混雑空港における到着管 理に関する研究
平成 29 年 9 月
九州大学大学院 工学府
航空宇宙工学専攻 博士後期課程
田村 恵一
目次
第 1 章 序論 ______________________________ 1
第 1 節 背景 ... 1
第 2 節 目的 ... 7
第 3 節 構成ならびに単位 ... 8
第 2 章 混雑空港の現状解析 _________________ 10 第 1 節 はじめに ... 10
第 2 節 東京国際空港の概要 ... 10
第 3 節 レーダーベクターの現状解析 ... 13
第 4 節 まとめ... 19
第 3 章 解析ツール ________________________ 20 第 1 節 はじめに ... 20
第 2 節 飛行状態推定 ... 21
第 1 項 位置情報 ... 21
第 2 項 エアデータの推定 ... 22
第 3 節 軌道最適化モデル ... 26
第 1 項 数学的モデルの定式化 ... 26
第 2 項 動的計画法 ... 28
第 4 節 まとめ ... 31
第 4 章 BADA モデルの精度 ________________ 32 第 1 節 はじめに ... 32
第 2 節 BADA モデル ... 33
第 3 節 飛行データ ... 34
第 4 節 燃料流量の計算 ... 35
第 1 項 推力 ... 35
第 2 項 大気モデル ... 35
第 4 項 BADA 燃料流量モデル ... 36
第 5 節 BADA モデルの精度の直接評価 ... 37
第 1 項 燃料流量の比較 ... 37
第 2 項 燃料消費量および燃料流量誤差の解析 ... 39
第 6 節 飛行状態推定と飛行データの比較 ... 45
第 7 節 最適軌道と飛行データの比較 ... 53
第 8 節 まとめ ... 65
第 5 章 飛行管理装置を用いた到着時刻制御 ____ 66 第 1 節 はじめに ... 66
第 2 節 飛行管理装置( FMS ) ... 67
第 3 節 RTA 機能の検証 ... 68
第 1 項 RTA 機能 ... 68
第 2 項 FMS シミュレータ試験の概要 ... 69
第 4 節 FMS が生成する飛行軌道のモデル化 ... 76
第 1 項 概要 ... 76
第 2 項 Three Parameter Model ( TPM ) ... 77
第 3 項 シミュレータデータとの比較 ... 77
第 5 節 まとめ ... 80
第 6 章 現在の到着機制御における潜在便益 ____ 81 第 1 節 はじめに ... 81
第 2 節 航空機データと管制方式 ... 83
第 1 項 航空機データ ... 83
第 2 項 レーダーベクター ... 84
第 3 項 Holding (待機) ... 84
第 3 節 干渉評価方法 ... 85
第 4 節 燃料消費量の比較 ... 86
第 1 項 各速度での燃料消費量の比較 ... 86
第 2 項 全機の燃料消費量の比較 ... 87
第 5 節 干渉の評価 ... 90
第 6 節 干渉解消後の燃料消費量 ... 90
第 7 節 まとめ ... 94
第 7 章 4 次元軌道運用による便益 ___________ 95 第 1 節 はじめに ... 95
第 2 節 軌道最適化による到着時刻の推定 ... 95
第 3 節 東京国際空港での検証 ... 97
第 4 節 まとめ... 102
第 8 章 結論 ____________________________ 103 Appendix A. 管制方式基準 _______________ 106 第 1 節 はじめに ... 106
第 2 節 管制間隔 ... 106
第 1 項 管制間隔 ... 106
第 2 項 レーダー間隔 ... 108
第 3 項 後方乱気流管制方式 ... 109
Appendix B. 騒音軽減方式 _______________ 112 第 1 節 はじめに ... 112
第 2 節 ICAO および日本の騒音軽減方式 ... 112
第 3 節 東京国際空港の騒音軽減方式 ... 113
第 1 項 Preferential Runway ... 113
第 2 項 Preferential Routes and Aircraft Operating Procedures for Noise Abatement ... 114
第 3 項 Noise Abatement Approach Procedure (NAAP) ... 117
謝辞 ___________________________________ 119
参考文献 ________________________________ 120
図一覧
図 1-1 国際交通量の需要予測( CARATS より) ... 2
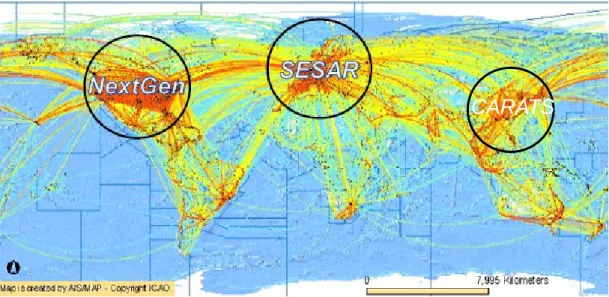
図 1-2 将来の航空交通システムに係る長期計画の国際的動向 ... 3
図 2-1 東京国際空港平面図 ... 11
図 2-2 34L における計器進入方式および STAR (通常) ... 12
図 2-3 34L における計器進入方式および STAR (天気良好) ... 12
図 2-4 22 における計器進入方式および STAR ... 13
図 2-5 到着機の軌跡と同心円 ... 15
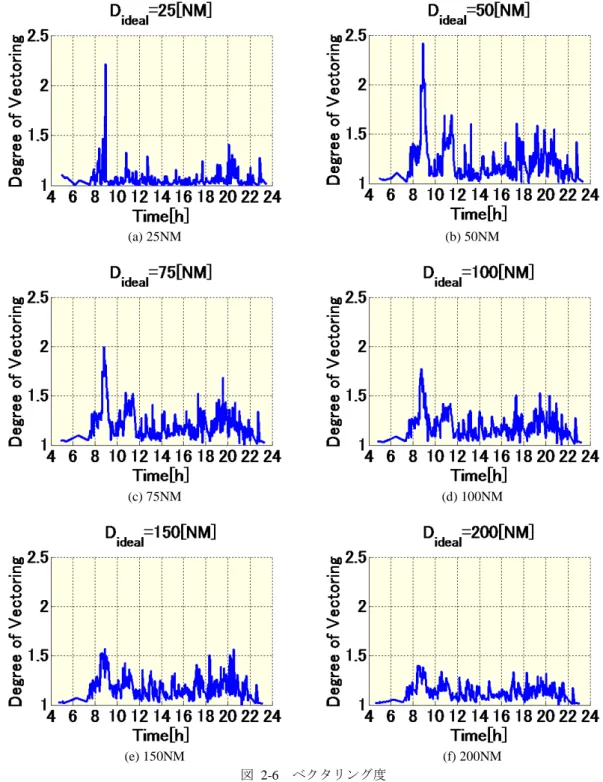
図 2-6 ベクタリング度 ... 16
図 2-7 150NM を通過した時刻の間隔( 17 日間) ... 17
図 2-8 合流点からの距離と時刻の関係 ... 17
図 2-9 実際の飛行時間( 2012/5/9 ) ... 18
図 3-1 飛行状態推定と軌道最適化の概念図 ... 21
図 3-2 機体および風の速度方向と角度の関係 ... 27
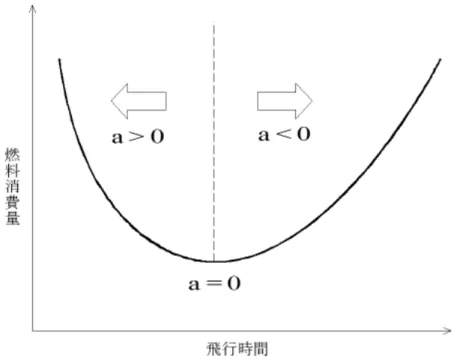
図 3-3 飛行時間と燃料消費量の関係 ... 29
図 3-4 ダウンレンジ角とクロスレンジ角の定義 ... 30
図 3-5 動的計画法の格子 ... 30
図 4-1 燃料流量 ① ... 37
図 4-2 燃料流量 ② ... 37
図 4-3 燃料流量 ③ ... 38
図 4-4 燃料流量 ④ ... 38
図 4-5 燃料流量 ⑤ ... 38
図 4-6 燃料流量 ⑥ ... 38
図 4-7 燃料流量 ⑦ ... 38
図 4-8 燃料消費量 ① ... 40
図 4-9 燃料消費量 ② ... 40
図 4-10 燃料消費量 ③ ... 40
図 4-11 燃料消費量 ④ ... 40
図 4-12 燃料消費量 ⑤ ... 40
図 4-13 燃料消費量 ⑥ ... 40
図 4-14 燃料消費量 ⑦ ... 41
図 4-15 燃料流量誤差(全飛行フェーズ) ... 41
図 4-16 燃料流量誤差(上昇) ... 41
図 4-17 燃料流量誤差(巡航) ... 41
図 4-18 燃料流量誤差(降下) ... 41
図 4-19 積算燃料消費量と Configuration(CI20) ① ... 43
図 4-20 積算燃料消費量と Configuration(CI20) ② ... 43
図 4-21 積算燃料消費量と Configuration(CI40) ③ ... 43
図 4-22 積算燃料消費量と Configuration(CI40) ④ ... 43
図 4-23 積算燃料消費量と Configuration(CI80) ⑤ ... 44
図 4-24 積算燃料消費量と Configuration(CI80) ⑥ ... 44
図 4-25 積算燃料消費量と Configuration(CI80) ⑦ ... 44
図 4-26 飛行状態推定結果 (CI20) ① ... 46
図 4-27 飛行状態推定結果 (CI20) ② ... 47
図 4-28 飛行状態推定結果 (CI40) ③ ... 48
図 4-29 飛行状態推定結果 (CI40) ④ ... 49
図 4-30 飛行状態推定結果 (CI80) ⑤ ... 50
図 4-31 飛行状態推定結果 (CI80) ⑥ ... 51
図 4-32 飛行状態推定結果 (CI80) ⑦ ... 52
図 4-33 巡航性能( ISA ,無風条件) ... 53
図 4-34 CAS および Mach 数の比較 CI20 ① ... 55
図 4-35 CAS および Mach 数の比較 CI40 ③ ... 55
図 4-36 CAS および Mach 数の比較 CI80 ⑤ ... 56
図 4-37 CAS および Mach 数の比較 CI80 ⑦ ... 56
図 4-38 CAS および Mach 数の比較 CI20 ② ... 57
図 4-39 CAS および Mach 数の比較 CI40 ④ ... 57
