1
目次
第 1 章 序論 3 1.1 背景 ... 3 1.2 目的 ... 5 第 2 章 スイッチング電源の制御器による知能化 7 2.1 DPWM を用いたスイッチング電源装置の概要... 7 2.1.1 DPWM を用いたスイッチング電源装置の概要 ... 7 2.1.2 ディジタルスイッチング電源のプログラム構成 ... 11 2.1.3 PWM 波生成アルゴリズム ... 13 2.1.4 出力信号の A/D 変換 ... 15 2.2 ディジタル制御によるスイッチング電源装置のシステム同定 ... 17 2.2.1 最小二乗法に基づくシステム同定実験 ... 17 2.2.2 システム同定実験(オフライン:無負荷) ... 19 2.2.3 システム同定実験(オフライン:負荷) ... 23 2.2.4 可変忘却要素を用いた逐次最小二乗法 ... 25 2.2.5 VFF-RLS によるシステム同定実験(オンライン) ... 29 2.3 ディジタル制御によるスイッチング電源のシミュレーションおよび制御実験 .... 32 2.3.1 積分+ノッチフィルタ(極零相殺型)の設計 ... 32 2.3.2 外乱オブザーバ付き内部モデル制御(DIMC)の設計 ... 34 2.3.3 シミュレーションおよび制御実験での応答比較 ... 38 2.3.4 負荷抵抗での制御対象の変動を模擬した制御器のシミュレーション結果 ... 45第 3 章 Scanning Electron Microscope の解析とビームドリフト低減手法 47
3.1 SEM の概要 ... 47 3.1.1 SEM の概要 ... 47 3.1.2 SEM の動作原理 ... 49 3.2 プログラムの解析 ... 50 3.2.1 粗調整プログラムの解析 ... 50 3.2.2 微調整プログラムの解析 ... 52 3.3 テンプレートマッチング ... 54 3.3.1 一般的なテンプレートマッチングの手法... 54 3.3.2 実験装置のテンプレートマッチングプログラム ... 57
2 3.4 粗微動調整プログラムの実行結果に対する解析 ... 58 3.5 ビームドリフトを考慮した微調整プログラムの提案 ... 62 第 4 章 まとめ 65 参考文献 66 発表論文 68 謝辞 69
3
第 1 章 序論
1.1 背景
スイッチング電源は、1960 年代初頭にロケット用技術として米国航空宇宙局(NASA)に 研究・実用化され、その後 40 年以上経過している。近年、汎用スイッチング電源が多岐に 渡り用いられているが、これに対する要求性能の複雑化・多様化は著しくなってきている。 その例として、電圧のマルチレベル・高品質化、省エネ化による待機電力の削減や変動効 率の向上、ディジタル負荷特有の電圧安定性、分散・並列冗長運転のための通信機能、EMI (Electro Magnetic Interference)環境対策などが挙げられる。このことから電源回路の制御処 理をディジタル化するニーズが高まってきている[12][13]。 従来、スイッチング電源にはアナログ制御が用いられてきた。その利点としてエンジニ アが制御器の設計を理解しやすいことや、アナログ制御をサポートする LSI が豊富に存在 すること、エンジニアによる独自性が大きいことなどが挙げられる。しかし、電子機器の 複雑化や搭載される電源の数が増加する一方で、低消費電力、高速応答など電源に対する 要求も高まってきた。これらの高性能化要求に応えるために、個々の負荷に対して設計条 件を変えて個別の制御器を設計する必要があること、仕様変更に伴い部品の交換が必要な こと、電源の複雑化に伴う部品数や回路の肥大化が問題となってきている。これらをアナ ログ方式、すなわちハードワイヤードで実現するのは、回路が複雑になりすぎて現実的で はない。 これに対し、ディジタル制御を電源に導入した場合、複数の負荷に対しても 1 つの制御 器で対応でき、仕様変更は設計者が実際に部品を交換し微調整、再設計するのでなく、ソ フトウェアによる変更が可能となる。また、ディジタル化することで高度な制御法を容易 に適用する事ができるため、抵抗や容量といった負荷条件の変化や、入力条件の変化など の外乱が出力に与える影響の補償、出力フィルタの小型化などができる。また、動作状態 のモニタリングをすることで、状態に応じた最適化が可能になる。加えて、負荷変動時の 出力電圧のピーク値を小さく制御できる上、常に一定で高速な起動時間を実現できる。さ らに、負荷推定や故障診断なども適用可能である。 このように電源のディジタル化が推進される背景には、電圧精度や費用対効果などにお いてアナログ方式では対応できなくなっている現状や、POL(point of load)コンバータの 負荷にあたる FPGA(field programmable gate array)やマイクロプロセッサの微細化や高性能 化など、プロセス技術の進化がディジタル制御化を後押ししている。一方で半導体の製造過程においてもディジタル技術による高機能化が期待されるように なってきている。半導体は 1940 年代に発明されてから現在に至るまでに、多岐の分野に応 用されることで大量生産されるようになった。そしてグローバル化が行き渡り、世界中で
4 大工場が無数に建設されてきた。その結果、行き過ぎた大工場の設立により半導体の過剰 生産という状況が発生した。日本の半導体産業はこの影響により産業規模を縮小し続けて いる。市場のニーズを見ても大量生産から多品種少量生産へと移り、近年ではその両者の 中間である変種変量生産へと変わってきている。産業規模が縮小した要因として、大量生 産、低コスト化のための工場の設備投資額の肥大化が大きなものとなっている。具体的に は、最先端工場の設備投資額は現在 5000 億円規模にまで膨れ上がっている。この巨額の投 資費用を回収するためには、莫大な出荷個数が見込める製品を大量生産する必要があるが、 それは今の市場のニーズに合わない。 そこで考えられたのが、無駄を排除し工場サイズを縮小化するという超小型生産システ ム、ミニマルファブ[21]である。ミニマルファブは、従来の設備として必須であったクリー ンルームが不要なため、設備投資額が 1000 分の 1 の約 5 億円に削減ができる[19]。また設備 装置そのものも小さくできるため、製造を様々な場所で行うことができる。つまり設備投 資額が小さく、広大な場所も必要としないため、必要に応じて随時工場を作ることができ る。これがミニマルファブが現在のニーズに応えた変種変量生産を得意とする理由である。 そしてミニマルファブに必須の装置群の中に走査型電子顕微鏡(Scanning Electron Microscope:SEM)がある。SEM は研究・開発・製造を問わず広く利用されており、半導 体製造においてはウェハーに回路パターンを書き込む際に精密な操作が要求されるため利 用されている。 変種変量生産のためには SEM の光源の材料を変更したり、ステージを別の種類に変える 必要がある。これにより SEM のステージ系と画像系の相関が崩れてしまう。その際に、毎 回機械的なメンテナンスを行って調整し直すと、時間とコストがかかるという問題が出て くる。そこでアナログで機械的な従来法ではなく、ディジタル技術を用いることで調整を 短時間かつ低コストで解決することが求められている。
5
1.2 目的
