九州大学学術情報リポジトリ
Kyushu University Institutional Repository
大きな斜航角を伴う船の操縦流体力に関する研究
田中, 進
https://doi.org/10.11501/3120515
出版情報:Kyushu University, 1996, 博士(工学), 論文博士 バージョン:
権利関係:
第5章 大きな斜航角を伴う船の操縦特性 5.1
緒言第l章で述べたように、船の操縦特性を推定する場合、操縦運動の数学モデ ルを用いた数値シミュレーションは最も有力な手段の一つである。 この操縦運 動の数学モデルには応答モデルおよび流体力モデルと呼ばれる2種類のものが ある63)。
前者の応答モデルは、制御工学的な立場から船の運動を取り扱うものであり、
操縦運動を操舵という入力に対する船の応答出力として考え、野本ら64)65)は、
操舵による方位角の変化をある簡単な微分方程式で表現し、いわゆる操縦運動 の応答方程式を得た。 さらにこの応答方程式において、操縦性指数と呼ばれる 旋回力の意味を持つKと時定数の意味を持つTを用いて船の旋回性と応答の 追従性を表し、操縦性の研究分野における応答モデルの地位を定着させた。
応答モデルの特徴は、求めるべき操縦性指数の数が少ないことと、実船でも 模型船でも同じ実験ができること、さらに適当な形の非線形項の導入や船体の 前後方向に関する類似の式との連立により、加減速運動等にその適用範囲を広
げ得ることである。 しかしその反面、操縦性指数と船型との結びつきが不明確 であり、また外乱は舵角への換算か初期値の調整等の方法に頼らざるを得ない。
一方、後者の流体力モデルは、船の運動方程式を流体力学的な立場から取り 扱い、船体に作用する流体力を速度、角速度、舵角とそれぞれの時間微分の関 数として見なし、その関数の構成と推定法を流体力学的に調べ、その成果を運 動方程式に入れて任意の操縦運動を求めるものである。
この流体力モデルに関しては、特に日本造船学会試験水槽委員会第2部会(現 在の日本造船学会運動性能研究委員会 )に組織された「操縦運動の数学モデル 検討グループ(略称MMG)Jにおいて検討された通称MMGモデル66)",70)は、
流体力の表現を主船体・ プロペラ・舵それぞれに作用する流体力と、それぞれ の相互干渉力によって明示しているため、外乱等による影響を簡単に取り 入れ られるだけでなく、流体力の各成分に関する最新の研究成果を簡単に利用でき るという利点があることから、世界的にも操縦性能を推定するための合理的な
数学モデルとして定着しつつある。 現在、流体力モデル、特に前述のMMGモ デルを用いた数値シミュレーションを行う方法は操縦性能の推定に関する研究 の主流となっている。
しかしこのMMGモデルは、船の前進運動が支配的で横流れ運動や回頭運動 は相対的に小さく、船体に作用する流体力は慣性力と揚力が主体である局面を 対象として組み立てられたものである。 従って 港湾域等において、タグボート やサイドスラスタ等の制御手段の使用の下に船が縦横自在に運動する場合を取 り扱う場合、従来の数学モデルにおける前提条件が成立しなく なるケースが多
し、。
このような課題を検討するために、日本造船学会運動性能研究委員会に組織 された「低迷・浅水域操縦数学モデル検討専門委員会(略称MSS ) Jにおいて、港 湾域等における船の操縦運動の数学モデルについて検討がなされた。 MSS の報 告71)",74)によると、水深が制限されたいわゆる浅水域中を、船がさほど大きな 横流れ運動を伴うことなく 航行する時の操縦運動数学モデルについては、ほぼ 実用の域に達しつつある。 しかし船が低速航行中、前進運動に比べて大きな横 流れや回頭運動を伴い、大きな斜航角を有する場合の数学モデルについては、
流体力現象や操船局面の複雑さのため、十分に合意の得られた標準モデルが確 立されるまでには至っていない。 ところが 港湾域等における操縦性能の検討に 対する昨今の要請から、 目的に応じた幾つかの低速時の数学モデルが提案され ており、それぞれの数学モデルが対象とした特定の船型については、操縦運動 の計算結果は実測結果と良く 一致しているようである。 ただしこれらの運動計 算に必要な流体力データは、何れの場合も、対象とする模型船を用いた詳細な 拘束模型試験によって得られている。
しかし一般には各々の計画船に対してその都度模型試験を実施することは不 可能に近い。 通常操船時すなわち船の前進速度が支配的な状態における流体力 データについては、船の基本的な操縦性能を求める必要性から計測例も比較的 多く、これらの流体力データは、揚力面理論によって導かれる船体アスペクト 比をベースに、数式化あるいはデータベース化され、今日、各所において初期
設計時の操縦性能予測に供されている。
これに対して低速操船時の流体力データは、通常操船時のデータほど蓄積さ れておらず、また、計測すべき運動状態、もより 広範な横流れや回頭運動に対応 しなければならないことから、費用ならびに労力の点から多大の困難を伴うも のと思われる。 この意味においても、大斜航角時における船体流体力を理論的 に推定することは有用であり、本流体力計算法の妥当性は第2章~第4章で述 べた。 しかし流体力結果の評価はそれを用いた数値シミュレーションによって操 縦特性を求め、最終的な出力結果である運動の場で行うのがより 実際的である ように思われる。
そこで本章では、前章までに示した広範な斜航状態の下での流体力に関する 理論的な考察を踏まえ、まず、船が大きな斜航角を伴う時の操縦運動数学モデ ルについて考える。次に数学モデルに含まれる諸係数を理論的に推定する方法 について、 拘束模型試験によって得られた流体力との比較しながら検討する。
さらに本数学モデルを用いて大斜航角時の船の操縦運動をシミュレーション計 算を行い、自走模型試験結果との比較によって数学モデルの妥当性を検証する。
最後に、造船設計あるいは操船設計への応用の可能性を考察するために、本理 論計算法を船型の異なる2隻の船に適用することにより、船型が大斜航角時の 操縦特性に及ぼす影響について調査する。
第2節では、cross flow dragの概念を基に、回頭運動の影響も考慮し、大斜航 角時の船体運動に対応する操縦運動数学モデルを導く。
第3節では、本数学モデルの妥当性を検証するために実施した拘束模型試験 法、ならびに自由航走模型試験法の概略について述べる。
第4節では、数学モデルの検証用データとしてまず、拘束模型試験結果によっ て得られた流体力の解析法について述べる。次に本数学モデルに含まれる諸係 数に関し理論計算によって求める方法について、上記拘束模型試験の解析結果 と比較しながら検討する。
第5節では、前節の方法で具体的に記述した数学モデルを用いて、船が大斜 航角を有する操縦運動を実際にシミュレーション計算によって求め、自走模型試 験結果との比較を通して数学モデルの妥当性を調べる。
第6節では、検証した本数学モデルを用いて2 隻の異なる船型を対象にシ
ミュレーション計算を行い、船型の違いと大斜航角時の操縦特性との関連調査 を試みることによって、本操縦運動計算法の造船設計あるいは操船設計への応
用の可能性について考察する。
第7節は本章で得られた結果をまとめる。
5.2
大きな斜航角を伴う船の操縦運動数学モデル
5.2.1 座標系および運動方程式
平水中における船の操縦運動は、一般に水平面内の2次元運動として前進、
横流れおよび回頭運動の連成運動として取り扱われる20)。 運動を記述する座標 系としては、操縦性能の研究において慣用されている船体の慣性主軸に固定し た動座標系を用いる。 いまFig.5.1に示すように、 空間固定座標を0- Xo,Yo、船 体の重心を原点とする船体固定座標をG - x,yとし、船首方向にz軸、船体右 舷方向にν軸、鉛直下向きに z軸をとる。 また船体に作用するz、y軸方向の
x。
けυ
ア
/,x
-v
r,
N
\�
Y
"冶
1 Y
1
、、
、
6
、 1
1
/
Yo
。
Fig.5.1 Coordinate system used to calculate manoeuvring motion of ship
カをそれぞれ X、Y、さらに z軸まわりのモーメント を Nとすると、平面運動 に関する船の重心GまわりのEulerの運動方程式が次式のように表される。
(m + mx)ü -(m + my)υγ = X I
(m+mν)心+(m + mx)ur = Y
�
(5.1)(Izz + Jzz)十 = N
J
ただし、m,mx および my はそれぞれ、船の質量、zおよびU軸方向の付加質 量、ιz、Jzz はそれぞれ、z軸まわりの慣性モーメント および付加慣性モーメン
ト、 u,vおよび Tはそれぞれ、船速Uの z、y軸方向成分および z軸まわりの回 頭角速度、(・)は時間微分を表す。