図 4-40 CAS および Mach 数の比較 CI80 ⑥ ... 58
図 4-41 高度の比較と降下経路角 CI20 ① ... 58
図 4-42 高度の比較と降下経路角 CI40 ③ ... 59
図 4-43 高度の比較と降下経路角 CI80 ⑤ ... 59
図 4-44 高度の比較と降下経路角 CI80 ⑦ ... 60
図 4-45 高度の比較と降下経路角 CI20 ② ... 60
図 4-46 高度の比較と降下経路角 CI40 ④ ... 61
図 4-47 高度の比較と降下経路角 CI80 ⑥ ... 61
図 4-48 最適軌道 CI20 ① ... 62
図 4-49 最適軌道 CI20 ② ... 62
図 4-50 最適軌道 CI40 ③ ... 63
図 4-51 最適軌道 CI40 ④ ... 63
図 4-52 最適軌道 CI80 ⑤ ... 63
図 4-53 最適軌道 CI80 ⑥ ... 63
図 4-54 最適軌道 CI80 ⑦ ... 63
図 5-1 Legacy Control Dead Band ... 69
図 5-2 B737 FMW の概観(電子航法研究所所有) ... 70
図 5-3 福岡空港から東京国際空港への経路 ... 70
図 5-4 CI25 の飛行に対する ETA の差 ... 71
図 5-5 機外大気設定における偏西風の入力値 ... 72
図 5-6 風誤差を含んだ時の RTA 機能が制御した飛行データ ... 73
図 5-7 速度と ETA の時間履歴 (Case1-1) ... 75
図 5-8 速度と ETA の時間履歴 (Case1-2) ... 75
図 5-9 速度と ETA の時間履歴 (Case2-1 ,降下区間のみ ) ... 75
図 5-10 速度と ETA の時間履歴 (Case2-3 ,降下区間のみ ) ... 75
図 5-11 Three Parameter Model の軌道モデル ... 76
図 5-12 FMW と DP , 3-Param. の最適結果の比較 ... 79
図 5-13 燃料消費量と飛行時間の関係 ... 79
図 6-1 レーダーベクターの軌跡 ( 実際 ) ... 83
図 6-2 最短距離経路と Holding の軌跡 ( 提案 ) ... 83
図 6-3 電子航法研究所 SSR モード S アンテナ ... 83
図 6-4 ADDUM に設定されている Holding pattern ... 85
図 6-5 保護領域 ... 85
図 6-6 各速度での燃料消費量 ... 87
図 6-7 SSR モード S データの航跡 ... 88
図 6-8 ADDUM 直行の航跡 ... 88
図 6-9 ADDUM での Holding 時間( ADDUM10,000ft ) ... 89
図 6-10 燃料削減率( ADDUM10,000ft ) ... 89
図 6-11 干渉発生場所( ADDUM 10,000ft ) ... 90
図 6-12 干渉指標( ADDUM 10,000ft ) ... 90
図 6-13 干渉指標(干渉解消) ... 92
図 6-14 干渉発生高度 ... 92
図 6-15 干渉発生場所 ... 92
図 6-16 Holding 時間(干渉解消) ... 93
図 6-17 燃料削減率(干渉解消) ... 93
図 7-1 評価関数と燃料消費量,飛行時間の関係 ... 96
図 7-2 軌道(飛行データ) ... 99
図 7-3 到着時間間隔(飛行データ) ... 99
図 7-4 軌道(到着時刻指定なし) ... 99
図 7-5 到着時間間隔(到着時刻指定なし) ... 99
図 7-6 軌跡(到着時刻指定あり) ... 99
図 7-7 到着時間間隔(到着時刻指定あり) ... 99
図 7-8 軌道最適化による潜在便益 ... 100
図 7-9 ある 1 時間での時間履歴 ... 100
図 7-10 予定到着時刻と指定到着時刻の差 ... 101
図 7-11 予定到着時刻と指定到着時刻の差(ヒストグラム) ... 101
図 A-1 後方乱気流適用経路 1 ... 111
図 A-2 後方乱気流適用経路 2 ... 111
図 B-1 東京国際空港 Preferential Route ... 118
表一覧
表 2-1 CARATS Open data の概要 ... 13
表 2-2 飛行時間の平均値及び標準偏差 ... 18
表 3-1 数値予報 GPV データの概要 ... 22
表 4-1 解析に使用した飛行データ ... 34
表 4-2 推定燃料消費量の飛行データからの差 (CI20,40) ... 42
表 4-3 推定燃料消費量の飛行データからの差 (CI80) ... 42
表 4-4 燃料消費量の比較 ... 53
表 4-5 飛行距離の比較 ... 64
表 4-6 飛行時間の比較 ... 64
表 4-7 燃料消費量の比較 ... 64
表 5-1 ボーイング機の Cost Index 入力可能値 ... 68
表 5-2 FMS に入力した風 ... 72
表 5-3 RTA の制御結果 ... 74
表 5-4 風の設定と RTA の誤差 ... 74
表 5-5 計算条件 ... 78
表 5-6 動的計画法における変数 ... 78
表 6-1 SSR モード S データの概要 ... 84
表 6-2 最低調整速度 ... 84
表 6-3 Holding 時間( ADDUM10,000ft ) ... 89
表 6-4 燃料消費量( ADDUM10,000ft ) ... 89
表 6-5 干渉発生件数( ADDUM 10,000ft ) ... 90
表 6-6 ADDUM で設定した高度 ... 92
表 6-7 発生した干渉 ... 92
表 6-8 Holding 時間(干渉解消) ... 93
表 6-9 燃料消費量(干渉解消) ... 93
表 7-1 燃料消費量と飛行時間の平均値 ... 100
表 A-1 後方乱気流適用間隔 ... 110
表 A-2 レーダー管制下の後方乱気流間隔 ... 111
記号の説明
𝐶𝐶
𝐷𝐷: 抗力係数 𝐶𝐶
𝐷𝐷0: 有害抗力係数 𝐶𝐶
𝐷𝐷2: 誘導抗力係数
𝐶𝐶
𝑓𝑓1: 第 1 推力比燃料流量係数 [kg/(min ・ KN)]
𝐶𝐶
𝑓𝑓2: 第 2 推力比燃料流量係数 [kt]
𝐶𝐶
𝑓𝑓3: 第 1 降下燃料流量係数 [kg/min]
𝐶𝐶
𝑓𝑓4: 第 2 降下燃料流量係数 [ft]
𝐶𝐶
𝑓𝑓𝑓𝑓: 巡航燃料流量補正係数 𝐶𝐶
𝑓𝑓𝑓𝑓𝑓𝑓𝑓𝑓: Fuel cost [$]
𝐶𝐶
𝐿𝐿: 揚力係数
𝐶𝐶
𝑇𝑇𝑓𝑓,1: 第 1 最大上昇推力係数 [N]
𝐶𝐶
𝑇𝑇𝑓𝑓,2: 第 2 最大上昇推力係数 [ft]
𝐶𝐶
𝑇𝑇𝑓𝑓,3: 第 3 最大上昇推力係数 [1/ft
2]
𝐶𝐶
𝑇𝑇𝑇𝑇𝑓𝑓𝑇𝑇: 降下推力係数
𝐶𝐶
𝑡𝑡𝑡𝑡𝑡𝑡𝑓𝑓: Time cost [$]
D : 抵抗 [N]
F : 推力 [N]
FC : 燃料消費量 [kg]
H : 気圧高度 [m]
𝐼𝐼
𝑇𝑇𝑠𝑠𝑠𝑠: 間隔指標
J : 評価関数 L : 揚力 [N]
M : Mach 数
M
MO: 運用限界 Mach 数 𝑃𝑃
𝑓𝑓: 最適軌道の終点 𝑃𝑃
𝑜𝑜: 最適軌道の始点
𝑄𝑄 : 大円の直交点 R : 気体定数 [J/kg ・ K]
S : 翼面積 [m
2] T : 気温 [K]
V : 速度 [m/s
2] 𝑉𝑉
𝐸𝐸𝐸𝐸: 慣性速度 [m/s
2] 𝑉𝑉
𝐺𝐺𝐸𝐸: 対地速度 [m/s
2] V
TAS: 真対気速度 [m/s
2] V
win: 風速 [m/s
2]
W : 風
b : 気温減率 [K/km]
d : 水平面相対距離 [m]
𝑓𝑓 : 燃料流量 [kg/s]
𝑔𝑔 : 重力加速度 [m/s
2] h : 幾何学的高度 [m]
hp : ジオポテンシャル高度 [m]
m : 機体質量 [kg]
p : 気圧 [hPa]
𝑟𝑟
0: 地球半径 [m]
𝛾𝛾 : 飛行経路角 𝜂𝜂 : クロスレンジ角
𝜂𝜂
𝑓𝑓: 推力比燃料流量係数 [kg/(min ・ KN)]
𝜃𝜃 : 経度
κ : 比熱比
ρ : 空気密度 [kg/m
3] 𝜉𝜉 : ダウンレンジ角
𝜙𝜙 : 緯度
𝜓𝜓 : トラック角
𝜓𝜓
𝑇𝑇𝑠𝑠𝑠𝑠: 2 点間をなす角
添え字の説明 0 : 平均海面
𝑎𝑎 : 対気 cr : 巡航 f : 終端 i : 初期 nom : ノミナル
s : 機首方向
t : 標準大気状態での高度 11km における値 x : x 軸方向
y : y 軸方向 H : 水平
V : 垂直
略語の説明
A-CDM : Airport-Collaborative Decision Making ADS : Automatic Dependent Surveillance
自動位置情報伝送・監視機能
