九州大学学術情報リポジトリ
Kyushu University Institutional Repository
き裂先端部の塑性挙動に着目した疲労寿命評価法に 関する研究
丹羽, 敏男
https://doi.org/10.11501/3142524
出版情報:Kyushu University, 1998, 博士(工学), 論文博士 バージョン:
権利関係:
〆
き裂先端部の塑性挙動に着目した 疲労寿命評価法に関する研究
平成10年3月
丹羽 敏男
目次
1 緒論 1
1.1 本研究の背景および目的 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1 1.2 疲労き裂伝播に関する従来の研究 ・・・・ • . . • • • • • • • . • • • • • • • • • • • 2
1.3 本論文の構成 . • • • • ・・・・・・・・ ・ ・・・・・ ・・ ・ ・・・・・・ 4 参考文献 ・・・・・・ • • • • • • • • • • • • ・・・・ ・・・・・・・・・・・・・・・・ 4
2 き裂先端部の塑性挙動に着目した疲労き裂伝播員ij 6 2.1 緒言 ・・・・・ ・・ ・・・・ ・・・・・・・・・・・・・・・・・・・・・・ ・・ ・・ 6 2.2 き裂材の1サイクノレ中におけるコンブライアンス変化の巨視的考察 . • • • • • • • • 7 2.3 塑性挙動を考慮した疲労き裂伝播則の提案 . • • • . • . • • • • • ・・・・・・・・・ 10 2.4 RPG荷重の計測法 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11
2.4.1 疲労試験システムの開発 . . • • • • • . • • . • • • • • . • • • . • . • • • • • 11 2.4.2 RPG荷重の決定法 ・・・・ • • • • • • • • • • • • . • • ・・・・・・・・・・ 14 2.5 RPG規準による疲労き裂伝播則の実験的検証 • • • . • • • • • • • • . ・・・・ 18 2.5.1 供試材および実験方法 . • • . • • • • . • • • • • • . . • • . . • . • • . • • . 18 2.5.2 実験結果および考察 ・・・・・・・・・・・ • • • • . • • • • . • • ・・・・・ 19 2.5.2.1 疲労き裂伝播速度におよぼす応力比の影響 . • • • • • • • • • • • • 19 2.5.2.2 低き裂伝播速度領域における疲労き裂伝播則について. • • . • • • 20 2.6 結言 ・・・・・・・・・・・・ • • . • • . • • • • • ・・・ ・・・・・・・・・・・・・・ 23 参考文献・・・・・・・・・・・・・・・・・・・・・・・・・ • • • • • • • • • • ・・・・ 24
3 任意応力場における板厚貫通き裂の開閉口挙動推定法について 26 3.1 緒言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・・・・・・・・・ ・ 26 3.2 任意応力場における弾性き裂のき裂関口変位推定法 ・・・・・・・・・・・ ・・・・ 27 3.3 き裂開閉口挙動の定式化 . • • • • • • • • • • . • • • • • • • • • • • • • • • • • • • • 31 3.4 疲労き裂伝播解析プログラムについて . • . • • • • • • • • • . ・・・・・・・・・・・ 39 3.5 RPG荷重の解析例および考察 ・・・・・・・・・ • • • . • • • • • . • • • • • • • • • 39
3.5.1 解析時のき裂増分量について • • • • • • • • • • • • • • • • • • • • ・・・・ 40 3.5.2 RPG荷重におよぼす塑性収縮係数の影響・・・・・・・・ ・・・ ・・・・・ 41 3.5.3 RPG荷重におよぼす外荷重変動の影響 ・・・・・・・ ・ ・・・・・・・・ ・ 43 3.6 結言 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 45
参考文献 ・・・・・・・・・・・・・・・・・・・・・・ . • • . • • . • • • • ・・・・・・ 45
4 長いき裂に対する疲労き裂の遅延減速現象とき裂停留条件について 47 4.1 緒言 .• • • • • • • • • • • • • • • • • • • • • • • • • • ・ ・・・・・・ ・・・・・・ 47 4.2 供試材および実験方法 .• • • • • ・・ ・・・・ ・ ・・・・・ ・・・・・・・ 48 4.3 実験結果および考察 ・・・・・・・・ ・・・・ ・・・・・ ・・・・・ ・・・・・・・ 50 4.3.1 一定荷重振幅下における疲労き裂伝播挙動 .• • • • • • • • • • • • • • • • • 50 4.3.2 最大荷重が低下する 2段1重繰り返し荷重下における疲労き裂伝播挙動 ・・ 53 4.4 ムKRPの物理的意味 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 57 4.5 結言 ・・・・・・・・・・・・ • • • . • • • • • • • • ・・・ ・・・・・ ・・・・・ 58 参考文献・・・・ ・・ • • • • • • • • • • • • • • • • • • • • • • • • • • • • ・・・・ 59
5 残留応力場における長いき裂の疲労き裂伝搭挙動 60 5.1 緒言 ・・・・・・・・・・ ・・・・・・・・・ ・・・・ ・・・・・・・ ・・・・・・・・ 60 5.2 供試材および実験方法 .• • • • • • ・ ・・・・・・ ・・ ・・・・ ・・・・・・・ 60 5.3 実験結果および考察 • • • • • • • . • • • • • • • • • • • . • • .. • ・・・・・・・・・ 62 5.3.1 最小荷重をステップ状に上昇させた場合の疲労き裂伝播挙動 ・・・・・・・・ 62 5.3.2 残留応力場における疲労き裂伝播挙動 • • • • • • ・・・・・・・・・・・・・ 63 5.4 結言 ・ ・・・・・・・・・・・・・・ ・・・・ ・・・・・・ ・・・・・・・・・・・・ 67
参考文献 ・・・・・・・・・・・・・・・ ・・・・・・・ ・・・・・・・・・・・・・・・・・ 68
6 発生と伝播の統一理論による疲労寿命評価法についての可能性 69 6.1 緒言 . • • • • • • • • • • • • • • • . • • . • • • . • • • • . • • . • • . • • • • • • • • 69 6.2 供試材および実験方法 ・・・・・・・・・・・・・・・・・・・ ・・・・・・・・・・・・ 70 6.3 切欠底部から発生・伝播する表面き裂のアスペクト比変化 • • • • • • • • • • ・・・ 70 6.4 切欠底部から発生する表面き裂の応力拡大係数 • • • • • • . • • . • • . • • . . . . 74 6.5 微小き裂の疲労き裂伝播挙動.. • • . • • . • • • • • • • • ・ ・・・・・・・・・・・ 77 6.6 微視き裂の成長曲線推定法の検討 ・・・・・・・・・・・ ・・ ・・・・・・・・・・・ 80 6.7 結言 ・・・・・・・・・・・・・・・・・・・・・ ・・・・・・・ ・・・・・・・・・・・・・ 83
