第2章 質点系と剛体
2.1 二体問題
我々の身の回りにあり、通常観察する物体の多くは、質 点の集まりであると考えられ、この現象を理解すること は大切である。
複数の質点の集まりを質点系(system of particles)といい、
2個の質点からなる質点系の運動を調べる問題を二体問 題(two-body problem)という。
2.1.1 運動の第3法則
質量m m1, 2の2つの質点が互いに力をおよぼし合いながら運動している場合を考えよう。
質点1が質点2におよぼす力をF12、質点2が質点1におよぼす力をF21とする。
質点の位置ベクトル(1.2 節参照)をr , r1 2とするとき、質点1からみて質点2の位置は r =r2 −r1で与えられる。
このように質点が力をおよぼしあっている時に成り立っていると考えられる最も基本的 な法則は、
[法則 2. 1] 運動の第3法則
2つの質点が互いにおよぼし合う力はそれらを結ぶ線上にあって、大きさが 等しく向きが反対である
という運動の第3法則である。
これは、作用・反作用の法則とも呼ばれる。
式で表わせと、
F12 =−F21 (2. 1) であり、これらの力はr= r2−r1に平行である。
m1
O
r
m2
r1
r2
図 2‑ 1 2つの質点
に働く力
2.1.2 重心
2つの質点のそれぞれに対して運動方程式をたてると、
m d
dt m d
dt
1 2
1 2
2 2
2 2
r F r F
21
12
=
=
(2. 2)
となる。
上式をそれぞれ加え、式(2.1)を用いると、F12 +F21 =0となるので、
d
( )
dt
m m
2
2 1 1r + 2 2r =0 (2. 3)
を得る。
M =m1+m2(質点系の全質量)として、
MR=m1 1r +m2 2r (2. 4) によって重心(または質量中心)の位置を定義しよう。
成分で書けば、次のようになる。
MX m x m x MY m y m y MZ m z m z
= +
= +
= +
1 1 2 2
1 1 2 2
1 1 2 2
右上図に示すように、これは2つの質点を結ぶ線分を質量の逆比に内分する点G P G P G1 / 2 =m2 /m1
である。
よって、式(2.3)は、
Md dt
2 2R 0
= (2. 5)
となり、重心Gは加速度が零、つまり等速運動をする。
その速度は最初に零ならば、いつまでたっても零、つまり重心は不動に保たれる。
m
1m
2P
1P
2G
図 2‑ 2 二体系と重心
2.1.3 換算質量と運動方程式 式(2.2)を
d
dt m
d
dt m
2 2
1 21 2
2 2
2 12
1 1
r F
r F
1 =
=
として引き算すると、r= r2−r1および式(2.1)を用いて、次式が得られる。
( )
d
dt m m
d
dt m m
2
2 2 1
2 12
1 21
2 2
1 2
12
1 1
1 1
r r F F
r F
− = −
= +
ここで、
µ = +
1
1 1
1 2
m m
(2. 6)
によって、この2質点の換算質量を定義すると、上式は、
µd dt
2
2 12
r =F (2. 7)
という1個の質点に対する運動方程式と同じ形の式になる。
一般に、力F12は2質点間の相対座標r(=r2 −r1)の関数である。
[例題 2. 1]
2 つの恒星P(質量m1)とQ(質量m2)の重心に対する運動を考える。重心Gを原点にとっ て、恒星Pの座標をr1、恒星Qの座標をr2とする。相対座標r=r2−r1を使うと、万有引 力 f r( )は
f r Gm m r ( ) = − 1 2
2
とかける。恒星Pの運動方程式をr1を用いて、恒星Qの運動方程式をr2を用いて表わせ。
m1 >>m2のとき、恒星Pと恒星Qの運動方程式はどうなるか。
[問題 2. 1]
同じ質量の2つの物体をひもで結んで滑らかな水平面上に密接して置いてある。片方の物 体に速度 v(その方向はもう一方の物体から離れる方向)を与えた後、この系はどのような 運動をするか説明せよ。ただし、ひもがピンと張られたときの衝撃によるエネルギーの損 失はないものとする。
[問題 2. 2]
質量m1,m2の2個の質点PとQが、バネで結ばれてい る系を考える。両端の質点の変位をx x1, 2とし、バネの
力はフックの法則に従うとする。重心系における運動方程式を求め、質点の変位を時間 の関数として示せ。ただし、バネの力の定数をk k( >0)とせよ。
m1 m2
P Q
x1 x2
2.2 重心とその運動
2.1 節では2質点が相互作用している系を扱ったが、このように扱えるのは2質点の問 題(二体問題)までであって、三体問題以上の多体問題になると解析的に厳密な扱いは不 可能であることが証明されている。
一般に、地上で我々が扱う通常の物体は大きさをもっているから一般には質点としては 扱えない。そのような物体(流体なども含めて)でも、これを微小部分に細分して考えれ ば多数の質点の集まりとみなすことができる。
質点 1,2,3,...が互いに力をおよぼし合っていて、i 番めがj番めにおよぼす力をFij とする。このように質点系内で互いにおよぼし合っている力を内力とよぶ。
いま考えている質点系にはこのほかに外部からも力が作用しているものとして、i 番め の質点が受けている外力をFiと表わす。
各質点の質量をm1, m2, m3,...、それらの位置をr , r , r ,1 2 3 ...として、運動方程式は、
m d
dt m d
dt
1 2
1
2 1
2 2
2
r F F F
r F F F
21 31
2
2 12 32
= + + +
= + + +
...
