九州大学学術情報リポジトリ
Kyushu University Institutional Repository
大きな斜航角を伴う船の操縦流体力に関する研究
田中, 進
大きな斜航角を伴う
船の操縦流体力に関する研究
第1章 緒論
1.1
概説目 次
. . . . . . . . . . .
..
..... . . .
1.1.1
本研究の背景 • • • • • • • • • • • • • • • • • • • • • • • • • • •1
1.1.2
船の操縦性能推定法 .• • • • • • • • • • • • • • • • • • • • • •2
1.1.3
大斜航角を伴う船の操縦運動計算法の現状.• • • • • • • • •3
1.2
大斜航角を伴う船の操縦流体力に関する研究の経緯と現状 .• • •5
1.3
本研究の流れ.• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •8
第2章 2次元断面に作用するcross flow dragの理論計算法
9
2.1
緒言 . • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •9
2.2
流場のモデル化および境界条件式 .• • • • • • • • • • • • • • • • • •12
2.3
境界積分方程式 .• • • • • • • • • • • • • • • • • • • • • . • • • • • • •14
2.4
流体力の算定.• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •16
2.5
境界積分方程式の数値解法 .• • • • • • • • • • • • • • • • • • • • • •17
2.6
渦モデル .• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •20
2.6.1
渦の発生 .• • • • • • • • • • • • • • • • • • • • • • • • • • • • •20
2.6.2
渦の移動.
• • • • • • • • • • • • • • • • • • • • • • • • • • • • •23
2.6.3
渦の拡散および減衰 .• • • • • • • • • • • • • • • • • • • • • •24
2.7
渦モデルに含まれる諸係数の決定 .• • • • • • • • • • • • • • • • • •26
2.7.1
剥離点の位置 • • • • • • • • • . • • • • • • • • • • • • • • • • •26
2.7.2
渦の発生位置および循環の相殺量 .• • • • • • • • • • • • • •32
2.7.3
渦モデルに含まれる諸係数の決定法に関する検証 • • . • •36
2.8
結言 . • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •43
第3章 船体横断面に作用するcross flow dragの計算
45 3.1
緒言 . • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •45
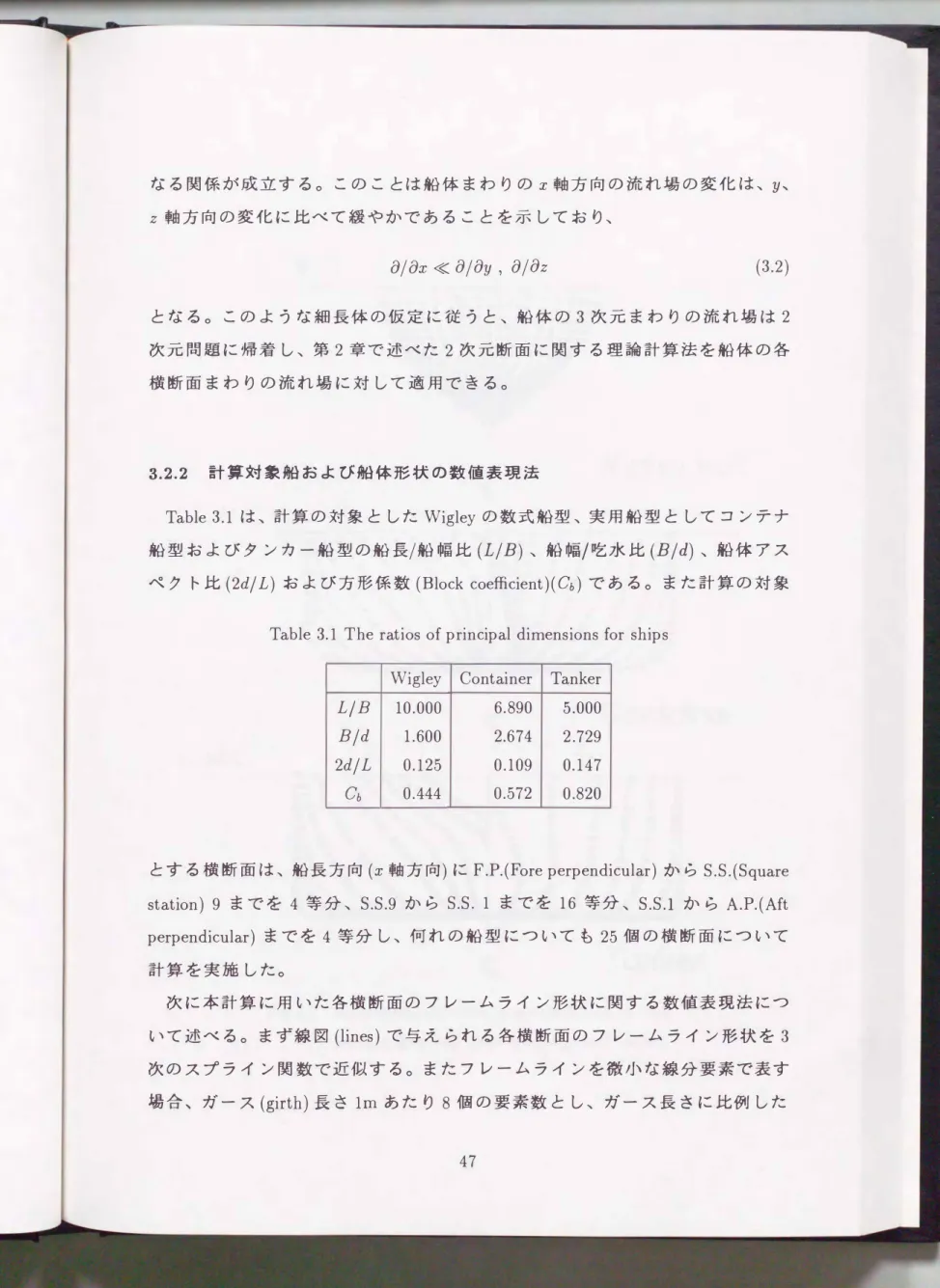
3.2
船体横断面に作用するcross flow dragの計算法.• • • • • • • • • • •46
3.2.1 細長体の仮定 . . . . . . . . • . . • . . • • • • • • • • • . . . , 46 3.2.2 計算対象船および船体形状の数値表現法 .. • . • . • . . . • 4 7 3.2.3 剥離点位置
.
• . • • . • • • • . • • • • • . • • . • . . . . . • • • 4 9 3.2.4 3次元影響 . • . . • . . . • . . • . • • . . . . . • . • . • . • .. 5 13.3 Cross flow dragの船長方向分布 .
• • . • . • . . • . . . . . . . . . • .5 4 3.4 結言 .
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •61
第4章 船体に作用するcross flow dragに及ぼす前進速度影響
63
4.1 緒言 . • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • 63
4.2 理論計算法 .
. . . • • . • • • • • • • . • • . • • • • . . . • . . . • . • • 65 4.2.1基礎式.
• • . . . • • . . . • • • • • • • . • . . . . . . . . . . • . 65 4.2.2渦モデル
.. . . • • • . • . . . . • . . . • • . . . . • . . . . ..70 4.2.3 境界積分方程式の数値計算法
.. . • . . . . . . . • . • . . . •74 4.3 数値計算例および考察 .