ADS-B : Automatic Dependent Surveillance - Broadcast ADS-C : Automatic Dependent Surveillance - Contract
AIM-J : Aeronautical Information Manual JAPAN AIP JAPAN : Aeronautical Information Publication JAPAN
航空路誌
AMAN : Arrival Manager
ARSR : Air Route Surveillance Radar 航空路監視レーダー
ARTCC : Air Route Traffic Control Center ARTS : Automated Radar Terminal System
ターミナルレーダー情報処理システム ASR : Airport Surveillance Radar
空港監視レーダー ATA : Actual time of Arrival
実到着時刻 ATC : Air Traffic Control ATM : Air Traffic Management
航空交通管理
BADA : Base of Aircraft Data model
CARATS : Collaborative Actions for Renovation of Air Traffic Systems CAS : Calibrated Air Speed
較正対気速度
CDU : Control Display Units
CFDT : Calculated Fix Departure Time CI : Cost Index
COSMOS : Computer Oriented Spacing and Metering Optimization System CTAS : Center-TRACON Automation System
DA : Descent Advisory DP : Dynamic Programming
動的計画法
EAT : Expected Approach Time 進入予定時刻
EDCT : Expected Departure Clearance Time EFC : Expect Further Clearance time
追加管制承認予定時刻
ETA : Estimation Time of Arrival
FAST : Final Approach Spacing Tool FIR : Flight Information Region
飛行情報区 FL : Flight Level
FMC : Flight Management Computer FMS : Flight Management System
飛行管理装置
FMW : Flight Management Workstation GPS : Global Positioning System GPV : Grid Point Value
格子点値 GS : Ground Speed
対地速度
GSM : Global Spectral Model 全球モデル
HND : 東京国際空港
HSG : 佐賀空港
IAS : Indicated Air Speed 指示対気速度
ICAO : International Civil Aviation Organization 国際民間航空機関
IFR : Instrument Flight Rules 計器飛行方式
ILS : Instrument Landing System
ISA : International Standard Atmosphere 国際標準大気
LCC : Low Cost Carrier
LDA : Localizer-Type Directional Aids LOC : Localizer
MHA : Minimum Holding Altitude 最低待機高度
MSM : Meso-Scale Model メソモデル
NAAP : Noise Abatement Approach Procedure NextGen : Next Generation Air Transportation System
ORSR : Oceanic Route Surveillance Radar 洋上航空路監視レーダー
PANS-OPS : Procedures for Air Navigation Services - Aircraft Operations QAR : Quick Access Recorder
飛行記録装置
RECAT-EU : European Wake Vortex Re-categorization RDP : Radar Data Processing
RTA : Required Time of Arrival
RVSM : Reduced Vertical Separation Minimum 短縮垂直間隔
RWY : Runway 滑走路
SID : Standard Instrument Departure 標準計器出発方式
STAR : Standard Instrument Arrival Route 標準到着経路
SAT : Static Air Temperature 静温
SCAS : Specifying CFDT for Arrival Spacing Program
フィックス離脱時刻の指定による航空交通流管理方式 SESAR : Single European Sky ATM Research
SR : Specific Range
SSR : Secondary Surveillance Rader 二次監視レーダー
SWA : Severe Weather Avoidance Plan TAS : True Air Speed
真対気速度
TMA : Traffic Management Advisory
TMC’s : TRACON traffic Management Coordinators TPM : Three Parameter Model
TOBT : Target Off Block Time
TRACON : Terminal Radar Approach Control Facilities TSAT : Target Start-Up Approval Time
UTC : Universal Time Coordinated 協定世界時
VFR : Visual Flight Rules 有視界飛行方式 VHF : Very High Frequency
VMC : Visual Meteorological Conditions 有視界気象状態
VOR : VHF Omni-directional Radio Range XMAN : Cross-border Arrival Management
4DT : 4 Dimensional Trajectory
4 次元軌道
第 1 章 序論
第 1 節 背景
近年の航空交通量は増大の一途を辿っている.ボーイングの統計 [1] によると旅客数
は 1995 年から 20 年で約 2.4 倍,便数は約 2 倍に増加している.増大する旅客数に対応
するため,かつては大型機を導入し大量輸送を実施していた.しかし,近年の燃油料高
騰ならびに空港容量の増加に伴い航空会社は需給バランスを考慮し機材を小型化かつ
多頻度に運航する傾向にある.また,旅客の要望も多頻度に運航が行われていることで
旅程が柔軟に組むことができるなど多頻度運航が求められている.日本では 1990 年代
に航空輸送業に関する規制緩和が行われた.それに伴い新規航空会社としてスカイマー
ク航空が運航を承認され, 1998 年に運航を開始した. 2012 年 Low Cost Carrier(LCC) と
呼ばれる新たなビジネスモデルを掲げるピーチアビエーションが誕生し, LCC は日本
発着の国際線においても革命を起こした.これらの事が航空交通量をさらに増加させる
要因となった.国内線は今後少子化に伴う人口減少や整備新幹線の開通により旅客数は
減少する傾向が見られる.しかし,管制取扱機数,すなわち便数は 2012 年と比較し 2030
年には 1.3 倍になると予測されている [2] .これは世界の動向と同様である.この航空会
社の経営モデルは今後も継続することが予測され,今後も運航便数は増加することが予
想される.近隣の海外に目を向けると中国がめざましい発展を遂げ, 10 数年前迄滑走
路が 1 本であった北京首都空港は滑走路が 3 本に, 1999 年に開港した上海浦東空港は
今や 4 本の滑走路を有する大空港へと成長している.韓国においても 2001 年にソウル
仁川国際空港を開港し現在滑走路 3 本で運用を行っている.また,バンコクや香港にお
いても新空港が建設され従来の空港より規模が大きくなっている.これらの空港から日
本に発着する便のみならず日本上空を通過して北米に向かう航空機が増大しており今
後も管制取扱機数は増大することが予想される.