...
...
(2. 8)
これらを全部加えあわせると、内力については作用・反作用の法則によりFij +Fji =0が 成り立つから、右辺の和としては外力だけが残って、
m d
dt m d
1 dt
2
2 2
2 2
r r
F F
1 2
1 2
+ + =... + +... (2. 9)
また、
M =m1 +m2+...
として、重心(質量中心)の位置Rを
MR =m1r1 +m2r2+... (2. 10) によって定義すると、式(2.9)は、
Md
dt i
2 2
R =F1 +F2+ =...
∑
Fi (2. 11)この式は質量がMで位置Rにある一個の質点に外力F1+ +...F2 が作用している時の運動 方程式になっている。つまり、
質点の重心は、質点系の全質量がそこに集中し、外力も全てそこに働いている時の一つ の質点と全く同じ運動をする
ことを意味している。
すなわち、実際に大きさのあるものを質点とみなし、第1章で調べたような方法で扱っ てよいのはこのためである。
2.3 運動量と運動量保存
<力のモーメント>
“てこ”などのように、力Fによって原点Oのまわりで物を
回転させる場合を考える。
回転の大きさは、
①力の大きさF
②点Oから作用線 AB へ下した垂線の長さl に比例する。
図 2‑3 の場合、時計の針と反対まわりであるので、モーメント の方向は紙面に対して手前向きである。
O点に関するF のモーメントを、大きさがFlで、紙面に対して 手前向き方向を持つ回転軸と向きをもったベクトルと定義し、
次ページ式(2.15)より、
N =r×F (r =OA) (2. 12) で表わす。
rの成分を( , , )x y z 、F の成分を(F Fx, y,Fz)とすると、Nの成分は式(2.18)より、
N yF zF
N zF xF
N xF yF
x z y
y x z
z y x
= −
= −
= −
(2. 13)
である。
N = Fl= Frsinθ (2. 14) はrとFを2辺とする平行四辺形の面積である。
rとFが平行または反平行(θ =0かπ)なときN =0である。
r O
A F
l θ
B
図 2‑3 力のモーメント
定義[2.1] モーメント(moment)
この積F lを、O点に関する力Fのモーメントの大きさとよぶ。
モーメントの方向は力の作用線 AB とO点で作る平面に垂直であり、O点を通る軸まわり に、右ねじの進む向きを正とする。
右ねじを回す 回転方向
ねじの進む 方向
図 2‑4 右ねじ
One Point 外積(ベクトル積) 2つのベクトルAとBから、
大きさ:C = ABsinθ(θはAとBの間の角, θ π< ) 向き :AとBの両方に垂直でAからBの向きに右 ねじを回した時にそれが進む向き
をもつベクトルCをつくることができる。これをAとB の外積(ベクトル積)といい、
C= ×A B (2. 15) で表わす。
A B× = −(B×A) (2. 16) に注意すること。
右手系の座標軸方向の単位ベクトルi, j,k(x,y,z 軸の方 向を持ち長さが1のベクトル)に関して、
0
,
,
,
,
,
=
×
=
×
=
×
−
=
×
=
×
−
=
×
=
×
−
=
×
=
×
k k j j i i j k i j i k
i j k i k j k i j k j
i (2. 17)
が成り立つ。また、A= Axi+Ayj+Azk, B = Bxi+Byj +Bzkと すると、上式から、
( ) ( )
( ) ( ) ( )
k j i
k j
i
k j i k j i B A C
z y x
x y y x z
x x z y
z z y
z y x z
y x
C C C
B A B A B
A B A B
A B A
B B B A
A A + +
=
− +
− +
−
=
+ +
× +
+
=
×
=
(2. 18)
[例題 2.2]
xy面上で原点 O を中心とする円板が角速度ω[rad/s]で回っ ている。円板上の位置r における速度ベクトルvをω、r 、 および、z方向の単位ベクトルkで表せ。
(解答)
図において P は位置ベクトルr の点を表す。一般に、rθは円周を示す ので、角速度ω[rad/s]を用いて、点 P の速さはωrであり、速度の方 向はr とkとに垂直であって、k ×r の方向を向いている。従って、
v = ×k
( )
ωr =ω(
k×r)
成分で書けばk =( , , )0 0 1 、r =( , , )x y0 であるので、
vx = −ωy, vy =ωx, vz =0
