消防活動が困難な空間における
消防活動支援情報システムの開発
報 告 書
平成
16年3月
消防活動が困難な空間における消防活動支援
情報システムの開発検討会
目 次
1.背景と目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1-1 背景・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1-2 目的・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 1-3 開発研究体制・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1 (位置特定センサ部の小型軽量化等の開発に関するワーキンググループ) 2.位置特定センサ部の小型軽量化等の開発・・・・・・・・・・・・・・・・・・・4 2-1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4 2-2 平成15年度の開発の目標・・・・・・・・・・・・・・・・・・・・・・・・4 2-3 消防隊員の位置特定システムの開発・・・・・・・・・・・・・・・・・・・・4 2-3-1 構成・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・8 2-3-2 本年度の改良点・・・・・・・・・・・・・・・・・・・・・・・・・・14 2-4 実証実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・17 2-4-1 慣性装置としての精度結果・・・・・・・・・・・・・・・・・・・・・17 2-4-2 歩行データとしての精度結果・・・・・・・・・・・・・・・・・・・・19 2-5 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・21 2-5-1 成果と問題点・・・・・・・・・・・・・・・・・・・・・・・・・・・21 2-5-2 実用化への取り組み・・・・・・・・・・・・・・・・・・・・・・・・21 2-6 付属書類・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・21 1) 慣性装置構造図・・・・・・・・・・・・・・・・・・・・・・・・・・・22 2) 慣性装置結線図・・・・・・・・・・・・・・・・・・・・・・・・・・・27 3) 演算基板結線図・・・・・・・・・・・・・・・・・・・・・・・・・・・28 4) 慣性センサ制御基板結線図・・・・・・・・・・・・・・・・・・・・・・29 5) INS/DGPS/VMS Integration In-Motion Alignment・・・・・・・・・・・・30(電子タグの仕様作成及び情報通信システムに関するワーキンググループ) 3.情報通信システム・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 3-1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 3-2 FiReCOS とは・・・・・・・・・・・・・・・・・・・・・・・・・・・・・39 3-3 災害発生時のインフラ網の想定・・・・・・・・・・・・・・・・・・・・・40 3-3-1 ネットワークの分類・・・・・・・・・・・・・・・・・・・・・・・・40 3-3-2 地下空間におけるネットワーク敷設の要件・・・・・・・・・・・・・・41 3-3-3 アドホックネットワーク・・・・・・・・・・・・・・・・・・・・・・42
3-4 開発ターゲットの設定・・・・・・・・・・・・・・・・・・・・・・・・・42 3-4-1 可搬型セルステーション (HCS)・・・・・・・・・・・・・・・・・42 3-4-2 VDSL・・・・・・・・・・・・・・・・・・・・・・・・・・・・・43 3-4-3 アドホックネットワーク (AODV)・・・・・・・・・・・・・・・・43 3-5 可搬型セルステーション(HCS)の試作・・・・・・・・・・・・・・・・44 3-6 基礎実験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・45 3-6-1 消費電流測定・・・・・・・・・・・・・・・・・・・・・・・・・・・45 3-6-2 バッテリー寿命試験・・・・・・・・・・・・・・・・・・・・・・・・46 3-6-3 通話品質試験 ①(無線LAN回線と通話品質の関係)・・・・・・・・・47 3-6-4 通話品質試験 ②(PHS回線と通話品質の関係)・・・・・・・・・・・48 3-6-5 移動通話試験・・・・・・・・・・・・・・・・・・・・・・・・・・・49 3-6-6 実験結果・・・・・・・・・・・・・・・・・・・・・・・・・・・・・49 3-7 考察・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・51 3-7-1 消費電力 (実験 3-6-1 の結果より)・・・・・・・・・・・・・・・・・51 3-7-2 バッテリー寿命 (実験 3-6-2 の結果より)・・・・・・・・・・・・・・51 3-7-3 無線LAN回線における通話品質の関係 (実験 3-6-3 の結果より)・・・52 3-7-4 PHS回線における通話品質の関係 (実験 3-6-4 の結果より)・・・・・53 3-7-5 移動通話試験 (実験 3-6-5 の結果より)・・・・・・・・・・・・・・・54 3-8 実証実験・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・56 3-8-1 システム構成・・・・・・・・・・・・・・・・・・・・・・・・・・・56 3-8-2 システム導入効果・・・・・・・・・・・・・・・・・・・・・・・・・58 3-9 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・58 3-9-1 HCSの小型・軽量化・・・・・・・・・・・・・・・・・・・・・・・58 3-9-2 自動火災報知設備通信線の幹線化・・・・・・・・・・・・・・・・・・59 参考資料1 消防活動支援のための情報通信システムに関する既存設備・・・・・・60 参考資料2 CRLの開発する災害時用ネットワークシステムのための 動的ルーチングソフトウェアの概要・・・・・・・・・・・・・・・63 4.電子タグによる位置補正システム・・・・・・・・・・・・・・・・・・・・・68 4-1 はじめに・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・68 4-2 採用が可能と考えられる電子タグシステムの現状・・・・・・・・・・・・・68 4-3 仕様策定のための方針について・・・・・・・・・・・・・・・・・・・・・70 4-4 関係業界における電子タグの標準化作業について・・・・・・・・・・・・・70 4-5 消防活動支援情報システム用電子タグの仕様例・・・・・・・・・・・・・・72 4-6 開発方策について・・・・・・・・・・・・・・・・・・・・・・・・・・・73
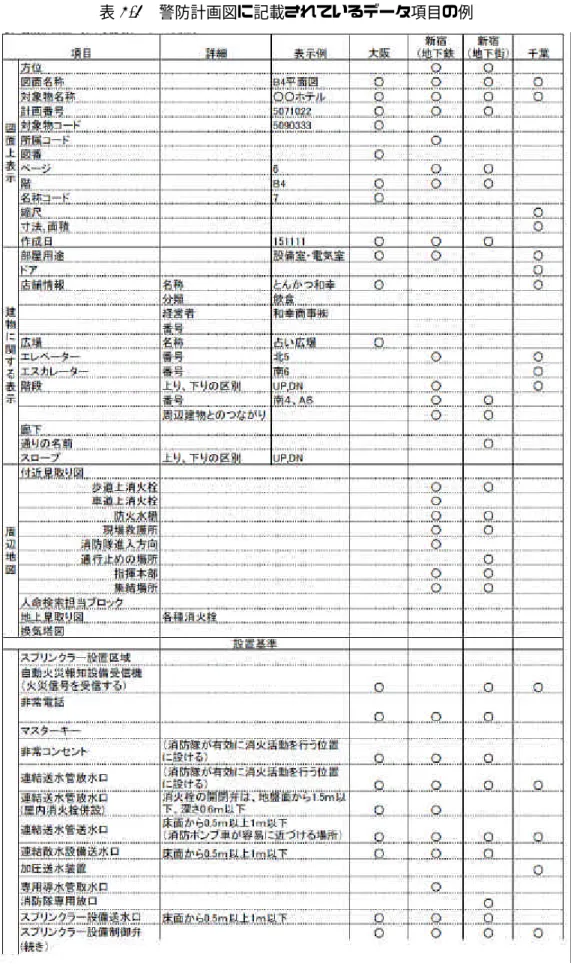