7 結論
参考文献 . • . . • . . . . .. • • • • • • • • • • . .. • • . • . • . • • .. • • • • • . ・・ 83
85
付録A 固有応力法を応用した結合力モデル 87
A.1 はじめに . • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 87 A.2 固有応力法 ・・・・・・・・・・・・・・・・ • • • • • • • • • • • • ・・・・・・・・・ 87 A.2.1 固有応力 .• • • • • • • • • • • • . . • . • • • • • • • • . • • • • • . • • • • . 88 A.2.2 仮想外力と仮想体積力 • • .. • • . • • . • • . • ・・・・ ・・・・・・・・・・ 88 A.2.3 溶接残留応力および変形に関する一例 ・・・ • • • • • • • • • • • • ・ ・ 89 A.3き裂前方 の塑性域の拡がりと仮想、き裂面に働く等価固有応力 . • • .. • • • • ・・・ 90 A.4き裂関口変位の定式化 .• • . • • . • • • • • . • • . • • • • • • • • . • • • • • • • • 96 A.5固有応力法を応用した結合モデノレによるき裂開口変位 .• • • • • • • .・・・・・・・ 99 A.6おわりに . • • . • • . . • . • • • • . • • • . • • • . • • • • • • • • . • • • . • • • • . 103
謝辞
参考文献 . . • . • • . . • .. • • . • • • • • • • • • • • • • • • • . • . • • .. • ・・・・ 104
105
第1章 緒論
1.1
本研究の背景および目的
近年、 一般船体構造および一般溶接構造には、 静的強度に基づいた設計基準が採用されてい る現状からコスト面で有利な高張力鋼 が多用化されているが、 そのほとんどがT:vICP(Thermo l'vlechanical Control Process)鋼板である口 このTl\ICP型高張力鋼板は、 低炭素当量化による溶 接性の向上、 溶接継手熱影響部の破壊靭性向上など従来鋼 に比べ優れた特徴を有している。 その ため、 現在では、 船舶および溶接構造物の脆性破壊事故はほとんど見られなくなった。
母材の疲労強度は高張力化により向上するが、 溶接継手の疲労強度はほとんど向上しないこと がこれまでの研究で報告されている。 この傾向はT:\ICP型高張力鋼でも同様で、 溶接継手の疲労 強度は改善されていない。 静的強度に対応して許容応力を上げたことにより相対的に実構造物の 疲労強度を低下させることになり、 その結果疲労損傷が増加しているのが現状である。
実構造物には構造的不連続部が存在し、 この不連続部により大きな応力集中が生じる。 また、
この個所には溶接による引張残留応力が作用する場合が多く、 この部分からき裂が発生し破壊に 至る。 さらに、 製造時の非破壊検査で検出できなかった欠陥が存在すれば、 それを起点として容 易にき裂が発生し破壊に至る。 したがって、 疲労き裂の発生を完全に防止することは不可能であ り、 概念的には疲労設計として克服、 防止という観点から力づくで破壊を抑え込んできた破壊防 止設計を廃止し、 損傷許容設計が採用されるようになってきている。
この損傷許容設計の基本的な考え方は、 実構造物のき裂の発生や製造時の欠陥を極力少なくす る一方、 見逃し欠陥の寸法、 運用中の疲労き裂進展を定量的に把握し、 急速破壊が生じる限界欠 陥寸法に至る以前に検査で検出し、 対策を講ずることにある。 したがって、 保守管理上その疲労 寿命を精度よく予測することは重要不可欠である。
疲労寿命は、 き裂発生寿命とき裂伝播寿命の和で与えられ、 前者はS-N曲線で、 後者は破壊力 学的 手法でこれまで推定されてきた。 しかしながら、 実構造物の疲労寿命を推定する場合、 基礎 試験片および、構造要素モデ、ノレ試験体を用いた疲労試験で得られるS-N曲線で推定される発生寿命 が、 実構造物においてどれだけの大きさのき裂に対応するか未だ明確にされていない。 また、 こ の破壊力学を適用する際の初期き裂の与え方で推定される寿命は左右されるので、 適時都合のよ い初期き裂長さを与えて疲労寿命を予測しているのが現状であり、 発生と伝播を理論的に結びつ ける手法は未だ確立されていない。
このような背景から、 本研究は信頼性の高い疲労寿命評価を行うためにき裂の発生もき裂の伝 播過程としてとらえ、 き裂の発生と伝播を同一の理論体系で寿命評価できる手法を模索して実施 したものである。
疲労き裂伝播に関する従来の研究
疲労き裂伝播に関する研究は、破壊力学が普及する以前にも数多くなされており、疲労き裂伝 播速度dα/dNを以下のような関数形で表すことが試みられてきたl)D
1.2
三三=
f(σ?α) Ci) dN、‘l』ノ寸』ムーーム/gl、、
作用応力 き裂長さ 材料定数 σ
α C�
しだた
これらの式は、材料定数を適当に選択することにより個々の実験結果についてはうまく説明でき ても、 試験片形状および負荷条件など異なった広範囲の条件下では必ずしも一般的に成立しない。
これに対して応力拡大係数Kを考えると、 試験条件にかかわらずき裂先端近傍の応力、 ひずみ 状態が一義的に規定されることから、 Parisら2)は疲労き裂伝播速度と応力拡大係数範囲ムKの関 係を調査し、両者の聞には
2竺
二C1バ(ムK)m九LdN (l. 2)
が成立することを明らかにした。(l.2)式は、 Parisの伝播則と呼ばれ、
播に関する研究は急速に発展した。
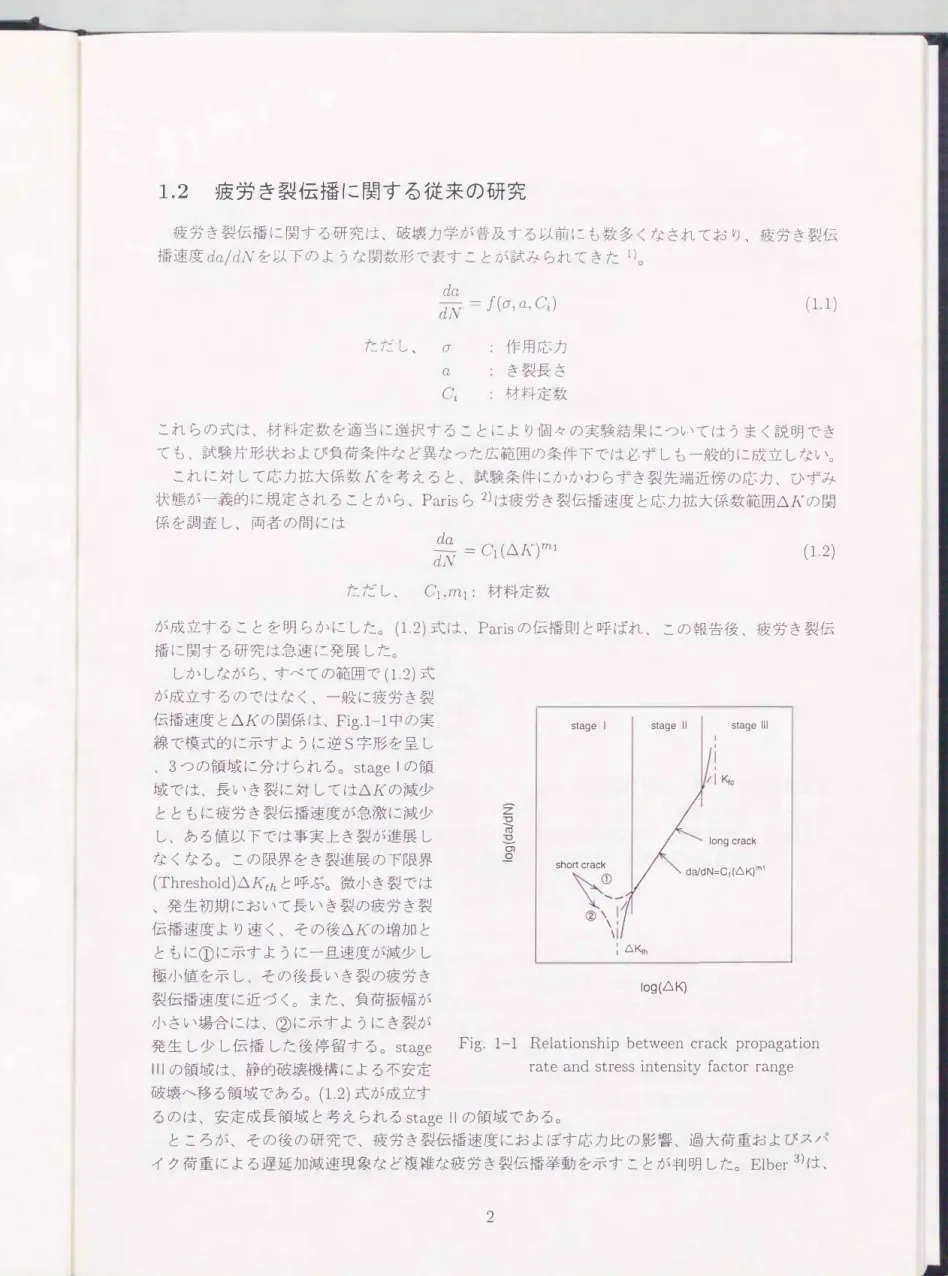
しかしながら、すべての範囲で(l.2)式 が成立するのではなく、 一般に疲労き裂 伝播速度とムKの関係は、Fig.l-1中の実 線で模式的に示すように逆S字形を呈し
、 3つの領域に分けられる。 stage 1の領 域では、 長いき裂に対してはムKの減少 とともに疲労き裂伝播速度が急激に減少 し、 ある値以下では事実上き裂が進展し なくなる。この限界をき裂進展の下限界 (Threshold)ムKthと呼ぶ。 微小き裂では
、 発生初期において長いき裂の疲労き裂 伝播速度より速く、 その後ムKの増加と ともに①に示すように-_ê_速度が減少し 極小値を示し、 その後長いき裂の疲労き 裂伝播速度に近づく。また、負荷振幅が 小さい場合には、 ②に示すようにき裂が 発生し少し伝播した後停留する。 stage 川の領域は、 静的破壊機構による不安定 破壊へ移る領域である口(l.2)式が成立す
るのは、 安定成長領域と考えられる stage 11の領域である。