• • • • • • . • • . • . . . . • . • . . . . . • •77
4.3.1 計算対象船および船体形状の数値表現法 ..
. . . • . . . . • 774.3.2 渦モデルに含まれる諸係数の決定 .
• • . . . • . • . • . • • .78 4.3.3 船体のcross flow
dragに及ぼす前進速度影響 .. . • . . . • .81 4.4 結言 .
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •97
第5章 大きな斜航角を伴う船の操縦特性
99
5.1
緒言 . • • • • • • • • • • • • • • • • • • • • • • • • • • • . • • • • • • • •99
5.2大きな斜航角を伴う船の操縦運動数学モデル .. 103
5.4.2
理論計算による船体流体力微係数の決定 . • • • . • . . • • •114 5.5
数学モデルの検証 . . . . • • • • • • . • • • . • • . • . . • • • • • . •. 124 5.5.1
自走模型試験結果.
• • • . • • • • • • . . • • . . . • • • . •. . 124
5.5.2
シミュレーション計算と自走模型試験結果との比較. •. . . 130
5.6
大きな斜航角を伴う船の操縦特性に及ぼす船型の影響. .
. . •. .
1335.6.1 計算条件 .
• • • . . • • . . • • • • • • . . . • . • . • . . •134
5.6.2シミュレーション計算例および考察 .
. • . • . . . • . • . . •135 5.7 結言 .
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •141
第6章 結論 謝辞 記号一覧 参考文献
143
149
150
155
第1章 緒論 1.1 概説
1.1.1
本研究の背景1994年9月のフィンランド沖におけるフェリーI Estonia J号の座礁・沈没事 故、1989年3月のアラスカ沖におけるタンカーI Exxon Valdez J号の座礁・原 油流出等の事故が、多数の死者や行方不明者、あるいは重大な環境汚染をもた らしたことは記憶に新しいことである。 また、 日本近 海における要救助船舶に ついては、近年エンジンや舵の故障、 火災によるものは減少しているが、衝突 や座礁の場合が増加傾向にあるという海上保安白書の報告もある1)。
このような海難事故の原因は種々あると思われるが、一般的には操船者の誤 認や誤動作など乗組員に起因する事故、船体固有の性能不足に起因する事故、
そして突風や大波など不可抗力的な要因によるものが考えられる。 過去の統計 資料によると、 乗組員の見張り不十分、操船不十分等のいわゆる人間要素に起 因する事故が全体の70 %になるとの報告もあれば、船体強度、耐航性能、操縦 性能および復原性能等のいわゆる船体固有の要素に基づく事故は全体の約30
,-...;
35 %であるとの報告もある2)。ところが、海峡や運河、 港湾内あるいは沿岸域のように特に数多くの船舶が 率直接する水域においては、水深や水路幅が制限され且つ、低速での航行を余儀 なくされる場合が多く、また低速航行時には一般には舵効きも低下すると同時 に潮流や風等の外乱の影響を受け易い状態となるため、衝突や座礁等の海難事
性能に関するものの他、浅水域の操縦性能、風圧下における操縦性能、低速時 の操縦性能を示すことが要求されている。 さらにIMOでは、少なくとも船体固 有の操縦性能が不足したために生ずる海難事故だけは防止しようという目的か ら、操縦性能基準の策定について検討が進められ、1993年11月の総会におい てはその暫定基準が採択された5)。 その結果、船舶の初期設計の段階で船の操 縦性能を推定し、 またそれを評価することが従来にも増して重要なこととなっ
fこ。
また一方、船舶の専用船化が著しく進んだ結果、一般的に性能の良い船を建 造するというだけではなしその船が運航される港湾等の条件が明確に特定さ れるようになり、それを考慮してより具体的に運航の安全性および経済性を向 上させるように船を設計するという課題が造船設計者にとって一層重要となっ てきているの。 このような場合、船舶の設計時に操縦性能をかなり詳細に検討 し、港湾内で安全に運航される見通しを立てる必要がある。
以上のように、船舶の設計段階において、大洋中における通常航行時の操縦 特性のみならず、港湾域等における極めて低速で船が操船される状態での操縦 性能を如何に的確に推定するかが重要となる。
1.1.2
船の操縦性能推定法現在、船の操縦性能を初期設計の段階で推定する方法には、大別して
( 1 ) 過去の操縦性試験結果を基にしたデータベースによる方法
( 2 ) 模型試験を実施して操縦性能を把握する方法
( 3 ) 操縦運動に関する数学モデルを用いた数値シミュレーションによる方法
の3つがあるの。
まず
(
1)
のデータベースによる操縦性能の推定方法に関しては、船体要目等の 設計要素が性能に及ぼす影響について、経費や時聞をさほど伴うことなくマクロ的に捕らえることができる反面、 この方法の有効性がデータの絶対数と個々
のデータの精度に依存することになり、データベースの母集団の中に含まれて いない船型の性能を推定することは困難となる。
また
(
2)
の模型試験による推定については、実験結果より直接操縦性能を知 るという点では自由航走模型試験が適しているが、模型試験を実施するには経 済的、時間的にも困難なことが多い。 さらに自由航走模型試験の結果から実船 の操縦性能を推定するには、実船と模型船との相関の問題があり、 レイノルズ 数の相違によって船体まわり の流場 が実船と模型船で異なることに起因する尺 度影響を修正することが問題になってくる。 従って現在、模型試験による操縦 性能の推定については、既知の運動を模型船に与えて模型船に作用する流体力 を計測し、この計測結果を基に操縦運動の数学モデルに含まれている流体力微 係数や舵効きを表す諸係数を決定する拘束模型試験が一般に実施されている。これらの拘束模型試験あるいは理論計算によって船体に働く流体力が求めら れると、これを船の運動方程式に代入して、流体力微係数と舵効きを表す諸係 数を含めた操縦運動の数学モデルを用いることによって、船の運動を数値的に 時間領域において求めることが出来る。 この方法がいわゆる
(
3)
に示した数値 シミュレーションによる方法であり、設計段階における船型や一部の設計変更(
例えば舵面積の変更等)