(3次元数値地図の仕様と作成に関するワーキンググループ) 5.3次元数値地図の仕様と作成に関するガイドライン・・・・・・・・・・・・・75 5-1 ガイドラインの概要・・・・・・・・・・・・・・・・・・・・・・・・・・75 5-2 3次元数値地図の利用目的から見た優先度の考え方・・・・・・・・・・・・75 5-3 3次元数値地図のデータ項目とデータ構造・・・・・・・・・・・・・・・・77 5-3-1 必須項目とデータ精度・・・・・・・・・・・・・・・・・・・・・・・77 5-3-2 選択項目とデータ精度・・・・・・・・・・・・・・・・・・・・・・・78 5-3-3 データ構造 (データスキーマ)・・・・・・・・・・・・・・・・・・・80 5-4 3次元数値地図の作成手法の例・・・・・・・・・・・・・・・・・・・・・85 5-4-1 警防計画図から作成する方法・・・・・・・・・・・・・・・・・・・・85 5-4-2 竣工図からの作成方法・・・・・・・・・・・・・・・・・・・・・・・95 5-4-3 3次元数値地図データのメンテナンス・・・・・・・・・・・・・・・・99 5-5 まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・100 6.まとめ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・101 6-1 隊員位置特定システムの小型・軽量化・・・・・・・・・・・・・・・・・101 6-2 情報通信方式・・・・・・・・・・・・・・・・・・・・・・・・・・・・102 6-3 電子タグによる位置補正システム・・・・・・・・・・・・・・・・・・・103 6-4 3次元数値地図の仕様と作成に関するガイドライン・・・・・・・・・・・104
1
1. 背景と目的
1-1. 背景 大深度地下、道路トンネル、地下鉄道、地下街及び地中の工事現場等は、①火災・事故 時は非常用電源があっても照明が有効でなくなることもあること、②地下であるため進入 路が限定されること、③煙の流動方向と消防活動の進入方向が逆行すること、④構造物外 部からの情報収集が困難であること等により、消防活動が困難な空間である。 しかし、このような消防活動が困難な空間において火災、事故等が発生した場合であっ ても、消防機関は救助及び消火活動を行うことが求められている。 このため、本開発研究は、消防隊員の安全を確保しつつ、その消防活動を迅速かつ円滑 な支援を行うためのものであり、より高度なシステムの開発が必要である。 1-2. 目的 本開発研究では、平成13年度に実施された「大深度地下等における消防隊員の位置特 定システムの開発」及び平成14年度に実施された「消防活動が困難な空間における消防 活動支援情報システムの開発」の成果を踏まえつつ、実用機器に近づけるために小型軽量 化すること。さらに高度な技術を活用することにより、より消防活動の困難な場所におい ても活用できる機器を開発しようとするものである。 1-3. 開発研究体制 本研究開発は、財団法人日本消防設備安全センターが総務省消防庁から委託を受け、同 センター内に「消防活動が困難な空間における消防活動支援情報システムの開発検討会」 (以下、「検討会」と言う。)を設置した。 メンバーを下記に示す。 委員長 柴崎亮介 東京大学 空間情報科学研究センター 教授 副委員長 松原美之 独立行政法人 消防研究所研究企画部 部長 委員 清水英範 東京大学大学院 工学系研究科 教授 〃 石井弘充 日本大学理工学部 教授 〃 瀬崎 薫 東京大学 空間情報科学研究センター 助教授 〃 加藤聰彦 電気通信大学大学院情報システム学研究科 助教授 〃 熊谷 誠 総務省情報通信政策局宇宙通信政策課宇宙通信調査室 課長補佐 〃 千田 淳 総務省消防庁特殊災害室 室長 〃 ※ 北出正俊 総務省消防庁特殊災害室 室長 〃 塩谷映雄 総務省消防庁特殊災害室 課長補佐 〃 鈴木康幸 総務省消防庁予防課 設備専門官(併)課長補佐2 委員 細川直史 総務省消防庁防災情報室 課長補佐 〃 滝澤 修 独立行政法人通信総合研究所非常時通信グループ 主任研究員 〃 田村裕之 独立行政法人消防研究所基盤研究部 主任研究官 〃 能瀬俊明 千葉市消防局予防部 部長 〃 齋藤誠二 東京消防庁消防科学研究所 所長 〃 田中辰雄 名古屋市消防局防災部 部長 〃 大北雅史 大阪市消防局警防部 部長 〃 小山敦夫 社団法人日本照明器具工業会 専務理事 〃 小林茂昭 財団法人日本消防設備安全センター 常務理事 なお、開発を効率的に進めるために検討会の下に3つのワーキンググループを設置した。 (1) 位置特定センサ部の小型軽量化等の開発に関するワーキンググループ 主査 柴崎亮介 東京大学 空間情報科学研究センター 教授 委員 塩谷映雄 総務省消防庁特殊災害室 課長補佐 〃 田村裕之 独立行政法人消防研究所基盤研究部 主任研究官 〃 飯塚正幸 東京消防庁消防科学研究所第一研究室 室長 〃 ※ 崎野新一 東京消防庁消防科学研究所第一研究室 室長 〃 熊谷秀夫 多摩川精機株式会社特機技術部慣性技術課 技監 (2) 電子タグの仕様作成及び情報通信システムに関するワーキンググループ 主査 松原美之 独立行政法人 消防研究所研究企画部 部長 委員 瀬崎 薫 東京大学 空間情報科学研究センター 助教授 〃 加藤聰彦 電気通信大学大学院情報システム学研究科 助教授 〃 鈴木康幸 総務省消防庁予防課 設備専門官(併)課長補佐 〃 石井幸一 総務省消防庁特殊災害室 課長補佐 〃 細川直史 総務省消防庁防災情報室 課長補佐 〃 滝澤 修 独立行政法人通信総合研究所非常時通信グループ主任研究員 〃 田村裕之 独立行政法人消防研究所基盤研究部 主任研究官 〃 三輪弘光 名古屋市消防局防災部情報指令課 課長 〃 小山敦夫 社団法人日本照明器具工業会 専務理事 (3) 3次元数値地図の構築に関するワーキンググループ 主査 柴崎亮介 東京大学・空間情報科学研究センター 教授 委員 清水英範 東京大学大学院 工学系研究科 教授 〃 熊谷 誠 総務省情報通信政策局宇宙通信政策課宇宙通信調査室 課長補佐 〃 石井幸一 総務省消防庁特殊災害室 課長補佐
3 委員 細川直史 総務省消防庁防災情報室 課長補佐 〃 田村裕之 独立行政法人消防研究所基盤研究部 主任研究官 〃 粟飯原俊夫 千葉市消防局予防部指導課 課長 〃 中西正則 大阪市消防局警防部計画情報課 課長 〃 永嶋英行 財団法人建築行政情報化センター 研究開発主幹 事務局 大嶋文彦 総務省消防庁特殊災害室 係長 〃 神 忠久 財団法人日本消防設備安全センター 特別参与 〃 片岡正弘 〃 調査役 (※:途中退任の委員)
4
(位置特定センサ部の小型軽量化等の開発に関するワーキンググループ)
2.位置特定センサ部の小型軽量化等の開発
2-1. はじめに 消防活動が困難な空間において火災、事故等が発生した場合であっても、消防機関は救 助及び消火活動を行うことが求められている。本WG による開発研究は、そうした消防活 動が困難な空間において隊員の位置を常に把握し、消防活動を支援することのできるシス テムを開発することにある。今年度は平成14 年度までの成果を踏まえつつ、さらに高度な 技術を活用することにより、より小型で使用性の高いものを開発しようとするものである。 すなわち、平成14 年度までには、隊員の位置を把握する方法として慣性航法装置を用いた 自律的な位置特定システムの開発研究を行い、精度面では良好な結果を得たが、装置の大 きさなど使用性の点で改善の余地があった。平成15 年度は慣性航法装置の一層の小型化等 を図り、実際の現場で使用しやすいものとする。 2-2. 平成 15 年度の開発の目標 平成15 年度は下記の要件を満足することを目的として開発を行った。 1) 重量を 1/2 以下にする。(9Kg→4.5Kg 以下) 2) 装着後の活動の容易さを考慮した筐体デザインとする。 ・ 筐体のデザインを機能的な構造設計に基づく使いやすい筐体デザインとする。 3) 初期化に要する時間を短縮する。 ・ 初期値入力方法を従来のペン入力方式から電子タグによる入力に変更する。 ・ 消防自動車のカーナビデータとリンクさせ、カーナビなどからの速度信号から 慣性装置の方位角や位置情報をセットする方式とし、初期化(アライメント) を現場で行う必要がないように配慮する。 4) 通信装置や電子タグ読み取り装置の内蔵化は考慮するが、今年度の設計には反映せ ず昨年度までの無線LAN と電子タグリーダを対象とする。 2-3. 消防隊員の位置特定システムの開発 平成15 年度の開発目標に従って小型で軽量な位置特定センサを開発すべく、その基本 的な開発方針を次のように設定した。 1) 小型軽量化 平成14年度に開発した位置特定システムでは、比較的精度の高いリングレーザ ージャイロ(RLG)とサーボ加速度計を使用する必要があったため、外形・重量が 大きく消防隊員が携帯できる装置としては問題があった。そこで平成15年度はそ5 れを大幅に改善することを目標として開発に着手した。しかし現在の慣性センサ技 術では、精度を維持し小型軽量化するには特別な技術的ブレークスルーが無い限り 不可能であるが、幸いに今日では下記の理由により若干の精度低下はあるものの小 型軽量化が図られつつあり、本年度はその技術を流用し小型化する結果となった。 ・ 飛翔体の位置検出における精度向上要求により多くのRLG システムが使用さ れる環境になり、小型軽量化が実現している。 ・ 外形を決定する第一の要素であるRLG のガラスブロック周辺部分が簡素化さ れ、全体的な小型になった。 ・ RLG を制御する電子回路が近年の電子部品の改良に伴って大幅に小型化され、 またASIC 等の採用により回路構成を省スペースで実現できるようになった。 ・ RLG を含む内部の構成部品の配置を再検討し、省スペース設計を行なった。 ・ RLG に使用するミラーの歩留まりを改善することで、全体的な精度向上を行 なった。 ・ 上記精度向上でも達成できない部分については、詳細な温度補正を行なうこと で精度を維持する。 ・ RLG 精度が影響する方位精度については、外部から入力する方法に変更し、 精度低下による影響を極力排除した。 これらの改善項目をまとめると図3-1 のようになる。