汎用スイッチング電源のディジタル制御化によって、従来のアナログ制御で実現出来な かった高度な制御法を適用することが可能になる。これまでのアナログ制御では PI 制御や 位相補償といった古典制御を主に行っているが、ディジタル制御を導入することによりロ バスト制御や電圧と電流の同時制御、システム同定法による適応・学習、故障診断などと いった知能化や、高度な制御が導入できる。ただし、制御器にかかるコスト例を挙げると、 アナログ制御器で 40 円かかるものに対して、ディジタル制御器では 70 円かかってしまう。 そこで差額分を状態推定・故障診断や知能化といった面にコストをかけることにより、デ ィジタル制御のメリットを見出すことを考える。本研究では、電源に Digital Signal Processor(DSP)、Field Programmable Gate Array(FPGA) などの集積回路を用いることで、プログラミングによるディジタル制御を行う[4][5][6]。また、 これらの集積回路は C 言語やハードウェア記述言語(HDL)などを用いることでプログラ ミングを行う。 ディジタル制御電源の開発にあたり、これまでに MATLAB を用いたシミュレーションを 行い、応答性の良い制御系の構築を行ってきた[9][10][11]。本研究ではその実用性を示すために、 FPGA を用いた電源ボードを製作し、システム同定実験[7][8][14]を通してディジタル制御系を 構築する。また、制御帯域の広帯域化による評価をオーバーシュートと整定時間から行う。 本開発では、汎用スイッチング電源をアナログ制御方式または LSI 制御方式からディジ タル制御方式に単に置換するだけでなく、現状主体であるパワエレ技術と先端ディジタル 制御技術を総合化することによりスイッチング電源をインテリジェント化することを目的 とする。これにより、上述した要求性能を満たすための高速・高分解能 PWM 制御、先進デ ィジタル制御、高速処理プログラミング、自由な付加修正機能、故障診断機能などを達成 するディジタル独自の機能を付加した低コストな知能化された汎用電源の開発・実用化を 目指す。 SEM においてもディジタル技術を用いることで高機能化が可能となる。現在半導体の変 種変量生産が求められており、それを実現するためにミニマルファブ構想が考えられた。 ミニマルファブを現実のものとするための1 つに SEM の知能化・高機能化がある。そして SEM を知能化するためにディジタル技術が必要とされている。 これまでにも SEM の各種知能化は研究されてきており、ステージ系と画像系を知能的に 1 対 1 に調整するソフトウェアは存在する。しかしながら成功確率が低く、また成功した場 合にも時間が掛かり過ぎるという問題がある。そこで本研究ではそのプログラムを解析し、 問題点を発見し改良することでよりスピーディーで成功確率の高いものを作成することを 目指す。そしてステージ系と画像系のマッチングを素早く高確率で満たすことで、SEM に とどまらずステージ制御などにおいても利用可能な汎用性を持った技術の開発を目標とす る。
6
本論文では、第 2 章ではスイッチング電源の制御器による知能化について述べ、第 3 章 では SEM の解析とビームドリフト低減手法について述べる。そして第 4 章で本研究のまと めを述べることにする。
7
第 2 章 スイッチング電源の制御器による知能
化
2.1 DPWM を用いたスイッチング電源装置の概要
2.1.1 DPWM を用いたスイッチング電源装置の概要
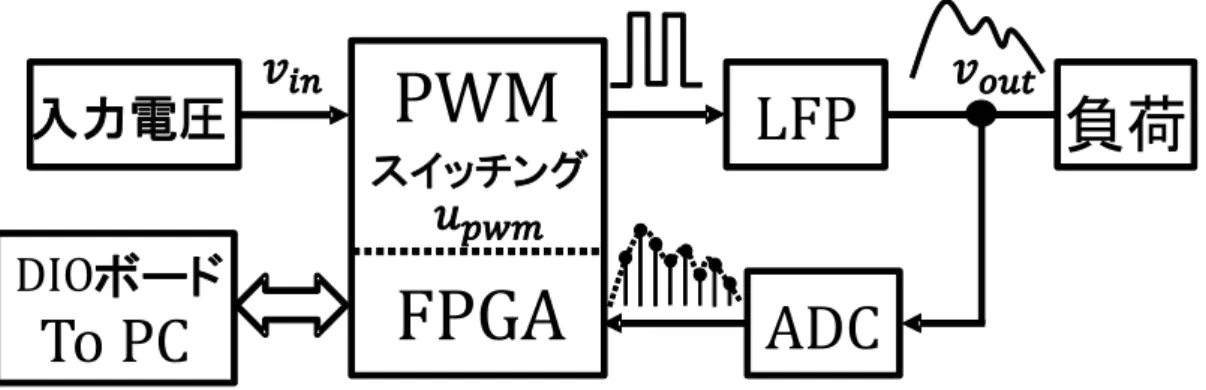
本節では、実験装置として使用した FPGA を用いたディジタル制御に基づく汎用スイッ チング電源の概要、ならびにその動作原理について述べる。 本研究に用いた実験装置のシステムの構成図を図 2.1 に示す。また、実験装置の仕様を表 2.1 に示す。ここでは、ハードウェアによる高速演算能力に着目し DSP ではなく FPGA を導 入している。実験装置は 8 チャンネルの出力端子を持つ電源ボードで、FPGA は電源ボード 上に接続されている。また、FPGA は JTAG コネクタを介して PC と接続されている。FPGA はハードウェア記述言語(HDL)を用いて論理回路を設計できる LSI であり、PC 上で Xilinx 社のソフトウェア ISE 9.1i を使用することで、電源ボードのディジタル制御系を設計できる。 入力電圧 vinに対し、FPGA により入力されるパルス幅変調(Pulse Width Modulation 以下PWM)波の Duty 比を制御し、各チャンネルに所望の電圧 voutを出力する。電源ボードの各 出力端子にはインバータとローパスフィルタ(LPF)が付いている。LPF を通ることで矩形 波が平滑化され、直流電圧になって出力される。各チャンネルの出力信号は A/D 変換器を 経て FPGA にフィードバックされる。A/D 変換器はハードウェアの構成上 25 MHz で変換を 行っている。変換されたディジタルデータはシリアルデータであるため、それをパラレル データに変換する必要がある。そこで、FPGA により連続的なシリアルデータの 14 clock 分 を 1 データとしてシリアルからパラレルに変換される。各信号はデータ取得ボードである DIO ボードを介して PC にデータ保存可能となっている。
DIO ボードはコンテック社の PIO-32DM(PCI)を使用した。この DIO ボードはスタート、 ストップ、クロックなどの条件を VisualC/C++などの各種プログラミング言語を用いて設定 できる。本研究では、FPGA からのラッチ信号によってデータの取得を開始し、1 クロック 毎にデータを取得し、1000 クロック分のデータを取得するとデータの取得を停止する。
8
図 2.1 スイッチング電源のシステム構成図
表 2.1 実験装置の仕様 実験装置概要
入力電源電圧 12 V
FPGA Xilinx Virtex4 クロック周波数 300 MHz 出力チャンネル 8 ch A/D 変換速度 25 MHz A/D 分解能 12 bit PWM Duty(D/A)分解能 0.10 %(10bit) 種類 降圧型 DC-DC コンバータ
入力電圧
LFP
負荷
ADC
DIOボード
To PC
PWM
スイッチング
FPGA
9
実験装置の写真を図 2.2 および図 2.3 に示す。図 2.2 は XilinX 社の FPGA である Vertex-4 を搭載した Human Data 社の FPGA ブレッドボード XCM-009-LX15 である。図 2.3 は(株) ルネサステクノロジが開発した電源評価ボード DDC8CH_TSB である。また、実験装置の 全体図を図 2.4 に示す。中央に見えるのが FPGA であり、その周辺にスイッチング素子や A/D コンバータ、D/A コンバータが搭載された電源評価ボードがある。 図 2.2 XCM-009-LX15 図 2.3 DDC8CH_TSB
FPGA
JTAGコネクタ
DONE LED
コンフィグレーションROM
SERIAL ROM
POWER LED
FPGA
JTAGコネクタ
DONE LED
コンフィグレーションROM
SERIAL ROM
POWER LED
電源供給(12V) CH1,CH2 0.7~1.3V 4.4A CH3 1.8V 6A CH4 2.5V 6A CH6 3.3V 6A CH5 5V 6A CH8 1.2V 20A CH7 1.5V 8A 電源供給(9V) 電源供給(12V) CH1,CH2 0.7~1.3V 4.4A CH3 1.8V 6A CH4 2.5V 6A CH6 3.3V 6A CH5 5V 6A CH8 1.2V 20A CH7 1.5V 8A 電源供給(9V)10 図 2.4 実験装置全体図
DAC
ADC
FPGA
Config.