ところが、 その後の研究で、 疲労き裂伝播速度におよぼす応力比の影響、 過大荷重およびスノ。
イク荷重による遅延加減速現象など複雑な疲労き裂伝播挙動を示すことが判明した。 Elber 3)は、
この報告後、 疲労き裂伝
stage 111
内aMkn ノ'
long crack da/dN=C1 (6K)ml
log(ムK)
stage 11 stage 1
short crack
、,(①
\ 、、�
②\ ! A
;ムKlh C1,m1 :材料定数
(Z乏の刀)mo一
ただし、
Fig. 1-1 Relationship between crack propagation rate and stress intensity factor range
疲労き裂は自身の高応力/ひずみ集中による引張塑性変形領域内を進展するため、き裂面内に残留 引張変形層が形成されるので、 負荷条件が高応力比である場合や過大荷重が作用した直後を除け ば、 たとえ引張繰り返し負荷を与えた場合でも最小荷重時にき裂が閉口することを実験的に確認 し、 弾性学的に応力特異性が現れるき裂開口街重以上の荷重振幅に対応する有効応力拡大係数範 囲ムKejjをParis員Ij((1.2)式)のムKと置き換えた疲労き裂伝播則
だたし、
ここで
会= C2(ムKef
f)m2 = C2(U ムK)m2
ムKeff - (Pmω一九.p).j7fãf(α/W)/t
ムKeff
Pmax Pmin Pop
U
Iてmαz Kmin Kop
α
W
f(α/W)
C2,m2
u _ Pmax - �叩 二 Kmax - Kop Pmax - Pmin Kmαx - Kmin
き裂開口荷重規準による有効応力拡大係数範囲 最大荷重
最小荷重 き裂関口荷重 き裂関口比
最大荷重時の応力拡大係数 最小荷重時の応力拡大係数 き裂開口荷重時の応力拡大係数 き裂長
試験片幅 試験片板厚 形状係数 材料定数
(1.3)
(1.4) (1.5)
を提案した口 この提案以来、 種々の研究が行われ、き裂の停留現象を除き、長いき裂の疲労き裂 伝播挙動は(1.3)式で定量的に表現できることが明らかとなった。 また、 数結品粒程度の大きさの 微小き裂に対しても、(ムKeff)thより大きい場合には(1.3)式が成立することを城野ら4)は報告し ている。 そして、現時点では、(ムKeff)thを材料固有の抵抗値とした修正Paris-Elber則
表= C2{ムlÇfj一同川2}
(1.6)が、 最も信頼のある疲労き裂伝播則であると世界的に認知されている。
しかしながら、 ムKeffがなぜ疲労き裂伝播速度のパラメーターとなり得るのかその物理的意 味については明らかにされていないロ また、 この(ムKeff)thは、 材料固有の抵抗値であると多く の研究者は考えているが、(ムKeff)thが存在するか否かについては現在なお、 諸説がある。 菊川 ら5)は、(ムKeff)thを挟む2段2重繰り返し荷重下における疲労き裂伝播試験を実施し、 この場合 (ムKeff )th以下で、もき裂が進展し、 変動荷重下では(ムKeff)thが消失すると主張している。 また、
西谷ら6)は、 負荷過程でき裂が関口している荷重範囲と除荷過程でき裂が開口している荷重範囲 が異なることを指摘し、 除荷過程のその荷重範囲に対応する応力拡大係数範囲を適用するとき裂 の停留現象は現れず、下限界値は存在しないとしているD さらに、 平野ら7)は、(ムKejf )thは非常 に小さい値であり、(ムKeff)thそのものが存在しないことも考えられると報告している。 以上のこ とから、 ムKeffが疲労き裂伝播速度を律する真のパラメーターであるか否か疑問が生じてくる。
このような疲労き裂伝播に関する研究の歴史背景も踏まえて、 き裂先端部の塑性挙動に着目し た信頼性の高い疲労寿命評価法の確立を目指す。
1.3
本論文の構成
本論文は、 き裂先端部の塑性挙動に着目したき裂の発生から伝播までの統一理論体系による疲 労寿命評価法の確立を目的としており、 7章から構成されている。
第1章は、 緒論であり、 本研究の背景、 目的、 本論文の構成について述べる。
第2章では、 疲労き裂伝播過程における 1サイクノレ中のコンブライアンス変化についてき裂開 閉口挙動および弾塑性挙動と結びつけて考察し、 疲労き裂伝播速度を律する新しいパラメーター の提案を行い、 このパラメーターを計測するための試験システムおよびその決定法について言及 し、 さらに新たに提案する長いき裂に対する疲労き裂伝播則の有効性を実験的に検証するョ
第3章では、疲労き裂が欠陥や構造的不連続部などの応力集中場から発生・伝播するので、Dugdale モデルを拡張し、 残留応力場の問題も考慮した任意応力分布下における板厚貫通き裂の開閉口挙 動を推定できるき裂開閉口モデルを提案し 、 このモデ、ルを用いた疲労き裂伝播解析プログラムを 開発する。
第4章では、 長いき裂に対して第3章で開発した疲労き裂伝播解析プログラムが有効であるか 否か検討するとともに、 き裂の停留条件について考察する。 さらに、 第2章で提案した疲労き裂 伝播速度を律するパラメーターの物理的意味についても明らかにするつ
第5章では、 残留応力場においても第2章で提案したパラメーターが疲労き裂伝播速度を律す るパラメーターとなり得るか否か、 また、 第3章で開発した疲労き裂伝播解析プログラムにより
残留応力場における疲労き裂伝播挙動を推定可能か否か検討する。
第6章では、 切欠底部から発生-伝播するき裂に対して、 まず微小き裂の疲労き裂伝播挙動を明 らかにし、さらに微視き裂に対しては有効荷重範囲が一定の場合、 き裂が最初の結品粒界に達す るまでは疲労被害を受ける塑性域先端位置は一定に保たれると仮定することにより、 長いき裂の 疲労き裂伝播則を用いて、 初期き裂の存在を仮定することなくき裂長さO状態からき裂成長曲線 を推定するアルゴリズムを提案し、 その有効性を確認する。
第7章では、 本研究の成果および、今後の課題について述べる。
参考文献
1)たとえば、 N. E. Frost and D. S. Dugdale : The propagation of fatigue cracks in sheet specimen, Journal of the Mechanics and Physics of Solid, Vo1.6, No.2, (1958) p.92
2) P. C. Paris and F. Erdogan : A Critic叫Analysis of Crack Propagation Laws,τÌans. ASME J. Basic Eng., 85, (1963) p.528
3) W. Elber : The Significance of Fatigue Crack Closure, ASTM STP-486, (1971) p.230
4)城野7宋1伊藤:微小予き裂材の疲労き裂進展とき裂開閉口挙動(高張力鋼HT-80の場合 ),日 本機械学会論文集(A編), Vo1.51, No.471, (1985) p.2554
5)菊川?城野7近藤:低K領域における変動荷重下の疲労き裂進展挙動と進展速度の評価法1日 本機械学会論文集(A編), Vo1.47, No.417, (1981) p.468
一司、圃圃圃・
6)西谷?陳:除荷弾性コンブライアンスに関する一考察. 日本機械学会論文集(A編). Vo1.51.
