九州大学学術情報リポジトリ
Kyushu University Institutional Repository
境界整合の手法に基づく回折トモグラフィの再構成 法に関する研究
石田, 健一
九州大学システム情報情報工学
https://doi.org/10.11501/3123029
出版情報:Kyushu University, 1996, 博士(工学), 課程博士 バージョン:
権利関係:
第3章 軸対称多層円柱の再構成例
本章では, 軸対称屈折率分布の再構成を行う. まず, 簡単な例として単層誘電体円柱を 取り上げ, 平均二乗誤差の最適化の様子を可視化する. 更に, 系統的に屈折率分布および サイズを変えた誘電体4層円柱の再構成の計算機シミュレーションから, 手法の適用範囲 について検討する. また, 医療分野への応用を考え, 生体モデルに近い屈折率をもっ円柱
の再構成も行う. 数値例では, 第3.6節を除き, 円柱外部の自由空間を真空として扱ってい る. 真空でない空間を考えるときは, 以後, 屈折率を比屈折率で置き換えればよい.
3.1 均質円柱(単層円柱)モデル
本節では, 最も簡単な例として, 自由空間中に置かれた均質円柱 (N = 1)の再構成を考 える. 観測散乱波として, 雑音が含まれないという意味で, 厳密な散乱波を用いる.
散乱波の平均二乗誤差Qの最小点探索の様子
前章では, 散乱波の平均二乗誤差Qの最小点を求めることにより 円柱の屈折率を再構 成する手法を述べた. 本項では, このQの様子を調べておく.
図3.1は, 屈折率の真値が2.0+ i1.0(損失性)で半径1入の均質円柱において, E波入射 に対して, 散乱波の平均二乗誤差Qを屈折率ベクトルnの関数として描いた鳥観図であ る. ここで, 入は自由空間中の波長である. 屈折率ベクトルnの初期値を1.0+ iO.O とし,
第2.4節のアルゴリズムに従って, 最小点を探索した経路を図3.2に示す. 図中の黒丸は実 際にQの値を計算した点である. この図より, ベクトルnの探索点が初期値から最小点 に落ち込んで行く様子がわかる. 5回の直線探索を行い 最終的にQの値は1.27 X 10-12
に達している.
図3.3は, 屈折率の真値が2.0+ iO.O(無損失)で半径
1入の円柱において,
同様にQを-25-
nの関数として描いた鳥観図である. 実軸付近ではQはたくさんの凹凸があり, 非常に 複雑になっている. その凹凸の中に最小点があることがわかる. ベクトル nの初期値を 1.0 +
iO.O とし, 最小点を探索した経路を図3.4 に示す. この無損失円柱のモデルの場合,
ベクトルnの探索点は, 2.42 + iO.80付近の極小点に陥っており, 実軸上の最小点2 .0+ iO.O
に到達できていない. それまで6回の反復を行い, 0の値は8 .17
X 10-1に留まった.この探索の様子から, 最小点の探索は, 損失がある場合に容易であり 無損失の場合に 困難であることが予想、できる.
図3.5は, 自由空間中に置かれた半径1入の均質円柱の屈折率の再構成に対して, 本手法 が適用できる範囲について調べたものである. 図中で白丸'0'はQの絶対値が最終的に収 束判定値引(=
10-7) よりも小さくなったモデルの屈折率を示す.
このモデルについては,精度の良い再構成像が得られている. 一方, 黒丸'.'はQの絶対値が最終的に収束判定値 引よりも小さくならなかったモデル, つまり, 最適化の際に極小点(局所的最適解)に陥っ てしまうモデルの屈折率を示す. このモデルについては 精度の良い再構成像が得られて いない. この図からわかるように, 黒丸は実軸の近くに集中しており, 損失が小さい円柱 の再構成は, 屈折率実部が大きくなると, 困難になるが, 損失が大きい円柱の再構成は, 屈 折率実部が大きいところまで再構成可能である. これは図3.1 図3.3から 予測した内容 と一致している.
損失が小さく再構成が困難であったモデルに対しては, nの初期値を事前情報によって 真の値の近くに設定できれば, 本手法が適用できる可能性がある. しかし 屈折率が高く なると極小点の数が増えるために, 初期値を近くに選ぶことが, かなり困難になると思わ れる.
図3.6, 3.7は, 同じ均質円柱において,
H波入射に対して, 散乱波の平均二乗誤差。を
屈折率ベクトルnの関数として描いた鳥観図である. E波入射と同様に 実軸付近で起伏 が激しくなっていることがわかる.-26-
1e+10
1e-10
2.5
。
図3.1:ベクトルnの関数としてみたn (円柱の屈折率が2.0 + il.Oの場合,
C
E
2.5
2
。
0.5
Re[n]
2 2.5 3 3.5
図3.2:探索経路(円柱の屈折率が2.0+ il.Oの場合,
-27-
E波入射)
E波入射)
1e+10
1e-10
2.5
。
Im[n]
図3.3:ベクトルnの関数としてみたn (円柱の屈折率が2.0 + iO.Oの場合,
C
E 2.5
2
1.5
0.5
。
-0.50
0.5 1.5 2 2.5 3 3.5
Re[n]
図3.4:探索経路(円柱の屈折率が2.0 + iO.Oの場合,
-28-
E波入射)
E波入射)
。:
converged
• :not converged 3
2
c
・()()()O(X)(Xコ・
コ・・・(X)(ヌコ・・・o コ・oooocxコ・00・I・00000・
ヌコoo..()()(コ・・・c幻・0.0..・・・ 仁Xコ )()()()()()()()コ・・・・・・0・・・ 0・・・・・・・・・・・・・・1・・・・・・1・
cxxxxxxxxxx'x..ヌコ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・l・・
ーーーー一・1・1・・・・・0・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・
。
2 3 4 5 6
rI n
図3.5:半径が1波長の均質円柱の屈折率の再構成に対して本手法が有効な範囲(E波入射)
-29-
1e+10
1e-10
。
1.5
0.5 Im[n]
2.5
図3.6:ベクトルnの関数としてみたn (円柱の屈折率が2.0+ il.Oの場合, H波入射)
1e+10
1e-10
。
1.5 Im[n]
2.5
図3.7:ベクトルnの関数としてみたn (円柱の屈折率が2.0+ iO.Oの場合, H波入射)
-30-
遠方散乱パタン
平均二乗誤差。の実軸付近の凹凸は, 屈折率の変化に対する散乱波の変化に関係がある と思われる. そこで, 次に均質円柱の遠方散乱パタンを調べておく. 座標系を図3.8に示す.