[問題 2.3] A=2i −3j −k,B = +i 4j −2kの場合、次のものを求めよ。
(1) A B× (2) (A B+ )×(A B− ) [問題 2.4] 次の各式を証明せよ。
(1)(A B× )2 +(A B• )2 = A B2 2 (2)(A B+ )×(A B− )=2(B×A)
C=A×B
O ABsinθ A
θ
B
Bsinθ A
θ B
A
図 2‑5 外積
k=i×j
S=1 O i
j
P ω
x y
r v
k O
<運動量>
重いものが大きな速さで動いているほど、大きな運動量をもっている。
<角運動量>
xy平面内で行われる運動を考える。
rもpもz成分はもたないから、それらの面に垂直である力のモーメントNと角運動量l はz成分だけしかもたない。式(2.18)より、
N xF yF
l xp yp
z y x
z y x
= −
= − (2. 21)
上式を時間で微分し、式(2.19)
dt mdy dt p
mdx
px = , y =
を代入すると (次式の導出は次ページ参照)、
2
2 2
2
dt x myd dt
y mxd dt dlz
−
= (2. 22)
運動方程式Fx =mx&&, Fy =my&&より、
dl
dtz = xFy −yFx (2. 23)
式(2.21)を利用すると、上式から次式を得る。
dl
dtz = Nz (2. 24)
定義[2.2] 運動量(momentum)
質量mの質点が速度vで運動しているときに、この質点は運動量 p=mv (2. 19)
をもっているという。 m
v
定義[2.3] 角運動量(angular momentum) 運動量のモーメント
l = ×r p (2. 20a) を角運動量という。
l=( ,lx ly, )lz 、r =( , , )x y z 、p=(p p px, y, z)とすると、式(2.18)より lx = ypz −zpy, ly =zpx −xpz, lz = xpy− ypx (2.20b)
r P
l
m
一般の運動では、x成分やy成分でも同様な関係が成り立ち、ベクトルを使って、
d dt
l =N (2. 25)
と表わされる。すなわち、角運動量の時間的変化の割合は力のモーメントN に等しい。
<補足> 前ページ式(2.22)の導出
( )
+ − −
=
−
=
−
= 22 22
dt x yd dt dx dt dy dt
y xd dt dy dt m dx dt ydx dt xdy dt m d yp dt xp
d dt dl
x y z
積の微分 =mxd y −
dt myd x dt
2 2
2 2
[問題 2.5]
はじめに静止していた物体が摩擦の無視できる斜面を滑り落ちるとき、その距離は経過し た時間tの2乗に比例する。斜面に沿って下向きにx方向をとり、物体の質量をmとする とき、物体の運動量の大きさを求めよ。
[例題 2.3]
ある点に関する角運動量Lの方向が不変な場合、質点の運動は一つの平面内で行われる ことを示せ。
(解答)
Lの方向を z 軸方向にとると、Lx = Ly =0, Lz ≠0となるから、式(2.20b)より ypz −zpy =0, zpx −xpz =0
この第1式にxを、第2式にyを掛け加えれば、
xyp xzp yzp xyp xzp yzp
z xp yp
z y x z
y x
y x
− + − =
− + =
− − =
0 0
0
( )
しかし、他方で Lz =(xpy −ypx)≠0としているから、最後の2式が成立するためには、
z=0、すなわち、質点はつねに平面z=0上にある。
[問題 2.6]
質量mの質点が速さvでx方向に運動している。点 O から 質点の軌道におろした垂線の長さを rp とするとき、角運 動量を求めよ。角運動量が零になるのはどのような場合か、
また、角運動量が保存される運動はどのような時か述べよ。
ただし、vは零ではないとする。
[問題 2.7]
右図の様に時刻t=0 に点 P から質量mの質点が重力加速度g を受けて初速度0で自由落下を始めたとする。点 O から見た 角運動量を求めよ。角運動量の時間変化の割合が力のモーメ ントに等しいとおいて、質点の力を求め、それがmg になる ことを示せ。
One Point 積の微分 (fg)'= f g' + fg'
m x rp
v O
x
m rp
v
O P
y
<運動量保存>
質点 1,2,...の速度をv1,v2,...とすると、式(2.13)
1 v1 + 2 v2 +...=
(
1v1+ 2v2 +...)
