「心疾患診断・治療統合支援システム」
事業原簿
作成者 新エネルギー・産業技術総合開発機構 健康福祉技術開発室
作成時期 H13年10月17日
‑目 次‑
「心疾患診断・治療統合支援システム」
事業原簿
0. 概要……… 3
1 . 国 の 関 与 の 必 要 性 ・ 制 度 へ の 適 合 性 … … … 5
1 . 1 国 が 関 与 す る こ と の 意 義 … … … … … … … 5
1 . 2 費 用 対 効 果 … … … 5
2 . 事 業 の 背 景 ・ 目 的 ・ 位 置 づ け … … … 5
2.1 事業の背景・目的・意義……… 5
2.2 事業の位置付け……… 7
2.3.省エネ効果の試算……… …8
3 . 事 業 の 目 標 … … … 9 4 . 事 業 の 計 画 内 容 … … … 1 1 4 . 1 事 業 全 体 、 個 別 研 究 開 発 項 目 の 計 画 内 容 … … … 1 1 4 . 2 研 究 開 発 項 目 毎 の 内 容 の 詳 細 … … … 2 0 4 . 3 研 究 開 発 実 施 主 体 の 体 制 … … … 2 5 5 . 実 用 化 、 事 業 化 の 見 通 し ( 政 策 目 的 達 成 時 の イ メ ー ジ ) … … … 2 9 6 . 今 後 の 展 開 ( 政 策 目 的 達 成 ま で の シ ナ リ オ ) … … … 2 9 7 . 中 間 ・ 事 後 評 価 の 評 価 項 目 ・ 評 価 基 準 、 評 価 手 法 及 び 実 施 時 期 … … 3 0 8 . 研 究 開 発 成 果 … … … 3 0 8 . 1 事 業 全 体 の 成 果 … … … 3 0 8 . 2 研 究 開 発 項 目 毎 の 成 果 … … … 3 2 9 . 情 勢 変 化 へ の 対 応 … … … 3 8 1 0 . 今 後 の 事 業 の 方 向 性 … … … 3 8 1 1 . 添 付 資 料 「 基 本 計 画 」 … … … 3 9
0 .概要
制度名 医療福祉機器技術研究開発 事業名 心疾患診断・治療統合支援システム 事業の概要 多様な情報を非侵襲で獲得可能な MRI のモニタ下で,主に虚血性心疾患
に対する診断と低侵襲な治療を統合的に支援するシステムを開発すること で,手術成績・患者のQOLの向上,総合的な医療コスト低減を可能にする.
(事業の類型:1.革新的技術シーズ発掘段階) 1.国の関与の必要
性・制度への適合 性
医療機器の開発は、人間の生命に係る分野であることから、非常に高い 安全性・信頼性が求められ、特に新規性の高い技術は、資金、開発期間 等、非常に多大な開発コストを要する。一方臨床上の効果等が評価でき ない開発前段階では、診療報酬上の取り扱いは明確にできず、このよう な償還の不確実性は開発を進める上で大きなネックになっている。
したがって、革新的な技術開発により、国民の健康寿命延伸に資すると ともに、国際的な競争力を強化するためには、様々な関連施策と併せて、
産学官が結集し、役割分担と連携体制を明確化しつつ、国のプロジェク トとして一体的に推進することが必要である。
2.事業の背景・目 的・位置づけ
西暦2020年には全人口の3分の1を65歳以上が占めるという高齢化社 会において、低侵襲手術による入院期間短縮とそれに伴う医療コスト削 減が当該事業の目的であり、術中にMRIおよび超音波による撮像を行 うとともに、これと複合して心疾患を治療対象とした操縦型マニピュレ ータを含むトータルシステムの開発を行う。
3.事業の目標
(全体目標)
MRI モニタ下で光学内視鏡・超音波スキャナを併用し各種画像情報を 術中に獲得・提供しながら,MRI と干渉しない操縦型マニピュレータ により医師の心疾患治療を支援する診断・治療統合支援システムの開発 を目標とする.
4.事業の計画内容 (単位:百万円)
H11fy H12fy H13fy H14fy H15fy 総 額
(5年間)
当初計画額(提案書) 45 264 166 132 93 699 年度別予算(節約前) 44 119 119
年度別予算(節約後) 44 114
一般会計 44 114 66
特別会計(電特) − − − 特別会計(石特) − − 52
特別会計(エネ高) − − − 総予算額(計) 44 114 119
省内担当原課 工業技術院医療福祉機器技術研究開発調整室(開始時) 商務情報政策局サービス産業課医療福祉機器産業室 (現在)
運営機関 新エネルギー・産業技術総合開発機構 委託先 技術研究組合医療福祉機器研究所
(分担企業 (株)日立製作所,瑞穂医科工業(株))
再委託先 杏林大学 研究開発体制
(実態に併せて記載)
共同研究先 なし 5.実用化,事業化
の見通し
プロジェクト終了後には,臨床試験に移行可能と考えている.またMR 適合性による差別化で事業性は十分にあると考えている.
6.今後の展開 終了時より臨床評価向け開発を開始し,臨床医の評価を元に製品化設計 を行い臨床試験・医療機器認定を経たのち製品化を行う.
7.中間・事後評価 事前評価時に定めていないが,以下のように考えている.
中間では最終目標に対する中間段階としての達成度を,見通しを含めて 評価.事後は提案時の実施計画記載の目標値に基づいた定量評価.特に 最終評価にあたっては,ユーザ(医師ら)による試用実験を通じた評価を 希望.
8.研究開発成果 特許(出願)数:4(4),査読論文数:1,新聞発表数:0
基本計画の変更 (該当せず 但しマニピュレータ仕様は見直しを実施 した)
変更内容 (同上) 9.情勢変化への対
応
評価履歴 (該当せず) 10.今後の事業の方
向性
中間評価結果に基づき事業の方向性検討を行う。
作成日 平成13年10月15日
1 .国の関与の必要性・制度への適合性
1.1 国が関与することへの意義
当該事業においては,核磁気共鳴画像診断装置(以下,MRI)環境下で超音波スキ ャナ・光学内視鏡を併用し,操縦型マニピュレータによる精密な術式展開を行うこ とにより,心疾患特に心筋梗塞を始めとした虚血性心疾患の診断・治療を統合的に 支援するシステムの構築を図る.これにより,今後予想される虚血性心疾患患者の 診断・治療需要の急増に的確に対応するという社会的要請に応えることが期待され る.しかし,医療機器の開発は、人間の生命に係る分野であることから、非常に高 い安全性・信頼性が求められ、特に新規性の高い技術は、資金、開発期間等、非常 に多大な開発コストを要する。一方臨床上の効果等が評価できない開発前段階では、
診療報酬上の取り扱いは明確にできず、このような償還の不確実性は開発を進める 上で大きなネックになっている。
したがって、革新的な技術開発により、国民の健康寿命延伸に資するとともに、
国際的な競争力を強化するためには、様々な関連施策と併せて、産学官が結集し、
役割分担と連携体制を明確化しつつ、国のプロジェクトとして一体的に推進するこ とが必要である。
1.2 費用対効果
当該事業によって,心疾患特に心筋梗塞を始めとした虚血性心疾患の治療をより 低侵襲に行うことができるようなシステムの開発がなされる.それによって,患者 の入院日数は短縮され,本人負担および医療保険制度に対する負担が大幅に軽減さ れる.また患者の予後の生活の質が向上し,社会復帰の割合が高まることで,社会 全体の生産力拡大へ寄与するという効果もある.さらに,治療・回復に要する日数 の短縮に伴うエネルギ節約効果もある.その他,経済的効果としては,画像診断機 器・医療計測機器ビジネスの活性化・世界市場におけるイニシャティヴの獲得など が考えられる.以上を鑑みると,プロジェクト費用に対する社会的・経済的効果は 非常に高いと言える.
