多目的大空間におけるファジィモデルを用いた 空調制御に関する研究
植田 俊克
電気通信大学大学院電気通信学研究科 博士(工学)の学位申請論文
2009 年 3 月
多目的大空間におけるファジィモデルを用いた 空調制御に関する研究
博士論文審査委員 会
主査 本多 中二 教授
委員 萩野 剛二郎 教授
委員 新 誠一 教授
委員 板倉 直明 准教授
委員 酒井 孝司 准教授
著作権所有者 植田 俊克
2009
A Study on HVAC Control Based on a Fuzzy Model for Multipurpose Large Indoor Spaces
Toshikatsu Ueda
Abstract
In large indoor spaces, air volume is large, and there is great distance between the occu- pied zones and air outlets as well. As a result, it is easy for time delays and instabilities to arise with HVAC (Heating, Ventilating and Air-conditioning) systems for large spaces. In addition, large spaces such as dome type baseball stadiums and event halls are used for a variety of purposes, and there are limitations on the locations where the sensors for an HVAC control system can be installed. As a result, it is difficult to obtain representative temperature and air velocity distributions of occupied zones. This paper proposes an HVAC control system using a fuzzy model as a method to resolve these problems. A fuzzy model is constructed by using data obtained from estimating various parameters such as outlet air temperature, outlet air volume, and human body load, which affect the temperature distribution within a space, by using CFD (Computational Fluid Dynamics) simulations. Fuzzy models adopt a simplified fuzzy reasoning method, and can estimate nonlinear temperature characteristics with high accuracy. Rules for fuzzy models are automatically generated using data from CFD simulations. The HVAC control presented here estimates the averaged temperature of an occupied zone based on the tempera- ture of the sensor location using a fuzzy model, and conducts PID control so that the estimated temperature becomes the set temperature. From the results of control simulation using CFD, this HVAC control based on a fuzzy model is able to achieve control with little offset as compared with conventional PID control where the temperature at the sensor location is the representative temperature of the occupied zone.
This paper is comprised of six chapters, and a short summary of each chapter is given below.Chapter 1 consists of the background behind this study and an abstract of the method proposed in this study.
Chapter 2 describes fuzzy modeling and CFD, which are elemental technologies in this study, and also explains the control method (FM-PID) based on the fuzzy model.
Chapter 3 presents a case study using CFD simulation based on 9 cases—consisting of 3 different usage purpose and 3 sensor positions—as parameters. In this chapter, a comparison is made between FM-PID control in a CAV (constant air volume) system and PID control, where the sensor temperature serves as the representative temperature. Based on the results of this comparison, it was demonstrated that with FM-PID control, it is possible for the temperature in an occupied zone to serve as the set temperature without depending on the usage purpose or sensor location.
Chapter 4 presents a case study similar to the one in Chapter 3, and also reviews control performance in a VAV (variable air volume) system. A VAV system is superior in energy conservation as compared to the CAV system, and is used widely in offices, etc. However, since temperature distribution changes greatly when the VAV system is used in large, indoor spaces, there are very few examples of the VAV system being used in such spaces. Based on the results of control simulation using CFD, it was demonstrated that FM-PID control can be suitable for VAV systems in large, indoor spaces.
Chapter 5 introduces a control simulation with the VAV system that takes the introduction of outside air into consideration, which demonstrates the high control performance and energy conservation effects of FM-PID control.
Chapter 6 consists of the results of this study as well as future issues for research.
多目的大空間におけるファジィモデルを用いた 空調制御に関する研究
植田 俊 克
論 文 概 要
体育館,ドーム球場,コンサートホール,イベントホール,アトリウムなどに 代表される大空間は気積が大きいという共通の特徴を有し,さらにドーム球場,
イベント ホールは 様々な用 途に利用 される.
大空間空調ではその気積の大きさから吹出し口と居住域が離れている場合が多 く,時間遅れや制御の不安定が生じやすい.さらに多目的に用いられる大空間で は使用用途によって外乱である人員密度分布が異なることから,適切なセンサー 位置が未知であることが多く,温度分布の不均一や居住域の温度と設定値にずれ が生じやすい.そのため大空間での空調制御を円滑に運用するためには熟練のオ ペレ ー タ によ る 長 い経 験 と 勘に 因 る とこ ろ が 多 い.また ,京都 議 定 書が 発 効 さ れ,膨大なエネルギーを消費する大空調には省エネルギーへの取り組みが必須と なって いる.
そこで,本研究では多目的に使用されるドーム球場において,センサー位置や 使用 用 途 の影 響 を 受け ず に 快適 か つ 省エ ネ ル ギ ー性 の 優 れた 空 調 制御 法 を 提案 し,数値流体力学( 以下,C F D とする) 解析によりその有効性を検証する.提案す る制御法は,外乱に応じた空間の温度分布をあらかじめ求めておき,温度分布を 予測しながら制御を行うもので,温度分布の予測にはファジィモデルを,制御に 関しては P I D 制御を用いる.ファジィモデルは非線形性の強いデータに対して高 精度に表現でき,得られたメンバーシップ関数からデータ構造を容易に理解でき るという特徴を有している.また,P I D 制御に関しては既設の大空間で多く採用 されているため,今までの膨大な知見をそのまま用いることができ,さらに本制 御法の既設建物への導入が容易になるという利点がある.本論文は全6章から構 成されて おり,各章の概 要を以下 に示す .
第1章『序論』では,本論文の研 究背景お よび既往 の研究と本 研究の目 的,
本制御法の概 要を述べる.
第2章『ファジィモデルを用いた P I D 制御』では,本研究の要素技術である ファジィモデリングと C F D 解析に関して述べた後,本制御法を提案する.ファ ジィモデ リング は簡略化 ファジ ィ推論法 を用い て,データか ら自動 的にルー ル を作成することができる方法としている.また,C F D はデータを作成する際と 制御シミ ュレー タとして 用いて おり,実現象を 詳細に 予測する .提案する 制御 法は操作量( 吹出し温度,吹出し風量) と検出量( 温度センサー値) ,検出器( 温 度センサー) 位置座標を入力値としたファジィモデルを用いて居住域の平均温 度を予測し,居住域の平均温度が目標値となるように P I D 制御を行うもので,
任意の検出器の 位置で任意の 居住域の空調 制御が可能と なっている.
第3章『定風量 方式』では,大空間空 調で最 も一般的 に用い られてい る風量 を一定とし て吹出し温 度を制御す る定風量 方式におい て,使用用途3 パター ン,センサー位置3パターンの9ケースに対して C F D 解析による制御シミュ レーションを行い,センサー温度を代表温度とする P I D 制御と本制御法を比較 することで ,本制御法が 制御性を損 なうことな く,いかなる使 用用途,セン サー位置に おいても,居住域温度 をほぼ目標 値とするこ とができ ることを示 す.さらに,さまざまな外乱 に対して柔軟 に対応可能であ ることを示す . 第4章『変風量 方式』では,居住域温 度と吹 出し温度 との差 を可能な 限り大 きくしつ つ吹出 し風量を 制御す る変風量 方式に おいて 第3章と 同様の 解析を行 う。変風量方 式は事 務室で多 く採用 され,定風量方 式より エネルギ ー消費 が少 ないとい う特徴 を有する が,空間の温 度分布 が不均一 になり やすく大 空間で は ほとんど 採用さ れていな い。そこで,任意の位 置での 空間温度 を予測 できる本 制御法が,変風量方式の 大空間空調 に有効である ことを示す .
