幅は52.6cm
以下であるとされる.
また,
完全に 服を着た状態で人は, 33cm
以下の胸の厚みと, 57.9cm
以下の肩幅を持つとされている.
一般的には,
荷物を持った状態や身体の揺れを考慮し,
設計上有用な手段として人体は60cm
×45cm
の楕円形に置き換えられる.
これを人体楕円という.
人体寸法とMAS
の 仕様を考慮し,
本研究では, MAS
の1
セルの大きさを,
人体楕円を囲う60cm
×60cm
の 正方形と定義する.
2) 1
ステップの経過時間の定義一般的に人間の歩行速度は
4km/h
(≒1.1m/s
)であるとされている.
本研究のシミュ レーションにおける空間内の避難者エージェントは,
基本的には1
セルに1
体のみ存在 し, 1
ステップに1
セルの移動が可能である.
これは1
ステップあたり約60cm
移動す ることを意味している.
このことと歩行速度の関係性から,
本研究では, MAS
の1
ステ ップの経過時間を0.5
秒と定義する.
3)
空間のモデル化日本では現在
,
電車の利用は主要な移動交通手段である.
そのため,
駅構内は人の出 入りが非常に多い空間である.
改札付近においては,
改札の幅が狭く,
単位時間あたり に通過できる人数が制限されるため,
混雑が発生する.
駅構内は利用頻度が高く,
人が 多く集まる場所であることから,
駅構内を本研究のシミュレーションの空間設定の場 所として適当な空間であると判断し,
モデル化した.
図3.1
は,
実在するA駅構内の改 札付近の見取り図を元に設定したモデル空間の図である.
改札
1
改札
2
改札
3
出口
2
出口1
図
3.1
A駅構内改札付近のモデル空間図中の白色の部分は
,
人が通行可能な場所を表しており,
灰色の部分は,
壁などの通 行不可能な場所を表している.
ただし,
この部分にはエスカレーターや階段部分も含ま れており,
この階のフロアとして認識させないために通行不可能な場所と設定した.
図 中の●マークのうち,
薄紫色のマークは改札目印,
濃紫色のマークは改札,
薄ピンク色 のマークは出口目印,
濃ピンク色のマークは出口を表している.
通常,
建物内において 人は,
案内板の方向指示や設置されている目印によって目的地の方向,
位置,
距離など の情報を得る.
これらの情報を頼りに,
目的地への経路と移動方向を決定する.
そこで,
各改札付近に改札目印を,
各出口付近に出口目印を配置し,
各目印を移動方向の目標 点とすることで目的地の選択の幅が狭まり,
経路選択を比較的容易に行うことができ る.
図の中央付近の改札と壁を境に上方は改札内,
下方は改札外である.
空間全体の大きさは
,
縦は約35m,
横は約80m
である.
4)
実行環境避難者エージェントと火エージェントは全て
1
ステップに1
回行動する.
空間内の避難者エージェントの初期配置人数は
0
から300
の間に,
火エージェントの 延焼確率は0
から0.3
の間に設定することができる.
延焼確率については3.2.4
節で述 べる.
シミュレーション開始時の想定状況は
,
何らかの要因により炎が上がり,
煙または熱 感知式の火災報知機が作動,
警報が発報した瞬間を想定している.
つまり,
全ての避難 者エージェントは直ちに避難しなければならないことを理解していると想定する.
シ ミュレーション終了条件は,
「空間内の避難者数が0
になる」または,
「260
ステップ経 過」である.
後者は,
煙の速度を水平方向に毎分1m,
垂直方向に毎分3
〜5m
とした場 合,
約1
分弱で空間全体が煙に覆われることから,
この空間における最遅避難時間を2
分
30
秒弱とし,
求められた条件である.
3.2.2
避難者エージェントのルール設定人は行動を起こすとき
,
何らかの目的を持って行動する.
歩行に関しては,
目的地に 到達することが最終的な目的である.