図3.9は, 自由空間中に置かれた半径1入の無損失均質円柱による遠方散乱パタンfを円 柱の屈折率nlに対する変化として描いたものである. 無損失の場合, この遠方散乱パタ ンは, 屈折率が高くなるにつれて振動しながら変化している. また, E波入射とH波入射 の場合を比較すると, H波入射の場合は E波入射の場合に比べ 振動せず変化している.
図3.10は, 自由空間中に置かれた半径1入の損失のある均質円柱による遠方散乱パタンを 円柱の屈折率に対する変化として描いたものである. この遠方散乱パタンは, 屈折率が高 くなるにつれて振動しているものの無損失均質円柱による遠方散乱パタンに比べ非常に変 化が緩やかである.
一方, 図3.1, 3.3に示したように実軸付近の凹凸は, この遠方散乱パタンの円柱の屈折
率に対する変化に強く関係しているはずである. 損失がある場合 この遠方散乱パタンの 変化が緩やかであるため, nは損失のある領域で緩やかな変化をもち 最小点の探索が容 易になっている.
ui
吋ト+
図 3.8:座標系
-31-
201o�olf(8)1
20 10 0 -10 -20 -30 -40
。
201o�olf(8)1
20 10 0 -10 -20 -30 -40
。
180
E波入射
180
H波入射
2.0+iO.0 1.8+iO.0 1.6+iO.0 1.4+iO.0 1.2+iO.0
n1
2.0+iO.0 1.8+iO.0 1.6+iO.0 1.4+iO.0 n1 1.2+iO.0
図3.9:無損失均質円柱による遠方散乱パタン
-32-
20 10 0 -10 -20 -30 -40
201o�0If(e)1
。
2.0+iO.2 1.8+iO.2 1.6+iO.2 1.4+iO.2 1.2+iO.2
n1
180
E波入射
20 10 0 -10 -20 -30 -40
20 lO�olf(8) I
。
2.0+iO.2 1.8+iO.2 1.6+iO.2 1.4+iO.2 n
180
H波入射
苅3.10:損失性均質円柱による遠方散乱パタン
-33-
3.2 多層円柱の再構成
次に, 自由空間中に置かれた多層円柱に対する屈折率分布の再構成を考える. E波入射を 考え, 観測散乱波として, 雑音が含まれないという意味で, 厳密な散乱波を用いる. 図3.11 で, 実線は, 破線で 示したモデルに対する再構成結果を示す. ここで, 屈折率ベクトルη の初期値は, 1.0 + iO.Oを用い, 第2.4節で述べたアルゴリズムに従って, 1回の反復(直線 探索)でのQの変化ムQがム[2<ε2(=10-10) であるとき, 円柱の分割数を1→2→4 のように増やした. この例では N=1. N=2に対して それぞれ9回, 31回の反復で 終了している. しかし,[2の値は収束判定値引(=10-7)より大きい. そこで, 分割数を N二4に増やしてプロセスを続けている. N=4の段階で72回反復した後,[2<εlとな
り, プロセスは終了している. 最終的な再構成結果は, モデルの値に極めてよく一致して いる.
-34-
2
一一一一J
0.6�-
E � :
0.4ト !
トト」
...
c
1.5
0.2
41 L ハU
'--・E・-nuLnu 0.5 1
ρ/λ
0.5 1
ρ/入
(
a) N = 1,9回反復後?。二8.44
X10-3
...
c
0.6�一一l 0.4
0.5 1
ρ/λ
亡
1.5
一一一ー』 0.2
し nU 凋1aa
0.5 1
ρ/入
ハU L nu
(b)N=2,31回反復後,
n= 5.90
x10-3
...
C c
0.5 1
41Lnu 0.5 1 ρ/λ
ρ/λ
(c)N=4,72回反復後,n = 6.86 x 10-8
図3.11: 4層円柱の再構成(E波入射)
-35-
3.3 4層円柱に対する適用範囲
本節では, 系統的に屈折率分布およびサイズを変えて, 4層円柱の再構成を行い, 本手 法の有効性を検討する. 観測散乱波に雑音が含まれる場合および、偏波が異なる場合につい てもあわせて検討する. 別に, 8層円柱についても有効性を検討しており, その結果は付 録Cに掲げておく.
円柱の外部は自由空間とする. 屈折率の初期値nは自由空間の屈折率1.0 + iO.O に設定 する . 式( 2 .39)で打ち切り項数MはIHM(ηokR)γMI2く10-13を満たす最小の数とした.
この値は, 以後 示す例において, 円柱のサイズに対しては大きく変化するが, 屈折率に関 してはほとんど変化しない. H波入射のときは, E波入射のときよりも高次のモードで展 開係数が大きくなるが, 展開係数の値は次数が上がると急速に減少するので, わずかに項 数が増加する. また, 損失性円柱や外側の屈折率が高い円柱の再構成においても, このM に大きな差は見られない. 一方, 観測面の配置はR= 2r1' 観測点の数はJ= 2M + 1と する. 収束判定値はε1 = 10-7を用い, 0くε1でアルゴリズムを終了する. また, 0の1 回微分\70くε2(=10-7)のとき分割数N を1→ 2 →4のように増やす. なお, 本節の数 値計算は4層円柱に対するものであるので, N=4の過程で\70くε2(=10-7)の場合も,
アルゴリズムを終了する. 4層円柱の再構成については, N=8への延長により再構成像 の改善は見られない. 一般的な多層円柱に対して必要な分割数は 第3.5節で考察する.
