【論 文
I
UDC :624
.
042.
7 :699.
B42日本 建 築学会構 造系論 文 報 告 集 第416号
・
1990年10月Journa且of Struct
.
Constr.
Engfig、
AIJ,
No、
416,
0ct.
,
1990予 測
型
適 応
制御
に
よ
る
可
変
剛
性
型
制
震
シ
ス
テ
ム
噂
制 震構 造
の研究
ADAPTIVE
CONTROL
WITH
PREDICTIVE
OBSERVER
FOR
ACTIvE
ADJUSTABLE
STIFFNESS
SYSTEM
Active
Seismic
Response
Controlled
Structures
小 堀 鐸
二 *,
鎌 形 修
一
* *距 ゐ
ゆ KOBORI
andShuichi
KAMA
GA
TA
The
act重ve adjustable sしiffness system is a mechanical device with the ability to detune 正rom the seismic ground motiQn.
An
adaptive controlis
newly adopted,
in
which an analytical observerprediCts
the optimal stiffness in each half cyc 【e.
From the results of a DIB analy 口cal simulator,
the control effectis
evaluated as 重he
isolation
from
the seismicdominant
components alld the can−
cellation of the resonant force by the seismic force.
Some necessary contrQl conditiQns and the re.
quired capacity of contrQl
devices
aredemonstrated
.
Keyworcls :Active・Seismic・1〜esPonse
C
(mtrol,
Active AdjustabteStt
;t
/fness
,
4daPtive
Centrol
,
Predi‘tive
Obserwe
厂,
DIB
Respanse
SPectra
1
章 序 ダ イ ナミック・
インテ リジェ ン ト・
ビル (DIB )文 4)は 制 震 構 造の基 本 概 念蜘 を能 動 的な構 造 形 式と して実現 す るもの で,
地 震 応 答 過 程を記 述 した 運動 方 程式 (1 ) か ら導いた状 態 方 程 式 (2)の考 察か ら は,
構造 特性の 動 的 調 整に よる非 共 振 化の制 震 概 念と,
構造物の質量,
減 衰, 剛 性 特 性を調 整 可 能にする装 置 化の 方 法 が 考え ら れ る文η Q M *X(t)+C
*th
(t)+K
* x{t)=
・
− M
*圦置)一 一 ・
…・
・
・
…一
・
・
………
(1 ) M :質量行 列,C
:減 衰 行列, κ:剛性行列X
{t
)=E −
’iFs
(t
)+F
。(t− dt
)ト・・
…・
・
・
・
……・
・
(2)E =
M 十α*C
十b*K・
……・
・
………・
・
…・
…
(3) Fs〔t)=−
M *雪{t)…・
・
…・
…・
・
・
………・
・
(4) Fn(t− dt
}=− G
,*th(t− dt
)− G2
*猷ε一dt
>− G3
*コσ(t− dt
>・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一
一
(5)G
,=b
*K
+d
*C ・
……・
・
……一 ・
……一 ・
・
(6)G
,=
α*K
+C ・
…・
…・
………・
…・
…・
……・
…
(7 ) G,=
K・
・
・
・
…
『
・
・
・
・
・
・
・
・
…
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(8
) α=
0.
5*dt,
〜)=0.
25
*dt2・
・
・
・
・
・
…
t・
・
・
…
一
(9 ) こ の 中で可 変 剛性 型 制 震システム は1950年代に検討し た構 造 部 材 固 有の非 線 形特性を利用した人為 的非線形特 性9!)に 新た に能 動 的な調 整 機 能を付与 し た もの で,
そ の装 置化に は可変 筋 違い 型,
可 変 関 節 型,
可 変 柱脚型等 が考え られる文6〕・
7 ) (Fig.
1)。 本 論で は こ のよ うな可変 剛 性型制震 システ ム を 用い,
制震構 造の基 本 概 念で提示し た“
地震動の卓越周期か ら 回避する非 定 常 非 共 振 化”
を実 現す る 制 御 アル ゴ リ ズム と し て,“
予 測 型 適 応 制 御又6 )・
7 )’
を新た に導入 す る。
1950 年 代の非 線 形 振 動の研 究文21で はPhase−Plane一
δ法 で解析し たが, 本 論で は電 子 計 算 機を用い,
1DIB
数 値 解析シ ミュ レー
タを構 築し,
制 震 特 性と制 震 装 置に要 求 され る性 能を評 価す る。鬮
Ac用鼠
ヒ1ve ]ractngAC 仁ive Hi e ムじtive B85e
Fig
.
1 Active ad}ustable stiffness devices2
章 可 変 剛 性型制 震システ ム 可 変 剛 性 型 制 震 装 置は,
メカニ カルな機 構で能 動 的に 剛 性を調 整する こと を想 定し ており,
そ の剛 性 装 置に付 与す べき基 本 特 性は次の よ うにま とめ られる。 * 鹿島建 毅(株)京 大 名 誉 教 授・
工博 * * 鹿 島建設 (株 ) 小 堀 研究室・
工 修Kajima Corp
.
Emeritus Plof.
of Kyoto Univ.
,
Dr.
Eng.
Ka亅1ma Corp
.
,
M.
Eng.
(
Al
) 剛 性 装 置は設 定された剛 性 を保 持す るだけで,
加 力 能 力は持た ない。
(A2
) 剛性 装 置は構 造 物の振 動 状 態に応じ て 駆動さ せ る た め, 固 有 振 動 周 期に比べ 高 速な応 答 性 をもつ。
(A3
) 剛 性 装 置は メ カニ カ ルな装置で あ り,
(9 )式で 表され る よ うに (L
。ax +1)段 階の 剛 性 状 態 が 設 定で き る。
κ(L);
KMAX−
L*K¢・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(9 )jL
:剛 性 指 標 [L =
=
O,…,
五Ma.]KM
。X:最 大 剛 性 値,
K
.:剛 性変化 幅 2,
1 半周 期 型駆動 アル ゴ リ ズム 可変剛性装置と して可変長 型,
可変断 面 積 型,
可 変 勾 配 型等の可変筋違い型制震装置を想定する (Fig.
2
)。
剛 性を可 変 化す る機 構と して,
筋違い に Slip型 復 元 力特性をもた せ,Slip
状 態か らHardening 状 態へ の遷 移 点を調整可 能に す る。
遷移点
の変形を剛 性 装 置に想 定 さ れる変 形よりも大き く設 定 すれ ば,
そ の状 態で は剛 性 装 置は構 造 物に剛 性を寄 与し ない ことになり剛性の可 変 化がで き る。
この駆 動アル ゴ リ ズム は半周期ご との弛緩 状 態で遷 移 点を 調整す る た め,
基 本 特 性 (A1
)を 満 た す構 造 系を加 振し な い駆 動が可 能に な るばか り か, 基 本 特 性 (A2 ) を 満たす 高 速 応 答 性 も 得 られや すくな る (Fig,
3 )。H
、」
Adjustable Length Type Fig.