メ0.465, (1985) p.1436
7)平野7石井?小林‘中沢:超音波法によるSC�'v1435鋼の疲労き裂進展特性の評価、 白木材料学
会論文集: Vo1.32, �0.356) (1983) p.542
第2章
き裂先端部の塑性挙動に着目した疲労き裂伝播則
2.1
緒言
疲労き裂は、 自身の高応力/ひずみ集中による引張塑性変形領域内を進展するため、き裂面内に 残留引張変形層が形成される。 そのため、負荷条件が高応力比である場合や過大荷重が作用した 直後を除けば、たとえ引張繰り返し負荷を与えた場合でも最小荷重時にき裂が閉口する。 この現 象は、Elber 1)によって実験的に確認され、弾性学的に応力特異性が現れるき裂関口荷重以上の荷 重振幅に対応する有効応力拡大係数範囲ムKeffを、P紅is員IJ ((1.2)式) 2)のムKと置き換えた疲労 き裂伝播則 ((1.3)式)が、現時点では最も疲労き裂伝播挙動を定量的に表現できると一般に考えら れている。 しかしながら、ムKeffがなぜ疲労き裂伝播速度のパラメーターとなり得るのかという 物理的意味は必ずしも明らかにされていない。 また、荷重振幅を漸減した場合、長いき裂に対し て低ムKeff領域で、は疲労き裂伝播速度が急激に減少し、ある値以下では事実上き裂が停留すると いう現象が認められる。 そして、このき裂進展の下限界条件 (ムKeff)thを材料定数とみなすのが 一般的取り扱いとなっているが、(ムKeff)tれが存在するか否かについては現在なお諸説がある。
一方、西谷ら3) , 4)は、負荷過程でき裂が関口する荷重と除荷過程でき裂が閉口する荷重が異な ることを、菊川ら5)が提案した除荷弾性コンブライアンス法を改良した計測により指摘した。 そし て、き裂関口荷重にかわりき裂閉口荷重を用いた有効応力拡大係数範囲ムK?: を定義し、eff<'!"N_"B':iI.../, ムK?:'->oJ.. l.eff が疲労き裂伝播速度を律するパラメーターであると主張し、イ氏ムK:�領域でもstage 11と同じ疲eff 労き裂イ云播則が成立することを示した。 しかしながら、彼らが計測したコンブライアンス変化曲 線をみると計測精度上問題があり、 またコンブライアンス変化がどのような物理的現象により生 じているのかほとんど議論せずにき裂閉口荷重を決定しており、彼らの結論には問題がある。
そこで、本章では、 まず疲労き裂伝播過程における 1サイクル中のコンブライアンス変化がど のような物理的現象により生じているかをき裂開閉口挙動および弾塑性挙動と結びつけて考察し
、疲労き裂伝播速度を律する新しいパラメーターの提案を行う。 そして、このパラメーターを定 義するには疲労き裂伝播過程における1サイクノレ中の微小なコンブライアンス変化を計測する必 要があることから、菊川らあるいは西谷らの除荷弾性コンブライアンス法に使用されている引算 回路に改良を加え、高精度で、微小なコンブライアンス変化を計測できるようにした。 また、 この 制御を人為的に行うには多大な労力を要すること、き裂長もコンブライアンスから計測できるこ とから、疲労き裂伝播試験をパーソナノレ・コンピューターを使用して全自動で行えるシステムを開 発した。 さらに、従来の除荷弾性コンブライアンス法によるき裂開閉口荷重の計測法の問題点を 指摘するとともに、 き裂開閉口荷重およびここで新たに提案する再引張塑性域形成荷重(RPG荷 重)の決定法について検討した。 そして、種々の疲労き裂伝播試験を実施し、ここで提案する疲労 き裂伝播則の有効性を実験的に検証した。
2.2
き裂材の1サイクル中におけるコンフライアンス変化の巨視的考察
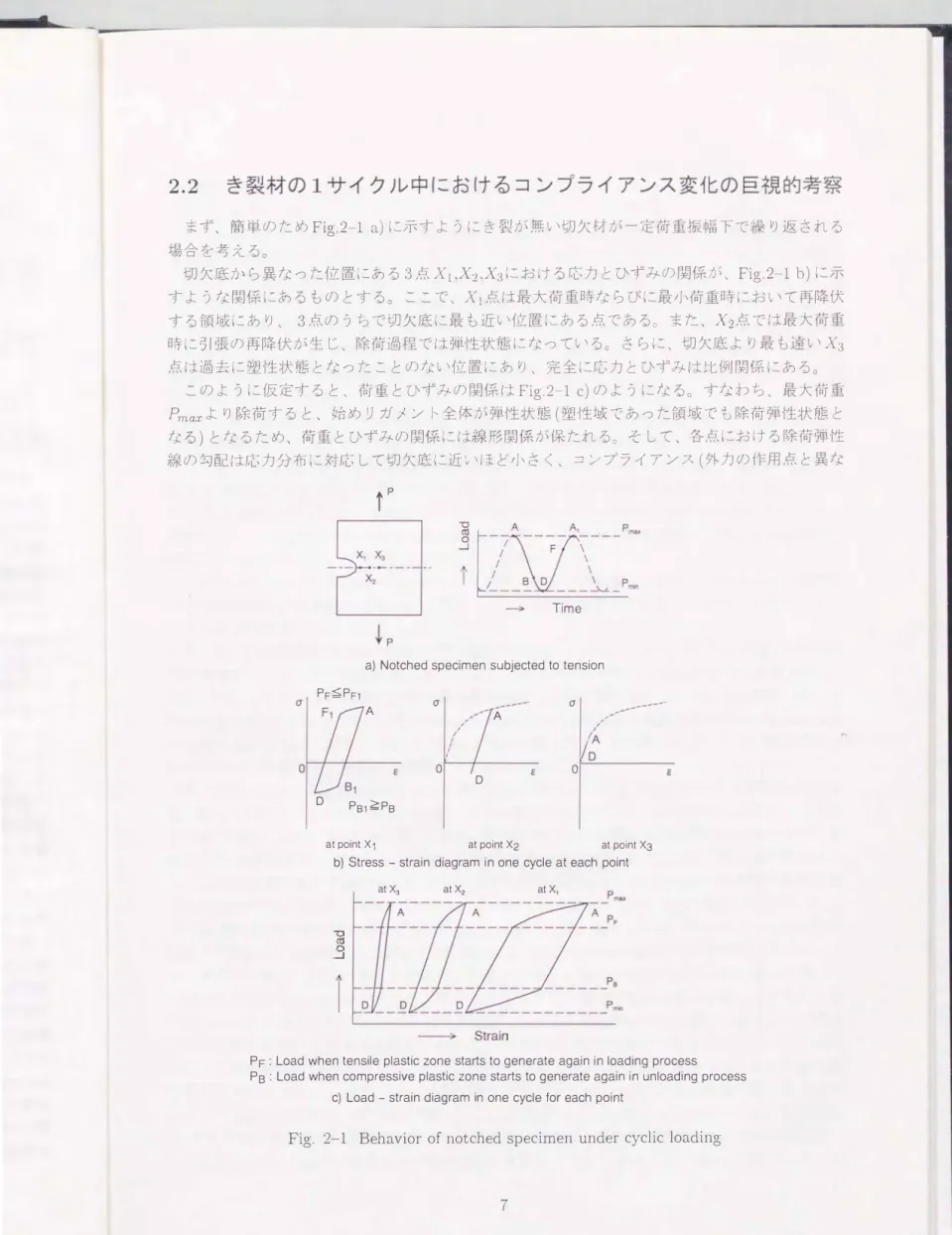
まず、簡単のためFig.2-1 a)に示すようにき裂が無い切欠材が一定荷重振幅下で、繰り返される 場合を考える。
切欠底から異なった位置にある3点X1、X2、X3における応力とひずみの関係が、Fig.2-1 b)に示 すような関係にあるものとする。 ここで、 X1点は最大荷重時ならび、に最小荷重時において再降伏 する領域にあり、 3点のうちで切欠底に最も近い位置にある点であるD また、X2点で、は最大荷重 時に引張の再降伏が生じ、 除荷過程では弾性状態になっている2 さらに、 切欠底より最も遠いX3 点は過去に塑性状態となったことのない位置にあり、 完全に応力とひずみは比例関係にあるコ
このように仮定すると、 荷重とひずみの関係はFig.2-1 c)のようになる。 すなわち、 最大荷重 Pmωより除荷すると、始めリガメント全体が弾性状態(塑性域であった領域でも除荷弾性状態と なる)となるため、 荷重とひずみの関係には線形関係が保たれる。 そして、各点における除荷弾性 線の勾配は応力分布に対応して切欠底に近し\ほと。小さく、 コンブライアンス(外力の作用点と異な
↑P
一� Time
a) Notched specimen subjected to tension PF三五PF1
σ| A σ
A
σ
《勾 / 〆〆 〆
D E 。
E 。
D PS1孟Ps
at point X 1 at point X2 at point X3
b) Stress - strain diagram in one cycle at each point
at X3 at X2 atX1
仁左--三五三三
て
」co u コ
一一一→Strain
PF: Load when tensile plastic zone starts to generate again in loading process PB : Load when compressive plastic zone starts to generate again in unloading process