3.3.1
内側の屈折率が高い円柱の再構成-損失のないとき-
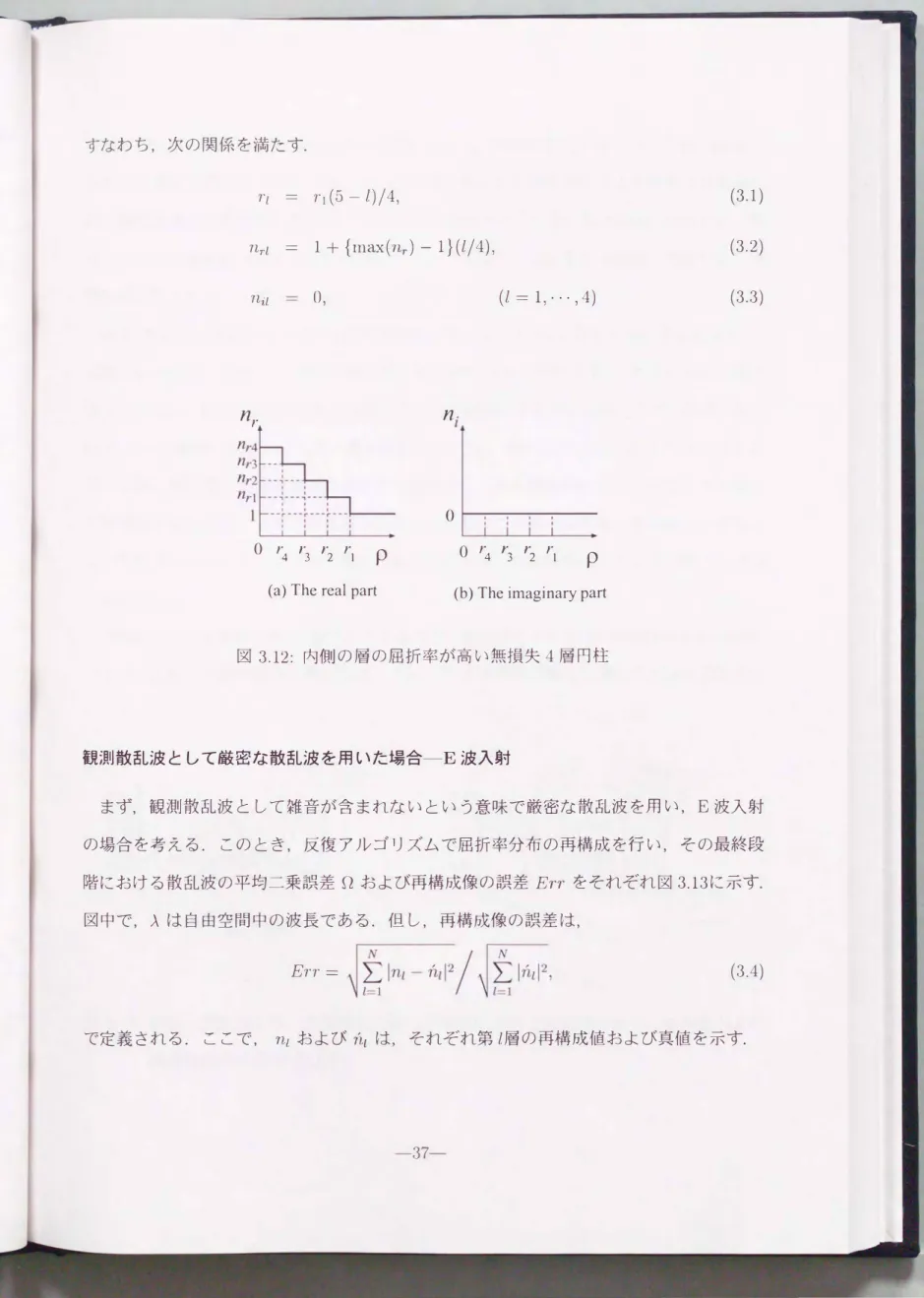
内側の屈折率が高く損失のない4層円柱の再構成を考える. ここで, 円柱外部は自由空間 とする. その屈折率分布を図3.12 に示す. 図中で, nrおよびniは, それぞれ屈折率の実部 および虚部を示す. 円柱の屈折率の虚部はOであり, 屈折率の実部の最大値(以後max(nr) と記する)および円柱の半径γ1は, さまざまな値を与える. 円柱内部の境界は等間隔に配 置し, 円柱の各層における屈折率はmax(nr)に応じて, 同じ 割合で変化するものとする.
-36-
すなわち, 次の関係を満たす.
r l
=rl(5-l )/4, (3. 1 )
nrl 二 1
+{max(叫)
-1}(l/4), (3.2)
nil 0, (l
=1γ・. ,4) (3.3)
n
r
n
。
o r4ららr1 p o r4ろらr1 p
(a) The real part (b) The imaginary part
図 3.12:内側の層の屈折率が高い無損失4層円柱
観測散乱波として厳密な散乱波を用いた場合-E波入射
まず, 観測散乱波として雑音が含まれないという意味で厳密な散乱波を用い, E波入射 の場合を考える. このとき, 反復アルゴリズムで屈折率分布の再構成を行い, その最終段 階における散乱波の平均二乗誤差。および、再構成像の誤差Eけをそれぞれ図3.
13に示す.
図中で, 入は自由空間中の波長である. 但し, 再構成像の誤差は,
Err
=�� Inl一向12 / 品 l1ÍlI2, (3.4)
で定義される. ここで, 問および、向は, それぞれ第l層の再構成値および真値を示す.
-37-
図3.13(a)において, 落ち込んでいる部分(0 <εdに対応する円柱に対しては, 。は十 分小さい値まで、最小化できている. このことは, 仮定した屈折率分布より計算される散乱 波と観測散乱波とが十分に整合していることを意味する. 一方, 図3.13(b)において, 落 ち込んでいる部分に対応する円柱に対しては, アルゴリズムがうまく動き 精度のよい再 構成像が得られたことを意味する.
図3.13(a)で, 不均質性が強い(屈折率が高くサイズが大きい )損失のない円柱に対して,
ほぼ{max(ηr) - 1}γ1/入> 0.6の範囲で, 散乱波の平均二乗誤差。は十分に小さい値に なっていない. 図3.13(b)からわかるように, この範囲にある円柱に対しては, 再構成像の 誤差Errも非常に大きい. これらの円柱に対しては, 本アルゴリズムでQの最小点を探 索する際に最小点に到達で、きず、に極小点に留まっていると考えられる. これは, 本手法の 不均質性が強い円柱に対する適用限界を示している. この適用限界は, 損失がない物体に ついてはKleinmanらによっても報告されており[37], その結果は, ここでの結果とほぼ 一致している.
均質円柱については, 第3.1節で述べたように, 屈折率ベクトル
nの虚部が小さい場合,
つまり, 損失の小さい物体に対しては, ベクトルnの実部の変化に対してO(n)は大きく
Q Err
2.0 1.8 1.6 1.4 Max( nr)
1.2
' ,
1e+00 1e・01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( nr)
r 1/λ 2.0 1.2 r 1/λ 2.0
(a)
〆,f店、、 、、。,,ノ'O図3.13:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(E波入射)
-38-
振動する. また, 屈折率が高くなったり, 円柱のサイズが大きくなるにつれて, 最適化問 題において, 初期値から真値に向かう探索経路付近に, 極小点が発生する. 従って, 最適 化の際に局所的な最小値(偽値)に陥りやすい. これは, 4 層円柱に対しでも同様と予想さ れ, ここでの結果が説明できる.
また, 図3.14 に, 再構成例を示す. 図中で 実線は再構成値であり, 破線は真値である.