2。
丶
1
丶、
、
関、
丶
tS tX・
、
x Kt
、
、
、
、
丶
Adjustable Adju6tableS
“
Cti°
n A「
ea Type lncli・a ヒi。 ・ TypeMechanlsm of actlve bracing
四
’
’
り
自
O隅
』
o】
o’
〆’
’
’
’
’
’
/’
’
’’
’
/ D正8P1日c 巳n【 D【
5pla[
圏
enし
龍 剛 叩凶 血 ロ D18ph己
血
nヒ
洫四
Cσ
o矼
σ
1 L囎
呂匸hFig
.
3 Basic restoring property of activebracing
図
\ 、図
×
図
◎ e…
1・
g τ19hヒ
en1 ⊥n Te“
slo“
コra・t・
8slackln8 加 Comp
【
essto”
◎ 51acki
口
g 1皿
C四
pre85iDm T正ShヒEnlng in T已
n日
ton巳ra
・
塊 ◎ コract・
g StateBmd B・
a。
i・
g ム氓iVHt正 ◎ l Slackln 巳 i隔 e【
dr±vtng 二。
prep旦
【
已
lne:
thoLf
cycle
Slocking l
Act↓veL ±ng
Unde
・
d・
iv1・
・
P・
epa・
・
i
nexし h81∈ OyOle l
Fig
,
4 Timing chart of basic driving aigorithm一 126一
半 周 期 型 駆 動ア ル ゴ リズム ; こ の可変筋違い装置を用い 構 造 物の振 動 周 期 を 調 整 する ためには,
X型に組み込ん だ可 変 筋 違い装 置を次の ように駆 動さ せ る (Fig、
4)。 (a) 変 形が半周期 ([A
]→ [B
]→ [C
])経過 する間に,
次の半周期に備え,
弛緩状態に あ る [筋違い ]の 最 適 剛性 を決 定, 調 整す る。
(b
) 変形 が半周期 ([C
}→ [D
]→ [E
])経過 す る 間 は,
〔筋 逢い ]が弛緩状 態にあ り, 次の [E
]以後.
の 半周 期に備え最 適 剛 性 を 決 定, 調 整す る。
2.
2 予 測 型 適 応 制 御 制 御工学で の極 配 置 法は, 定 常 的な振 動 特 性の設 定 法 を 示して いる が,
非 定 常な地 震 動に対して構 造 物を非 共 振 化 する ためには,
振 動 周 期 を 時々刻々調 整 する動 的 極 配 置 法が必 要である。
そ こ で半 周 期 型 駆 動ア ル ゴ リ ズb で設 定 する半 周 期ご との剛 性の選 択 法とし て,
卓 越 周 期 回避 型 制 御と予 測 型 適 応 制 御の 二 種 類の制 御ア ル ゴ リ ズ ムを検 討する (Fig.
5)。
亟 ]
mFig
.
5Scheme
ofdecisiom
logic
越周期回 避型制 御 :時々 刻々の地 震 動の周 波 数 成 分 を 分析し
,
周波数成分が最 も小さ く な る周 期 を選 択す る。
PROCESS
−
1 a 地 震 動の周 波 数 成 分 [S
,試T ,
.
f
)の 分 析 各 時 刻 [T〕で地 震 動の周波 数 成 分 [S,AT
.
f
)]を識 別 する には,
短いデー
タ から周 波 数 成 分を識 別で き る分 析 法が必 要にな る。 周 波 数 分 析 精 度を確 保す る た め に必 要 とさ れ るデー
タ長さ は分 析 法ご とに異なり,
例えばパ ワー
ス ペク トル で は2−
4周 期分のデー
タ 長 さ が 必要と さ れ る が,MEM
ス ベ ク トル は半周期 程 度の デー・
タ か ら で も識別で き る文a) 。PROCESS
−
2a 最適 剛性の選択コ
可 変 剛 性 装置によ り 選択可 能 な振動 周 期の ス ペ ク トル 値 を比較し,
その値が最小と な る剛性を選択す る。 卓 越 周 期 回 避 型 制 御の問題 点 :リ アル タイム制 御の中で は,
周期分析 法で のデー
タの取 込み時 間 は 必 然 的 な 遅 れ 時 間と なる。
そ れ ばか り か実 際の地 震 動の周 波 数成 分の継 続 時 間 が分 析 法で必 要と す る長さ よ り短い時に は
,
十 分 な精 度で 周波 数 成分 を識 別で き ない ことになる。
パ ワー
スペ ク トル は , 時系列 座標か ら周波 数 座標へ の 座 標 変 換であ り 周波 数 座 標の設 定に よ り出 力 結 果が異な る。MEM
ス ペ ク トル は予測フ ィル タ項 数に よっ て は 分 析 結 果に双峰 性があり, 出 力 と 入 力の関 係 が非 線 形で ある だめ,
・
分 析 結 果の パ ワ値か ら地 震 動の周 期 成 分が最 小とな る周 期を 選択で き な い状態 も考えられる。
いずれの分 析 法’
にせよ,
その分 析 精 度 を 満たす 長 さの 振 動 情 報を分 析し,
そ の結 果か ら最適剛性を選 択す る時,
共 振状態の よ う な漸増振 動では,
剛性を調 整し た後の振 動 成 長 を抑 制 するこ とで最 大 応 答 値を低 減で き る が,
非 共 振 振 動では,
分 析して い る間に最 大 応 答 値が生じ,
剛 性 を 調 整し て も最 大 応 答 値を低 減で き ない可 能 性があ る、
こ の よ うな非 共 振 振 動 を抑 制する に は,
地 震 動の到 達 以 前に剛 性を調 整す る“
予 測 型 制 御”
が必 要にな る。
また応 答の 成 長 過 程文1)で は,
最 大応答とな る周 期は 外 乱 周 期と一
」 致せ ず (Fig.
6),
地 震 動の 卓 越 周 期 成 分 か らの回避 を目指し た 剛性選 択 は 必ずし も応答を最 小 化 せず,時
々刻々 の 地 震 動と構 造物
の 状 態 量に応じて剛性 を 選択す る“
適 応制御”’
が必要にな る19) e匸
O贋
り
而
」 0尸
り
U曙
言 石 2ω
,
、
、
、
、
、
、
噛
dOreP
’
ジ
△
l
t.
: 1獣
、
書
Period ’1」爪
! 1臆
N・
PeHodFig
.