ROM
ADC
DAC
Power
Source
To PC
11
2.1.2 ディジタルスイッチング電源のプログラム構成
本研究で用いるディジタル信号処理部は FPGA(Field Programmable Gate Array)によって 回路構成されている。FPGA とは、自分で論理回路を設計できるゲートアレイの一種である。 内部動作をソフトウェアで記述できるため、フレキシブルなデバイスであり、短時間で所 望の動作をさせることが可能となる。FPGA を設計するプログラムには HDL(Hardware Description Language)が用いられている。 HDL を用いたプログラム記述は、入出力信号宣言、内部信号宣言、動作記述の 3 つに大 別できる。入出力信号宣言、内部信号宣言はプログラムで使用する信号名の宣言で、信号 のタイプやビット数を宣言する。動作記述はプログラム内での信号の動作を記述し、FPGA の機能を設計する部分である。動作記述には if 文、case 文、for 文などの関数や手続き文な どを使用する。HDL は Verilog、VHDL、AHDL などがあるが、今回は Verilog を用いてプロ グラムを記述した。 図 2.5 は本研究で用いている、FPGA で動作させているプログラムをブロックごとに分け たものである。この機能ごとに分けられたブロックをモジュールと言い、最上層ブロック をトップモジュールと呼ぶ。 各ブロックの動作を説明する。 “dcm300mhz” ブロックは、48 MHz のシステムクロック を 300 MHz に変換する。これにより基本クロックは 300 MHz になる。“counter” ブロック では、300 MHz の基本クロックのカウントアップ信号から PWM 生成に使う信号や、制御 に用いる 2 MHz、250 kHz の信号が作成される。PWM 生成に使う信号は“pulse_gen” ブロッ クで使用される。“pulse_gen” ブロックでは、PWM 波が作られ、その詳細については次節 で述べる。“adc_buff” ブロックでは、入出力データは A/D 変換後にシリアルデータとして ボード内に入ってくる。そのデータをパラレルに変換するブロックである。変換されたデ ータである PWM _DATA は DIO ボードに送られ、PC にテキストデータとして保存される。
12 図 2.5 プログラムのブロック図
source
program
clock
dcm300mhz
counter
adc_buff
top
Controller
pulse_gen
Plant
AD7274
DIO board
PC
latch
clock
[digit] [digit] pwmdutyFPGA駆動スイッチング電源
13
2.1.3 PWM 波生成のアルゴリズム
PWM 波の生成には、クロック信号、PWMCNT、PWMDUTY の 3 つの信号を用いる。こ こで、クロック信号は 300 MHz の基本信号、PWMCNT、PWMDUTY は任意に設定した信 号である。 最初にクロック信号によってカウントアップするカウンタを作成する。1 クロックごとに カウント数が 1 増加し、最大値まで増加するとカウント数がリセットされる。このカウン タが PWMCNT 信号であり、カウント数を任意に設定することで信号の周期を決定する事が できる。また、クロック信号の周波数は 300 MHz なので、カウント数を 300×106 にする事 で 1 秒周期の信号を作成する事もできる。これを図 2.6 に示す。 次に、PWM 波の Duty 比を決定するための信号を与える。これが PWMDUTY 信号である。 Duty 比とは、図 2.7 のように 1 周期の中で信号が High の時間を%で示したものである。Duty 比はカウンタの最大値を 100 %とし、最小値を 0 %とする。よって PWMDUTY は PWMCNT と同じビット数を持つ信号になる。また、この 2 つの信号の最大値が Duty 比の分解能にな る。PWMDUTY はこの範囲において任意に値を設定できる。本研究では、カウンタの最小 値を 1、最大値を 1024 とした。このとき、PWMCNT、PWMDUTY は 12 ビットの信号にな り、PWM 波の周波数は1024/(300 × 106) = 3.41 μsで 293 kHz になる。 この 2 つの信号、PWMCNT と PWMDUTY によって PWM 波を作成する。以下にその方 法を説明する。図 2.7 に示すように PWMCNT と PWMDUTY が一致した時に PWM 波は High になり、PWMCNT が最小値に戻った時に Low になる。このとき、PWMCNT によるカウン タの周期が PWM 波の周期になり、PWMDUTY で設定した Duty 比だけ、PWM 波は High になる。 PWM 波において、Duty 比の分解能を大きくしようとするとカウンタの最大値が大きくな り、周期も長くなる。よって PWM 波も周期が長くなり、周波数が低くなる。逆に、PWM 波の周波数を高くすると、分解能が細かく取れなくなってしまう。このことから、PWM 波 の周波数と分解能はトレードオフの関係にあるといえる。また、FPGA における基本クロッ クの周波数も上限があるので、周波数と分解能を無限に大きくすることはできない。14 図 2.6 PWMCNT 信号によるカウンタ 図 2.7 PWM 波の作成
1周期
カ
ウ
ン
ト
数
PWMDUTY
PWM波
PWMCNT
15
2.1.4 出力信号の A/D 変換
出力信号は AD7274 により A/D 変換された後、FPGA によりシリアルからパラレルに変換 される。 変換ブロックは ADC_BUFF のモジュールでプログラム上で行われる。図 2.8 にその変換 回路、図 2.9 に変換ブロック、図 2.10 に AD7274 のタイミングチャートを示す。前項で述べ たとおり、本研究では 293 kHz の PWM 波を作成している。そこで出力クロックも同様に 293 kHz としている。またこのモジュールでは、基本クロックの 300 MHz から A/D 変換に 用いる 25 MHz のクロックを生成している。A/D 変換はこの 25 MHz(信号名:SCLK)に同 期して行われる。 FPGA から変換開始信号であるラッチ信号をプログラムの実行と同時に出力している。ラ ッチ信号が High→Low の立ち下がりで変換を開始し、チップセレクター(信号名:CS)が Low の状態でデータの取り込みを許可し、CS が High になるとデータは入らないようにし ている。この CS の動作で連続なデータを区切り、パラレルに変換している。CS は AD7274 の仕様により SCLK が 14 クロックの間 Low となっている。 図 2.8 データ変換構成図
16 図 2.9 変換ブロック 図 2.10 AD7274 のタイミングチャート clock 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 0 0 11 10 9 8 7 6 5 4 3 2 1 0 counter cs sdata r_adclk_num ・・・ 97 98 99 100 1 2 3 4 5 6 7 0 0 11 10 9 8 7
17
2.2 ディジタル制御によるスイッチング電源の
システム同定実験
最近では制御対象のモデル化にあたり、制御対象の入出力信号のみを必要とする比較的 簡便でかつ有効なモデル化手法であるシステム同定法が注目されてきた。システム同定法 は実験的な手法でモデルを得る方法であり、状態推定や故障診断、適応制御に応用できる ため、本研究ではシステム同定法を用いることとする。 本節では制御対象、すなわち制御入力となる PWM Duty 比から出力電圧である A/D 変換 値までの動特性のモデル化を行う。2.2.1 最小二乗法に基づくシステム同定実験