さらに運動方程式(5.1)式の右辺を構成する力については、標準的な形式と して用いられているMMGの考え方66)",70)に従う。すなわち主船体、 プロペラ および舵に作用する流体力を基本的な項として、さらに外力の項(タグやサイ ドスラスタ等の操船量、風や潮流等の外乱による力)を加えた形で表現すると、
X = X H+X p+X R+X E
I
Y = YH+ら+YR+む
�
(5.2)N = NH+Np+NR+NE
I
となる。ただし添字H、P、RおよびEはそれぞれ、主船体、 プロペラ、舵に作 用する流体力および外力の項を表す。
5.2.2 数学モデル
(5.2)式に示した船体に作用する流体力を、船の運動状態に応じた値を代入す れば(5.1)式から船の運動特性が求められることになる。従って以下では、運動 状態に応じた船体流体力の表現法、即ち船が大きな斜航角を伴う時の運動を対
象とした数学モデルについて述べる。
まず主船体に作用する流体力について、運動変数u、 υ、Tに関する線形項と 非線形項とに分けて表現すると、次式のようになる73)。
一( )+X N(YH = 凡Ivlulv十九rur + YNL(民v,r))
|
NH = Nuvω+ Nurur + NNL(U,叫r)
(5.3)
ただしR(u)は、摩擦抵抗が主成分となる直進時の船体抵抗、XNL(υヲア)は粘 性に起因する操縦運動による抵抗変化、ÌÍulv lulv、Yur町、NuvuvおよびNururは 揚力成分を表し、YNL(v,r)、NNL(υ,r)はその他の非線形成分を表す。
ここで(5.3)式における非線形成分 YNL(U,叫r)、NNL(U,引けは、Fedyaevskyと Sobolov17) はcross fiow dragの概念を導入し、船体z断面のcross fiow drag係数 GD(X)と船体中心線に垂直な 流速υ+xrを用いて次式のように与える。
1 _ rL/2
_ , " , , I , )
YNL( v, r) = -�pd I _'._ GD(X)(υ+ xr)1υ+ xrl dx
I
f
J;:fyJ ) (54)NNL(υぅr) = 一二pdI 2 r J -L/2 _' . G D ( X ) (υ+ xr)1υ+x巾dx-�, " II
I
J ここにp は流体の密度 、dは船の吃水を表す。
しかし前進速度が十分に大きい場合を対象とした従来の数学モデルにおいて は、横流れ速度υと回頭角速度Tをノミラメータとする多項式によって非線形項 を表す方法が一般に用いられており7)、その場合の流体力微係数についても多 くのデータが 蓄積されている。従って大きな斜航角を伴う船の運動状態に対応、
する数学モデルも、従来の数学モデルで蓄積されたデータベースをそのまま継 承できる形式がよ り望ましいように思われる。このような観点から 、本研究で は運動変数u、れTに関する多項式モデルを用いて (5.3)式の非線形項を表す ことを考える。
ここで採用する多項式モデルの次数については、井上ら75)と同様に 、 (5. 4)式 に示したcross fiow dragの考え から仏Tをノマラメータとする2次式を用いつつ、
モーメントについては、記述精度の点からυとTの3 次式とする。さらにこれ らの非線形項に及ぼす 前進速度uの寄与については、Fourier級数モデルから導
かれ た高品の表現10)に従うものとすると、
YNL(川r) = れIvlυ|υ|十九Irlurlrl +丸Irlvlrl
�
(5.5)NNL(Uぅ叫r) = Nuv川.lV3 + Nrlrl rl rl + (Nvvrv + Nuvrr1.川
な お 、操縦運動による抵抗変化 XNL(υ,r) については、町VL(v,r) および NNL(υヲr)のように特別な 表現はなく、
XNL(υ,r) = X川?+X川Jr + Xrr r2 (5.6)
を基本として、必要に応じて高次の項を付加して表現する方法が一般に用いら れており76)、(5.6)式に従う。
これらの (5.3)
rv
(5.6)式を、船速U= 0の場合を除いて次式による無次元化 した表現を用いて整理すると、(5.8)式のようになる。u、v' = u,vjU r' = rL/U
XH
ヲ
YiI ,ロ
= = XHX�
') YH/�pLdU2 YH/ �pLdU2r
(5.7)1 2
N� = NH/�pL2dU2 2
XH = YH 一 NH =
(Xげ+X;川)×
;
pLdU2(九Ivlu'lv'+ 山
心
円Ivlv'lv'l十九Irlu' r'l r'l 叫|Tidyl)×j
pLdU2(
N;uuV+N;TUhN;Jf♂+ N;lrl r'lr'l + (凡イ
+N;J怖が}
×
;
pL2dU2(5.8) (5.8)式は、前進速度が支配的な場合すなわちu'� 1の時、通常の操縦運動に対 する船体流体力の数学モデルと極めて近い形となる。
また船速U= 0すなわちu=υ=0の場合、(5.3)
rv
(5.6)式はXH= YH = 0で NHがr2に比例する形となり、次式のように表される。XH = 0
I
YH = 0
>
NH =
N川叫川;A九川|い川円T叶υ円|門川×川刈γパ仲|
だたし(伊5.β8的)式におけるXHは、直進時の船体抵抗R '(いu')をX;ωu'と表現し、また 非線形成分として、(5.6)式の中で最も主要な項であるX肘vrのみを採用した。
次にプロペラや舵の操作を行わず、これらの発生する力はタグ等による外力 に比べて著しく小さい局面を考え、プロペラ推力Xpについては、 初期の前進 速力Uo に対応する直進時の船体抵抗R(uo) = (X�u�) x 1/2pLdU5と釣り合う大
きさで一定とすると次式のようになる。
Xp=一山;)×
j
p叫vhu ,,EE、、 AU 1Bi 、、EE,,,
(5.9)
またプロペラによる左右非対称な力ち、Npはプロペラ正転の場合のみを取 り扱うこともあり考慮しない。
さらに舵に作用する流体力については、舵のcross flowによる成分のみを考 慮し、次式のように表す14)15)。
XR = 0
YR = -
�
内(υ+叩)1叶州GDR�
(5.11)lVR = -EPAR(υ+ xRr)1υ+XRパGDRXR
ここにARおよびXRはそれぞれ、舵面積および舵の前後位置を表し、GDRは舵 縦断面のcross flow dragの係数とする。
5.3
模型試験
5.2節に示した大斜航角時の主船体に作用する流体力の数学モデルに関して、
流体力の場のみならず、数学モデルの最終的な出力である運動の場で行うため には、拘束模型試験によって得られる流体力計測データに加えて、自走模型試
験等によって得られる運動計測データが必要となる。
本研究では、上記数学モデルの検証用データとして、高品10)による拘束模型 試験結果 お よび自走模型試験結果を用いることとし、本節 では こ れらの試験方 法の概要を示す。
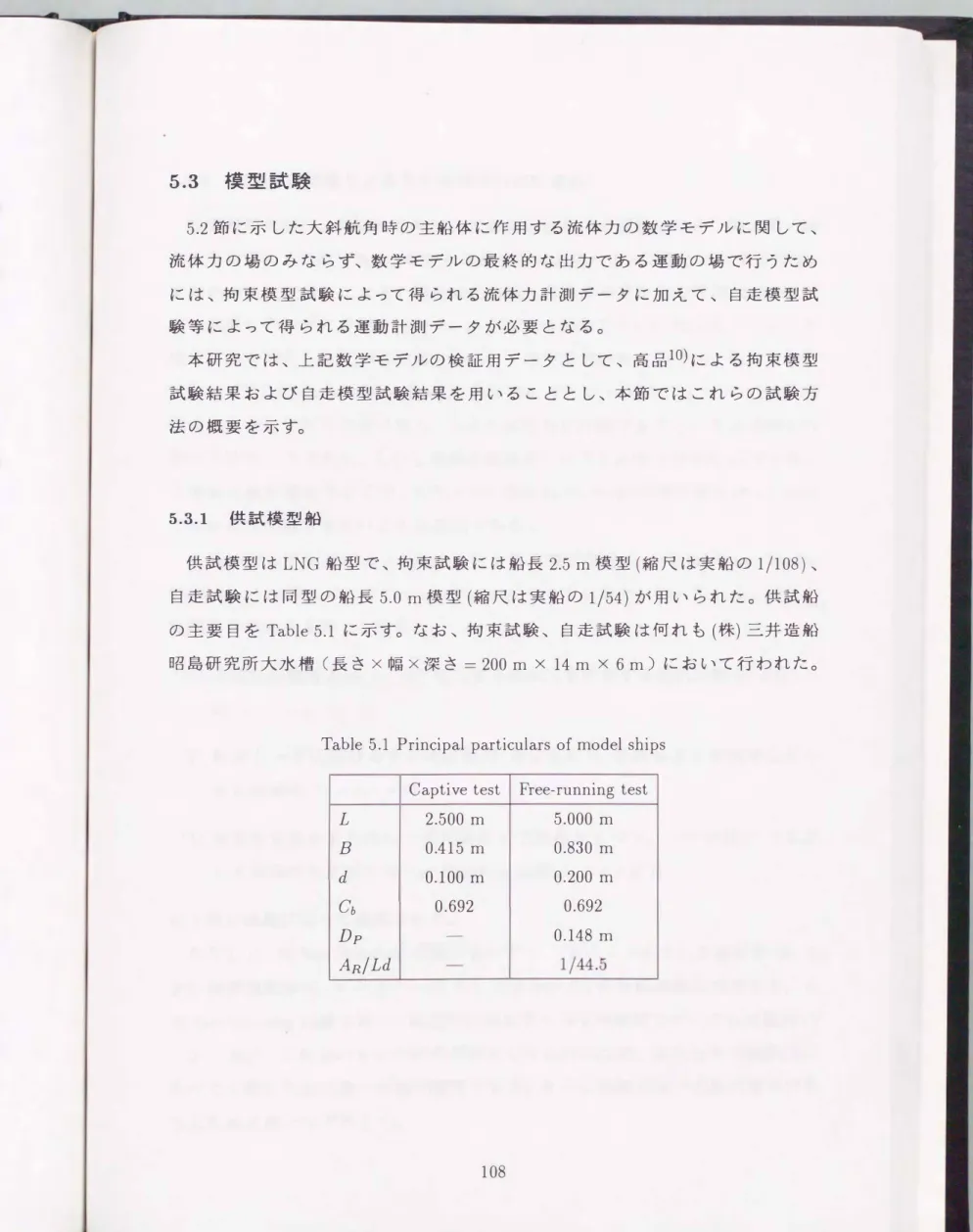
5.3.1 供試模型船
供試模型はLNG船型で、拘束試験には 船長2.5 m模型(縮尺は実船の1/108)、
自走試験には同型の船長5.0 m模型(縮尺は実船の1/54)が用いられた。供試船 の主要目をTable 5.1に示す。な お、拘束試験、自走試験 は何れも(株)三井造船 昭島研究所大水槽〈長さ×幅×深さ= 200 m x 14 m x 6 m)において 行われた。
Table 5.1 Principal particulars of model ships
Captive test Free-running test
L
2.500 m 5.000 mB 0.415 m 0.830 m
d
0.100 m 0.200 mCb 0.692 0.692
Dp 一 0.148 m
AR/Ld
5.3.2 拘束模型試験による主船体流体力の計測法
拘束模型試験は、模型船を拘束して強制的に所用の運動を与え、船に働く流 体力を計測する試験である。横流れ運動や回頭運動が前進運動と同程度の場合、
すなわちß, r'が非常に大きい場合の主船体に作用する流体力の計測法には、特 に一般的な手法がある訳ではなしいくつかの機関でそれぞれ工夫をこらした 拘束試験が試みられている段階である。 その中で芳村の方法14)は、通常行われ ているCMT(C ircular Motion T est)を実質的にグ= 00 '" 3600 , Ir'l = 0.0",2.0の範 囲まで拡張して行う方法であり、定常な流体力が計測できるという点で最も有 効な方法の一つである。 しかし通常操縦運動に対する流体力計測に比べて著し く実験点数が増加すること、またCMT 装置あるいは旋回腕装置を持った施設 でなければ計測できないことに難点がある。
