研 究論文
電 気 油 圧 サ ー ボ 系 に お け る 自 己 調 整 フ ァ ジ ィ コ ン ト ロ ー ラ の ル ー ル 数 低 減 化 法*
野
口
真
児**,
谷
住
和
也**,
鎌
野
琢
也***
鈴
木
茂
行***,
安
野
卓***
Reduction
method of control rules in self-tuning
fuzzy controller
for
positioning
system of electro-hydraulic
servo system
Shinji NOGUCHT, Kazuya TANIZUMI,
Takuya KAMANO
Takayuki
SUZUKI, Takashi YASUNO
In this paper,
the application
of a self-tuning
fuzzy control method for electro-hydraulic
servo systems
is described.
As is well known, fuzzy controllers have the ability to control a system in uncertain
or
un-known environments.
However,
the control performance
depends on the fuzzy rules. Therefore,
suitable
control rules are required.
A self-tuning fuzzy controller
(STFC) , in which the fuzzy rules for the
combi-nation of all input signals are automatically
adjusted by the tracking error, has been proposed . Although
the STFC is effective for improving the tracking performance,
it requires many control rules. To reduce
the number of fuzzy rules, the ring- and separate-type
STFCs are proposed.
In the ring-type
STFC, the
fuzzy rules are described as a combination
of two input signals.
The fuzzy rules in the separate-type
STFC are used to adjust the gain of each input signal. The effectiveness of the proposed fuzzy controllers
for improving the tracking performance
is demonstrated
by an experiment of boom telescoping axis of an
aerial working platform.
Key words: Construction
machinery,
Fuzzy control,
Self-tuning
method, Learning control,
Fluid power
system, Mechatronics
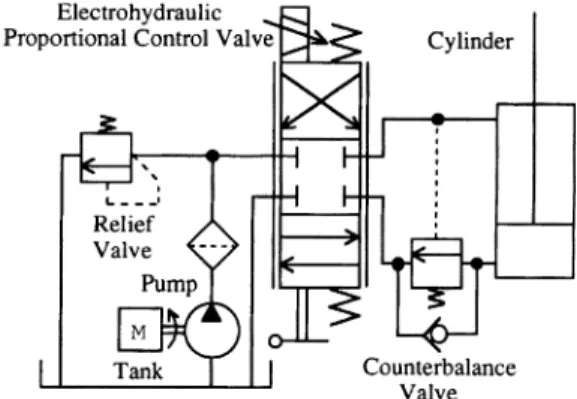