=F1 +F2 +...m dt m
d dt
m d dt
m d
式(2.19)運動量pi =mvi iを用いると、上式は、
(
p1+p2+...)
=F1+F2 +...dt
d (2. 26)
すなわち、
∑
=∑
i dt i
d
i
i F
p (2. 27)
ここで、質点系の全運動量を次のように定義する。
P =
∑
pi (2. 28)
上式の右辺は、式(2.14)の右辺をtで微分したものである。すなわち、
dt M d dt m d mi i i i
i
R v r
p =
∑
=∑
=∑
よって、
dt M dR
P = (2. 29)
式(2.28),(2.29)を式(2.27)に代入すると、
= =
∑
i
dt i
M d dt
dP R F
2 2
(2. 30)
が得られる。
以上より、
法則[2.2] 運動量の法則
(i)質点系の全運動量P は、重心に全質量が集中したと考えた時の質点の運動量 t
M ⋅dR /d に等しい。
dt M dR
P =
(ii)質点系の全運動量の時間的変化の割合dP /dtは、外力の総和
∑
i
Fiに等しく、内 力には無関係である。
= =
∑
i
dt i
M d dt
dP R F
2 2
(iii)もし外力が働いていないか、その総和が零ならば、質点系の全運動量P は一定 に保たれる。これを、運動量の保存則という。
<衝突>
衝突とは、2つの物体(粒子)が互いに近づいて力をおよぼし合い、最初に持っていた運 動量やエネルギーを変化させることをいう。
一般に、地上のマクロな物体の場合、相互の万有引力は無視できるので、両物体が接触したと きに生じる力は抗力であり、物体が固体である時には撃力(瞬間的に作用する大きな力)になる。
撃力では力が時間とともにどのように変化する か は 測 定 し に く い 。 こ の と き 運 動 方 程 式
F v / )= (d dt
m (F は撃力)を時間tで積分して得ら れる。
∫
12 = ( 2)− (1)=∫
t1t2 tt dt m t m t dt
dt
m dv v v F
あるいは、式(2.19)p =mvより、
p(t2)−p(t1)=
∫
t1t2Fdt (2. 31)
式(2.31)は
質点の運動量の増加量は、その間に働いた力の力積に等しい
ことを意味している。撃力では力F そのものは求めにくいが、力積は運動量の変化によ って知ることができる。
<弾性衝突と非弾性衝突>
ボールが速さv で飛んできて、静止した壁に垂直にあたり、速さv' ではねかえったと する。衝突前後の速さの比
e=v'/v
をはねかえりの係数(coefficient of rebound)、あるいは反発係数という。
もしv'>vならば運動エネルギーが増加してしまうので、v'≤vでなければならないから、
0≤ ≤e 1
eの値により、以下の様に分類される。
① e=1 完全弾性衝突(perfectly elastic collision)
衝突前と衝突後で運動エネルギーが変化しない衝突。このとき、I =2mv
②0< <e 1 非弾性衝突
衝突前後で運動エネルギーが変化し、はねかえる衝突
③e=0 完全非弾性衝突
粘土製のボールなどの場合であり、壁にあたって止まってしまう衝突。I =mv 普通の場合、運動エネルギーは減少するので、非弾性衝突である。
t Fx
t1 t2
面積=
=(力積のx成分)
∫
tt12Fxdt図 2‑6 撃力と力積
定義[2.4] 力積
上式の右辺の量
∫
t1t2Fdt (∫
F dtx ,∫
F dty ,∫
F dtz を成分とするベクトル)を力F のt1からt2 までの間の力積とよぶ。[例題 2.4]