それに対して高品によって実施された拘束模型試験は、PMM(Planer Motion M echanism )試験におけるCombinedmotionモードに似た、Yaw Rotating試験と
呼ばれる試験を主体としており、
(1)広範な斜航角ß=00 '" 1800に対する流体力を計測する斜航試験(UヂOr, = 0)
(2) 船速U = 0におけるその場回頭時( 重心まわり )の流体力を計測するその 場回頭試験(U = 0, rヂ0)
(3) 模型船を重心まわり に一定角速度Tで回頭させつつ、一定速度U で曳航 して流体力を計測するYaw Rotating試験(U -1= 0, rヂ0)
の3種の試験によって構成される。
ただし(3)のYaw Rotating試験においてU→O(r'→∞)とした場合が(2)の その場回頭試験に、γ→O(r'→0)のした場合が(1)の斜航試験に相当する。 ま たYaw Rotating試験では、一航走中に与えれた回頭角速度とすべての斜航角(ß
= 00 '" 3600 )の組合わせに対する流体力が得られるため、従来の拘束試験法に 比べて大幅な実験工数の削減が期待できる。 さらに試験装置が比較的簡単であ
る点も利点の一つであろう。
ここで何れの拘束試験においても、模型船のRoll 、Pitch 、Heaveは拘束され た状態で計測が行われた。
5.3.3 自由航走模型試験による運動計測j法
その場回頭や横移動を含む大斜航角時の操縦運動に関しては、系統的な運動 計測データがほとんどないのが現状である。 高品は、 港湾域等において、船が タグやスラスタの支援を受けて運動する場合の基本特性77)を明らかにすること を主な目的として、船体のその場回頭や横移動、およびこれらの運動に及ぼす 船速影響を含む系統的な自走模型試験を実施した。
しかしタグやスラスタによって船体に与えられる力は、船体との流体力学的 な干渉等によって必ずしもそれらの発生する推力とは一致しないことが考えら れる。 従って主船体流体力の数学モデルの検証という意味では、それらの不確
定要素が加わる分だけ有用性が損われることになる。
そこで高品は、タグやスラスタによって模型船に外力を加えるかわりに、船 体との干渉および船体運動による推力変動の非常に小さい空中ファンを用いて、
模型船に横力および回頭モーメントを与えた。Fig.5.2に、模型船に搭載された 横力発生用の空中ファンの配置を示す。
AFT FAN
レー
2.000 2.0005.000
UNIT: mm
Fig.5.2 Arrangement of air-fan system
FORE FAN
Fig.5.2に示すように、横力および 回頭モーメント発生用の空中ファンは、船 首(8.8.9)、船尾(8.8.1)にそれぞれ1台ずつ横向きに搭載されている。各空中 ファンは、両回転方向に使用できるダクト付ファンで、定格出力は各々約1.0 kg である。本空中ファンはマイクロコンビュータおよび制御アンプによって、あら かじめ陸上検定で求めたスラスト~回転数特性を基に回転数が制御されてお り、船の操縦運動状態に応じて本船が受けるであろう外力を時々刻々発生させ ることが出来る。陸上検定の結果、空中ファンの指令値に対する出力値の誤差 は最大でも4%程度である。 また空中ファンの発生するスラストは、船の運動 によりほとんど変化しないことが確認されている。
船位の計測は超音波式船位測位装置を用い、回頭角ゅは方位ジャイロによる。
計測されたデータはテレメータにより陸上に送られ記録される。
5.4
船体流体力微係数の決定
5.2節で述べた数学モデルの中の諸係数の値が具体的に分れば、(5.1)r-v(5.11) 式を用いて所用の時々刻々の船の操縦運動を計算で求めることができる。従って これらの諸係数をどのように求めればよいかが問題となる。諸係数を求める方 法としては、拘束模型試験、諸係数に関するデータベースあるいは理論計算に よる方法がある。
拘束模型試験による方法は、諸係数を求める上では最も直接的な手法である。
しかし費用や時間等の実用的な観点、あるいは設計段階における観点からはあま り得策とは言えない。 従って特に設計の段階で港内操船等における操縦性能を 評価する場合を考えると、諸係数に対して船型要素を反映したデータベース、
あるいは数式化された近似推定式があれば非常に便利であると思われる。とこ ろが大斜航角時の船の流体力データについては、通常操船時の場合と異なり計 測例はさほど多くは蓄積されておらず、理論的な研究例もほとんどないのが現 状であるため、データベース化あるいは近似推定式作成には今後のデータ収集 が強く望まれるところである。従って模型試験に依らず、理論計算によって個々 の船に対する諸係数の値を求める方法が極めて有効な手段となるように思われ
る。
以上のようなことから本節では、 まず流体力の検証用データを得るための拘 束模型試験結果の解析法について述べた後、 前章までに示した流体力の数値計 算法を基にして、理論的に数学モデルにおける諸係数を求める方法について述 べる。
5.4.1
拘束模型試験結果の解析法解析に用いる船の運動および流体力の座標系はFig.5.1 と同様であり、 無次元 化も船速U = 0の場合を除いて(5.7)式に従う。
(1)
斜航試験斜航試験は曳航速度U = 0.327 m/sec
(Fn
= 0.066)で行われた。Fが 00 から 3 600に対する斜航流体力を表現するにはいくつかの方法が考えられるが、 ここ では次式のFourier級数によって表現する。Y�,N� =
�
Sksinkß (5.12)(2)
その場回頭試験その場回頭試験は、U = 0, r = 2ぅ3 , 4, 5 deg/secの状態で実施された。 本試験 の解析法は、 計測した回頭モーメントNÍlを、横軸に回頭角速度の2乗rlrlをと り、Nþの rlrlに対する勾配Nrlrlを求めるものである。 なお、 その場回頭時に 船体に働くXHおよびYHは、 船の前後非対称性によって生ずるが、 本試験で計 測されたXHおよびYHは無視できる程度であった。
(3) Yaw Rotating試験
Yaw Rotating試験は、曳航速度U= 0.109、0.218、0.327 mjsecと回頭角速度 r = 2、3、4、5 degjsecの組合わせ計 12状態、で 行われた。
模型船に、検力計を介して強制運動を与える場合の運動方程式を次のように 表す。
(m + mx)ü = (m + my)υγ+XH -Xm
I
(m + my)心 = 一(m + mx)ur + YH -Ym
�
(5.13)(Izz + Jzz)手 = NH-Nm
J
ここに Xm、YmおよびNmは検力計で検出される力を表す。 Yaw Rotating試験時 には 次式の運動が模型船に 与えられる。
9 rt
u U cosß
v -U sin ß γ constαnt
ü = -Ursinß
v = -Ur cos ß
r = 0
(5.14)
ただしt = 0 で ß=Oとする。 よって、(5.14)式を(5.13)式に代入し、(5.7)式で 無次元化すれば次式が得られる。
Xム= (m� -m
�
)r'. sinß + X�I
勾 = (m
�
ーベ)r'・cosß十九j
Nム= N�
J
(5.15)
計測されるXm" YmおよびNmはß= 00 I'V 3600をl周期とする周期関数となる ので、ここでは斜航試験と同様にFに関する調和解析を行い、 次式のFourier級 数で 表す。
Xム=
乞
{SXk. sin(kß) + CXk . cos(kß)}I
Yム=
乞
{SYk . sin(kß) + CYk . cos(附)}�
Nム=
乞
{SNk' sin(kß) + CNk . cos(kß)}J
(5.16)
(5.16)式において高品は、YÍl、N�に関するsln項として斜航試験の近似に用 い た次数の項をとり、中でもr'に対する変化の大きいSyぃSN2のみをr'の関 数として取り扱った。 またcos項は、比較的値の大きい CY1、CNO、CN2を採用し
fこ。
さらに高品は、〆→∞の 場合の流体力の近似がその場回頭における流体力の
表現となるように配慮し、かつ船体の左右対称性を考慮して Fourier係数の回頭 運動による変化を〆の1次式あるい は 2次式で 表した。 例えば、4次のFourier 係数ま で採用して整理し、N� を 例にとって具体的に示す と次式のようになる。
N� = 810 sin ß
+
(820+
8211〆1) sin(2ß)+
S羽山(3ß)l
�
(5.17)+840 sin(4ß)
+
C01r'+
C02r'Ir'I+
C21r' cos(2ß)J
さら に上記のFourier級数による表現は、9と141?げの関係
sin ß = ーが ヲ 山(2ß) = -2uγ ヲ ・.