1. ま え が き 土 木 ・建 設工 事 な どに欠 か せ な い建 設 機 械 は一 般 に 大 型 で 重 負荷 に使 用 され るた め,ア ク チ ュエ ー タ に は 小 型 高 出 力 が 可能 な油 圧 ア クチ ュエ ー タが 用 い られ て い る.し か しな が ら,そ の 特性 は制 御 弁 の不 感帯 や片 ロ ッ ドシ リ ンダ の非 対 称 性 お よび摩 擦 な ど に よ り強 い 非 線 形 性 を有 して い る.ま た,建 設 機 械 は通 常風 雨 を 伴 う厳 しい作 業 環 境 下 で 用 い られ る た め,複 雑 な操 作 は オペ レー タ に よ り強 い負 担 を 強 い る こ と とな る.更 に,熟 練 オペ レ ー タ不 足 に よる若 年 オ ペ レー タ の増 加 や 女性 オペ レ ー タの 進 出 が社 会 情 勢 として 定 着 して い る現 在,建 設 機 械 の 性 能 お よび安 全 性 の向 上 に加 え て 自動 化,高 機 能 化,操 作 の 簡 略 化 が必 要不 可 欠 とな っ て い る.特 に,オ ペ レー タが 車輌 上 の キ ャ ブ内 また は 車輌 外 か ら操 作 す る ク レー ンや パ ワ ー シ ョベ ル な どの 他 の建 設 機 械 とは異 な り,高 所 作業 車 で は それ 自体 が 作 業 台 の オペ レ ー タ に とって 作 業環 境 の一 部 とな るた め,操 作 性 の 向上 が 作 業 環 境 の 改善 に直 結 す る.こ れ らの 要 求 を実 現 す るた め に は,油 圧 ア ク チ ュエ ー タ の 非 線形 性 を十 分 抑 圧 し,オ ペ レー タ の指 令 に遅 れ な く 追 従 す るサ ー ボ シ ス テム を構 成 しな け れ ば な ら ない. この よ うな観 点 か ら油 圧 サ ー ボ シス テ ム の性 能 向 上 を 目的 と して,建 設機 械 に適 応 制 御1)2),外乱 オ ブザ ー バ3)∼5),ファ ジ ィ制 御6)7)などの 制 御 手 法 を適 用 した例 が 報 告 され て い る.適 応 制 御 は制御 対 象 の線 形 性 を前 提 と して い る た め,制 御 性 能 や ロバ ス ト性 にお い て 良 好 な結 果 が必 ず し も得 られ て い な い.外 乱 オ ブザ ーバ は運 動 方程 式 か ら摩 擦 を含 む 外 乱入 力 を推 定 す る こ と に よ り応 答特 性 の改 善 を図 って い る.し か し,推 定 に は近似 微 分 を 川 い るた め外 乱抑 圧 特 性 に は限 界 が あ り, 使 用 す る フ ィル タ時 定 数 は実機 の動 特 性 お よび検 出器 * 平成9年4月21日 原稿 受 付 ** (株)タダ ノ技 術 研 究 所 (所在地 〒761-03香 川 県高 松 市 林 町2217-13) *** 徳 島大 学 (所在 地 〒770徳 島 市南 堂 三 島 町2-1)786 油 圧 と 空 気 圧 の高 周 波 雑 音 を考慮 して適 切 に設 定 しな けれ ば な らな い.特 に,経 済 性 の 面 か らサ ン プ リン グ周期 を短 くで きな い場 合 に問題 とな る. 一 方,フ ァ ジ ィ制御 は制 御 対 象 の厳 密 な 数学 モ デ ル を必 要 とせ ず,熟 練 オペ レ ー タの 知 識 や 経験 に基 づ き 作 成 され た 「if∼then∼」形 式 の言 語 的 ル ー ル に よ り操 作 量 を決 定 す るた め,モ デ ル の導 出 が 困 難 な 油圧 サ ー ボ シ ス テム に と って は大 き な魅 力 が あ る.し か し,制 御 結 果 は作 成 した ル ー ル に依 存 す るた め,実 機 毎 の動 特 性 を考 慮 した適 切 な制 御 ル ー ル の 設 定 が必 要 で あ る. そ こで,制 御 ル ー ル を 自動 的 に調 整 す る手 法 が提 案 さ れ て い る.