に伴う操縦性能の変化を、流体力の成因に立ち戻って より合理的に船の操縦性能を推定することが可能となる。この数値シミュレーションによる方法に関しては、船が深水域を通常の速度 で航行する場合については、 その船の基本的な操縦性能であることから、精力 的に研究が進められてきた。 すなわち現在までに、深水域を通常の速度で航行
頭の三つの運動が同じオーダーになるため、船の横流れ運動や回頭運動が前進 運動に比べて小さいとの仮定のもとに導かれた上述の操縦運動の数学モデルお よび流体力を表す諸係数とは大幅に異なってくる7)。
また昨今の船の操縦性研究に対する要請は極めて具体的であり、 複雑多様な 操船がなされる港湾域における操縦運動を取り扱うことのできる数学モデルの 実用化を促している。 このような状況の中、横流れ運動や回頭運動が前進運動 と同じオーダーかあるいは前進運動よりも大きい局面を対象とした低速時の数 学モデルが幾っか提案されている8) ,... 15)。 これらの数学モデルは目的に応じて 多種多様であるが 、何れの数学モデルの諸係数値もそれぞれの数学モデルに適 した詳細な拘束模型試験から得られたものである。 従って少なくともそれぞれ が対象とした特定の船型に対しては 、何れの数学モデルを用いても低速時の操 縦性能を十分予測できるものとなっている。 しかし各数学モデルの構造にもか なりの開きがあり、 どのモデルが操縦運動の予測に適しているかといった議論 はまだできる状況にはない。 また、流体力を表す諸係数の推定法についても 、 種々の船型を対象とした横流れ運動や回頭運動が大きい場合の船体に作用する 流体力に関する理論的な研究が望まれるところである。
1.2 大斜航角を伴う船の操縦流体力に関する研究の経緯と現状
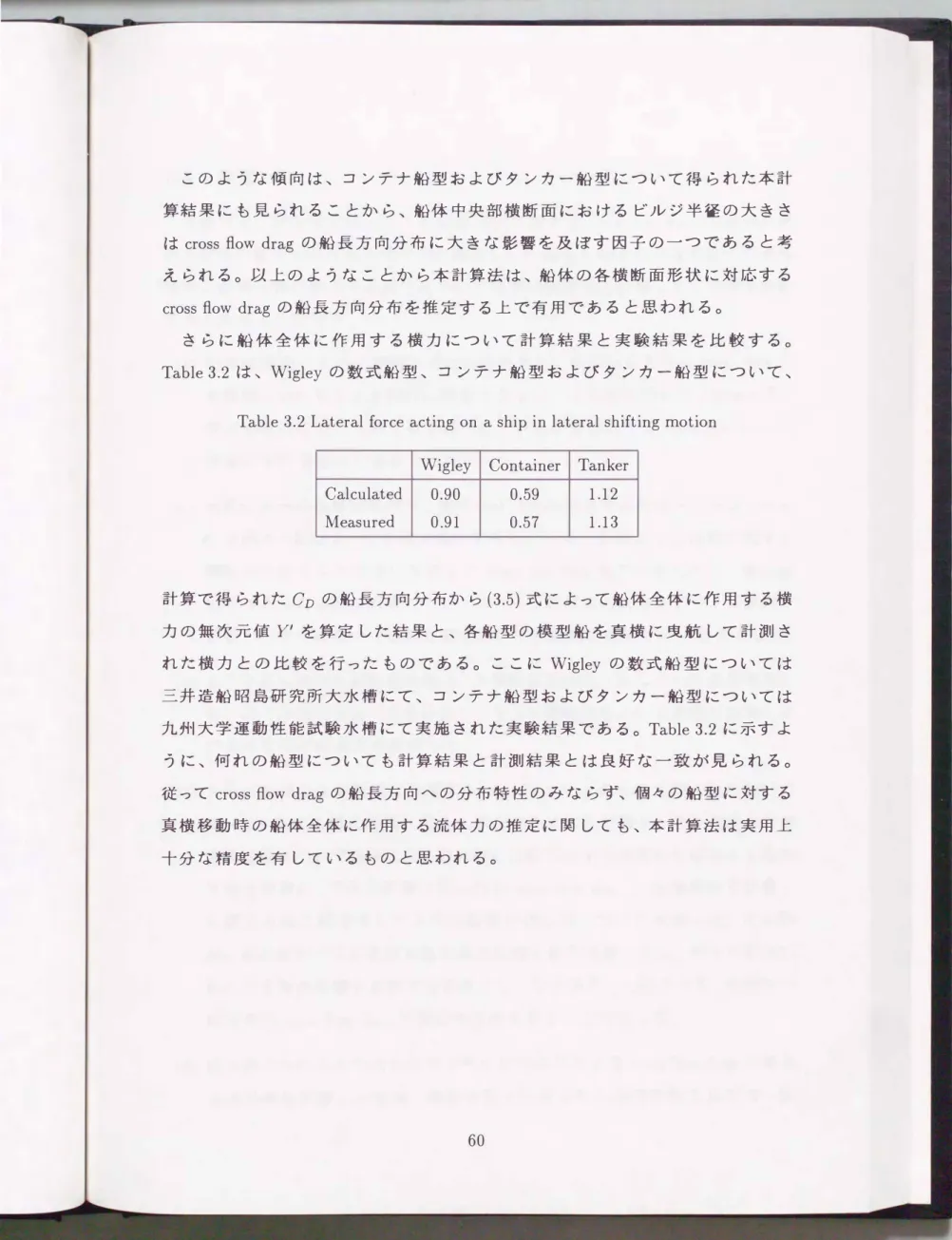
港湾内を低速で航行中の船舶が離着岸する場合等、船が大きな斜航角を伴っ て運動する時の船体に作用する流体力は、揚力に基づく成分よりもcross flow
dragに基づく成分が支配的となることが知られている。このcrossflow dragは、
水の粘性影響により船体横断面まわりの流線が途中で剥離することに起因して 船体に作用する動圧損失による抵抗成分である。
このようなcrossflow dragに基づく船体に作用する流体力に着目し、 松本ら 16)は船体を船長方向に10分割した模型船を用いて拘束模型試験を行い、各分割 ブロックに作用する流体力を計測することによって、船体に作用するcrossflow
dragの船長方向への分布を実験的に求めている。また01tmann8)、烏野ら13)、芳 村14)、梅田15)は、拘束模型試験で計測した大斜航角を伴う船体に作用する流体 力を、 FedyaevskyとSobolovが示したcrossflow dragの概念17)を基にした数学モ
デルで表現する方法について示している。
一方、操縦運動時の船体に作用する流体力に関する理論的な研究について は、これまで船の前進運動が横流れ運動や回頭運動に比べて相対的に大きく、
船体に作用する流体力は揚力を主成分とする場合について多くの研究が行われ ている。 平水中において前進、横流れおよび回頭運動している時の船体に作用 する流体力のうち、船体の加速度に比例する力は流体の慣性による力が主であ るが、速度に比例する力は流体の粘性による影響を強く受けるために、 複雑な 曲面を持つ船体まわりの流場を直接計算することは、一般には非常に困難であ
流体力を解析的にあるいは数値的に求める方法が実用化されている20)。現在用 いられている流れ模型は、大別して小縦横比揚力面理論21)- 22)と細長体理論 16)23)-31)がある。前者は船体を中央縦断面に相当する縦横比の非常に小さい薄 翼として取り扱うもので、船体に作用する揚力を対象にする場合には根本的に は前者の揚力面として取り扱う方法が合理的であると思われるが、流れ模型の 性質上、船体形状とりわけ船幅影響を考慮することが難しい。一方後者は、船 体を細長体とみなして船体近傍の流れを単純化して考え、操縦運動時の船体横 断面まわりの2次元流れとして取り扱う方法である。ところが剥離渦の流出条 件が必ずしも明確ではないことから、実験値との比較等によって剥離に関する 諸係数を定める必要があるものの、最近の改良された細長体理論による計算法 は、船体形状の細かな違いによって生ずる操縦流体力の変化を把握することも
可能になりつつある32)。
このように操縦運動時の船体に作用する流体力の理論的な研究については、
船の前進運動が相対的に大きく、船体に働く流体力は揚力が支配的である場合 を対象として多く行われている。しかし船の横流れ運動や回頭運動が前進運動 に比べて相対的に大きくなる場合を対象とし、理論的にcross flow dragに基づ く流体力成分を推定する方法について詳細な検討を行った研究は、これまでほ とんど行われていないように思われる。
また設計の初期段階における個々の船舶に対して、港湾域等における操縦性 能を数値シミュレーションによって検討する場合、数学モデルに含まれる流体力 の諸係数が具体的に分れば、所用の時々刻々の船の操縦運動を計算で求めるこ とができるが、これらの諸係数をどのように求めればよいかが問題となる。諸 係数を求める方法としては、拘束模型試験、諸係数に関するデータベースある いは理論計算による方法がある。
拘束模型試験による方法は、諸係数を求める上では最も直接的な手法である。
しかし検討段階では時間的な制約もあり、対象船舶に関する拘束模型試験を実 施できないのがむしろ一般的である。 従って諸係数に対して船型要素を反映し たデータベース、あるいは数式化された近似推定式があれば非常に便利である と思われる。 ところが大斜航角時の流体力データについては、通常操船時の場
合の流体力データほどの蓄積はないことから、 データベース化あるいは近似推 定式作成のためには、 更なるデータ収集を行う必要がある。 従って可能な限り 船体形状を考慮しつつ、 大斜航角を伴って運動する場合の船体に作用する流体 力を理論的に推定できる実用計算法の開発が強く望まれているのが現状である と思われる。
そこで本論文では、 大斜航角時の船体に作用するcross flow dragに基づく流 体力を理論的に計算する方法について提案する。
1.3 本研究の流れ
本論文は次の6つの章から構成される。
第1章は緒論で、本研究の背景、概要、目的および構成について述べている。
第2章では、船が大きな斜航角を伴って運動する時の船体に作用する流体力 は、船体横断面のcross flow dragに基づく成分が支配的となることから、 任意 形状を有する2次元断面まわりの非定常な剥離流れ に着目し、2次元断面まわ りの流れ を流体力学的に簡略化した流れ 模型(渦モデノレ)に置き換える手法を用 いて断面に作用するcross flow dragを求める方法を示す。