l
cos ß = u' , cos(2ß) = 1 - 2v12 , ...
J
等を用いれば、従来の流体力微係数による表現に置き換えることが でき、(5.17) 式は次式のようになる。
N� = N�vυ
' +N 、V 1 ;ι , U JJtd山4jf td J/f + N;ム vvvυdf3 + lNV;ιvパVtωvv1パ川tUJlバt
� .
�
(5.1凶川8的)+N;〉Tf+N;九|いrlr〆パ'1いT〆パr1|+N;ιvl行rl円u匂γ引'1いT〆パfq|+lNV;ιU肘vr v''l.r' J
ここに各微係数と(5.17) 式の810,820,・・・の関係は次のとおりで ある。
N;= -810 - 3830 N�vv = 4830 Nふ = -2820 - 4840 N;ωv = 8840
(5.19) NJ= C01
+
C21 N�vr = -2C21i
山
V:
1r l
=一- CO2N�vlrl
= -2821ただし 810,820ぅ830,840は斜航試験によって得られる値を、C02はそ の場回頭試験 から得られる値を用いるものとする。
XふYkもN�と同様な手続き で微係数の形式で記述できるが、計測値XいYム には、それぞれ付加質量に関 する項(m� - m�)
r'
sin ßおよび(m�
- m�)〆cos ßが含 まれるので、 この分を差し引いて 解析することに注意を要する。5.4.2 理論計算による船体流体力微係数の決定
上 述の例のように、 詳細な拘束模型試験が実施できる場合には、試験で得ら れた流体力結果に対して、試験法ならびに数学モデルに即した解析方法を適用
することによって 数学モデルにおける諸係数を決定できる。
以下では、模型試験を実施することなく諸係数を決定する試みとして、前章 までに示した大斜航角時における流体力の数値計算法を活用して理論的に求め る手法について、拘束模型試験の解析結果と比較しながら検討する。
(1) 斜航時の流体力微係数
主船体に関する本数学モデル(5.8)式、(5.9)式中において、まず船の斜航運動 のみに依存する流体力微係数咋Iv'Y:1vl' NふおよびN�vvvの決定について述べる。
これらの係数の決定は、第2章~第4章の方法で数値的に求めた主船体流体力 を直接活用できる。
Fig.5.3 の・印は、Table 5.1 に示したLNG船型を計算対象とし、斜航時の船 体流体力を数値計算によって求めた結果で・ある。ただし横軸は斜航角9を表し、
縦軸は船体に働く横力の無次元値YÍI= YH/(1/2pLdU2)および回頭モーメント の無次元値 N�= NH/(1/2pL2dU2)を示す。 計算条件は、本船型の前後非対称性 が左程著しくないことを考慮して前進状態、すなわちß= 00 I"V 900 の状態につ いてのみとした。 またFの刻みはß= 00 I"V 200の範囲では 2.50ごととし、ß= 200
I"V 900 では、50あるいは100間隔で計算した例である。
これらの計算値を最小自乗法によって次式の表現に回帰す れば所用の微係数 を特定できる。
ロ = 咋lulufluf+E;fluidld|
N; f f f f NL= lv;jtjf+ tlt
(5.20) u' = cosß
ザ = -sinß
Fig.5.3の実線は計算値の回帰結果を示し、0印は斜航試験の調和解析結果で ある。 同図を見ると、理論計算を用いて記述した斜航時の流体力と、模型試験 によって得られた流体力は大略一致していることが分る。
、I,r od
e AU
41・ ,rl、 nμ ハU
RJv
dEE'
nu
nJム dEEE
Lateral force and yaw moment acting on a LNGC as function of drift angle ß
LNGC : Exp.
一←:
Cal.
。
。
p、』
コ
て3c、4_J
Q_
ぱ3
---Cコ
z -0.1
Fig.5.3
Nコ℃」qm.0\〉
(2)
その場回頭時の流体力微係数その場回頭時の流体力微係数N:1rlは、(5.4)式に示したcross flow dragの概念 17)を用いると、次式によって求めることができる。
的L = -
j
pdι
ら(x)川rlx什
= Nrlrl' rlrl
J
(5.21)
なお船速u=oとなるその場回頭時の場合、Nr1rlを次式で無次元化すれば通 常の微係数と等価な係数が求まる。
NJlT|=NT|T|/
i
p山 (5.22)ここで(5.21)式におけるGD(x)は、 従来正確に求めることが困難であるパラ メータの一つであったが、 第2輩、 第3章で示した計算手法によって各横断面 のフレームライン形状に対応する船長方向分布を推定できる。Fig.5.4には、数
値計算によって求めたGD(x)を示す。
LNGC
。
ιJ
Y' = i �'�� ��aし)
ー l O.54 (Exp.)
8-:
Cal.
Fig.5.4 Distribution of cross fiow drag coe伍cient over ship's length
LNGC
。
: EXD.