6 Characteristics of transient response予測 型適 応制御 :卓 越 周 期回避 型 制 御の問 題 点 を解 決す る た め
,
制御工学 での観 測器110)・
Mll) を 用い た“
予測 型 適 応 制 御”
を新たに導入 する (Fig,
7 )。 こ の制御アル ゴ リズム では 地 震動の周期 成分 を 分析す る代わ りに, 構 造 物の 振 動 状 態 を予 測シ ミュ レー
トし,
その結 果か ら設 定した評価関 数を算 定し最 適 剛 性を選 択す る。
そ の予 測 解 析では,
構 造 物の振 動 状 態 を計 測し た情 報を初 期 条 件 と し て設 定することで振動状態に応じ た 剛性が 選 択で き る。
’
耐 震 設 計の中では構 造 物 を 力学 的な振 動モデ
ル とし たFig
.
7 Adaptive control with predictive observer地 震 応 答 解析が行わ れて お り
,
構 造 物の振 動モ デル へ の 同定は比較 的 容易に行え る。
さ ら1
にDIB
で は設 置さ れ た振 動センサ か ら得ら れ る振動 情報の分析に よ り,
構 造 物の振 動 特 性 を時々刻々評 価し,
構 造 部 材の 経年変化 や 使用条 件の変化によ る振 動 特 性の変 化に も対 応す る。
定 常 振 動では部 分 的な計 測デー
タ か ら そ の周 期 を分 析 すれば,
それ以後もその周期が続く と予 測で きるが,
地 震 動では既に到 着し た地 震 動か ら次に到 着 する地 震 動 を 予測
すること は難しい。1
その ためDIB
の基 本 概 念では,
地 震 動情報の予測精 度を高め る た めに,
地 震 観 測 ネッ ト ワー
ク文】Z>の ようなイン フラス トラ ク チャを想 定し た 。 予 測 開 始 時 点の振 動 状 態の計 測デー
タiXsl
を初 期 値 に設 定 し,
予 測さ れ た地 震 動を 入力と し,N
種 類の剛 性 状 態で の各々 の過 渡 応 答を数 値 解 析的に予測 す る。PROCESS
−
3b
で 予測され たN
種 類の応 答 量か ら評 価 関数を最 適 化 する剛 性 状 態を選 択す るe 評 価 関 数 には 単一
の状態 量 (加 速 度,
速度,
変位’
)の最 小 化を目指す 加 速 度 制 御,
速 度 制 御,
変 位 制 御の ほ かに、
複 数の状 態 量か ら求め ら れ る 入力エ ネル ギー
制 御が考え ら れ る。 可 変 剛 性 装 置は メカニ カルな装 置で制 御コ ス トは小さいと 考えられ,
本 論では評 価 関 数で制 御コ ス トは評 価し ない。 3章 予 測型適 応 制 御の基 本 特性制 震シ ス テ ム の制 震 特 性を評 価 する ため
,
’
制 御ア ル ゴ ウズムと制 震 装 置にお け る以 下の条 件が制 震特性に与え る影 響を,
DIB.
数値 解 析シ ミュ レー
タで検 討 す る。
(a ) 評 価 関数 (b
) 予 測 範 囲 (cl 可 変 剛性 幅一
127
一
数 値 解 析 条件:(a) 入力 波は
,
周 期1.
O
秒のサ イン波 を漸 増 漸 減させ た非 定 常サ イン披
と し, 最大 加 速 度IOO cm /sec2継 続 時 間5.
0秒 (0.
005 秒*1000 steps)とする。
en ,。.〜 号 ・ ・H(2
・
し) 1・一
}… N(加。一
一
一
一
一
・
一
.
一
・
,
一
・
・
トー
’
.
…
一
・
曾
・
・
…
.
一
一
一
一
卜齟
幽
・
凾
・
・
一
一
一
l IOO映
1.
0 2.
0 3.
O O.
0 5.
O SeeondsFig
.
8 Non$tationary sinusoldal waveF
(t
)=0.
5*t
*sin (2πt
) 0.
0≦ t≦2.
0 = (2.
0−
0.
5* t>*sin (2πt) 2.
0< t≦4.
0=
0.
0.
,
4唖
0〈 t≦5,
0− ………・
……・
………・
…
(10) (b
)制御対 象 系は無減 衰の ユ自由 度 系と する。
(c〕 可変剛性 装置は標準剛 性 (κ。)の 10%の可 変 剛 性 幅 〔κ∂で [LMax
十1
]段 階の剛性 が 設 定できる。 K(L)=
KMax−
Kd*L L=
0,…
,LMax剛 性 指 標,
Kd = O.
1*K
。 (d
) 制 御アル ゴ リズム :予測時 間 (T
。)は 固定 時間 と せ ず 変 位 応 答 値が零 値 を横 切る回数で予 測 範 囲 を 決 める。 オブザー
バ は予 測 範 囲内で線 形と仮定する。 (e)収 束判定値 (VE
尸):非線形復元力の数 値 解 析には,
各 解 析ステップで収束 計算を用い, 収 束判定値は加速度 応 答 の変 化 率 (V
』p= IQ−
5)で設 定す る。
v
,,;1
x,一
x、−
ll/国・
……・
…7−・
一 一 …
(11 )k
:収 束 計算回数 3.
ユ 評 価 関数と制 震 特 性 加 速 度, 速 度, 変 位, 入 力エ ネルギー
制 御での制 震 特 性 を比 較 検 討する。
最 大 剛 性は標 準 剛性の 2.
0倍,
最 小 剛 性は標 準 剛 性の 0.
5倍に設 定す る。
各オブ ザー
バ の変 位 応 答が3回 零 値 を横 切る まで を予 測 範 囲とする。 応 答 時 刻 歴によ る制震特性 評 価 :標準 周 期1.
0
秒の制 御 系での応 答 (加 速 度, 変 位, 入力エ ネル ギー
)と選 択さ れ た 剛性 状態の時 刻 歴 を検 討する。
最初の半周期は標準 剛 性 が設 定されるが, 剛 性が選 択 可 能に なる半 周 期 以 後 で は評 価 関 数の違い により応 答 結 果が異なる。
(a)加 速 度 制 御 :長 周 期 化 を 目指し最 小 剛性 (L =
15 ) を選 択し ている。
他の制 御に比べ 最 大 加 速 度 応 答 値 が最 も低 減さ れ るが 変 位 応 答はさほ ど低 減さ れ ない。
4.
0
秒 以後の 自由振 動状態での変位応 答は無制御の 40 % と な る。 (b
) 速 度制 御 :外乱が漸増す る2.
0 秒まで は短周期化 する最大剛性 (L
=O
)を 選択し,
外乱が漸 減す る2.
0 秒以後で徐々 に小さ な 剛性を選択 し てい る。
(c) 変 位 制 御 :短 周 期 化 を 目 指し最 大 剛 性 (L
==O) を 選 択し, 他の制 御に比べ変 位 応 答が効 果 的に抑 制され, 4.