図 1-1 国際交通量の需要予測(CARATSより)
航空機の増加に伴う様々な課題を解決するために, ICAO はグローバル ATM 運用概 念 [3] を提案している.これは航空交通の安全性,効率性,環境問題への対応等の目標 を達成するため, 将来の ATM がどのように運用されるべきかを定めたビジョンであり,
運航者の求める飛行軌道を最大限満足するため,全飛行フェーズにおいて飛行軌道の管 理等を行っていく方向性が示されている.
米国においては NextGen(Next Generation Air Transportation System)[4] というプログラ ムで研究を実施している. NextGen は「航空交通需要,環境問題等への対応だけでなく,
テロ等の脅威に対応する国家安全保障やグローバルスタンダード化の推進等のリーダ ーシップの確保という米国特有の目的を包含し,国の機関の共同組織により国家的プロ ジェクトとして推進されている 2025 年を目指した次世代の航空交通システムに関する 総合的なビジョンである.
ヨーロッパにおいては EUROCONTROL が SESAR(Single European Sky ATM Research) [5] というプログラムで研究を実施している. SESAR は「多数の国や管制機関が存在す る欧州において,単一の空( Single European Sky )を実現するため,均質的な航空管制 サービスを提供すべく 2020 年を目指した新世代の ATM システムに関する近代化プロ グラム」である.ここで EUROCONTROL とは European Organization for the Safety of Air
Navigation の略称であり,欧州航空航法安全機構と訳される. 41 カ国が加盟し Single
European Sky を実現するため 21 世紀そしてその後の Air Traffic Management に必要と
なるパフォーマンスを提供する政府間組織のことである [6] .アジア太平洋地域におい
ては我が国が CARATS(Collaborative Actions for Renovation of Air Traffic Systems)[7] を定
めて研究を実施している. 2025 年を目標に将来の航空交通システムの構築を目指して
いる.
図 1-2 将来の航空交通システムに係る長期計画の国際的動向
CARATS の中では我が国の航空交通の特徴として下記のものを挙げている.
① 運用に制約が多い首都圏の空港及び空域に航空交通が集中しており,同圏域にお ける管制処理容量の拡大が急務となっている.
② 新幹線等他の高速交通機関が発達していることなどから,定時性,速達性等の面 で航空に求められる利便性の水準が高い.
③ 山岳地帯や都市部に隣接した空港が多いため,出発進入ルートの設定に制約が多 い.さらに,広大な洋上空域や離島・山岳地域等も多く,地上の通信,航法,監 視施設の電波が届く範囲が限定される.
④ 自衛隊及び米軍の訓練空域等が多数存在しており,さらなる空域の有効活用が望 まれている.
⑤ 様々な運用環境にある多数の飛行情報区( Flight Information Region : FIR )
1と接 しており,円滑な経路設定ができていないなどシームレスな運用が十分になされ ていない.
⑥ アジア-北米間を飛行する上空通過機が多く,今後も急速な増加が見込まれてい る.
⑦ 我が国は諸外国と比べ取り扱い機数に占める大型航空機の割合が高い.(なお,
首都圏空港の容量拡大,ニーズの変化を踏まえた運航者の対応等により,この傾 向が薄れる可能性はある.)
1 飛行情報区とは国際航空交通の安全確保と効率化のために国連の国際民間航空機関(ICAO)によって設定 された空域のこと.各情報区では特定の航空交通管制機関がその空域内を飛行するすべての航空機に対 して航行に必要な情報を提供し,かつ,遭難事件が発生した場合はただちに捜索・救難活動を行うことが 義務づけられている.FIR には公海の上空のみならず各国の領空も含まれているが,その運用にあたっ ては領空に対する各国の主権よりも航空交通の円滑な運航と安全性が優先して考慮されるのが特色で,
その趣旨から情報区の名称も国名ではなく責任管制機関の所在地名がつけられている.
CARATS
これらの課題を解決するために下記の数値目標が設定されている.
項目 数値目標
安全性の向上 安全性を 5 倍に向上
航空交通量増大への対応 混雑空域における管制の処理容量を 2 倍に向上 利便性の向上 サービスレベル(定時性,就航率及び速達性)を 10%
向上
運航の効率性の向上 1 フライト当たりの燃料消費量を 10% 削減 航空保安業務の効率性の向上 航空保安業務の効率性を 50% 以上向上 環境への配慮 1 フライト当たりの CO
2排出量を 10% 削減 航空分野における我が国の国
際プレゼンスの向上
(国際会議の開催,国際協力の案件等で評価)
CARATS ではこれらの目標を達成するためには,それぞれの分野において課題や限界
が存在することを挙げている.その中で「 ATM における運用上の課題」として「空域 ベースの ATM 運用に係る課題」および「航法技術に係る課題」を挙げている.そこで
CARATS ではこれまでの「空域ベースの ATM 運用」から運航の制約を極力なくし,柔
軟で効率的な飛行を実現するとともにトータルとしての航空交通のパフォーマンスの 最適化を目指す戦略的な「軌道ベースの運用」への移行をその中核に据えた.現行は分 割された空域毎を基本とした管制指示や出発待機等による交通流制御を中心とした「空 域ベースの ATM 運用」を行っている.これに対し「軌道ベースの ATM 運用」とは我が 国の FIR の全体を一つの空域として捉え,全ての航空機の出発から到着までを一体的に 管理するとともに,全飛行フェーズにおいて時間管理を導入した 4 次元軌道( 4
Dimensional Trajectory : 4DT )に沿った ATM 運用のことである.また,運航前から戦略
的かつ協調的に軌道を調整することで,運航者が希望する飛行を柔軟に実現するととも に,混雑空港及び混雑空域における航空交通容量の拡大や CO
2排出量の削減といった 政策的課題にも的確に対応することが可能である.
CARATS の中で挙げられている「我が国の航空交通の特徴」を具体的に考えると以
下の事が挙げられる.東京国際空港においては西に米軍横田基地が存在しており,広大 な空域を使用している.また,東には成田国際空港,北には百里基地が存在しており使 用できる空域は限られている.また成田空港においては 2 本の滑走路で多数の離着陸機 を処理している.しかし,これらの個々の問題は海外の空港にも存在している.例えば サンフランシスコ国際空港は周囲を山に囲まれた湾に位置し,東にはオークランド国際 空港,南にはサンノゼ国際空港と地形による狭い空域の中で多数の離着陸機を処理して いる.また世界有数の混雑空港であるヒースロー国際空港では成田空港と同様に大規模 空港としては少ない 2 本の滑走路で離着陸機を処理している.その他の空港においても 制限空域や地形,近隣の空港との空域の輻輳で色々な制約がある中で運航している.