: Caし(C6=Co(X))
: Cal.(Co=Co(x),Co( +Lj2)+2.0)
- 0.1 0
乙0.08
ミ三
z- 0.06
./"./"
o ""./"
./"
- 0.04
./" ,/。 ./"
./"
./"
- 0.02
/ハudEEE ハU
、、hE,F
K人qLrL C
f111'l e q】
,C nL O VE-
,,ZE--、
VE
ζJln川.E nu ハu
ハU nu
Fig.5.5 Yaw rnornent acting on a LNGC during pure yawing rnotion wi th zero forward speed
Fig.5.5は、(5.21)式によって求めたその場回頭時のモーメントNHを表し、横 軸に回頭角速度の2乗rlrl をとって示している。 図中の実線は計算結果を表し、
O印は拘束模型試験結果である。Fig.5.5を見ると、計測された回頭モーメント NHは、 明らかにrlrlに比例する傾向を示しており、cross fìow dragの概念に基
づく推定法は妥当であると思われるが、定量的には計測結果に比べて推定結果 はかなり小さい。
芳村14)は、(5.21)式中のGD(X)として真横移動時の斜航試験結果を用い船長 方向に一定としてGDOと記し、さらに回頭運動に対する補正係数GrNを導入し
てN� を次式のように表した。rlrl
N�LI Irl = -Gnn . G:'I\'--' UU - '--' rN/ T/32 (5.23)
芳村の PCC を供試船とした試験結果によれば、(5.23)式中のGDO � 0.7、
GrN � 1.5であり、幾何学的なcross flowの分布(GrN = 1.0)とは異なっている。 ま た高品78)が指摘しているように、LNG船を対象とした試験結果も GrN � 1.5で あることから、N;lrlとGDO との聞には船型によらず一応の相関らしきものが見 られる。 何れにせよこれら 2隻のデータのみでは絶対数が少なく、更なるデー タ収集が必要であると思われるが、N;lrlを(5.21)によって推定する場合、実際 のcross flow分布と 幾何学的なcross flow分布との相違を何らかの方法で考慮す る必要があると言える。
梅田ら15)は、斜航時と回頭時の渦流出は当然異なると考えられることから、
GD を断面の船長方向位置zのみならず、回頭角速度Tの関数として表し、計測 した流体力を精度良く記述している。 特にその場回頭時においては、船首尾断
面のGDが 3.0程度に大きくなっており、これは船首、船尾付近の断面からの渦 が鋭い曲率をも って流出することに対応しているとしている。 従って先のその 場回頭試験結果に見られた 幾何学的なcross flowの分布と実際の分布との相違 は、回頭運動に伴って船首・船尾を回り込む流れが強くなり、特に船首尾付近の cross flow分布が大きく変化することが一因になっていることが考えられる。
そこで回頭運動時 には、船首尾部を回り込む流れの影響によって船首部断面 のGD が見掛け上大きくなるものと考え、回頭運動時のF.P.、 A.P.断面のcross
flow dragの係数 GD(土L/2)1ゅoは次式のように表現できると仮定する。
GD(土L/2)1ゅ0= GD(土L/2)lr=O +ムGD(土L/2) (5.24)
ここでGD(土L/2)lr=Oは、回頭運動を伴わない横移動時のF.P.、A.P.断面のcross flow dragの係数を表し、ムGD(土L/2)は、回頭運動による見掛けのGD(土L/2)の 変化量を表すものとする。
なおムGD(土L/2)は、船首・船尾の形状、γの大きさによって複雑に変化する ことが考えられるが、 次のように簡単化して考える。すなわち梅田らの実験結
果によると、GD(土L/2)1吋o � 3.0程度がピークとなっていること、また第3章 で示したように真横移動時には船型によらずGD(土L/2)lr=O � 1.0であることか ら、 ここではムGD(土L/2)
=
2.0と仮定する。Fig.5.5における一点鎖線は(5.21)式中のGD(x)に対して、(5.24)式によって回 頭運動の影響を考慮した場合の計算結果であり、O印で示した計測値にほぼ対 応している。従って(5.24)式を用いて、さらにムGD(土L/2)
=
2.0とする簡便な取り扱いは、実用的には先のその場回頭試験結果に見られた幾何学的なcross fiow 分布と実際の分布との違いを概略考慮したものであることが分る。
結局、まず各横断面のフレームライン形状を考慮して真横移動時のGD(x)を 数値計算によって求め、回頭運動の影響を(5.24)式の簡便法によって加味するこ とにより、模型試験に頼ることなくcross fiowモデル(5.21)式によって実用的に は十分な精度で川Irl を推定できるものと思われる。
(3)
船速を有して回頭する時の流体力微係数微小な回頭運動時の揚力成分を表す線形微係数Y�r、N�r は、次式のような小 縦横比翼理論に基づく井上の推定式79)によって決定する。
むT= j付 )
Nム = -0.54k +
k2
�k
=
2d/ LJ
(5.25)
また回頭運動時のcross fiow dragの成分を表す非線形微係数幻rlrlは、次式の cross fiowモデルによって求めることができる。
YNL = -EPd /2CD(z)(ZT)|ZT|dz
= 九rlrl
. urlrl (5.26)EZT
IT
I= 九
rlrl / �
pLd
Uただし(5.26)式のGD(x)は、(5.24)式によって回頭運動の影響を考慮する。
次に斜航と回頭の連成運動に伴う流体力成分を表すY:1rl,N�vr およびN�vrr の 決定法について述べる。
まず高品によるYawRotating試験時と同様に、U= 0. 1 09, 0.218, 0.327 m/sec、T
= 2 ,3 ,4,5 deg/ secの計 12の組合わせのそれぞれの状態の下で、ß(u= U cosß ,υニ -U sin ß) = 50 rv 1800ま での範囲で50おきのYHおよびNHをCross flowモデ ル (5.4)式より 算定することとした。 次に(5. 7)式に従ってYH, NHを無次元化し てYふN�とし 、 それぞれの〆(=rL/U)の状態ごと に、YふN�を最小自乗法で が(= - sin ß)の2次式に近似して幻Irゆ0'N,ム|件。およびNιIrゆoを求める。 さ らにこ れらを最小自乗法でザの2次式に近似するとηrl'N�vrおよびN�vrrが 求まる。
なおN:1rlについては、船速を有する場合にも(5.21)、(5.22)および(5.24)式か ら得られるその場回頭時のN:1rlと等価である。
Fig.5.6 は斜航角Fを横軸にとり、r'ニ-2rv 2の運動範囲におけるYiIとNん を示す。 同図の実線、破線および一点鎖線はそれぞれ、r'= 0 ,土1.0および土2.0 の状態、に対するYふN�を示しており、計算によって数学モデルのパラメータを
求めた結果 である。 また0、 口-・、マ.Tは、YawRotating試験の解析結果 を示 す。
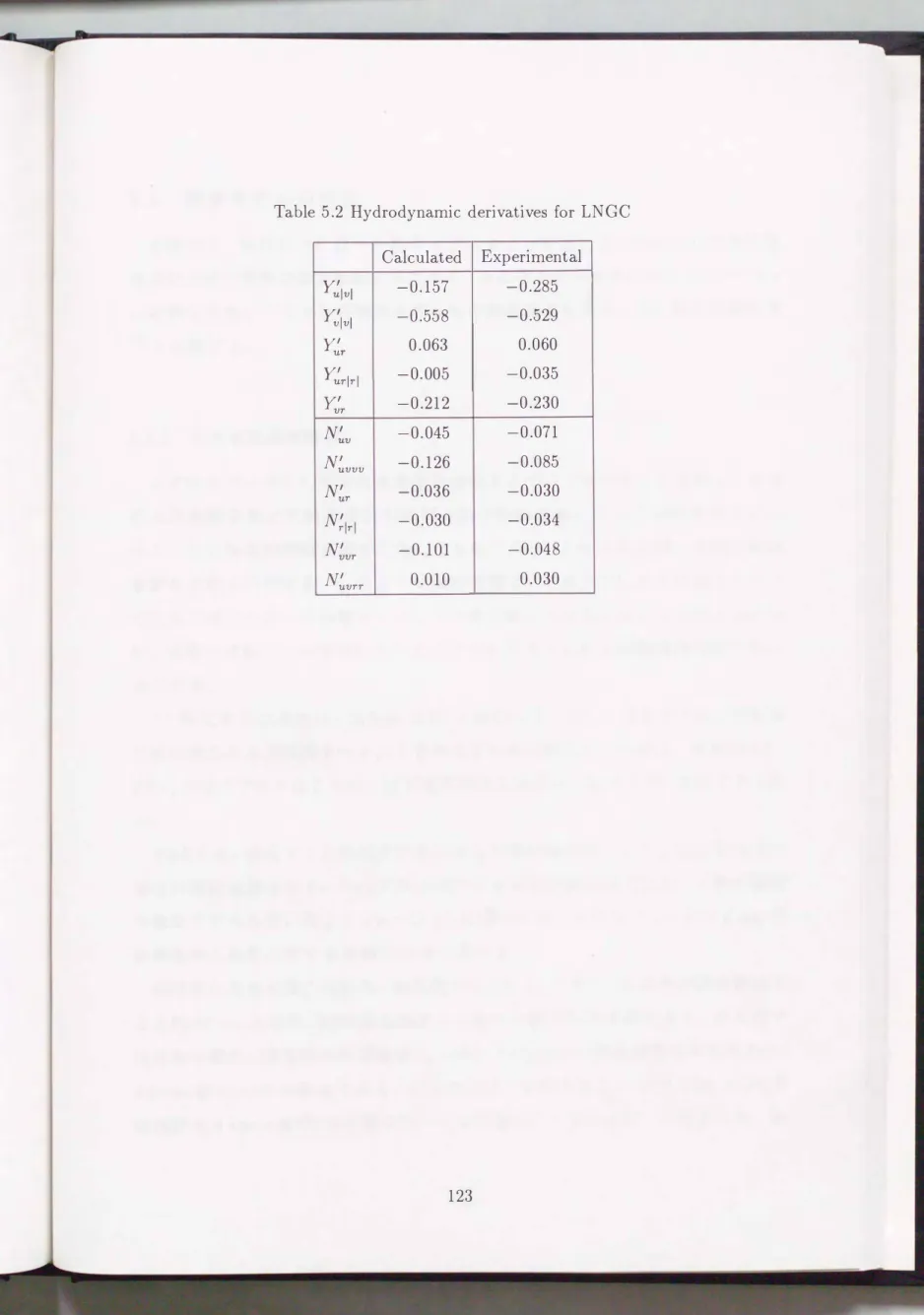
さらにTable5.2 には、計算によって求めた微係数値と、YawRotating試験結 果の解析 により得られた微係数値の比較を示す。
Fig.5.6あるし、はTable5.2 に示す ように、 特にß(= - sin-1 v')、r' が共に大き い状態、に対応した流体力成分 について、計算で求めた結果と模型試験の解析結 果との聞に 定量的な差異が生じていることが分る。 しかし計算で得られた流体 力特性は模型試験 によるものと大略一致していることから、 本数学モデルなら びに諸係数の決定法は、 港湾内等における船の操縦運動推定 に十分供すること
が期待で きる。
なお、 直進中の船体抵抗係数X;は、Schるenherr の式を用いた3次元外挿法 によって算出し、 操縦運動 によるz方向の抵抗変化X�rは、船体の方形係数Cb によって整理さ れた長谷川の推定図表80)を用いるものとする。 さらに付加質量 mx,myおよび付加慣性モーメント係数Jzzの値は元良チャート81)によって推定
する。
nunu nunu
,r2101
2 一一 4'ムE
JU
一一 一 一 C 一一 一 一一 ny VA V r」
•
。 ロ
マ
LNGC
2
Nコ
℃ J
q の.0\〉
-戸 -句、『・‘
r 一 、、 h、』
---:. . .. .. .. ---- --
戸/� ..
