簡便 構築可能 ロボッ プラッ フォームの研究
― Universal Robot Connector の提案―
Study on a Robot Platform which enables to Construct Conveniently
Proposal of Universal Robot Connector
○学 高橋永 千葉工大 正 林原靖男 千葉工大
Eiji TAKAHASHI, Yasuo HAYASHIBARA, Chiba Institute of Technology, [email protected]
In this paper, we propose a robot platform which enables to construct conveniently. We have already proposed a method to construct robot by USB devices. However, the interface of the proposed devices only provide power supply and communication. To construct robot, we should do many things, fixing parts, getting device profiles, make programs to control robot, and so on. Some educational robots provide convenient way to construct robot. However, it demands to make the program according to the configuration of the connected parts. To solve these problems, we propose a rapid prototyping system with a Universal Robot Connector. It enables to construct robot system conveniently. We introduce the system with the Universal Robot Connector and confirm its effectiveness. Furthermore, we apply it to autonomous mobile robot.
Key Words: Universal Robot Connector, USB, Robot Platform, Rapid Prototype, Ontology
1.
緒言
本研究 従来 USBを用い 簡易的
を提案 有効性を検証 [1]~[3] 具体的
や ン USB を開 をPC
接続 こ 自 び遠隔制御 を 比較的 簡便 構築 環境を提供 こ を試 研究 実際 い 教育機関 試験的 入 効果を 検証 い [1] 研究 USBを用い こ PC 計算
能力を有効 活用 比較的簡便 製作
こ こ を確認 USB 提供
を駆動 電源 通信部分 あ
を構築 必要 要素 関
開 者 独自 製作 こ 必要 例え
を固定 ニ 関 新 製作 必要
あ 開 時間を要 要因 こ
対処 一 方法 ン [6]
構築を容易 行え 教育 あ 計算能力 制限 大 外力 耐え い いう問題 あ 多 場合 接続 応 ソ を書 直 必要 あ
本研究 こ 問題を解決 こ を目指
を提案 有効性を検証 こ
を目的 提案 簡便 構築
組 換え 容易 あ 概念的
電気回路 試作 用い 近い 部品
を接続 穴を持 ニ 対
や ン 部品を接続 こ 簡便 を
構築 を目指 本稿
関 論 接 続 部
URC(Universal Robot Connector) 関 検討
2.
提案するシス ム
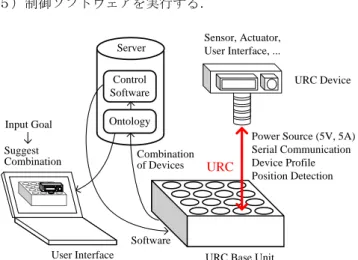
提案 を示 接続 新 USBを URC(Universal Robot Connector)を提案 こ USB 提供 電源(USB2.0 5V, 0.5A)及び 通信機能 加え 以 3 機能を提供
機械的強度 高い接続部 提供 接続位置 提供
こ を接続 PC
や ン 位置関係 含 機構を把握
こ 組 合わ 対 制御ソ
を予 録 こ 制御
を開始 こ 能 あ 多 組 あわ を記述 膨大 を扱うこ 必要
ン [7]を用い 制御ソ 選択 ン GUIを使用 こ を用い
を開 手順 例 以 あ
作業 目的を入力
ン を用い 抽出 組 合わ 選 択肢をGUI 提示
接続 応 選択肢 再抽出さ 接続 終了 時点 制御ソ URC
ニ ン さ
制御ソ を実行
URC Device
Ontology Control Software
URC Base Unit
Power Source (5V, 5A) Serial Communication Device Profile Position Detection
URC
Sensor, Actuator, User Interface, ...