まず,
目的地を選択し,
それに向かう経路を設定 し,
移動を開始する.
移動の際,
人は絶えずあらゆる外界の情報に気を配っている.
移 動方向に障害物があるならば,
それを回避し,
他人との接触を避けるためにより開放的 な空間を選択しようとする.
周囲の情報をもとに随時判断を行い,
より最適な移動方向 を決定し,
目的地へと向かう.
避難者の移動目的は避難であり
,
最終目的は閉所空間から脱出し,
自身の生命を守る ことである.
目的達成のための状況判断と意思決定を,
移動方向の優先度として表し,
避難行動を表現する.
本研究のシミュレーションにおいて
,
各避難者エージェントは周囲の情報を元に,
総 合的に最優先移動方向を決定し,
後に移動距離など具体的な行動決定を行う.
1)
移動方向の定義移動方向は
,
周囲の8
セルへの移動と対応させ, Direction
変数θの値によって以下の8
方向に定義する.
0
方向0
≦θ<22.5 337.5
≦θ<360
45
方向22.5
≦θ<67.5
90
方向270
方向315
方向292.5
≦θ<360
247.5
≦θ<292.5 67.5
≦θ<112.5
(+1,+1) (+1,0) (+1,
-1)
(0,+1) (0,0) (0,
-1)
(
-1,+1) (
-1,0) (
-1,
-1)
180
方向157.5
≦θ<202.5
135
方向112.5
≦θ<157.5
225
方向202.5
≦θ<247.5
図
3.2
移動方向と変位( d x , d y )
図
3.2
は移動方向と周囲のセルへの移動変位の対応を表している. 0
≦θ<22.5
または
337.5
≦θ<360
のとき0
方向, 22.5
≦θ<67.5
のとき45
方向, 67.5
≦θ<112.5
のとき90
方向, 112.5
≦θ<157.5
のとき135
方向, 157.5
≦θ<202.5
のとき180
方向, 202.5
≦θ<247.5
のとき225
方向, 247.5
≦θ<292.5
のとき270
方向,
292.5
≦θ<360
のとき315
方向とする.
の変位を,
の変位を とし,
エージェントの
1
セルの移動を と表すと, 0
方向のとき(0,
-1), 45
方向のとき(
-1,
-1), 90
方向のとき(
-1,0), 135
方向のとき(
-1,+1), 180
方向のとき(0,+1), 225
方向のとき(+1,+1), 270
方向のとき(+1,0), 315
方向のとき(+1,
-1)
である.
x d x y d y
) d , d ( x y
2)
視野の定義本研究のシミュレーションにおける避難者エージェントの「視野」とは
,
単に「実際に 目に見える範囲」ではなく,
各避難者エージェントの「認知の範囲」であると定義する.
例えば,
空間全体の地理を把握しているものは広範囲に亘る視野を確保できるものと する.
また,
視野を狭める要因として,
煙や停電による視界の悪化や方向感覚のずれ,
避難時の恐怖感による退行や可塑性低減などを考慮にいれる.
3)
他者から影響を受ける範囲の定義[5]
によれば,
人類学者ホールは,
他者との距離(
間隔)
を人間の感覚特性に基づいて定 義し,
公衆距離,
社会距離,
個体距離,
密接距離の4
種類に分類したとされる.
それぞ れはさらに遠方相と近接相に分類される.
この分類は視覚,
嗅覚,
受熱感覚,
聴覚,
接 触の可能性など,
さまざまな距離での知覚の段階分析に基づいている.
これらの分類の うち,
公衆距離近接相とは,
他者との距離が3.6m
〜7.5m
離れた状態をいう.
この状態 では相手の細部を見分けることは不可能であるが,
喜怒哀楽の表情を見分けることは 可能である.
声によるコミュニケーションはほぼ普段と変わらず,
ジェスチャーやその 他の動作も誇張されない.
また,
危険を感じたときに逃げるか応戦するか判断すること ができる距離であるため,
逃走反応の距離ともいえる.