2 .事業の背景・目的・位置付け
2.1 事業の背景・目的・意義 (1)社会的背景
高齢化・少子化の進む日本では,西暦2020年には全人口の三分の一を65歳以上 が占めるといわれている.それに伴い保険システムの破綻が懸念され,医療コスト の低減が大きな課題になっている.コスト低減に最も効果的なのは入院期間を短縮 することである.この入院期間は低侵襲手術の発達・普及によって劇的に短縮され ると予測されており,医療現場の大きな期待を集めている.例えば近年,低侵襲手 術の嚆矢とも言うべき内視鏡下手術が普及し始めている.これは体腔内に進入させ た内視鏡の映像を見ながら,体表に開けた穴を通した鉗子等の術具によって治療を 行うといった,侵襲性の低い術式の手術である.このような低侵襲手術は,医師の みならず患者側にも受け入れられるようになり,これを重要視する社会的コンセン サスが得られつつある.さらに,エイズや MRSA等の院内感染の問題に対する有 効な対応手段としても期待されている.
一方,これまでの医療関係費は主に高価な医療計測機器に投資されてきている.
特に MRI は広く普及しており,診断において多くの情報を提供できるようになっ た意義は大きい.また医療計測機器の間近での診断・治療行為をルーチンとする医 師からは,MRI のような原理上被曝を伴わないものを望む声が数多く聞かれる.
さらに近年,外からガントリ内へのアクセスが可能な開放型 MRI が実用化してお り,国内外で所謂インターベンショナル MRI の気運が一気に高まっている.この ような MRI をさらに有効に活用でき,かつ低侵襲で,より安全な診断・治療を支 援するシステムの開発は急務であると言えよう.それは即ち,各種臓器はもとより,
高齢者に多くみられる股関節や膝の手術などにおいても元々の身体機能に近いレ ベルまで回復可能な,精密でかつ傷口が小さく患者へのダメージを極小に抑えた必 要最小限の手術を行うことのできるシステムである.
(2)技術的背景
医療機器業界では,高度な電子技術・計算機技術を利用した X線CT やMRIな どの各種画像計測装置が開発され,体組織を侵襲することなく体外から臓器の様子 を計測できる.近年では計測精度が上がりミリ単位の疾患まで発見できるようにな ったため,これらの情報を利用して,より信頼性の高い高度な治療が行えるように なった.特に MRI は原理上被曝の問題がなく,撮像方式および画像処理が高速・
高機能化してきているため,短時間かつ短い周期で高精細な画像情報が得られるよ うになってきており,近い将来には実時間で臓器変形検出や血管系の撮像を行い得 る可能性がある.また,超音波スキャナも同様に,短時間で局所的な三次元血流計 測等を行えるレベルに近付いており,多様な画像情報を統合的に術中利用できる技 術的な基盤が作られつつある.
一方で,胸腔・腹腔内臓器に対する内視鏡下手術が普及するのに伴い種々の高度 治療用器具が開発されているが,それらを駆使して治療を行うには豊富な臨床経験 を持つ医師にとっても熟練が必要である.また,それらの器具の操作は内視鏡から のごく限られた範囲の映像のみに頼るため医師の負担が大きい.循環器系に至って は,術式によっては対象臓器の形状変化が著しいという問題や,血管内では光学的 視野が確保できる保証がないといった問題もあるため,局所的な視野を与える内視 鏡等だけでなく,対象臓器とその近傍を含めた全体的な構造を提示してくれる計測 機器の併用が必要である.
これに対し,近年のマニピュレーション技術は,成熟したロボット制御技術を背 景に上記各種器具の操作性向上を目的とした操作支援システムを開発できる高い レベルにある.また,MRI の磁場中に置かれてもそこから力を受けない若しくは 画像に歪みなどを齎すことのない材料,例えばセラミックスや強度の高いプラステ ィック等の成型・加工技術は格段に進歩しており,今やこれらの材料を構造材や要 素部品として利用することが可能となった.これに伴い磁場中で使用できるアクチ ュエータも開発されており,MRI の磁場の中で動作可能な機構を技術的に検討で きる状況即ち,術中計測のモダリティとして超音波等に加えて MRI を考慮に入れ ることが可能な状況になってきている.
(3)事業選定の経緯
本プロジェクトは、通商産業省工業技術院・医療福祉機器技術研究開発調整室よ り、平成11年度医療福祉機器技術研究開発テーマとして募集され、工業技術院 調査委員会にて検討後、第42回産業技術審議会産業科学技術開発部会医療福祉
採択の背景としては、内視鏡による低侵襲診断・治療には患者の負担軽減及び 入院期間短縮等の利点があるが、心疾患系の診断・治療に用いるには、呼吸や拍 動による臓器の位置・形状変化の問題があり、この点で使用上の制約がある。そ こでこれら条件下でも使用可能な低侵襲な診断・治療を一元化した手術支援統合 システムの開発が必要と判断された。
NEDOでは平成10年 12 月より、医学系‑工学系専門委員より構成される開発 推進委員会を発足し、技術的課題と対応方法、及び基本計画内容につき審議及び検 討を行った。
(4)事業の目的・意義
当該事業は前節の背景に鑑み,対象とする組織表面の狭い範囲の観察を可能にす る内視鏡に加えて,血液などで不透明な部分や組織の内部の局所的な画像計測を行 うことのできる超音波スキャナのモニタ下で臓器およびその周辺を含めた全体的 な構造を提示できるMRIを併用して準動的な実時間画像情報を提供しながら,MRI の磁場中でも計測画像に歪などの影響を及ぼしたりせず,かつ磁場に起因する干渉 力を受けることなく動作可能な手術操作用マニピュレータシステムを用いて医師 の操作を支援する,低侵襲でかつ高信頼な診断・治療支援システムの開発を目的と するものである.
現行の内視鏡下手術は執刀医が細長い術具を操るための広い空間を必要とする.