Input Goal
Combination of Devices Server
User Interface Suggest
Combination
Software
Fig. 1 Proposed Robot System
こ 対 知識 や
新 開 ソ
接続状況や 得 を
開 ソ 関 録
3. Universal Robot Connector
2 UR 物理的 電
気
い い方向
USB 接続
さ
全体 や各
経験 助言を 目的
沿 開 を行うこ こ
目的 組 合わ 対 制御ソ
予 用意さ い 場合 手順 あ 新 目的 さ
新 組 合わ 対 制御ソ
を開 い を 組
以 要 あ 考え
を 録 環境
提示 制御ソ を開 や い環境
実行 環境を提供 こ 必然的 ソ
蓄積さ い 組 を構築 こ ニ 選択 自 を維持 従来
依存 共有 こ 難 ソ 再
利用性を高 こ 考え
C 概念 を示 URC
的接続を行う ネ あ OSI参照 物理層
あ 機械的 強度を得 ネ 筒形状
を選択 筒 場合 自 部品 付 方向を選択
こ 利点 点 方向を固
定 い場合 複数 穴を使用 複数 穴を使 用 こ 接続 強度を増 こ 穴 直径や 深さ 対 さ 検討 必要 あ 現 表 1 う 値を用い い URC 対象
大電流を流 こ を前提 い 接点 面積 あ
程度広いこ 要求さ 本
十分 面積及び 力 筒 軸 垂直 面 広 電極を配置 う 形状を選択
こ 時 危惧さ 挿入時 許容さ
電流 流 装置を破壊 うこ あ さ
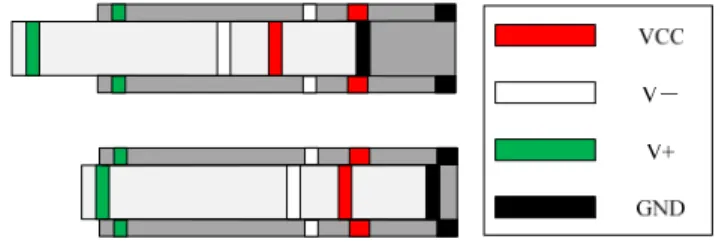
USB 電源2本 信 線2本 4本 端子 あ 必 電
源 接続さ う URC こ 求
こ を踏 え 開 3 示 電極 配置 こ う 電極を配置 挿入時 端子同 士 接触 あ 最終的 接続 端子 組 合わ 閉回路を構成 い さ 電極 位置を調 整 こ 一般的 USB 同 必 電源 接続
う い
さ 一般的 PC
位置を検出 こ 難 い 本 接続 同時 位置関係 得
実験的 穴 ン を 付
有無を検出 接続さ
関 USBを IDを 得
ID 相当 を 得
形状や機能 情報を予
録 自身 を保存
保存 こ 管理 容易 いう
あ 接続 こ 難 い場合 制御用
ン を構築 必要
を提供 こ ン ネ 接続 い ン
ン 状況 使用 う
Fig. 2 Concept of Universal Robot Connector
Fig. 3 States of Connecting with URC
Table 1 Specifications of URC Plug and Receptacle cle
URC Plug URC Recepta
Outside Diameter 8 mm 10 mm
Inside Diameter 6 mm 8 mm
Length 50 mm 50 mm
4.
開発したプロ タイプシス ム
以 指.1 URC接続部
URC接続部 を示
主 電気的 接続を検証
針 基 を開
以 URC接続部 URC ニ URC 順 解説
4
4 開
心 金属端子 構成さ い 心
φ6mm φ8mm 金属端子
φ8mm 黄銅を用い 構成さ い
ン 金属端子 端子保持部 構成さ い
ン φ10mm 金属端子 ン青銅板 端子保持 部 ン を用い 3種類 部品 構成さ い
ン 蔵さ 各 挿抜を検出 こ URC
URC ニ 付 い URC
側 付 こ
あ 機構的 強度 関 検討 い 予定 あ
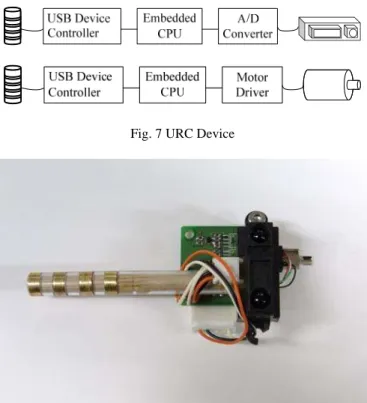
Fig. 7 URC Device
Fig. 4 Developed URC
4.2 URCベースユニッ
提案 中核 位置 URC ニ
あ 5 構成を示 6 開
URC ニ を示 う URC
を等間隔 配置 い こ 範 URC 付 位置を任意 指定
位置 検出 各 付 反射型
ン を用い URC ニ ン
信 を処理 CPU あ 検出 位置を USB
を ン ン 送 う い
Fig. 8 Developed URC Sensor Device (PSD Range Sensor)
...