0秒 以 後の 自 由振 動 も抑 制 され る。 (d> 入力エ ネル ギー
制 御 :3.
0秒 以 前は最 大 剛 性 (L.
−
128
一
=0
)を 選 択 し,
3.
0秒 以 後の半 周 期では標準剛 性に近 い剛 性 を選 択して い る。
4.
0秒 以 後の 自 由振 動も抑 制さ れ るQ 四種 類の評 価 基 準に よる制 御 状 態 を概 括 する と,
入 力 エ ネルギー
制 御が最も安 定した制 震 効 果を与える。
速度制御と 入 力エ ネル ギー
制 御で は,
地 震 力の 卓越 周 期か ら回避 す るばか り で な く,
地震力が漸減す る過 程で は卓越 周期に接 近す る周 期 が選 択さ れ る。
こ れ は (2 ) 式で示 された共 振 力の位 相を 調整し,
地 震 力 と 相 殺 さ せ る事で瞬 間 作 用 力 を 小さ く す るもので,“
地 震 力の制 震 力 化”
とでも呼ぶ べ き 制 震メカニ ズム で あり,
固 定 的な 構 造 特 性で は偶 然の現 象で しか な いが,
こ の可 変剛性 装 置に よ る構 造 特 性では必 然の現 象と し て利用で き る文13 〕.
, 1000Ctn!eec2rF
−一一 一
一・
一・
−A
・・‘
>
cl2t
_一
・
Ikttk
卩
一
Lkロ
O.
5k。−
2.
Ok。
AoceユeXh
【
ien 2s・
ト
ー
一 》瓣
‘
entem 巳ooo 、i
,
Di叩厘¢ ヒ
n :ノ
エnpaし
Energy O.
0 St 廷f員巴8s s匸就eL ) LO Z.
0 3,
Q 4.
O Accelera 亡10n Centroユ 5.
0(see 〕 2stU・
ト
ー
see。 t。
・
賈
e・
Oi5P工旦
s“
”
en【一
’
一
_
,
t’
m
とo 【n 四 じEnergy、
cmtsec2loe・
卜
一
一
A匸
c巳
工嵒
【
Etton一
O.
O 1000卿
LO s【
且
e88 tbte L 2.
0 3.
0 ら.
O VelDC 重ζy Con亡ro15
.
0 (日
ee> 15tU・
ト ー
8000tqn +四 n±ep1°
cene ・ し eoleec1F
−
一 一 ・一 ・S
・cv
・・l
AtCElere【
ton 20 1囗四ヒeneT8y 0.
D 且鹽
0 2.
0 3.
0 4,
0 D工6plac ent Con匸rol5
■
0〔8已
ロ
}ロ
ノ8e〜聖
ト ー
25 AccelΩ
=
at⊥oロ
F
− ・・1
}
−
av
tOP禽
cm8000 ,u
Displocement−_
vNInPut
巳ロ
e:
gy St±ff旦
eSE sヒ
a【
e 匸 一 〇.
0 且.
0 2.
0 3.
0 4.
O Inpuし Energy Con仁TO15
.
o 〔eee )qO
咽
凵
叩
随
四
耐
OU口
《
10DD30050Ooeoloo 15 鼕2el ・・ 吾・
。
Perlod Feriodcrzlsecl50D
D む
「
り
o
月
四
,
前
【
08 脚 h障
自
」
引
口
四
馴
コ
』
口
円
PCTtod PeriOdFig
.
10 DIB maximum response spectra1
、
DDIB
応 答ス ペ ク トル に よる制 震 特 性 評 価DIB
数値 解 析シ ミュ レ厂 タ の解 析 結果か らDIB
応 答ス ペ ク トルNG) を 求め, 評 価 関数の違い が制震特 性に与え る影響を比較 する (Fig.
10)。
DIB
応 答ス ペ クトル で の周 期は標準剛 性 を設 定し た時の周期と する。
(a)最 大 加 速 度 応 答スペ ク トル :加 速度 制御が最も振 動抑制が大 き く, 応 答 曲 線 は 周 期 1.
0
秒で最大 値 (200 cm /sec2)と な る。
変 位 制御の応 答 曲 線では 周期 1.
2 秒 で最 大 値 (420cm /sec! )・
とな る。
(b
) 最 大 速 度 応 答スペ ク トル :速 度 制 御が最も効 果 的 な制震 効果を 示 し,
外 乱の周 期よ り長い 1.
1秒の周 期で 最 大 値 (40cm /sec )と な る。 加速度 制 御は周 期 1.
0秒 で最 大 値 (50cm /sec )と な るg (c) 最大 変位応答 冬ペ ク トル :変 位 制 御が最も 効果 的、
な制 震 効 果 を示し, 速度制 御と同様に,
周期1,1
秒で最 大 値 (6.
5c
皿 )とな る。
加 速 度制 御は外 乱周期と 同 じ 1.
0
秒で最 大 値 (9,
5c
・n )と な る。
』
(d
)最大入力
エ ネルギー
ス ペク トル :速度 制 御と入 力 エ ネル ギー
制 御が最も効 果 的な制震効 果を示し,
1.
1.
秒 の周期で最 大 値 (700ton *cm )と な る。
これに比べ,
加 速 度 制 御, 変 位 制 御の最 大 値は約 2,
0
倍と な る。
最 大 応 答 値の最 小 化 を 目 指した本 節の評 価 基 準では,’
[PROCESS
−
4b
]で の 評 価 関 数 (VPJ(i))は可 変 周 期 範 囲で求め た過 渡応答曲線にほ か ならず,
本 節で用い た単一
周期成分の入力 波での 評 価 関 数は, 可変周 期 範 囲によ り,
単 調 増 加か,
滑らか な凸 形, ま たは単 調 減少と な る。
こ の ため, 最 適 剛性は, 最 大 剛 性と最小 剛性での評価関 数 が 等し く な る周 期 (限 界 周 期)を境に し, 短 周期域で は硬 化 剛 性が,
長 周 期 域で は軟 化 剛 性 が選 択され る。
こ の結果DIB
応 答 曲線は 過渡応答 曲線を可変周期だ け移 動さ せ た‘
’
最 小 包絡曲 線” と な る (Fig.