こ の うち,自 己 調 整 フ ァ ジ ィ コ ン トロー ラ (STFC)8)は フ ィー ドフ ォワ ー ド コン トロ ー ラ と して 使 用 され,そ の制 御 ル ール の後 件 部 は シ ング ル トン変 数 と して 追従 誤 差 信 号 を零 収 束 させ る よ う自動 的 に調 整 され る.し か しな が ら,制 御 ル ー ル 数 は入 力 信 号 の 全 ての 組 み合 わ せ を考 えて い るた め(以 下,こ れ を ク ロス 方 式 と記 述 す る),詳 細 な ル ー ル を記 述 す れ ば す る ほ ど調 整 す べ き後 件部 変 数 は飛 躍 的 に増加 す る.こ の こ とは,無 用 な制 御 ル ー ルが 存 在 す るば か りで な く大 容 量 の メ モ リを必 要 とし,演 算 時 間 の制 約 か ら も実 機 へ の 適 用 に は問 題 が あ る.こ れ を 解 決 す る た め に, STFCの 制 御 ル ー ル 数 低 減 化 法 と して 予 め 入 力 信 号 を 2組 の ペ ア と し て制 御 ル ー ル を構 成 す る リ ン グ方 式9) が検 討 され て は い る もの の,実 用化 に お い て は未 だ十 分 とは 言 え な い. そ こで,本 論 文 で は,実 用化 を前 提 とし,さ らな る STFCの 制 御 ル ー ル 数低 減 化 法 につ い て検 討 して い る. 制 御 ル ール の低 減 化 法 と して,入 力 信 号 毎 にそ れ ぞ れ 独立 した制 御 ル ー ル を設定 す る セパ レー ト方 式 を提 案 し,従 来 の ク ロス 方 式,リ ン グ方 式 と比 較 検 討 して い る.以 下 で は,提 案 した 油圧 サ ー ボ シ ステ ム の 構成 お よび制 御 アル ゴ リズ ム に つ い て詳 述 し,高 所 作 業車 に 適 用 した場 合 の 実 測 結 果 か ら提 案 した 低 減 化 法 の有 用 性 を確 認 し て い る. 2. 高 所 作 業 車 提 案 す る低 減 化 法 の有 効 性 を確 認 す るた め,高 所 作 業 車(タ ダ ノAC-125S;作 業 床 の 最 大 地 上 高12.5 [m])の ブー ム 伸 縮 に つ い て実 測 を行 った.ブ ー ム伸 縮軸 の油 圧 回路 をFig.1に 示 す.ま ず,油 圧 はエ ンジ ン に よ り駆 動 す る ポ ンプ に よ り発 生 させ,そ の 供 給圧 を リ リー フ弁 に よ り設 定値 に調 整 した 後,電 磁比 例 流量 制御 弁 を介 し て シ リ ンダ を駆 動 す る.こ の シ リ ンダ と ブ ー ム との間 に設 け られ た ワ イ ヤー に よ りブ ー ム伸 縮 動作 を行 う と とも に,シ リ ンダ に は カ ウ ン タバ ラ ンス 弁 が つ け られ て お り,配 管 お よび ホー ス等 の破 損 に よ るブ ー ム の重 力 方 向 へ の 急激 な降 下 を防止 して い る. また,ブ ー ム長 さの検 出 の た め に ポテ ン シ ョメー タ が 付 け られ て お り,検出 され た ブ ー ム長 は12ビ ッ トA/D 変 換 器 を 介 し,補 償 器 を 構 築 し た パ ー ソナ ル コ ン ピ ュー タ(CPU80486+NDP80487)に 取 り込 んで い る. な お,サ ン プ リ ング 周期 は実 装 を考慮 して25[msec] と した. 3. 制 御 ア ル ゴ リ ズ ム 提 案 す る油 圧 サ ー ボ シ ス テム の制 御 目的 は,伸 縮軸 の位 置yの み を観 測 し,制 御 弁 ス プ ー ル位 置 を操 作 す る こ とに よ り,任 意 の 姿勢 にお い て規 範 位 置yrに 遅 れ な く出力 位 置 を追従 させ る こ とで あ る.従 来 の 制御 シ ス テ ム は固 定 ゲ イ ンフ ィー ドバ ッ ク コン トロー ラで構 成 さ れ て お り,最 適 なパ ラ メー タの 調整 に は試 行 錯誤 が必 要 で あ る う え十 分 な追 従 特 性 も得 られ て いな い。 提 案 す る シ ス テ ム は,Fig.2に 示 す よ う にPIコ ン ト ロー ラを用 い た フ ィー ドバ ック制 御 シス テ ム に フ ィー ドフ ォ ワー ドコ ン トロ ー ラ と してSTFCを 付 加 して い