第3章では、第2章で述べた2次元断面に対する計算法を基に、実際の船体 に作用するcross flow dragを求める方法について提案する。 また本計算法の妥 当性を検証するため に、実用船型の各横断面に作用するcross flow dragを計算 し、 その船長方向分布あるいは船体全体に作用する流体力に関して計算結果と 模型試験結果を比較する。
第4章では、第2章および第3章で示した船体に作用するcross flow dragの 計算法を、細長体理論を基に船が前進速度を有する場合に拡張し、船が任意の 斜航角を伴って運動する時の船体に作用する流体力の理論計算法を提案する。
さらに本計算法を実用船型に適用し、 任意の斜航角時における船体に作用する 流体力特性について計算結果と模型試験結果との比較検証を行う。
第5章では、前章までの方法で計算される船体に作用する流体力の妥当性を、
船の操縦運動の場で検証することを目的として、まずcross flow dragの 概念に 基づく 船の操縦運動数学モデルを導く。 次に流体力の計算値を用いて数学モデ ルを具体的に記述し、 大きな斜航角を伴う局面を対象とした船の操縦運動を数 値シミュレーションで求め て自走模型試験結果と比較する。 さらに本流体力計 算法の造船設計あるいは操船設計への応用の可能性について考察するため に、
個々の船型ごとに計算した船体流体力を用いて数値シミュレーションを行い、船 型と操縦運動特性との関連を調べる。
第6章は、本研究を通じて得られ た結論を示す。
第2章 2次元断面に作用するcross flow dragの理論計算法 2.1 緒言
船の操縦性能の推定に際して重要な役割を演ずる船体に作用する横力 は、斜 航および回頭運動 時の船体の背面側に生ずる剥離渦に由来する。斜航時の船体 まわりの流れ 場に関する実験的研究によれば、船体の前進運動(あるいは後進 運動)が横 流れ運動に比べて十分に大き い状態においては、船体の背面側に、翼 が迎角を持って進行する時に翼端から発生する剥離渦に類似 した、 ビルジ渦等 の3次元 剥離渦を有 しており、船体に働く 流体力 は揚力に基づく成分が支配的 となる33)34)。しかし 船体の横 流れ運動が次第に大き くなって船体が真横に運動 する状態に近くなると 、船体 横断面まわりの流れ は2次元 的に剥離し 、動圧損
失いわゆるcross flow dragに基づく成分が主要となる8)15)。
この船体の横断面まわりのcross flowは、一般的には流体力学的に鈍い形状 を有する2次元断面まわりの高レイノルズ数領域での流れであり、大きな剥離
域を伴う非定常流れとなる。
このような高レイノルズ数領域における剥離を伴う 2次元物体まわりの流れ を数値的に解析する方法の一つに、事j離渦を渦点の配列によって近似するいわ ゆる離散渦法がある35)。離散渦法 は、差分法や有限要素法に比べて高レイノル ズ数領域の流れの計算に適しており、また計算原理、計算 手順が比較的簡便で あること等から、平板、角柱 、円柱 あるいは翼型等に働く 流体力の解析にしば しば利用されている。従来の離散渦法では、任意断面まわりの流れを円断面ま
動流中 、定常流中の2次元平板および定常流中の正角柱まわりの流れを解析し ている。 またLewis38) 、坂田ら39)、稲室ら40)、林ら41)、 宮本ら42)は何れも、断 面の表面上に離散的な束縛渦あるいは束縛渦の連続分布を用いた離散渦法によ り、自動車や桁橋の断面等、平板、矩形および台形断面を組み合わせた基本形 状まわりの流れを調べている。
しかしな がらこれらの計算において必要となる剥離点位置や剥離渦の強さの 決定方法すなわち渦モデルに関しては、研究者や対象とする断面形状によって 種々異なっている。 従ってこれらの手法を実際の船体横断面に適用しようとす る場合 、船体の横断面形状は船首部から船尾部までの船長方向位置、あるいは 個々の船ごとに多種多様に変化しているため、船体横断面形状をより正確に考 慮しつつも、弱j離点位置や剥離渦の強さを統一的かっ簡便に決定で きる実用的 な計算法の開発が望まれるところである。
そこで本章では、稲室ら40)が示した特異点分布法と離散渦法を組み合わせた 2次元断面まわりの剥離を伴う非定常流れの計算法を基に 、船体の2次元横断 面に働く cross flow dragを、船体横断面のフレームライン形状を出来るだけ考 慮すると共に 、種々の断面を取り扱う際に必要となる剥離点位置や剥離渦強さ を簡便に指定する方法について検討する。
まず第2節においては、任意形状を有する横断面まわりの高レイノルズ数領 域における非定常な剥離流れについて 、2次元非圧縮非粘性流体および自由表 面を固定壁と考えた場合の支配方程式および境界条件式を示す。
第3節では、横断面を連続する束縛渦分布で置き換えEつ剥離点、から後流に 出る剥離渦を自由渦の配列によって近似して表した場合の横断面上の束縛渦強 さに関する境界積分方程式を導く。
第4節では、第3節で示した境界積分方程式を解いて得られる流場から 、断 面に作用するcross flow dragを計算する方法について述べる。
第5節においては、第3節で得られた境界積分方程式の数値解法を示す。
第6節では、剥離渦を自由渦の配列で置き換える場合の渦モデルについて述 べる。
第7節では、 前節で示した渦モデル中に含まれる剥離点位置や渦の発生位
置等を表す諸係数の決定法について検討する。 具体的にはまず、 滑らかな物体 の基本形状である円柱に本渦モデルを適用して、 剥離点位置と円柱に作用する cross flow dragとの関連について調べる。次に、 剥離点位置の明確な正角柱およ び平板を対象に渦の発生位置や循環の相殺量について考察する。 さらに剥離点 位置の明確さの度合いが異なり、 かつ実際の船体中央部付近の横断面形状に類 似するかどに丸みを有する正角柱に対して本渦モデルを適用し、 剥離点位置、
渦の発生位置および循環の相殺量の決定法も含めて本計算法の妥当性について 検証する。
第8節は本章で得られた結果をまとめる。
2.2 流場のモデル化および境界条件式
いま船体のように細長く断面が鈍い形状を有する浮体が、一定速度Uにて真 横に移動する場合の2次元横断面まわりの流れについて考える。 この時、Uが
十分に小さい場合には水面に生ずる波(造波)は小さく、 水面は固定壁として考 えることができる。 この固定壁を鏡像面として浮体を二重模型(DoubleBody) として取り扱うと、二重模型が無限流体中を運動する時の問題となる。Fig.2.1 に示すように、 横断面内に固定の座標系0-y,zの原点を二重模型の断面の中 心に置き、一様流の方向にy軸、 それと鉛直方向にz軸をとる。 一般に鈍い形
--
-ーーーーーーー一ーーーーーー-ーーーーーー一ーーー ーーー-