本研究では,
公衆距離近接相(3.6m
〜7.5m)
の中間値である5.5m
を通常の動作で相手に意思を伝えることができる距離とする
.
従って, 1
セル=0.6m
であることから,
他者から影響を受ける範囲を9
セ ルと定義する.
4)
優先度配列Priority ( i , j )
の定義各避難者エージェントの現在位置を中心
(1,1)
とし,
周囲の8
セルを含めた近傍を表す3
×3
の2
次元配列を優先度配列として設定する.
各避難者エージェントは周囲の情報 を元に,
現在の位置と周囲の8
セルの内,
最も優先されるセルを,
すなわち最優先移動 方向を決定する.
図3.3
は優先度配列と移動方向の対応を表している.
例えば, 135
方向 への移動は,
セル(0,2)
への移動と対応する.
0
方向45
方向90
方向270
方向315
方向(2,2) (2,1) (2,0)
(1,2) (1,1) (1,0)
(0,2) (0,1) (0,0)
180
方向1 35
方向225
方向図
3.3
優先度配列( i , j )
と移動方向の対応5)
占有率の定義と算出方法占有率とは
,
指定されたエージェントが該当する領域内にどの程度の割合で存在す るかを示した値であり,
以下のように定義する.
(
占有率)
=(
領域内の指定エージェントの数)
÷(
領域内のセルの数)
占有率の算出で扱う領域とは
,
各避難者エージェントを中心とした周囲の領域のこ とであるが,
優先度配列を構成する各セル別に探索領域の基準位置と範囲を設定する ことで,
範囲1
の近接するセルの情報だけで優先度を決定するのではなく,
広範囲の情 報を元に優先度を決定することができる.
移動方向を決定する上で用いられる占有率の優先度 は以下のように算出され る
.
) , ( i j
•
各避難者エージェントの現在位置を とし, ,
を0
から2
までの変数とす る.
) ,
( x y i j
•
を と探索領域の基準位置のずれ, α
を適当な重みとする. α
の値は算出 した占有率の影響力や重要度を表しているため,
対象とする指定エージェント によって異なる.
重みの関係は6)
で述べる.
m ( x , y )
•
を中心とした範囲n
の領域を探索領域 とする と,
) ) 1 ( , ) 1 (
( x + i − × m y + j − × m ( i , j )
占有率の優先度
( i , j ) = (
探索領域( i, j )
内の指定エージェントの数)
÷
(
探索領域内のセルの数( 2 n + 1 )
2)
×α
となる
.
図
3.4
に占有率算出の例を示す.
図はm = 3 , n = 2
としたときの例である.
避難者エージェント 障害物
探索領域
( i , j )
基準位置現在位置
( x , y )
と探索領域の基準位置のずれm = 3
探索領域の範囲
n = 2
図
3.4
占有率の算出方法障害物は図中に示した場所にのみ存在すると仮定し
,
障害物の占有率 を求め る.
) , ( i j O
(
探索領域のセルの数) = ( 2 × 2 + 1 )
2= 25
であるから,
, ,
25 / 7 ) 0 , 0
( =
O O ( 0 , 1 ) = 4 / 25 O ( 0 , 2 ) = 1 / 25 , 25
/ 3 ) 0 , 1
( =
O , O ( 1 , 1 ) = 0 , O ( 1 , 2 ) = 0 , 25
/ 1 ) 0 , 2
( =
O , O ( 2 , 1 ) = 0 , O ( 2 , 2 ) = 0
となる
. O ( i , j )
に重みα
をかけると優先度p
O( i , j )
を求めることができる.
6)
優先度を用いた移動方向の決定各指向で与える優先度の大きさには対象とするエージェントによって
,
以下の大小 関係が成り立つ.
① 範囲
1
の近傍から得られる情報を元に決定される優先度の大きさの大小関係は,
壁 > 火 > 人とする
.