c) Load -strain diagram in one cycle for each point
Fig. 2-1 Behavior of notched specimen under cyclic loading
『盲目回・ー
る位置の変位あるいはひずみと外力の比で影響係数と呼ばれることもあるが、本論文では、岡村6) に倣い一般化されたコンブライアンスという意味で以後単にコンブライアンスと呼ぶことにする) は大きくなる。 さらに除荷すると、 切欠底部に圧縮の再降伏域が形成される。 圧縮降伏域内にあ るX1点では当然ひずみ変化は大きくなるが、 圧縮降伏域外にあるX2およびX3点も応力の再配分 のためひずみ変化は大きくなる。 したがって、 切欠底部に圧縮降伏域が形成されると、 X1 、X2、X3 点のコンブライアンスはリガメント全体が弾性域にある状態のそれよりも大きくなる。 すなわち、
リガメント部に塑性域が形成されると見掛けのリガメントが小さくなり コンブライアンスは大 きくなる。 そして、コンブライアンスが変化し始める時期は各点とも同じ時期(厳密には弾性波、
塑性波の速度により切欠底部に近い場所ほど速い時期にコンブライアンスが変化するが、 この影 響は無視できる)である。
次に、最小荷重Pminより再負荷すると、始めリガメント全体が弾性状態となる。 き裂が入って いない状態を考えているのでリガメントは変化せず、除荷弾性過程と同じコンブライアンスとな り、一定に保たれる(厳密には荷重が大きくなるほど切欠半径が大きくなるので、除荷弾性過程と 負荷弾性過程ともコンブライアンスは一定にはならず、切欠底近傍では負荷が大きいほどコンブ ライアンスは小さくなるが、 弾性範囲で、の変形は微小なので、この鈍化の影響は無視する)。 さらに 負荷すると、 切欠底部に再引張降伏域が形成される。 そのため、 除荷過程と同様、引張塑性域が 形成されると各点のコンブライアンスは大きくなる。
上述のように、 どの点においてもコンブライアンス変化は同様となるが、 切欠底部より離れる ほど除荷過程と負荷過程の差が小さくなる。 また、塑性域が形成されると見掛け上リガメントが 小さくなる効果があるD
そこで、 次に巨視的観点から疲労き裂伝播過程における 1サイクル中に生じるき裂材のき裂開 閉口挙動をとらえ、 その挙動に対応してどのようなコンブライアンス変化が生じるか考察する。
Fig.2-2は、 1サイクル中に疲労き裂先端近傍でどのような挙動が現れているかを模式的に示した 図であるD また、Fig.2-3は、き裂前方の任意の点における荷重とき裂線垂直方向のひずみの巨視 的な関係を示した図である。 ここで、材料は完全弾塑性体で、き裂線上においてき裂線垂直方向 にしか応力が作用しない単軸応力状態にあるものと仮定する。
最大荷重Pmω時(Fig.2-2 a):A)にはき裂は完全に関口し、き裂先端部には再引張降伏域(塑性 域寸法ω1)が形成されているものとする。 この状態より除荷すると、き裂前方のリガメント全体 が弾性状態(ω1の部分は除荷弾性域)となる口 弾性状態では、き裂面の変位増分は小さいので、除 荷するとき裂が開口したままき裂先端にはき裂自身の応力集中のため圧縮の塑性域が形成され る。 この圧縮塑性域がき裂先端に形成される時点の荷重(Fig.2-2 b ):B)を再圧縮塑性域形成荷重 (Re-Compressive Plastic Zone's Generated Load)とし\う意味からRCPG荷重と名付ける。 Pmαュー からRCPG荷重に至る除荷過程では、 Fig.2-1 a)の切欠材の場合と同様、 リガメント全体が弾性 挙動を示すから、 巨視的にはき裂前方の任意の位置でのひずみは荷重に対して線形的に変化し、コ ンブライアンスは一定になる。 そのため、荷重とひずみの関係は Fig.2-3のA→B の軌跡を描く。
RCPG荷重からさらに除荷すると、除荷とともにき裂先端で圧縮塑性域が成長し、 き裂面の変 位増分は大きくなる。 そのため、Elber 1)が指摘したように前段階までにき裂縁に取り込んだ残留 引張変形層の影響によりき裂が閉口し始める。 この時の荷重がき裂関口荷重Pcl(Fig.2-2 c) :C)で あり、 圧縮塑性域寸法はω2となる。 この RCPG荷重から九lに至る除荷過程では、き裂先端で塑 性変形が成長するため、 リガメント全体が弾性状態となるPmはからRCPG荷重に至る除荷過程 よりひずみ変化は大きくなり(コンブライアンスが大きくなり)、 Fig.2-3上を B→Cへと変化する (ひずみ計測位置が完全に弾性域で、あっても塑性域の形成による応力再配分のためひずみ変化は
きくなる)。 もし、RCPG荷重以後の除荷過程でき裂関口が生じなければ、Fig.2-3上をB→C→R
g) Maximum load A1
A A, Pm�
/ふ FI \
/ B \ I r 、
/ c\ E I
乙一一人区一一-L-Pmlf1
Ti門1e
℃CO」
a) Maximum load A
りRe-tensile plastic zone's generated load (RPG load) F
一一歩
b) Re-compressive plastic zone's generated load (RCPG load) B
σ y σ y
仏』
e) Crack opening load E d) Minimum load 0
c) Crack closing load C