同定モデルとしては、次式で示される ARX(Auto-Regressive-eXogeneous)モデルを用い る。ARX モデルのブロック図を図 2.11 に示す。 𝐴(𝑞)𝑦(𝑘) = 𝐵(𝑞)𝑢(𝑘) + 𝜔(𝑘) …(2.1) ただし、 𝐴(𝑞) = 1 + 𝑎1𝑞−1+ ⋯ + 𝑎𝑛𝑞−𝑛 …(2.2) 𝐵(𝑞) = 1 + 𝑏1𝑞−1+ ⋯ + 𝑏𝑛𝑞−𝑛 …(2.3) 𝜔(𝑘)は白色雑音である。 ここでは、予測誤差法によって未知のパラメータ𝐴(𝑞), 𝐵(𝑞)の推定を行う。パラメータベ クトル𝜃、データベクトル𝜑は次式で表される。 𝜃 = [𝑎1, ⋯ , 𝑎𝑛𝑎, 𝑏1, ⋯ , 𝑏𝑛𝑏]𝑇 …(2.4) 𝜑(𝑘) = [−𝑦(𝑘 − 1), ⋯ , −𝑦(𝑘 − 𝑛𝑎), 𝑢(𝑘 − 1), ⋯ , 𝑢(𝑘 − 𝑛𝑏)]𝑇 …(2.5) ARX モデルの 1 段予測値は次式のようになる。 𝑦̂(𝑘|𝜃) = [1 − 𝐴(𝑞)]𝑦(𝑘) + 𝐵(𝑞)𝑢(𝑘) = 𝜃𝑇𝜑(𝑘) …(2.6) パラメータ推定の評価規範として、 と設定する。ここで、𝑙(𝑘, 𝜃, 𝜀(𝑘, 𝜃))は予測誤差 𝜀(𝑘, 𝜃) = 𝑦(𝑘) − 𝑦̂(𝑘|𝜃) …(2.8) の大きさを測る任意の正のスカラ値関数である。この評価規範 𝐽𝑁(𝜃)を最小にするように推 定値を計算するパラメータ推定法を総称して予測誤差という。 𝑙(𝑘, 𝜃, 𝜀(𝑘, 𝜃))を、2 次関数 𝑙(𝑘, 𝜃, 𝜀(𝑘, 𝜃)) = 𝜀2(𝑘, 𝜃) …(2.9) と選んだ場合を最小 2 乗法(least-squares method)という。つまり、 𝐽𝑁(𝜃) = 1 𝑁∑ 𝑙(𝑘, 𝜃, 𝜀(𝑘, 𝜃)) 𝑁 𝑘=1 …(2.7)18 𝐽𝑁(𝜃) = 1 𝑁∑ 𝜀2(𝑘, 𝜃) 𝑁 𝑘=1 ⋯ (2.10) として、この評価規範𝐽𝑁(𝜃)を最小にするようなパラメータを推定する。
ディジタル制御電源への適用の場合、u は入力である PWM Duty 比[digit]、y は出力電圧 [digit]である。 通常、PWM Duty比の単位は[%]であり、出力電圧の単位は[V]である。ここで、単位変換 について簡単に述べる。まず、PWM Duty比は入力分割数が210 であるため、これをPWM Duty 比100[%]とし、その最小分割数1を1[digit]とする。また、出力電圧について述べる。出力分 割数が212 であるから出力電圧y[V]とy[digit]の関係は、 𝑦[V] = 2.5[𝑉] 212[𝑑𝑖𝑔𝑖𝑡]∙ 10[𝑘 ] 3.9[𝑘 ]× 𝑦[𝑑𝑖𝑔𝑖𝑡] = 6.41[𝑉] 212[𝑑𝑖𝑔𝑖𝑡]× 𝑦[𝑑𝑖𝑔𝑖𝑡] ⋯ (2.11) となる。ここで、2.5[V]は OP アンプによって既知であり、3.9[𝑘 ]10[𝑘 ]は各出力 ch によって異な る。 図 2.11 ARX モデル + +
q
B
q
A
1
k
k
u
y
k
19
2.2.2 システム同定実験(オフライン:無負荷)
システム同定入力には入力振幅 51 digit と 256 digit の 2 値信号で、次数 20 の M 系列信号 を用いた。サンプリング時間を 3.41 μs とし、データ数を 9,800 とした。この時の入出力信 号の一部を図 2.12 に示す。入力信号に対して、出力信号が良く励起されていることが確認 できる。また、得られた入出力信号に対するコヒーレンスを図 2.13 に示す。図 2.13 より、 30 kHz(188 krad/s)程度まで入出力間の相関が高いことがわかる。これより同帯域までの 同定結果において信頼できることがわかる。 次に、この入出力信号を用いて 29 次の ARX モデルに対して最小二乗規範の予測誤差法 によりパラメータ推定を行った。なお、次数の決定にはクロスバリデーション法を用いて いるため、同定に用いたデータと検証用のデータは別である。図 2.14 に同定モデルの周波 数特性を示す。約 60 krad/s に共振特性を有する 2 次系の特性が得られていることが確認で きる。 得られた同定モデルの妥当性を検証するために同一入力によるモデル出力と実験出力の 比較を行った。結果を図 2.15 に示す。実線が実験出力、点線がモデル出力である。図より、 各出力は非常によく一致しており精度良く同定できていることがわかる。 図 2.12 入出力信号の一部5
5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9 6
x 10-3 0 50 100 150 200 250 300input signal
In
pu
t
du
ty
[d
ig
it
]
5
5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8 5.9 6
0 500 1000 1500 2000 2500output signal
O
u
tp
u
t
vo
lt
ag
e
[d
ig
it
]
Time [s]
x 10-320 図 2.13 入出力のコヒーレンス相関 図 2.14 同定モデルの周波数特性 103 104 105 106 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Frequency [Hz] Co her enc e
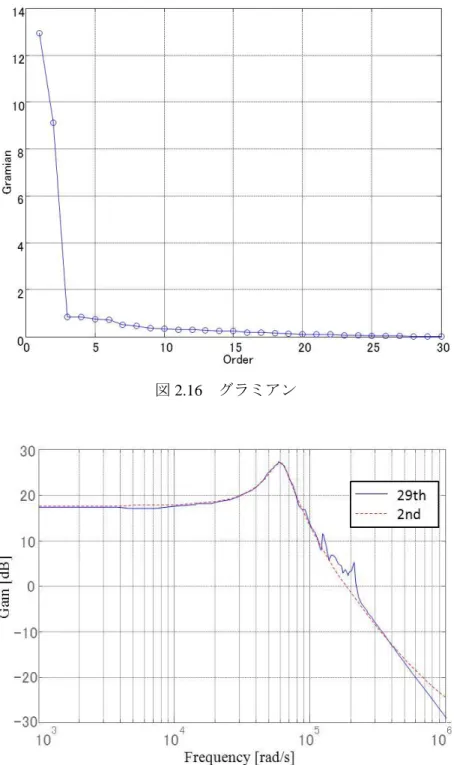
21 図 2.15 同一入力によるモデル出力と実験出力の比較 導出した同定モデルの次数は29次となっており、制御系設計の観点から低次元のモデル で制御対象の動特性を記述できることが望ましい。そこで29次のモデルを低次元化するこ とを考える。本研究では平衡化実現手法に基づきモデル次数の低次元化を行う。図2.16にグ ラミアンを示す。グラミアンとは、数値が高いほど出力への影響が強い。したがって図2.16 より、3次以降はグラミアンが0に近いため、モデルの次数を2次まで低次元化することがで きる。29次のモデルと2次まで低次元化したモデルの周波数特性を図2.17に示す。実線が29 次、点線が2次のモデルの周波数特性である。図2.17より低次元化した2次の近似モデルでも 十分に特性を記述できていることがわかる。29次である制御対象の周波数特性は、実験に より取得した離散時間の入出力データから導出したものであり、離散時間データにおける ナイキスト周波数に起因して高周波域はプロットされていないことに注意する。また、ゲ インもノイズやアンプの非線形性等に起因して近似モデルと若干異なっており、モデル化 誤差をもつことがわかる。 低周波域の周波数特性がフラットであるため、固有周波数より十分に低い帯域であれば、 積分制御などにより制御系の設計が可能となる。 導出したモデルの伝達関数Pn(s)は 𝑃𝑛(𝑠) =𝑘(𝑠 2+ 2𝜉 𝑛𝜔𝑛𝑠 + 𝜔𝑛2) 𝑠2+ 2𝜉 𝑑𝜔𝑑+ 𝜔𝑑2 … (2.12) となる。ここで、k = 9.61 × 10−4、𝜉 𝑛= 0.843、𝜔𝑛 = 382156、𝜔𝑑 = 62137となる。
22
図 2.16 グラミアン
23
2.2.3 システム同定実験(オフライン同定:負荷)
負荷変動を模擬して、出力端に抵抗負荷 0.98Ω、1.4Ω、5.6Ωを接続し、同様の同定実験 を行った。同定モデルの周波数特性を図 2.18 に無負荷の状態と重ねて示す。図より、抵抗 負荷を接続することで減衰率が変化していることが確認できる。また、表 2.2 に各抵抗負荷 における減衰率と固有周波数を示す。表と図から、負荷抵抗が小さくなるとモデルの減衰 率が大きくなっていることがわかる。なお、図 2.18 の実線で表示されている no load とは 0 Ωではなく開放状態(抵抗は無限大)となっている。 一例として、0.98Ωを負荷したときのモデルの伝達関数は 𝑃𝑛(𝑠) = 1.7672 × 108 𝑠2+ 2 ∙ 0.188 ∙ 6.15 × 104𝑠 + (6.15 × 104)2 … (2.13) となる。 負荷変動によってモデルの特性が変化するため、常に同じ制御器では制御性能を保持で きない。また、一般に抵抗負荷は温度特性を持ち、その値は時々刻々と変化するため、1 つ の抵抗負荷に合わせた制御器を設計しても応答が劣化してしまう。このため、制御性能を 追求するには制御器設計に必要な制御対象のパラメータを逐次同定する必要がある。次節 に逐次同定法を記す。24 図 2.18 抵抗負荷によるモデルの周波数特性 表 2.2 各抵抗負荷時の減衰率と固有周波数 無負荷 5.6Ω 1.4Ω 0.98Ω 減衰率[%] 0.164 0.167 0.180 0.188 固有周波数[rad/s] 62137 60832 61543 61500
25
2.2.4 可変忘却要素を用いた逐次最小二乗法
本項では、負荷変動や故障診断への制御器の適応性を考慮して、オンライン同定を行う ために、その準備として可変忘却要素を用いた逐次最小二乗法について述べる。可変忘却 を用いる理由として、時変システムのパラメータ推定を行う場合、過去のデータを指数的 に忘却する手法が有効だからである。これは、制御対象の変動や外乱などの誤差に応じて 観測値に時間的重みをかけることで、その同定誤差を補償できるためである。まず逐次最小二乗(Recursive Least Squares:RLS)法について述べる。システム同定に用 いる入出力データを