ll
)。
同 じ 可 変剛性幅で も,
応答曲線の形状が加速度,
速度,
変位 で異な る た め,
限界 周 期は加 速 度 制 御では外 乱 周 期 より 短周期
に, 変 位制御では長周期に, 速 度又 は 入力エ ネルの
雪 H°
} 〉 黠8
駐 醒5
口 耀2
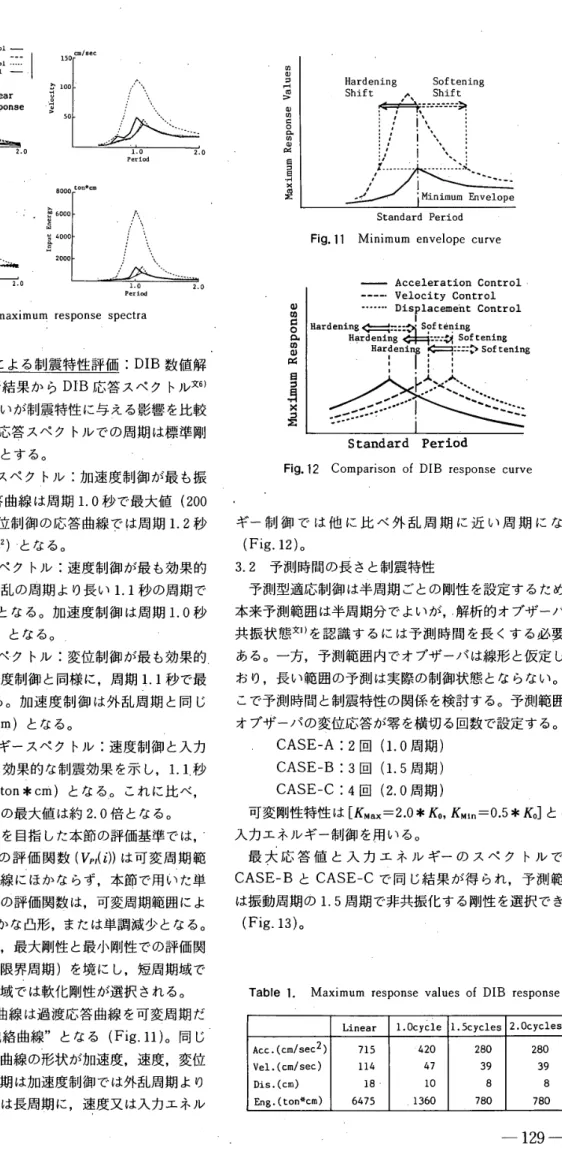
Standard Pe=iod Fig.
11 Minimum envelope curveAcce工era匸ion Con巳ro1
器 呂
a
畠
塁
鳥 曇 Standard PeriDdFig
.
12 ComparisQn of DIB respo 皿se curveギ
ー
制 御 で は他 に 比べ 外 乱 周 期に 近い 周 期 に な る (Fig.
12
)。3.
2 予測 時間の長 さ と制震特性 予測型適 応 制 御は半周期ごとの剛 性 を 設定す る た め, 本 来 予 測 範 囲は半 周 期 分で よいが,解 析 的オブ ザー
バ で 共 振 状 態文1)を 認 識 する には予 測 時 間 を 長くする必要
が ある。一
方,
予 測 範 囲 内で オブザー
バ は線 形と仮 定し て おり,
長い範 囲の予 測は実 際の制 御 状 態とな らな し そ こ で予 測 時 間と制 震 特 性の関 係 を検 討 する。 予 測 範 囲 を オブザー
バ の変 位 応 答が零を横 切る回数で設 定する。
CASE−
A :2回 (1.
0周 期)CASE −B
:3回 (L5 周 期 )CASE −C
:4回 (2.
O周 期)可 変 剛性 特 性は [
KMax
= 2.
0
*K
。,
KMI
.=O.
5*K
。]と し,
入力エ ネル ギ
ー
制御を 用いる。
最 大応 答 値 と入 力エ ネル ギ
ー
の ス ペ ク トル で はCASE
−
B と CASE−C
で 同じ結 果が得ら れ, 予 測 範 囲は振 動 周 期の 1
.
5周 期で非 共 振 化 する剛 性を選 択で きる(
Fig.13
)。
Table 1
.
Maximum response values of DIB responseLinearLOcycle1
.
5cydes2.
O⊆yこ1es ACC.
(cm1 ・ec2 ) Ve1.
(。m!sec ) Dls,
(こm) EnB.
(し。n廿cm) 715114 186475 420 47 101360 28039 8780 28039 8 ア80一
129
一
8000
幹
6。。。 型巴
, 4000言
2000 し qロ
兎 cmPredi
⊂
ヒive Tilne、 1
・
Ocycle…・
…
へ
i
;
:1
認
:
:= 丶 linear\
/
R・sp。・se’
ハ1
.
0 2.
O PeriodFig
.
13 Comparison of DIB response spectra期 域では最 小 剛 性を選 択す る が
,
い ずれの解 析ケー
ス も 最 小 剛 性は同じ た め応答曲線は同一
に な る。 可 変剛性型 制 震 シス テム は 過 渡 応 答曲線の可 変 周 期 範 囲で の最 小 値 を選 択す る た め,
可変剛性 幅が大きい ほ ど 応 答 値を小さ くでき る が,
いずれ の周 期で も応答値を零 に は でき ない た め 完 全 な 応 答 抑 制 はで きず,
あ る 程度の 応 答は不 可避 と考え ら れ る。
最 大剛性と最 小剛性の比率 を4.
0
倍と し たCASE −B
で は,
周期1.
0
秒の共 振周期 で の最大 加 速 度 応 答が入力 加 速 度の 3.
0倍と なる。
3.
3
可変剛性 幅と制 震 特 性 可 変 剛 性 幅は非 共 振 化 を実 現する ための基 本 的な特 性 と な る。 そ こ で可 変 剛 性 装 置の可 変 剛 性 幅をパ ラ メ タ に したDIB
応 答 曲 線か ら制 震 特 性 を評 価 する。
三 種 類の 可 変 剛 性 幅 を設 定する。
CASE −
A :K#
O,
5*Ko−
1.
5*Ko (11 段階)CASE −B
:K ・
−
O.
5*κ厂 2.
0*Ko
(16段 階)CASE −C
:K
; O.
5*Ko−
2.
5*Ko
(2ユ段 階) 評価 基 準は入力エ ネルギー
制 御と し, 予測 時間範囲は 各 オブザー
バ の 1.
5周 期の範 囲 とする。
CASE−
B とCASE −C
で最 大 加 速 度 応 答 値が ほ ぼ 同 じと な る結 果を除け ば,
可 変剛性 幅が 広い ほど最 大 応 答 値が小さ く な る。CASE −B
で は無 制 御に比べ,
い ずれ の最大 応 答 値も40%程 度と な り,
入力エ ネル ギー
は12 % と な る。
DIB
応 答スペ ク トル とし て最 大エ ネルギー
スペ ク ト ルを 例 示 する (Fig.
14)。 限 界 周 期は, 選 択でき る最大 剛性と最 小 剛 性の相 対 的 関 係で決ま る ため,
最 小剛性に 比べ最 大 剛 性 が大きい ほど 長 周 期にな る。
限界周期よ り 短 周期 域で は最 大 剛性 状 態 を 選 択し,
限 界 周期より長周Table
2.