著者は 1999 年全日本空輸株式会社においてボーイング 767 型機副操縦士として日本
の空を飛び出した. 2004 年からはボーイング 777 型機において国内のみならずニュー
ヨーク:JFK 国際空港,ロサンジェルス国際空港,サンフランシスコ国際空港,ロンド
ン:ヒースロー国際空港等,欧米の混雑空港を機長として乗務をした. 2014 年からは 乗務機種をボーイング 787 型機に変えシンガポール:チャンギ国際空港,香港国際空港,
シドニー:キングスフォード国際空港,北京首都空港,上海:浦東国際空港,ソウル:
仁川国際空港等,アジア,オセアニアの混雑空港に乗務した.現場での経験の中で国内 の管制に目を向けると,管制間隔を確保することが第一義であるが交通量が増大した現 在では全体としての効率,すなわち,全体的に遅延や燃料消費量の増加といった運航の 効率が低下していると感じられる.
効率的な管制を実施するため管制の自動化も行われている.米国では 1990 年代より
CTAS(Center-TRACON Automation System) と呼ばれる管制の自動化が進められている.
CTAS は Planning と Control の 2 つのカテゴリーに分けられる. Planning では航空路管制の
ための Traffic Management Advisory(TMA) と進入管制のための TRACON traffic
Management Coordinators(TMC’s) が開発されている.また, Control では航空路管制のた
めの Descent Advisory(DA) と進入管制のための Final Approach Spacing Tool(FAST) が開発 されている [8] .
ヨーロッパにおいても 1990 年代より Arrival Manager (AMAN) と呼ばれる到着機に関 する管制の自動化が進められている [9][10] . AMAN は到着空港においてスムーズな航空 交通流の中で安全かつ効率的な手順を与えるものである. AMAN は飛行計画,レーダー 情報,航空機性能モデル,空域の制限(例えば 10,000ft 以下 250kt 以下の速度制限),後 方乱気流カテゴリーおよび気象情報を入力することで,ある地点(例えば滑走路末端,
最終進入フィックス)における到着予想時刻の算出,順番の決定, Time to Lose や Time to Gain およびそれを実現するための速度や針路の値を出力する.これらの基本的な機能に 加え,各国,各空港がそれぞれの環境に応じてカスタマイズして使用している.
日本においては 1993 年に電子航法研究所が到着機の順序・間隔付け支援システムの実 験室モデル COSMOS(Computer Oriented Spacing and Metering Optimization System) を試作 した [11] .これは到着機の着陸順序の決定や最終進入地点通過時刻の予測等をコンピュ ーターにより状況分析に必要なデータを示すことにより,ターミナル管制業務を支援す るシステムである.この機能は現在のターミナルレーダー情報処理システム
ARTS(Automated Radar Terminal System) に実装されている.また, 2010 年に羽田空港へ
の到着間隔を進入管制区以遠の航空路から設定するために湘南セクターが新設された.
しかしながら著者の経験上ならびに ARTS が 1 地点のみに風を入力するシステムである 事から国内における管制間隔の設定は管制官の経験により行われていると感じており,
自動化は発展途上であると推測する.
管制の自動化の他にも各種の航空交通管理の施策が行われている.日本では航空路誌
( Aeronautical Information Publication JAPAN : AIP JAPAN ) [12] に離陸時刻を指定する方 法( Expected Departure Clearance Time : EDCT )
2やフィックス離脱時刻の指定による航
2
EDCT
とは「Expect Departure Clearance Time
」の略で混雑が予想される空域に係る航空交通流の制御の一 つであり,離陸時刻を指定するものである.AIP JAPAN ER 1.19空交通流管理方式( Specifying CFDT for Arrival Spacing Program : SCAS )
3が記載され,
実施されている.
EDCT は混雑が予測される空域に係る航空交通流の制御のひとつであり,離陸時刻を 指定して行われる.しかしながら EDCT に合わせて駐機場を出発しようと試みても搭乗 予定旅客が出発時刻までに搭乗しない場合は出発が出来ないことや駐機場からの出発 を要求しても他の航空機により許可されない事,時刻通りに滑走路に向かっていても他 の離陸機や着陸機が存在した場合指定された時刻に離陸できないと言う様々な要因で 予定離陸時刻に離陸できない問題を含んでいる.
SCAS は管制官が,飛行中の航空機に対し,当該航空機の飛行経路上の特定フィック スにおける離脱時刻( Calculated Fix Departure Time : CFDT )を東京国際空港到着予定時 刻のおよそ 30 分前から 80 分前に指定するものである. SCAS は国内線では巡航時間 が短く調整できる時間が短いため,著者の経験からも管制官の要求を実現できるケース は少なかった.このことから近年 SCAS を指定された経験をしていない.国際線におい ては,他の FIR に入域時の管制間隔を設定するために FIR の境界となるフィックスの通 過時刻を指定する施策が実施されている.十分に長い距離で無理のない時刻を指定され ることから実現可能であり,管制間隔の設定には有効な施策であると考えられる.
ヨーロッパにおいては大規模空港を中心に A-CDM (Airport-Collaborative Decision
Making)[13] と呼ばれる出発時刻に対する制御が行われている.これは航空会社が旅客や
貨物の搭載状況を見ながら TOBT(Target Off Block Time) をシステムに送信する.システ
ムは TOBT を元に EUROCONTROL 内の空域の混雑状況や当該空港の状況を考慮して
TSAT (Target Start-Up Approval Time) を航空会社に知らせる. TSAT は地上係員が無線で
通知する,または航空機の前方にある Display 上に表示することでパイロットに知らせ る. TSAT は日本の EDCT と類似しているが, TOBT は適宜変更することができ,それ に伴って TSAT も変更されることから各出発機の状況をタイムリーに反映していると 言える.また,パリ・シャルルドゴール空港において RECAT-EU(European Wake Vortex Re-categorization)[14] と呼ばれる Wake Turbulence Category の変更が行われている.具体
的には 4 つある Wake Turbulence Category を 6 つに細分化しかつ上空においては一部
Category の Wake Turbulence Separation を短く設定している.ロンドン・ヒースロー空港
においては XMAN(Cross-border Arrival Management)[15] と呼ばれる到着機に対する速度 制限がある.これはヒースロー空港が混雑により Holding している航空機が発生してい る場合,巡航している航空機に Holding 時間に対応した速度に減速を指示するものであ る.
米国においてはニューヨーク JFK 空港において悪天時に出発経路を指定する Severe
Weather Avoidance Plan(SWAP)[16] が実施されている.悪天候時にはパイロットが機上レ
ーダーを使用して回避経路を決定するがパイロットの判断が一様ではないため,航空交 通管理においては非効率的となる.そのため航空路を管制しているニューヨーク
ARTCC(Air Route Traffic Control Center) が出発経路を決めることで空域を有効活用し航
3
SCAS
とは「Specifying CFDT for Arrival Spacing Program」の略でフィックス離脱時刻の指定を行う航空交空交通流の効率化を図っている.また,空港の容量を増大させるため天気が良好な場合 はパイロットが目視により先行機との間隔を確保する Visual Approach が多用されてい
る. Visual Approach 実施時の間隔設定及び後方乱気流の回避はパイロットの責任で行わ
れるため,管制間隔を短縮することが可能となり空港処理能力は向上する.しかし,経 路,高度についてもパイロットの判断で行う事となるため,管制官が航空機の挙動を完 全に予測することは困難である.よって混雑した空港においては必要に応じ経路,高度 を指定した Charted Visual Approach が実施される.経路,高度を指定することで空域を 有効に使用しつつ管制間隔の短縮を図っている.これらのことから米国では天候の状況 によって空港の処理能力を変更している.
このように日本ならびに海外では今後増大する航空交通量の対応が課題であり,長期 的な視点に立って様々な施策を模索している.