同一の術式を狭い MRI ガントリ内で行おうとすると,熟練した術者であってもそ の手技を十全に発揮することが困難となる.またそのような狭い空間では執刀医に 対する肉体的・精神的負担は極めて多大となり,長時間の治療行為は事実上不可能 である.従って手術の操作を支援する操作支援システムが不可欠となるが,これを 実現するためには磁場中で動作可能な機構などの開発が必須である.また操作手順 や内容を決定し進行状況を把握するためには,従来の内視鏡のほかに小型かつ磁場 低感度な超音波プローブの開発,および各種画像情報やセンサ情報を提示する手段 の実装が必要であることは言うまでもない.
MRIの性能向上・開放型MRIの出現という技術的動向,および今日の社会背景 に根ざしたシステムの必要性・実現可能性の急激な高まりを考慮すると,現時点で このようなシステムの開発に着手することは最良の選択であるといえる.心疾患は 悪性新生物・脳血管疾患と並ぶ日本人の三大死亡原因のひとつであり,全死亡原因 の約四分の一を占める.さらに医療保険制度の先行き懸念を考えると,本提案シス テムの早期実現はまさに火急の案件であると言える.
2.2 事業の位置付け
当該事業は,MRI 環境下で超音波スキャナ・光学内視鏡を併用し,操縦型マニ ピュレータによる精密な術式展開を行うことにより,心疾患特に心筋梗塞を始めと した虚血性心疾患の診断・治療を統合的に支援するシステムの構築を図るもので,
基盤技術の育成・産業技術としての成立性見極めを目的としたものである.
心疾患に対する低侵襲治療としては,血管狭窄に対するカテーテルインターベン ションなどが行われているが,これを支援するシステムの研究開発は概ね未開拓の 分野であると言える.国内の関連研究開発動向は以下の通りである.
・循環器系臓器の手術作業支援を中心とした手術支援システムの研究例は見られな い.腹腔内視鏡手術に関しては東大土肥研のラパロマニピュレータ(マスタ・ス
レーブ)やオリンパス光学のRES(robotic endo-surgery)システムが発表されてい る.いずれも動物実験のレベルである.
・画像処理および画像情報統合・提示では,東京女子医大の伊関講師らによる
HiVisCAS が提唱されている.また,日立・東芝・NHK-ES の脳腫瘍等手術支援
システムの委託研究などがある.これらは脳神経手術のためのシステムであり,
さまざまな計測モダリティを利用可能な構成になっている.しかしながら画像情 報はおおむね術前に計測撮像されたものであり,当該事業における目標仕様であ る,術中撮像画像による画像情報の更新は想定していない.
海外の関連研究開発動向は以下の通りである.
・ 画像処理システムとしては,National University of Singapore(Singapore) T.Poston/ Institut Albert Bonnoit(France) I.Bricault/(IBM,USA)等で研究が進められてい る.
・ 操作支援システムとしては米国Intuitive Surgical社,Computer Motion Inc.社によ る,内視鏡映像を見ながら手術操作を行うマスタスレーブシステムがある.これ らは当該事業の目標仕様にあるようないかなるモダリティによる術中計測も行 っていない.
・手術支援システムとしては,JHU(USA,R.Taylor et al.)・TIMC-IMAG(France,
S.Lavallee et al.)・CMU(USA,T.Kanade et al.)・SRI International(USA,P.S.Green et al.)・Politechnico de Milano(Italy,A.Rovetta et al.) などで研究が進められている.
いずれも作業支援を主眼にしている.主な計測モダリティはX線CTである.当 該事業の目標仕様に示すような術中の撮像は想定していない.対象部位は腹腔・
泌尿器・骨や関節など,呼吸や搏動による変形・移動のない組織である.
・開放型 MRI を利用して画像支援を中心とした手術支援システムを構築し,実験 を行った例としてBrigham and Women's Hospital(USA)のものがある.これはMRI による断面画像(二次元)を数秒〜数十秒の周期で更新・提示するものである.手 術作業自体は医師の手が直接行っており,操作に関する支援は行われていない.
血管吻合に関しては内外の医療機器メーカから比較的太い血管用のものが開発 されている.しかしながら当該事業の目標仕様に示している,冠動脈バイパス手術 において扱われる直径 1[mm]程度の非常に細い血管を扱うことの可能な吻合器等 の手術器具は見られない.また MRI の磁場中での使用を想定して開発されたもの はない.
2.3省エネ効果の試算
(1)省エネ概要
従来の手術は大規模な切開手術(心臓も停止させる)を必要としていたが、本システムを用 いることにより切開部分を最小限に抑えるとともに、心臓を停止させず、かつ、手術時間及び 集中治療室収容時間の大幅な短縮が図られる。このことにより、1手術当たりの消費電力も大 幅に低減することができる
(2)省エネ効果の算出根拠
従来の手術手法(執刀医による手作業)における手術時間は10時間、術後の集中治療室の 収容時間は48時間であるのに対して、本システムによる手術では手術時間は5時間、術後の 集中治療室の収容時間は24時間とそれぞれ1/2の時間に短縮される。これに対して、手術 に使用する装置等の時間当たり電力消費量は双方とも20KWと同じである。また、集中治療 室の時間当たり電力消費量は15KWである。よって、従来の手術手法に対して、1/2の省
エネ効果となる。
・2010年における本装置の想定導入台数:80台
(本格的な心臓バイパス手術を行える病院は100〜200病院程度であることから、少なく とも80台は導入されるものと推測する。)
・1手術当たりの年間節約電力消費量:460KWH
(20KW×(10H-5H)+15KW×(48H-24H)=460KWH)
・年間手術件数:27,000件
(心臓のバイパス手術を必要とする入院患者は約34千人(99年)であることから、少なくとも その8割の27千人が手術していると推測される。本システムが実用化されれば、8割の比率 は10割に近づくと考えられるが、本試算では27千件を採用。)
・年間消費電力量
2010 年:460KWH×27,000件=12,420,000KWH
2020 年:460KWH×30,000件=13,800,000KWH
2030 年:460KWH×34,000件=15,640,000KWH
・原油換算
2010 年:12,420,000KWH×9.29729×10-5=1,155KL 2020 年:13,800,000KWH×9.29729×10-5=1,283KL 2030 年:15,640,000KWH×9.29729×10-5=1,454KL
3 .事業の目標
(1)事業の全体目標(値)
目標とするシステムは、術中 MRI モニタリング下で心疾患に対する診断・治療 を支援するシステムである.特に,術中 MRI モニタリング下で動作する操作マニ ピュレータシステムによる,主に低侵襲冠動脈バイパス手術(minimally invasive direct coronary artery bypass; 以下MIDCAB)を対象とした低侵襲な診断治療統 合支援システムを開発する.このシステムは大きく2つの部分に分けられる.執刀 医の巧みな手術操作(手技)を体腔内の狭い空間まで伝達する手術操作支援と,内視 鏡や各種計測機器から得られる映像・画像を総合的に提示する画像情報支援である.