� �
.. 守 、--r_ ... .... . 司、ー
vr,r v ,,r-F『『』、 司, .--司r-- .,..ー... ____,..
_..-.-. . . . ー、 元、、
-It -.. ・ � " -
.-
N コ ℃N J q
の.0\Z
Lateral force and yaw moment acting on a LNGC during manoeuvring motion with forward speed
Fig.5.6
Table 5.2 Hydrodynamic derivatives for LNGC
Calculated Experimental
Y�lvl -0.157 -0.285
Y:1vl -0.558 -0.529
むT 0.063 0.060
Y�rlrl -0.005 -0.035
E7T -0.212 -0.230 N;U -0.045 -0.071 N�vvv -0.126 -0.085 N�r -0.036 -0.030
N;lrl -0.030 -0.034
N�vr -0.101 -0.048
N�vrr 0.010 0.030
5.5
数学モデルの検証
本節では、前 節までに述べた 数学モデルおよび 計算によって得られた諸係数 値の妥当性を 運動の場で検証するために、本数学モデルを用いたシミュレーショ ン計算を実施して大きな斜航角を伴う船の操縦運動を求め、自走模型試験結果 10)と比較する。
5.5.1 自走模型試験結果
まず検証デー タとして の自走模型試験結果について述べる。 本試験は、自由 航走模型船を用いて 斜航運動や回頭運動が前進運動に比べて同程度あるいは 大きくなる場合の操縦運動を 計測したものであり、これらの運動に及ぼす船速
影響を含むものである。 このような操縦運動は、プロペラによる前後力に比べ て大きな横力あるいは回頭モーメントを 模型船に与えることにより 実現される が、実際の操船では低速時に おけるタグや スラスタによる操縦運動等が これに 相当する。
5.3 節に示したように、供試船はLNG船型のL = 5.0 m模型である。 なお 模 型船に横力および回頭モーメントを与えるために搭載された 船首、船尾
(
8.8.9 "8.8.1
)
の空中ファンのことを、以下便宜的に それぞれ、船首 タク二船尾タグと呼 三ミ。Fig.5.7は、船首 タグと船尾タグを併用して横移動を行うように横力を与えた 場合の運動航跡を示す。 Fig.5.7の上段が 自走模型試験結果であり、下段が前述 の数学モデルを用いたシミュレーション結果である。 ただしシミュレーションの 計算条件と結果に対する考察は次項で述べる。
模型船に与えた横力は 船首、船尾何れも0.57kg であり、この力は実船換算す ると約90 tonとなり、3000馬力のタグ 3隻分の推力にほぼ相当する。 また図で は左から順に、模型船の初期船速Uo = 0.0、0.14 m
/
sec(
実船換算でそれぞれ0、2 knots相当
)
の時の結果である。 なお高品は、初期船速Uo = 0.28, 0.42 m/
sec実(
線換算4, 6 knots相当
)
の状態についても試験を行って いるが、 本研究では、極Uo=o.oo
m/sec
Uo=0.14m/sec
Measured (LNGC)
Simulated (LNGC)
(丁目=一0.57 kg,
Ts=-0.57 kg)
Fig.5.7 Lateral shifting motion due to tugs pushing both bow and stern for a LNGC
低速時の操縦運動に焦点を絞り、Uo = 0および0.14 m/secの計測データのみを 検証用データとした。
模型船の前進速度はプロペラによって与え、前進速度が定常になった時点で 空中ファンの作動を開始しており、空間固定座標の原点はこの時の船体中心位 置にとっている。空中ファン作動後もプロペラは回転数一定で作動し、舵角は 常に00としている。なお、 同図では空中ファン作動開始からの船体中心の航跡 を実線で表し、模型船の船影を10secごとに表示している。また縦軸、横軸は
何れも、船長Lに対する比を表す。
Fig.5.7の模型試験結果を見ると、前進速度の影響によって横移動が困難にな る傾向が分る。これは前進速度を有する場合、船体に作用する流体力は船速の 2乗で増加するのに対し、与える外力が一定であるために相対的にタグの効果 が減少することによるものと思われる。なおこの傾向は以下のタグによる運動 にも見られる。
Fig.5.8 の船首タク二船尾タグを併用したその場回頭運動についても、前進速 度によってタグの効果が減少していることが分る。
Fig.5.9の船首タグを単独に使用した時の回頭運動では、ß,r'がさほど大きく ない通常の操縦運動に比較的近い。
Fig.5.10の船尾タグのみによる運動は、船首タグによる運動とは異なり、特 にUo = 0.14 m/secの場合には、グが時間と共に00f'.J 1800まで変化する複雑な 運動が見られる。ただし図中において、船体中心線(船体固定座標系のz軸)と 船体重心における運動航跡の接線とのなす角が グである。船尾タグによる回頭 運動では、回頭による遠心力が船を後進させる方向に作用するのに対し、プロ ペラが前進方向の推力を発生しているため、両者のバランスにより 運動が複雑 に変化するものと思われる。
Uo=O.OO
m/sec
Uo=0.14 m/secMeasured (
LNGC)
Simulated (
LNGC)
(T
B=一0.57kg, T
s=+0.57kg)
Fig.5.8 Turning motion due to tugs pushing both bow and stern for a LNGC
Uo=O.OO
m/sec
Measured (LNGC)
Simulated (LNGC)
Uo=O.14
m/sec
(丁目=-0.57 kg,
Ts= 0.00 kg)
Fig.5.9 Turning motion due to a tug pushing bow for a LNGC
Uo=O.OO
m/sec
Uo=O.14m/sec
Measured (LNGC)
- 2 -1
Simulated (LNGC)
(T B= 0.00 kg, T 5=+0.57 kg)
Fig.5.10 Turning motion due to a tug pushing stern for a LNGC
5.5.2 シミュレーション計算と自走模型試験結果との比較
次に自走模型試験に対応したシミュレーション計算を行い、自走模型試験結 果と比較しながら、シミュレーション計算に用いた主船体流体力の数学モデル および流体力微係数値について考察する。
シミュレーション計算の結果は、前出のFig.5.7f"V 5.10の下段に、模型試験結 果と対比させて示した。 まず船首尾タグを併用した横移動運動に関するシミュ レーション結果は、Fig.5.7に示すように、船はほとんど回頭運動を伴うことな く斜航し、 また前進速度の影響によって横移動が困難になっていることから、模 型試験で見られた横移動時の運動特性を良く捉らえているように思われる。
Fig.5.8に示した船首尾タグの併用によるその場回頭運動についても、前進速 度の影響も含めてシミュレーション計算結果と模型試験結果は大略良く一致し ているようである。