図3.14(a) はmax(ηr)= 2.0, T1二2. 0/入のモデルであり, 上述の適用限界を越えた不均 質性の強い物体である. 再構成値は, 真値とは大きく異なり 初期値と真値の中間的な値 に留まっている. これは, 初期値と真値の聞に極小点があり, 真値(最小点)に到達できな かったことを示している.
この極小点に陥ってしまった円柱に対して 更にN=8に増やして推定を続けてみた.
しかしながら, 反復を500回行っても収束しない(\70 <ε2を満たさない)場合が多く, ま た, 散乱波の誤差Qはわずかに小さくなるものの 再構成像の改善はみられなかった.
次に, 半径の小さい円柱に注目する. 図 3 .13で, 半径がγ1/入く0.5の範囲において は, 散乱波の平均二乗誤差Qは十分小さくなっているが 再構成像の誤差Eけは大きい.
図3.14(b)は, 小さい円柱に対する再構成例を示す. 全ての層にわたり平均的にみると, そ の再構成値は真値に近いものの, 各層の値は正確に再構成できていない. このことから, 解 像度の限界を示している.
また, 図3.13の中には, 局所的に突出した点がある. 例えば,max( nr) = 1.6,γ1/入二1.2 である. この点に対する再構成像を図3.14(c)に示す. 一部の層においては, 屈折率の値が 1 より小さく推定されており, 明らかに非物理解になった. ここで, 制約のない最適化法 の一つである準ニュートン法に基づいて, 不適切な降下方向ベクトルが選択されたと考え られる.
本研究では, 事前情報として屈折率がわかっていないという立場から再構成できる範囲 を調べるために初期値として, 自由空間中の値1.0+ iO.Oを用いた. しかし, 第3.1節から わかるように, n = 1.0 + iO.O付近では, O(n)の変化が複雑であり, その点での勾配ベク
-39-
トルの向きが最小点の方向を向いているかはわからない. また, 数値解法では, 正確な直 線探索を常に行うことはできない. 従って, 図3.14(c)示したように, 明らかに非物理解の 方向へ探索してしまうことも時折起こってしまう. これを防ぐためには 初期値の選択法 や制約付最適化法 の適用を考慮する必要があるが, これは今後の課題とする.
なお, 図3.13のデータ取得には, 200種の円柱を再構成する必要がある. この計算時間は,
ワークステーションHP9000j735(124.8MIPS)を用いて, CPU時間で, 217分であった.
-40-
1.5 t-
0.0 1.0
イ
2.0
ケ1
ρ/入
n;
1.0
0.5
0.0 0.0
(a)不均質性の強い円柱
1.0 2.0 p/入
(max(ηr) =
2.0,ni =
0,γ1/入二2.0; n=
2.81 x 10-1, Eγγ= 1.91 X 10-1)nr
1.4
1.2
1.0
0.0 0.1
n
「一
0.4
0.2 p/λ
0.2
。。
0.0
(b)半径の小さい円柱
0.1 0.2 p/入
(max(ηr)二1.4,同=0, r1/入= 0.2; n = 6.10 x 10-8, Err = 3.76 x 10-2
nr
1.5 ‘ ー ーーー--,
‘ーー一一一 ー,
1.0
0.5
0.0 0.6 1.2 p/入
n
1.0
0.5
0.0 し
0.0 0.6 1.2 p/入
(c)図3.13において局所的に突出した点に対応する円柱
(max(nr) = 1.6, ni =
0,ア1/入二1.2; n=
3.08 x 10-1, Err= 4.39
x 10-1)図3.14:厳密な散乱波を用いた再構成例(E波入射). 実線は再構成値, 破線は真値を示す.
-41-
観測散乱波として厳密な散乱波を用いた場合-H波入射
次に, H波入射に対して, 観測散乱波から損失のない4層円柱の屈折率を再構成する.
観測散乱波として雑音が含まれない厳密な散乱波を用いる. 反復アルゴリズムの最終段階 における散乱波の平均二乗誤差Qおよび再構成像の誤差E門を図3.15に示す.
同じように, 図3.15(a)において, 落ち込んでいる部分に対応する円柱に対しては, 0は 十分小さい値まで最小化できている. また, 図3.15(b)において, 落ち込んでいる部分に 対応する円柱に対しては, アルゴリズムがうまく動き, 精度のよい再構成像が得られたこ とを意味する.
この図からわかるように, H波入射では, 損失のない場合, ほぼ{max(ηr)-1
}r1/入く0.9
の範囲で本手法は有効である. このH 波入射に対する適用範囲は, 既に示したE波入射 に対する適用範囲{max(ηr)- 1}γ1/入<
0.6に比べて, やや広くなっている.Q
2.0 1e+00
1e-01 1e-02 1e司03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr)
1.2 ' .
2.0 1.8 1.6 1.4 Max(nr)
1.2 ' .
r 1/λ 2.0 r 1/λ
(a)
〆'SE1、 、、E,,ノ唱hU図3.15:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射)
-42-
屈折率を初期値l.0+ iO.Oから, 次第に高くなるように変化させたとき, 散乱波の遠方 パタンは, H波入射の方が, E波入射よりも広い範囲で, 振動なく変化しているようであ る(図3.9). 従って, 関数Qもまた, 初期値から高い屈折率まで広い範囲で, 単調に変化 していると考えられ, 最小点の探索が広い範囲で容易であると考えられる.
一方, 物体が小さく, rl/入< 0.5のような物体に対して, 。は小さい値に最小化されて いるのに対し, 再構成像の誤差Errは大きくなっている. この結果は, 本アルゴリズムに おける再構成像の解像限界を示している.
観測散乱波に雑音があるとき-E波入射
次に, 観測散乱波に雑音が含まれる場合を考える. ここでは, 信号対雑音比(SNR) を次 式で定義する.
.qJ
U 日乞同 /// . qJ U 山γ白州 σ同) ハU ハU 1i 一一 R N QU (3.5 )
但し, Usは厳密な散乱波, Unは散乱波に混入している雑音を示し, Jは観測点の位置を示 す ここでは, 簡単のため, 散乱波の振幅および位相にそれぞれ一様乱数を付加し, SNR を20dBに設定する. 実際に実験で得た散乱波から, 物体の再構成を行った例[46]が報告 されているが, ここで設定するSNRは その報告中での値にほぼ等しい.
図3.16に, E波入射の場合に, 雑音を含む観測散乱波から, さまざまな半径および屈折 率分布をもっ円柱の屈折率分布の再構成を行い, 散乱波の平均二乗誤差。および再構成像 の誤差Errの最終段階の値を示す.