第 2 節 目的
本論文の目的は背景を踏まえ現在行われている航空交通管理の評価を行い,将来の軌 道ベース運用を実用化する際に必要となる航空機性能モデルの評価ならびに飛行管理 装置( Flight Management System : FMS )の RTA ( Required Time of Arrival )機能の精度 について検証し,混雑空港を対象とするシミュレーションを実施して便益の有無につい て検証することである.同時に現在のシステムでも実施可能な方法により潜在便益の有 無を確認し,効率的な運用を提案する.検証対象は混雑空港として日本で最も運航便数 が多い東京国際空港を選定する.
検証を実施するためには航空機性能モデルの精度が重要となってくる.航空機メーカ ーは航空機性能モデルを公表していない.そのため, EUROCONTROL は航空機性能モ デルとして BADA モデル( Base of Aircraft DAta model )を開発した.過去の研究では航 空交通管理の研究で広く使用されている性能モデルである BADA モデルと実際に運航 された航空機の飛行データと直接比較することで航空機性能モデルの精度を検証して いる.しかし,上昇中においては両者に差があるという結果もある.これに対し,著者 はその結果から上昇中の誤差は他の要因による誤差が大きいと推測し,他の誤差の要因 を極力排除した飛行データを使用して再度直接評価を実施する.それと同時に本論文で 使用する解析ツールの結果の精度も重要である事から性能モデルを使用した解析ツー ルについても検証を行う.
また,到着時刻管理で重要な役割を持つ FMS の最適化アルゴリズムもメーカーから 公表されていない.将来実施されるであろう 4 次元軌道運用において RTA 機能を使用 して管制間隔を設定することが考えられており,その場合,管制は RTA 機能の特性を 知り,実現可能な管制指示を発出する必要がある.そこで,本論文では電子航法研究所
所有の FMW ( Flight Management Work Station )という FMS のシミュレータを使用して
RTA 機能のロジックを解明し,さらに,風に対する耐性を検証する. FMS の RTA 機能
は後述する Holding を実施する際にパイロットが計算している Holding Point までの最適
な速度を計算することが可能である.
混雑空港における非効率性の要因は様々あるが一例として「過度なレーダーベクタ ー」などが挙げられる.通常,管制官はレーダーを使用してレーダーベクターを実施す る.滑走路閉鎖などレーダーベクターでは対処できない大規模な遅延が発生する場合に
Holding を指示し,到着機の入域数を制御する.本論文では到着機の入域数制御のため
に使用されている Holding を燃料消費量の観点から検証する.管制官はレーダーベクタ ーを実施する際に速度も指示する.到着時刻を遅らせる必要がある場合,管制官がレー ダーベクターで指示できる最低適用速度はパイロットが計算する最適速度より速く,単 位時間当たりの燃料流量は大きい.このことからパイロットが速度を決定することで便 益が得られると推測する.本論文ではこの状況を再現し,燃料消費量の便益と言う観点 から現在のシステムで実施可能である Holding を実施することによる便益について検証 を行う.
最後に将来実施されるであろう 4 次元軌道をシミュレーションし,管制間隔の設定と 燃料消費量の削減が実施できることを検証し,その方策について提案する.背景で述べ たとおり, CARATS では軌道ベースの ATM 運用を目指している.ここではそのひとつ である最適軌道を飛行しかつ到着機に到着時刻を指定する場合についてシミュレーシ ョンし,管制間隔の設定と便益について検証する.
第 3 節 構成ならびに単位
本論文は背景ならびに現状,便益を検証する際に使用する解析ツールおよび解析ツー ルの検証,便益の検証結果,結論の 4 つの内容で構成されている.
背景ならびに現状は第 1 章,第 2 章で示す.
第 1 章「序論」では背景,研究目的および構成を示す.
第 2 章「混雑空港の現状解析」では東京国際空港の概要について説明し,レーダーを 使用した経路延長による到着機の制御についての現状を示す.
便益を検証する際に使用する解析ツールおよび解析ツールの検証を第 3 章から第 5 章 で示す.
第 3 章「解析ツール」では本論文で用いる解析ツールについて過去から九州大学で研 究されているものを含め説明する.
第 4 章「 BADA モデルの精度」では航空交通管理の研究で一般的に使用されている
EUROCONTROL が開発した航空機の性能モデルである BADA モデルの精度について検
証する.これによりシミュレーションの結果が実運航と乖離がないかについて確認する ことができる.
第 5 章「飛行管理装置を用いた到着時刻制御」では現在運航に使用されている飛行管 理装置(FMS)の機能のひとつ RTA 機能について検証する.RTA 機能は 4 次元軌道運 用において管制間隔設定のキーとなる機能である.また,第 6 章で検証する Holding を 実施する際にも Holding Point まで最適な速度で飛行することが可能となる.
検証結果を第 6 章,第 7 章で示す.
第 6 章「現在の到着機制御における潜在便益」では電子航法研究所において試験運用 されている航空路監視レーダーの SSR モード S から得られた東京国際空港の到着機の データを使用して燃料消費量の観点から現在の航空管制において比較的容易に実現が 可能な運用によって得られる便益を検証する.具体的にはレーダーベクターで設定され た管制間隔と同じ管制間隔を保ちながら Holding を実施した場合を想定し,燃料消費量 を比較することで便益を検証する.
第 7 章「 4 次元軌道運用による便益」では将来運用されるであろう 4 次元軌道につい て現実的かつ具体的な提案をする.提案の妥当性を確認するために国土交通省が公開し
ている CARATS Open Data を使用して軌道ベース運用を実施した場合の便益について
検証する.
結論は第 8 章で示す.
本論文で使用する単位は SI 単位系の他に航空界で一般的に使用されているフィー ト [ft] ,マイル(海里) [NM] ,ノット [kt] を使用している.
1ft = 0.3048m 1NM = 1852m 1kt = 1NM/hour
第 2 章 混雑空港の現状解析
第 1 節 はじめに
この章では混雑空港である東京国際空港の概要を示し,実際の監視データを使用して 現在の到着管理システムすなわちレーダーを使用し飛行経路の延長を行った管制につ いて解析する[17].第 2 節で概要を示す.第 3 節では航空局が提供する監視データ
CARATS Open Data を用いてレーダーベクターが行われている現状について解析を行
う.第 4 節ではまとめを記載する.
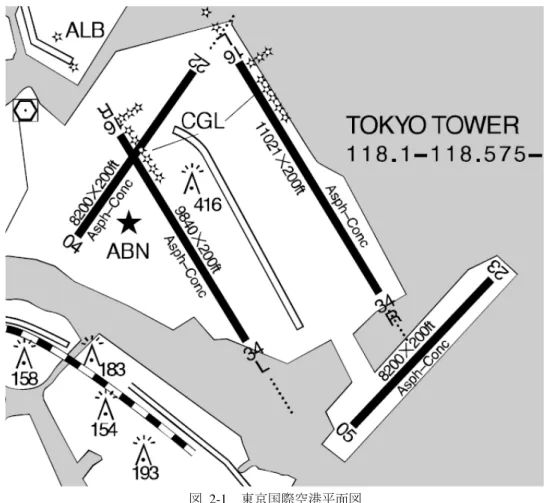
第 2 節 東京国際空港の概要
東京国際空港は図 2-1 に示すように 3000m 滑走路 2 本と 2500m 滑走路 2 本の合計 4 本の滑走路で構成されている.滑走路番号は基本的にその滑走路の磁方位を 10 分の 1 にし,小数点以下を四捨五入したもので表される.また平行滑走路が存在するときは
Left , Right で区別される.東京国際空港の滑走路番号は 3000m 滑走路が 16R/34L と
16L/34R であり, 2500m 滑走路が 04/22 と 05/23 である.東京国際空港において着陸に
使用する滑走路は北方面からとそれ以外の方面の到着機で分けられている.本論文では 交通量が多い北方面以外の航空機を取り扱うことから北方面以外の進入方式について 2017 年 1 月 5 日発効の航空路誌に公示されている Chart を用いて説明する.