Fig.5.9に示した船首タグを独立に使用した場合のシミュレーション計算結果 は、初期船速を有する場合、船が初期状態から 1800回頭した後の回頭角の発達 が模型試験結果よりも小さくなる傾向を示しているが、初期船速がない場合に ついては、模型試験結果と良好に一致している。
一方Fig.5.10に示した船尾タグによる回頭運動のシミュレーション結果は、 回 頭角の発達については模型試験結果と概ね良く一致しており、 また斜航角9が 大幅に変化する特徴や初期船速の影響によって船の運動が異なる様子が良く再 現されているように思われる。 しかし運動航跡を見ると、シミュレーション結 果は模型試験結果に比べて、初期船速の有無に関わらず旋回半径を大きく見積 もっていることが分る。
そこで船尾タグによる運動航跡に関するシミュレーション結果と模型試験結 果の相異が主として数学モデルに起因するのか、あるいは数学モデル中の流体 力微係数の推定精度によって生じたものか調べた例をFig.5.11に示す。 ただし Fig.5.11は、シミュレーション計算に用いた数学モデルはFig.5.7f"V Fig.5.10のも のと同一で・あるが、斜航と回頭の連成運動に関する流体力微係数幻Irl'N�vrおよ びNふrrの値を、Table 5.2に示した計算による微係数値の代わりにYaw Rotating
Uo = 0.14
m/sec
(T
B= 0.00kg, T
s=+0.57kg)
Y
_j5
x/L
Fig.5.11 Simulated using hydrodynamic forces obtained from captive model tests
試験結果の解析により得た微係数値を代入したシミュレーション計算例である。
なおFig.5.11におけるUo = 0.14 m/secとする。
Fig.5.11のシミュレーション結果は、運動航跡についても模型試験結果と非常 に良く一致していることから、斜航と回頭が共に大きい場合の連成運動に基づ く船体流体力の推定精度を向上させれば、 より精度良い操縦運動の推定が行え るものと思われる。
以上のように、推定精度の上でやや不十分な部分も見受けられたが、本シミュ レーション結果はタグ操船によって実現される多様な運動の特徴を全体的には
良く捉らえている。 従って船体流体力に関する本数学モデルならびに数学モデ ルに含まれる諸係数値の推定法は、 大斜航角を伴う船の操縦運動を特に模型試 験を行うことなく取り扱う場合に有効な手法になるものと考える。
5.6
大きな斜航角を伴う船の操縦特性に及ぼす船型の影響
前節までにおいては、大きな斜航角を伴う船の操縦運動を 対象とした主船体 流体力の数学モデルおよび数学モデルに含まれる諸係数値の推定法について述 べると共にその検証を行った。 次にこれらの成果が実際の問題にどのように応 用されるのか、応用例を示しながら考える。
例えば港湾域における操縦運動に関する問題を考えると、低速航行中の船の 安全性の観点から、個々の船に要求される舵面積やスラスタ容量の決定に関す る問題は、造船設計で取り扱われる代表的な検討課題である82)。 また特定の港 湾に過去に例のない大型船を入港させる場合の操船方法の検討、入港基準の策 定、大型船の入港が可能となるような港湾レイアウトの設計等は、操船シナリ
オの作成に代表される操船設計や港湾設計に深く関わる83)。
このような問題を検討する手段として、操縦運動あるいは操船シミュレーショ ンが最も効果的な手段のーっとなることは異論の余地のないことと思われる。
従って本研究の成果は、このような操縦運動のシミュレーション計算の基本とな る数学モデルという形で反映され、港湾域の操縦運動に関する諸検討等に有効 に活用されるべきものである。
事実、 新しい船を建造する場合、仕様書上で模型試験やシミュレーション計 算によって設計の初期段階で操縦性能に関する検討を十分行うことを明記する ケースも増えてきている。 またIMO
(
国際海事機関)では、船舶の航行安全を確 保する上での施策のーっとして、操船者に自船の操縦性能を十分に熟知させう るために、個々の船舶の主要な操縦性能を記載したManoeuvring bookletを備え ることを勧告している4)。 従って造船者にとって、要求された操縦性能について の仕様を満足するよう船を設計、建造することはもちろんのこと、設計あるい は建造された個々の船の操縦性能に関する正確な情報を操船者へ伝えることも 重要であると考える。しかしこれらの検討段階では時間的な制約もあり、対象船 舶に関する拘束模型試験を実施できないのがむしろ一般的であり、その場合に は数学モデルで使用する流体力微係数を何らかの方法で推定する必要がある。本節では、 本計算法が特に、数学モデルに含まれる諸係数の値を模型試験を
行う ことなく船型要素を考慮して推定できるという特長を持つこと、 また船が 大きな斜航角を伴う場合の操縦運動と船型との関連についての研究例はほとん ど公表されていないことから、2隻の異なる船型を対象にシミュレーション計算 を行い、船型の違いが大斜航角時の船の操縦特性に及ぼす影響について調べる ことにより、 造船設計や操船設計への応用の可能性について考える。
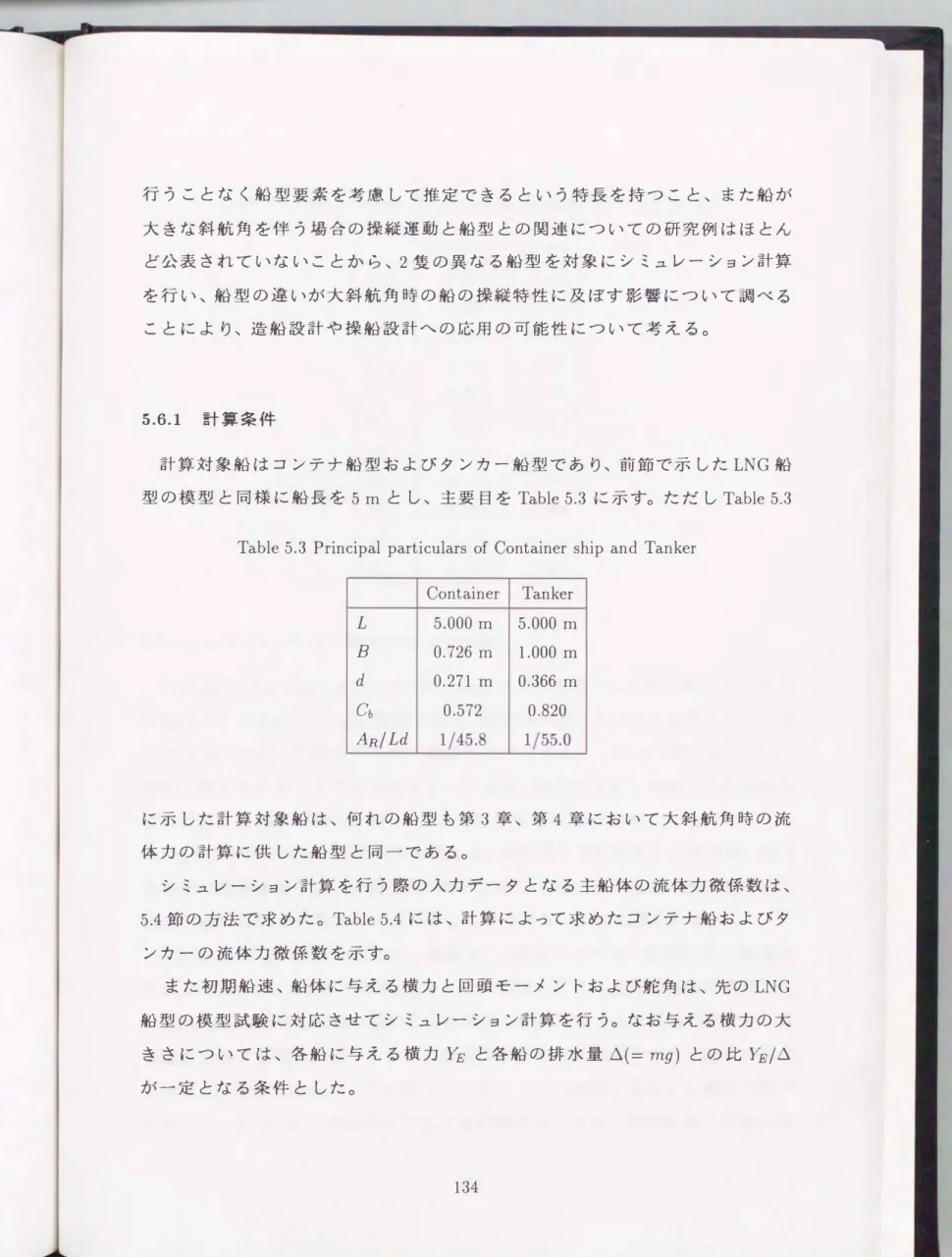
5.6.1 計算条件
計算対象船はコンテナ船型およびタンカー船型であり、前節で示したLNG船 型の模型と同様に船長を 5mとし、主要目をTable 5.3 に示す。 ただしTable 5.3
Table 5.3 Principal particulars of Container ship and Tanker
Container Tanker
L 5.000 m 5.000 m B 0.726 m 1.000 m
d 0.271 m 0.366 m
Cb 0.572 0.820
AR/Ld
に示した計算対象船は、 何れの船型も第3 章、第4章において大斜航角時の流 体力の計算に供した船型と同ーである。
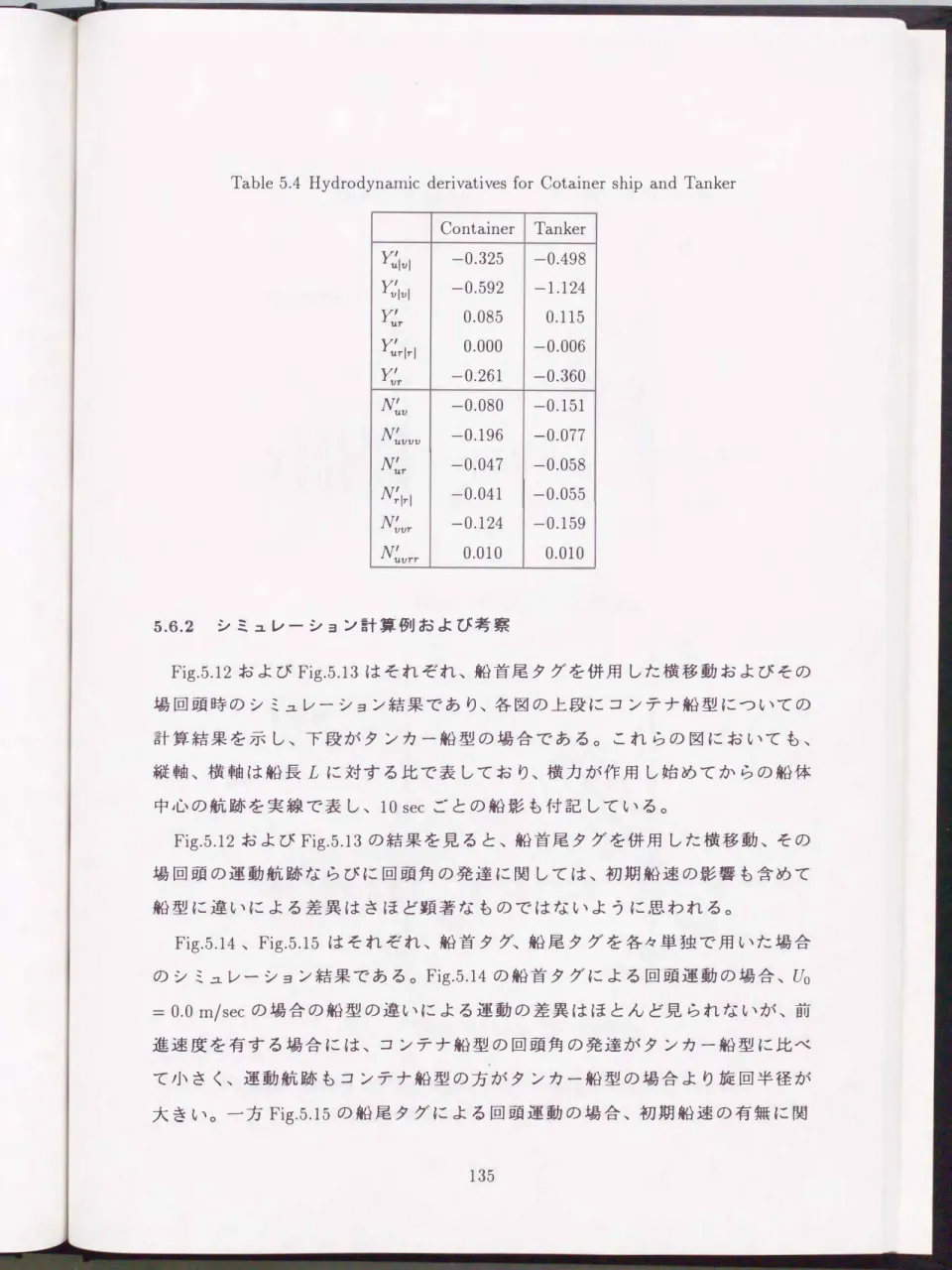
シミュレーション計算を行う際の入力データとなる主船体の流体力微係数は、
5.4節の方法で求めた。 Table 5.4には、計算によって求めたコンテナ船およびタ ンカーの流体力微係数を示す。
また初期船速、船体に与える横力と回頭モーメントおよび舵角は、先のLNG 船型の模型試験に対応させてシミュレーション計算を行う。 なお与える横力の大 きさについては、 各船に与える横力均と各船の排水量ム(= mg) との比む/ム が一定となる条件とした。
Table 5.4 Hydrodynamic derivatives for Cotainer ship and Tanker
Container Tanker む|υ| -0.325 -0.498 Y:1vl -0.592 -1.124
EZT 0.085 0.115
Y�rlrl 0.000 -0.006
Y:r -0.261 -0.360 N�v -0.080 -0.151 N�vvv -0.196 -0.077 N�r -0.047 -0.058
N:1rl -0.041 -0.055
N�vr -0.124 -0.159 N�vrr 0.010 0.010
5.6.2 シミュレーション計算例および考察