治療操作支援に関しては,操作入力部から入力された操作をマニピュレータがほ ぼ時間遅れなく正確に再現することで執刀医の手技を正確に伝達する,高性能な操 作マニピュレータシステムを開発する.対象臓器の形状変化に対しては,各種セン サ等を併用してこれを検出し,作業点と術具先端との相対的位置姿勢関係がつねに 作業に適当なものになるようにマニピュレータを制御する技術を開発する.また操 作マニピュレータシステムの機構部分は,MRI との相互干渉のないよう,磁場に 対して低感度な駆動原理・構成要素部品を利用して製作する.
操作マニピュレータシステムは操作入力装置とスレーブマニピュレータからな る.スレーブマニピュレータは,外径が15[mm]φ以下,到達可能範囲は操作部が 心臓表面の任意の位置に到達可能なこと,ある位置に到達可能なように初期設定さ れた場合の作業範囲はその位置を含む直径50[mm]の半球内部であること,操作入 力装置の指令からスレーブマニピュレータの各関節動作開始までの応答遅れは約
33[ms]以内であること,支持荷重と位置分解能に関しては,荷重支持優先の場合
支持荷重 3[kg]以上,位置分解能 0.5[mm]以下とし,精密さ・器用さ優先の場合,
支持荷重0.5[kg]以上,位置分解能0.1[mm]以下とすること,かつMRIの磁場中で 動作可能なことが要求される.
画像情報支援に関しては,手術室中に設置した MRI とその中で動作する内視鏡 を基盤として、MRI 環境下で動作する超音波スキャナを開発し、これらの計測装 置より得られる映像・画像情報を総合し、治療中に逐次更新提示する術中情報支援 システムを開発する.
上述の各システム・技術は前項の各要素技術開発の内容に対応しており,それら をまとめることによってトータルシステムの構築を行う.
構築されたシステムのもとでは,模型等を用いた模擬手術への適用試験,実験用 生体組織を用いた適用試験を行う.また,広く医師に試用していただき意見を求め,
開発に反映させてゆく.
(2)目標選定の理由
前項に示す目標指標に適うシステムを構築することによって,虚血性心疾患を始 めとする心疾患全般に対する診断・治療を統合的に行うことが可能になる.またこ こで開発された技術は,当該システムを他の臓器・器官に対する体腔内全般の診 断・治療にも適用展開してゆくための基盤システム技術となる.
低侵襲手術を実現するためには,手や指の機能を狭隘な空間で実現する操作マニ ピュレータが必須であり,これの操作を入力する装置や制御装置,その他,治療作 業を支援する機器の開発を行う必要がある.本システムは操作入力装置とスレーブ マニピュレータからなる.スレーブマニピュレータは、以下の仕様を目標とする.
また、その選定理由を併記する.
・外径:15[mm]φ以下
---肋骨のすき間から低侵襲で進入するための最大の太さと考える.
・到達可能範囲:操作部が,心臓表面の任意の位置に到達可能とすること.
---背側面など心臓表面の任意位置への到達は MIDCABに必要な機能である.
・ある位置に到達可能なように初期設定された場合の作業範囲:その位置を含む直 径50[mm]の半球内部
---MIDCABの各種手技のうち,もっとも広い作業範囲を要する,吻合・縫合
時の針糸の取り回しに必要な作業範囲である.その場合,操作部が対象患部表面 より内部に行くことはないので半球となる.
・操作入力装置の指令からスレーブマニピュレータの各関節動作開始までの応答 遅れ:約33[ms]以内
---TV レート(1 秒間に 30 フレーム)の表示映像を見ながらの作業であり,操
作者に違和感を生じさせないためには1フレーム以内の時間でスレーブ側が動作 を開始することが必要である.
・支持荷重と位置分解能:荷重支持優先の操作を行うものでは,支持荷重 3[kg]以 上,位置分解能0.5[mm]以下.
---心臓や大血管等,あるいは各種術具を支持・保持するのに必要な仕様であ る.
・精密さ・器用さ優先の操作を行うものでは,支持荷重 0.5[kg]以上,位置分解能 0.1[mm]以下.
---組織の縫合,血管の吻合などに必要な支持荷重と位置分解能である.
MRI・超音波スキャナの併用については次のように考える.本プロジェクトは主 に虚血性心疾患を対象にしている.MRI は任意方向からの撮像が可能であり,そ の画像は心臓全体の解剖学的構造の把握を助けるが,冠状動脈,特に分岐した後の
小血管(直径 1〜2[mm]程度の細いもの)を目視で区別できるように描画することは,
以下のような理由により現在のところ困難とされている.
・通常,冠状動脈は脂肪に埋もれており,これをMRIで撮像した場合,脂肪と冠 状動脈が両方とも高信号(明るい部分)となり,見分けが難しい.
・一般に,MRIの分解能は細い冠状動脈を鮮明に描画できるほどには高くない.
一方,超音波スキャナは心臓血管系疾患の手術に従来から用いられており,特に 触診用のものは狭い範囲内での分解能は高く,細い冠状動脈の描画も可能であるが,
全体的な解剖学的構造の把握には不向きである.
このように、MRI と超音波スキャナにはそれぞれ得失があり,これらを相補的 に用いることでそれぞれの特長を生かした情報提示することが可能になる.
さらに,MRI と超音波の画像獲得レートの問題がある.本プロジェクトでは主 に画質の関係からMRIの撮像シーケンスとしてスピンエコー(SE)とグラディエン トエコー(GE)を想定している.これらのシーケンスを使用した場合,数秒に 1 枚
〜1 秒に 1枚程度の割合で MRI の画像が得られる.一方、超音波スキャナの二次 元断層画像はほぼリアルタイムで得られ,MRI から得られる間欠的な画像情報を 補間するために利用することができる.
また,本プロジェクトでの使用を想定している開放型 MRI は静磁場強度が
0.3[T]と低いため,心筋の回復度を反映する血流等の情報(機能情報)を得ることが
できない.この血流等を超音波スキャナで計測し,MRI画像から得られる形態(解 剖学的)情報に超音波スキャナで得られた機能情報を追加し統合的に提示すること によって,診断・治療において非常に有用な情報を提供することができる.
以上の理由から,MRI撮像中に超音波を併用する必要性があると考えている.
これに関連して,MR画像と超音波の画像の同時処理については,次のように考 えている.MRIにより獲得される間欠的データ(数秒に1枚〜1秒に1枚程度)と超 音波スキャナのリアルタイムデータ(1 秒に数枚〜数十枚)を統合的に処理・提示す ることは,まさに委託研究として画像処理技術に求められている技術課題であると 考える.つまり,術中において MRI・超音波両者の相互補完的な画像情報の座標 を統一し,統合的な情報提示を行うことにより,術者に対して効果的なナビゲーシ ョンを実現できると予想される.この技術課題を解決することにより,間欠的に取
得したデータと連続データを効果的に提示する術中診断画像情報提示の新しい手 法が確立する.
以上の理由から,MRI 画像と超音波の画像を同時に画像処理する必然性がある と考える.