観測散乱波に雑音が含まれる場合, 与えた屈折率分布による算定散乱波と観測散乱波と が完全に一致することはありえない. その結果, 0の値は大きくなる. しかしながら, 先 に示した雑音がない場合の適用範囲については, 再構成像の誤差Errは, 0.01以下と非 常に小さくなっていると言える. このように 本アルゴリズムは 観測の際に雑音が混入
した場合でも, 損失のない円柱に対しては有効である.
-43-
Q Err
2.0 1.8 1.6 1.4 Max( n r)
1.2 ' .
1e+00 1e-01 1e-02 1e-03 1e-04 1e・05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( nr)
r 1/入 2.0 1.2 r 1/入 2.0
(
a)
'hu図3.16:雑音のある散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射 )
観測散乱波に雑音があるとき-H波入射
次に, H波入射で, 観測散乱波が雑音を含んでいる場合を考える. ここで, 信号対雑音 比(SNR)は20dBに設定する. 反復アルゴリズムの最終段階における散乱波の平均二乗誤 差Qおよび再構成像の誤差Eけを図3.17に示している. 観測散乱波に雑音が含まれる場 合には, 算定散乱波と観測散乱波とを完全に一致させることはできないが, それでも, 再 構成像の誤差Errはかなり小さくなり, 雑音のない場合に求めた有効な範囲においては,
ほとんどの円柱に対して 精度のよい再構成結果が得られた.
E波入射とH波入射の場合, 共に精度良く再構成できる範囲において, 二つの偏波の場 合をそれぞれ比較すると, 雑音のある場合, 散乱波の平均二乗誤差Qの最終値はE波入射 の場合に対して,
H波入射の場合が0.8
rv 1.2倍となり, ほとんど変わらないが, 再構成 像の誤差E門については, 1 rv 3倍になっている. これより H 波入射による再構成は,E波入射よりも不安定であり, 散乱波の測定の精度が同程度でも, 再構成像の誤差が大き くなるといえる.
図3.18は, max
(
nT)
= 1.6の円柱に対する, 式(2.6) における厳密な散乱波の展開係数-44-
雑音の影響を受けやすく
2.0 1.8 1.6 1.4 Max( nr)
1.2
' ,
H波入射の場合に係数が大きく,
Err
1e+00 1 e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( n r)
1.2
' ,
mが大きいところで なっている可能性がある.
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
を示す.
2.0 2.0
、、E,,ノ
LU
J'EE、、、(
a)
図3.17:雑音のある散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(H波入射)
0.
-
-
b 0
•
•
竜
一L一一」
14 m
n n.
r 1
1.6h
L_O.O�一一一 1.0L一一→川 」一一一→
o 1.0 p/λo 1.0 p/λ
lam I
1e+00
1e-02
1e-04
1e-06
E-wave( exact) -.._ー
1e-08
12 10 H-wave( exact)←
8 6 4 1 e-10 2
0
図3.18:散乱波の展開係数
-
45-
3.3.2 内側の屈折率が高い円柱の再構成-損失のあるとき-
次の例として, 自由空間中に置かれた, 損失のある4層円柱の再構成を考える. その円 柱の屈折率分布を図3.19に示す. ここでは, 屈折率の虚部の最大値(以後, max(ni) と記 す)を 0.2に固定する. 円柱の屈折率の実部および半径には, さまざまな値を設定する. 但
し, 次の関係を満たすものとする.
r l 二 γ1(5 -l)/4, (3.6)
ηrl 二 1
+{max(ηr) - 1}(l/4), (3.7)
nil = max( ni) (l /4), (l = 1γ・・,4) (3.8)
n r n
o r4ろr2 r1 p ハリ
r
A斗r
今3r qL r 0・
(a) The real part (b) The imaginary part
図3.
19:内側の層の屈折率が高い損失性4層円柱
観測散乱波として厳密な散乱波を用いた場合-E波入射
まず, E波入射で観測散乱波に雑音が含まれない場合を考える. 最終段階での散乱波の 平均二乗誤差Qおよび再構成像の誤差Errを図3.20に示す. この図からわかるように
-46-
ここで再構成を行ったすべての円柱に対して,[2は設定した収束判定値:ε1 10-7ま で最小化されている. 対応して, 解像限界のために精度が得られないη/入 < 0.5の小さ
い円柱を除くと, すべての円柱に対し,Errも小さくなっている. このことから, 損失の ある円柱に対しては, 先に示した損失のない円柱の不均質性の強い円柱に対する適用限界
{max(ηr)
-1}r1/入< 0.6の範囲を越えて, 屈折率の推定が可能であるといえる.第3.1節で述べたように, 屈折率ベクトルnの実部の変化に対する[2(n)の振動は, 損 失のあるところで, すなわち?ベクトルnの実部が 0から離れているところで小さくなる.
そのため, 関数の最適化の際に局所的最適解に留まりにくくなっていると考えられる.
Q Err
2.0 1.8 1.6 1.4 Max( nr) 1.2
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( nr) 1.2
r 1/入 2.0 r 1/入 2.0
(a)
J'EE、、 、、E,,ノ'hU図3.20:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差 (E波入射 )
観測散乱波として厳密な散乱波を用いた場合-H波入射
次に,H波入射で, 観測散乱波に雑音がない場合を考える. 反復アルゴリズムの最終段階 における, 散乱波の平均二乗誤差。および、再構成像の誤差Eけを図3.21に示す. 損失のな い円柱に対するH波入射の場合, 精度よく再構成できる範囲は,
{max(nr)
-1}γ1/入< 0.9 であった. しかし,損失のある円柱に対しては, E波入射と同じようにこの範囲を越えて,-47-
精度よく再構成できる. 但し E波入射および H波入射とも, 当然のことながら, 分解能 の改善はない.
Q Err
2.0 1.8 1.6 1.4 Max( nr) 1.2
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1 e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( n r)
1.2
' ,
r 1/入 2.0 r 1/入 2.0
(
a) 'o
、、11'ノ図3.21:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射)
観測散乱波に雑音がある場合-E波入射
次に, 観測散乱波に雑音が含まれる場合を考える. ここでは, SNRは 20dBと設定する.
E波入射の場合で 反復アルゴリズムの最終段階における散乱波の平均二乗誤差。および 再構成像Errを図3.22に示す. 雑音のある場合 QおよびEγγの値が 雑音のない場合
よりも大きくなるのは予想される通りである. しかし, ここでは, Eγγの値は, 損失のな い場合(図3.16)と比較して, 大きい値をとっていることがわかる.