自由落体について力積が運動量の変化に等しいことを確かめよ。
(解答)
落体は一定の加速度gで落下する。鉛直下方にx軸をとり速度をv と すれば、
g dt dv =
上式をtoからtまで積分すれば、
) ( ) ( ) (
] [ ] [
0
0 0
0 0
t t g t t
t g
dt g d
gdt d
o t t t
t
t t t
t
−
=
−
=
=
=
∫
∫
v v
v v v
従って、運動量の変化は
mv(t)−mv(to)=mg(t−t0) ①
一方、落体の質量をmとすると、一定の加速度で運動しているから、この物体に働い ている重力の大きさは
F =mg
であるので、力積は、
( 0)
0 0
t t mg dt mg
Fdt t
t t
t =
∫
= −∫
②式①、②より、力積が運動量の変化に等しいことがわかる。
[問題 2.8]
静止した質量 M の物体に、質量 m の物体が速度 v0で衝突して合体した。合体後の速度、
運動エネルギー、失われた運動エネルギーを求めよ。ただし、運動は一つの直線上で行 われるものとする。
[問題 2.9]
質量mの物体が右図のように角度θで壁に衝突する。衝突の前後で 速さは変わらずv であるとするとき、壁と平行方向および垂直方向 の速度の変化を求め、壁が受ける力積を計算せよ。また、力積が 最大になる角度はいくらか。
[問題 2.10]
同一直線上を速度v1,v2(v1 >v2)で運動している質点m1, m2の 2つの物体が衝突して一体となった。合体後の速度を求めよ。
その速度は衝突前のどのような速度に相当するか。衝突した後 静止するには、速度の比v2/v1がいくつであればよいか。ただ し、v1 >0とする。
m
加速度 g
v
v θ
θ
m1
v
1m2
v
22.4 重心運動と相対運動
前節において質点系の運動では重心が重要な役割をしていることを説明したので、重心 からみた各質点の運動を考える。
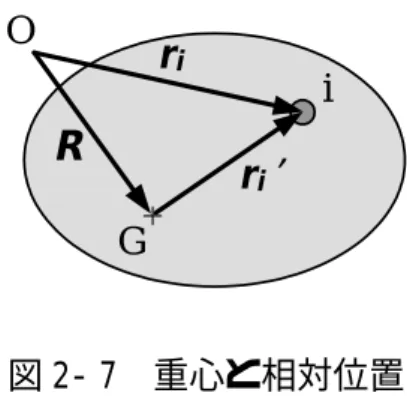
次ページ図に示すように、座標原点をOとし、重心Gの位置をR =OG、i 番めの質点の 位置をriとする。
Gからみたi の位置をri'とすると、質点の位置riは、
ri =R +ri' (2. 32)
成分ごとに示すと、
x X x
y Y y
z Z z
i i
i i
i i
= +
= +
= + ' ' '
式(2.32)を時間tで微分すると、次式を得る。
dt d dt d dt
dri = R + ri'
vi =V +vi' (2. 33) ここで、vi'は重心Gからみた質点i の相対速度である。
式(2.32)にmiを掛けて、i について加え合わせると、次式を得る。
∑
miri =∑
miR +∑
miri' (2. 34)
mi M
∑ = とすると、上式の右辺第1項は、
∑
miR =MRに等しく、さらに、2.2 節の式(2.10)重心の定義により、
MR =
∑
miriとなるので、式(2.34)は以下のようになる。
∑
miri =∑
miri+∑
miri'
∑
miri'=0 (2. 35)上式を時間tで微分すると、以下のようになる。
' 0
∑
mi ddtri =
∑
mvi i'=0 (2. 36)(つづく)
G O
ri
i R
ri
図 2- 7 重心と相対位置
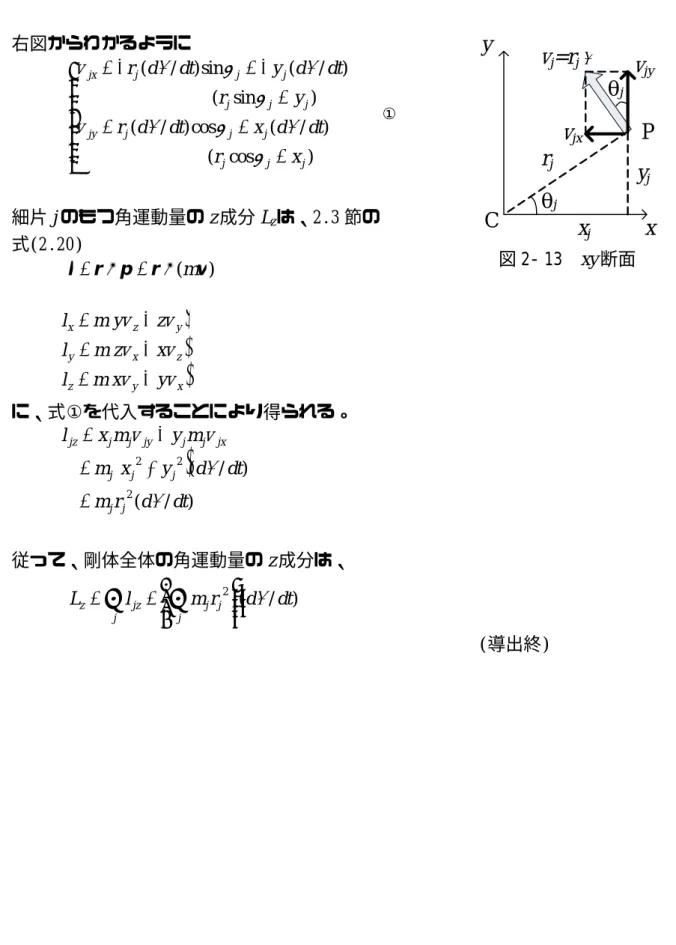
前ページ式(2.33)を成分ごとに示すと、
vix =Vx +vix', viy =Vy +viy', viz =Vz +viz' したがって、運動エネルギーmvi i2 /2は、
( )
( )
( )