6 図3-1. 開発の方針 2) アライメント時間の削減 平成14年度器材は、慣性装置としては従来と同様の使い方を行なったため、慣 性装置として必須のアライメント動作(真北を計測する動作)を行なっている。こ れは RLG 固有のランダムノイズの影響で方位が変化することを防ぐための平均化 時間であり、通常5∼8分必要である。しかし、実際の現場ではそのような時間は 無駄であり本装置の運用における最大の問題である。実用化に向けては、後述の移 動アライメントあるいは相当の行為により現場ではアライメントを行なわないこと を考えており(これが移動中アライメントであるが)、本年度の開発では既に方位が 分かっていることを前提とした。 実運用では現場での使用開始前、既に装置に電源が投入され動作状態にあり即座 に使用できるが、今回は初期の自己診断等2分程度時間を必要とする。この時間は、 車両の運転時間に含まれるものとする。 3) 低消費電力化 慣性装置の小型軽量化 外部入力方位 ジャイロバイアスの 影響を少なくする ミラーの歩留 まり改善 同じサイズで RLG の精度維持 ガラスブロック 周辺の簡素化 RLG 制御回路の 小型化 内部構成品の 構造変更 温度補正の 精密化 RLG システムの飛翔体への採用による量産
7 慣性装置の小型化に伴いその消費電力も削減されている。平成 14 年度での消費 電力(40W)に比較し、今回の開発品は約 20W であり概ね半分に低減されている。リ チウムイオンバッテリー(0.8AH)を使用し、重量 750g であり、総合重量 3.0Kg とな る。昨年度の 7.5Kg を予定通り半分にすることができている。連続動作時間も約 1.0H となっており、運用には十分と思われる。 4) 空気ボンベ携帯機への組み込み 慣性装置を空気ボンベへ分解組み込みの案に対しては、具体的な案の考案が難し かった為、当面はZUPT/CUPT (Zero Velocity Update)/(Coordinate Update)(P13 参照)スイッチも含めて人間工学的な部分は、実用試作での開発で行なうことにな った。しかしバッテリの取り付けに関しては、本年度の試作において明確にするこ とが重要と考え、空気ボンベのストラップに装着することにした。 5) 操作性の向上 平成14 年度の開発においては、慣性装置の精度保証のための ZUPT を行なうス イッチを工業デザイナとともに検討した。その方式は、装置自体が空気ボンベとそ の背負子に装着されることから、背負子の肩ベルト(右側)にスイッチを装着するこ とになった。しかし本年度中の開発はそのスイッチの製作が難しいとの観点から、 従来のペンコンピュータによるマンマシンインターフェイスとすることになった。 ZUPT、CUPT の警報 図3-2. 将来の装着イメージ
8 2-3-1. 構成 2-3-1-1. ハードウエア構成 本 年 度 開 発 し た 装 置 の ハ ー ド ウ エ ア 構 成 を 図 3-3 に 示 す 。IMU(Inertial Measurement Unit)は T-16B と称する RLG であり、その詳細は後述する。それ を IMU 制御回路で制御しそこから得られる角速度(角度増分)、加速度(速度増分) のシリアル信号を受信回路で受信する。これにより航法演算プログラムにデータ を引き渡すことが出来る。従来はこの部分の処理と演算の処理を別のCPU で行な っ て い た が 、 本 年 度 は 日 立 製 の プ ロ セ ッ サ SH-4 で全てを実行している。 ZUPT/CUPT のコマンドは、CPU に接続されたシリアル入出力(SIO:Serial Input / Output)とペンコンピュータを接続し、従来と同様な運用とした。本年度はこの IMU 制御回路基板と演算用基板を新規に設計し、その妥当性を確認後、新規演算 用ソフトウェアを開発した。
9 図3-3. システムの全体構成 MPU SIO0 SRAM FRASH D/A バッテリ ±15V,5V 日立 受信ロジック T-16B IMU MRLG ACC IMU 制御回路 LAN 電子タグ PCMCIA RS232C PC IMU 制御回路 MRLG パスレンス制御 ディザー制御 出力カウントの読み取り 加速度信号のV/F レーザー共振制御
10
11 演算基板 慣性センサ 慣性センサ制御基板 電源装置 演算基板 上面から見た図 開発した装置の内部状況 側面から見た図 図3-5. システムの内部構造
12 2-3-1-2. ソフトウエア構成 2-3-1-2-1. 本装置の純慣性ソフトウエア構成を下図に示す。 本装置の基本ソフトウエアは純慣性アルゴリズムとペンコンピュータによる補正処理 である。純慣性アルゴリズムは上記のようなループを描く処理であり、今回は100Hz で動 作している。本年度のソフトウエアは、上記初期姿勢角は慣性センサで求め、真方位角と 初期位置は外部入力としているのが特徴である。それぞれの概説を示す。 1) 角速度増分 コンピュータによる演算処理を行なうために、角速度信号を離散化した信号(角度増 分)である。 2) クォータニオン積算 4次元法を使って、方向余弦ベクトルに使用する4次元数を計算する。 加速度増分 角速度増分 クォータニオン積算 方向余弦 算出 座標変換 姿勢角 算出 速度算出 コリオリ補正 重力補正 相対角速度 算出 緯度・経度 真方位算出 自転角速度算出 補正角速度算出 + − 図3-6.純慣性アルゴリズム 初期位置・真方位 初期姿勢
13 3) 方向余弦算出 得られた四次元数から、方向余弦を生成する。 4) 姿勢角算出 得られた方向余弦から、姿勢角並びに方向余弦を計算する。姿勢角はロール角/ピッチ 角、方位角は相対方位角である。 5) 加速度増分 コンピュータによる演算処理を行なうために、加速度信号を離散化した信号(速度増 分)である。 6) 座標変換 いわゆる装置3軸の加速度を方向余弦を用いて、局地水平座標の加速度に分解するた めの座標変換である。 7) コリオリ補正・重力補正 地球の自転角速度と速度により発生するコリオリ力の補正と地球に存在する重力加 速度の補正を行なう。 8) 速度算出 補正された加速度を積分して、局地水平面の速度を算出する。 9) 相対角速度計算 任意の速度で地球上を移動する時の地球に対する角速度を計算する。 10) 緯度・経度・真方位計算 地球に対する相対移動角速度を積分し、移動角(緯度・経度)を計算するとともに、予 め決められた北からの方位角(真方位角)の移動による変動分を計算する。(自由方 位座標計算) 11) 自転角速度算出 緯度・経度・方位角情報から、局地水平面の各軸での自転角速度を計算する。 12) 補正角速度算出 自転角速度と相対角速度を加算し、方向余弦の逆行列で装置3軸の角速度に変換し、 入力角速度に補正を加える。 2-3-1-2-2. ZUPT/CUPT による補正演算 1) ZUPT による補正(速度ゼロ補正) 装置が停止していることを基準に慣性装置の誤差を補正する手法である。通常慣 性装置の速度誤差はそのトレンドが決まっており、停止時における慣性装置の速度 誤差信号を使って、それを積分して得られた位置誤差を計算できる。 2) CUPT による補正(座標値補正) 装置がある既知の場所を通過した場合に、慣性装置の位置を修正する方式で、本