4 .事業の計画内容
4.1 事業全体,個別研究開発項目の計画内容
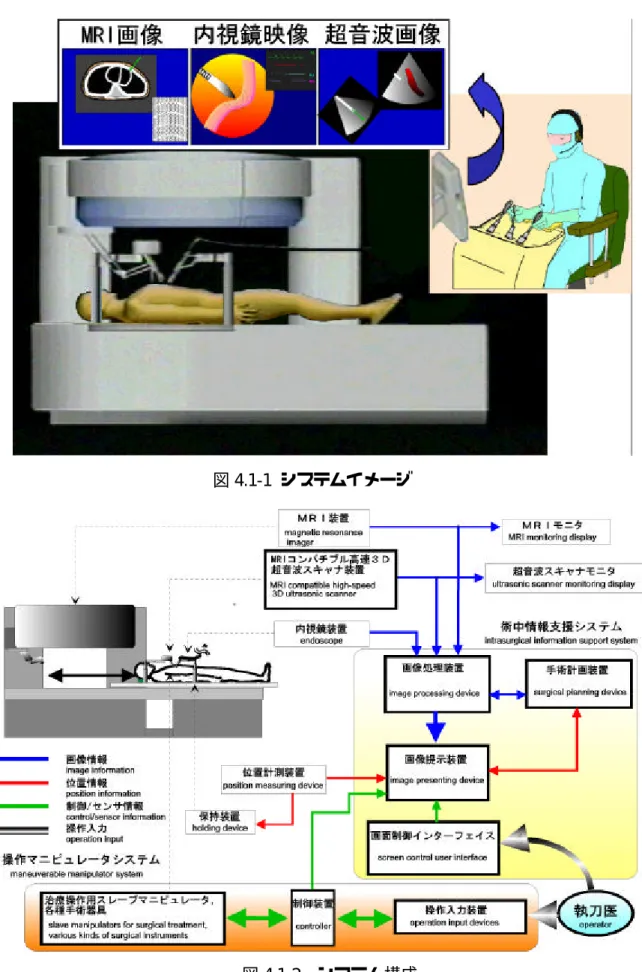
当該事業の開発項目は,大きく 2 つに分けられる.執刀医の巧みな手術操作(手 技)を体腔内の狭い空間まで伝達する手術操作支援と,内視鏡や各種計測機器から 得られる映像・画像を総合的に提示する画像情報支援である.これらは,治療に必 要な創部(傷口)をより小さくするとともに執刀医の治療行為をより円滑にし,所要 時間を短縮するという,低侵襲な心疾患治療を可能とするためには不可欠なもので
ある.図4.1-1にシステムイメージを示す.また図4.1-2にシステム構成を示す.
当該事業において開発されるシステムは,術中 MRI モニタリング下で主に虚血
性心疾患に対する診断・治療を支援するシステムである.このシステムは,内視鏡・
MRI・超音波スキャナを手術室に導入し,これらより得られる映像・画像情報を総 合し治療中には逐次更新提示する.更新の周期はモダリティによって異なるが,速 いもので数十ミリ秒〜遅いものでは数十秒程度のオーダの周期である.これにより 執刀医および助手等に対する術中の画像情報支援を行う.
手術操作支援に関しては,操作入力部から入力された操作をマニピュレータがほ ぼ時間遅れなく正確に再現するいわゆるマスタスレーブ方式を適用することによ り,執刀医の手技を正確に伝達する高性能な操作マニピュレータシステムを実現す る.治療が進行するにつれて往々にして生じる対象臓器の形状変化に対しては,画 像処理と近接距離センサ,接触センサ等を併用してこれを検出し,作業点と術具先 端との相対的位置姿勢関係がつねに作業に適当なものになるようにスレーブマニ ピュレータを制御する.また操作マニピュレータシステムの機構部分は,MRI の 磁場中で計測画像に歪などの影響を及ぼしたりせずかつ磁場に起因する干渉力を 受けることのないよう,磁場に対して低感度な駆動原理・構成要素部品たとえば超 音波モータやセラミックス,エンジニアリングプラスティック等を利用して製作さ れる.
図4.1-1 システムイメージ
図4.1-2 システム構成
以下に各要素項目の計画内容を示す.
○操作マニピュレータシステムによる手術作業支援技術
操作マニピュレータシステムによる,主に低侵襲冠動脈バイパス手術(minimally invasive direct coronary artery bypass; 以下MIDCAB)を対象とした低侵襲な手術作業 支援技術を開発する.本システムは操作入力装置(マスタ)とスレーブマニピュレー タからなる.MR適合性と,吻合等操作を実現可能な高い手技伝達性能を両立した 操作マニピュレータシステムは過去に例を見ない画期的なものであり,かつ開放型 MRIの出現とその性能向上に伴い急速に期待が高まっている「診断(撮像)と治療の 統合化」を実現するために必須の技術である.
○形状変化補償技術
手術の進行に伴って生じる対象部位の形状変化(変形・位置ずれ等)に対して,内視 鏡視野との協調を取りつつスレーブマニピュレータ等の手術操作手段の位置姿勢 を修正・補償する技術の開発を行う.MR適合性と対象臓器の愛護的形状変化補償 を両立した例は過去に例を見ない画期的なものであり,かつ前項の操作マニピュレ ータシステムによる手術作業支援を実現するために必要な技術である.
○MRIコンパチブル高速3D超音波計測技術
MRI の磁場中で,臓器内部を局所的に,高速で三次元計測できる超音波スキャナ の開発を行う.MR適合性と,三次元超音波計測を両立した例は過去になく,きわ めて新規性・独創性の高い技術である.
○画像処理技術
MRI や超音波スキャナなどから得られる,いろいろな位置からの部分的な画像デ ータを集合させ,医師らが理解しやすい形で提示する.また,それらの画像から対 象部位や術具の抽出などを行う,操作マニピュレータシステムによる手術作業支援 に適した画像処理技術を開発する.
○手術計画・術中情報提示技術
術前の手術計画や術中内視鏡映像,三次元投影した画像などの提示を行う技術を 開発する.
心臓手術では,心停止下・体外循環での手術の場合には心臓の変形が非常に大き く(血液が行かないため,平らになったりする),また心拍動下の場合には拍動によ る動きが存在する.手術計画には,対象部位の形状や,病変部の位置といった情報 が必要であり,心臓のように,術中での形状変化の著しい臓器,あるいは動きの激 しい臓器に対する手術計画は従来手法では難しい.そのため心疾患における手術計
ある.また,MRI 下で心臓手術をするためには,狭隘空間での手術操作が必要で あり,MR適合性(MRIの画像に影響を及ぼさない性質)を有し且つ微細操作が可能 なマニピュレータと組み合わせて開発した前例はない.患者にとって低侵襲な手術 と術者の負担低減を実現するためには,術中に対象臓器のモニタリングをする環境 が必要であるが,その際にX線の被曝なしに撮像できるMRIが最適である.現在,
MR で観察しながら生検を行う研究例(東京慈恵医大)なども報告されてきており,
今後さらに心臓手術に対しても MRI 下での手術計画を行うことが一般的になるこ とが予想される.