Fig. 2-2 Crack closure behavior in one cycle for cracked body during fatigue crack propagation
A A, Pmax
/ふ F-/ーIふ{
/司Efんど 乙一一λ rd/___'� _ Pmlf1
Time
刀のO」
/
/|ノ/ /〆
/
/Aイ //
-一一一一 -
P叩dグI A,
F ノ〆/
Q �/ ノ
R
_- ノうiγ/
め'//_ �χ Jf//
V/<øシ / 1y /
/
/}' /p
mm / /- / /クン /
11/づっ77/ o 一-
E 1 E 2
一一一歩Strain
Fig. 2-3 Schematic diagram of load - strain hys
teresis curve in one cycle for cracked body d uring fatigue crack propagation
E 3 一一→券
刀伺O」 小il--
と移動する口
九Iからさらに除荷すると、き裂閉口域 がき裂内部に成長する。 Pmωから九lに 至る除荷過程では、き裂は完全に開口し ているので実き裂部で荷重を受け持たな いが、 この過程ではき裂閉口域で圧縮荷 重の一部を受け持つことになる。 そのた め、除荷とともに見掛け上リガメントが 増加し、 ひずみ変化が小さくなり(コン ブライアンスが小さくなり)、Fig.2-3の BCR曲線から外れ、C→Dの軌跡を描き 最小荷重Pmin(Fig.2-2 d):D) に至る。 し たがって、BCD曲線の変曲点がき裂閉口 荷重九lとなる。 九lからPmin�こ至る除荷 過程では、き裂面も荷重分担するため圧 縮塑性域の成長速度はRCPG荷重から 九lに至る除荷過程より遅くなる。 そし て、負荷条件によってはき裂面にも圧縮 塑性域が形成される。 コンブライアンス
変化におよぼすき裂閉口域の成長の影響(見掛け上リガメントが大きくなる)よりも圧縮塑性域の 成長の影響(見掛け上リガメントが小さくなる)の方が大きくなると、 コンブライアンスが大きく なりCD聞にも変曲点が生じることになる。
Pminから負荷すると、 き裂閉口域およびリガメント全体が再び弾性状態となるコ また、 き裂閉 口部が応力集中源として作用するためき裂閉口域は容易に開口し、 負荷とともにき裂閉口域が小 さくなる。 そのため、 負荷とともに荷重を受け持つ領域が減少し、 コンブライアンスは大きくな るつ ただし、 C →Dの除荷過程では圧縮塑性域が存在していたが、 この負荷過程ではき裂閉口域 およびリガメント全体が弾性挙動をするため、C →Dの除荷過程よりコンブライアンスは小さく なる。その結果、Fig.2-3上をD→Eの軌跡を描く。そして、ついにはき裂は完全に開口する( き裂 関口荷重九p(Fig.2-2 e):E))ロ き裂が開口した時点において、 それまでき裂先端が応力集中源とし て作用しないのでリガメント全体は弾性状態にあり、 き裂先端には圧縮応力が作用する場合も考 えられる。
Popからさらに負荷すると、1サイクルで、伝播するき裂進展量は微小で、あるので、 この段階では リガメント全体が弾性状態に保たれていたA→Bの除荷過程におけるリガメントとほぼ同じ大き さのリガメントとなり、 2.4節に示す応力分布におよぼすき裂尖鋭度の影響を無視すると、A→ B とほぼ同じコンブライアンスを示す。 そのため、 巨視的にはFig.2-3のABと平行なE→Fの軌跡、
を描く。Fig.2-2f)に示すように荷重Fでき裂先端に再び引張塑性域が形成される。 この荷重を再 引張塑性域形成荷重(Re-Tensile Plastic Zone:s Generated Load)という意味からRPG荷重と名 付ける。
RPG荷重PRPCからさらに負荷すると、負荷とともにき裂先端で引張塑性域が成長するためコ ンブライアンスは大きくなり、Fig.2-3上をF→Alの軌跡を描く口 AからAlまでの1サイクルにお いてき裂の進展量は微小で、あるのでAとAlはほぼ一致する。
2.3
塑性挙動を考慮した疲労き裂伝揺則の提案
2.2節において、き裂材の1サイクル中におけるき裂先端近傍に現れる挙動とコンブライアンス変
化について巨視的に考察した。 ここで、Fig.2-3中の一点鎖線で、示すように最小荷重(D点)から次 の負荷サイクノレがRPG荷重(F点)より低い最大荷重(Q点)しか作用しない場合を考える。2.2節の 考察より明らかなように、DF問はき裂関口からき裂開口の過程はあるものの全領域で完全に弾性 挙動を示し、F点より低い最大荷重(Q点)しか次に作用しなければ巨視的挙動としてはFig.2-3上 をD→E→Q→E→Dと繰り返すのみである。 したがって、 このような負荷サイクノレが繰り返され てもき裂先端部に塑性ひずみは蓄積されない。 き裂先端部に塑性ひずみの蓄積が生じなければ疲労 き裂は成長しないものと考えられるので、 RPG荷重(F点)以上の荷重がき裂を進展させる力とし て働くものと考えられる。 すなわち、 き裂進展力に対応する荷重振幅は、 負荷過程においてき裂先 端部に再引張降伏が生じ始めるRPG荷重PRPGから最大荷重Pmωに至る荷重振幅(Pmω-PRPC) となる。 なお、RPG荷重は豊貞ら7)が提案したC omsumingStressに対応するものであるが、2.2 節に示したような考察はなされていなし\。 そこで、 疲労き裂伝播速度を律するパラメーターとして 有効応力拡大係数範囲ムKRP (Effective stress intensity factor range correspond ing to the terms of appearing re-tensile plastic zoneの意味からこのように表す)を定義し、 以下に示す新しい疲労 き裂伝播則を提案する。