{𝑢(𝑘), 𝑦(𝑘): 𝑘 = 1,2, ⋯ } ⋯ (2.14) とし、この入出力データを ARX(Auto-Regressive with Exogenous input)モデル
𝑦(𝑘) = 𝜃𝑇∅(𝑘) + 𝜔(𝑘) ⋯ (2.15) にフィッティングする。ただし、 𝜃 = [𝑎1, ⋯ , 𝑎𝑛, 𝑏1, ⋯ , 𝑏𝑛]𝑇 ⋯ (2.16) は同定すべき未知パラメータベクトルで、 ∅(𝑘) = [−𝑦(𝑘 − 1), ⋯ , −𝑦(𝑘 − 𝑛), 𝑢(𝑘 − 1), ⋯ , 𝑢(𝑘 − 𝑛)]𝑇 ⋯ (2.17) は回帰ベクトルである。また、(k)は白色雑音であり、n はモデル次数である。今、システ ム同定の規範として、 𝐽𝑘(𝜃) = ∑ 𝜆𝑘−1(𝑖)𝜀2(𝑖) 𝑘 𝑖=1 ⋯ (2.18) を用いる。ただし、(k) は時刻 i における予測誤差である。このような評価規範を定義す ることによって、未知パラメータの推定値(𝜃̂(𝑁))は決定される。ここで RLS 法は、 𝜃̂(𝑁) = (∑ 𝜙(𝑘)𝜙𝑇(𝑘) 𝑁 𝑘=1 ) −1 (∑ 𝜙(𝑘)𝑦(𝑘) 𝑁 𝑘=1 ) ⋯ (2.19) に対し、行列 P(N)を 𝑃(𝑁) = (∑ 𝜙(𝑘)𝜙𝑇(𝑘) 𝑁 𝑘=1 ) −1 ⋯ (2.20) と置き、これを共分散行列と呼ぶ。すると、 𝑃−1(𝑁) = 𝑃−1(𝑁 − 1) + 𝜙(𝑁)𝜙𝑇(𝑁) ⋯ (2.21) が得られる。同様にして、 ∑ 𝜙(𝑘)𝑦(𝑘) 𝑁 k=1 = ∑ 𝜙(𝑘)𝑦(𝑘) 𝑁−1 k=1 + 𝜙(𝑁)𝑦(𝑁) ⋯ (2.22) となる。(2.20)式から(2.22)式を(2.19)式に代入して変形を行うと、次のようになる。
26 𝜃̂(𝑁) = 𝑃(𝑁) (∑ 𝜙(𝑘)𝑦(𝑘) 𝑁−1 k=1 + 𝜙(𝑁)𝑦(𝑁)) = 𝜃̂(𝑁 − 1) + 𝑃(𝑁)𝜙(𝑁){𝑦(𝑁) − 𝜙𝑇(𝑁)𝜃̂(𝑁 − 1)} ⋯ (2.23) (2.21)式と(2.23)式が RLS 法であるが、(2.23)式中の P(N)をオンラインで計算するこ とは困難である。そこで逆行列補題を用いて、(2.23)式をオンライン計算が可能な形式に 変形する。ここで、逆行列補題とは、ある正則行列 A に対して次式が成立することをいう。 (𝐴 + 𝐵𝐶)−1= 𝐴−1− 𝐴−1𝐵(𝐼 + 𝐶𝐴−1𝐵)−1𝐶𝐴−1 ⋯ (2.24) ここで、B、C は適切な次元の行列(あるいはベクトル)である。そこで(2.21)式の P(N) に逆行列補題を適用すると、次式が得られる。 𝑃(𝑁) = 𝑃(𝑁 − 1) −𝑃(𝑁 − 1)𝜙(𝑁)𝜙 𝑇(𝑁)𝑃(𝑁 − 1) 1 + 𝜙𝑇(𝑁)𝑃(𝑁 − 1)𝜙(𝑁) ⋯ (2.25) さらに、(2.23)式の右辺第 2 項に含まれる𝑃(𝑁 − 1)𝜙(𝑁)は、(2.25)式を用いることで次の ように変形できる。 𝑃(𝑁)𝜙(𝑁) = 𝑃(𝑁 − 1)𝜙(𝑁) 1 + 𝜙𝑇(𝑁)𝑃(𝑁 − 1)𝜙(𝑁)𝜀(𝑁) ⋯ (2.26) (2.26)式を(2.23)式に代入すると、 𝜃̂(𝑁) = 𝜃̂(𝑁 − 1) + 𝑃(𝑁 − 1)𝜙(𝑁) 1 + 𝜙𝑇(𝑁)𝑃(𝑁 − 1)𝜙(𝑁)𝜀(𝑁) ⋯ (2.27) となる。ただし 𝜖(𝑁) = 𝑦(𝑁) − 𝜙𝑇𝜃̂(𝑁 − 1) ⋯ (2.28) このようにして導出された(2.26)、(2.27)、(2.28)式が RLS 法である。 RLS 法についての説明が終わったところで、次に可変忘却要素について説明する。これ は時刻 k より𝜏サンプル以前の観測値に対してλ𝜏の指数重みをかける方法であり、評価規範 𝐼𝑁(𝜃) = ∑ λ𝑁−𝑘𝜀2(𝑘) 𝑁 𝑘=1 ⋯ (2.29) を最小化することに対応する。ここで、𝜆は忘却要素(forgetting factor)と呼ばれる 1 以下 の正数である。過去のデータの影響を指数的に軽くし、結果的に新しいデータほど重視す るようになる。また、 𝜏 = 1 1 − 𝜆 ⋯ (2.30) より過去の推測値に対する重みは約 0.3 より小さくなるため、この𝜏はメモリホライゾンと 呼ばれる。図 2.19 にこれを示す。例えば、𝜆 = 0.995のときは𝜏 = 200となる。すなわち、200 個以上過去のデータに対する重みは 0.3 より小さくなり、それらのデータはほとんど利用さ れない。
27 図 2.19 メモリホライズン モデルの同定に可変忘却要素を用いた逐次最小二乗(VFF-RLS)同定法を使用する。 VFF-RLS 法は次の評価関数を最小にする最小二乗推定法を基にしている。 𝐽(𝜃) = ∑ 𝜆𝑘−𝑖(𝑖)𝜀2(𝑖) 𝑘 𝑖=1 ⋯ (2.31) ここで𝜆は忘却要素で、𝜀(𝑖)は時間𝑖での予測誤差である。この忘却要素を可変にすることで、 過渡状態の場合は過去のデータを指数的に忘却することでそれらのデータに対する重みを 減らすことができ、逆に定常状態ではモデルの変動が少ないので、忘却要素を 1 に近づけ ることで過去のデータを積極的に利用することができる。 ここでは、VFF-RLS 同定法のアルゴリズムを以下に示す。VFF-RLS 法の手順は以下の 5 つの手順を繰り返す。 Step1:予測誤差の計算 𝜀(𝑘) = 𝑦(𝑘) − ∅𝑇(𝑘)𝜃̂(𝑘 − 1) ⋯ (2.32) Step2:適応ゲインの計算 𝐾(𝑘) =𝜆(𝑘 − 1) + ∅𝑃(𝑘 − 1)∅(𝑘)𝑇(𝑘)𝑃(𝑘 − 1)∅(𝑘) ⋯ (2.33) Step3:パラメータ推定値の更新 𝜃̂(𝑘) = 𝜃̂(𝑘 − 1) + 𝐾(𝑘)𝜀(𝑘) ⋯ (2.34) Step4:忘却要素の計算 𝜆(𝑘) = 1 −1 − ∅ 𝑇(𝑘)𝐾(𝑘) Σ0 𝜀 2(𝑘) ⋯ (2.35) ここで𝜆(𝑘) < 𝜆𝑚𝑖𝑛のとき𝜆(𝑘) = 𝜆𝑚𝑖𝑛
28 Step5:共分散行列の更新 𝑃(𝑘) =𝜆(𝑘)1 [1 − ∅𝑇(𝑘)𝐾(𝑘)]𝑃(𝑘 − 1) ⋯ (2.36) 𝜆𝑚𝑖𝑛は忘却要素の下限値である。Σ0は追従速度を決定するパラメータで、小さくすると追 従性が向上し、逆に大きくすると適応速度が減少する。 つまり、定常状態では忘却要素を 1 に近づけ、過渡状態では 1 より小さくすることで積 極的に観測値を利用し同定する、といった動作をするので動的な変化に対する積極的な適 応が可能となる。
29
2.2.5 VFF-RLS によるシステム同定実験(オンライン同定)
オフライン同定実験と同じ条件で、可変忘却要素を用いたオンライン同定実験を行った。 メモリホライズンを最短でも 10 は確保するために、忘却要素の下限値を 0.9 とした。シス テム同定で得られたモデルに対し、同一入力に対する実験出力とモデル出力の比較を図 2.20 に示す。今回はデシメーション処理を行った後の信号を用いている。オフライン同定での 同一入力に対する実験出力とモデル出力の比較において、後半 1 周期に対する二乗誤差和 は 1.09×103 であったのに対し、可変忘却要素を用いた適応同定では 7.80×102 と、オフラ イン同定より約 28 %誤差が減少した。これより、フィティング率はオフライン同定より向 上したと言える。 また、得られた同定モデルの周波数特性をオフラインと比較し図 2.21 に示す。なお、オ ンライン同定ではパラメータが変化するので、今回は定常状態 100 個のパラメータ平均値 としている。すると非常にオフライン同定モデルと一致しており、可変忘却要素を用いた 適応同定法が有効であり、正確であることが確認できた。 ここで、オンライン同定に用いている ARX モデルの各パラメータの推移の検証を行う。 ARX モデルは (1 + 𝑎1𝑧−1+ 𝑎2𝑧−1)y(k) = (𝑏1𝑧−1+ 𝑏2𝑧−1)𝑢(𝑘) + 𝑒(𝑘) …(2.37) である。各パラメータ(𝑎1, 𝑎2, 𝑏1, 𝑏2)の時間変化を図 2.22 に示す。図 2.22 の離散時間同定パ ラメータである定常状態 100 個の平均値は {𝑎𝑏1= −1.147, 𝑎2= 0.7163 1= 3.165, 𝑏2= 0.963 となる。また、オフライン同定で得られた離散時間同定パラメータは {𝑎𝑏1= −1.128, 𝑎2= 0.7031 1= 3.209, 𝑏2= 0.9958 である。この値を真値として図 2.22 に点線で重ねて示す。この 2 つのパラメータはよく一 致しており精度よく同定できていることが確認できる。同図より、300 step 程度で素早く各 パラメータが収束していることが確認できる。このことは、図 2.23 に忘却要素の時間変化 を示しているが、全域で高い忘却率を示しており、これが同定パラメータの早期収束に寄 与したものだと考えられる。30