Fig.5.12およびFig.5.13はそれぞれ、船首尾タグを併用した横移動およびその 場回頭時のシミュレーション結果であり、各図の上段にコンテナ船型についての 計算結果を示し、 下段がタンカー船型の場合である。 これらの図においても、
縦軸、 横軸は船長Lに対する比で表しており、横カが作用し始めてからの船体 中心の航跡を実線で表し、 10 secごとの船影も付記している。
Fig.5.12およびFig.5.13の結果を見ると、船首尾タグを併用した横移動、その 場回頭の運動航跡ならびに回頭角の発達に関しては、初期船速の影響も含めて 船型に違いによる差異はさほど顕著なものではないように思われる。
Fig.5.14、Fig.5.15 はそれぞれ、船首タグ、船尾タグを各々単独で用いた場合 のシミュレーション結果である。Fig.5.14の船首タグによる回頭運動の場合、U。
= 0.0 m/secの場合の船型の違いによる運動の差異はほとんど見られないが、前 進速度を有する場合には、コンテナ船型の回頭角の発達がタンカー船型に比べ て小さく、 運動航跡もコンテナ船型の方がタンカー船型の場合より旋回半径が 大きい。 一方Fig.5.15の船尾タグによる回頭運動の場合、初期船速の有無に関
白V A叩J7
nU nu nU HU
Uo= 0.14叫sec
一」
x
Container
(T 8=-0.56 kg, T
s=-0.56kg)
T anker
(T
8=-1.48kg, T
sご-1.48kg)
Fig.5.12 Lateral shifting motion due to tugs pushing both bow and stern for a container ship & tanker
Uo
= 0.00 叫sec
_J
Cコ
3
xUo
= 0.14叫sec
_J
Cコ
×
Container
n,L
(T 8=-0.56 kg, T s=+0.56 kg)
T anker
-2 -1
(丁目=-1.48 kg, T s=+ 1.48 kg)
Fig.5.13 Turning motion due to tugs pushing both bow and stern for a container ship & tanker
Uo = 0.00吋sec Uo=0.14叫sec
31 ごてとx
31<
x
Container
(T 8=-0.56 kg, T s= 0.00 kg)
Tanker
-2
(T8=-1.48 kg, Ts= 0.00 kg)
Fig.5.14 Turning motion due to a tug pushing bow for a container shi p & tanker
Uo
=0.00 m/sec Uo=0.14川sec
一」
x
Container
Tロnker
-2 -1
_.I
Cコ
x
(丁目=
0.00 kg, T
s=+0.56kg)
(T8= 0.00 kg, Ts=+1.48 kg)
Fig.5.15 Turning motion due to a tug pushing stern for a container shi p & tanker
わらず船型による運動特性の違いがより明確に現れており、 コンテナ船型の旋 回半径はタンカー船型やFig.5.1 0に示したLNG船型の場合に比べて5rv6割程 度大きい結果となっている。
ここで実際の港湾内等での操縦運動 を考える場合、Fig.5.12、Fig.5.13で示し た船首タグおよび船尾タグを用いた操船はそれぞれ、 出港時および入港時に比 較的多用される操船ノマターンである。 ターニングベースンが船長の2倍となっ ている港湾基準の場合71)、Fig.5.14およびFig.5.15のシミュレーション結果を見 る限り においては、 本コンテナ船の場合、 出入港時の運航については十分注意 を払う必要があることを示していることになる。
もちろんこれらのシミュレーション結果に関しては、 今後、 実船試験、模型試 験による実績値との比較によって妥当性の検証を行う必要があると考える。 し かしこれまで大斜航角を伴う広範囲な操縦運動に対する流体力微係数の推定法 が確立されていないことを考えると、模型試験を行うことなく個々の船型を対 象に基本的な運動特性が推定できる本手法は、特に設計の初期段階において操 縦性能に関する諸検討を行う上で有用であると思われる。
5.7 結言
本章では、前章までに示した広範な斜航状態における船体のcross flowに着目
した理論的な考察を基に、船が大きな斜航角を伴う時の操縦運動数学モデルに ついて考えた。次に船体流体力に関する検証データを得るための拘束模型試験 法および結果の解析方法について述べた後、模型試験の解析結果と比較しなが ら数学モデルに含まれる諸係数を理論的に求める方法を示した。 さらに本数学 モデルを用いて大斜航角時の船の操縦運動をシミュレーション計算を行い、自走 模型試験結果との比較を通して数学モデルおよび数学モデルに含まれる諸係数 値の妥当性について検証した。 最後に、本数学モデルおよび諸係数値の推定法 の造船設計あるいは操船設計への応用の可能性を考察するために、 シミュレー ション計算によって船型と大斜航角時の操縦特性との関連について調べた。
本章で得られた結果を要約すると次のようになる。
(1) Cross flow dragの概念を基に、前進運動が支配的な場合の通常の数学モデ ルとの対応も考慮に入れつつ、大斜航角を伴う船の操縦運動を対象とした 主船体流体力に関する数学モデルを導いた。
(2)拘束模型試験結果とcross flowの概念から得られる船体流体力との比較か ら、第2章および第3章で述べた推定法で得られる真横移動時のcross flow dragの船長方向分布に対して、回頭運動の影響を考慮で きる簡便な手法 を提案した。 その結果、斜航のみならず回頭運動が大きい状態に対応した 船体の流体力微係数についても、模型試験を行うことなくしかも精度良く 推定可能となることを示した。
(3)本章で 導いた数学モデルおよび計算によって求めた流体力微係数を用い て、タグ操船に関する自走模型試験に対応したシミュレーション計算を行 い模型試験結果と比較した。その結果、シミュレーション計算は自走模型試 験で見られた多様な操縦運動を全体的に良く再現していることが分った。
(4)これらの比較により、本章で 示した数学モデルおよび諸係数値の推定法 は、大きな斜航角を伴う船の操縦運動計算に対し有効であることを確認し
た。しかしやや不十分な精度の運動計算結果もあり、特に斜航・ 回頭が共 に大きい連成運動時の 流体力の推定精度を向上させる必要性が明らかに なった。
(5)検証した上記数学モデルおよび諸係数の推定法を用いて、異なる2隻の船 型を 対象 にシミュレーション計算を行い、船型と大斜航角を伴う船の操縦 特性との関連を調べた。設計の初期段階では、時間的な制約から対象船舶 の模型試験を 実施できない場合が多く、模型試験を行うことなく船型を加 味して流体力微係数を推定し、 さらにシミュレーション計算によって個々 の船の操縦運動を求める本手法は、造船設計あるいは操船設計への応用の 可能性を 考える上で極めて有意であると思われる。
(6)しかし今後種々の船型に対するシミュレーション計算を行い、実船試験、模 型試験による実績値との比較によって妥当性の検証を行っていく 必要があ ると考える。