14 システムでは、電子タグによる位置補正が行なわれる。 2-3-2. 本年度の改良点 平成15 年度は平成 14 年度の実績を踏まえ装置の小型化を中心に開発を行なった。 その詳細に関して解説する。 2-3-2-1. 慣性センサ 本装置で開発した慣性センサの特性と昨年度使用した慣性センサの特性を下記 に示す。
表3-1. ジャイロ(MRLG:Monolithic Ring Laser Gyro)(1σ)
仕様諸元 平成14 年度 平成15 年度 バイアス 0.03 deg/h 0.2 deg/h スケールファクタ 150 ppm 150 ppm ランダムウォーク 0.008 deg/h 0.05 deg/h
図3-6. Monolithic Ring Laser Gyro
表3-2. サーボ加速度計(1σ)
仕様諸元 平成14 年度 平成15 年度
バイアス 300 μG 300 μG
15 図3-7. サーボ加速度計 3 軸 開発に係わる技術的変更点 1) ガラスブロックに使用されるミラーの表面粗さ精度を緩和した。これにより レーザーの後方拡散量が増加し、ロックインレートが増大するため、ディザ ー角速度を大きくしたのが原因で、ランダムウォークノイズが増加した。こ れはアライメント時間の増加に繋がるが、運用でカバーした。同時にバイア ス再現性も悪化するが、細かい温度補正と運用によりカバーした。 補足1:「ディザー角速度」 リングレーザージャイロは左右に回転する光の干渉により角速度を検出 するため、あえて左右に回転をあたえて速度差をつける機能がディザーとよ ばれており、その大きさがディザー角速度である。 補足2:「ランダムウォークノイズ」 どのような信号も精度を上げるとノイズが見えるが、適当な周波数を持 った有色ノイズである場合と周波数依存性のない白色ノイズの場合がある。 この白色ノイズの信号を積分すると周波数に依存しない動きになり、この動 きのことをランダムウォークノイズという。 2) レーザー部品の簡素化(アノード取り付け方法、リード線処理、バラスト抵 抗の取り付け方法)をはかりガラスブロック全体を小型化した。 3) 加速度計を小型化し、全体の小型化とのバランスをとった。 サーボ加速度計 1 軸分
16 日立SH-4
図3-8.開発した慣性センサ制御回路
17 2-3-2-2. 演算処理 本装置では、初期化におけるアライメント演算を行なわず外部入力による初期化 を採用している。ペンコンピュータからの初期位置と真方位零の情報を使って慣性 演算を初期化し(実際には方位零の方向に慣性センサを固定し、そこから演算を開始 する)位置の計算を行なった。 2-3-2-3. 初期値入力 将来消防車両に取り付けた GPS 等により初期値データが得られるものとして、 今回はペンコンピュータによる初期値入力方法とした。実運用においては、概ね2 Km 以内の初期値であれば、慣性装置の精度劣化には繋がらないため、概略の値で 初期化しておいて電子タグの最初のデータで正確な位置に更新できる。 2-3-2-4. アライメント時間 平成14 年度では慣性センサの信号を用いてアライメントを行い真方位を検出し たが、本装置においては車両搭載中にアライメントを行なうこと(その方法自身に は議論が必要であるが)により、現場でのアライメントが不要となる。そこで、本 装置ではアライメント機能は削除した。 2-3-2-5. データ記録機能 平 成 14 年度の装置と同様にペンコンピュータによる計測位置の格納と ZUPT/CUPT による補正を行なった。 2-4. 実証実験結果 2-4-1. 慣性装置としての精度結果 実証実験として、先ず慣性センサの精度確認を行なった。方位零に設定し、そのと きの純慣性精度を計測した。計測はZUPT 間隔単位であることを前提に、2分間の計 測を行なった。結果を表4-1 に示す。
18 表4-1. 純慣性精度計測結果(m) 回数 緯度方向誤差 経度方向誤差 上下方向誤差 1 1.15 1.48 0.03 2 2.07 -2.56 -0.06 3 0.83 2.23 -0.08 4 1.04 -0.77 0.1 5 2.4 1.14 0.08 RMS 1.62 1.77 0.07 RMS:平均二乗誤差
バッテリー
開発した慣性装置
ペンコンピュータ
図
4-1.
試験風景
19 2-4-2. 歩行データとしての精度結果 多摩川精機(株)構内を使用し二点間を往復することにより、誤差の蓄積状況を測定し、 精度を確認した。このとき、ZUPT を行う間隔を20秒と40秒で、それぞれ精度を確 認した。 位置誤差(m) 1往復目 2往復目 3往復目 A→B B→A A→B B→A A→B B→A ZUPT 間隔 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 20 秒 0.5 0.1 0.57 0.3 0.77 0.4 1.0 0.5 1.7 0.7 1.9 0.9 位置誤差(m) 1往復目 2往復目 3往復目 A→B B→A A→B B→A A→B B→A ZUPT 間隔 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 水 平 垂 直 40 秒 2.1 0.2 3.6 0.5 3.9 0.6 4.8 1.2 6.3 1.5 7.8 1.7 基準点 徒歩約20 秒(28m) 折り返し点
A
B
20 図4-2. 移動軌跡データ 図4-3. 垂直方向の誤差蓄積 1 2 3 6 4 5 1 2 3 6 4 5 20 40 60 80 100 120 140 160 移動時間(秒) 0 ※ 図中の数字は、ZUPT 回数 20 40 60 80 100 120 140 160 移動時間(秒) 0 ※ 図中の数字は、ZUPT 回数
21 2-5. まとめ 2-5-1. 成果と問題点 今年度の成果を以下にまとめる。 1) 重量は1/2以下(約 9Kg から約 4Kg)となり、十分な軽量化を達成できた。ま たサイズも体積で約1/4(20cm×35cm×12cm から 12cm×12cm×15cm)と なり、携帯性も大幅に向上した。 2) 出動中の消防自動車のカーナビなどから信号をもらうことができれば、初期化時 間も大幅に短縮できる。 3) 計測精度の実験によると、平成 14 年度に開発された大型のシステムより計測精 度が若干劣るものの、実運用可能な精度であることが確認できた。 4) 軽量化のための薄肉筐体により、ジャイロのディザー(左右回転振動)音が共鳴 している。隊員認知上は有効であるようなところもあるが、今後検討する必要が ある。 2-5-2. 実用化への取り組み 実用化のために、今後以下のような課題に取り組むことが必要と考えられる。 1) 携帯性や操作性の要求を十分満足する位置特定システムとするために、装置の装 着法やデザインを工夫する。たとえば、位置補正に必要なZUPT スイッチを酸素 ボンベの右肩に取り付け、アラームおよびZUPT 指令を表示するなどの機能デザ インを行う。同時に、ペンコンピュータによる外部からのオペレーションを廃止 し、データ記録を装置内部で行なう。 2) 隊員の動作を自動判定することで、自動 ZUPT 処理を行い、ZUPT の頻度を削減 する。 3) 移動中にアライメントを行なう方法は既に開発されているが、アライメントを含 む初期化のタイミングについて、運用条件等を考慮し実証的に検討する必要があ る。 4) 電子タグリーダ、無線 LAN との一体化(ソフトウエアも含めて)を実現する。 5) 上記のようなシステムの改良を、より実際の使用条件に近い環境下で実験を繰り 返しながら進めていく。 2-6. 付属書類 1) 慣性装置構造図 2) 慣性装置結線図 3) 演算基板結線図 4) 慣性センサ制御基板結線図
22
27
28
29
30
39
(
電子タグの仕様作成及び情報通信システムに関するワーキンググループ)
3. 情報通信システム