第5章『外気導 入を考 慮した変 風量方 式』では,本制御法 を用い た変風量 方 式の実建 物への 導入を想 定し,人体が発 生源と なる二酸 化炭素 濃度が許 容値以 下となる 必要外 気量を確 保した 上での制 御性を 検証し ,安定した 制御が 可能で あることを 示した後,省エネルギ ー効果を試 算する.
第6章『結論』では,本研究の成果と 今後の課題およ び展望をまと める.
目 次
第1章 序論 ... 1
1.1 背景 ... 1
1 . 2 既往の研究と本研究で提案する制御法 . . . 2
第2章 ファジィモデルを用いた P I D 制御 . . . 4
2.1 ファジィモデリング ... 4
2.1 .1 簡略化ファジィ推論法 .... ... ... ... .. 4
2.1.2 ルール生成法 ... 6
2.2 室内気流・温度場の予測 ... 9
2.2.1 CFD... 9
2.2.2 CFD の数値解法 ... 10
2.2.3 乱流 ... 12
2.3 制御法 ...14
2 . 3 . 1 ファジィモデルの入出力変数 . . . 1 4 2.3.2 制御アルゴリズム ... ...16
第3章 定風量方式 ...17
3.1 緒言 ...17
3. 2 C AV 方式の制御 . .. . . .. . . .. . . .. . . .. . .. . . .. . . .. . . .. . . .. . . .1 8 3 . 3 制御対象及びシミュレーション条件 . . . 1 9 3.3.1 制御対象 ...19
3 . 3 . 2 C FD 解析条件 . . . .. . . 2 1 3 .3 .3 ファジィモデル用データ . .. .. .. .. . .. .. .. .. .. . .. .. .. .2 1 3.3.4 ファジィモデル ...22
3.3.5 制御系の構成 ...27
3.3.6 制御パラメータ ...28
3.3.7 外乱 ...28
3.3.8 初期値 ...29
3.3.9 快適性の指標 ...29
3.4 シミュレーション結果 ...30
3.4.1 制御性の傾向 ...30
3.4.2 居住域温度定常値 ...37
3.4.3 行過ぎ量最大時の居住域温度 ...38
3.4.4 部分負荷時の FM-PID 制御 ...39
3.5 本章のまとめ ...40
第 4 章 変風量方式 ...41
4.1 緒言 ...41
4.2 VAV 方式の制御 ...42
4.3 制御対象及びシミュレーション条件 ...43
4.3.1 ファジィモデル用データ ...43
4.3.2 ファジィモデル ...43
4.3.3 制御系の構成 ...45
4.3.4 制御パラメータ ...46
4.3.5 初期値 ...46
4.3.6 その他の条件 ...46
4.4 安定性の改善 ...47
4.4.1 不安定な FM-PID 制御 ...47
4.4.2 ファジィ推論部の検証 ...49
4.4.3 PID 制御における目標値の調整 ...51
4. 4. 4 ファジィモデルの調整 .. ... ... .. ... ... ... ... .. ... ... 52
4.5 シミュレーション結果 ...56
4.5.1 制御性の傾向 ...56
4.5.2 居住域温度定常値 ...58
4.5.3 行過ぎ量最大時の居住域温度 ...59
4.6 本章のまとめ ...60
第5章 外気導入を考慮した変風量方式 ... ... ...61
5.1 緒言 ...61
5.2 CO2濃度制御 ...61
5 . 3 制御対象及びシミュレーション条件 . . . 6 3 5.3.1 CO2発生量 ...63
5.3.2 ファジィモデル用データ ...63
5. 3. 3 ファジィモデル .. .. .. .. ... .. .. .. ... .. .. .. ... .. .. .. 63
5.3.4 制御系の構成 ...67
5.3.5 制御パラメータ ...68
5.3.6 空調エネルギーの試算 ...68
5.3.7 初期値 ...68
5.3.8 その他の条件 ...68
5.4 シミュレーション結果 ...69
5 . 4. 1 制御性の傾向 . . . . .. . . .. . . .. . . .. . . 6 9 5.4.2 居住域温度定常値 ...73
5.4.3 行過ぎ量最大時の居住域温度 ...73
5.4.4 CO2濃度 ...74
5.4.5 空調エネルギー ...79
5.5 本章のまとめ ...81
第 6 章 結論 ...82
6.1 本研究の成果 ...82
6.2 今後の課題と展望 ...83
謝辞 ...86
参考文献 ...88
第1章 序論
1 . 1 背景
ドーム球場,イベントホール,体育館,音楽ホール,エントランス,アトリウ ムなどの大空間は,気積が大きいという共通の特徴を有する.さらに,ドーム球 場,イベントホール,体育館では,競技および競技観戦,イベント,コンサート,
集会など多目的 に利用される.
大空間は近年まで屋外で行われていたイベントを全天候型の室内へ移動した例 が多 く ,音楽 ホ ー ルを 除 い た初 期 の 大空 間 は ,屋外 よ り も快 適 で あれ ば 良 いと いった低いグレードの空調で十分であった.しかし,次々と新しい大空間が誕生 し,より質の高い空調に対する要求が年々高まっている[ 1 ] .
大空間の空調を行う際,気積が大きく,吹出し口と居住域の距離が離れている ことから,居住域に温度ムラが生じやすく制御時には時間遅れが問題となる.さ らに多目的に利用される大空間の空調では,用途により人員密度分布が異なるた め,用途ごとの気流・温度分布を考慮した空調を行う必要がある.しかし,実際 には主用途のみで空調計画される場合も多く,その他の用途に関しては運用開始 後の室内温度データを用いて設定温度,制御パラメータなどを調整しているのが 現状である.調整期間は,四季による変化を考慮するため,最低でも 1 年,場合 によっては各用途の頻度や試行錯誤により数年間が必要となる.このような状況 の中で少子高齢化により熟練した設備管理者が減少しており,経験的に設定値を 変更することが困難となりつつある.また,大空間のほとんどが無柱空間である ため温度センサーの設置位置が限定されてしまうことが空調制御を一層困難なも のとして いる.
一方,地球環境問題に果たす空調の役割は大きく,建物の冷暖房が民生業務部 門の二酸化炭素排出量の 1 / 3 を占める[ 2 ] ことからも省エネルギー対策は必須事項 である.その中でも大空間は,全体の割合は少ないものの,気積の大きな空間の 空調に膨大なエネル ギーを必要とする.
以上から,これからの大空間の空調には,快適性と省エネルギー性の両立が求 められる.また建物の構造的な耐久年数に対し,空調設備の寿命は短く,今まさ
にバブル期に建築された事務所ビル,大空間の設備更新が始まったところである.
よって新築建物だけでなく既設建物の空調設備の改修が容易であることもこれか らの空調設備に必 要な要素となる.
1 . 2 既往 の研 究と本 研究 で提案 する 制御法
1 0 0 m を超える規模の大空間建造物の空調システムに関する実規模実験を行うこ とはその規模の大きさからほぼ不可能であり,古くから模型実験が行われてきた.
