宇宙航空研究開発機構研究開発報告
JAXA Research and Development Report
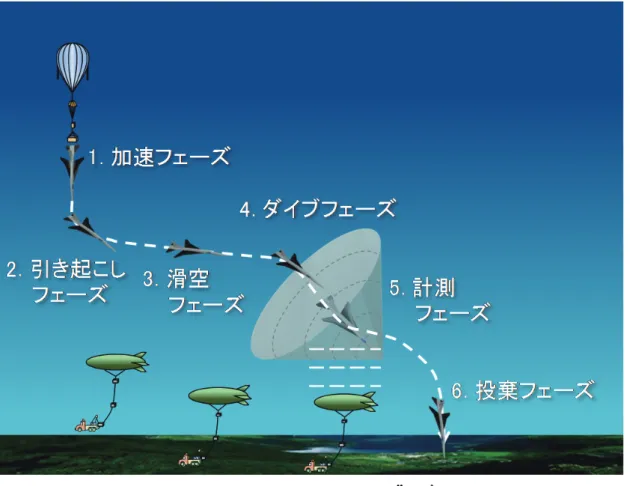
低ソニックブーム設計概念実証フェーズ2(D-SEND#2)
飛行シミュレーションモデル
Report on the Flight Simulation Model of Flight Demonstration of Low Sonic
Boom Design Concept Phase II (D-SEND#2)
川口 純一郎,鈴木 広一,二宮 哲次郎,冨田 博史
Jun’ichiro Kawaguchi, Hirokazu Suzuki, Tetsujiro Ninomiya and Hiroshi Tomita
2018年1月
宇宙航空研究開発機構
Japan Aerospace Exploration Agency
川口純一郎
*1
,鈴木広一
*2
,二宮哲次郎
*1
,冨田博史
*1
Report on the Flight Simulation Model of Flight Demonstration of Low
Sonic Boom Design Concept Phase II (D-SEND#2)
Jun’ichiro Kawaguchi
*1
, Hirokazu Suzuki
*2
, Tetsujiro Ninomiya
*1
and
Hiroshi Tomita
*1
ABSTRACT
This report provides a comprehensive set of information on the mathematical models
necessary to develop a six-degree-of-freedom nonlinear flight simulation code for the
design and evaluation of the guidance and control law for D-SEND#2. This paper also
elaborates the sonic boom propagation model to evaluate sonic boom measurement
condition at the target boom measurement system and provides a list of modeling error
data and evaluation criteria for robustness analysis of the guidance and control law
using Monte Carlo simulation (MCS).
Keywords: Supersonic Flight, Flight Simulation, Guidance and Control
概要
本稿では低ソニックブーム設計概念実証フェーズ
2(D-SEND#2)の誘導制御則の設計な
らびに評価に用いるための
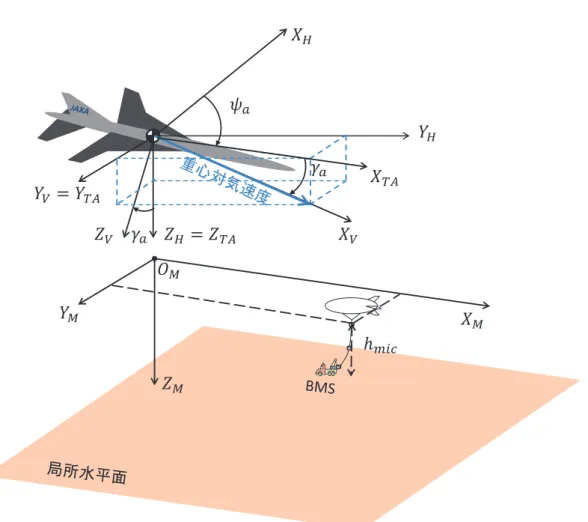
6 自由度非線形飛行シミュレーション環境の構築に必要となる
各種数学モデルをまとめる.また目標としたブーム計測システムにおけるブーム計測条件
の評価に用いるためのブーム伝播解析とモンテカルロシミュレーション(
MCS)による誘
導制御則のロバスト性解析で使用する各種誤差モデルと評価基準についても詳述する.
*1
宇宙航空研究開発機構 航空技術部門 飛行技術研究ユニット(
Flight Research Unit,
Aeronautical Technology Directorate, Japan Aerospace Exploration Agency)
*2
宇宙航空研究開発機構 研究開発部門 第一研究ユニット(
Research Unit I, Research
and Development Directorate, Japan Aerospace Exploration Agency)
doi: 10.20637/JAXA-RR-17-006/0001
*