図 2.20 同一入力による実験出力とモデル出力の比較
31 図 2.22 オンライン同定パラメータ 図 2.23 忘却要素の変化 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.85 0.9 0.95 1 1.05 Time [s] F o rg et ti ng f a ct o r 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.85 0.9 0.95 1 1.05 Time [s] F o rg et ti ng f a ct o r
32
2.3 ディジタル制御によるスイッチング電源のシミュレー
ションおよび制御実験
前節でのシステム同定実験により、スイッチング電源の数式モデルを導出することがで きた。そこで本説では、得られたモデルを基に制御器を設計し、シミュレーション、制御 実験を行い、出力応答を確認することで制御器の有効性を検討する。2.3.1 積分+ノッチフィルタ(極零相殺型)の設計
図 2.17 より、モデルの周波数特性は低域がフラットとなっている。そこで積分器を用い ることで任意の制御帯域の制御系を構築することができる。積分器は次式のように表され る。 𝐶(𝑠) =𝑘𝑖 𝑠 ⋯ (2.38) 式中のゲイン kiを変えることで制御帯域を決めることができる。しかしモデルが共振特性 を有するため、制御帯域を共振部分より広げると積分器だけでは発散してしまう。そこで 制御の広帯域化を図るために積分+ノッチフィルタ(極零相殺型)を制御器として用いた。 積分+ノッチフィルタを制御器とした制御系のブロック図を図 2.24 に示す。制御器のパラ メータはそれぞれ 𝑘𝑖= 832 × 𝑥 ⋯ (2.39) 𝐹(𝑠) =(𝑇𝑠 + 1)1 𝑛 ⋯ (2.40) とした。ここで 832 とはボード線図を見ながら設定した数値であり、x は制御帯域を決める パラメータとなる。例えば𝑥 = 1とすると制御帯域は 1 kHz となる。また T はサンプリング 定理から、サンプリング時間の 2 倍以上でなければならず、外乱やその他の要因を考慮し てサンプリング時間の 4 倍の 13.8×10-6 [s]とした。なお、T を小さくすると応答速度が早く なるが、オーバーシュートが出てしまうという、トレードオフの関係となっている。n は制 御対象の相対次数であり、2 次に低次元化したものを制御対象として考えているため今回は n = 2 とした。 また、積分のみの制御器とノッチフィルタを付け足した制御器の開ループボード線図を 図 2.25 に示す。点線が積分のみ、実線が積分+ノッチフィルタの結果である。同図よりノッ チフィルタを付けることにより、制御対象が持っている共振部分を打ち消していることが 確認できる。これにより積分器単体に比べて制御帯域を広げることが可能となる。33
図 2.24 積分+ノッチフィルタ(極零相殺型)のブロック図
34
2.3.2 外乱オブザーバ付き内部モデル制御(DIMC)の設計
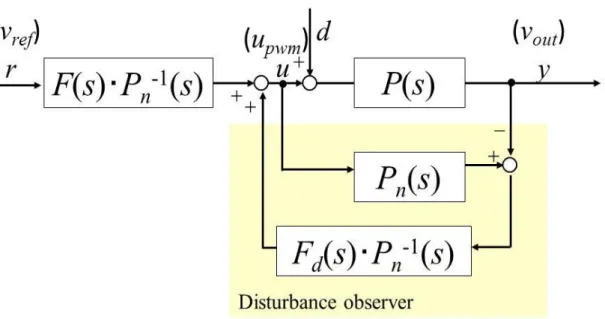
内部モデル(IMC)は、M.Morari によって提唱されたプロセス制御系に対する制御法 である。これは H2制御やスミス予測制御に関連しており、Youla のパラメトリゼーショ ンを基本とした具体的なプロセス制御系の設計法としてまとめられている。 この内部モデル制御系のブロック図を図 2.26 に示す。P(s)、Pn(s)は制御対象とそのノミナ ルモデルを表す。ここで s はラプラス演算子を表す。F(s)は定常ゲインが 1 のローパスフィ ルタであり、IMC コントローラ F(s)×Pn -1 (s)を物理的に実現させるため、この伝達関数がバ イプロパーとなるように選択する。例えば、Pn(s)の相対次数を n とすると、 𝐹(𝑠) = 1 (𝜏𝑖𝑠 + 1)𝑛 ⋯ (2.41) となる。この場合、制御対象が既知とすると、IMC の設計パラメータはフィルタの帯域幅 1/𝜏𝑖 [rad/s]のみであり、設計および調整が容易な点が利点である。また、この制御構成から わかるように、IMC ではモデル化誤差がなく、かつ外乱が存在しなければ、目標値 r から 出力 y までの伝達特性は F(s)となる。すなわち、フィードバックループが無く直列補償器に よるオープンループ駆動である。これに対して、モデル化誤差や外乱 d が存在する場合に のみ、P と Pnの出力の差分を利用し、フィードバックにより誤差補償が行われる。 しかし制御対象が積分特性を有する場合、図 2.26 の IMC 制御系のブロック図を等価変換 した図 2.27 で伝達特性を考えると 𝐹(𝑠) 1 − 𝐹(𝑠)= 1 𝑠{𝑠(𝜏𝑖2𝑠 + 2𝜏 𝑖)} ⋯ (2.42) となり、1 型の積分特性を持つが、これは制御対象のもつ積分特性に起因しており、𝑃𝑛−1(𝑠)に 現れる 1 階微分特性により相殺される。その結果 IMC 制御系には積分特性がなくなってし まい、ステップ外乱に対して追従誤差が常に存在してしまう。そこで IMC に外乱オブザー バを導入することで、上記の問題を解決する。この手法の特徴として、制御対象の逆特性 を利用したオープンループ駆動ベースの制御系で構成され、モデル化誤差と外乱に対して のみフィードバック補償が行われる。これにより、目標値に対してオーバーシュートが皆 無であり、かつ制御対象のノミナルモデルさえ高度に同定できれば制御帯域を極めて広帯 域化でき、安定化、ノイズ特性にも優れるという特徴を有する。35 図 2.26 内部モデル制御系のブロック図 図 2.27 等価 IMC 制御系のブロック図 外乱オブザーバは、制御入力と出力情報より制御対象に加わる外乱を推定でき、それを フィードバックすることで外乱補償を行うことが可能となる。 外乱オブザーバのブロック図を図 2.28(a)に示す。ここで外乱を d、入力を iref、制御対 象の伝達関数を P、そのノミナルモデルを Pn、出力を y とすると 𝑑 = 𝑖𝑟𝑒𝑓− 𝑃𝑛−1𝑦 ⋯ (2.43) となるため、入力と制御対象の逆特性から外乱が計算で求められる。しかし、制御対象に 積分特性を含んでいる場合、出力の積分演算が必要となるためその実現は難しく、また仮 に可能であったとしても高周波でハイゲインとなるため、観測ノイズの影響を非常に受け やすくなる。そこで一例として次式に示すように、外乱 d にローパスフィルタ Fdを通して 得られる出力を外乱の推定値𝑑̂とする。また、n は𝐹 × 𝑃𝑛−1がプロパーになるように決定する。 𝑑̂ = 𝐹𝑑∙ 𝑑 = 1 (𝜏𝑖𝑠 + 1)𝑛𝑑 ⋯ (2.44) これを図示したものが図 2.28(b)である。点線で囲まれた部分が、制御対象への入力およ び出力から外乱を推定するため、外乱オブザーバ(disturbance observer)と呼ばれる。この とき、外乱オブザーバの極は(2.44)式のローパスフィルタの極に相当するため、フィルタ の時定数をできるだけ小さくすることで遅れの少ない推定値を得ることができる。しかし、
+
+
+
y
d
r
P
n(s)
P(s)
F (s) ・P
n1(s)
+
+
+
y
d
r
P
n(s)
P(s)
F (s) ・P
n1(s)
F (s) ・P
n1(s)
Plant model Plant Controlle r36
実際には小さくしすぎると観測ノイズの影響を受け、正しい推定が行えなくなるため、そ の決定にトレードオフは避けられない。また本手法では、図 2.28(b)の等価ブロック図と して図 2.28(c)を用いる。
ここで外乱オブザーバ付き内部モデル制御(DIMC)法のブロック図を図 2.29 に示す。 DIMC の構造は IMC に極めて類似しており、IMC と同様にモデル化誤差が存在しない場合 にはフィードバック補償は働かない。従ってオープンループ駆動型という特徴を持ってい る。 外乱オブザーバのフィルタを Fdとしたときの入出力関係は以下の式で表される。 𝑦 = 𝐹(𝑠)𝑃(𝑠)𝑃𝑛 −1(𝑠) 1 − 𝐹𝑑(𝑠) + 𝐹𝑑(𝑠)𝑃(𝑠)𝑃𝑛−1(𝑠)𝑟 + {1 − 𝐹(𝑠)𝑃(𝑠)} 1 − 𝐹𝑑(𝑠) + 𝐹𝑑(𝑠)𝑃(𝑠)𝑃𝑛−1(𝑠)𝑑 ⋯ (2.45) ここでモデル化誤差がなければ(P(s)=Pn(s)) 𝑦 = 𝐹(𝑠) ∙ 𝑟 + {1 − 𝐹(𝑠)𝑃(𝑠)}𝑑 ⋯ (2.46) となり、オープンループとなっていることがわかる。 (a) (b) (c) 図 2.28 外乱オブザーバのブロック図 P Pn-1 iref y d + +