1 9 6 4 年に代々木国立屋内競技場で勝田ら[ 3 ] がはじめて大空間の空調設計に模型 実験を用いて以来,勝田・土屋による一連の研究[ 4 - 6 ] を経て強制対流場での近 似相似則が整備され,縮尺相似模型と A r ( A r c h i m e d e s ) 数の一致を前提とした実験 が最も実績のある検証方法となっている.また,近年ではコンピュータの高速化 と数値解法の高速化・高精度化により N a v i e r - S t o k e s の運動方程式を基礎方程式 とした流れの数値解析( 以下,C F D 解析とする)が,模型実験に代わる新たな予測 手法として注目されており,村上ら[ 7 ] は模型実験と C F D 解析との比較を,さらに 尾関ら[ 8 ] は実大実験と C F D 解析の比較を行うことで精度の確認を行っている.実 規模の実験が困難で模型実験に頼らざるを得ない大空間空調の実現象予測に,実 スケールでの流れの挙動を再現できる C F D 解析は有効な手段となっており,現段 階において C F D 解析は模型実験と同程度の精度を有するまでになっている.
一方,既往の大空間空調制御の研究において,岩本ら[ 9 , 1 0 ] は模型実験により 適切な温度センサー配置に関する検討を行い,さらに橋本[ 1 1 ] が行った P I D 制御 パラメータのチューニングに用いたニューラルネットワーク手法を予測制御へ適 用し,時間遅れの低減を図っている.さらに,樋渡・庄司・大野ら[ 1 2 - 1 4 ] は適 切な温度センサー位置決定のため,換気効率指標を用いて竣工後の実測と C F D 解 析を行い,C F D 解析の精度を確認した上で加藤らの温熱環境形成寄与率[ 1 5 ] ( 以 下,C R I ) を C F D 解析で求め,温度センサー配置の適正化を図っている.しかし,
多目的使用時にセンサー温度と居住域温度が異なる場合の研究は行われていない.
そこで本研究では,あらかじめ熱負荷に応じて空間温度分布が推定可能なモデ ルを用いて,任意の居住域を制御対象とすることのできる制御法を提案する.任
意の位置での温度を推定する方法としては,C F D 解析を用いる方法があるが,C F D 解析は温度推定に膨大な計算時間を要し,リアルタイム性が求められる空調制御 に導入することは不可能である.そこで,あらかじめ実験・C F D 解析等により得 られた温度分布データを用いて予測モデルを作成することとする.モデルの作成 に関しては,C R I を用いることも可能であるが,C R I は気流分布を固定しているた め,冬期 の 大 空間 空 調 で生 じ る 人体 負 荷 の増 加 に 伴 う暖 房 か ら冷 房 へ のダ イ ナ ミックな気流の変化への対応には適さない.したがって,本研究では構造が容易 で,メンバーシップ関数により温度分布性状が大局的に把握できるファジィモデ ルを用いることとする.ファジィモデルは冷暖房空調時の室内温度分布データの ように非線形性の強いデータに対して高精度に表現できるという特徴を有してい る[16].
フ ァ ジ ィモ デ ル の導 出(以 下 ,ファ ジ ィ モデ リ ン グ)に関 し て は簡 略 化 ファ ジィ推論法を用いてルールを自動的に調整する荒木らの方法[ 1 7 ] を基本として データの特性に合わせて改良を加える.すなわち最急降下法を用いて推論誤差が もっとも小さくなるようにメンバーシップ関数を決定する.その後,誤差の最も 大きいデータ部に新たにルールを作成して推論誤差をさらに小さくする.この操 作を繰り返すことにより,モデルを自動的に高精度で構築することが可能となる.
制 御 に 関し て は 非線 形 性 の強 い 制 御対 象 に 対 し,ファ ジ ィ 推論 に 基 づく フ ァ ジィ制御が有効であることが示されている[ 1 8 - 2 3 ] .ファジィ制御は制御則をファ ジィ推論形式で記述するが,ファジィ推論のルール作成に試行錯誤を必要とする ことと既設建物への導入のしやすさを考慮し,本研究では実績の豊富な P I D 制御 を用いるこ ととする.
以上より本研究で提案する制御法は,測定されるデータからファジィモデルを 用い て 用 途毎 に 異 なる 居 住 域の 平 均 温度 を 推 定 し,推定 値 と 目標 値 の 偏差 か ら P I D 制御を行う方法となる.
第2章 ファジィモデルを用いた PID 制御
2 . 1 ファ ジィ モデ リン グ
2 .1 .1 簡略化ファジィ推論法
人間が日常行っている様なあいまいな推論をファジィ集合を用いて模擬すること をファジィ推論と呼び,一般に以下のように定式化できる.
ルールi: IF x1 is A1i and ・・・ and xn is Ani
THEN yi=Bi (i=1,2,・・・,r) ・・・・・・(1)
ここで,IF 以降 TH EN までの部分を前件部,TH EN 以降の部分を後件部といい,x は前 件部変数( 入力変数) ,y は後件部変数( 出力変数) ,Anはxnでのファジィ集合,B は y での結論部,iはルール番号,rはルール数,nは前件部変数の数である.ファジィ 推論には結論部Bi をファジィ集合で与える方法[ 2 4 ] ,入力変数の関数とする方法 [ 2 5 ] ,実数ciで与える方法[ 2 6 ] があり,実数で与える方法を簡略化ファジィ推論 法という.簡略化ファジィ推論法は他のファジィ推論法に比べ , モデリングの自 由度が制限されるものの実用上十分な精度を有しており,近年利用が盛んである [ 2 0 ] .さらに結論部が実数であるため,ルールの自動生成に適している[ 2 6 , 2 7 ] . 簡略化ファジィ推論プロセスは,以下のように示される[ 2 8 ] .
① 適合度hiを求める.
h
i= Π
nk=1μ A
ni( x
n0)
・・・・・・(2)ここで,μ An i(xn0) はAn iのxn0におけるメンバーシップ値である.
② 加重平均を求める.
Σ
ri=1h
ic
iy
0= ・・・・・・(3) Σ
ri=1h
iここで,y0 は出力値である.
例としてA のメンバーシップ関数を三角型,r= 4 ,n= 2 ,入力値をx1 0,x2 0,出力 値をy0 とした場合の推論プロセスを図 2 - 1 に示す.ファジィモデルは入力空間を ファジィ分割し,各空間毎に入出力関係を構築するため,複雑であったり数式で 近似することが困難な入出力関係を持つシステムに有効な方法である.さらに,
後件部実数値とメンバーシップ関数の関係 1 c1
c2
c3 c4 y0
x10 x20
A11 A12
a11
a12
0 A21A22 a21
a22 01
y0= (h1c1+h2c2+h3c3+h4c4 )/(h1+h2+h3+h4 )
① 適合度(hi)
② 出力値(y0)
A11
0 1
x10 a11
A21
0 1
x20 a21
c1
A11
0 1
x10
a11 A22
0 1
x20 a22
c2
A12
0 1
x10 a12
A21
0 1
x20 a21
c3
A12
0 1
x10
a12 A22
0 1
x20
a22
c4
h1=a11a21
h2=a11a22
h3=a12a21
h4=a12a22
図 2 - 1 簡略化ファジィ推論プロセス( 2入力1出力系)
多変数への拡張が容易で,メンバーシップ関数の分割割合で出力変数の性質が直感 的に類推できるという 特徴を有している.