Fig. 1 Hydraulic schema of boom telescoping
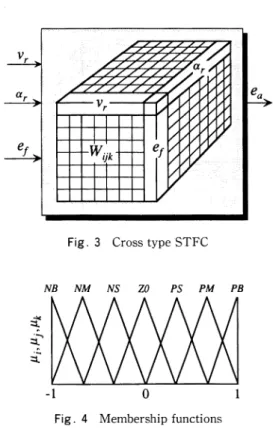
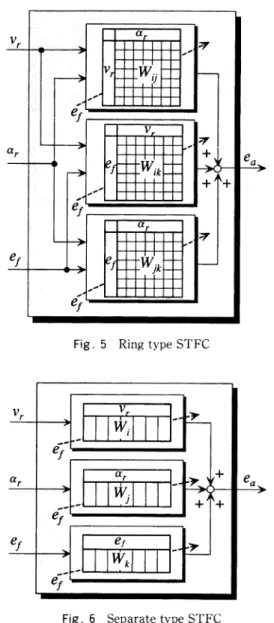
る.図 中,yr:規 範 位 置 入力,vr:規 範 速 度入 力,αr: 規 範 加 速 度 入 力,y:出 力 位 置,ef:追 従 誤 差 信 号, kp:比 例 ゲ イ ン,ki:積 分 ゲ イ ン,ec:PIコ ン トロ ー ラ 出 力,ea:フ ァ ジ ィ コ ン トロー ラ出 力,μijk:前 件 部 グ レー ド,Wijk:後 件 部 変 数 で あ る. STFCの 目的 は,油 圧 ア ク チ ュ エ ー タ固 有 の不 感 帯 な どの 非 線形 性 を補 償 し,規 範 位 置 と出 力位 置 を一 致 させ るた め に必 要 な 操作 量 を フ ァ ジ ィ推 論 に よ り求 め る こ とで あ る.STFCは ル ー ル調 整 部 とフ ァジ ィ推 論 部 に機 能上 分 け られ る.ル ール 調 整 部 で は,追 従 誤 差 信 号 を零収 束 させ る よ う後 件 部 変 数 を 自動 的 に調整 す る.こ の こ とに よ り実機 毎 の制 御 ル ー ル の チ ュー ニ ン グが 著 し く簡 略 化 で き調 整工 数 が 削減 で き る.ま た, フ ァ ジ ィ推 論 部 で は調 整 され た制 御 ル ール を用 い て簡 略 法 に よ り操 作 量 を推 論 す る.フ ァジ ィ コ ン トロー ラ の入 力 信 号 は,規 範 速 度vr,規 範加 速 度 αrおよ び追 従誤 差 信 号efで あ る. 作 成 す るル ー ル は,各 入 力信 号 を組 み合 わ せ て 制御 ル ー ル を記述 す る方 法 として,既 報 の ク ロ ス方 式8),リ ン グ 方式9)に加 えて 実 用 化 を前 提 と して ル ー ル 数 を低 減 した セ パ レー ト方 式 につ い て検 討 す る。 3.1 ク ロス方 式STFC Fig.3に 示 す ク ロ ス方 式 の フ ァジ ィ制 御 ル ー ル は以 下 の よ うに表 さ れ る. (1) こ こ でvr:規 範 速 度,αr:規 範 加 速 度,ef:追 従 誤 差 で, ea:フ ァ ジ ィ 推 論 器 の 出 力,Ai,Bj,Ck:Fig.4に 示 すNB(Negative Big)∼PB(Positive Big)ま で の フ ァ ジ ィ 変 数,Wijk:シ ン グ ル ト ン の 後 件 部 変 数 で あ る.こ こ で 規 範 速 度,規 範 加 速 度 は機 械 の 最 大 能 力 を 考 慮 し て 正 規 化 し,追 従 誤 差 信 号 に つ い て は 試 行 錯 誤 に よ り正 規 化 ゲ イ ン を 求 め る.ク ロ ス 方 式 のSTFCの 出 力eaは,荷 重 平 均 に よ りnサ ン プ リ ン グ に お い て 次 式 で 与 え ら れ る. (2) こ こ で,ui,uj,ukは 各 入 力 信 号 の グ レ ー ドで あ る.ま た,選 択 さ れ た ル ー ル の 後 件 部 変 数Wijkは,勾 配 法 に よ り次 式 に よ り求 め ら れ る. (3) こ こで γ>0は 調 整 ゲ イ ン で あ る.