観測散乱波に雑音がある場合-H波入射
次に, H波入射で, 観測散乱波に雑音が含まれる場合を考える. ここで, SNRは, 20dB に設定する. 再構成アルゴリズムの最終段階での, 散乱波の平均二乗誤差。および再構成 像の誤差Errを図3.23に示す. 雑音がある状況では 予想されるように, 0およびErr
-48-
Q Err
2.0 1.8 1.6 1.4 Max( n r) 1.2
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6 1.4 Max( n r) 1.2
r 1/入 2.0
r 1/λ 2.0
(
a)
、、1t'ノ唱。図3.22:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射)
Q Err
2.0 1.8 1.6 1.4 Max( nr) 1.2
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
1e+00 1e-01 1e-02 1e-03 1e-04 2.0
1.8 1.6
r 1/λ 2.0 r 1/λ 2.0
(
a) 、、I,,J'hU
図3.23:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(H波入射)
は雑音のない状況下と比較して, 大きい値をとる. 更に, Errは, 損失のある円柱に対し ては, 損失のない円柱に比べて大きい値をとっている. この再構成像の誤差Errは, E波 入射の場合と比較すると, H波入射の方が大きくなる傾向が見られる.
-49-
損失の大きさ
本項では, 屈折率の虚部(損失分)が異なる場合を考える. ここでは, 円柱の半径を1入に 固定し, 円柱の屈折率の実部および、虚部にさまざまな値を設定する. との場合も, 式(3.6)
-(3.8)の関係を満たすものとする.
まず, 観測散乱波に雑音がない場合を考える. 反復アルゴリズムの最終段階における散 乱波の平均二乗誤差。および再構成像の誤差Errを, E波入射およびH波入射に対して,
それぞれ図3.24, 3.25に示す. 屈折率の虚部(損失)がOでないとき, 屈折率の実部が大 きい部分まで平均二乗誤差。は十分最小化されており, 。の最小点を探索できていること がわかる. しかし, 屈折率の虚部(損失)が大きくなるにつれて, 再構成像の誤差Errは 大きくなっている. これは, 第3.1節で述べたように, 損失のあるとき, 屈折率の変化に対 する散乱パタンの変化が緩やかであり, そのため, 非常に精密に散乱波を整合しない限り,
正確な再構成が難しいことを意味している. ここで, 屈折率の虚部(損失)がOで屈折率の 実部が大きいところに, 0の値が非常に大きい部分が存在する. これは 無損失で不均質 性の強い円柱であり, 0の最小点に到達できず、極小点に留まったと考えられる.
図3.26, 3.27に, 観測散乱波に雑音が含まれる場合(SNR=20dB)の, 反復アルゴリズム の最終段階における散乱波の平均二乗誤差。および、再構成像の誤差Errを示す. 損失の大 きい円柱に対して, かなり 再構成像の誤差が大きくなっていることに注意を要する.
損失のある円柱の再構成例を図3.28に示す. 図中で, 実線および破線はそれぞれ再構成 値および真値を示す. 損失がない若しくは損失の小さい円柱に対しては, 再構成した屈折 率は, すべての層にわたって雑音による影響がほとんどない. その結果, 再構成値と真値 の差は概して小さくなっている. 一方, 損失が大きい円柱に対して, その差は多くなって いる. 特に, 物体の内側の層おいて雑音による誤差は大きくなっている. この理由は, 内 側の領域を通過した波は, 物体が損失性のため減衰して, 相対的に, 雑音に敏感になって いるためであると思われる.
このことから, 雑音のよる再構成像の精度の劣化は, 観測散乱波に含まれる雑音の強さ
-50-
に依存するのはもちろんであるが この他に, 物体の損失性にも依存することが明らかに なった.
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
Max(n;)
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( n r) 1.2
Max(n;)
、、EE,ノ 'hU 〆'ZE、、
図3.24:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(E波入射). rl/入= 1.0に固定.
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max(
n r) 1.2
Max(n;)
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr)
1.2
' ,
Max(n;)
、、EE,ノ 唱hu 〆't,、、、
図3.25:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射). rl/入= 1.0に固定.
-51-
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e抽08
2.0 1.8 1.6 1.4 Max( nr)
1.2
' ,
Max( nj)
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6
Max(ni)
市hu〆'a,、、
図3.26:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射). rl/入= 1.0に固定.
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( n r) 1.2
Max( nj)
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( n r) 1.2
Max(ni)
可hu
〆'tt、、
図3.27:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射). rl/入= 1.0に固定.
-52-
nr
1.4 1.2
1.0
0.0 0.5 1.0 p/入
nj
0.4 0.2 0.0
0.0
(a)無損失円柱
0.5 1.0 p/入
(max(ηr)
=l.4,町二0.0ぅr1/入= l.0;
n =7.84
x10-3, Err
=l.03
x10-2 )
nr
1.4 1.2 1.0
0.0 0.5 1.0 p/入
nj
0.4 0.2 0.0
0.0
(b)低損失円柱
0.5 1.0 p/入
(max(nr)
=l.4, max(ni)
=0.2,γ1/入二l.0;
n =3.56
x10-3, Err
=2.21
x10-2 )
nr
1.4 1.2 1.0
0.0 0.5 1.0
p/入
nj
0.4 0.2 0.0
0.0
(c)高損失円柱
0.5 1.0 p/入
(max(叫)二l.4,max( ni) = 0.4, r1/入二l.0; n =
2.87
x10-3, Err
=9.63
x 10-2 )図3.28:雑音のある散乱波を用いた再構成例(E波入射) . 実線は再構成値, 破線は真値を 示す
.
-53-
3.3.3
外側の屈折率が高い円柱の再構成-損失のないとき-
第3.3.1節, 第3.3.2節では 再構成する物体として内側の層で屈折率が高い円柱を扱っ た. 本節では, 異なる屈折率分布をもっ円柱として, 外側の層の屈折率が高い4層円柱の 再構成を考える. 外側の屈折率が高い場合, 円柱の表面での屈折率差が大きいので反射が 大きくなり, また, 内側で屈折率が低いため, 円柱の中心へ入射波が透過しにくい点から,
再構成が難しいといわれている. なお, 第3.6節で示すような生体モデルは内側の層で小 さい屈折率分布となっている.
最初に, 損失のない円柱の再構成を行う. 図3.29 に, 外側の層の屈折率が高い無損失4 層円柱の屈折率分布を示す. ここで, niの最大値をmax(ni)と記し, 0.0 に設定する. ま た, nrの最大値をmax(nr)と記す. ここで, 円柱の屈折率の実部および半径にさまざまな 値を設定する. 但し, 次の関係を満たすものとする.