これは,
壁と同じ場所に避難者は存在することができないなど,
物理的な影響力の強さを考慮した上で決定した
.
② 広範囲から得られる情報を元に決定される優先度の大きさの大小関係は
,
火 > 人 > 壁とする
.
これは,
火が多くある方には行きたくないなど,
心理的な影響力の強さを考慮した上で決定した
.
<優先度に組み込む指向>
各避難者エージェントは周囲の情報を元に移動方向を決定するため
,
災害時の人間 の行動特性を踏まえ,
優先度に組み込む指向を設定する.
a)
目的地指向まず
,
モデル空間を座標によって改札内と改札外に分ける.
改札内の避難者エー ジェントは改札目印を目指し,
改札外の避難者エージェントは出口目印を目指す.
改札・出口へ向かう目的地指向は,
各避難者エージェントに対して以下のように決 定される.
•
避難者エージェントの視野内の領域に目的地が存在するか否かを調べる.
•
領域内に目的地が存在する場合,
避難者エージェントから目的地までの距離を 算出し,
最短な目的地を記憶させる.
ただし,
視野内に目的地が複数存在する 場合,
距離が近い順に目的地を記憶させる.
•
避難者エージェントから見た最短目的地方向の絶対角度を算出し, Direction
変 数θ
で表す.
ただし,
最短目的地付近が火エージェントで覆われている場合は2
番目に近い目的地方向の絶対角度を算出し, Direction
変数θ
で表す.
• θ
の値に応じて優先移動方向θ *
を8
方向いずれかに決定する.
• θ *
に 対 応 す る セ ル( i , j )
に プ ラ ス の 優 先 度 を 付 加 す る.
ま た, θ * ± 45 , 90
* ±
θ
方向に対応するセルにも少し小さい優先度を付加する.
これは移動方 向に障害物がある場合でも後退せず,
選択経路を変え,
障害物を避けながら目 的地へ向かうという人間の行動特性を考慮したためである.
目的地方向
θ *
45
* + θ
45
* − θ 90
* + θ
9
* − 0 θ
避難者エージェント 目的地方向
優先移動方向
(
長さは優先度の大きさを表す)
それぞれ対応するセルに優先度を付加する
.
図
3.5
目的地指向b)
障害物判定と危険回避指向人は壁や火が存在する場所に移動することはできない
.
また,
壁との接触を避け るためや,
火などの危険物に近づかないようにするために,
できる限りこれらと距 離をとり,
回避しようとする.
障害物と危険回避指向は,
各避難者エージェントに 対して以下のように決定される.
ⅰ
)
障害物(
火と壁)
判定•
現在位置を中心とした範囲1
の領域に障害物が存在するか否かを調べる.
•
壁や火エージェントが存在する場合,
マイナスの優先度を対応するセルに 付加する.
•
この優先度を付加することで,
避難者エージェントが壁や火が存在するセ ルに移動することを防ぐことができる.
ii)
火回避指向•
現在位置を中心とした範囲9
の領域に火エージェントが存在するか否かを 調べる.
•
火エージェントが存在する場合, 4)
で述べた算出方法において, ,
とし,
各方向別探索領域内における火の占有率を算出する.
占有率に 適当な値をかけ,
その値をマイナスの優先度として対応するセルに付加す る.
= 5 m
= 4 n
•
この優先度を付加することで,
避難者エージェントは危険物から離れたよ り安全な方向を選択することができる.
iii)
壁回避指向•
現在位置を中心とした範囲5
の領域に壁が存在するか否かを調べる.
•
壁が存在する場合, 4)
で述べた算出方法において, m = 3 ,
とし,
各方 向別探索領域内における壁の占有率を算出する.
占有率に適当な値をかけ,
その値をマイナスの優先度として対応するセルに付加する.
= 2 n
•
この優先度を付加することで,
避難者エージェントはできるだけ壁と接触 しない方向を選択することができる.
障害物判定は
,
障害物が存在する セルにマイナスの優先度を付加.
空き領域判定は