(1)式 か ら明 らか な よ うに,ク ロス 方 式 で は入 力 信 号 全 て の組 み合 わせ と して制 御 ルー ル が構 築 され るた め 設 定 が容 易 で あ る も の の,実 用 化 に際 して は以 下 の 問 題 点 が あ る.ま ず, 入 力 信 号 の フ ァジ ィ分 割 数 を」(=7),入 力 信 号 の 数 を m(=3)と す る と,設 定 さ れ る ル ール 数 はlm(=73= 343)個 とな る.こ れ は入 力 信 号 数 の増 加 に伴 いル ー ル 数 が 指 数 的 に増 大 す る こ とを意 味 して い る.ま た,そ れ らの ル ー ル の 中 に は最 大 規 範 速 度 で最 大 規 範 加 速 度 を とる よ うな 物 理 的意 味 の ない ル ー ル も存 在 す る.さ らに,(3)式 で 各 サ ンプ リン グ毎 に調整 され る後 件 部 変 数 は,Fig.4に 示 す メ ンバ シ ップ 関数 を用 い る場 合,各 入 力 信 号 に対 して そ れ ぞれ2つ の フ ァジ ィ変 数 が選 択 さ れ るた め,そ の組 み合 わ せ と して合 計 蟹(=8)個 とな る.こ れ は大 容量 の メ モ リと高 速 な 演 算時 間 を必 要 とす る. 3.2 ル ー ル 数 低 減 化 ク ロ ス方 式 の 問題 点 を解 決 す るた め にル ー ル数 の低 減 を 目的 として,次 の2つ の方 式 を検 討 す る. 1) リン グ方 式 リ ング方 式 は,入 力 信号 を予 め2つ の 入 力 信号 のペ ア に分 割 し,そ れ ぞ れ の2入 力 信 号 問 で 制御 ル ー ル を 構 成 す る.リ ング 方式 のル ール テ ー ブ ル をFig.5に 示 す.リ ン グ方 式 の フ ァ ジ ィ制 御 ル ール は以 下 の よ うに 記 述 さ れ る. (4) Fig. 3 Cross type STFC
788 油 圧 と 空 気 圧 こ の 結 果,リ ン グ 方 式 の ル ー ル 数 はmC2×l2(=3×72 =147)個 と な り,ク ロ ス 方 式 に 比 較 し て ル ー ル 数 は 低 減 さ れ る.出 力eaは 次 式 に よ り求 め ら れ る.
(5)
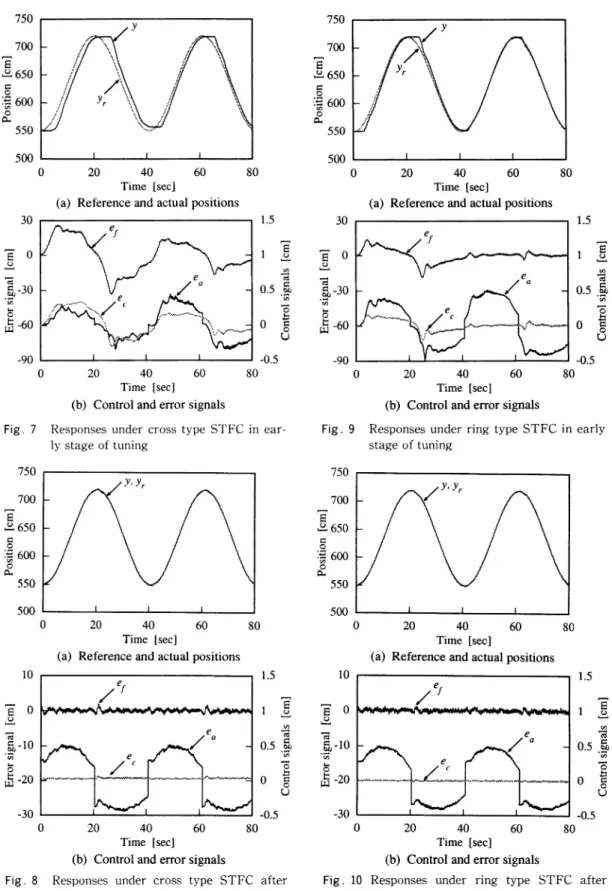
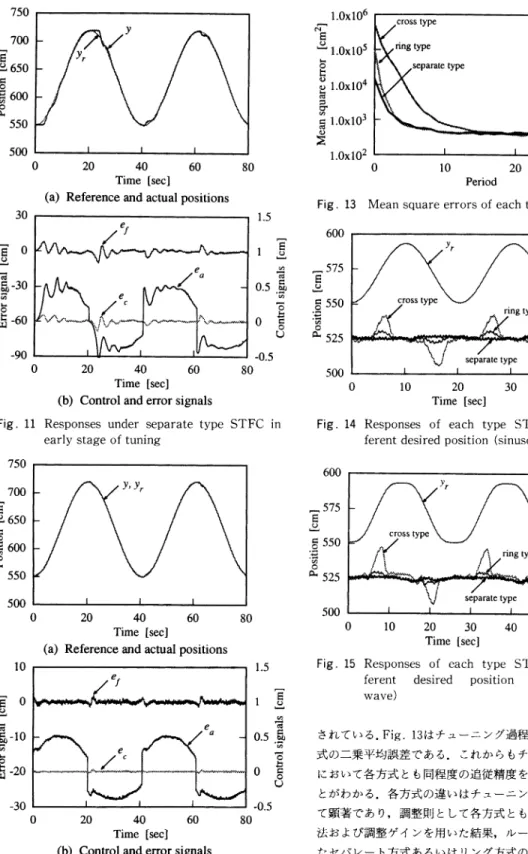
な お,サ ンプ リン グ毎 の 調 整 ル ー ル数 は22×m(=12) 個 とな り,ク ロ ス 方式 よ りも増 加 す る. 2) セ パ レー ト方式 ク ロ ス方 式 に比 較 して リン グ方 式 はル ー ル総 数 を低 減 で き る もの の,サ ン プ リン グ毎 の 調整 ル ー ル数 は増 加 し,実 用 的 観 点 か ら更 な る低 減 化 が 必 要 で あ る.そ こで,Fig.6に 示 す よ うに入 力 信 号 をそ れ ぞ れ独 立 に し,各 信 号 の大 きさ に応 じて ゲ イ ン を調 整 す る た めの 制 御 ル ー ル を設 定 した セパ レー ト方式 を提 案 す る.セ パ レー ト方 式 の制 御 ルー ル は以 下 の よ う に表 され る. (6) セ パ レ ー ト方 式 で の ル ー ル 数 は l×m (7×3=21) 個 と な り,著 し い 低 減 化 が 実 現 さ れ る.