T[
= Tl(5 - l)/4, (3.9)
ηrl 二 1+ {max(叫)-1}(5 - l)/4,
(3.10)
ηil 0, (l = 1,.・.,4). (3.11)
n
。
r 。γ
吋LY
内,3 λ且寸r'r
ハU ハリ A斗r
r
今、J r qL r ny
(a) The real part
/a・1、 LU 、‘,F'
T'n
em
aσb -EA - n
aw
p ad
図3.29:外側の層の屈折率が高い無損失4層円柱
-54-
観測散乱波として厳密な散乱波を用いた場合
まず, 観測散乱波が雑音が含まれない厳密な散乱波である場合を考える. 図3.30および 3.31に, それぞれE波入射およびH波入射の場合に対して, 反復アルゴリズムの最終段階に おける散乱波の誤差。および再構成像の誤差Errを示す. 図中で 入は自由空間中の波長を 示す. これらの図から, 無損失円柱のとき, E波入射に対して, ほぼ
{
max(
ηr)
-l}
rl/
入く 0.3, またH波入射に対して, ほぼ{
max(
ηr)
-l}
rl/
入<0.4の範囲で, 精度のよい再構成 像が得られている. 内側の屈折率が高い円柱の例と同じように, H波入射に対する適用範 囲はE波入射に対するものよりやや広くなっている.これらの適用範囲は第3.3
.1節で述べた内側の屈折率が高い円柱に対する適用範囲に比べ
て著しく小さくなっているように思われる. しかし, 軸対称円柱では外側の層が広い断面 積を持つので, すべての層にわたった平均屈折率は 外側の層が高い屈折率を持つ場合の 方が高くなる. この平均屈折率の差でみると, この2つの屈折率分布に対する差はほとん どないようである. これより, 円柱の断面積の比で平均した平均屈折率が一定であれば, 各 層の屈折率の分布が異なっても, 適用範囲は大きくは変化しないと考えられる.物体が小さく, rl
/
入く0.5 であるような場合にも, 再構成像の誤差は大きくなっている.これは, 解像限界であると考えられ, 内側の屈折率が高い円柱の例との変化はない.
観測散乱波に雑音がある場合
次に, 観測散乱波に雑音が含まれる場合を考える. ここで, 信号対雑音比
(
SNR)
は, 20dB に設定する. 再構成アルゴリズムの最終段階での, 散乱波の平均二乗誤差 。および、再構成 像の誤差Eけを, それぞれE波入射およびH 波入射の場合に対して, 図3.32, 3.33に示 す. 雑音が含まれる場合も, 厳密な散乱波から精度良く再構成できる範囲については, ほ とんどの場合, 精度よく再構成できている. 雑音がある場合, E波入射のよりもH波入射 の方が雑音の影響を受けやすいという結果が得られている. これは, 内側の屈折率が高い 例と同じである.-55-
Q 1e+00
1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
r 1/:λ 2.0
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max(nr) r 1/入 2.0 1.2
'hU 〆,ts‘、
図3.30:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(E波入射)
Q 1e+00
1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
r 1/λ 2.0
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr) r 1/入 2.0 1.2
、、,,,〆'hu 〆'z,、、、
図3.31:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射)
-56-
Q 1e+00
1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( n r) r 1/入 2.0 1.2
(
a)
1e+00 1e-01 1e・02 1e-03 1e-04 Err
2.0 1.8 1.6
2.0
、、1』,ノ
'D
図3.32:雑音のある散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射)
Q 1e+00
1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( n r) r 1/入 2.0 1.2
(
a)1e+00 1e・01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr)
1.2
. ,
r 1/λ 2.0
'hu 〆'zt、、
図3.33:雑音のある散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(H波入射)
-
5 7-
3.3.4 外側の屈折率が高い円柱の再構成-損失のあるとき-
次に, 外側の層が屈折率が高く損失のある4層円柱の 再構成を考える. その円柱の屈折 率分布を図3.34に示している. ここで, niの最大値をmax(ni)と記し,
0.2に固定する.
nr の最大値をmax(nr)を記す. ここで, 円柱の屈折率の実部および半径はさまざまな値 を設定する. 但し, 次の関係を満たすもの とする.
rl ニ ア1(5 -l)/4, (3.12)
nrl 1
+{max(ηr) -1}(5 -l)/4, (3.13)
nil = max( ni)(5 - l) /4, (l = 1,・. ,4) (3.14)
n
ny r qL r'
弓Jr'
d斗r
ハリny r q L r
今、J r
A斗rAU
( a) The real part (b) The imaginary part
図3.34:外側の層の屈折率が高い損失性4層円柱
観測散乱波として厳密な散乱波を用いた場合
まず, 観測散乱波が雑音が含まれない厳密な散乱波である場合 を考える.
図3.35および3.36に, それぞれE波入射およびH波入射の 場合に対して, 反復アルゴ リズムの最終段階での散乱波の平均二乗誤差Qおよび再構成像の誤差Errを示す. 内側の
-58-
屈折率が高い損失性円柱に対しては, 無損失円柱に対する適用範囲を越えて非常に不均質 の強い円柱まで正確に再構成することができた. ここで 外側の屈折率が高い損失性円柱 に対しては, max
( nr)
> 1. 7の領域に正確に再構成できていない領域が存在する. しかし,無損失円柱に対する適用限界は越えており, この例においても, 損失のあるとき高い屈折 率まで再構成ができることがわかる.
観測散乱波に雑音がある場合
最後に, 観測散乱波に雑音が含まれる場合を考える. ここで, 信号対雑音比
(
SNR)
は,20dBに設定する. 再構成アルゴリズムの最終段階での, 散乱波の平均二乗誤差。および 再構成像の誤差Erγを図3.37. 3.38に示す. 雑音状況においても 雑音のないときに精度 良く再構成できる範囲については ほとんどの場合 精度よく再構成できている. 内側の 屈折率が高い例と同じように, 無損失物体より損失性物体の方が影響を受けやすい結果が 得られている.