d
P Pn-1 iref y d + +
d
y P Pn-1 iref + d + Fd dˆ y P Pn-1 iref + d + Fd dˆ y P Pn-1 iref + d + Fd dˆ y P Pn-1 iref + d + Fd dˆ P Pn iref y d + + Fd×Pn-1 dˆ P Pn iref y d + + Fd×Pn-1 dˆ 37
38
2.3.3 シミュレーションおよび制御実験での応答比較
前節で設計した 2 つの制御器と、積分のみの制御器の合計 3 つを用いてシミュレーショ ンを行うことで、実験器への導入を検討する。 ここで DIMC 法をスイッチング電源に適用したブロック図を図 2.30 に示す。図 2.29 との 違いは前後に付いているゲインである。制御量が電圧というアナログ信号であり、それを ディジタルで制御するために変換ゲインを付けている。変換ゲインは 212 [digit]/6.41 [V]= 639 [digit/V]であり、例えば 1 [V]は 639 [digit]に変換される。また、フィルタ F(s)、Fd(s)は 𝐹(𝑠) = 𝐹𝑑(𝑠) =(𝜏𝑠 + 1)1 2 ⋯ (2.47) とし、=1/c=1/(2×2×3000)とする。この場合には制御系の帯域幅は 3 kHz である。 3 つの制御器でのシミュレーション結果を図 2.31 に重ねて示す。シミュレーション条件 は目標値を 1 V 相当の 639 digit、サンプリング時間を 3.41s、制御帯域を 3 kHz とし、入力 をステップ応答としている。実線が DIMC、一点鎖線が積分制御器にノッチフィルタを付加 したもの、点線が積分制御器のみの応答結果である。また、これを定量的に測定したもの を表 2.3 に示す。 図 2.31 よりいずれの制御器も目標値に対して定常偏差なく追従している。なお、積分器 のみの応答波形は図では収束していないが、これは収束するまでに時間がかかるためであ り、図の時間レンジを長くすることで定常偏差がないことが確認できた。また、積分器の みではオーバーシュート、整定時間が大きいが、ノッチフィルタを付けることによりオー バーシュートが抑えられ、整定時間も小さくなっており、ノッチフィルタの有効性が確認 できる。制御帯域を 3 kHz より上げると積分器では発散してしまうため、ノッチフィルタを 付けることにより制御帯域を広げることができることを確認した。積分器での発散する制 御帯域は、フルビッツの安定判別法より 2647.4 Hz と求められるため、理論通りの結果とな っている。 次に DIMC と積分+ノッチフィルタを比較すると、表 2.3 より、DIMC ではオーバーシュ ート、整定時間ともに改善されている。これは、ノッチフィルタに含まれている T が、サ ンプリング定理により 0 に近くすることができなく、それにより制御性能に制約がかかる ためである。39 図 2.30 DIMC ブロック図 図 2.31 各制御器でのシミュレーション結果 表 2.3 各制御器でのオーバーシュート、整定時間 オーバーシュート(%) 整定時間(ms) DIMC 0 0.13 積分+ノッチフィルタ 8.76 0.18 積分 23.6 2.27
40 次に制御帯域を 4 kHz、外乱を 2 ms に目標電圧の 50 %相当の 320 digit としてシミュレー ションを行った。積分器のみでは発散するために、DIMC と積分+ノッチフィルタでのシミ ュレーション結果を図 2.32 に示す。また、表 2.4 には定量的な数値を示している。 2 つの制御器の応答を比較すると、表 2.3、2.4 より積分+ノッチフィルタでは帯域を上げ るとオーバーシュートも増加してしまうが、DIMC では変化せず 0 %のままであることが確 認できる。整定時間は制御帯域が高くなっているため、どちらの制御器でも早くなってい る。また、DIMC では外乱オブザーバが働くために、積分+ノッチフィルタに比べ外乱に対 するドロップ量が抑えられている。 図 2.32 外乱を考慮したシミュレーション結果 表 2.4 2 つの制御器での各値 オーバーシュート (%) 整定時間 (ms) ドロップ量 (%) 外乱に対する 整定時間(ms) DIMC 0 0.10 46.8 0.26 積分+ノッチフィルタ 19.3 0.16 67.9 0.26
41 積分+ノッチフィルタには積分器がついているため、ノッチフィルタの次数を 1 つ下げて もシステムはバイプロパーとなる。そこで(2.40)式において𝑛 = 1としてシミュレーショ ンした結果を図 2.33 に示す。また DIMC の結果も重ねて示す。シミュレーション条件は帯 域を 4 kHz とした。ここで積分+ノッチフィルタのオーバーシュートはフィルタが 2 次の時 よりも改善されて 4.53 %となっていたが、次数を下げても DIMC の方が良い結果が得られ ていることがわかった。 図 2.33 フィルタの次数を下げたシミュレーション結果
42 シミュレーションによる各制御器の有効性を確認したため、次に実験を行うことで有効 性の検証を行う。実験条件はシミュレーションと同様に制御帯域を 4 kHz、目標値を 639 digit、 入力電圧を 12 V、サンプリング時間を 3.41 s、ノッチフィルタの次数は n = 2、無負荷とし た。制御対象モデルは前節のオフライン同定実験で導出したものを用いた。ステップ応答 実験の結果を図 2.34 に示す。またオーバーシュートと整定時間を定量的に求めたものを表 2.5 に示す。 図 2.34 より、目標値に対していずれも定常偏差なく追従していることが確認できる。波 形もシミュレーション結果とほぼ同じ形になっている。また、表 2.5 よりオーバーシュート、 整定時間ともに DIMC では改善されていることがわかる。表 2.4 と比較するとオーバーシュ ートが増加しているが、これはシミュレーションを行う際にシステム同定を行いモデルの 低次元化をしたために、実験ではこのモデル化誤差が生じからであると言える。 シミュレーションや実験結果の波形で、DIMC では制御入力にアンダーシュートが見られ る。これは不安定零点がある場合に見られるものであるが、アンダーシュートの大きさは 許容できる範囲であるため問題ないと考える。 図 2.34 ステップ応答の実験結果 表 2.5 オーバーシュート、整定時間 オーバーシュート(%) 整定時間(ms) DIMC 2.82 0.08 積分+ノッチフィルタ 31.9 0.26
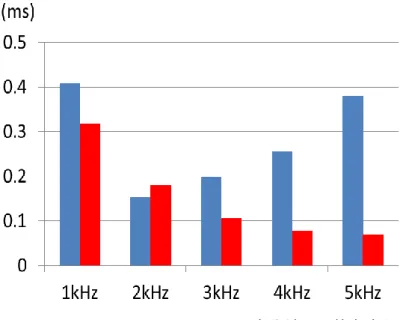
43 2 つの制御器において、制御帯域を 1、2…5 kHz としたときのオーバーシュート、整定時 間を視覚的に見やすく棒グラフにしたものをそれぞれ図 2.35、2.36 に示す。図 2.35 より、 DIMC では帯域を広げても、積分+ノッチフィルタに比べオーバーシュートが相対的に非常 に小さいことがわかる。 また図 2.36 より、整定時間において広帯域にすると DIMC では整定時間が小さくなるこ とがわかるが、これは定常ゲインが大きくなるからである。一方で積分+ノッチフィルタで は一度減少した後に増加している。これは、広帯域にすると応答速度は上昇するが、オー バーシュートが大きくなりすぎて定常状態になるのに時間がかかるためである。 このことから各帯域においてオーバーシュート、整定時間ともに DIMC の方で改善され ており、DIMC の有効性が確認できた。 図 2.35 各帯域でのオーバーシュート
44
45
2.3.4 抵抗負荷での制御対象の変動を模擬した制御器のシミュレー
ション結果