ま た,サ ン プ リ ン グ 毎 の 調 整 ル ー ル 数 は2×m(=6)個 で あ り,(7) 式 に 示 す コ ン トロ ー ラ の 出 力 算 出 式 か ら も 演 算 量 は 大 幅 に 削 減 さ れ,ソ フ ト ウ エ ア サ ー ボ を 構 成 す る場 合 に CPUへ の 負 担 が 減 少 す る こ とが わ か る. (7) しか しな が ら,(6)式 か ら明 らか な よ うにセ パ レー ト 方式 の制 御 ル ー ル は,各 入 力 信 号 の大 き さ に応 じて ゲ イ ン を調 整 す る可 変 ゲ イ ン コ ン トロ ー ラ とみ なす こ と が で き るた め,各 入 力信 号 の 組 み合 わせ に応 じて適 切 に ゲ イ ン を調 整 す る フ ァジ ィ推 論 の特 徴 が 薄 れ,非 線 形 性 補 償 能 力 や 汎化 能 力 の低 下 が 懸念 され る.以 下 で は各 方式 のSTFCを 実機 に適 用 し,実 用 的 な 制 御 ル ー ル の構 成 法 につ い て検 討 す る. 4. 実 測 結 果 提 案 す るル ー ル 数低 減 化 の有 効性 を確 認 す るた め に, 2章 の油 圧 サ ー ボ系 を用 い,各 方 式 のSTFCに よる 追 従 特 性 を実 測 した.規 範 位 置 信 号 と して6.35[m]を 中 心 と して振 幅0.85[m],周 期40[sec]の 正 弦 波 を用 い た と きの各 方 式 の チ ュ ー ニ ン グ初 期段 階 お よ びチ ュー ニ ング後 の応 答 特性 をFig .7か らFig.12に 示 す.い ず れ の 方式 も固 定 ゲ イ ンフ ィー ドバ ッ ク コン トロー ラ は 設 計 者 が試 行 錯 誤 で調 整 した従 来 の ゲ イ ン(kp=0.01, ki=0.0005)を 用 い,制 御 ル ー ルの 調 整 パ ラ メー タの初 期 値 は すべ て零 に設 定 して い る.チ ュー ニ ン グ初 期段 階 で は油 圧 ア クチ ュエ ー タ の非 線 形 性 に よる追 従 誤 差 が 現 れ て い る もの の,チ ュ ー ニ ン グ の 進 行 と と も に フ ァ ジ ィ コ ン トロ ー ラ の 出 力eaが 徐 々 に 増 加 し, チ ュ ー ニ ン グ後 にお い て 出力 位 置 は規 範位 置 に遅 れ な く追従 して い る こ とが わ か る.こ れ らの 結果 は,制 御 の 主 体 が チ ュ ー ニ ン グ の進 行 に伴 いPIコ ン トロ ー ラ か らSTFCに 移 行 して い る こ とを 示 して い る.ま た, チ ュ ー ニ ン グ後 のSTFCの 出 力eaは,油 圧 ア ク チ ュ エ ー タ や油 圧 制 御 弁 の加 工 精 度 に起 因 す る非 対 称 性 を 補 償 す る よ う正 負 で 異 な る大 き さ とな って お り,操 作 方 向 が切 り替 わ る時 点 で は不 感 帯 を補 償 す る よ う出 力 Fig . 5 Ring type STFC(a) Reference and actual positions
(b) Control and error signals
(a) Reference and actual positions
(b) Control and error signals
(a) Reference and actual positions
(b) Control and error signals
(a) Reference and actual positions
(b) Control and error signals
Fig. 7 Responses under cross type STFC inear-ly stage of tuning
Fig. 8 Responses under cross type STFC after
tuning
Fig. 9 Responses under ring type STFC in early stage of tuning
Fig. 10 Responses under ring type STFC after tuning
790 油 圧 と 空 気 圧
(a) Reference and actual positions