2 .1. 2 ルール生成法
フ ァ ジ ィモ デ ル は,ルー ル の 記述 に 用 いる メ ン バー シ ッ プ関 数 ,分割 方 法 に よって精度が大きく異なるため,ルールの作成には逐次的にルールを生成する荒 木らの方法[ 1 7 ] を基本とし,データの特性に合わせて改良を加えることで精度向上 を図る.図 2 - 2 に1入力1出力系におけるルールの生成手順を示す.図中R はメ ンバーシップ関数で分割された領域である.荒木らの方法は簡略化ファジィ推論 法を用いて,そのパラメータであるルール後件部の実数値を調整しながら逐次的に 新たなルールを自動的に獲得する方法で,パラメータの調整は最急降下法,ルール
(b) 本法
図 2 - 2 後件部実数値の生成例( 1入力1出力系) (a ) 荒木らの方法
Y
X
R1
Y
X
R1 R2
Y
X
R1 R2 R3 A1 A2 A1 A2A3 A4 A1 A2A3 A4A5 A6
Y
X
R1
Y
X
R1 R2 Y
X
R1 R2 R3
A1 A2 A1 A2A3A4 A1 A2A3~ A6
の生成は図 2 - 2 ( a ) に示すように,前件部領域の中で最も推論誤差の大きい領域を 等分割するように1つずつ生成していく.前件部変数が格子状に配置されていない 場合に最急降下法を用いて誤差が最も小さくなる後件部実数値を決定するため,精 度の高いモデリングが可能となる.一方本提案法は,図 2 - 2 ( b ) に示すように,ルー ル生成の際,前件部領域の中でもっとも推論誤差の大きい値の位置でメンバーシッ プ関数を分割する点が特徴となっている.これにより,非線形性の強いデータに対 して効率よくルールを作成できる.反面,ノイズの多いデータに対しては推論誤差 が大きくなるという欠点を有するが,C F D 解析結果や関数近似のようにノイズの発 生しにくいデータに関しては有効である.
図 2 - 3 にモデリングのフローチャートを示す.メンバーシップ関数は三角型であ り、まず各入力データの最大最小値を端点とした初期メンバーシップ関数を作成す る.次にモデルの誤差が最大となる部分でメンバーシップ関数を分割し,収束判 定条件を満たすまでこれを繰り返すことで,より精度の高いモデルを生成してい く.以下に手 順を示 す.
①入出力データの 読み込み:多入力1出力デー タを読み込む.その際,ト レーニングデータとチェッキングデータには分割せず,すべてのデー タをモデリング に使用する.
②初期ファジィモデルの作成:各入力データの最大・最小値を端点とした初 期メンバーシップ関数を作成する.後件部実数値が出力データに無い 場合は最急降下法 により求める.
③ファジィモデルの最大誤差算出:ファジィモデルから得られるすべての入 力データ位置での推定値と出力デー タを比較し,最大誤差を求める.
④収束判定:収束判定条件を満足すればモデリングを終了する.収束判定条 件は,最大誤差による場合,最大誤差が前回よりも大きくなった場合,
ルール数による場合のいずれ かを選択することとする.
⑤最大誤差位置でメンバーシップ関数分割:収束判定条件を満足しない場合 は,最大誤差位置でメンバーシップ関数を分割し,出力データを後件 部実数値に代入する.その際,得られたメンバーシップ関数の中で後 件部実数値が出力データに無い場合は,前回のファジィモデルの推定 値を代入 する.
⑥最急降下法にて後件部実数値決定:出力データを代入していないすべての 後件部実数値に最急降下法を適用する.なお,分割範囲のデータが1 個以下と少ない場合は,過度なフィッティングを避けるため最急降下 法を使わ ない.
⑦繰り返し:③へ戻る.
図 2 - 3 ファジィモデリングフロー
注† 初期ファジィ モデルは各 入力データ の最小値・
最大値を端点 とし、出力データが 存在しない 場 合は最急降 下法にて 後件部実 数値を決定
最大誤差位 置でメン バーシッ プ関数分割 入出 力デ ータ 読込
初期フ ァジィ モデ ル†の作 成 ファジィ モデル の最大 誤差算出
収 束 no
yes END
最急降下 法にて後 件部実 数値決定 START
2 . 2 室内気流・温度場の予測
2.2.1 CFD
CFD は,Conputational Fluid Dynamics の頭文字をとっており,日本語では数 値流体力学,あるいは計算流体力学と訳されているが,現在では”C F D ”とその まま使う場合が多くなっている.C F D を駆使してコンピュータで流れ場を計算す ることを C F D 解析と呼んでいる.
C F D では,流れの支配方程式を数値的に解いて,流れの現象を解明することに なるが,膨大な計算量を必要とし,2 0 年ほど前まではスーパーコンピュータを用 いて解析が行われていた.しかし近年のコンピュータ性能の飛躍的な向上により,
現在ではパーソナルコンピュータを用いて室内の流れ場を解くことが可能になっ てい る.
C F D の研究は,理学・工学・医学など幅広い分野で行われており,理論的な研 究の他,様々な流れ現象を C F D で解き,実験と比較することで精度向上が図られ ている.応用研究としては,気象学,航空宇宙学,機械工学,土木・建築・環境 工学,医療工学などが挙げられる.また,実現象の予測ツールとして,設計開発,
性能・環境改善などに実用化され,今や実験に代わる手法として数値実験と呼ば れるまでになっている.さらに,航空宇宙分野や原子力関連など,実験に膨大な 時間と費用を必要としたり,実験自体が不可能な場合の現象解明手段として不可 欠な存在となっている[ 2 9 ] .
本研究で扱っている建築設備分野においては,ファン,ポンプ,バルブ,吹出 し・吸込み口などの流体を扱う製品開発のみならず,空調空間の流れ・温度場予 測,通風・換気などの非空調空間の換気性能把握,ボイラ排気の近隣への影響,
エアコン室外機周辺の温度予測などに利用され,扱う物理量も水流・気流・温度 だけではなく,湿度,粉塵濃度,揮発性化学物質濃度など多岐に渡っている[ 3 0 - 4 0 ] .なお,本研究では C F D 解析に商用コード『S T R E A M 』(( 株) ソフトウエアクレ イドル)を用いる .
2.2.2 CFD の数値解法
流れを数値的に解く際,まず扱う流体が圧縮性流体であるか非圧縮性流体であ るかによって扱う支配方程式が異なる.圧縮性流体( 気体) の場合は気体の状態方 程式と N a v i e r - S t o k e s の運動方程式( 以下,N - S 方程式とする) が,非圧縮性流体 の場合は連続の式と N - S 方程式が支配方程式となる.さらに温度を解析する場合 はエ ネ ル ギー 方 程 式が ,濃度 に 関 して は 濃 度方 程 式 が必 要 と なる .空調 空 間 を C F D 解析する場合,扱う流体は空気( 気体) であり,本来は圧縮性を示すが,空調 空間の流れは非圧縮性を示すことが知られている[ 4 1 ] .建築設備分野で圧縮性流 体として C F D 解析を行うのは,温度差の著しい流れ,特殊ガスが床を這うような 2流体間の気体の重さを考慮する流れ,著しい圧力変動を生じる流れのような特 殊用途に限られる.非圧縮性流体の温度を含めた支配方程式を表 2 - 1 に示す.
C F D 解析では,流体を微少な格子に分割し,その格子(あるいは交点)1つ1 つに支配方程式を適用する.格子系は構造格子系と非構造格子系に,構造格子系 はさらにデカルト( 直交) 座標系,円筒座標系,一般座標系に分けられ,非構造格 子は格子の形が,4 面体,6 面体,ピラミッド,三角柱などに分けられる[ 4 2 ] が,
空調空間では構造格子デカルト座標系が,扱いやすさ,計算速度,計算精度の点 から多く用いられており,本 C F D 解析でも構造格子デカルト座標系を用いる.