3-1. はじめに 本事業では、昨年度、ジャイロをベースとした隊員の位置特定システムの整備を行って きたが、実際、隊員同士の連絡方法、本部から隊員への命令伝達などでは、音声を含めた 統合的な通信システムの必要性が明確になった。 本年度は、この点を補うものとして、咽喉マイクを用いた無線通信システム(FiReCOS) の活用を中心に、地下空間でも信頼の置ける通信手段の開発を目標として進めた。 3-2. FiReCOS とは このシステムは、消防隊が火災現場において、活動中に使用するための「統合化した消 防 防 災 通 信 シ ス テ ム 」 で あ り 、 愛 称 を FiReCOS (商標:Fire fighting and Rescue Communication System の略。以下 FiReCOS と表記)と呼んでいる。FiReCOS は、阪神淡路大震災発生時に、携帯無線機を用いた連絡において、多くの部隊 が、限られた周波数の中で同時に共通波を使用したため混信し、通信システムとして現場 で機能しなくなったことを契機として、日本国内において数千万人の人々が携帯電話を至 る所で利用している現代において、大規模災害発生時等の場面でも、混信なく他の応援部 隊との連絡をとることを目的として開発され、1対1の通信からグループ通信、更には移 動系と固定系の相互通信や全国規模での通信も可能なコンピューターネットワーク技術を 用いた拡張性の高いシステムとなった。 現在、消防無線と防災行政無線の移動系と固定系は、 割り当てられている周波数が違うため、お互いに乗り 入れた通信はできない。ただ、現在、総務省、消防庁 他関係官庁において、防災行政無線、消防無線のディ ジタル化に向けた検討がされており、これらの問題も その中で課題として検討されている。 FiReCOS は、PHS 移動体通信をベースにイーサネ ットで接続された、セルステーション(CS)を基地 局に、通話端末を内線モードで使用することにより、 秘話性を保たせ、また、多者通話のためのサーバ機能 を持たせることにより、最大9端末があたかも電話会 議をしているがごとく通話することが可能となり、隊 員の相互連絡網としても機能する。 Cell Station Cell Station Ethernet LAN PIAFS サーバー 管制用パソコン 図2-1 FiReCos の概要図
40 3-3. 災害発生時のインフラ網の想定 開発目標を設定するに当たり、現状のインフラに関しての整理を行った。 3-3-1. ネットワークの分類 3-3-1-1. イーサネット イーサネットは、現在構築されているネットワーク(LAN)のベースとなるシステムで あり、安価で容易な接続により、ネットワークを構築することが可能である。現在、ケー ブルについては、メタルケーブル(カテゴリ5)を使用し、コネクタは、RJ-45 規格のも のが用いられている。伝送能力は、最大100Mbps のもの(100Base-TX)が普及している が、送受信するデータが、文字ベースのものから、音声、映像とマルチメディア化、増大 化するに従い、また、利用者(クライアント)の増加に伴い、光ケーブルを用いたシステ ムも増えている 現在、大都市圏の建物の大半は、このネットワーク網が敷設されていると考えられる。 3-3-1-2. 無線LAN 無線 LAN (WLAN) は、RF (無線周波数) 技術を用いたデータの送受信システムであり、 ケーブルを介すことなく、データを送受信できる特徴がある。現在、一般的に使用されて いる規格は、IEEE (Institute of Electrical and Electronics Engineers) が策定した IEEE 802.11 であり、802.11 規格に準拠した WLAN では、イーサネットの場合と同様に、ど のような LAN アプリケーション、ネットワーク・オペレーティング・システム、プロト コル (TCP/IP を含む) でも動作する。WLAN の場合、世界各国の主要な規制機関の承認 の下に、未使用の周波数帯を利用してデータを伝送するが、使える周波数帯は国によって 若干異なり、また、使用に際し、屋内のみ等という条件が加わる場合もある。 表.3-1 主な無線 LAN 規格 802.11b 802.11g 802.11a 伝 送 方 式 DSSS (スペクトラム 直接拡散方式) 2.4GHz 帯 OFDM (直交波周波数 分割多重方式) 2.4GHz 帯 OFDM (直交波周波数 分割多重方式) 5GHz 帯 デ ー タ 伝 送 速 度 11,5,,2,1(Mbps) 54,48,36,24,18,12,9,6 ( M b p s ) 54,48,36,24,18,12,9,6 ( M b p s ) チャネル数 3 つの非重複チャネル 3 つの非重複チャネル 8 つの非重複チャネル (一部の国では 4) 伝 送 距 離 (屋内)※1 11MBps:30m 1Mbps:91m 54MBps:30m 6Mbps:91m 54MBps:12m 6Mbps:91m 伝 送 距 離 (屋外)※1 ,2 11MBps:120m 1Mbps:460m 54MBps:120m 6Mbps:460m 54MBps:30m 6Mbps:305m 互 換 性 IEEE802.11b 準拠 Wi-Fi IEEE802.11b 準拠 Wi-Fi IEEE802.11b 準拠 Wi-Fi ※1伝送距離は、標準的な参考値 ※2屋外伝送距離は、見通しでの距離 無線 LAN によるネットワークは、どこでもネットワークを構築出来る利点がある反面、 守秘性、伝送距離等にやや難があると考えられている。
41
3-3-1-3. VDSL
DSL(Digital Subscriber Line) は、既存のメタル電話線、有線放送ケーブル等を用いて、 高速広帯域のデータ伝送を可能にする技術の総称であり、その技術は、マルチメディアア プリケーションを利用するために、1989 年ベルコア(ベル・コミュニケーションズ・リサ ーチ)において開発されたが、インターネットの普及と共に ADSL(Asymmetric Digital Subscriber Line)を始めとする、DSL 技術を活用が増えていった。
この中で、VDSL(Very high bit rate Digital Subscriber Line)は、伝送距離を短く限定す ることにより、ADSL に比較してより高速な伝送を可能にする技術として確立された。 伝送速度、20∼40Mbps に対し、数 m から1km程度の伝送距離が可能である。 この利点は、ビル内等にある電話線等の通信網を活用し、容易にネットワークを構築で きることにある。 3-3-2. 地下空間におけるネットワーク敷設の要件 例えば、地下空間においては、屋外とは遮断されており、携帯電話、PHS のような無線 通信は使用出来ない。また、わざわざ、メタルケーブルを通信手段確保のために敷設する ことは考えにくい。 仮に無線 LAN カードを各端末に組み込むと仮定し、その場合の伝送経路を考えた場合、 防火扉のような電波の遮蔽率が高いものがその伝送を軽くする可能性がある。また、現状 のFiReCOS を音声以外の情報も含めたデータ伝送として利用する場合も、通信網の確立に 関して確実性が乏しいと考えられる。 但し、現在中規模以上のビルについては、非常用の通信網の敷設が義務づけられており、 火災報知システムに付帯する形での通話網があり、この通話網は、ビル内の集中管理セン ター等をハブに一定のポイント毎に開設されており、通話機を接続することで、その通信 が可能である。 ビル内にて、1階階段室にCSを設置した場合の2階、3階での通話品質の参考値を以 下に示す。 表3-2 ビル内フロア間の通話品質 アンテナ表示 通話品質 電界強度 1F 階段室付近 5 5 70(dB.u.V) 2F 階段室付近 4 5 47(dB.u.V) 2F 階段室から 10m 2 2 27(dB.u.V) 2F 階段室から 20m 圏外 − 20(dB.u.V) 3F 階段室付近 圏外 − 20(dB.u.V) 測定場所:日本ビクター(株)久里浜技術センター社屋 フロア間:高低差約4m このように水平方向であれば、ある程度の遮蔽に対しても通話が可能であるが、フロア をまたいだ場合は、通話がとぎれてしまう。地下においては、この状況が顕著であるため、 臨時のネットワークを構築する必要が生じる。