北風が卓越している場合, 北風運用が行われ離陸は 05 と 34R を, 着陸には 34L と 34R を使用する.通常北方面以外からの到着機は 34L に,北方面からの到着機は 34R に着 陸する.北風運用が行われている場合, 34L では図 2-2 に示す標準計器到着経路
( Standard Instrument Arrival Route: STAR )
4ARLON Arrival から計器進入方式 ILS Z 34L が, 天候が良好な場合は騒音軽減方式に従い図 2-3 に示す KAIHO Arrival から ILS X 34L が実施される.ここで標準到着経路とは計器飛行方式で飛行する航空機に航空路から計 器進入方式までを繋ぐ経路のことである.
4 標準計器到着経路は航空路から計器進入方式の初期進入開始点までを繋ぐ経路のことを言う.英語での
南風が卓越している場合,南風運用が行われ離陸は 16L と 16R を,着陸には 22 と 23 を使用する.通常北方面以外からの航空機は 22 に,北方面からの到着機は 23 に着陸す る.南風運用が行われている場合, 22 では図 2-4 に示す BACON Arrival から LDA W 22 が実施される.いずれの到着方式も北以外からの航空機は ADDUM を通過した後にそ れぞれの経路を飛行することが標準である.しかし,状況によってはレーダーを使用し
て ADDUM を通過することなく計器進入方式の開始点, ARLON , KAIHO および BACON
へのショートカットを指示し効率的に運用することも行われている.また,離陸機が少 ないときなどは方面別ではなく駐機するターミナルによって使用する滑走路を変更す ると言った柔軟な対応もなされている. 23 時から 6 時までの深夜時間帯では 34R を優 先的に使用する騒音軽減方式が設定されている.
図
2-1
東京国際空港平面図(a)
計器進入方式ILS Z 34L (b)
標準計器到着経路ARLON Arrival
図 2-234L
における計器進入方式およびSTAR(通常)
(a)
計器進入方式ILS X 34L (b)
標準計器到着経路KAIHO Arrival
図 2-334L
における計器進入方式およびSTAR(天気良好)
(a)
計器進入方式LDA W 22 (b)
標準計器到着経路BACON Arrival
図
2-4 22
における計器進入方式およびSTAR
第 3 節 レーダーベクターの現状解析
この節では現状の運用においてベクタリング指示がどのような影響を与えているか を解析するためにベクタリング度という指標を使用して検証する.解析対象は東京国際 空港への到着便のうち北風運用時に北以外から到着する便,すなわち ARLON および KAIHOを通過して34Lまたは34Rに着陸した航空機を解析対象とする.使用データは
CARATS Open data で公表されている 42 日間のうち 1 日を通して北風運用が行われてい
る 17 日間とし,この間に到着した便を対象とする.
CARATS Open data とは国土交通省航空局が公開しているデータであり,航空路監視
レーダーが受信した位置情報を 4 つの航空交通管制部で運用されている RDP(Radar
Data Processing) システムを経由した後,管制卓において管制官に提供されているもので
ある.表 2-1 は CARATS Open data の概要を示している [18][19] .
表 2-1
CARATS Open data
の概要期間 2012 年 5 月~ 2013 年 3 月のうち 42 日間 対象 福岡 FIR 内における定期航空便 便数 約 3600 便 / 日
項目 時刻,仮想便名,緯度,経度,高度,型式
データ周期 約 10sec
図 2-5 は 2012 年 5 月 9 日の到着機の軌跡と同心円である.一部の軌跡が蛇行しており,
レーダーベクターにより管制間隔を設定していることが分かる.
合流点の一つである ARLON を中心として半径が 25,50,75,100,150,200NM の円の領域 内における実際の飛行距離と最短距離との比をベクタリング度とする.式(2.1)はベクタ リング度を表している.また,ベクタリング度は機体毎に定義する.
𝛾𝛾
𝑡𝑡= 𝐷𝐷
𝑠𝑠𝑓𝑓𝑟𝑟𝑓𝑓𝐷𝐷
𝑡𝑡𝑇𝑇𝑓𝑓𝑟𝑟𝑓𝑓(𝐷𝐷
𝑡𝑡𝑇𝑇𝑓𝑓𝑟𝑟𝑓𝑓= 25,50,75,100,150,200[NM])
(2.1)
ここで 𝛾𝛾
𝑡𝑡は機体 i のベクタリング度である. 𝐷𝐷
𝑡𝑡𝑇𝑇𝑓𝑓𝑟𝑟𝑓𝑓は最短距離であり,それぞれの半径 に対応する. 𝐷𝐷
𝑠𝑠𝑓𝑓𝑟𝑟𝑓𝑓はそれぞれの半径の円内における実際の飛行距離である.図 2-6 はそ れぞれの半径でのベクタリング度を示している.横軸は同心円を通過した時刻を表して いる.時刻によってはばらつきがあるものの,一日を通してベクタリングされているこ とが分かる.また, 25NM 以内は進入開始点が近いこともあり,ベクタリング量が少な く管制間隔の設定はほぼ終了していることが予想される.
図 2-7は150NMの同心円を通過した時刻間隔を30秒ごとにヒストグラムで表してい る.平均値は 154.4 秒となっており, ARLON における間隔を 2 分と仮定すると余裕があ る.しかし,図から指数分布と推定され航空機の入域に不規則性がある事が分かる. 0
~ 30 秒の間隔で通過した航空機が最も多く,管制官はレーダーベクターを実施し飛行時 間を調整することで間隔を設定していると考えられる.図 2-8 はこの混雑時間帯である 8.2 時から 9.8 時までを合流点からの距離と時刻の関係で表している.それぞれの色はベ クタリング度を示しており,赤い色ほど大きい値であることを示している.また,合流
点から 150NM の地点に横線を引いている.この図においても 150NM を通過する時刻間
隔から不規則性がある事が分かる. 150NM 通過時と 20NM 通過時で順番は同じとなって
おり, First come, first served の原則のもので管制が行われていることが分かる.当然の
ことながら先行機との間隔が短い機体は後にベクタリングを受けており,通過時刻の不
規則性はベクタリングの原因のひとつとして推測できる.また,合流点から 20NM の通
過時刻間隔ではおおむね同程度の間隔が確保されているが極端に長い間隔のものも含
まれており,特徴的な不規則性があった.また,機体によっては合流点から遠ざかる方
向にベクターを受ける場合もあった.図 2-9 は ARLON から 150NM の地点から東京国際
空港から 15NM の地点までに要した飛行時間の1日分のヒストグラムである.表 2-2 は
全てのフライトとそれぞれの後方乱気流区分のカテゴリーに分けた機体の飛行時間の
平均値および標準偏差を表したものである.後方乱気流区分のカテゴリーが異なると最
終進入においては異なる管制間隔を設定する必要があるが,このフェーズでは飛行時間
の差は見られなかった.多くの航空機は 24 分から 30 分で通過しているが, 35 分以上飛行
している航空機も存在していた.
図 2-5 到着機の軌跡と同心円
136 138 140 142 144
32 33 34 35 36 37 38
Longitude[deg]
L at it ud e[ d eg ]
Arrival Flights
Concentric Circle
ARLON
(a) 25NM (b) 50NM
(c) 75NM (d) 100NM
(e) 150NM (f) 200NM
図 2-6 ベクタリング度
図 2-7
150NMを通過した時刻の間隔(17日間)
図
2-8
合流点からの距離と時刻の関係0 200 400 600 800
0 200 400 600 800 1000 1200 1400
通過時刻間隔[s]
C o unt s
実データ 指数分布
図
2-9
実際の飛行時間(2012/5/9
)表
2-2
飛行時間の平均値及び標準偏差平均値 (sec) 標準偏差 機体数
全フライト 1650.2 189.2 364 ヘビー機 1648.2 177.5 109 ミディアム機 1651.1 194.3 255
12000 1400 1600 1800 2000 2200 2400 2600
5 10 15 20 25 30 35 40 45
飛行時間[s]
Counts
Flight Time Mean value
第 4 節 まとめ
この章では現状のレーダーによるベクタリングの状況を示す.
・ レーダーベクターは日常的に行われていた. ARLON から 20NM では一部間隔の長い ものを除きほぼ同一の間隔で通過しており,この時点において進入着陸のための間 隔調整は終えていた.