/ / ー\
n f
u
3一 一-=-
\ \
\、
\ \
"-_、
一豆一
ー-
../'
、.._
-ーーーーーーーーーーーーーーーーーーーーーーーーーー・ー'ーーーーーーーー『ーーーー『Fig.2.1 Coordinate systern
〆-/ / /
状物体(BluffBody)まわりの流れは、流れが剥離して後流に大きな伴流域を形 成するが、 高レイノルズ数領域における流れの場合の伴流は非常に薄い剥離渦 層となる。 この時、剥離渦層以外で流体は非粘性、 非圧縮、非回転であるとす れば、 速度ポテンシャルφ(払z;t)が存在し、 支配方程式として流体の連続の式 であるLaplaceの方程式
θ2 φ(y,z;t) I θ2 φ(y ヲ z; t) - ()
一 一 -
ðy2 I δZ 2 (2.1 )
るな
・つよの次中ゐ件条界境
す表を 。 間
=
時
B
十品
s
t
φ
一
η
で θ
一δ
な・りな
JAS
れゐノなし足満を(2.2)
!日x (安
一割l
s j+=p-lsw ,祭 |
sw=0(2.3)
(�:r + (��)→U吋2 + Z2→∞ (2.4)
ここでSß,Swはそれぞれ、 物体表面、 剥離渦層表面を表し、nは物体表面
・剥
離渦層表面における外向き単位法線ベクトル、んは単位接線ベクトルとする。また、心は渦度ベクトル、φ+。ーはそれぞれ剥離渦層の上下面の速度ポテンシャ ル、p+,pーは剥離渦層の上下面の圧力を表すものとする。 すなわち(2
.2)式は流
れが物体表面を貫通しないという条件であり、(2.3)式は接線速度の不連続が剥 離渦層に対応し、 剥離渦層を貫く流れがないという運動学的条件と剥離渦層の 上下面で圧力が等しいという力学的条件を示している。 さらに(2.4)式は、無限 遠方では物体による撹乱がなくなる条件である。2.3 境界積分方程式
次に離散渦法および境界要素法の一種である特異点分布法の考え 方を導入し て、 前述のような境界条件を満たすような速度ポテンシャルφ(y, z; t)を求める
方法について示す。
まず速度ポテンシャルφ を、一様流れの速度ポテンシャル島、物体による撹 乱ポテンシャルφB および剥離渦層による撹乱ポテンシャル<ÞWの3つの成分 に分けて次のように表す。
φ(払z; t) =φ1+φB+φw
(2.5)
一様流れUによる速度ポテンシャル<Þ1は、流向が y軸に平行である場合、<Þ[ = u・3 (2.6)
となる。剥離渦層による撹乱ポテンシャルφwについては、 従来の離散渦法に 従い、剥離渦層を離散的に配置される自由渦の配列によって表すと、次式のよ うになる。
1どこ
唱Z-ZW1-
φW=
一士乙πk:i) � fWk tan-1 Y - YWk
日向(2.7)
ここで、NFは 自由渦の総数、fWkは(YWk,ZWk)に位置する自由渦の循環(ただ し時計回りを正とする。)を表わす ものとする。
物体による撹乱ポテンシャルφBについては、従来の離散渦法では物体表面条 件の取り扱いやすさから、物体まわりの流れを円柱まわりの流れに写像し、写 像平面の中で 自由渦を流出させる場合が多い 。しかし写像を用いる方法では、
物体形状によっては制限条件から十分に表現できない 場合がある。従って本研 究では、種々の横断面形状をより正確に考慮して流体力の計算を行うために、
物体表面上にLaplace方程式(2.1)式の 特解を分布させて横断面まわりのポテン シャル流れを表すことを考える。物体表面上に分布させる特解として、 稲室40) に倣い連続束縛渦を用いるものとすると、物体による撹乱ポテンシャルφBは 次式のように表される。
<ÞB = 一 礼B7川)tan- J 1 fj dt (2.8)
ただしγ(η?ぐ;t)は物体表面上の点(り,()の時間tにおける束縛渦の強さ、dfは 物体表面に沿う微小線素を示す 。なお(2.6) rv (2.8)式は何れ も、(2.4 )式に示し た無限遠の条件を 自動的に満足することになる。
次に (2.5) rv (2.8)式のように表した速度ポテンシャルを、(2.2)式の物体表面 条件の式に代入すると、次式のようなγに関する境界積分方程式が得られる。
θφ(Y1'Zl;t) δn
= V1ny +ω1nz
=(竺) ny +
I θY1ν〔δ 1 r (幻 l
一一一Zl) J nz Z,-(
= I | U+ 云
乙7rJSB j γ(η,(; t) { �; I {�_ /" \? df
1 � � ....,
_Z, -ZWk Z1-Zwk I I
+ zk11 wk(U1- M )2+(Z1-zwk)2 l n u
+ 卜;}-
rγ(
TJ,(;t)れーワ
-:::dfI L.7r JSB
1 �
て�T'I
_'111 Y1 -1JWk- -YWk I I ー ハ
2πklwk(U1-uwk)2+(Z1-zwk)2 l nz=
u
(2.9)
ここに町、ω1はそれぞれ、物体表面上の任意の点(y!, zI)に誘起される速度のy 軸方向成分、z軸方向成分を表し、nyおよびnzはそれぞれ、物体表面の外向き 単位法線ベクトル nのu軸成分およびz軸成分 とする。 2.6節で述べるように、
(2.9)式中の自由渦の位置(YWゎZWk) と循環fWkを剥離渦層の運動学的条件 と力 学的条件から 時々刻々既知なるものとして与えると、上記の境界積分方程式を
物体表面上の束縛渦 強さγ(り,(;t)について解けば流れが求まることになる。
2.4 流体力の算定
境界積分方程式(2.9)式を解いてγ(η?ふりが求まると、断面に作用する流体力 を計算することが出来る。
ここでは次式に示す非定常流に拡張されたBlasiusの公式によって断面に作用 する流体力を求める。
町一四
(2.10)
ここでfは複素速度ポテンシャル(=φ+ i'町、z'は複素数(=y + i' z)、i'は虚 数単位、ーは共役複素数、ムYおよびムZはそれぞれ、断面に働く流体力のy軸 方向成分およびz軸方向成分、 Cは物体を取り囲む任意の閉曲線を示す。
2.5 境界積分方程式の数値解法
物体表面上に連続分布した束縛渦を離散化することにより、2.2節で導いた γ(ワ,(; t)に関する境界積分方程式(2.9)式の数値解を求めることができる。 本節
では その数値解法の概要について述べる。
Fig.2.2に示すように、物体表面をM 分割し、 各要素をその両端の座標(Yj,Zj),
(Yj+b Zj+I)を結ぶ線分で置き換える。 ただしj= 1 ,2,・・.,Mである。 次に線分
γ'j+2
γJ
ー+1
Fig.2.2 Distribution of bound vortex
要素の両端で束縛渦の強さγj,1'j+1を定義し、 線分要素上で渦強さが直線的に 変化するように束縛渦を分布させる。 この時、j番目の線分要素上の任意の点 (ワ,