○術中微細操作支援技術
スレーブマニピュレータ先端に装着し,心疾患治療における微細操作に使用可能な 術具開発を行う.MR適合性を有し,かつ吻合等の微細操作を支援する術具の開発 例はない.また最終的には新規な吻合・縫合等の方式を開発することを検討してお り,術式自体に変化を齎す可能性を有している画期的な要素研究である.
要素技術の相互関係を下図に示す.
図4.1‑3 要素技術の相互関係
◎年度別予算金額(単位:百万円,太字は認可もしくは内示金額) 平成13年10月現在 H11fy H12fy H13fy H14fy H15fy 合計
1)当該事業受託提案時(H11.4) 45 264 166 132 93 699
44 124 339
2)H12年度概算要求(H11.5)
内示 提案 提案予定
44 119 460
3)H13年度概算要求(H12.5)
H11節約後 内示 提案
44 114 123
4)H13年度内示時点(H13.4)
H12節約後 内示
44 114 119
5)事業原簿作成時点(H13.10)
H13節約前
操作マニピュ レータシステ ムによる手術 作業支援技術
形状変化補償 技術
MRI コ ン パ チ ブ ル 高 速 3D 超音波計 測技術
画像処理技術 手術計画・術中情 報提示技術
術中微細操作 支援技術
心疾患診断・治療統合支援システム (トータルシステム)
要素技術の開発スケジュールを下表に示す.
平成11年度 平成12年度 平 成 13年 度 平成14年度 平成15年度
1.要素技術の開発
①
②
③
④
⑤
⑥
2.トータルシステムの開発
3.運営管理
1)当該事業受託提案時(H11.4) 4 5 264 166 132 93
2)H12年度概算要求(H11.5) 44 124 339
3)H13年度概算要求(H12.5) 44 1 1 9 460
4)H13年度内示時点(H13.4) 44 1 1 4 123
手 術 計 画 ・術中情報 提示技術 操作マニピュレータ システムによる手術 作 業 支 援 技 術 形 状 変 化 補 償 技 術
MRIコンパチブル高速 3D超音波計測技術
画 像 処 理 技 術
術 中 微 細 操 作 支援技術
概 念 設
ソフトウェ ア基本部
品作成 概 念 設 計 / 基 本 設 計
基 本 設 計
基 本 設 計 基 本 設 計
基 本 設 計 基 本 設 計
要 素 試 作
要 素 試 作
要 素 試 作 要 素 試 作
要 素 試 作
要 素 試 作
システム対応試作 評 価 ・システム まとめ
基 本 設 計
トータルシス テムまとめ 概 念 設 計
概 念 設
概 念 設
概 念 設
概 念 設
システム対応試作
システム対応試作
システム対応試作
システム対応試作
システム対応試作
結 合 要 素 設 計
評 価 ・システム まとめ
評 価 ・システム まとめ
評 価 ・システム まとめ
評 価 ・システム まとめ
評 価 ・システム まとめ
表4.1-1 開発スケジュール
◎予算に関わる当初計画からの変更点 1)から2)への変更
当初計画では,平成 12年度にシステムの主モダリティとなる MRI装置を購入
予定(開放型,静磁場強度0.3[T])であったが,開発委員会において要望された心 機能計測に関する検討を行うためには静磁場強度が不足していた.そのため平成 13 年度中頃日立メディコにより市場投入予定とされる静磁場強度0.7[T]の MRI装 置の開発を待つこととし,装置導入費用を13年度に移し各年度の予算を修正した.
0.7[T]のMRI装置の本体価格は0.3[T]より高額である.また電磁界強度が0.3[T]MRI より高いため必要なルームシールド等に関してより多くの設置費用が必要である.
そのため導入費用自体も増額している.
2)から3)への変更
◇H12fy分:124M¥→119M¥
内示金額からNEDO費用分および節約分等を差し引いた額である.
◇H13fy分:339M¥→460M¥
1)および2)の時点では米国Intuitive Surgical社の手による手術用操作マニピュレ ータシステムda Vinciは世の中に知られておらず,開発計画は自ずとこれを考慮し
たものにはなり得なかった.しかしながらその後発表されたda Vinciの評判は高く,
過去数回行われた開発委員会でも,高本委員長をはじめ臨床サイドの委員の先生方 が,心疾患における従来術式の踏襲が可能であり,しかも手術時の操作を人の手と 同様に器用かつ高精度に行うことのできるという点でda Vinciの使い心地を高く評 価する発言をされた.このことにより当該事業の開発委員会ではこれと性能的に同 等なものの開発を大いに期待するようになった.即ちここにおいて世界レベルを凌 駕せんとするナショナルプロジェクトの位置付けが変化したものである.これに対 してまずH13に第一次試作としてda Vinci相当かつMRI下可動のシステムの開発 が必須となり,全体計画の部分的修正が必要となったが,この修正のためには操作 マニピュレータシステム他の開発費を増額する必要がある.
また H13年度中頃に導入予定の開放型MRIに関しては,当初計画に対してGE システムでは不可能なシーケンス制御・傾斜磁場制御を追加することで購入見積価 格が上昇した.これはGEシステムの公表価格に比べて十分妥当な数字である.
一方,提案書の時点では明記されていなかった MRI の使途については過去数回
の開発委員会でも度々議論されてきた.委員の先生方からは特に MRI によるナビ ゲーションや心機能計測(定性的なレベルで可)などの開発を求めるご意見・ご要望 を戴いてきた.3)の時点ではそういった声に対応するために,MRIによるマニピュ レータトラッキング機能の付与,および心機能計測の基礎検討を行うために必要な 項目の費用を計上している.さらにこの基礎検討のため,および H13 中頃に開放 型 MRIが導入されるまでの MRコンパチビリティに関する要素試験などの用途に 向けて,H11年度終了のNEDO プロジェクト「超高速/高精度脳機能計測MRIシ ステム」で使用した,静磁場強度1.5[T]のMRI(開放型ではない)を利活用すること とし,そのための保守費用を計上した.
その他,術中情報提示技術開発に際してのソフトウェア開発費の上昇・術具開発 における材料費・加工費等の上昇により,若干の増額となった.
[参考:da Vinciと当該プロジェクト開発機との比較]
da Vinciは数値的仕様を公開していないため,これとの数値的比較は困難である.
当該プロジェクトでは,同じ作業を同等の操作性で行えることを目指す.その場合,
MRI下で動作するマニピュレータを材料等の厳しい制約のもとで開発するために,
駆動機構の発する磁場や電磁波が MRI の画像に影響を与えない方式の開発,また MRI の磁場や撮像時の電磁波が駆動機構の動作やセンサ・制御系に影響を受けな いシステム構成などを開発することが必要である。ただし、基本計画の記述の範囲 内では特に変更することなく対応可能と考える.