2 2 22
2 2 2
2
2 2 2
2
2 ' ' 1 2
' 1 2
1 2
1
2 ' ' 1 2
' 1 2
1 2
1
2 ' ' 1 2
' 1 2
1 2
1
iz i z iz i z i iz
z iz
i
iy i y iy i y i iy
y iy
i
ix i x ix i x i ix
x ix
i
m V
m V m V
m m
m V
m V m V
m m
m V
m V m V
m m
v v
v v
v v
v v
v v
v v
+ +
= +
=
+ +
= +
=
+ +
= +
=
上式をi について合計して、前ページ式(2.36)を用いると、上式の右辺第2項の和は消 えて、
∑
∑
∑
∑
∑
∑
+
=
+
=
+
=
2 2 2
2 2 2
2 2 2
2 ' 1 2
1 2
1
2 ' 1 2
1 2
1
2 ' 1 2
1 2
1
iz i z
iz i
iy i y
iy i
ix i x
ix i
m MV
m
m MV
m
m MV
m
v v
v v
v v
上式を加え合わせると、
マクロの物体は原子で構成されており、我々が見て静止しているときでも、
原子は細かい複雑な運動をしている。これが熱運動とよばれるものである。
衝突とか摩擦で力学的エネルギーの一部が失われるように見えるのは、この ような内部運動の運動エネルギーや位置エネルギーに転化するためである。
質点系の運動エネルギー
∑ (
2 + 2 + 2)
=(
2 + 2 + 2)
+∑ (
'2+ '2+ '2)
2 1 2
1 2
1
iz iy ix i z
y x iz
iy ix
i MV V V m
m v v v v v v
∑
21mivi2 =12MV2 +∑
21mivi'2 (2. 37)質点系の 重心運動の 相対運動の 運動エネ 運動エネ 運動エネ ルギー ルギー ルギー
従って、上式は次のことを表している。
質点系の運動エネルギーは、重心運動の運動エネルギーと、それに対する 相対運動の運動エネルギーの和に等しい
式(2.36)
[例題 2. 5]
質量の等しい3つの質点 1,2,3 が、xy平面上の3点(2,0)、
(‑2,0)、(0,3)から速度 1 でそれぞれ、x方向、−x方向、y方 向に動き出したとする。
このとき、各質点の質量をmとして、重心の相対的な運動 エネルギーを求めよ。
(解答)
[問題 2. 11]
質量m1とm2の2個の質点 P と Q が速度v1,v2でx軸上を運動している。これらの質点 を速度v でx軸上を動く座標から観察すると、速度はv1-v,v2-v にみえる。このことは、
系の運動エネルギーが観測する座標に依存することを示している。
(1)運動エネルギーを最小にする座標は、静止座標に対して重心の速度
2 1
2 2 1 1
m m
m m
G +
= v + v
v
で動く座標になることを示し、その座標における全運動エネルギーK'は、
(
1 2)
22
'=1µv −v
K
に等しいことを示せ。ここで、µは換算質量を表す。
(2)運動エネルギーK'は、重心に相対的な運動エネルギーに一致することを示せ。
x y
O 1 (2,0) 2
(-2,0)
3 (0,3)
2.5 質点系の角運動量
<角運動量の保存則>
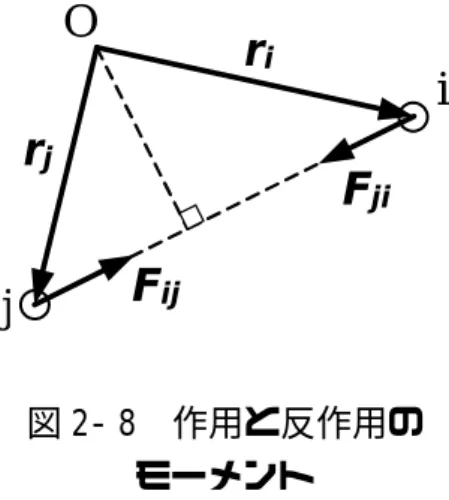
次ページ図に示すように、外力を受けて、互いに内力をおよぼし合っている質点系の角 運動量を考える。
2.3 節の式(2.25)dl/dt =Nより、角運動量liの時間変化はこの質点に働く力のモーメン ト(の総和)(式(2.12) N =r×F)に等しいので、
...