()は、 両端の座標(Yj,Zj),
(Yj+1' Zj+1)と線分要素上の局所座標とを用いてYj+1 - Yj 1
くと、
=1(Yt +yt+1)
一 一(Zi+ Zi+1)Zmi = 2 (2.13)
=
1.2 ・・・ヲM2 ー ヲ
これらM個のcontrol point (Ymi,
Zmi)のそれぞれに おいて(2.9)式が成り立つもの
とすると、次式のような%を未知数とするM元連立代数方程式が得られる。U'nれ
可 九f
+
会主
[[(Zmi_ Zj)ん_ {(Zmi一勺)+ (Zj+1ーZj)}ん+(Z勺j+1一z勺j)戸12j]+{(Zmi _ Zj)11j _ (Zj+1 _ Zj)12j}γj+1].ej . nyi
十土宇 2π K 1 (ym t -uwk)2+(zm zmi _ ZWk -z wf uz
t 九f
一
会 主
[[(Ymi一川j _ {(Ymi _ Yj) + (ル1ーめ)}ん+(め+1叫んれ} (2.14) +{(Ymi _ Yj)11j一(Yj+1一νめωj)Iん2j}γj+1].eんj. n
1と ν恥mt一νYWk
Wl- ' n", ; = 0 2π� (Ymi _ YWk)2 + (Zmi _ ZWk、q … “
γM+1 _γ1 i=1, 2,"',M j=L2γ・',M
ただしいれ, nzi)はt番目の線分要素に立てた外向き法線の方向余弦を表わし、
10jヲ 11jおよび12j は 次式のように定義する。
'Oj = 10吋+;st+Clぬ
1j = 10 1 ω 吋? ふ +C ゐ
(
1 S�12j = ん 吋+;sz + cwst ) (2 15)
Sl =ご/.ejぅO三Sl壬1
α= .e; = (y j + 1 _ Y j ) 2 + (Z j + 1 _ Z j ) 2
b = 2{(Ymi _ Yj)(Yj+1 _ Yj) + (Zmi _ Zj)(Zj+1 _ Zj)}
C = (Ymi _ Yj)2 + (Zmi _ Zj)2
ただし、Z = Jの場合には解析的に特異性の処理を行うこ ととする。
また非定常流に拡張されたBlasiusの公式 (2.10)は、(2.11)、(2.12)式の表現に
一Z
る
一清
な
に
附 J Z う F
よ
J
の
~ハ
式
苧μ出
品川MZ同
ふ
1一
討す 一 行 J内 実
~川
崎MZ同 Lノ U
一A J
・り p
さ=. z
レ 3 化 一 散 Y 離 ム
てつ
よM〓 ・ _ .どこθfwJ.. - I
ぢ すから れ' 伝 説ニ川1
7mj= j M勺+1)
(2.16)
z;=Uj+tfzj,zjvk=ywk+tfzwk jrj;=yj-Uzj?ifWK=UWK+tfzwk
i'2 = -1
結局、(2.14)式に示したM個の連立代数方程式を解くことによって線分要素 の両端における束縛渦強さγj(j
=
1,2,・..,M)が定まると、(2.16)式によって断 面に作用する流体力が計算できる。2.6 渦モデル
次に境界積分方程 式(2.9)式あるいは(2.15)式、 および(2.16)式に含まれる自 由渦の位置 (YWk,ZWk)および循環fWk(k
=
1,2,・・',NF)の表現法について述べ る。離散渦法は、 物体の剥離点から流出する剥離渦層を渦点の集合によって近似 する手法である。 剥離点において導入される渦の位置と循環が定まれば、 これ をある時間間隔で移動させると剥離渦層は多数の渦点の運動によって表現され ることになるため、 渦点の配列を時間的に追跡して物体表面条件を考慮するこ とにより物体まわりの非定常剥離流れを求めることができる。 このように非粘 性非回転流れの取り扱いによって剥離現象や剥離渦をモデル化する場合、 粘性 が流れに対して大きく寄与する要素に関しては何等かの形で計算の中に取り込
む必要があるが、 剥離現象に対する流体力学的条件は未だ確立されていない。
従って剥離点、 剥離点近傍において導入される渦の循環と位置、 循環の減衰や 拡散等については、 経験や実験結果を参考にして種々の仮定や条件が用いられ ているのが現状である35)43)。本研究ではこれらの研究例を踏まえ、 以下のよう な渦モデルを考える。
2.6.1
渦の発生まず物体表面の剥離点近傍における渦の発生過程について考える。 Maskellの 理論的な考察44)によれば、(2.3)式に示した剥離渦層の力学的条件すなわち剥離 渦層の上下両面で圧力が等しいという条件p+ = Pーは、 Bernoulliの式
v ]
司θφ
ζ = 一 二 (マザ ー -
p 2 θt (2.17)
を用いると、
品Y+
φ 。一旬 、、、EE--ノ
作一内側ν
+ W一内
/Itt11\
1i一つ“+φ + 争 。一白
+ [u + � (誓+筈)] :z(φ+ーφ 一) = 。
となる。(2.18)式によると、剥離渦層のポテンシャル飛躍ムèþ=φ+ーφーは、流 体の流れに沿って一定不変ということになる。ここでマは次式で定義される演
算子を表し、
θ. δ マ=一一j+ i-k
θ ν θ z
j、kはそれぞれ、ν軸、z軸上の単位ベクトルである。
さらに(2.18)式は物体横断面と剥離渦層との交点である剥離点においても成 立しなければならず、 また剥離点における渦強さγspと平均流速Vspおよび循 環fWkはそれぞれ、
ISP - マφ+-\7φ-
I
Vsp = (マφ++マφ一)/2
�
fWk = φ+ーφ一
|
(2.19)
であるから、(2.18)式は
Vsp・ISP=-θfWk/θt (2.20)
となる。(2.20)式によればfWkの時間的変化に応じて強さγSpの強さを有する 渦がVSPの速さで剥離点から流出することになり、断面上の剥離点は流速がゼ ロとなる淀み点ではないことが分る。ここで非定常流れの場合、(2.20)式の右 辺は一般にゼロではないから、(2.19)式のように定義されるVsドγSpが共にゼ ロであってはならない条件より、
l \7èþ+ 1 = I叫, 1 \7φ- 1 = 0 (2.21)
が得られる。 すなわち剥離点近傍における断面上の片側で流速が|γSpI、反対従って自由渦を導入する時間間隔をムTとすれば、 導入される自由渦の循環は
fWk
= (lj2),;pムT(2.24)
となる0・
以上発生する渦の循環について述べたが、 連続的な渦層を離散的な渦点で置 き換える場合、 物体表面近傍において渦点の発生位置を定める必要がある。 こ の渦の位置を定める方法についてはこれまで幾っか提案されている。 最も簡 単なものは剥離点近傍の固定点に仮定する方法で、Kuwahara46)、Clements47)、
Kiya, Arie48)は剥離点における境界層外縁に対応させた。Stansby52)は剥離点に おける物体の接線に沿ってその下流Ubムt[Ub
:剥離点における境界層外縁の速度