離散化は,代表的には有限差分法[ 4 3 ] ,有限体積法[ 4 4 ] ,有限要素法[ 4 5 ] が挙 げられるが,こちらも扱いやすさ,計算速度,計算精度,計算メモリの点から有 限体積法とする.また,有限体積法に用いる運動方程式の移流成分項( 表 2 - 1 中,
( 4 ) 式左辺第2項) の差分スキームは,計算安定化のために,流れの上流側に重み 付けを行う必要があるが,その近似精度が流れ場全体の精度に大きく影響するた め,本解析では 3 次精度を有する Q U I C K スキーム[ 4 6 ] とする.
次に,連続の式と N - S 方程式を連立して解く必要が生じるが,その方法を計算 アルゴリズムと呼び,M A C [ 4 7 ] 系と S I M P L E [ 4 8 ] 系に大別される.本 C F D では計算 の安定性,計算速度の観点から S I M P L E 系の S I M P L E C 法[ 4 9 ] を用いる.
質量保存の式 x 0
u
j
j =
¶
¶
運動量保存の式
(
0)
i3i j j
i j
j j
j
i i g T T
x u x u x
x p 1 x
u u t
u n b d
r - -
ïþ ïý ü ïî
ïí ì
÷÷ ø ö çç
è æ
¶ + ¶
¶
¶
¶ + ¶
¶ - ¶
¶ = + ¶
¶
¶
エネルギー保存の式
÷÷ ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
j r j j
j
x T P x x
Tu t
T n
拡散物質保存の式
÷÷ ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
j m j j
j
x D C x x
Cu t
C
・・・(4)
・・・(5)
・・・(6)
・・・(7) 表 2 - 1 支配方程式
ここに、ui:xi方向の速度[m/s], xi:位置座標[m],
t:時間[s],
p:流体の圧力[Pa], r:流体の密度[kg/m3],
n
:動粘性係数[m2/s],g:重力加速度[m/s2], b:体膨張率[1/℃],
d
ij:Kroneckerのデルタ,T:流体の温度[℃], T0:流体の基準温度[℃], Pr:Prandtl数[-],
C:拡散物質の濃度[m3], Dm:拡散係数[m2/s], 下添え字はEinsteinの総和規約に従う
2.2 .3 乱流
空調分野で扱う流れは,ごく一部を除き乱流である.乱流は大小様々な渦で構 成され,互いに干渉して分裂し,最終的には熱となる.C F D を用いて N - S 方程式 を厳密に解くためには,最小の渦を再現できるスケールで格子分割する必要があ り,空調空間に適用するためには現在のスーパーコンピュータを用いても不可能 である[ 5 0 ] .そのため,コンピュータを用いて実用的な時間で解を得るために,
乱流のモデル化を行う.現在,主流となっている方法は k - ε型 2 方程式モデル [51](以下,k- εモデルとする)と Large Eddy Simulation[52](以下,LES とす る) である.k - εモデルは,N - S 方程式の変数の瞬時値を,平均量と変動成分に分 割し,N - S 方程式に代入後,時間( アンサンブル) 平均することで得られるレイノ ルズ方程式中で未知の項であるレノルズ応力項を渦動粘性係数νt を用いて拡散 項に統合し,さらに渦動粘性係数が乱流エネルギー k とエネルギー逸散率εで表 現されるとしたモデルである.k - εモデルの基礎方程式を表 2 - 2 に示す.なお,
k- εモデルにおける N-S 方程式の拡散項は表 2-2 式(9)中の右辺第 2 項である.LES は,比較的流れ場に左右されない小さいスケールの乱れだけを統計的に処理し,
大きい渦は N - S 方程式を直接解くもので,k - εモデルに比べモデル化の度合が少 ないため精度が高い.しかし,L E S は時間平均操作を施さないため非定常解析が 必須であり,さらに大きいスケールの渦を表現するためには k - εモデルに比べて 膨大な格子数を必要とすることから多大な計算時間を必要とする.よって本研究 では,比較的高精度で,実用的な計算時間で解が得られる k - εモデルを用いるこ とと する .
質量保存の式
x 0 U
j
j =
¶
¶
運動量保存の式
(
0)
i3i j j
i e j i
j j
i i g T T
x U x
U k x
3 2 P x x
U U t
U n b d
r - -
ïþ ïý ü ïî
ïí ì
÷÷ ø ö çç
è æ
¶ + ¶
¶
¶
¶ + ¶
÷÷ø çç ö
è æ +
¶ - ¶
¶ = + ¶
¶
¶
乱流エネルギーkの保存の式
e
n ÷÷ + + -
ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
k k j k j j
j P G
x k x
x kU t
k
粘性逸散率εの保存の式
(
e)
e n e
e e
e l k 3 k 2
j j
j
j C P C G C
k x x
x U
t ÷÷+ + -
ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
エネルギー保存の式
÷÷ ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
j T j j
j
x T x
x TU t
T n
拡散物質保存の式
÷÷ ø ö çç
è æ
¶
¶
¶
= ¶
¶ + ¶
¶
¶
j c j j
j
x C x
x CU t
C n
表 2 - 2 k - ε型2方程式モデル
・・・(8)
・・・(9)
・・・(10)
・・・(11)
・・・(12)
・・・(13)
ここに、
U :xi方向の平均速度[m/s], P:平均圧力[Pa], k:乱流エネルギー[m2/s2],
e
:粘性逸散率[m2/s],nt:渦動粘性係数[m2/s],
Pk:kの生産項, Gk:浮力生産項, 下添え字はEinsteinの総和規約に従う
nt = CD ke2 ,
j i i
j j
i t
k x
U x U x
P U
¶
¶
÷÷ ø ö çç
è æ
¶ + ¶
¶
=n ¶ , i3
i t
k x
g T G
T
s d b n
¶
= ¶ ,
t
e n n
n = + ,
T t
T s
n n
n = + ,
k t
k s
n n
n = + ,
e
e s
n n
n = + t ,
C t
C s
n n
n = + ,
9
T =0.
s , sk =1.0, se = 1.3, sC = 0.9,
09 0
CD = . , Cl = 1.44, C2 = 1.92, C3 = 0
2 . 3 制御法
2 . 3 . 1 ファジィモデルの入出力変数
空調空間の温度分布を決定する要因として,熱負荷およびその分布,吹出し風 量,吹出し温度が挙げられる.本提案法では,まず熱負荷,熱負荷分布,吹出し 温度,吹出し風量をパラメータとした定常 C F D 解析を行い,メッシュ分割位置で の個々の空気温度を求める.なお,パラメータとしての熱負荷については,大空 間空調の熱負荷の大部分を占める人体負荷のみを扱うこととする.これにより得 られる変数は人体負荷,人体負荷分布,吹出し温度,吹出し風量,任意の3次元 空間位置 x ,y ,z での温度とその空間位置 x ,y ,z の8変数となり,これらのデー タを用いて多入力1出力のフ ァジィモデルを構築する.
次に外乱を熱負荷とした空調制御を考え,測定値や入力値から居住域平均温度 を出力するファジィモデルを作成する.測定可能なデータを人体負荷分布,吹出 し温度,吹出し風量,センサー温度とその位置とし,予測するデータを居住域平 均温度とする.ここで,人体負荷分布( 客席位置) は使用用途毎にあらかじめ決め られているため,人体負荷分布は別扱いとする.以上より,ファジィモデルは入 力変数を吹出し温度,センサー温度,吹出し風量,温度センサー位置( 3次元成 分) ,出力変数を居住域平均温度とする6入力1出力となる.さらに非等温流れ 場の浮力の影響は空調に用いる温度域においては温度差にのみ依存するため,吹 出し温度とセンサー温度との差は熱負荷と線形な関係となる.よって,入力変数 を吹出し温度とセンサー温度との差,吹出し風量,温度センサー位置の5入力と することができる.図 2 - 4 に C F D 解析データとファジィモデルの入出力変数を示 す .