生=
dN C(ムKRP)m=
C(UムK)m『 (2.1)ただし、
ムKRP ニ(Pmω- PRPc)vwf(α/W)/t (2.2)
u =
Pmαx - PRPC Kmω-KRPc
(2.3) Pmαx -Pmin Kmω-Kmin
ここで、 dα/dN 疲労き裂伝播速度
ムKRP RPG荷重規準による有効応力拡大係数範囲
Pmαz 最大荷重
Pmiη 最小荷重
PRPC RPG荷重
U 塑性荷重比
Kmax 最大荷重時の応力拡大係数
Kmin 最小荷重時の応力拡大係数
KRPc RPG荷重時の応力拡大係数
α き裂長
W 試験片幅
試験片板厚 f(α/W) 形状係数
C‘m 材料定数
なお、Laird 8)のき裂進展モデルから考えられるように除荷過程でき裂が進展するものと仮定す ると、 除荷過程において再圧縮降伏域が形成される荷重以下の荷重振幅がき裂進展力に対応する と考えることもできる。 しかしながら、この過程ではき裂が閉口するので、き裂先端の応力特異 性が弾性学的に保証されず、応力拡大係数による整理は意味を持たないことになる。
2.4
RPG荷重の計測法
2.4.1 疲労試験システムの開発
2.2節において、疲労き裂の1サイクノレ中におけるコンブライアンス変化について巨視的に考察 し、き裂前方の任意の位置における荷重とひずみの関係がFig.2-3に示すようになることが判明し た。 しかし、実際にひずみゲージを用いて計測すると荷重一ひずみ曲線上で負荷過程と除荷過程の 差は非常に小さく、 通常の方法では両者を区別することは困難である。
負荷過程と除荷過程の差を明確にするためには、 ひずみ出力を増幅すればよい。 しかし、 単に 増幅するとすぐにひずみ増幅器の基準電圧を越えるためあまり増幅率は上げられない。 そこで、
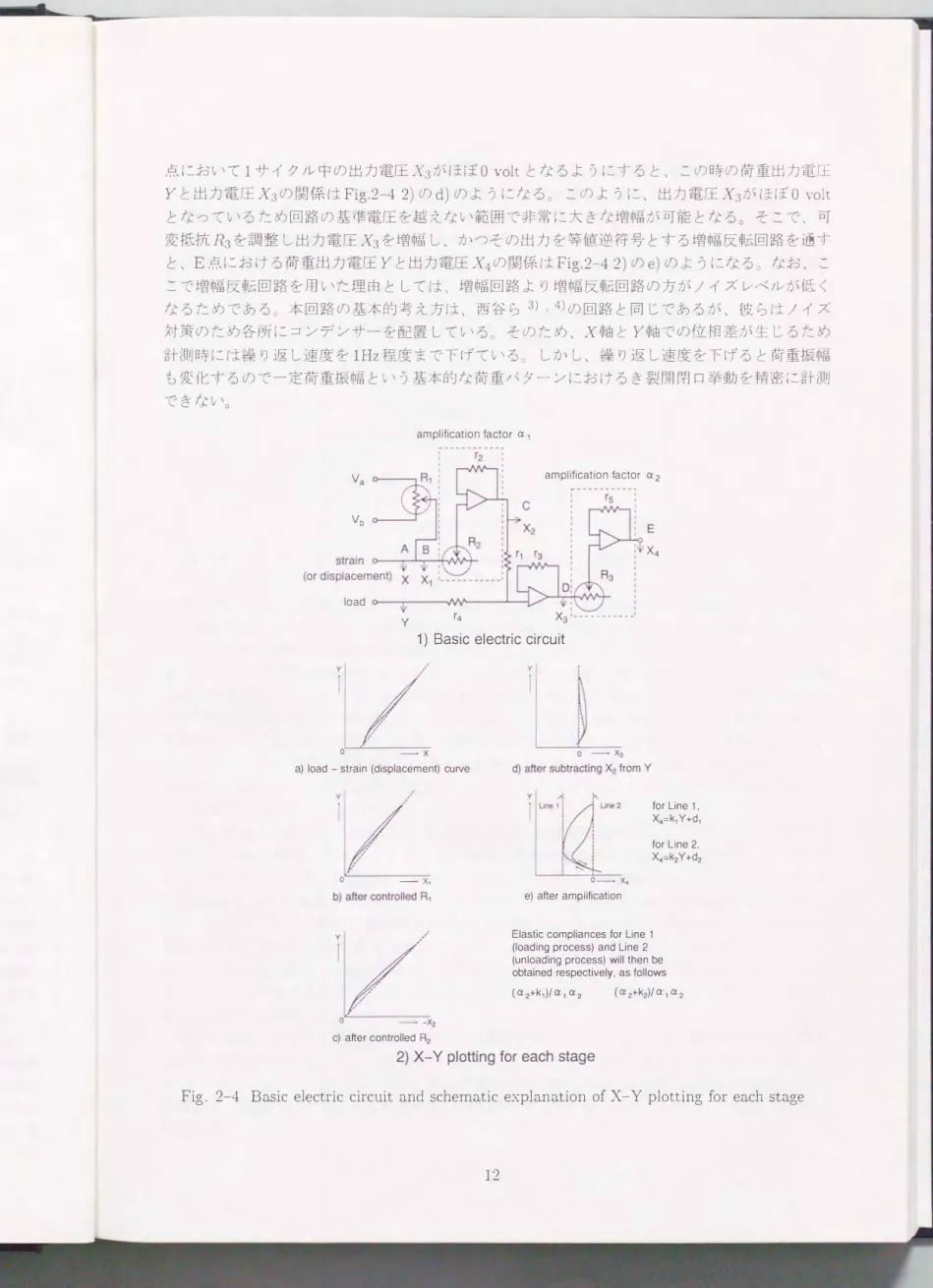
菊川ら5)が提案した除荷弾性コンブライアンス法で用いた引算回路を参考にし、 彼らの回路より も高倍率に計測可能な回路を作製した口 Fig.2-4に作製した引算回路の基本回路図ならびに原理を 示す。
Fig.2-42)のa)は、 荷重出力電圧(Y)とひずみ出力電圧(X)の関係を示した図であり、Fig.2-3 に相当する。 図中の点線は除荷弾性線を示す。 Fig.2-42)のb)に示すように、除荷弾性線が原点 を通るように可変抵抗Rlを調整し、ひずみ出力電圧にある電圧を加える( 回路上B点の電圧はX1 となる)。 さらに、 可変抵抗R2を調整し除荷弾性線の勾配がlとなるよう出力電圧X1を増幅し、
かっその出力を等値逆符号とする増幅反転回路を通すと、 C点における荷重出力電圧Yと出力電 圧X2の関係はFig.2-42)のc)のようになるc その後、 出力電圧X2と荷重出力電圧Yを加え、 D
点において1サイクル中の出力電圧X3がほぼo voltとなるようにすると、 この時の荷重出力電圧 Yと出力電圧X3の関係はFig.2-42)の d)のようになるc このように、 出力電圧X3がほぼo volt
となっているため回路の基準電圧を越えない範囲で非常に大きな増幅が可能となる。 そこで、 可 変抵抗R3を調整し出力電圧X3を増幅し、 かっその出力を等値逆符号とする増幅反転回路を通す と、 E点における荷重出力電圧Yと出力電圧X4の関係はFig.2-42)のめのようになる。 なお、 こ こで増幅反転回路を用いた理由としては、 増幅回路より増幅反転回路の方がノイズレベルが低く なるためである。 本回路の基本的考え方は、 西谷ら3)守4)の回路と同じであるが、 彼らはノイズ 対策のため各所にコンデンサーを配置している。 そのため、 X軸とY軸での位相差が生じるため 計測時には繰り返し速度を1Hz程度まで下げているD しかし、 繰り返し速度を下げると荷重振幅 も変化するので一定荷重振幅とし\う基本的な荷重ノξターンにおけるき裂開閉口挙動を精密に計測 できない。
amplification factor α1
Va Vb
load Y
amplification factor α2
r4 x3 '- ー ー ー ー - - - -
X4
1) Basic electric circuit
a) load - strain (displacement) curve
。 一一- x,
i
c) after controlled R2
i
。一一一. X4
e) after amplification
forしine 1,
X4=k, Y+d,
for Line 2,
X4=k2Y+d2
Elastic compliances for Line 1 (Ioading process) and Line 2 (unloading process) will then be obtained respectively, as follows (α2+k,)1α1α2 (α2+k2)1α1α2
Fig. 2-4 Basic electric circuit and schematic explanation of X-Y plotting for each stage
ー�園田ー
ここで、少なくともFig.2-4 1)に示す可変抵抗R1およびR2は最適値に調整する必要があるコ し かしながら、この作業を手動で行うとその調整に多大な時間ならびに労力を要する。 そこで、 可 変抵抗の調整に関しては全てステッピングモーターを直結し、Fig.2-4 2)のa)から e)の出力が得 られるよう可変抵抗値の制御をパーソナル・コンピューターを用いて行うことにした。 R1および R2の値は、以下に示す関係式により制御できる。 また、 R3は回路の基準電圧を越えないよう制御