当該プロジェクトでの開発機の特長は「da Vinci と同等の操作性を有し,かつ MRI下で動作可能」という点である.ただし操作性が同等であるとは,「結果とし て同じ作業が同じようにできること」であり,外科医によるユーザ評価を行う予定 である.比較については下表1〜4をご参照いただきたい.da Vinciに関する部分は
公開されている限りの情報,および発表された映像を元に独自に分析を試みたもの (「推定」と記す)である.
表 1 装置の全体構成比較
da Vinci™ 当該プロジェクト
マニピュレ ータ
(詳細:表2)
3 本のアームが一組でアームカー トに取り付けられている
任意本数のアームを任意配置可能 (MRI下で動作可能)
術具部
(詳細:表3)
術具を含めた細長い先端部が交換
可能 術具が交換可能
術中情報提 示部
(詳細:表4)
内視鏡映像を立体視するビューア
(コンソールに装備) 内視鏡映像の映像に加えて MRI,超
音波画像を切り替えながら観察でき るディスプレイ(コンソールに装備)
表 2 マニピュレータの主な仕様比較
装置 項目 da Vinci™ 当該プロジェクト
数 3本(術具用2本,内視鏡用1 本)
任意(標準3本.構成は左と同様)
構成 上記3本が一式となっている 1本ごとに独立 (状況に合わせて本数 を変更可能)
自由度 4自由度(EndoWrist™の並進 2方向,回転,ピボット動作)
6自由度(術具取付け部分において,
位置3自由度,姿勢3自由度)
動作速度 (推定)30[mm/s]以上(最大速度 は未確認)
最大100[mm/s]
マニ ピュ レー タ
MR 適合性 なし あり
表 3 術具部の主な仕様比較 装
置 項目 da Vinci™ 当該プロジェクト
術具の種類
7種類 基本 3種類(2001年度末プロトタイ プ完成予定)他に術具の複合機能化 を検討中
滅菌
可能(エチレン・オキサイド ガス滅菌:以下E.O.G滅菌と 記す)
可能(オートクレーブおよび E.O.G 滅菌へ対応予定)
術具の太さ 直径約10[mm] 直径5[mm]
自由度 3自由度+開閉 2自由度+開閉 再使用可能
な回数
10回(10回未満でもワイヤ切 れの報告例あり)
最低10回以上 術
具 部
MR 適合性 なし あり
合計自由度 7自由度+開閉 8自由度+開閉
使 用 環 境 に よ る 機構的特徴
経皮的操作を容易にする ピボットモーション機構
・モータを根元に集中し,長いアー ムと屈曲する先端部で機構を構成 (MR画像への影響低減,MR磁場・電 磁波からの影響回避)
表 4 術中情報提示部の主な仕様
項目 da Vinci™ 当該プロジェクト
立体視の 方式
左右映像を別々に覗かせる方式 立体視用眼鏡を使用.
視野移動 可能.マスタで操作 可能
移動方式 機械式 機械式+画像処理による見回し 斜視角度
の変更方 式
機械的な交換.
斜視角度0[deg],30[deg]の内視鏡を
取り替える.
広角内視鏡の映像を補正処理すること による観察範囲変更.内視鏡交換不要.
術中情報 内視鏡映像のみ 内視鏡映像,MRI 画像,超音波画像な どを利用可能
術中情報 提示(内視 鏡映像以
外)
術具の着脱状態などの情報が内視 鏡画面上に表示される.(推定) その他詳細不明
座標統合,MR画像・超音波画像情報提 示,術具位置追跡によるナビゲーション 情報提示,各種バイタルサイン表示
3)から4)への変更
◇H12fy分:119M¥→114M¥
H12年11月の節約による.
◇H13fy分:460M¥→123M¥
1)→2)→3)の経緯に沿ったH13年度概算要求時の提案に対しての回答金額は1)の
当該事業受託提案時の約 6 割,すなわち 99.6M¥であった.その後の復活折衝の 結果上記金額まで戻したが,前記概算要求時の提案内容を実施できる額ではない ため,H13年3月6日開発委員会の席上で以下を提案し,承認を得た.
・各要素技術の開発に関しては,H13fy の計画を第一次試作(トータルシステムと しての結合を行う)から要素試作(結合を想定して各開発要素を試作するのみ)へ 変更,H14fy,H15fyをそれぞれシステム対応試作,評価/システムまとめと変 更する(前掲の線表に反映).同様にトータルシステムの開発においては H13−
H14fyで行う計画だった基本設計を H14fyのみとし,H13fyでは結合要素設計を
行うことに変更する.
・本プロジェクトではMRIを購入しない.
・システム評価の際には 0.7[T]ではなく 0.3[T]のオープン MRI(日立メディコ製 AIRIS IIを想定)を用いる.
・場所はME連携ラボ(東京女子医大脳神経センタ内)を想定している.左記のサイ トは実際の手術室として稼動しているため,滅菌等運用上の理由から動物実験
はできない.そのため最終評価はファントムを用いて行う.
・perfusion検出などに基づいたいわゆる機能計測は0.3[T]では全く実施不可能.超 音波との複合でトラッキングを行うことに代える.
・心拍動の影響とそれに対応する機能はポンプ駆動の模擬心臓を利用し,加えて生 体組織による予備実験の結果を外挿することで検討・評価を行う.
・このプロジェクトでは0.3[T]での評価結果を0.7[T]MRI環境に外挿できるように 検討する.
・もし今後の状況変化が許せば0.7[T]での評価も検討する.ただし現時点ではプロ ジェクト終了時までに日本での0.7[T]開放型MRIの導入予定はない.
[参考:開放型/非開放型MRIの相違とそれによる研究内容の差]
開放型MRIと非開放型MRIの主な違いを以下に示す.
日立メディコ製 MRIの 2機種を比較する.なお他社製品においてもこの分類から 大きく外れたものはない.
比較項目 開放型(AIRIS II) 非開放型(STRATIS II) 静磁場強度 低磁場(0.3[T]) 高磁場(1.5[T])
ガントリ(患者 が入る部分)の 構造
40[cm]前後の間隔を開けて 2 枚
の円盤(直径 1.5[m]程度)を重ね
たような構造
円筒状(大人が入れる程度の直 径のトンネルで,奥行2[m]程度)
撮像領域への アプローチ
ほぼ全周からのアプローチが可 能.
トンネル両端の開口部からの み.
典 型 的 な 装 置 の外観
(左:AIRIS II 右:STRATIS II)
非開放型 MRI を使用した場合は,撮像領域にある患部へのアプローチが悪く,
外からアプローチができるのは人体の端の部分である頭や足に限られる.
それに対して開放型の場合は全身に対するアプローチが可能になり,当該プロジ ェクトで対象としている,特に微細な操作を要する心臓血管手術においてもマニピ ュレータによる支援が可能になる.
4)から5)への変更
◇H13fy分:123M¥→119M¥
H13fyにおける実際の契約金額である.なお平成13年10月時点で節約指令は出て
いない.