(b) Control and error signals
(a) Reference and actual positions
(b) Control and error signals
され て い る.Fig.13は チ ュー ニ ン グ過 程 にお け る各 方 式 の二 乗 平均 誤 差 で あ る.こ れ か ら もチ ュー ニ ング後 に お いて 各 方 式 と も同程 度 の 追 従精 度 を示 して い る こ とが わ か る.各 方式 の違 い はチ ュー ニ ン グ初 期 に お い て顕 著 で あ り,調 整 則 として 各 方 式 と も同 じ最 急 降下 法 お よ び調 整 ゲ イ ンを用 いた 結 果,ル ール 数 を低 減 し た セパ レー ト方 式 あ る い は リング 方式 の方 が ク ロス 方 式 よ りも誤 差 収束 が圧 倒 的 に早 い.こ れ は時 間 的 に変 化 す る規 範 信 号 に対 して,ク ロス 方式,リ ン グ方 式,
Fig. 11 Responses under separate type STFC in
early stage of tuning
Fig. 12 Responses under separate type STFC
after tuning
Fig. 13 Mean square errors of each type STFC
Fig. 14 Responses of each type STFC for
dif-ferent desired position (sinusoidal wave)
Fig. 15 Responses of each type STFC for
dif-ferent desired position (trapezoidal
セパ レー ト方 式 の 順 に,1ル ー ル の 調 整 回 数 が多 くな るた め 二乗 平 均 誤 差 の収 束 速 度 も速 く,適 切 なル ール が 簡 潔 に記 述 され て い る と思 わ れ る. 次 に,各 方 式 の 汎 化能 力 を確 か め るた め に,前 述 の 正 弦 波信 号 で チ ュー ニ ング後,後 件 部 変数 を固 定 し, 周 期20[sec],振 幅0.21[m]の 正 弦 波規 範 信 号 お よび 周 期26[sec],振 幅0.21[m]の 台 形 波規 範 信 号 に対 す る応 答 特性 を実 測 した.Fig.14お よびFig.15に 各 規 範 入 力 に対 す る応 答 特性 を示 す.こ の 結 果 よ り,提 案 したセ パ レー ト方 式 は制 御 ル ー ル数 が 他 の 方式 比 較 し て少 な い もの の適 切 な ゲ イ ン調 整 が 図 られ て い る た め, 他 の方 式 と同等 以 上 の 汎 化能 力 を有 し てい る こ とが 確 か め られ た. 5. ま と め 本 論 文 で は,実 用 化 を前提 と して,非 線 形性 の強 い 油 圧 サ ー ボ 系 に 自 己 調 整 フ ァ ジ ィ コ ン ト ロ ー ラ (STFC)を 適 用 す る場 合 の制 御 ル ー ル低 減 化 法 に つ い て検 討 した.制 御 ル ー ル の低 減 化 法 として,入 力 信 号 を予 め2つ の 入力 信 号 の ペ ア に分 割 しそれ ぞ れ の2入 力 信 号 間 で制 御 ル ー ル を構 成 す る リン グ方 式 と,入 力 信 号 を それ ぞ れ独 立 に し各信 号 の大 き さ に応 じて ゲ イ ンを調 整 す る た めの ル ー ル を構 成 す る セパ レー ト方式 を比 較 して い る.提 案 した 各 方式 を高 所 作 業車 の ブ ー ム伸 縮 軸 の 油圧 ア クチ ュエ ー タ に適 用 し,追 従特 性 を 実測 した.