...
...
...
...
...
...
...
...
23 3 13 3 3 3 3
32 2 12 2 2 2 2
31 1 21 1 1 1 1
+
× +
× +
×
=
+
× +
× +
×
=
+
× +
× +
×
=
F r F r F r
F r F r F r
F r F r F r
dt d
dt d
dt d
l l l
(2. 38)
上式を合計すると、2.1 節の”運動の第3法則”Fij =−Fjiより、外力のモーメントの和ri×Fi だけが残る。よって、質点系の(全)角運動量を
= + + + =
∑
i
li
l l
l1 2 3 ...
L (2. 39)
とすると、
外力が作用していないか、あるいは、作用してもそのモーメントの和が零の場合、
=0 dt
dL
となり、上式を時間tで積分すると、
i i
dt i
dL =r1×F1+r2×F2 +r3×F3+...=
∑
r ×F (2. 40)従って、次のことがわかる。
質点系の(全)角運動量の時間的変化の割合は、その系に働く外力のモーメント の総和に等しい
法則[2.3] 角運動量の保存則 L=C (C:積分定数)
となり、Lは一定に保たれる。
これが質点系の場合の角運動量の保存則である。
O
F
jir
ii
j r
jF
ij
図 2- 8 作用と反作用の モーメント
<重心運動と相対運動>
これまでに説明してきた角運動量(運動量のモーメント)や力のモーメントは、全て固定 した原点に関するものであったが、運動は重心の運動と重心に関する相対的な運動とに 分けられることを前節で示した。
よって、角運動量に関しても、質点系が全体として動きながら(重心運動)、重心のまわ りで行う回転について説明する。
[例題2. 6 地球の運動]
質点系として、地球の運動を考える。ここでは地球の自転に関する運動を取り扱う。こ の場合、重心は固定していないから、原点を重心に移すわけにはいかない。
重心の位置をR 、重心に関する質点iの相対的な位置を R
r
ri'= i − (右図)とすると、角運動量Lは次のようにな る (導出は次ページ参照)。
L=
∑
ri×mivi=LG +L' ① ただし、
LG =R×MV, L'=
∑
miri'×vi' (2. 41)
地球の例でいえばLGは地球の重心の公転の角運動量、
L'は重心のまわりの自転の角運動量である。
式(2.41)LG =R×MV を時間 t で微分し、重心についてM⋅dV/dt =
∑
Fi (2.2 節の式(2.11))を用いると、
dt M d dt
d G V
L R
×
= i
i
i R F
F
R× = ×
=
∑ ∑
(2. 42)
式(2.40) i i i
dt
dL/ =
∑
r ×F でL=LG+L'、ri =R +ri'とおいて、上式を用いると、(導出は 次ページ参照)i i
dt i
dL'=
∑
r '×F (2. 43)が得られる。右辺は重心に関する外力のモーメントの和である。これを i
i
i F
r
N'=
∑
'× と する。0 '=
N の場合、
L'=C
(
C:積分定数)
すなわち、重心まわりの角運動量L'は一定に保たれる。
G O
ri
i R
ri
図 2- 9 重心と相対位置
[式①の導出]
( ) ( )
( ) (
') (
') (
' ')
' '
i i i i
i i
i i
i i i
i i i
m m
m m
m m
v r v
R V r V
R
V v R
r v
r L
× +
× +
× +
×
=
+
× +
=
×
=
∑
∑
∑
∑ ∑
∑
2.4節の式(2.35)
∑
miri'=0、式(2.36)∑
mivi'=0より上式の右辺第2、第3項は消えるので、L=LG +L'
[式(2.43)の導出]
式(2.40) i i i
dt
dL/ =
∑
r ×F でL=LG+L'、ri =R +ri'とおいて、
(
i)
ii i
dt i d dt d
dt i d
F r L R
L
F L r
G + = + ×
×
=
∑
∑
' '
上式に式(2.42)を用いると、
L R F r F F
R× + =
∑
× +∑
×∑
dt i i di i i i
' '
i i
dt i
dL r F
×
=
∑
''
[問題 2. 12]
2a だけ離れた2本の平行線の上を2人のスケーターが互いに速度vで近づき、真横に来 たときに手を握り合って回転を始めた。角運動量の保存則を用いて、回転の角速度ωを 求めよ。ただし、2人とも質量mの質点とみなす。