○当該事業の独創性,新規性,先進性
当該事業は開放型 MRI による撮像を行うことによって術中に時々刻々変化する
対象臓器・器官の全体的構造を把握しながら,MRI 環境下にあるマニピュレータ により、治療処理が可能であるという、独創性と先進性を持っている。MR画像に よってマニピュレータの先端術具位置検出を行い,治療対象と治療手段との相対的 な位置を示しなかせら,患者は MRI から出し入れされることなく,術者はこの患 者に対して,前記のマニピュレータおよび先端術具を介して術者の手技を正確に伝 達可能であるシステム形態はまったく新しいものである。MR適合性を有するマニ ピュレータ、MR画像の情報を時間的・空間的に補完するためにMR適合性を有す る超音波プローブに関しても先進性を有している。
4.2 研究開発項目毎の内容の詳細 4.2.1 目標指標
1)操作マニピュレータシステムによる手術作業支援技術
操作マニピュレータシステムによる,主に低侵襲冠動脈バイパス手術(minimally invasive direct coronary artery bypass; 以下 MIDCAB)を対象とした低侵襲な手 術作業支援技術を開発する.本システムは操作入力装置とスレーブマニピュレータ からなる.スレーブマニピュレータは以下の仕様を目標とする.
・ 外径:15[mm]φ以下
・到達可能範囲:操作部が,心臓表面の任意の位置に到達可能なこと.
・ある位置に到達可能なように初期設定された場合の作業範囲:その位置を含む直 径 50[mm]の半球内部
‑‑‑‑‑‑‑‑MIDCAB の各種手技のうち,もっとも広い作業範囲を要する,吻合・縫合 時の針糸の取り回しに必要な作業範囲である.その場合,操作部が対象患部表面 より内部に行くことはないので半球となる.
・操作入力装置の指令からスレーブマニピュレータの各関節動作開始までの応答 遅れ:約 33[ms]以内
‑‑‑‑‑‑‑‑TV レート(1 秒間に 30 フレーム)の表示映像を見ながらの作業であり,
操作者に違和感を生じさせないためには 1 フレーム以内の時間でスレーブ側が動 作を開始することが必要である.
・支持荷重と位置分解能:
-荷重支持優先の操作を行うものは,支持荷重3[kg]以上,位置分解能0.5[mm]以下.
-精密さ・器用さ優先の操作を行うものは,支持荷重0.5[kg]以上,位置分解能0.1[mm]
以下.
・MRIの磁場中で動作可能なこと.
2)形状変化補償技術
手術の進行に伴って生じる対象部位の形状変化(変形・位置ずれ等)に対して,内 視鏡視野との協調を取りつつスレーブマニピュレータ等の手術操作手段の位置姿 勢を修正・補償する技術の開発を行う.
・ 補償指令遅れ:約33[ms]
・補償誤差:0.5[mm]以下
3)MRIコンパチブル高速3D超音波計測技術
MRI の磁場中で,臓器内部を局所的に,高速で三次元計測できる超音波スキャ ナの開発を行う.
・ 画像データ獲得所要時間:3[s]以下
・ スキャンボリウム:底面5[cm] x5[cm],深度5[cm]以上
・ピクセルサイズ:0.5[mm]以下 4)画像処理技術
MRIや超音波スキャナなどから得られる,いろいろな位置からの部分的な画像デ ータを集合させ,医師らが理解しやすい形で提示する.また,それらの画像から対 象部位や術具の抽出などを行う,操作マニピュレータシステムによる手術作業支援 に適した画像処理技術を開発する.
・画像処理時間*:4[s]以下 (*注:各画像計測装置の計測時間は含まない.)
・位置情報精度:1[mm]以下
・心電図波形や血圧などのモニタを行うプローブに関しては MRI の磁場中で用い ることが可能であること.
5)手術計画・術中情報提示技術
術前の手術計画や術中内視鏡画像,三次元投影した画像などの提示を行う技術を 開発する.
・ ユーザフレンドリーなインターフェース機能により表示画像の切り替えが可能 なこと.
・前項の画像や各種センサ情報を表示可能なこと.
6)術中微細操作支援技術
スレーブマニピュレータ先端に装着し,心疾患治療における微細操作に使用可能な 術具開発を行う.
・MIDCAB中の微細操作に適用できること.
・心疾患治療に必要な手技に適用できること.例えば血管吻合,血流遮断,切除等.
・MRI環境下で使用可能であること.
1)操作マニピュレータシステムによる手術作業支援技術
低侵襲手術を実現するためには,手や指の機能を狭隘な空間で実現する操作マニ ピュレータが必須であり,これの操作を入力する装置や制御装置,その他,治療作 業を支援する機器の開発を行う必要がある.
前述のように本システムは操作入力装置とスレーブマニピュレータからなる.スレ ーブマニピュレータは以下の仕様を目標とする.
・外径:15[mm]φ以下
---肋骨のすき間から低侵襲で進入するための最大の太さと考える.
・到達可能範囲:操作部が,心臓表面の任意の位置に到達可能とすること.
---背側面など心臓表面の任意位置への到達はMIDCABに必要な機能である。
・ある位置に到達可能なように初期設定された場合の作業範囲:その位置を含む直 径50[mm]の半球内部
---MIDCABの各種手技のうち,もっとも広い作業範囲を要する,吻合・縫合
時の針糸の取り回しに必要な作業範囲である.その場合,操作部が対象患部表面 より内部に行くことはないので半球となる.
・操作入力装置の指令からスレーブマニピュレータの各関節動作開始までの応答 遅れ:約33[ms]以内
---TV レート(1 秒間に 30 フレーム)の表示映像を見ながらの作業であり,操
作者に違和感を生じさせないためには 1 フレーム以内の時間でスレーブ側が動 作を開始することが必要である.
・支持荷重と位置分解能:
-荷重支持優先の操作を行うものでは,支持荷重 3[kg]以上,位置分解能 0.5[mm]以
下.
---心臓や大血管等,あるいは各種術具を支持・保持するのに必要な仕様であ る.
-精密さ・器用さ優先の操作を行うものでは,支持荷重 0.5[kg]以上,位置分解能
0.1[mm]以下.
---組織の縫合,血管の吻合などに必要な支持荷重と位置分解能である.
2)形状変化補償技術
・補償指令遅れ:約33[ms]
---臓器の形状変化に対する補償指令遅れで,内視鏡からの映像を参照しなが
らの操作において違和感のない値である.
・補償誤差:0.5[mm]以下
---上記と同様に,操作で支障をきたさない値である.
基本的には吸着によって心筋表面の狭い範囲(数 cm四方)の動きを局所的に拘束
する方式である.その際に心臓全体の拍動が止まるわけではなく,動きを拘束され るのは心筋表面のごく狭い手術作業対象領域である.この方法は近年普及しつつあ る心拍動下心臓手術に適用されており,既存の吸着式スタビライザと同等の補償を