、ムt :渦を移動させる時間間隔]に与えた。
その他の方法としてSarpkaya50)、Kiya51)は鋭�,かどを持つ物体の場合、 渦が
爪11111 Z
。 。
。
。 0 0 。 ♂
。 。 門
一立
U \
Y一一一一一一ー_y_
iγsp
S �----0 0 0
0 0 0
。 。
。
。 。
Fig.2.3 Nomenclature used to calculate the latest vorticity
shed from a separation poínt
かどの直前における物体の接線上にあるものとしてその位置をKuttaの条件か ら定めた。またSarpkayaら52)は円柱に対して、 剥離点を通る法線上に仮定し、
淀みの条件すなわち発生した渦によって剥離点に誘起される速度が丁度表面速 度を打ち消すような位置に渦を与えた。
本研究では、 剥離点近傍の固定点、に渦の発生位置を仮定する簡便な方法を採 用することとし、 次式のような渦の発生位置を表す係数どを定義する。
S
一一 Sつd(2.25)
ここでsは、Fig.2. 3 に示すように、 あるz断面における剥離点(YsP'zsp)から渦 の発生位置までのz軸方向の距離を表し、dは断面の半高さである。この係数s' を用いて渦の発生位置(YWいZWl)を次式のように仮定する26)。
IYWll = YsP 1
} (2.26)
IZWll = Izspl + S'. d J
なお係数s'は、 強いて物理的な意味を考えると境界層厚さを表すことになる が、計算モデルにおける一つのパラメータとして考え25)26)、 その値の決定につ いては2.7節で述べる。
2.6.2
渦の移動前述のように剥離点近傍で発生する渦の循環と位置が定まると、(2.3)式に示 した剥離渦層の運動学的条件に基づき、 これらの渦点をある時間間隔ムt にて
2.6.3
渦の拡散および減衰剥離渦層を自由渦の配列で表す場合、自由渦相互が近接する場合や物体表面 に接近する場合に非常に大きな誘導速度が生じることとなり、時々刻々の自由 渦の位置や断面に作用する流体力の計算精度に大きな影響を及ぼすことが考 えられる。そこで流体 の粘性による渦の拡散の効果を考慮して、次式のような
Chorin36) の渦構造を与える。
1 -:::- 一 -fWk l乙7fT*k υOk = �川h
l
士一一τ�Wk
� L,7fσL
九k三σk 九kくσk
ここにVOkはk番目の自由渦によって誘起される周速度、7、'.. 渇吋.
径、σkは渦核半径 を表し、 引を次式のように与える40)。
σk = 2.24 M
(2.28)
(2.29)
ただしνは動粘性係数、えはk番目の自由渦が発生してからの経過時間を表す ものとする。
また現実の粘性流体と理想化した非粘性流体と の相異の一つに渦度 の減衰が ある。離散渦法においてその効果を考慮する方法として
(1)自由渦の循環を発生後の経過時間の関数として減少させる52)。
(2)自由渦発生 の直後において循環の相殺量を考慮する49)53)。
等がある。(1)の方法 は、どのような減衰の 法則が適切であるか予め定めるこ とが困難であり、 また非粘性流体 の仮定の下で は循環の保存則と矛盾すること になる35)。一方(2)は、発生する循環を表す (2.24)式に対して、流出直後の循環
の相殺を表す係数 αを乗じて
fWk=α・(1/2)イpAT (2.30)
とする方法である。ここにαは1より小さい係数であり、Katz53)、Stansby49) は それぞれ、0.6、0. 8などの値を用いている。 なお剥離点近傍における渦度相殺 のメカニズムは、剥離点下流の逆流によって物体背面に形成される境界層の渦
度(剥離点上流の境界層の渦度とは逆符号)が、菊j離点近傍に持込まれることが 考えられる35)。 しかし何れの方法にしろ現実の流れに関する渦度の減衰につい ては不明な点が多く、 その適否は最終的な計算結果と実験結果の対比によって 決定されているようであるが、本研究ではより簡潔な(2)の方法すなわち(2.30) 式を用いて循環の減衰を考慮する。
さらにKelvinの循環保存則
A � B . γ( η , (; t)df + k=l L NF fWk = 0 (2.31)
については、 水面を鏡像面とした二重模型の場合、物体表面上の束縛渦の強さ と位置ならびに後流中の自由渦の循環と位置は共に、 常にy軸に関して対称と なるため、(2.31)式は自動的に満足されることになる。
2.7 渦モデルに含まれる諸係数の決定
2.6節の渦モデルを用いる場合、発生する自由渦の位置と循環を与える(2.26) 式および(2.30)式中に含まれる諸係数、すなわち剥離点の位置(YsP'Zsp)、渦の 発生位置を表す8'および発生直後の循環の相殺量を表す係数αの値を具体的
に定める必要がある。
しかしこれらの決定法に関する流体力学的条件は必ず しも明確ではなく、研 究者や対象とする物体形状によって異なっている40)。従って船首部から船尾部ま で多様に変化する船体の横断面形状、あるいは種々の船型の横断面に対応する cross flow dragを推定するに当たり、工学的見地からは統一的かつより簡便な決
定法が望まれるところである。
そこで本節では、滑らかな物体の基本形状である円柱に本計算を適用して、
剥離点、の位置(YsP' zsP)と円柱に作用するcross flow dragとの関連について調べ る。次に、 弱j離点の明確な正角柱および平板を対象に渦の発生位置を表す8'お よび循環の相殺量αについて考察を加える。最後にかどに丸みを有する正角柱 に働く cross flow dragを計算し、剥離点、渦の発生位置および循環の相殺量の 仮定法も含めて本計算法の妥当性について検討する。
2.7.1
剥荷量点、の位置円柱のように表面曲率が滑らかに変化する断面形状の場合、断面内の剥離 点は明確に定まらず、 何らかの方法で剥離点を決定あるいは仮定する必要があ る。
その方法の一つに境界層方程式を解く ことにより 剥離点を求める方法があ る。 例えばDeffenbaughら54)、Sarpkaya ら52)は、層流境界層方程式に対する Pohlhausenの近似解法55)によって円柱表面の境界層特性を求め剥離点を求めて いる。 しかしPo lhausenの方法は逆圧力勾配の場合の精度に問題があり、特に 剥離点での誤差が大きい。 また稲室らも、層流境界層に対してはPohlhausenの 方法を用いており、一方、乱流境界層についてはHeadの方法で解いているが、
円柱以外の任意形状を有する断面の剥離位置を定義する際、形状係数をどのよ
うな値に指定するかが問題として残る。
またこれとは別にStansby49)は、物体表面に沿う流速Usを用いた次式によっ て、 剥離点の位置を定義している。
入三(USmax-Us)/Usmax