-
59
-Q 1e+00
1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( nr) r 1/入 2.0 1.2
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04
r 1/入 2.0
、、tl,ノ'hU 〆'zt、、
図3.35:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(E波入射)
Q 1e+00
1 e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( n r) r 1/入 2.0 1.2
、、EE,,,LU /,EE‘、
図3.36:厳密な散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射)
-60-
Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( n r) 1.2
r 1/λ 2.0
(
a)
1e+00 1e-01 1e暢02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr) r 1/入 2.0 1.2
\11ノLU
J,,,‘、、
図3.37:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(E波入射)
Q 1e+00
1 e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6
r 1/入 2.0
(
a)
1e+00 1e・01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( n r) 1.2
r 1/入 2.0
、、E,,ノ唱huf'『E、、
図3.38:雑音のある散乱波を用いた損失性円柱の再構成における散乱波の平均二乗誤差お よび再構成像の誤差(H波入射)
-61-
3.4 分割数の固定
前節までは, 第2.4節で述べたアルゴリズムに従い 最初円柱を均質と仮定しておいて,
次第に層数を増やしながら内部の屈折率分布を再構成した結果を示した. 本節では, 層数 を増やしながら再構成する手法の有効性を確認するため 層数を初めから固定して再構成 した結果を示す.
ここでは, 内側の層が高い屈折率をもっ無損失モデル(図3.12)のみを考える. 観測散乱 波は雑音のない厳密な散乱波を用いている. 最初から円柱を, 4層に分割して再構成する ものとし, 全ての層で屈折率ベクトルの初期値は1 . 0+ iO.Oを用いた. なお, 0の一回微 分が\70<ε2 = 1 0-7になった時点で終了した.
図3.39, 3.40に, それぞれE波入射, H波入射に対して, 終了時における散乱波の平均 二乗誤差。および再構成像の誤差Errを示す. 円柱の分割数を1→2→4と次第に増 やしながら再構成を行った例(図3.13, 3.15)と比較すると, 再構成ができる範囲が小さい.
これより, ここで用いた分割数を次第に増やしながら再構成を行う手法は, 高い屈折率を 持つ物体に対して有効であることがわかる.
-62-
Q
1e+00 1 e-01 1e-02 1e-03 1e-04 1e-05 1e-06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( nr) r 11入 2.0 1.2
(
a)
1e+00 1e-01 1e-02 1e-03 1e・04
r 11入 2.0
、、B』,〆しUJ'tt、、、
図3.39:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(E波入射)
.
再構成の際, 円柱の層数を4に固定している.Q
1e+00 1e-01 1e-02 1e-03 1e-04 1e-05 1e・06 1e-07 1e-08
2.0 1.8 1.6 1.4 Max( nr) r 11入 2.0 1.2
(
a)
1e+00 1e-01 1e-02 1e-03 1e-04 Err
2.0 1.8 1.6 1.4 Max( nr) r 11入 2.0 1.2
、、s,,J 'hU 〆'es、、
図3.40:厳密な散乱波を用いた無損失円柱の再構成における散乱波の平均二乗誤差および 再構成像の誤差(H波入射). 再構成の際, 円柱の層数を4に固定している.
-63-
3.5 3層円柱
これまで, 4 層円柱の屈折率分布を再構成してきた. 本手法は, 1→2→4・・・と層数 を増やしながら屈折率を再構成していくものであるので, 4層円柱では再構成の際に設定 した境界とモデルの境界が一致していた. 本節ではモデルにおける境界が再構成の際に一 致しない例として3層円柱を取り上げる. 円柱の半径は 1入とし, 円柱の外部は自由空間 とする. なお, E波入射のみを考える.
3層円柱に対する再構成例を図3.41 に示す. モデルの屈折率は破線で示している. ここ では, 一回の反復(直線探索)でのQの変化ムQがム[2<ε2であるとき, 円柱の分割数を 増やし, 1→2→4→8→16 とN= 16まで増やして再構成を続けた. このとき,[2は 設定した収束判定値引(= 10-7) よりも小さくなり, 平均的にみて真値に近い再構成像を得 ている.
この図で, 16分割時の再構成値は, 8分割時の結果とほとんど差がない. 16分割時では,
一つの層の厚みが入/8以下になっており, 解像限界に達していると考えられる. このよう に, 一つの層の厚みが入/8 に達すると, 屈折率の推定が困難となり, [2の値を小さくして も, 再構成像の精度は上がらなくなる. 従って, 円柱の層が未知であるときは,一つの層 の厚みが入/8程度で層数の増加を打ち切るのが妥当と思われる.
-64-
0.5 1 ρ/λ
(
a) N =1,。二8.37
X10-2 0.3
0.5 1 0 0.5 1
ρ/λ ρ/λ
(b) N =2,
n= 2.69
x10-2
2 ↓
• • • • , •� 0.3
0.5 1 0 0.5 1
ρ/入 ρ/λ
(
c) N =4,
n= 4.04
x10-3
2ト , .
� 0.3
2
c '
トーーーーー、
』ーーーーーー
0.3
c
1.5
LnU AEE
ーーーーー-
L 0.2 0.1
ーーーー--"2
c ‘
C '
C L国
nU Lnu 」ーーー
0.5 1 ρ/λ
C
0.2 0.1
c
0.2 0.1
C
0. 2 0.1
0.5 1 0 0.5 1
ρ/λ ρ/λ
(d)N=16,。二9.31 X 10-8
図3.41: 3層円柱の再構成
-65-
3.6 生体への応用
本節では, 生体の組織に近い屈折率をもっモデルを取り扱う. ここで考えるモデルは,
図3.42 に示すように二つの組織 (骨, 筋肉)から構成される. これは, マイクロ波でヒトの 腕の断面を診断するという応用を考慮したものである. 用いる周波数を 3 GHzとすると,
骨, 筋肉, 水の屈折率は, それぞれ 2.84+ iO.212, 6.84 + iO.877, 8.76 + iO.822 である[27].
このように , 骨や筋肉の屈折率は, これまでに調べた円柱の屈折率と比較するとかなり 高く, 真空中に置かれた場合, その屈折率を推定するのは困難である. しかしながら, 屈 折率の高い物体の物体を再構成する場合, 外部の物質として屈折率の高いものを用いると 精度よく再構成できる例が報告されている[27,28]. ここでも, それに従い, 外部の媒質は 水とする.
以下, 半径の異なる 3つのモデル, つまり, α= 0.3入(3cm), 0.5入(5 cm), 0.7入( 7cm)につ いて考える. 但し 本節では, 入は真空中の波長である. E波入射のみを考え, 観測散乱 波は厳密な散乱波とする. とこでは, ベクトルnの初期値は外部の媒質である水の値を用 いた. その再構成像を それぞれ図3.43-3. 45に示す. 図中で, 実線は再構成値, 破線は真 値を示す. この3つの例では, 再構成値は真値とよく一致している.
骨 筋肉
←一一 水
2.84+ iO.212 6.84+ i 0.877 8.76+ iO.822
図3.42:ヒトの腕のモデル