Maximum response values efDIB
response Llnear1.
5曇ko2.
O畳k。
2.
5膏k。
八・
c.
(c阻1seこ2) Ψe1.
(c皿/sec > Dls.
(こm ) Eng.
(し。 ロ脅cm ) 715 114 186475 500 61 132120 28039 8780 28033 6560 800D OOO6 OOO4 島 鵠 口 国”
コ 含 HOOO2AdjUStable Stiffness Ramge
匸On★cm k
=
O.
5k。−
1.
Ske…・
・
.
k昌
D.
5k。
−
2.
OkD−一
一
■
k=
0・
5ko−
2.
5ko一
八 1 」 “neaTl
丶
/
R・ ・P。 … ノA
’・
、
.
∴
毎
\
・
・
.
.
.
.
』
』
.
.
.
4
章 地 震 動に対 す る 制 震 効 果 地 震 時に は,
様々 な周 期 成 分が同 時に又は順 次に到 達 し, こ れ ら の周 期成分の帯 域 幅や継 続 時 間の特 徴は制 震 効 果に影 響を与え る。 前 章で確 認さ れ た予 測 型 適 応 制 御 の基 本 的 制 震特性を,DIB
数値解析シ ミュ レー
・
夕 で得 られ る地 震 応 答 時 刻歴
とDIB 地 震 応 答ス ペ ク トル で再 確 認 する。 さ らに これらの結 果か ら地 震 動に対 し要 求さ れ る制 震 装置の性 能 特 性 を評 価する。
数 値 解 析 条 件 :(a) 入力 波:エ ル セ ン トロ (NS )1940, タフ ト (EW
>1952の こ 波の地 震 記 録 波 を,
最 大 加 速 度 100cm /sec2,
継続時 間20.
0秒(O.
005秒*4000 steps > と して入 力 波 と す る。
(b
) 可 変剛性特 性 :標 準剛性 (h
。)の10
% ご と に多 段 階の剛 性 設 定 が 可 能 とする。
κ(L)=
KM邸一
L* κ己 L=
0.
…,
五MaxK
,=
O・
.
1*Ko
(c) 制 御ア ル ゴリズム :ずブザー
バ で の予 測 時 間は変 位 応 答 値が零 値を3回横 切る範 囲とす る。
地 震 動の非 定 常 特 性 :本 解 析で用い る地 震 記 録 波の非 定 常 特 性 をランニ ン グ・
パ ワ・
スペ ク トル で分 析する、
デー
タ取 込み時 間を2.
0秒 間, 解 析 デー
タ長さ・
を10.
24 秒とし0.
1秒 間 隔で解 析 を行っ た (Fig.
ユ5
)。
2 4。09,
miseEt
W
、e,ec Hz86 8 4ワ.
メ1
》、
−
2‘
縫
蹇
}
コ 圏 1,
卜O.
昌 團o.
ε一
〇.
5 口0、
5−
0.
2 1,
0 2.
O PeriodMaxi
田
u田
Response SpectraFig
.
14 Comparlson of DIB response spectra2 4 6 8 10 12 14 15 185ec El C巳ntroCN5 }
匸
m!〜e匚2200ト
t
W
。、ec H! 8642 囮 亠.
O國
O,
8 田 O.
8−
0.
5t・
=
沁’
Sa
ロ D.
5−
o.
2む
ご曇舅
笹
5f’
フc・
=
’
tt t「
.
並三
.
{r.
.
2 4 6 8 10 12 14 15 18se匚 T邑ft 【E凵〕Rg
.
15 Running poweτspectraエ ル セン トロ波は
,
2.
、
O秒から4.
0秒に かけて1.
5Hz 付近の周 波 数 成 分が卓 越 する。
こ の卓 越 成 分は最 大パ ワ 値を50 %低 減し た状 態で 1.
OHz の帯 域 幅が あり, さ ら に 20% まで低 減 した状 態で は 3.
OHz 以 上の広い帯 域 幅が あ る。 タ フ ト波は,
7.
0秒か ら9.
0秒に か けて 2.
OHz
の 卓 越 成 分が あ り,
そ の帯 域 幅は 0.
4Hz 程 度で エ ル セ ン ト ロ波に比べて狭 帯 域で,
周 期 成 分の継 続 時 間が長い。
こ れら の結 果はタフ ト波の記 録さ れた地 盤は,
エ ル セン ト ロ波の地 盤に比べ,
硬 質な 地 盤特 性である ことを示し て いる。 4.
1 応 答 時 刻 歴で の制 震 効 果の評 価 標 準 周 期 LO 秒 系で可 変 剛 性 装 置の 最 大 剛 性(K,ax} を,
2,0*K。,
最 小 剛 性 (KMt.)を0.
5*K
。とし た時の応 答 (加 速 度,
変位,
入力エ ネル ギー
)と剛 性 状 態を表す 剛 性 指 標 (L)の時 刻 歴を示す (Fig.
16 )。
無 制 御 状 態の応 答 特 性 :エ ル セ ン トロ波の 4.
0秒 付 近の 主 要 動は ユ.
5Hz 付 近に広 帯 域の周 期 成分 をもつ ため,
LO
秒の 周期 系の 入 力エ ネル ギー
も 比較 的 大き く な る が, そ れ 以後は無 減 衰に も か か わ ら ず 入力エ ネルギー
は る偶 然の振 動 抑 制 と考え ら れ る。
制 御 状 態の応 答 特 性 :エ ル セ ン トロ波で は 4.
0秒 付 近の 主 要 動を回 避す る た め に, 最 大 剛性と最 小 剛 性が交 互に 選 択 され,
制 御 対 象の入 力エ ネルギー
は 10 % 程 度に低 減さ れ る。
制 御 対 象 以 外の最 大 変 位 応 答は40% 以 下に 低 減 さ れ る が,
最 大 加速度応答は さ ほ ど低 減さ れ な い。 タフ ト波では10.
0
秒まで は標 準 剛 性が 選択さ れ る状 態が多く,
振 動は無制御状態と さ ほど変わ ら ない。10.
0
秒 以 後で は,
最 大剛性や 最小剛性が 選択さ れ る状 態が 多 く な り,
振 動 抑 制 効果が顕 著に な る。
いずれの地 震 波に対して も,
基 本 的な制 震 特 性で確 認 された非 共 振 化を必 然の もの と する事で振 動 抑 制し て い る。 4.