・ ARLON から 150NM を通過し 15NM を通過するまでの飛行時間は多くの飛行機が 24
分から 30 分であり,平均値は 27.5 分であった.しかし, 40 分以上の長いものもあっ た.また入域する際の他機との間隔は指数分布を示していることからランダムに入 域が行われていると考えられる.
・ 合流点から遠ざかる方向にレーダーベクターされている機体も確認できた.
・ 入域する航空機の 150NM 地点での通過時刻の平均値は 154.4 秒であり,出域時の間 隔が後方乱気流間隔を適用し2分であると仮定すると余裕があった.しかし,入域 はランダムに行われており,先行機との間隔が 0 ~ 30 秒の航空機が最も多く,管制 官は飛行時間を調整することで間隔を設定していると推定された.
以上のことから出域時の航空機の間隔を設定する必要があることが分かった.現在は 管制間隔設定にレーダーベクターが行われている.その他の方法として現在でも利用で
きる Holding や将来の実施が計画されている 4 次元軌道運用があり,次章以降でその便益
について検証する.
第 3 章 解析ツール
第 1 節 はじめに
個々の航空機は飛行状態について十分な情報を持ち,軌道最適化についても飛行計 画,飛行管理装置により適切に実施することができる.しかし,現状の航空管制おいて は,それらの情報を共有することを前提としていないため,混雑空域における管制指示 によって生成される飛行軌道の飛行効率について管制を行う地上側は十分な情報を持 っていない.将来の航空交通管理においては,安全間隔を確保することを前提に全体の 最適化を行うことが理想である.そのためには地上側においても監視レーダーの情報か ら飛行状態を推定する技術,性能モデルや気象情報を使って飛行時間や燃料消費量から なる飛行効率を最適化する技術が必要になる.これらの技術は,新しい航空交通管理に よって得られる便益の評価においても同様に必要である.
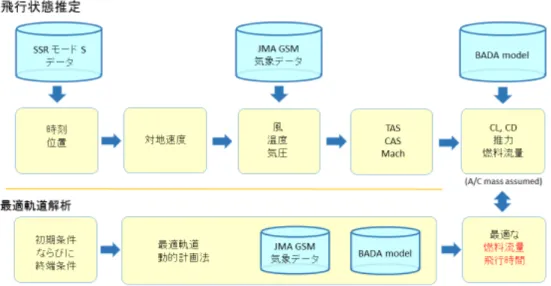
この章では地上で得られる情報から飛行状態を推定するツールである飛行状態推定 と条件を変更することで最適軌道を計算するツールである軌道最適化について説明す
る.図 3-1 は飛行状態推定と軌道最適化の概念図である.図の上が飛行状態推定,下が
軌道最適化を表している.
第 2 節では飛行状態推定について説明する.運航効率の客観的分析を行うためには航 空機の状態を推定する必要がある.ここでは地上で得られる位置情報すなわち緯度,経 度,高度と時刻を取得することによって飛行状態推定を行う方法について説明する.位 置情報が得られると対地速度ベクトル( GS ,トラック角,上昇率)を計算することが 可能となる.この対地速度に公開されている気象庁の大気データを使用することで航空 機のエアデータ,すなわち,真対気速度( TAS ),較正対気速度( CAS )ならびに Mach 数が計算できる.得られた TAS , CAS ならびに Mach 数に加え航空機の重量が分かると BADA モデルから揚力係数 C
L,抗力係数 C
D,推力ならびに燃料流量を計算することが できる. BADA モデルについては次章で説明する.
第 3 節では軌道最適化について説明する.九州大学では潜在便益の評価や 4 次元軌道
予測のために動的計画法を使用した最適軌道生成ツールを開発した.本論文ではこの軌
道最適ツールを使用して実際の状態と最適化した状態を比較し,現状の分析,潜在便益
の有無について評価する.
図 3-1 飛行状態推定と軌道最適化の概念図
第 2 節 飛行状態推定
第1項 位置情報
地上において位置情報は各種航空保安施設から入手することが可能である.位置およ び高度情報は航空路監視レーダー( Air Route Surveillance Radar : ARSR ),洋上航空路 監視レーダー( Oceanic Route Surveillance Radar : ORSR )および空港監視レーダー( Airport Surveillance Radar : ASR )に設置されている二次監視レーダー( Secondary Surveillance
Rader : SSR )から得られる.二次監視レーダーは航空機に搭載している ATC トランス
ポンダーに対して質問波を発信する.質問波を受信した ATC トランスポンダーは機体 の気圧高度を含むデータを応答波として発信する.この応答波を受信することで得るこ とができる.
また,近年では ADS(Automatic Dependent Surveillance :自動位置情報伝送・監視機能 ) を装備する機体も増えてきている. ADS は航空機の航法システムから得られる航空機 の位置情報を自動的に管制システムに伝送している.航空機が自らの情報を発信してい るため,高い精度の位置情報を得ることができる.管制はこれらの情報を処理すること でレーダーと同様の表示を行い,航空機を監視することが可能である. ADS には 2 種
類有り, 1090MHz で自動的に放送している ADS-B と主に洋上で使用され衛星を介して
地上にデータを送信する ADS-C がある.また, ADS-B の機能には自機情報を発信する
ADS-B OUT と他機が発信した情報を受信する ADS-B IN がある.航空交通管理の研究
では主に航空機から位置情報を含むデータが得られる ADS-B OUT の情報を受信し使用
される.
この節では時刻,位置情報ならびに気圧高度が得られる SSR , ADS-B といった監視 データを使用して飛行状態推定の方法について説明する.
第2項 エアデータの推定
この項では監視データから得られた時刻,緯度,経度および気圧高度と,同時刻の気 象データにより航空機の幾何学的高度ならびにエアデータを推定する方法を述べる.
気 象データの内挿補間は,時刻,緯度,経度についてはそれぞれの変数に対して線形となる補 間を行い機体の時刻,位置における物理量を推算する.与えられた気圧における気象データ の気圧面の内挿補間については,気圧面間の温度の変化を考慮した気圧と高度の内挿関数を 使ってジオポテンシャル高度,幾何学的高度,気温,水平面の風を導く.これらの機体の位 置における気象情報と慣性速度ベクトルから実際の航空機が算出しているTAS
,CAS
およ びMach
数のエアデータを推定する.気象データの内挿
エアデータの推定に使用する気象予報データは気象庁が発表している客観解析デー タを用いる [20] .客観解析データは数値計算に用いる物理モデルや格子間隔等の違いに より数種類発表されている [21] .表 3-1 は 3 種類の数値予報 GPV データ, GSM(Global
Spectral Model) 全球域, GSM 日本域および MSM(Meso-Scale Model) に格納されている物
理量を示している.
表 3-1 数値予報GPVデータの概要
![図 1-1 国際交通量の需要予測(CARATS より) 航空機の増加に伴う様々な課題を解決するために, ICAO はグローバル ATM 運用概 念 [3] を提案している.これは航空交通の安全性,効率性,環境問題への対応等の目標 を達成するため, 将来の ATM がどのように運用されるべきかを定めたビジョンであり, 運航者の求める飛行軌道を最大限満足するため,全飛行フェーズにおいて飛行軌道の管 理等を行っていく方向性が示されている.](https://thumb-ap.123doks.com/thumbv2/123deta/9918622.1919750/16.892.177.717.132.486/国際交通需要予測航空機グローバルべきかビジョン求めるフェーズ.webp)
![図 2-5 到着機の軌跡と同心円 136138140142 14432333435363738Longitude[deg]Latitude[deg] Arrival Flights Concentric CircleARLON](https://thumb-ap.123doks.com/thumbv2/123deta/9918622.1919750/29.892.181.704.147.563/図25到着機の軌跡と同心円1361381414214432LongitudedegLatitudedeg.webp)
![図 2-7 150NMを通過した時刻の間隔(17日間) 図 2-8 合流点からの距離と時刻の関係0200400600 8000200400600800100012001400通過時刻間隔[s]Counts 実データ 指数分布](https://thumb-ap.123doks.com/thumbv2/123deta/9918622.1919750/31.892.235.612.152.538/NM通過時刻間隔日間合流から距離時刻関係過時刻間データ指数分布.webp)