出力端に抵抗を付加すると制御対象の周波数特性、特に減衰率が変化することが 2.2.3 項 のシステム同定結果から確認できる。そこで本項では、制御対象の負荷変動を模擬して数 式モデルの減衰率を変化させてシミュレーションを行うことで、制御器のロバスト性を確 認する。 制御対象の減衰率を+20 %としたときの 2 つの制御器でのステップ応答のシミュレーショ ン結果を図 2.37 に示す。逆に減衰率を-20 %としたときのシミュレーション結果を図 2.38 に示す。また、減衰率を-40 %~+40 %まで 20 %刻みでシミュレーションした時の DIMC で のオーバーシュート、整定時間を表 2.6 に、積分+ノッチフィルタでの結果を表 2.7 に示す。 なおシミュレーション条件は制御帯域を 4 kHz、サンプリング時間を 3.41 s とした。 図 2.37、2.38 より、負荷変動によるモデル化誤差を模擬した時の出力応答は、赤線の DIMC の方がオーバーシュートが小さく、立ち上がりも早いため応答の良さが確認できる。また 表 2.6、2.7 より、減衰率をそれぞれ変化させた時、DIMC ではオーバーシュートが 0~2.34 %、 整定時間が 0.09~0.12 ms という振れ幅で変動している。一方で積分+ノッチフィルタではオ ーバーシュートが 18.6~27.8 %、整定時間が 0.15~0.25 ms という様にモデル化誤差により 変動している。つまり DIMC の方がモデル化誤差に対するオーバーシュート、整定時間の 変動が小さく、ロバスト性の高い制御器であると言える。 図2.37 減衰率を+20%としたときのシミュレーション結果46 図2.38 減衰率を-20%としたときのシミュレーション結果 表2.6 DIMC のオーバーシュート、整定時間 減衰率(%) オーバーシュート(%) 整定時間(ms) -40 2.34 0.12 -20 0.65 0.11 0 0 0.10 +20 0.33 0.09 +40 1.10 0.09 表2.7 積分+ノッチフィルタのオーバーシュート、整定時間 減衰率(%) オーバーシュート(%) 整定時間(ms) -40 18.6 0.15 -20 20.7 0.16 0 22.5 0.22 +20 25.4 0.24 +40 27.8 0.25
47
第 3 章 Scanning Electron Microscope
3.1 SEM の概要
3.1.1 SEM の概要
本項では、実験装置である SEM(走査型電子顕微鏡、Scanning Electron Microscope)の概 要について述べる。 本研究に用いた実験装置のシステムの構成図を図 3.1 に示す。SEM はもともと画像を観 察するための装置だが、他の装置を付加することで描画を可能にしている。PC で描画パタ ーンを作成し、ラスターイメージプロセッサを介してビームブランキングとステージコン トローラに信号を送る。これにより SEM のビームのオン・オフやステージ移動を知能的に 制御することができる。SEM 内の資料にどの程度ビームがあたっているかは電流計により わかる。また PC 画面でリアルタイムでの観察、調整が可能となっている。 図3.1 SEM のシステム構成図
48 実験装置の写真を図 3.2 に示す。SEM は日本電子(株)製の JSM-5310 を用い、ステージ コントローラとビームブランキングは(有)テック・コンシェルジェ熊本社製、電流計は (株)アドバンテスト社製の R8240 を用いた。また、実験装置の仕様を表 3.1 に示す。 図 3.2 実験装置の全体図 表 3.1 実験装置の仕様 実験装置の概要 倍率 35~200,000 倍 像の種類 二次電子像 光源の材料 タングステンフィラメント
49
3.1.2 SEM の動作原理
本項では SEM の動作原理について述べる。SEM の概略図を図 3.3 に示す。本研究で用い られている SEM の電子銃にはタングステンフィラメントが採用されており、フィラメント を電流で加熱することで電子を発生させている。収束レンズはバイアス電圧により、フィ ラメントから放出された電子を収束するレンズである。対物レンズは合焦位置を調整する レンズであり、対物レンズに流れる電流を変化させることで磁界を変え、電子線が焦点を 結ぶ高さを変えることができる。走査コイルは磁界により電子線を偏光させ試料表面を走 査するコイルとなっており、走査する範囲や観察倍率も走査コイルで調整できる。走査コ イルで 2 次元的に試料の表面を走査し、試料面から発生する 2 次電子を検出器で集めて、 光電子増幅倍管で増幅し、その信号を電子プローブと同期して走査する CRT に送り、テレ ビジョンと同様な方式により 2 次元的な走査像を得る。 図 3.3 SEM の概略図50
3.2 プログラムの解析
第 1 章でミニマルファブの実現には SEM を知能化する必要があり、現在ステージ系と画 像系を1 対 1 に調整するプログラムがあることを記した。そのプログラムを解析したとこ ろ、調整には粗調整プログラムと微調整プログラムの 2 つがあることがわかった。そこで 本節では 2 つのプログラムを解析した結果を記す。3.2.1 粗調整プログラムの解析
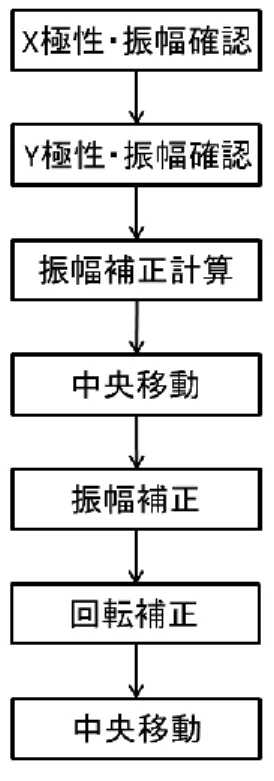
粗調整プログラムではステージ系と画像系を大まかに調整する。粗調整のフローチャー トを図 3.4 に示す。実験を行う際にはステージ系と画像系を調整するために、ユーザーが最 初に目印を設定し、プログラムを開始することで図 3.4 の粗調整の全てのプログラムが回る。 ステージを移動させて画像をスキャンすることで、目印がどのように動いたかを確認し、 それをもとに調整する。 粗調整プログラムではまず X 極性と振幅を確認する。X 軸方向に対する最小分解能を取 得するためにステージを少しだけ移動し、画像をスキャンして取り込む。画像に移動が見 られるまでステージの移動距離を倍にしていく。画像の移動が認められ、極性が確認でき たら、極性方向にステージを移動させる。移動距離は極性確認で得られた最小分解能距離 を最小移動距離とし、125 pixel を超えるまで倍にして伸ばす。 Y 極性、振幅確認は上記の手順と同様で、ステージの移動方向は Y 軸方向となっている。 振幅確認後ステージ系と画像系の誤差から振幅の補正値を計算する。 補正量を計算したら目印が中央になるようにステージを移動する。移動量は最大 50 pixel となっている。これは、大きく移動すると目印を見失う可能性があるためである。1 回移動 する度にスキャンを行い、ズレを調整する。 中央に移動したら振幅補正を行う。補正方法は先に計算で求めた補正量を用いて、それ をステージの移動に適用させる。 振幅の補正が適用されたら次に回転の補正をする。中央から左方向に 125 pixel 離れた位 置を基準点とし、中央と基準点を交互に移動してスキャンをすることでステージ系と画像 系のズレを求め、回転補正値を算出して適用する。 回転補正が完了したら最後に中央位置にステージを移動して粗調整動作は終了する。粗 調整の動作は基本的にはオープンループ駆動となっており、回転補正時のみクローズドル ープとなっている。回転補正時は補正量を適用するが、補正量がしきい値以下になるまで 繰り返しステージ移動と補正を繰り返す。51
52
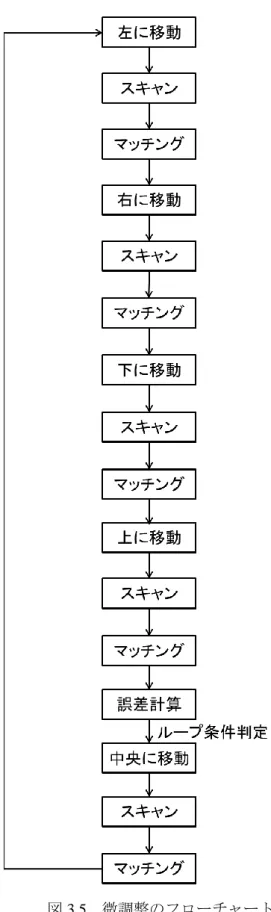
3.2.2 微調整プログラムの解析
粗調整でステージ系と画像系の大まかな調整ができたら、微調整プログラムを開始する。 そのフローチャートを図 3.5 に示す。微調整プログラムは図のようにクローズドループとな っており、誤差がしきい値以下になるまでループを繰り返す。またループは 2 つの種類が あり、1 つ目にステージの移動距離が 50 m でしきい値が 1 m のループ、誤差がしきい値 以下になったら 2 つ目に移動距離が 240 m でしきい値が 0.3 m のループに入る。誤差が小 さくなり 2 つのループから抜けたところで微調整プログラムは終了し、ステージ系と画像 系の調整が完了となる。 微調整ではあらかじめテンプレート画像を保存しておき、左に移動するところからプロ グラムが動く。ステージ移動後画像をスキャンしてテンプレートマッチングを行う。テン プレートマッチングについては 3.3 節で記す。テンプレートマッチングにより左移動時のス テージ系と画像系の誤差を求める。誤算算出後、中央より右に移動し、スキャンとマッチ ングを行って誤差を求める。下方向と上方向に関しても同様に行い、4 方向に対する誤差が 求められたところで、振幅誤差、角度誤差等を算出し補正を掛ける。 以上が微調整プログラム中の 1 ループの流れであり、誤差計算時にしきい値によるルー プ判定条件を行う。ループになると補正を適用して次のループを開始する。1 回目のループ 判定条件から外れると、移動距離を伸ばして同様のループを行う。2 回目のループ判定条件 から外れることで微調整プログラムは終了となる。53