(2.32)
ここでUSmaxは表面流速の最大値を表し、 円柱の場合、入== 0.04となる下流の 位置を剥離点として計算を行っている。
いま船体のような種々の横断面に対して本渦モデルを適用する場合、Stansby のような方法が境界層方程式を解くことに比べてより簡便且つ実用的であると 思われる。 また入を一つのパラメータとして考えると、 この値を剥離位置ある いは断面に働く流体力に関する実験結果との対応を考慮して適切に選定できれ ば、 ある程度の計算精度が期待できるものと考えられる。 そこでStansbyの方 法に従い、 断面の表面流速に着目して剥離点を仮定し計算を行うこととする。
しかし( 2.32)式の入の値を決定するためには種々の断面形状に対する流場観 測結果が必要になると思われる。 本研究では表面の曲率が滑らかに変化する断 面形状の中でも比較的研究例の多い円柱の場合を例にとり、 表面流速分布、 弱j 離点および断面に働くcross flow dragとの相闘を数値的に調べることによって 剥離点位置の決定法について検討する。
Fig.2.4は計算の対象とした円柱の断面を示す。 ただし同図における・印は、
円柱断面を 3次のスプライン関数で近似したのち、微小な有限個の線分要素で 近似した場合の各線分要素の端点位置を示している。 なお断面はy軸に関して 上下対称であるため、断面の下半部のみを示している。 これらの各線分間で強 さが線形に変化するように束縛渦を分布させ、各線分要素の中点で物体表面条 件を満足させる。
円柱の場合、レイノルズ数が亜臨界領域(Re三4
X
105)では、 前方よどみ点 から剥離点位置までの角度()s は75 0 f'O..J 80 0付近で層流剥離し、レイノルズ数 が超臨界領域(Re>
4x
105)ではいったん層流剥離した後再付着して乱流境界 層に遷移し()s = 1200付近で乱流剥離を生じ、さらにレイノルズ数が極超臨界 領域(Re>
2x
106)に達すると層流境界層が最低圧力点直後で乱流境界層に遷移して()s = 105 0 f'O..J 1100付近で乱流剥離を起こすことが知られている56)。 そこ で剥離点の位置を()s = 750、1050 および120 0と仮定して円柱まわり の流れを 計算し、剥離点の位置と円柱に作用するcrossflow dragとの関連について調べ た。 また比較のために、剥離点を剥離のないポテンシャル流れにおいて表面流 速Usが最大となる位置、すなわち(2.32)式において入=0.0となる孔=900の 場合の計算も行った。
Fig.2.5は、半径d=5 mの円柱に、流速U = 1.0m/secの定常な一様流が作用
し始め、無次元時間 (Ut/d) = 6.04経過した後の自由渦の計算結果である。 ここ に・印は、 負の循環(反時 計四り)を持つ自由渦を表し、循環の相殺量を表す係 数αは、 Katzの円柱に対する検討結果53)に従い、α=0.6とした。 さらに渦の 発生位置を表す係数ピ=0として、発生した渦は剥離点から鉛直方向(z 軸方 向 )に、剥離点における流速v sp = (1/2)γspで流出するものとして計算を行った 例である。 なお渦の発生および移動の時間間隔ムTおよびムtは共に 1.0 secとし fこ。Fig.2.5を見ると、剥離位置の違いによって自由渦の分布が異なり、。s が大き くなるに従って、z軸方向に対する渦位置の集中度がより高くなる傾向を示して いる。
Fig.2.6は、円柱断面に作用するcrossflow drag係数CDの時間的変化を示し
一今
a' A' A' A,a' -j? 畠V畠V ‘, 血' U
A' a' - A' - A' A' A' a' . 4 A, ・ 2 - nU バ斗
RJvno
ヲ, = =Id e
s 凶
ーー+ A'av・ A'
A' A' . A' a' a' A'
畠va' A' A' av • A『 nU
2
・
nuRu
nョ = =AU
久 山
A'
畠V畠V a'A' A'A'
a' A,・晶v'
・4司 A'A'
a' 畠v a' a' a' a' A, ‘ , . 4 . 4' •
e s = 1050
Ut/d = 6.04
仁コ口
2.0 1.0
0.01 -1.0
。 。
1.0
0.01 -1.0
。 。
1.0
0.0 -1.0
2.0
。 。
1.0
0.0 -1.0
8 s = 750
Ut/d
8 s = 900
Ut/d
8 s = 1050
Ut/d
8 s = 1200
Ut/d
Fig.2.6 Time histories of cross flow drag acting on a circular cylinder
たものである。 ただしCDは次のような定義に従うものとする。
C D=,
唱 ム Y計 (2d )U2
さらにFig.2.7の・印は、計算で得られたCDの時間平均値(Ut/d=5.04 1'-1 6.04 までの平均値)を、横軸に83をとって示したものである。 また同図のO印は、 レ イノルズ数が種々異なる場合のW
i esels b
er gerによる実験値56)を表し、横軸の83 は、 それぞれの実験状態、において観測された剥離位置の時間平均値とする。2.0,
にコ
。
1.0 t-
O.Cèo
。: Exp.
• : Cal.
。
• •
8
90 e 5 (deg.)
Fig.2.7 Cross fiow drag acting on a circular
。
•
120
と期待できる。
2.7.2
渦の発生位置および循環の相殺量一方平板や正角柱のように鋭いかどを持つ断面形状の場合、 円柱等のように 滑らかな形状断面の場合に比べて剥離点はより明確であると考えられる。 そこ で剥離点の位置がより明確な平板および正角柱に本渦モデルを適用し、渦の発
生位置を表す係数s'および循環の相殺量を表す係数αについて検討する。
Fig.2.8は計算の対象とした平板および正角柱の上半部断面を示す。 ただし
・印は、断面形状を微小な有限個の線分要素で近似して表した場合の各線分要 素の端点位置である。 ここで平板については、 その高さ(2d)に対して1/100の
FA ε)N
。 民.d
o 5 Y (m)
rec↑angular cylinder
FAε)N
. . ...
•
•
•
•
•
•
•
•
•
•
•
•
... . .
• -
•
•
•
•
•
•
•
•
•
。 。 5 Y • (m)
Fig.2.8 Body elements used in numerical calculation
for a fìat plate and rectangular cylinder
幅(B)を持たせた。 また平板、 正角柱の断面高さ2dは何れも10 m、 作用する 一様流速Uは1.0 m/secとし、 一様流れは定常かつy軸に平行とする。