2DIB 地 震 応 答ス ペ ク トル で の制 震 効 果の評 価DIB
地 震 応 答スペ ク トル を用い て予 測 型 適 応 制 御に よ る可 変 剛性 型 制 震シ ス テ ム の制 震 効 果を検 討する。
可 変 剛 性 範 囲は標 準 剛 性 (K。)に対 し軟 化 域を同一
に し硬 化 域だけを変 化さ せ た 二種 類を設 定す る。
ユ000 次 第に小さ く な り,
後 続の地 震 動が構 造物の振動 を抑 制.
a 800 ・雌
・ ・n
・・ .
・
鞭
タフ ト波の
8,
0秒 付 近の主 要 動は2.
OHz
付 近に狭帯羣
4°D 200 域の周 期 成 分 を もつ た め,
1.
0秒 周 期 系の入力エ ネル ギー
は大き くな ら な いが,
10.
0秒 以 後 徐々 に大き く な る。 15e〜 DIB Response層
一
一
「
k=
0・
5ku−
1・
5.
ko−
kiO匸
5ko−
2,
0koへ〆 Llnear Resp。nse
」
’
L丶、
.
一
}
丶」
1t
”
一
.
’
tt’
缶
1.
0 2.
0 3。
D 4.
0 ?eriod {s巳c.
) 0001OOB006OD4DO2目
O膚
“
σ図
如 州 OUU く ノ8eC2 D工B Response¶
一
一
’
kヒ
D・
5k。−
1.
Sk囗
丶一
k・
・5k.−
Z・
。k.
》 Linear Resp。n8e
この周 期 系は無 減 衰 系にもか か わ らず入 力エ ネルギ
ー
の減 少過 程が見 与れ, こ れ は 地 震 力 と 共 振 力の相殺によ 2 個薗〆3酷
自 3DO 宀 Af 9 )ロ
Aこ
eeleTAtiロ
n ユロトー
L。
躍 駄 八・
^ 2 畝 語。
5煢
ム ニ 獄 1DDO t°
n胄
en D獅 ↓a ¢皀
・
【
一”
ハ、一
閉
’
、
一
凵
り
、
隔
一
一
、
r
L.
一
一
r
20 1npuL Enelgy.
−
S匸tffte6eStfite〔L )
●
」
.
5・
0 10.
O IS.
0 20.
O EI Centro (NS ):
mleecl3DD an/Se[ 6D 0 自 02 ご ℃ oH ω 〉’
A 戸1
ゴ
鋼
1.
0 2.
D 3.
O 有.
O Peτi匸
d(5ec.
) t 1・
0 2■
0 3.
0 4畠
O PeriOd (see.
) 0403 じ 880d・
OZ・
ユ τ e PO よ cmlsec60 04 02 台 冒。
州 9 山 20 基 §15畳
・・ 羞 5の
1 」 財二
1
細
SOO tan貞
em D孟8P1邑
二
凹
訥
e“
【へ
_
.
.
_、,
ゾ
ー一
ビ丶一押
Inp“
tEneTgy 15eo DOOL 005 お 葛 質 国
け
乱 β 【onkcro 工,
0 2甲
D 3,
0.
4・
O Perled (S2c.
)碑
o
,弘
し
訟
S匸tffne
日
日
S【a 【e(L ) 5.
0 10.
O IS.
O Taft (EW )Fig
.
16’
Response吐ime hlstory20
.
e 1.
0 2.
0 3.
0 4.
O Peried ($ 巳C.
コ.
EI Centro(NS) 1500 お 胆0008苴
5。。 9 1.
0 2.
0 3.
0 4.
e P已τiod(6ec.
) tom±am“
t
ハ
/ \魯
、.
.
∵ 》 i.
0 2.
0 3・
O a・
O Period (sec.
) Taft (EW)Fig
.
17 Comparison of DIB response spectra
CASE −
A :KMax#
1.
5*Ko, κMm=
0.
5*Ko
CASE −B
:KMax=
2.
0*Ko,
KMin=
O.
5*K。入力エネル ギ
ー
制 御とし,
予 測 範 囲は 1.
5周 期と する。
(a) 最 大 加 速 度 応 答ス ペ ク トル :応答 曲 線は,
周 期が 長く なる に従い単 調 減 少し,
地 震 波や可変剛 性 範 囲の違 い も応 答 曲線に さ ほど影 響 を 与え ない。
最大 剛性と最小 剛性の 比率を 4.
0
倍と し たCASE −B
の 応答曲線は, 全周期域で 入力 加 速 度の2,
0
倍 以 下と な る。
こ の結 果は, 前 章で 同じ可 変 剛 性 特 性で示され た 3.
0倍の応 答 倍 率に比べ て小さいが,
こ れ は地 震 動の最 大 加 速 度 がさま ざまな周 期 成 分の重ね合 わせ である た め で,
こ の応 答 曲線か らは地 震 動に含ま れる周 期 成 分の比 率を評 価で き る。
(b
) 最 大 速 度 応 答スペ クトル :応 答 曲 線は, 周 期に か か わ らずほ ぼ一
定 値 となる。
エ ル セン トロ波は卓越 周期成 分が広 帯 域に及ぶ た め
,CASE −A
とCASE −B
の 可変剛性 幅の違い程 度では顕 著な違い は見られ ず, 周期 1
.
0秒 付 近 と3.
0秒 付 近に応 答 ピー
ク が残る。 タフ ト波 は卓 越 周 期 成 分が狭 帯 域である た め,
CASE−
A で は周 期 1.
8秒 付 近に応 答ピー
ク が残る が,CASE −
B で はこ の応 答 ピー
ク も な く な る。
(c) 最大 変 位 応 答ス ペ ク トル :応 答 曲 線は,
周 期が長 く な る に従い単 調 増 加する。
エ ル セ ン トロ波はCASE −
A
とCASE −
B と もに周rw
3.
0秒 付 近に応 答ピー
ク が残 るが,
可 変 剛 性 幅 を 広 く設 定 した方が,
最 大 応 答 変 位は 小さ く なる。
タフ ト波はCASE −A
で は周期 1.
8 秒付近 に応 答ピー
ク が残るが,CASE −B
で はこ の応 答 ピー
ク もな く な る。
(d
) 最 大エ ネル ギー
ス ペ ク トル :CASE −A
で は地震 動の周 期 成 分 を 反 映 し た ピー
クがわずか に残る が,CASELB
で は ほぼ一
定 値の エ ネルギー
曲 線にな る。
エ ル セン トロ波に比ぺ卓 越 周 期の帯 域 幅が狭い タフ ト波で は ほと ん ど応 答ピー
クが残ら ない。 CASE−
B の全 周 期 域で の平 均 値はエルセン トロ波で105ton
* cm タフ ト波 では 120ton*cm と な る。
制震特性の評価:周期が長く な るに従い,
加 速 度応答曲 線は単調 減少し,
変 位 応 答 曲線は単調増加す る。
速度応 答曲線 は 周 期にかかわ らず一
定 値と な る (Fig,
18
)。
地 震 動固有の周期 特 性が応 答 曲 線に表れず, その結果 いずれの地 震 動でもほ ぼ同じ応 答 曲 線 とな る。
この特性 は 地 震 動の不 確 定さ か ら構 造物を解放す る。
二
〇
Hり
口
臼肖 O
り
O く八
9
猷
、
1
’一
一
一 :i ::. . Per二〇d一
D工B Response・
一
一
一
Line巳r Response 基『
§!