すればよい。
Rl = α- b + fdRR2一
v
(α-b十fdRR2)2- 4fdRR2 2fdR2R2 C ed
ここで、 R : Rl部の可変抵抗の全抵抗値
α =Var・2r3/rl b =九九月 /rl
C ニア2r3/ア1 d =r2/凡
e,J : Fig.2-4 2)のa)でY = eX + fとなる直線の係数
(2.4) (2.5)
Fig.2-4 1)に示す引算回路のノイズレベルや回路に入力する荷重およびひずみの出力電圧のノ イズレベノレが高いと、このノイズまで大きく増幅されることになる。 ノイズ対策としては、 西谷 らが採用したように回路にコンデンサーを組み込むことが一般的であるが、増幅するひずみ出力 電圧側の回路にコンデンサーを組み込むと荷重出力電圧との間に位相差が生じ、 高繰り返し速度 下における疲労試験では意図した計測ができなくなる。 そこで、以下に示すノイズ対策を施した。
すなわち、 まず引算回路を完全にシールドしノイズレベノレを最小限に抑えた。 また、ひずみ増幅 器が有する固有のノイズレベルを相対的に低下させるために、最適なレンジ(計測可能な最小レン ジ)で計測できるようひずみ増幅器のレンジおよびオフセット量をパーソナノレ・コンピューターで 制御できるようにした。 さらに、2.2節の考察より明らかなように ひずみ変化はき裂先端に近い ほど大きくなるのでコンブライアンス変化を精度よく計測できる。 そのため、き裂前方に密にひ ずみゲージを貼付し、き裂の進行に応じてパーソナル・コンヒ。ューターを用いて最適なひずみゲー ジを自動的に選択できるようにした。
一方、荷重とき裂前方の任意の点におけるひずみ、荷重点変位あるいはき裂関口変位の関係よ り得られる除荷弾性コンブライアンスは、 試験片形状が定まればき裂長さの関数として与えら れるので、あらかじめこの関係をビーチマーク法により求め、 除荷弾性コンブライアンスを計測 すればon-line でき裂長さが決定できる。 この場合も、 Fig.2-4 1)に示す引算回路を用いると微 小なコンブライアンス変化を高精度で計測できる(Fig.2-42)のB)rvC)の増幅率を旬、 D)rvE)の 増幅率をα2とすると、 E)の段階でコンブライアンスがんで、ある場合、A)のコンブライアンスは (α2+わ)/α1α2となり、αlα2倍程度コンブライアンス変化を拡大して計測できる)。 また、パーソ ナル・コンピューターを使用してファンクション.ジェネレーターを制御することにより、任意の波 形が与えられる試験システムとした。
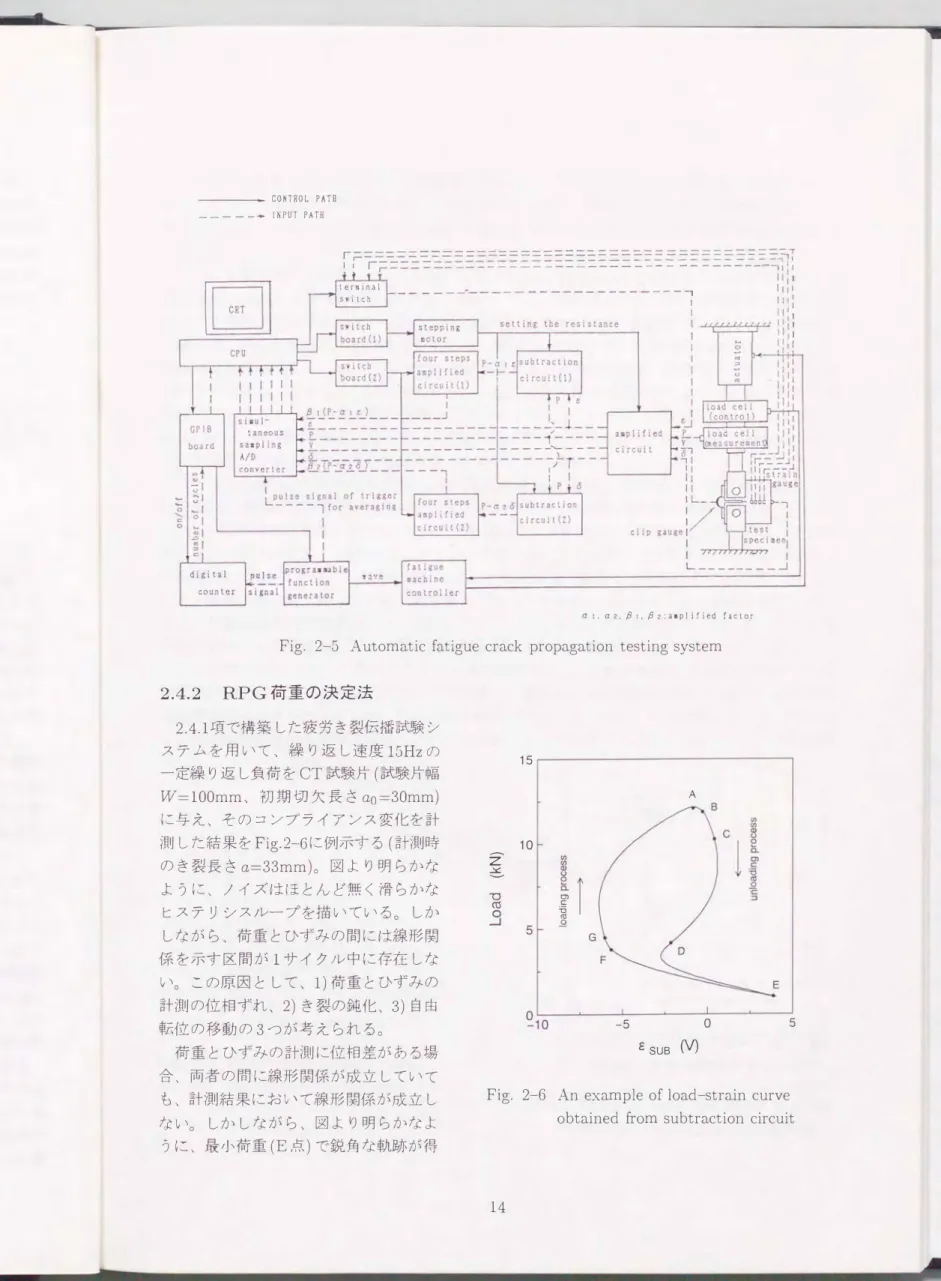
新たに構築した疲労き裂伝播試験システムの概要を Fig.2-5に示すo なお、個々のデータの取り 込みに時間差が生じないよう8点同時サンプリングA/Dコンパーターを介してデータをパーソナ ル・コンビューターに入力した。 また、データ取り込みに際しては その開始時期を発振ノ勺レスと 同期させ、A/Dコンパーターの制御命令によりデータのアベレージングを行い、 非同期ノイズを 除去した。
-
COHTROL PATH -一一 一一- INPUT PATH
「戸=二二----二二=二二二二二二=二二二二二=二二二ご二二二二二二二__二三1寸 一一一一一一一 一一一一 一一一一一一一一一 一一一一一一 一一一--,!I 11 I戸二二二二二二一一一一一一一一一一一一一一一一一一ー 一一一一一一一一一一,ì :1
11;1
l日i
lerminal L_一 一一一一'一一一一一一一一一一一一一一一一一一一-, 11 i 1STlilch I 1 111:
1 111;
1--'.///ノ〆〆" /1'r1 11; l---r 11 ;1
I
I
�l
: : '!α1. α2.β1.βz;aaplified facto_r
Fig. 2-5 Automatic fatigue crack propagation testing system
2.4.2 RPG荷重の決定法
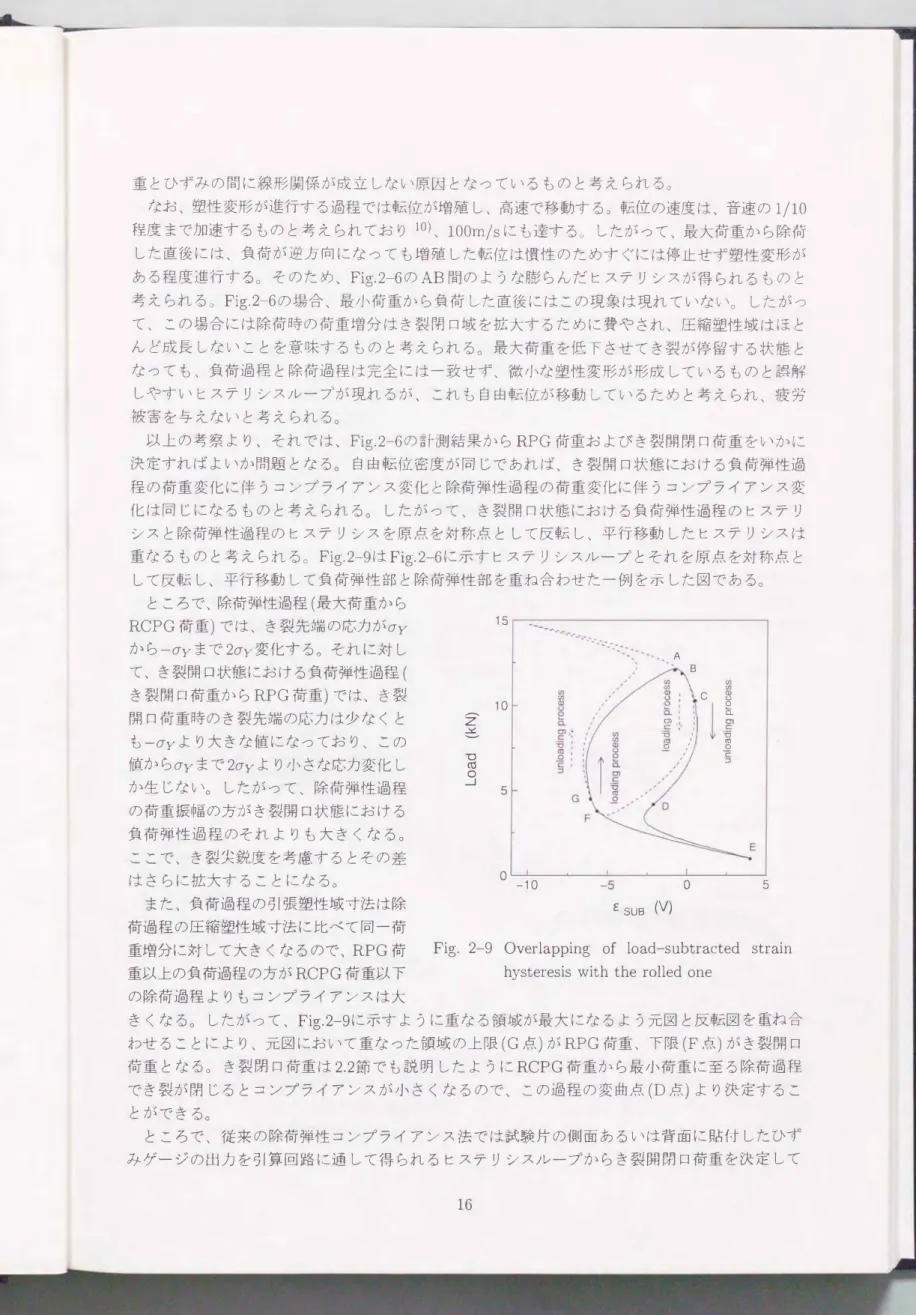
2.4.1項で構築した疲労き裂伝播試験シ ステムを用いて、繰り返し速度15Hzの 一定繰り返し負荷をCT試験片(試験片幅 W=100mm、初期切欠長さαo=30mm) に与え、そのコンブライアンス変化を計 測した結果をFig.2-6に例示する(計測時 のき裂長さα=33mm)。 図より明らかな ように、 ノイズはほとんど無く滑らかな ヒステリシスルーフを描いている。 しか しながら、荷重とひずみの聞には線形関 係を示す区聞 がlサイクノレ中に存在しな い。 この原因として、1)荷重とひずみの 計測の位相ずれ、2) き裂の鈍化、3)自由 転位の移動の3つが考えられる。
荷重とひずみの計測に位相差がある場 合、 両者の問に線形関係が成立していて も、計調IJ結果において線形関係が成立し ない。 しかしながら、 図より明らかなよ うに、最小荷重(E点)で鋭角な軌跡が得
15
A
Z
二zz 10
B
J i1/
f
G F�1õ
-5 0εSUB 0/)
B
C。
官 Eコ二
5
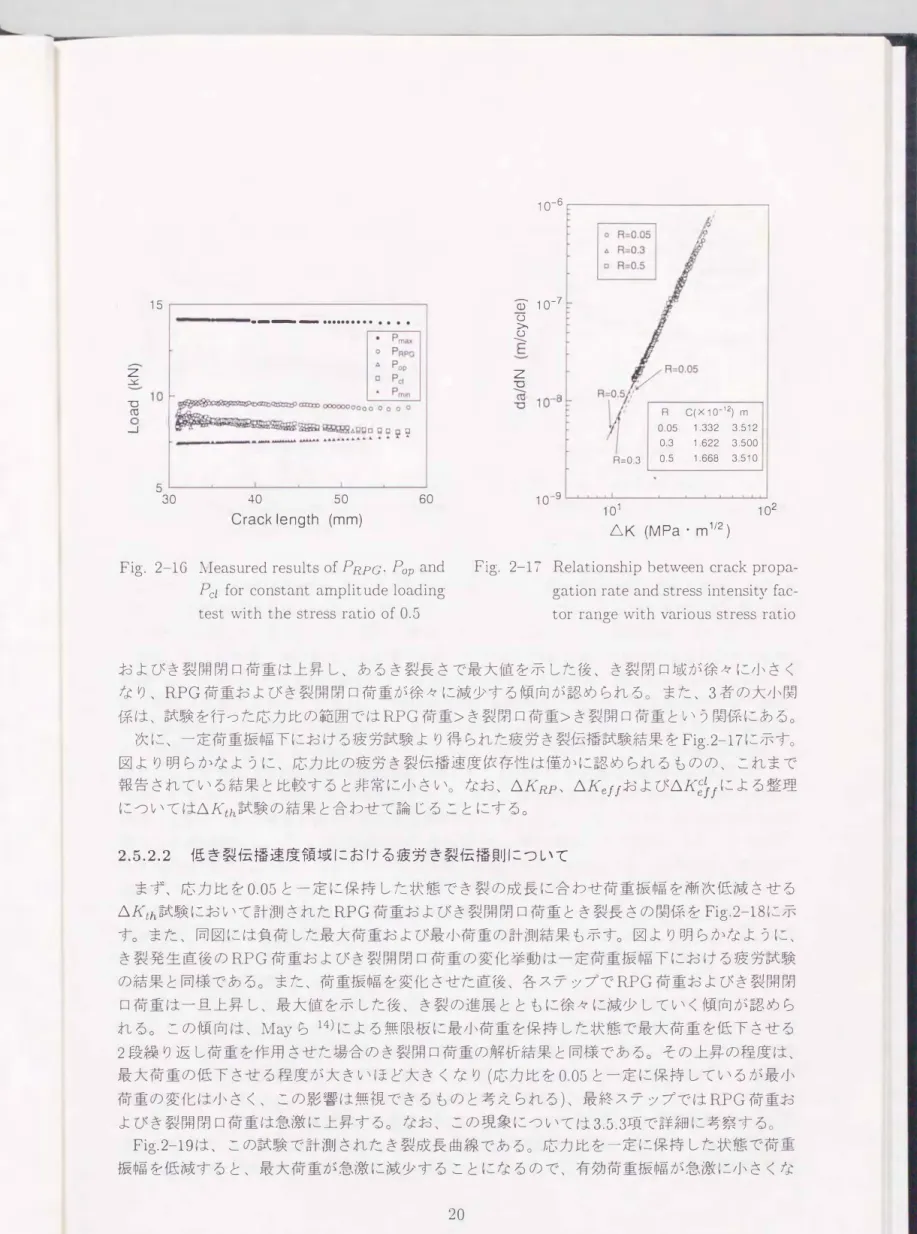
Fig. 2-6 An example of load-strain curve obtained from subtraction circuit