そ の結 果,以 下 の点 が明 らか とな った. (1) 従 来 の クロ ス方 式,リ ング 方式 に加 えて,提 案 し た セパ レー ト方 式 を 用 い たSTFCは と もに 油圧 ア ク チ ュエ ー タの非 対 称 性 や 非線 形 性 を補 償 し,追 従 特 性 の著 しい 改善 に有 効 で あ る. (2) フ ァジ ィ分割 数 を1,入 力 信 号 数 をmと す る と き, ク ロ ス方 式,リ ング方 式,セ パ レー ト方 式 で 設 定 さ れ るル ー ル 数 は そ れ ぞれJm,mC2×l2,1mと な り, 特 に,セ パ レー ト方式 はル ー ル 数 の低 減 に最 も有効 で あ り,ま た,サ ンプ リン グ毎 に 出 力算 定 に要 す る 演算 量 も少 な くCPUへ の 負担 も軽 減 され る. (3) さ らに,セ パ レー ト方 式 は他 の 方 式 よ り冗 長 度 の 低 い ルー ル 構成 か ら調 整 が 高 速 に行 わ れ る と と もに, 汎化 能 力 に優 れ る. 以 上 よ り,油 圧 サ ー ボ 系 の 実 用 的 観 点 か ら,追 従 特 性 の 改 善 と調 整 工 程 の 簡 略 化 に 対 し,セ パ レ ー ト方 式 を 用 い たSTFCが 最 も有 効 で あ る と 思 わ れ る. 参 考 文 献 1) 中 尾,浦 田:電 気 油 圧 サ ー ボ シ ス テ ム の 適 応 フ ィ ー ド フ ォ ワ ー ド制 御,日 本 機 械 学 会 論 文 集 (C編), Vol.60, No.569, pp 190∼pp 197 (1994) 2) 阿 部,小 波:電 気 油 圧 サ ー ボ シ ス テ ム の 動 特 性 改 善,油 圧 と空 気 圧, Vol.24, No.1, pp 130∼pp 137 (1993) 3) 山 本,横 田,三 橋:配 電 作 業 用 電 気 油 圧 マ ニ ピ ュ レ ー タ の 高 精 度 制 御,油 圧 と 空 気 圧, Vol.26, No 7, pp 896∼pp 902 (1995) 4) 小 菅:外 乱 推 定 オ ブ ザ ー バ を 用 い た 油 圧 駆 動 式 マ ニ ピ ュ レ ー タ の 制 御,機 械 学 会 論 文 集(C編), Vol.59, No.563, pp 2152∼2156 (1993) 5) 鮫 島,藤 井:フ ァ ジ ィ理 論 に よ る 油 圧 シ ョ ベ ル 向 け 自 動 掘 削 制 御 装 置 の 開 発,機 械 学 会 ロ ボ テ ィ ク ス メ カ トロ ニ ク ス 講 演 会 論 文 集, Vol.A, pp 509 ∼512 (1995) 6) 横 田,笹 尾,一 柳:油 圧 シ ョベ ル の ブ ー ム,ア ー ム 系 の 高 精 度 軌 跡 制 御,日 本 機 械 学 会 論 文 集(C 編), Vol.62, No.593, pp 161∼pp 167 (1996) 7) 宮 嶋,佐 藤,水 谷:建 設 機 械 へ の フ ァ ジ ィ 制 御 の 適 用, 7th Fuzzy Symposium, pp 255—•`pp 258 (1991)
8) J. Fukumi, T. Kamano,
T. Suzuki and Y.
Kataoka:
Positioning
System with
Progres-sive Wave-Type
Ultrasonic Motor under Self
-Tuning
Fuzzy Control
, Journal
of Robotics
and Mechatronics,
Vol. 7, No. 1, pp 63—pp 68
(1995)
9) 鎌 野,鈴 木,安 野,漆 原,片 岡:自 己 調 整 フ ァ
ジ ィ コ ン トロ ー ラ に お け るル ー ル 数低 減 化 法 の検 討,平 成6年 度 電 気 関 係 学 会 四 国 支部 連 合 大 会,