Travr
a ) 定常 C F D 解析で得られるデータ( 網掛けは C F D 解析の出力値)
T0 Q x y z
Tr(x,y,z)
FM* Travr
b ) ファジィモデルの入出力データ
dT0(x,y,z) Q
x y z
FM*
c ) 浮力による温度特性を考慮したファジィモデルの入出力データ
ここ に、 q : 人体負荷
モード : 人体負荷分布 T0 : 吹出し温度
Q : 吹出し風量 x : 空間の位置座標 y : 空間の位置座標 z : 空間の位置座標
Tr(x,y,z) : (x,y,z)での温度 Travr : 居住域平均温度 dT0(x,y,z) : =T0-Tr(x,y,z) q モ ー ド T0 Q x y z Tr(x,y,z)
( 網掛けデータは前処理で作成)
( 網掛けデータは前処理で作成)
図 2 - 4 C F D 解析データとファジィモデル入出力変数
* F M は各モードごとに作成( F M : ファジィモデル)
2 . 3 . 2 制御アルゴリズム
提案する制御法( 以下,F M - P I D 制御とする) は,ファジィモデルを用いてあらか じめ居住域の平均温度を推定し,居住域平均温度が目標値となるように制御を行 うもので,用いるファジィモデルは前項の入力変数を計測または入力することに より居住域平均温度を推定する.居住域平均温度推定後の制御部はファジィ制御 をはじめ種々の方法が考えられるが,既設建物への導入の容易さから P I D 制御と する.図 2 - 5 に F M - P I D 制御の制御ブロック図を,表 2 - 3 に P I D 制御の基本式を示 す .
PID 制御部 制御対象
検出部 ファジィ推論部
目標値
外乱( 人体負荷)
Trave T0
Tsns (XTsns,YTsns,ZTsns)
T’rave +
-
ここに、 T0 : 吹出し温度 Q : 吹出し風量 Tsns : 室温センサー温度
(XTsns,YTsns,ZTsns) : 室温センサー位置 Trave : 居住域平均温度
T’rave : 居住域平均温度推定値 Q
図 2-5 FM-PID 制御ブロック図
表 2-3 PID 制御
・・・(14)
( ) ( ) ( ) ( )
÷÷ø çç ö
è
æ + +
= K e t T
ò
e d T dedttt
m t D
I
p 0
1
t t
ここで、
t:時間
( )
tm :制御出力, e
( )
t :偏差 (=目標値-現在値), Kp:比例ゲイン, TI:積分時間, TD:微分時間第3章 定風量方式
3 . 1 緒言
定風量(以下,CAV とする. CAV:Constant Air Volume)方式は最も古典的な空 調方式であり,大空間やクリーンルームなどの比較的特殊な空間に現在も多く採 用されている.定風量方式は吹出し風量を一定とし,吹出し温度を制御する方式 で,以下のような利点がある[ 5 3 ] .
・換気量を定常的に十 分確保できる.
・風量が十分かつ安定 しているため,温湿度・気流分布・空気質等に関し安 定した質の高 い空調ができる.
・設備費が廉価で保守管 理が容易である.
また,欠点としては以下が 挙げられる.
・室温制御用温度センサーの設 置位置が決めにくい.
・年間を通して最大負 荷に対応可能な送風 量で空調するため ファンの搬送動 力消費量 が大きい.
このような理由から,ほとんどの大空間では C A V 方式が採用されている[ 5 4 - 5 7 ] .また,吹出し温度の制御は温度センサーを用いた P I D 制御が一般的である が,温冷感指標である S E T*制御や P M V 制御が一部で試みられている[ 5 8 ] . そこで,本章では大空間で最も一般的に用いられている C A V 方式において,制 御対象をドーム球場とした場合の,F M - P I D 制御の制御性を P I D 制御と比較するこ とと する .
3 . 2 C A V 方式の制御
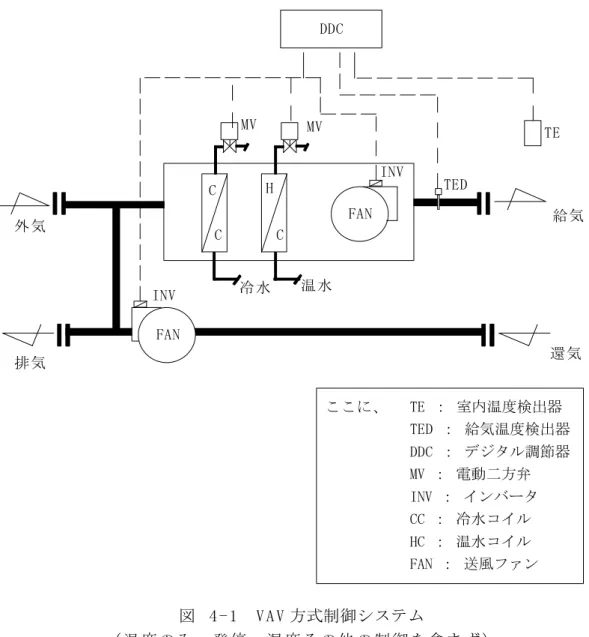
図 3 - 1 に C A V 方式の空調機周り制御システム( 温度のみ) を示す.室内あるいは 吸込み口に取り付けられた温度センサーの計測値を用いて調節器( 図中,D D C ) に て冷水コイル,温水コイルの電動二方弁( 図中,M V ) の開度を調整し,吹出し空気 温度を制御する.なお,図中には示していないが,換気量確保のために一定量の 外気導入と,排気を行う必要があり,外気導入及び排気用のダクトにはダンパが 必要である.また,コイル能力の選定の際,吹出し温度の上下限値を設定する必 要があり,本制御シミュレーションでは通常の空調設計で一般的に用いられる値 である設計温度± 1 0 ℃とする.