42 3-3-3. アドホックネットワーク 通信網の確立が乏しい状況では、各端末が自律的にマルチホップのネットワークを構成 するアドホックネットワークの技術を用いることが有効であると考えられる。 アドホックはラテン語の“ad hoc”をそのまま現代に持ち込んできた言葉で、「一時的な、 この問題に限って、その場しのぎの、特別な」といったニュアンスをもっている。ここで いう、アドホックネットワークは、電話回線、携帯電話ネットワーク、インターネットワ ークなど既存の特定のネットワークインフラに依存することなく、“中継機能を搭載した移 動端末だけから構成された一時的なネットワーク”のことを指す。アドホックネットワー クは、台風や地震のような非常災害時における有効な情報通信インフラとして活用すべく、 各機関、企業等にて研究開発を行っている。 今回の事業での運用に考えると、各隊員の持つ移動型端末が中継機の役割をすることで、 災害発生場所から、現場本部までの一時的なネットワークを構築することがこのアドホッ クネットワークを活用することで可能になってくる。 現在、通信総合研究所、電気通信大学では、802.11 無線 LAN アドホックモードを用いた 無線リンク上でのマルチホップによる TCP/IP 通信を可能にするための動的ルーティング ソフトウェアの開発を行っている。ソフトウェアは、インターネットで広く利用されてい るOSPF(Open Shortest Path First)をベースとしたソフトウェアと、アドホックネットワ ークの標準化で検討されているAODV(Ad hoc On-Demand Distance Vector)ルーティング プロトコルをベースとしたソフトウェアの開発を行っている。 このうち、OSPF ベースのものは、無線 LAN のようなポイントツーポイント、ポイント ツーマルチポイントのインフラについては、ネットワーク構成の頻繁な変更には対応でき るが、制御時のオーバーヘッドが予想される。 この実験では、AODV ルーティングプロトコルをベースとしたソフトウェアを各無線 LAN ノードにインストールすることで、有線系ネットワークから、任意に設定した各ノー ドを経由するネットワークが構築できる。 3-4. 開発ターゲットの設定 前項により定めた今年度の開発テーマについて、それぞれの開発ターゲットを次のとお り確定していった。 3-4-1. 可搬型セルステーション(HCS) HCS については、現在の能力から鑑み、以下に示す要求点に対し開発ポイントを定めた。 表4-1 システム稼働のための要求点 (1) 酸素ボンベ等他の機器に付加出来る大きさ、形状であること (2) 防水対応であること (3) 質量が軽いこと (4) 消防隊員の活動単位時間(30分)以上の連続使用が可能なこと
43 表4-2 開発ポイント (1) 大きさ形状 (a) 現在のCSの1/3以下の容積であること (b) ベルト着用が可能なこと (c) プラスティック樹脂を使用していること (2) 運用上とポータブル実行の改良 (a) 無線LAN カード内蔵 (b) アンテナ収納 (3) 可搬性の追求 (a) 充電型電源使用 (b) 使用時間連続1時間以上であること 3-4-2. VDSL VDSL については、現在火災報知器に付属する電話機能で使用する通信線を用いての伝 送テストを試みた。 VDSL モデムについては、現在市販されている機種を用いた。 3-4-3. アドホックネットワーク(AODV) アドホックネットワークの構築に関しては、先にあげた、通信総合研究所と電気通信大 学が共同開発している、AODV ルーティングプロトコルをベースとした動的ルーティング ソフトウェアを用い、仮想移動端末にソフトウェアを組み込むことでネットワークを構築 した。
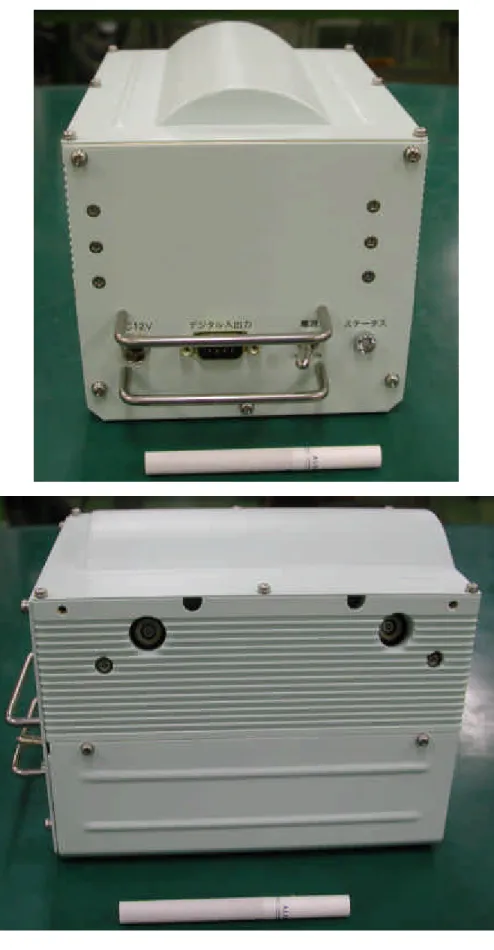
44 3-5. 可搬型セルステーション(HCS)の試作 以上のことから、まず、可搬型セルステーションを新たに構築した。 構築にあたっては、前項の内容を踏まえ、消防隊員が 持ち運びでき、また活動中に通話のとぎれることの ないような環境配分に心がけた。 ケース素材:アルミ アンテナ:外付け(無線LAN側、PHS 側双方) ケースサイズ:W120mm×H75mm×D175mm ケース自重:260g バッテリー自重:230g 総重量:1.0kg 通信機能:無線LAN(802.11b)、UDOP 使用バッテリー:MyBattery4400 (日本トラストテクノロジー社製) ベルトストラップ付き 参考までに、FiReCOS の持つ基本的な仕様を記載する。 表5-1 FiReCOS 基本仕様 (1) 使用周波数 1.9GHz 帯 (2) 平均出力 10mW(バースト値 80mW) (3) 端末本体重量 約100 グラム (4) 連続使用時間 6時間以上 (5) 通信周波数の自動割り機能(MCA) (6) ハンズフリー通話可能 (7) 双方向通話可能 (8) 騒音環境の下で使用可能 (9) 通話相手の識別と特定が可能 (10) 端末8台までのグループ通話が可能 (11) 画像などのディジタル情報の送信が可能 (12) 一般の消防携帯無線機との併用が可能 (13) 管制機による隊員情報管理 (14) 継機設置に対する拡張性 図5-1 可搬型セルステーション
45 3-6. 基礎実験 可搬型セルステーションを用いた通信実験を始めるに当たり、次の5点の実験を行った。 3-6-1. 消費電流測定 図6-1 測定システムイメージ 上のシステムを構築し、各事象に対するバッテリーからの出力電流値を測定した。 図中、PS は、PHS 端末を、PBX は、ここでは、回線コントローラ PC を意味する。 電源投入時:電源ON し、HCS がシステムから認識・登録され、通話接続可能となる 瞬間まで(赤LED 連続点灯) アイドル時:1ch も通話接続していない状態(緑 LED が全消灯している状態) 1ch 使用時(接続時も含む):アイドル状態から、PHS 無線回線を 1ch 使用して通話接続 を完了した瞬間まで(緑LED が 1 個点灯) 2ch 使用時(接続時も含む):1ch 使用状態から、更に PHS 無線回線を 1ch 使用して 通話接続を完了した瞬間まで(緑LED が 2 個点灯) 3ch 使用時(接続時も含む):2ch 使用状態から、更に PHS 無線回線を 1ch 使用して 通話接続を完了した瞬間まで(緑LED が 3 個点灯) ランダム使用時(30 分間):1ch 使用⇔2ch 使用⇔3ch 使用を繰り返す作業 バッテリ PBX1 CS 1 PS1 “1001” AP 1 HUB 無線LAN 通話 通話 通話 PHS 無線 PHS 無線 HCS1 テスター DC-DC CPU 基板 メディア コンバーター + PS2 “1002” PS3 “1003” PS4 “1004” PS5 “1005” PS6 “1006” 電流を計測する
46 3-6-2. バッテリー寿命試験 各稼働条件でのバッテリー寿命を測定した。 図6-2 測定システムイメージ アイドル時:1ch も通話接続していない状態(緑 LED が全消灯している状態) 1ch 使用時:PHS 無線回線を 1ch 使用している状態(緑 LED が 1 個点灯) 2ch 使用時:PHS 無線回線を 2ch 使用している状態(緑 LED が 2 個点灯) 3ch 使用時:PHS 無線回線を 3ch 使用している状態(緑 LED が 3 個点灯) PBX1 CS1 AP1 無線LAN 通話 通話 通話 PHS 無線 PHS 無線 HCS1 PS1 “1001” PS2 “1002” PS3 “1003” PS4 “1004” PS5 “1005” PS6 “1006” バッテリー寿命を計測する