Fig. 5 URC Base Unit
Fig. 9 Developed URC Motor Device
Table 2 Main Parts List of URC Motor Device
Category Company Name
MCU Microchip PIC18F14K50
MOSFET P-CH FAIRCHILD FDS4935
MOSFET N-CH FAIRCHILD NDS9936
Current Limiter BCD Semiconductor AZ1117-ADJ Fig. 6 Developed URC Base Unit
5.
プロ タイプロボッ の構築
開 有効性を検証
自 移動 を構築 動作確認を行 10 URC ニ URC を用い 構築 対向二輪型
を示 URC ニ 1
URC ン 1 URC 2 を接続
こ 対向二輪型 を構築 い URCを
URC ニ 固定さ 電力供給
通信 行わ こ を確認 URC ニ 4.3 URC バイス
URC ニ 接続 URC ン
2種類を開 7 URC
構成を示 8 9 開 URC
ン URC を示 さ 表2
URC 使用 部品を示 URC ン
URC 開 従来研究 USB ン USB
を 開
PCを接続 こ Plug and Play 種類
位置 認識さ PC を制御 う
こ を確認 さ 接続 種類 位置
録 ソ 自動的 起
動 を制御 こ こ 確認
11 URC ニ 接続 を表示
GUIを示 い 任意 位置 接続 い
情報を表示 い 12 情報や位置 基 い 制御ソ を選択 い 様子を示 い
こ う 接続 移動 を構築 こ
簡便 を構築 こ
Fig. 12 Selecting Control Software
6.
結論
本稿 簡便 構築 能 研
究 Universal Robot Connectorを提案 有
効性を実験 検証 URCを用い こ
接続を容易 接続さ 情報を活用
こ 負担を大 減 能性 あ こ
を示
文献
[1] 一澤勝弘 高橋永 竹林隆太 河 光 林原靖男 ”USBを
用い 簡易的 教 開 ” 日本機械学会 ニ 講演会'11予稿集 2A2-H04, 2011. Fig. 10 Developed Prototype Autonomous Mobile Robot [2] 高橋永 林原靖男 ”USB を用い 自 移動
開 ” 日本機械学会 ニ
講演会'11予稿集 2A2-H05, 2011
[3] 高橋永 林原靖男 ソ を活用 移動 提案
日本機械学会 ニ 講演会'10 予稿集
1P1-G20, 2010.
[4] 前 香織, 相原玲二, 西 浩二, 近堂徹, 岸 崇志, 浦大智,
谷口和久, 平賀博之, 監視 制御 ネ ワ 学 校教育 応用( ン ネ 及び一般) , 情報処理 学会研究報告. QAI, お高品質 ン ネ が, pp.25-30, 2005.
[5] 徳山陽人 USB ン 搭載型 型 ン
開 第 18 回 日 本 学 会 学 術 講 演 会 予 稿 集 , pp.119-120, 2000.
[6] LEGO Group. "LEGO.com MINDSTORMS : Home". LEGO.com Home. (online), available
from<http://mindstorms.lego.com/en-us/Default.aspx>, (accessed 2012-03-12).
[7] McGuinnness. D.L. and van Harmelen F. “OWL Web Ontology Language Overview”. World Wide Web Consortium (W3C). (online), available from<http://www.w3c.org/TR/owl-features/>, (accessed 2012-03-12).
Fig. 11 GUI Displayed State of URC
![Fig. 10 Developed Prototype Autonomous Mobile Robot [2] 高橋永 林原靖男 ”USB を用い 自 移動](https://thumb-ap.123doks.com/thumbv2/123deta/5699340.16839/4.892.63.432.323.590/developed-prototype-autonomous-mobile-robot.webp)