図 3 - 1 C A V 方式制御システム
(温度のみ、発停・湿度その他の制御を含まず)
DDC
MV MV TE
C C
H C
冷水 温水
FAN 給気
還気 外気
排気
ここに、 TE : 室内温度検出器 DDC : デジタル調節器 MV : 電動二方弁 CC : 冷水コイル HC : 温水コイル FAN : 送風ファン
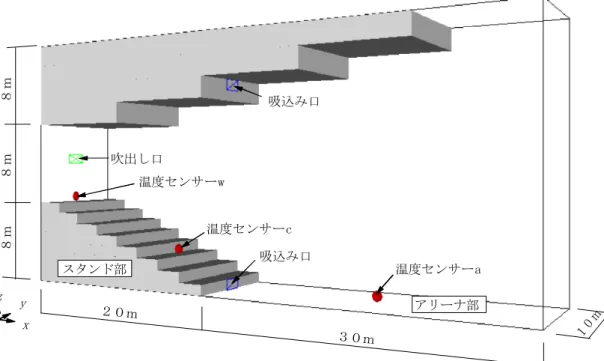
図 3- 2 制御対象
吹出し口
吸込み口
吸込み口 温度センサーc 温度センサーw
温度センサーa スタンド部
アリーナ部 20m
30m
8m8m8m
10m x
z y
3 . 3 制御対 象及び シミュ レーシ ョン条 件
3 .3.1 制御対象
図 3 - 2 に示すドーム球場の1スパンを制御対象とする.寸法は 5 0 m ( L ) × 1 0 m ( W )
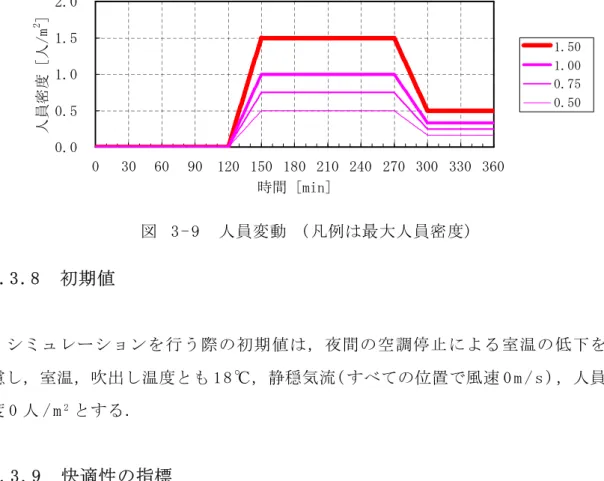
× 2 4 m ( H ) で,スタンド部とアリーナ部を設ける.空調は吹出し口をスタンド部後 方に 1 箇所,吸込み口を天井とスタンド前方に各 1 箇所設置し,吹出し方向は水 平とした.各制気口の風量・寸法を表 3 - 1 に示す.温度センサーは無線センサー を想定してアリーナ部中央に設けた場合( 図 3 - 2 中,温度センサー a ),スタンド 部に設けた場合( 図 3 - 2 中,温度センサー c ),スタンド部後方の壁面に設けた場 合( 図 3 - 2 中,温度センサー w )の3通りとする.さらに使用用途として図 3 - 3 に 示すモード A ( 競技観戦時) ,モード B ( コンサート時) ,モード C ( 小集会) の3通り の人体負荷分布を想定する.また空調期間を冬期,設定温度を 2 2 ℃とし,人体負 荷の増加とともに暖房から冷房へと変化する空調空間の制御性を検討することと する.なお,モード A の居住域はスタンド部床上高さ 2 . 0 m まで,モード B の居住 域はスタンド部とアリーナ部の床上高さ 2 . 0 m まで,モード C の居住域はアリーナ 部高さ 2 . 0 m までとする.
図 3 - 3 人体負荷発生位置 (a) モード A
(b) モード B
(c) モード C 人 体 負 荷 人 体 負 荷
人 体 負 荷
寸法 [m] 風量 [m3/h]
吹出し口 2.0×1.0 18,750 吸込み口(上部) 2.0×1.0 3,750 吸込み口(下部) 2.0×1.0 15,000
表 3 - 1 吹出し・吸込み条件
期間 冬期
用途 モードA, モードB, モードC 人員密度[人/m2]† 0.0,0.5,1.0,1.5,2.0,2.5,3.0
熱通過負荷[W/m2] 50 (天井部)
空間分解能 18(x)×5(y)×22(z) = 1,980 セル 注 † 人体負荷発熱量は70 W/人(顕熱のみ)とした。
3.3.2 CFD 解析条件
ファジィモデル構築用データの作成と制御シミュレーションはすべて C F D 解析 により行うこととする.C F D 解析は,2 . 2 . 2 ,2 . 2 . 3 項で示したとおり乱流モデル をk - ε型 2 方程式モデル,解法を構造格子系の有限体積法による S I M P L E C 法と し,差分スキームは運動方程式の移流項のみ Q U I C K スキームとする.計算メッ シュ数は 1 ,9 8 0 セル,壁面境界条件は図 3 - 1 に示す X Z 面の両側とアリーナ側の Y Z 面にフリースリップ,他は対数則とし,人体負荷は床上第 1 セルの流体中に体 積発熱させる.制御シミュレーションにおける非定常解析時の時間間隔は,クー ラン条件[ 5 9 ] をほぼ満足する 0 . 2 5 s とする.
3 . 3. 3 ファジィモデル用データ
C F D を用 いた 定常 解析 によ り,ファ ジィ モデ ル構 築用 のデ ータ を作 成す る.
モード A ,モード B ,モード C それぞれについて,人体負荷を 0 . 0 ~ 3 . 0 人 / m2ま でとした 7 通りの C F D 解析を行う.人体負荷は顕熱のみを考慮し,7 0 W / 人[ 6 0 ] を,
冬期の想定として暖房熱通過負荷 5 0 W / m2を天井面に一定値として与える.C F D 解 析条件を表 3 - 2 に示す.
表 3 - 2 ファジィモデル作成用 C F D 解析条件
3 .3 .4 ファジィモデル
前項で得られた C F D 解析結果からファジィモデルを構築する.まず,制御対象 の特性に合わせて不要な入力変数を削除する.必要な温度分布は居住域のみであ ることから,3 次元成分の温度分布データを床面第一セルのみの 2 次元データと して抽 出し ,さらに 各温 度セ ンサ ー位 置の y 座標が 等し いこ とか ら,温度セ ン サー位置は x 方向のみとなる.また,C A V 方式では吹出し風量は一定であるため,
最終的に 2 . 3 . 1 項に示した 5 入力 1 出力ファジィモデルは,センサー温度と吹出 し温度の差,温度センサー位置 x の 2 つを入力変数,居住域平均温度を出力変数 とした 2 入力 1 出力のファジィモデルとなる.モデリングの終了条件は試行錯誤 の結果から,後件部変数の最大誤差が 2 % 以下となった場合とする.なお,誤差は 後件部変数の最大値から最小値を引いた値で標準化した値である.得られたメン バーシップ関数を図 3 - 4 に示す.図に示されるメンバーシップ関数が密に分割さ れている部分が非線形性の強い出力データが存在する部分であり,居住域平均温 度と吹出し温度との差に対してはすべてのモードで冷房側に多い.X 方向位置に 関しても全モードでスタンド部側に多いことから,冷房時のスタンド部で非線形 性の強い出力データが存在していることが分かる.このようにメンバーシップ関 数の分割配置からデータの大局的な特性が把握できることがファジィモデルの特 徴の一つとなっている.図 3 - 5 ~ 7 に各モードにおける定常 C F D 解析とファジィ モデルの入出力関係を示す.モード A での定常 C F D 解析結果( 図 3 - 5 ( a ) ) は,それ ぞれの位置( 以下,x とする)において吹出し温度と x での温度との差( 以下,d T 0 とする)が 4 ℃の時,吹出し温度と居住域平均温度との差( 以下,d T r とする)が 4 ℃で同じとなっており,x における d T 0 と d T r の関係はほぼ線形となっている.
直線の傾きは x が 8 . 7 5 m でほぼ 1 となっており,x が小さいほど小さい値を示す.