47 3-6-3. 通話品質試験①(無線LAN回線と通話品質の関係) 無線LAN アクセスポイント(AP)⇔HCS 間(無線LAN)の距離を徐々に大きくした 場合の各種試験を実施した。 ・HCS 電源投入時のシステム登録時間(HCS が使用可能となるまでの時間) ・通話品質の主観測定 ・ファイル転送時データレート測定 図6-3 測定システムイメージ 検査項目は、次の通りである。 PBX接続性(5段階) ? HCS の電源を投入し、回線コントローラにおいて該当する HCS のステータスが「未 接続」から「アイドル」になることを確認する。その際に電源を投入して「未接続」 から「アイドル」に変わるまでの時間を計測する。 発呼接続性(5段階) ? PS間の通話接続が行えるか 通話品質(5段階) ? 通話中の音声の明瞭度 接続持続性(5段階) ? 接続中に通話が切断されてしまうことがあるか 試験条件として、HCS、AP とも外付けアンテナを使用し、AP に関しては、三脚に取付 設置した。 PBX2 CS2 AP 1 HUB 無線LAN 通話品質を評価する PHS 無線 PHS 無線 距離を変化させる 通 話 品 質 を 評 価 す 通話品質を評価する 通話環境を変える 10m 位 PS1 “1011” PS2 “1012” PS3 “1013” PS4 “1014” PS5 “1015” PS6 “1016” LAN アナライザ 伝送速度を計測する PC ( ファイル転送ソフト) CPU 基板 メディア コンバーター 960kByte のファイルを PBX2 に転送する
48 3-6-4. 通話品質試験②(PHS 回線と通話品質の関係) HCS⇔PS間(PHS)の距離を徐々に大きくした場合の各種試験を実施した。 ? PS上におけるアンテナ強度表示の確認 ? 通話品質の主観測定 ? PHS 無線回線の電界強度およびエラー率の測定 図6-4 測定システムイメージ 検査項目は、次の通りである。 アンテナの立ち(5段階) ? PSの電源を投入し、画面上のアンテナバーの立ち具合を確認する 発呼接続性(5段階) ? PS間の通話接続が行えるか 通話品質(5段階) ? 通話中の音声の明瞭度 接続持続性(5段階) ? 接続中に通話が切断されてしまうことがあるかの確認 距離を 変化させる 電界強度測定 通話環境を変える PBX2
CS2 HUB AP1 無線LAN 通話品質を評価する PHS 無線 HCS1 通話品質を評価する 通話品質を評価する 10m PS4 “1004” PS5 “1005” PS6 “1006” PS1 “1001” PS2 “1002” PS3 “1003” フィールド アナライザ PHS 無線
49 3-6-5. 移動通話試験 HCS のアクセスポイント乗り換え等 HCS の移動による通話の影響の調査 図6-5 測定システムイメージ 通話断 ? 通話中に HCS を AP1(3階)から AP2(2階)に移動させ、呼の切断があった か確認する 音途切れ ? AP 乗り換えの際、音途切れの時間を計測する。 3-6-6. 実験結果 これらの実験を行ったところ、次の結果が得られた。 1)バッテリー出力電流測定(実施日:2004/2/14)
No. 稼働状態 バッテリー Max.(mA)※3 Min.(mA) Avg.(mA)
A-1 電源投入時 My Battery 1496 5V 電源:5.16V 3.3V 電源:3.304 V − 5V 電源:5.00 V 3.3V 電源:3.30 V − A-2 アイドル時 My Battery − − 1057 A-3 1ch 使用時※1 My Battery 1100 − 1089 A-4 2ch 使用時※1 My Battery 1140 − 1129 A-5 3ch 使用時※1 My Battery 1180 − 1165 A-6 ランダム使用時※2 My Battery 1196 1052 1129 ※1接続時も含む ※2 合計30分使用 ※3 max 値は一瞬 PBX2 CS2 HUB AP1 無線LAN 通話品質を評価する PHS 無線 PHS 無線 HCS1 通話品質を評価する 通話品質を評価する 約10m PS1 “1001” PS2 “1002” PS3 “1003” PS4 “1004” PS5 “1005” PS6 “1006” AP2 移動
50 2)バッテリー消耗試験 (1)My Battery(実施日:2/15∼22) No. 稼動状態 試行回数 寿命(時間:分) B-1-1 アイドル時 1 04:38 B-1-2 アイドル時 2 04:33 B-1-3 アイドル時 3 中止 B-2-1 1ch 使用時 1 04:36 B-2-2 1ch 使用時 2 04:35 B-2-3 1ch 使用時 3 中止 B-3-1 2ch 使用時 1 04:26 B-3-2 2ch 使用時 2 04:27 B-3-3 2ch 使用時 3 中止 B-4-1 3ch 使用時 1 04:10 B-4-2 3ch 使用時 2 04:08 B-4-3 3ch 使用時 3 中止 ※HCS の電源電圧減少による DC コンバーターON-OFF の繰り返しはない 3)通話品質試験①(無線LAN回線と通話品質の関係) (1) HCS 電源投入試験、PS接続試験、音声音質主観試験(実施日 3/16) 距離(m) PBX 接続性 発呼接続性 通話品質 接続持続性 100 5 30 秒 5 5 5 120 4 1 分 20 秒 5 5 5 150 4 1 分 30 秒 5 5 5 165 4 1 分 10 秒 5 5 5 170 1 接続できず 稼動環境:屋外(PBX,AP は、事務所傍、AP は 1m の高さ、HCS は 1.7m の高さ) 天候:晴れ 【参考】5 段階評価の目安 5 4 3 2 1 PBX 接続性 直ぐアイドルになる 少し時間がかかる ごくたまに接続× たまに接続× 完全に接続× 発呼接続性 全く問題なし たまに失敗する 半々 たまに発呼できる 全く発呼できず 通話品質 全く問題なし たまにプツプツ 品質悪いが会話可 何とか意思疎通可 会話成り立たない 接続持続性 全く切れない たまにプープー 良くプープー 切れることがある すぐ切れる (2)データ伝送速度計測(実施日 3/16) 実施内容:LANアナライザソフト、ファイル転送速度計測ソフト 距離 (m) ログ開始時間 ログ時間 (分) 全Pkt 数 全Byte 数 ファイル 転送速度 100 15:16 2 6678 1.24M 2.3Mbps※1 120 15:12 2 - - 1.5M※1 150 14:24 2 6690 1.24M 771K※1 165 14:52 2 6712 1.24M 通信できず ※1 下記数値にパケットオーバーヘッドは含まれていない ※2 通話は1通話のみで確認 稼動環境:屋外(PBX,は、事務所傍、AP は 1.7m の高さに設置、PS はアンテナを伸ばし、人間が手に持つ)
51 4)通話品質試験②(PHS 回線と通話品質の関係)(実施日:3/16) 距離 (m) アンテナ表示の立ち 発呼接続性 通話品質 接続持続性 Level(MAX) Error 100 5 本 5 5 5 60.9(dB.uV) 0(%) 150 5 本 5 5 5 50.6 0 200 3-4 本 5 5 5 41.6 0 220 3-4 本 5 4 5 43.0 0 240 5 本 5 5 5 54.0 0 ※240m での測定は、子機を 5m の高台に設置したことで電波状況が良くなったと思われる ※試験場所の環境条件より、測定は、240m までとした。 【参考】5 段階評価の目安 5 4 3 2 1 PBX 接続性 直ぐアイドルになる 少し時間がかかる ごくたまに接続× たまに接続× 完全に接続× アンテナの立ち 良好に立つ 立ちが少し不安定 何とか立っている 再起動でたまに○ 再起動しても× 発呼接続性 全く問題なし たまに失敗する 半々 たまに発呼できる 全く発呼できず 通話品質 全く問題なし たまにプツプツ 品質悪いが会話可 何とか意思疎通可 会話成り立たない 接続持続性 全く切れない たまにプープー 良くプープー 切れることがある すぐ切れる 5)移動通話試験(実施日3/18) 番号 通話数 スタート地点 ゴール地点 通話断 音途切れ J-1 3 3F 2F なし 3 秒 使用アクセスポイント Buffalo 社 WHR-A54G54 3-7. 考察 3-7-1. 消費電力(実験 3-6-1 の結果より) 電源投入時に瞬間的に消費電力が大きいことが判明したが、これはHCS に内蔵した、 CPUボードの、ある初期化シーケンスで発生しているものであり、既知の仕様である。 また、使用するチャネルが多くなるにつれ、消費電力が大きくなることが判明したが、 その差は小さいものであった。 なお、採用したバッテリーはこのような瞬間的な電力消費に対応していることを 確認済みである。 3-7-2. バッテリー寿命(実験 3-6-2 の結果より) 各条件において3回試行する予定であったが、2回の測定でその差が5分以内で あったため、3回目の測定は中止した。 試験分類Aで示したように、使用するチャネルが多くなるにつれ、消費電力が大きく なることから、駆動時間もこれに連動して変化することを確認した。 また、採用したバッテリーは、DC-DC コンバーター、過充電、過放電、短絡保護回路 を内蔵しており、残電力がある程度低下した時点でこのDC-DC コンバーターが、自動的 に電力供給をストップする仕様となっているため、HCS の電源が ON⇔OFF を繰り返すような誤動作が発生しないことも確認した後に本実験を実施している。