、
叩
n
,
冒
H /
、
、
.
t
丶 n,
’
丶
a「
、
一
祠
自 Period/
/
Per±od Fig.
18 Characteristics of DIB response spectra一
132
一
最 大 剛 性と最 小 剛 性の 比率を4.
0倍とし たCASE −B
で は,
異な る卓 越 周 期 特 性の 二種 類の記 録 波 を入 力 地 震 波とし て も,
地震動の卓越 周期 成分を回 避する ことに よ る非 共振化が ほ ぽ 達 成 さ れ る。
こ の 時,
可 変 剛 性 装 置の 可 変 剛 性特性と しては, 地震 力に か か わ ら ない基 本 骨 組 の水平剛性が最 小 剛性と して与え ら れ る た め,
こ の最 小 剛 性の3.
0倍の剛 性を負 担でき る能 力を設 定す る 必要が あ る。5
章 結 論 従 来の構 造 部 材 が剛 性 と耐 力で地 震 動に対 抗す るの に 対し,
可 変 剛性 型 制 震システム は地 震 動の卓 越 周 期か ら 構造物の 固有周期を回避する事で振 動 抑制する。
まず 可 変 剛性 型 制 震 装 置の基 本 特 性 を 示し, 半 周 期 型 駆動アル ゴ リ ズムを提 示 し た。
次に各 半周期で の理想 的 な非 共振化を可 能にする剛性を 選 択する ため予 測 型 適 応 制 御 を新たに導入 し た。
DIB
数 値 解 析シ ミュ レー
タ を用い,
こ の制 御ア ル ゴ リ ズム で の可 変 剛 性型制 震シス テムの制 震 特 性を数 値 解 析的に検 討し た。 基 本 的 制 震 特 性 :非 定 常サイン波 を入力 波と して基 本 的 制 震 特 性 を検 討した。
まず 選 択され た剛 性の時 刻 歴 結 果 か らは, 地 震 動の周 期 成 分 を 回避 する“
非 共 振 化”
の制 震メ カニ ズムば か り でな く,
構 造 物の振 動 状 態を調 整し 共振 ポテ ン シャルカの位相を調整する ことで,
地震力を“
制 震 力 化”
する制 震メ カニ ズムが示 され た。 これによ り主 要 動 以 後の振 動 抑 制が効 果 的に行わ れ る。 次に DIB 応 答スペ ク トル の応 答 曲 線の分 析に よ り予 測 型 適 応 制 御に よる非 共 振 化の特 性 を,
可 変 周 期 範 囲 内 で の最 小応 答 値 を 包 絡し た “ 最 小 包 絡 曲 線”
と して説 明 し た。 さ らにオブザー
バ で の予 測の必要 範 囲と,
可変剛 性 幅に固有な最 大 応 答 倍 率を評 価し た。 地 震 動に対す る制震特 性 :次に地 震 波を 入力 波に して応 答 時 刻 歴 とDIB
地 震 応 答スペ ク トル を検 討し た。
時 刻 歴 応 答 結果か ら は, 線 形 応 答 系で は偶 然で し か な い非 共 振 化や地 震 力の制 震 力化の振 動抑 制メカニ ズムが 必然の結果と して得ら れ ること を示し た。
可変剛性 型 制 震システム に よ るこれ らの制 震 特 性は, 地 震 動に固有な 周 期 成 分の影 響を構 造 物の応 答に生じ さ せず,
地 震動
の 不確 定さに対す る構造 形式と して の可 能 性を示して い る。
DIB 地 震 応 答ス ペ ク トル で は,
加 速 度 応 答 曲 線は周 期が長く なる に従い単 調に減 少し,
速 度 応 答 曲 線は周 期 に か か わ らず一
定 値に な り,
変 位 応 答 曲線は周 期が長く な るに従い 単調に増 加す る。DIB
地 震応答ス ペ ク トル では可変剛性 幅をパ ラメタに し て,
可変剛性装置に要 求 さ れ る 可変剛性 範囲 と振 動抑制 効果の定量的関係を 評 価 し た。
参考 文献
.
ユ) 小 堀 鐸二,
南 井 良一
郎:地 震に よる構 造 物の非 線 型 振 動 に つ い て (その ] 構 造物力 学特性 の 必 然 的 非 線 型 化 過 程1,
日 本 建 築 学会論文 報 告集,
第52号,
pp.
61−
69
,
1955年9月 2) 小 堀 鐸二,
南井 良一
郎 :地 震による構 造 物の非 線 型 振 動 につ い て 〔その 2 構 造 物 力学特性の人 為的 非線型 化 過 程 ),
日本 建 築 学 会論文報告集,
第52号,
p.
41,
1956年 3月 3) 小 堀 鐸二,
南 井 良一
郎:制震 系の解析 〔制 震 構 造 に関す る研 究1),
日本 建 築学会 論 文 報 告 集,
第66号,
pp.
253〜
256,
1960年10月 4) 小 堀 鐸二 ほ か :制 震構造の新しい展開一
ダイナ ミッ ク なイジテ リ ジ
ェ
ン ト ビルへ の アプロー
チー
日本 建築 学 会 学 術 講 演 梗 概 集,
1986年8月 5) 小 堀 鐸二,
金 山 弘 雄,
鎌 形 修一
;制 震 構 遣に関 す る 研 究 :DIB システム の提 唱 :第7回 日 本 地 震工学シンポ ジウ ム,
1986年12月 6)小 堀 鐸二,
久保田俊彦,
鎌 形 修一t
:DIB 設 計 体 系の構 築一
DIB 応 答ス ペ ク トルー
予 測塑適 応 制 御・
可 変 剛 性シス ) 7 8G》
10).
11) 12} 13) テムー
日本 建 築 学 会 学 術 講 演 梗概 集, 亅988年10月 T.
Kobori,
H.
Kanayama,
S.
KamagaLa :APrDposa 且ofNew Anti
.
Sei,
smic St[uctures with Active Seismic Re・
sponse Controt−
Dynamic Inteltigent Building.
,
gth WCEE,
SE −
11,
PP.
咽一
465〜
皿一
470,
Kyoto,
Aug.
8,
1988日野幹雄; スペ ク トル解析
,.
朝倉書店,
1977年M
.
Sa皿chez :Adaptive.
Predictive Control System,
U.
S.
Patent No.
4197576,
1980D