これらの入出力関係に対し,ファジィモデル出力値( 図 3 - 5 ( b ) ) もほぼ同様の傾向 を示し高精度に入出力関係をモデリングしているが,d T r が - 8 ℃付近でのすべて の x の d T 0 が - 10 ℃となっていること,x が 1 6 .2 5 ~ 2 8 .7 5 m で d T 0 が - 5 ℃付近で 線形にならないことが相違点として挙げられる.前者は初期メンバーシップ関数 を固定値としてモデリングを行ったためであり,後者は x が 1 6 . 2 5 m 以上,d T 0 が 約 - 5 ℃以上,d T r が - 5 ℃以下の領域にデータが無いためにメンバーシップ関数を
0 1
-6.35 4.13
0 1
1.25 48.33
0 1
-15.42 4.13
0 1
1.25 48.33
0 1
-12.79 4.08
0 1
1.25 48.33
dT
x
dT
x
dT
x
( a ) 吹出し温度と位置 x での温度との差 ( モード A )
(b) 位置 x (モード A)
( c ) 吹出し温度と位置 x での温度との差 ( モード B )
(d) 位置 x (モード A)
( e ) 吹出し温度と位置 x での温度との差 ( モード C )
(f) 位置 x (モード A)
図 3 - 4 各前件部変数のメンバーシップ関数
-8 -6 -4 -2 0 2 4 6
-12 -10 -8 -6 -4 -2 0 2 4 6
吹出し温度と位置xでの温度との差[℃]
吹出し温度と居住域平均温度との差 (dTr)[℃]
1.25 3.75 6.25 8.75 11.25 13.75 16.25 18.75 21.25 23.75 26.25 28.75 31.67 35 38.33 41.67 45 48.33 位置x[m]
(a) 定常 CFD 解析
( b ) ファジィモデル
図 3 - 5 モード A における入出力関係
-8 -6 -4 -2 0 2 4 6
-12 -10 -8 -6 -4 -2 0 2 4 6
吹出し温度と位置xでの温度との差[℃]
吹出し温度と居住域平均温度との差 (dTr)[℃]
1.25 3.75 6.25 11.25 16.25 18.75 21.25 23.75 26.25 28.75 38.33 48.33 位置x[m]
分割していく過程で x = 1 6 . 2 5 m の値を参照しながら後件部実数値を線形補間して求 めたことが原因と考えられる.この領域には入出力データが存在しないため計算 上誤差として検出することは困難である.本研究では x が 1 6 . 2 5 ~ 2 8 . 7 5 m での温 度センサー位置は設定していないため制御シミュレーションには影響を与えない が,精度を求めるために収束判定条件を厳しくしてメンバーシップ関数を密に分 割すると,逆にこのように入出力データが存在しない場合が生じ,検出困難な誤 差を生じることに留意する必要がある.モード B での定常 C F D 解析結果( 図 3 - 6
-20 -16 -12 -8 -4 0 4 8
-24 -20 -16 -12 -8 -4 0 4 8
吹出し温度と位置xでの温度との差[℃]
吹出し温度と居住域平均温度との差 (dTr)[℃]
1.25 3.75 6.25 8.75 11.25 13.75 16.25 18.75 21.25 23.75 26.25 28.75 31.67 35 38.33 41.67 45 48.33 位置x[m]
(a) 定常 CFD 解析
( b ) ファジィモデル
図 3 - 6 モード B における入出力関係
-20 -16 -12 -8 -4 0 4 8
-24 -20 -16 -12 -8 -4 0 4 8
吹出し温度と位置xでの温度との差[℃]
吹出し温度と居住域平均温度との差 (dTr)[℃]
1.25 3.75 6.25 8.75 16.25 18.75 21.25 23.75 38.33 48.33 位置x[m]
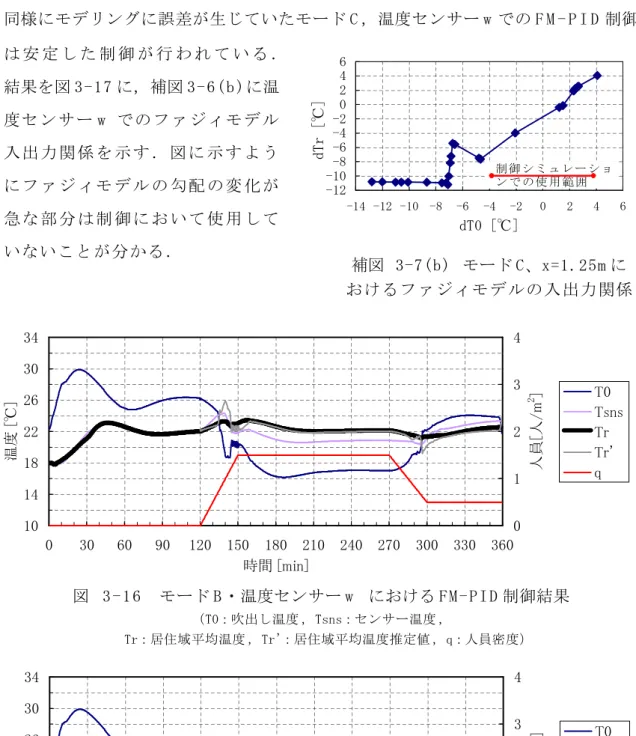
( a ) ) は,d T 0 と d T r が 0 ℃の位置で交差しており,傾きは x が小さいほど大きく なっている.また,交差点において線形性が崩れており,その傾向は x が小さい ほど大きい.ファジィモデル出力値(図 3 - 6 ( b ) ) も上記の傾向を再現しており,
本モデリング手法が入出力データの関係を高精度に表現できることが分かる.た だし,x が 1 . 2 5 m で d T 0 が - 1 3 ℃付近の線形性が著しく定常 C F D 解析値と異なって おり,これはモード A と同じ理由によると考えられる.なお,x が 1 . 2 5 m の位置 は温度センサー w であるが,実用的な空調吹出し温度差は 1 0 ℃より小さいため,
![図 3 - 3 人体負荷発生位置 (a) モード A(b) モード B(c) モード C人 体 負 荷人 体 負 荷人 体 負 荷寸法 [m] 風量 [m 3 /h]吹出し口2.0×1.018,750吸込み口(上部)2.0×1.03,750吸込み口(下部)2.0×1.015,000表 3 - 1 吹出し・吸込み条件](https://thumb-ap.123doks.com/thumbv2/123deta/7735804.1711810/30.892.203.718.168.279/人体負荷発生位置モードモードモード体負荷人体負.webp)
![図 5 - 6 モード A ・温度センサー a における C O 2 濃度制御を考慮した F M - P I D 制御の温度分布・風速ベクトル(a)0.5min(空調開始) (b)60min(予熱中)(c)120min(予熱終了、開場)(d)150min(開演)(e)210min(興業中) (f)270min(興業終了)(g)300min(人員減終了)(f)360min(人員 33%) 温度[℃] 25 24 23 22 21 20 19は,空調開始から制御終了まで時計回りの循環流を形](https://thumb-ap.123doks.com/thumbv2/123deta/7735804.1711810/81.892.124.759.304.1113/モード温度センサーにおける濃度制御考慮P制御温度ベクトル.webp)
![図 5 - 7 モード B ・温度センサー a における C O 2 濃度制御を考慮した F M - P I D 制御の温度分布・風速ベクトル(a)0.5min(空調開始) (b)60min(予熱中)(c)120min(予熱終了、開場)(d)150min(開演)(e)210min(興業中) (f)270min(興業終了)(g)300min(人員減終了)(f)360min(人員 33%) 温度[℃] 25 24 23 22 21 20 19分布が高くなっており,吹出し風量の減少により応答](https://thumb-ap.123doks.com/thumbv2/123deta/7735804.1711810/82.892.123.761.301.1119/モード温度センサーにおける濃度制御考慮Pベクトルにより.webp)