52 3-7-3. 無線 LAN 回線における通話品質の関係(実験 3-6-3 の結果より) 本測定は以下の条件で行った。 ? 天候 晴天 ? 環境 一方が山、一方がビルで挟まれた舗装路面上 ? 各端末の状態 HCS:外付けアンテナ装着、1.7mの三脚上に設置 A P:外付けアンテナ装着、1.0mの三脚上に設置 ① 無線LAN回線と通話品質の関係 無線LAN距離に関わらず通話品質が安定しているが、これは無線LAN(IEEE 802. 11b)の伝送容量(最大 11Mbps)が、通話子機である PHS の音声データレートに対し、 伝送容量的に十分余裕があるためと考えられる。 PHS の音声データレートは1チャネル当たり上りと下りで 64kbps であり、今回の実 験で行われた3チャネル通話(1台の可搬型基地局の最大使用チャネル数)でも、192kbps 程度、パケットヘッダ等のオーバーヘッドを含めると1.25 倍の 240kbps 程度である。 [補足] 本システムでは、パケットヘッダ等のオーバーヘッドを含めると音声パケットのサイズ は音声データサイズの1.25 倍であり、オーバーヘッドを含めたデータレートは、 192×1.25=240kbps 程度となる。 ② HCS の回線コントローラへの登録 HCS 登録時間については、距離が大きくなると、その時間も長くなる傾向にあるが、 階段状の変化を記録している。測定サンプルが少なく傾向を把握できていないが、プロ トコル上の再送や待ち時間が関係しているものと思われる。 HCS 登録に 30 秒以上かかることはプロトコル上のエラーが発生している可能性があ る。 従って、通話性が良好(評価5)であっても、一度HCS がシステムから切り離される と再接続に時間がかかるため、通話接続性が不安定となる。 よって今回は30 秒以内に HCS 登録ができた距離を保証距離とした。 なお、HCS 登録時間は以下で表すことができる。 HCS 登録時間= (HCS 起動時間(約10秒)or 無線LANリンク確立時間 の何れか長い方) +PBX⇔HCS 間における認証・登録処理時間 本測定では、電源投入時から通話可能となるまでの時間を計測したのみであり、上記の 2要因 ・無線LANリンク確立時間 ・PBX⇔HCS 間における認証・登録処理時間 の切り分けができていないため、切り分けのための実験を通じ、時間を要している部分を 見つけ出し、改善しなければならない。
53 [補足] 本システムにおいてHCS はPBXと所定の認証シーケンスを経てシステムに認証・登 録される。PBXはネットワーク上の各基地局と巡回サイクルにより制御・監視を行うた め、今後は上記のようなPBXの制御仕様と照らし合わせ、HCS 登録時間を高速化する 調整が必要となる。 また、HCS 登録時間の要因が無線 LAN のリンク確立時間によるものである可能性も あるため、この点に関しても今後より詳細な測定が必要である。 ③ 無線 LAN 回線における距離との関係 本環境下における、無線LANリンク確立の限界距離であった150mでは、デ ータレ ートが、771kbpsと計測された。これはパケットヘッダ等のオーバーヘッドを含め ない真のデータ伝送速度であり、①の考察で記したPHS の音声データレートと比較して 伝送容量的には余裕があると考えられる。 しかしながら、HCS、AP 双方の設置位置によりこの性能は大きく左右されることが判 明しており、本実験で得られた性能はベストケースと考えるべきである。 なお、IEEE802.11b 規格では見通し100m以内の動作保証としていることを考慮す ると、本測定によって下記の性能が確保された。 ? 天候 晴天(10−20℃) ? 環境 屋外、舗装路面上付近で他の無線LAN が使用されていない状態 ? 各端末の状態 HCS:外付けアンテナ装着、地上1m以上に設置 AP:外付けアンテナ装着、地上1m以上に設置 ? HCS の AP に対する垂直面の角度差: 30°以下(0°に対し3dBの減衰) ? 保証距離 上記条件において見通し100m [補足] 今回使用した外部アンテナは水平方向に対しては無指向であるが、垂直方向に対して は利得が殆ど取れない。よってアンテナの設置の角度、各端末の使用時の高さに注意が 必要であり、角度、高低差によっては上記の保証距離が満たされない場合もあることを 付け加える。 更に、AP と HCS の間を人間や物体が通過した場合、一時的に電波が遮蔽される状 態となることが考えられる。現時点ではそのような状態における影響を測定していない ため、状況によっては上記の保証距離が満たされない場合もあることを付け加える。 3-7-4. PHS 回線における通話品質の関係(実験 3-6-4 の結果より) 本測定は以下の条件で行った。 ? 天候 晴天 ? 環境 一方が山、一方がビルで挟まれた舗装路面上
54 ? 各端末の状態 HCS:外付けアンテナ装着、1.7mの三脚上に設置 PS:アンテナを伸ばした状態、人間が手に持った状態 ①HCS と PS 間での通話品質 HCS⇔AP 間距離(無線LAN距離)より HCS⇔PS間距離(PHS 距離)の方が稼げ ることが判明したが、それぞれ使用する周波数、信号方式が異なるため、環境によっては このような性能差が生じてくる。この双方の無線インターフェースの利点・欠点を考慮し、 HCS の設計時、およびシステム構築時に考慮する必要がある。 ②HCS の保つ伝搬能力 測定環境の都合上、240m までしか計測できなかったが、本計測では 200m を超えてか ら、音声品質に低下が見られた。しかし、PS の位置を高くすることによって、音声品質・ 電波強度とも改善されることが判明した。 なお、PHS の規格である[ARIB RCR STD-28]では、見通し 100m 以内の動作保障 としていることを考慮すると、本測定によって下記の性能が確保された。 HCS の PHS インターフェース性能 ? 天候 晴天(10−20℃) ? 環境 屋外、舗装路面上付近で他の無線LAN が使用されていない状態 ? 各端末の状態 HCS:外付けアンテナ装着、地上1m以上に設置 HCS の AP に対する垂直面の角度差: 30°以下(同じ高さとなる 0°に対し 3dB の減衰) HCS と PS の高低差: HCS⇔PS 間距離が見通し 100m で 5m 以内 ? 保証距離 上記条件において見通し100m ③PHS 回線における距離、遮蔽等との関係 今回の測定結果から、50[dB.uV]の電波強度が確保されていれば、安定した通話接続が行 えることが判明し、100m であれば十分強度が確認された。しかしこの範囲内であっても、 ビルをまたぐような状態ではPS上で「圏外」と表示された。 [補足] 3-7-3.③の補足で記した事項と同じく、アンテナの指向性、通過物による電波遮蔽から 上記の保証距離が満たされない場合もあることを付け加える。 3-7-5. 移動通話試験(実験 3-6-5 の結果より) 本測定は1回しか行われていないため、測定結果はあくまで参考データである。 今後試行数を増やし、アクセスポイント設置位置、HCS の移動の仕方等を変化させ、 ? 通話が切れることがあるか ? 乗り換え中の無音時間 ? 乗り換え時のノイズ