Coffee Break 潮汐と地球の自転
地球の自転は少しずつ遅くなり、1日は前日に比べ1億分の2秒ずつ長くなっている。そのため、1世 紀の間には 14 秒も差ができるが、これは月や惑星、太陽の運動のみかけの遅れとして観測されている。
地球の自転が遅れるのは、主に海水の満ち引きが自転にブレーキをかけるためである。海水は月に引かれ ていくらか移動するが、月は地球のまわりを約1ヶ月で回るのに対して、地球の自転周期は1日でありず っと速いので、潮汐がブレーキになる。潮汐が絶えず行っているブレーキの仕事は約20億馬力に相当す ると推定されている。この潮汐摩擦の反作用として、地球を回る月の公転運動はエネルギーが与えられ、
その結果、月は1ヶ月に 8mm ずつ地球から遠ざかる。この割合で月が今でも遠ざかっているものとすると 40億年の昔には地球と月とは極めて接近していたことになる。
地球と月とは密接に作用し合っているから、これらをまとめて1つの体系と考えると、その重心のまわ りの角運動量は保存されるはずである。しかし、潮汐により地球の自転は遅くなり、そのため地球の自転 の角運動量は減少する。月の角運動量は、月の自転による角運動量と月が地球を回る軌道運動の角運動量 とからなるが、月の自転の角運動量は小さいので、地球の自転が遅くなるだけ、月の軌道運動が増加する はずである。月の軌道半径をr、速さをv、質量をmとすると、月の軌道運動の角運動量はL =mvrと
なる。地球の質量をMとすると、地球の引力が月の遠心力と釣り合うため、
GMm r/ 2 =mv2 /r これから
v2 =GM r/ = L2 / (mr)2 従って、
r= L2 / (GMm2)
となる。従って、地球の自転が遅くなるにつれて月の角運動量Lは増加し、このため地球と月の間の距 離rは次第に増大することになる。
2.6 剛体とそのつり合い
<剛体とは>
実在の固体には鉄や石などのように硬い物体もあれば、ゴムのように軟らかい物体もあ るが、いずれにしても多少は変形する。
これを理想化して
次ページ図に示すように、剛体は無数の質点から構成されていると考えられるが、剛体 中のどの2つの質点をとってもその距離が変わらないものである。従って、剛体は質点 系の特別な場合である。
<剛体に働く力>
剛体は質点系の特別な場合であるので、今までに得られた質点系の一般的な性質(内力に は無関係等)は剛体に対してもそのまま適用できる。
剛体の運動として、
①全体としての移動である並進運動
②回転運動 を考えればよい。
この場合、重力は剛体の重心に働き、その大きさはMg (M:剛体の全質量)である。
剛体の力を保っているのは各部分の間に働く内力であるが、これは全く考えなくてよい。
よって、剛体に働く力を Fn
F
F1, 2, ..., :重心に働く重力を含めた外力 rn
r
r1, 2, ..., :外力が作用する点 とする。
前節までは、Fiやriの添え字iは質点の番号であるとしたが、ここでは添え字iを力の番 号とする。
これは剛体を細かく分けてその細片を質点とみなし、i番目の力が作用しているところに ある細片に番号iをつけ、力がF1, F2, ...,Fnまでのn個につけてあると思えばよい。
このように考えれば、前節までに得られた諸式はそのまま剛体に使える。
定義[2.5] 剛体
全く変形しない物体を仮定し、これを剛体とよぶ。
剛体
図 2- 10 剛体中の質点
重心
G原点O
F1 (=G ) r2
2 3
r1
r3
F2
F3
剛体
図 2- 11 剛体に働く外力
<剛体のつり合い>
ここでは、剛体の釣り合い条件、すなわち、平衡条件について考える。
質点系の運動方程式(2.2 節の式(2.11)) =
∑
i
dt i
M d R F
2 2
において、剛体がつり合っている場合、それは静止しているので、当然、重心も静止し 続け、すなわち、d2R/dt2 =0なので、
∑
=i
i 0
F (2. 44)
が成り立つ。
次に、たとえ重心が静止していても、そのまわりで回転している場合、剛体が静止して いるとはいえないので、重心まわりの自転の角運動量L'は
L'=0
でなければならない。
質点系の全角運動量Lは、重心の公転に関する角運動量LGと重心まわりの自転の角運動 量L'の和
L=LG +L' で表わされる。
この場合、重心が止まっている(LG =0)ので、L=LG +L'=0であるから、
=0 dt
dL ①
従って、角運動量に関する方程式(式(2.40)) =
∑
×i dt
dL/ ri F